Результат интеллектуальной деятельности: СИСТЕМА КОРРЕКЦИИ ОