Результат интеллектуальной деятельности: СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИОННЫХ СООБЩЕНИЙ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ УПРАВЛЕНИЯ И ДИАГНОСТИКИ
Вид РИД
Изобретение
Изобретение относится к области железнодорожного транспорта, в частности к системам управления и диагностики магистрального и маневрового подвижного состава: электровозы, тепловозы, газотурбовозы; мотор-вагонного подвижного состава: электропоезда, дизельпоезда; и может быть использовано в различных микропроцессорных системах, где установлены требования повышенной надежности и достоверности информационных сообщений.
Известен способ передачи информационных сообщений дублированием передачи информации с одновременной работой двух комплектов оборудования линий связи, используемый в системе автоматического управления торможением поезда САУТ-Ц и САУТ-ЦМ (RU 2283786) и системе автоматического управления движением пассажирского электровоза УСАВП (RU 2273567).
Зарубежным аналогом является европейская система управления и обеспечения безопасности движения поездов ERTMS/ETCS (Э. Вояновски. Испытания новых систем управления движением поездов в рамках проекта ERTMS, «Железные дороги мира», №12, 1998 г.), основанная на непрерывном обмене информацией между напольными и локомотивными устройствами, использовании бортового компьютера и интеллектуальных датчиков, которые позволяют определять местоположение поезда с высокой точностью. Система состоит из трех уровней управления, позволяющих реализовать эксплуатационные режимы в зависимости от степени оснащенности линий напольным оборудованием и обеспечивает: регулирование скорости поезда в зависимости от передаваемых с пути на локомотив данных, сформированных на основе показаний кодовых сигналов; безопасность движения поездов без использования напольных сигналов, с сохранением разделения линии на блок-участки, определение местоположения поездов и контроль их полносоставности; управление и обеспечение безопасности движения поездов без использования напольных сигналов с подвижными блок-участками (определение местоположения поезда и контроль его полносоставности осуществляются бортовыми средствами локомотива).
Основными особенностями системы ERTMS/ETCS являются: избыточность аппаратных средств, большого количества (у каждого светофора) напольных приемо-передающих и измерительных устройств для обеспечения надежного двустороннего обмена цифровой информации между ними и локомотивами; сложная инфраструктура железной дороги, заключающаяся в необходимости строительства центров блокировки на базе радиосвязи для регулирования интервалов попутного следования поездов при помощи контролируемых по радио стационарных и подвижных блок-участков; сложность функциональных схем, заключающаяся в использовании специального модуля передачи для обеспечения совместимости работы точечной и непрерывной АЛС.
Эти особенности обусловливают несовместимость системы ERTMS/ETCS с имеющейся инфраструктурой российских железных дорог, адаптация которой потребует больших затрат и, следовательно, практическую невозможность использования этой системы в ОАО «РЖД».
Известен способ передачи информационных сообщений в трехканальном устройстве для управления блоками исполнительных реле (RU 2292113), которое относится к устройствам управления, в том числе микропроцессорным, железнодорожными системами автоматики и телемеханики. Надежность передачи данных обеспечивается применением тройного дублирования. Для этого в устройство, содержащее три источника импульсных сигналов ИИС, три блока питания БП, три блока источников сигналов управления ИСУ, три выходных ключа ВК, три устройства контроля выходного ключа УКВК, блок исполнительных реле БИР, дополнительно введены три модуля сбора информации МСИ, три процессорных блока ПР, три блока памяти ПАМ и, соответственно, три канала передачи информационных сообщений в цифровом коде, в каждом из которых имеется собственный блок питания в виде модуля безопасного контроля и отключения МБКО, в состав которого входят устройства контроля напряжения выходных каскадов ВК и оперативного отключения ИСС. Блоки ИСС, ВК, УКВК, и их взаимные связи объединены в модуль выходных усилителей МВУ, предназначенный для выдачи сигналов управления через блок ВК, на исполнительные реле БИР и сигналов управления через ИИС в МБКО. Блок ИСУ, блок ПР, блок ПАМ и их взаимные связи объединены в модуль контроллера МК, предназначенный для контроля состояния исполнительных реле БИР, выходных ключей ВК и напольного оборудования. Входы и выходы модулей устройства для управления блоками исполнительных реле соединяются каналами передачи информационных сообщений, соединители которых подключаются в определенном порядке, обеспечивающем тройное дублирование системы.
Наиболее близким аналогом, принятым в качестве прототипа, является способ передачи информационных сообщений в бортовом информационно-управляющий комплексе высокоскоростного поезда (RU 2238208), относящемся к управляющим системам, используемым для управления высокоскоростными поездами с обеспечением безопасности движения.
В прототипе представлена следующая структура решения задачи управления движением высокоскоростного поезда с применением дублирования обработки и передачи данных между четырьмя информационно-управляющими системами. Первый адаптер интерфейсов обеспечивает обмен информацией по последовательным каналам RS-232, RS-485 CAN-Bus. Второй адаптер магистральных каналов обеспечивает обмен информацией по магистральным каналам [ГОСТ 26765.52-87 (MIL-STD - 1553В Notice I и II)]. Системная интерфейсная магистраль выполнена по стандарту VMEbus ANSI/IEEE 1014-1987 (IES 821 и 297) и служит для информационного обмена между бортовой вычислительной машиной, первым долговременным запоминающим устройством, адаптером последовательных интерфейсов, адаптером магистральных каналов информационного обмена, блоками ввода-вывода, контроля исправности системы.
В прототипе применяется тройное дублирование магистральных каналов информационного обмена основных сигналов, связанных с обеспечением безопасности режимов ведения высокоскоростного поезда (спутниковой навигационной системы, АЛС-ЕН и др.), а также содержатся долговременные запоминающие устройства параметров ведения поезда и систем диагностики.
При работе бортового информационно-управляющего комплекса используются данные от трех информационно-управляющих систем (двух систем головного вагона и одной системы хвостового вагона). При этом используется мажоритарный режим. Если данные, полученные от двух из трех информационно-управляющих систем, совпадают, то они считаются достоверными. Если данные, полученные от третьей информационно-управляющей системы, отличаются на величину более установленного порога или не совпадают, то они игнорируются, а информация об этом фиксируется в долговременном запоминающем устройстве. Если количество сбоев, зафиксированных за определенное время, превышает установленный порог, то фиксируется отказ информационно-управляющей системы. В эту систему выдается соответствующее сообщение, производится ее отключение и замещение на четвертую информационно-управляющую систему, находящуюся в горячем резерве. При отказе двух информационно-управляющих систем дальнейшая работа производится в усеченном режиме. В этом случае из двух оставшихся работоспособных систем ведущей назначается та, у которой в карточке зафиксировано меньшее количество сбоев.
Система позволяет производить предрейсовую и рейсовую диагностику и тестирование бортовых комплексов и устройств с фиксацией результатов в долговременном запоминающем устройстве, а также выводом на экран панели управления и индикации в кабине машиниста.
Недостатком прототипа, как и аналогов, является недостаточная надежность и достоверность передачи информационных сообщений в системах, обладающих избыточностью оборудования и каналов информационного обмена, ограниченностью наращивания функциональных возможностей, отсутствием универсальности для применения на тяговом и маневровом подвижном составе, неопределенностью отказоустойчивости, сложностью технического обслуживания, ремонта и оперативного ввода данных о режимах ведения поезда.
Задача - повышение надежности и достоверности передачи информационных сообщений.
Технический результат достигается способом передачи информационных сообщений в микропроцессорных системах управления и диагностики, который заключается в том, что информационные сообщения в бортовых системах управления и диагностики подвижного состава с использованием CAN-интерфейса передают непрерывно и одновременно по трем или двум линиям связи тремя сообщениями в каждой линии через блок центрального вычислителя БЦВ. БЦВ производит вычисление значения каждого из трех сообщений, передаваемых в цифровом коде первым, вторым и третьим каналами или первым и вторым каналами (в зависимости от требований надежности к передаче информационных сообщений) индивидуально для каждого контролируемого параметра системы управления и диагностики. БЦВ сравнивает вычисленные значения каждого из информационных сообщений, передаваемых по трем или двум линиям связи, определяет два параметра из команд первого и второго сообщения и два параметра из второго и третьего сообщения, а затем производит вычисление среднего значения наиболее близких параметров в двух или более сообщениях, которые в меньшей степени отличаются между собой, определяет его как достоверное и передает в исполнительные системы. При этом в каждой линии связи поочередно проводятся полные циклы обмена со всеми устройствами системы для каждого из каналов.
Отличие и преимущества предлагаемого изобретения заключаются в том, что повышается надежность универсальной системы передачи данных с использованием CAN-интерфейса между бортовыми системами управления и диагностики за счет непрерывной передачи информационных сообщений и одновременно по трем или двум линиям связи тремя сообщениями в каждой через блок центрального вычислителя БЦВ в соответствии с алгоритмом, осуществляемым программным обеспечением.
Способ поясняется на примере передачи информационных сообщений в микропроцессорной системе управления и диагностики МПСУиД подвижного состава и представленной схемой организации обмена информацией.
Составные части МПСУиД размещаются в каждой секции тягового подвижного состава, в каждом вагоне мотор-вагонного подвижного состава (электропоезда, дизельпоезда), по своему составу зависят от типа, серии тягового подвижного и мотор-вагонного подвижного состава, а также типа вагона, обеспечивают работу и взаимодействие оборудования внутри и между секциями электровозов, тепловозов и вагонов мотор-вагонного подвижного состава по линиям связи.
МПСУиД включает в себя подсистемы с программным обеспечением:
- управления локомотивом (МСУЛ-А);
- аналоговых измерений (подсистема СИ);
- автоведения (подсистема А);
- диагностики (подсистема Д).
МПСУиД обеспечивает:
- автоматизированное управление работой оборудования в тяговом и тормозном режиме «Ручное регулирование» и «Авторегулирование» с учетом профиля пути, разрешенной скорости движения, показаний светофоров, сигналов, получаемых от датчиков аппаратов;
- контроль состояния оборудования, агрегатов и аппаратов;
- диагностику оборудования, агрегатов и аппаратов.
В режиме «Ручное регулирование» управление осуществляется по командам, получаемым от машиниста через приборы с унифицированного пульта управления ПУ-ЭЛ. Режим «Авторегулирование» обеспечивается автоматизированной микропроцессорной системой управления локомотивом МСУЛ-А при получении соответствующей команды с унифицированного пульта управления электровозом ПУ-ЭЛ.
МСУЛ-А позволяет, изменяя количество блоков, использовать ее функции на различных типах тягового и мотор-вагонного подвижного состава и обеспечивает:
- разгон до заданной скорости с возможностью последующего автоматического поддержания скорости в диапазонах, определяемых тяговыми характеристиками подвижного состава;
- плавное изменение силы тяги и торможения в режиме автоматического управления;
- электрическое торможение до заданной скорости с возможностью последующего автоматического поддержания скорости (на спусках), определяемых тормозными характеристиками подвижного состава;
- защиту от буксования и юза;
- регулирование частоты вращения вентиляторов в зависимости от протекающих токов в цепях тяговых электродвигателей;
- ограничение тока возбуждения и в якорях тяговых электродвигателей;
- контроль протекающих процессов при управлении электровозом с отображением результатов на мониторе ПУ-ЭЛ и выдачей голосовой информации;
- запись в энергонезависимую память параметров функционирования для последующей автоматизированной расшифровки действий машиниста в управлении, состояния оборудования и МПСУиД.
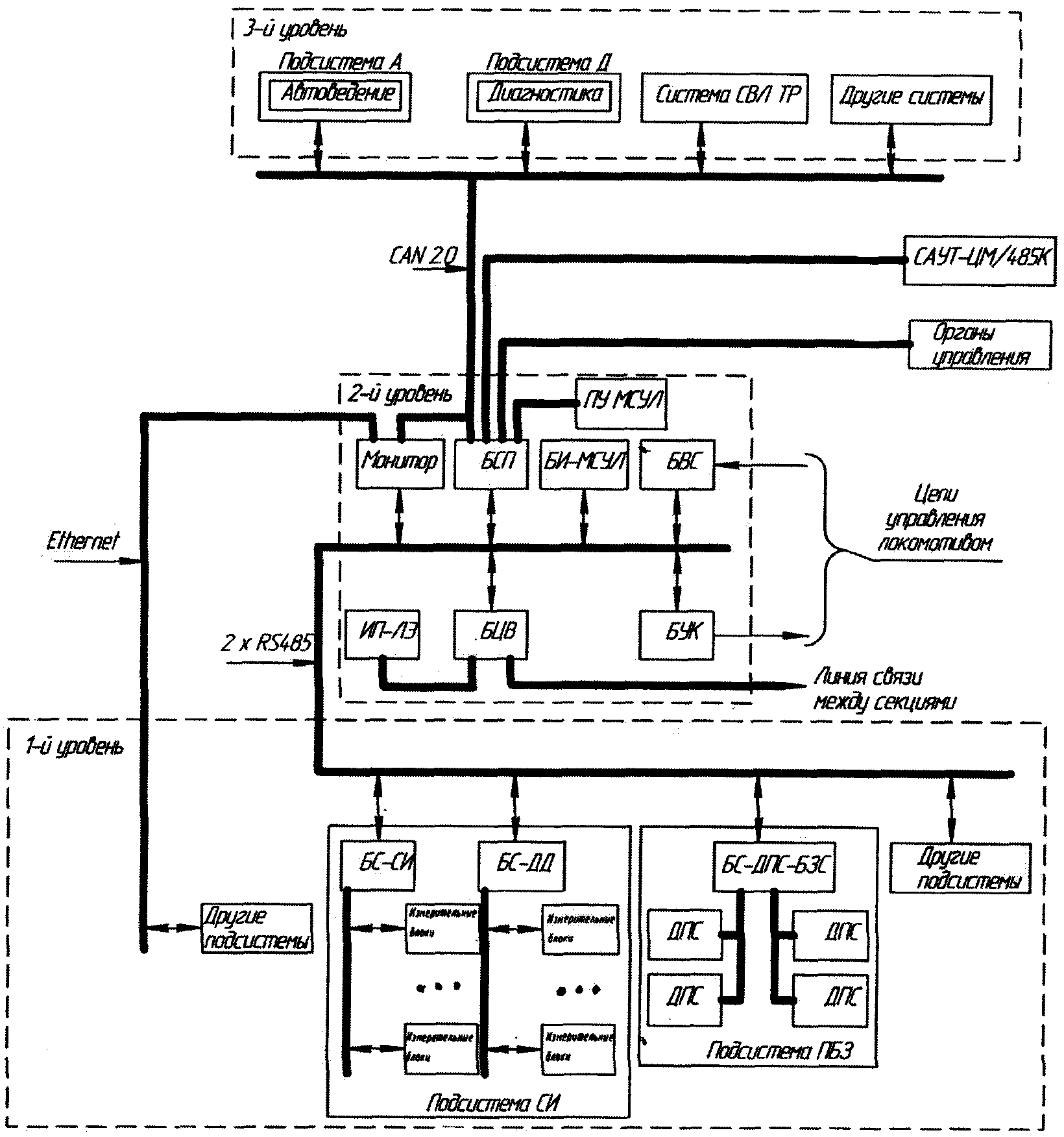
Устройства, входящие в систему МПСУиД и взаимодействующие с ней, а также принципы организации обмена информацией между ними представлены на рисунке, где:
- БСП (+пульт МСУЛ) - блок связи с пультом;
- БУК - блок управления контакторами;
- БВС - блок входных сигналов;
- БЦВ - блок центрального вычислителя;
- ИП-ЛЭ - блок питания;
- БС-СИ - блок связи со средствами измерения;
- БС-ДД - блок связи с датчиками давления жатого воздуха;
- БС-ПС - блок связи с датчиками контроля пути;
- БЗС-ДПС - блок связи с противобоксовочной системой;
- ПУ-ЭЛ - пульт управления;
- Монитор - цветной монитор на унифицированном пульте управления ПУ-ЭЛ для отображения информации машинисту.
Каналы обмена информацией в системе МПСУиД.
Для связи систем 2-го и 3-го уровней использован интерфейс CAN 2.0. В обмене используются макрокоманды доступа к управлению оборудованием и отдельными элементами (например, контакторами и элементами авторегулирования).
Для обеспечения установленного техническими условиями уровня надежности связи (не более 6 случаев отказа на 1 млн км пробега) в МПСУиД используются интерфейсы:
- в подсистемах СИ, ПСН, ПБЗ-RS485;
- в подсистеме СВЛ TP - CAN2.0;
- в подсистемах А и Д - нет внутреннего интерфейса.
Для связи в системе 2-го уровня и обмена информацией с подсистемами 1-го уровня используется сдвоенный (с резервированием) интерфейс RS485. В каждой линии связи присутствует информация от трех каналов МСУЛ-А. Каждая подсистема подключается к интерфейсу не более чем одним приемопередатчиком для каждой линии.
МСУЛ-А обеспечивает прием информации от подсистем 3-го уровня, органов управления, подсистемы СИ и ПБЗ, цепей управления электровоза, выбирает управляющее воздействие на аппараты и подсистему авторегулирования.
В процессе работы МСУЛ-А производит самодиагностику и непосредственно связанных с ними цепей, блоков и аппаратов, а также производит запись в энергонезависимую память данных о функционировании системы 2-го уровня.
Необходимый набор входных дискретных и аналоговых сигналов определяется типом и серией подвижного состава в пределах функций МСУЛ-А.
Система МПСУиД (с подсистемой МСУЛ-А) отличается от других систем автоматического управления тем, что обмен данными в системе МСУЛ-А осуществляется непрерывно и одновременно по двум линиям связи.
Наиболее ответственные блоки - блок центрального вычислителя БЦВ и блок связи с пультом БСП - трехканальные и обмениваются цифровой информацией в соответствии с алгоритмом, осуществляемым программным обеспечением, по двум линиям связи тремя сообщениями для каждого из трех каналов. Остальные - блок управления контакторами БУК, блок входных сигналов БВС и другие блоки подсистемы МСУЛ-А - двухканальные. Двухканальные блоки имеют подключение каждого из каналов к своей линии связи МСУЛ-А и отвечают по этой линии на запросы от любого из трех каналов блока центрального вычислителя БЦВ. Другие, одноканальные блоки подключаются к одной линии связи МСУЛ-А и также отвечают на запросы любого из трех каналов БЦВ.
Для практической реализации способа в микропроцессорных системах управления и диагностики МПСУиД, включающих подсистемы управления локомотивом МСУЛ-А, аналоговых измерений СИ, автоведения А и диагностики Д с программным обеспечением, применяется стандартный CAN-интерфейс, через который непрерывно передаются информационные сообщения одновременно по трем или двум линиям связи тремя сообщениями в каждой линии через блок центрального вычислителя БЦВ.
Блок центрального вычислителя БЦВ производит вычисление значения каждого из трех сообщений, передаваемых в цифровом коде первым, вторым, третьим каналами или первым и вторым каналами (в зависимости от требований надежности к передаче информационных сообщений), индивидуально для каждого контролируемого параметра системы управления и диагностики. БЦВ сравнивает вычисленные значения каждого из информационных сообщений, передаваемых по трем или двум линиям связи, определяет два параметра из команд 1-го и 2-го сообщения и два параметра из 2-го и 3-го сообщения. После этого производит вычисление среднего значения, наиболее близких параметров в двух или более сообщениях, которые в меньшей степени отличаются между собой, определяет его как достоверное и передает в исполнительные системы.
Если из трех наборов сообщений данных две пары имеют одинаковое значение, например для чисел X, Y, Z - это две пары (X, Y) и (Y, Z), то достоверным значением параметра принимается Y.
В каждой из трех или двух линий передачи сообщений поочередно проводятся полные циклы обмена данными со всеми устройствами системы по каждому из каналов.
Обработка команд выполняется сравнением последних команд, принятых с активных каналов, и последующим вычислением, сравнением и выбором достоверных значений параметров.
Канал считается неактивным, если при обработке сообщений по нему не поступило информационное сообщение, предусмотренное программным обеспечением, либо произошла задержка установленного времени более 500 мс с момента ее принятия. При расчетах такой канал исключается из системы вычислений и сравнения значений информационных сообщений.
В случае определения недостоверной информации дальнейшие действия системы управления и диагностики регламентируются алгоритмом программного обеспечения, индивидуально для каждого блока и параметра, при этом фиксируется отказ с регистрацией в энергонезависимой памяти.
Значение аналоговых параметров при наличии двух активных каналов вычисляется как среднее арифметическое, которое принимается за достоверное значение параметра. При наличии одного активного канала обработка не производится и фиксируется отсутствие достоверной информации по всем принимаемым параметрам.
Применение предлагаемого способа обеспечит нормируемые значения показателей надежности и позволит повысить безопасность и эффективность железнодорожных перевозок за счет универсальности системы обмена информационными сообщениями в микропроцессорных системах управления и диагностики подвижного состава, а также способности наращивания функциональных возможностей.
Способ передачи информационных сообщений в микропроцессорных системах управления и диагностики, заключающийся в том, что информационные сообщения в бортовых системах управления и диагностики подвижного состава с использованием CAN-интерфейса передают непрерывно и одновременно по трем или двум линиям связи тремя сообщениями в каждой линии через блок центрального вычислителя БЦВ, который производит вычисление значения каждого из трех сообщений, передаваемых в цифровом коде первым, вторым и третьим каналами или первым и вторым каналами, индивидуально для каждого контролируемого параметра системы управления и диагностики, после чего сравнивает вычисленные значения каждого из информационных сообщений, передаваемых по трем или двум линиям связи, определяет два параметра из команд первого и второго сообщения и два параметра из второго и третьего сообщения, а затем производит вычисление среднего значения наиболее близких параметров, в двух или более сообщениях, которые в меньшей степени отличаются между собой, определяет его как достоверное и передает в исполнительные системы, при этом в каждой линии связи поочередно проводятся полные циклы обмена со всеми устройствами системы для каждого из каналов.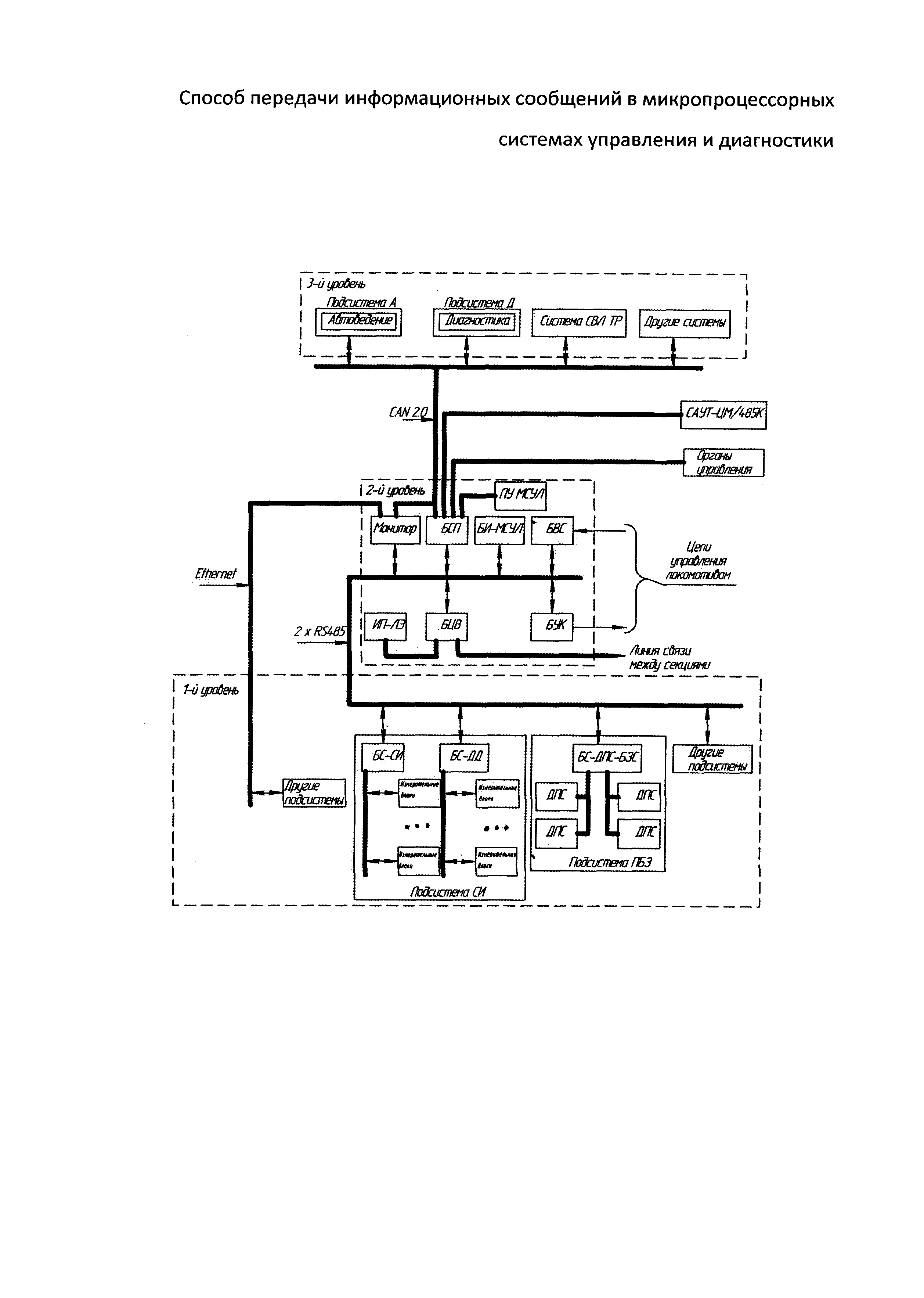
Система видеонаблюдения и оповещения пассажиров на электропоезде
Способ путевой навигации и измерения скорости локомотива по геометрии железнодорожного пути
Способ путевой навигации и обзора передней полусферы локомотива по геометрии железнодорожного пути
Нелинейная радиолокационная система для автоматического управления тормозами локомотива
Комплекс информационного обеспечения системы автоматического управления торможением поезда
Ультразвуковой расходомер
Датчик угла поворота

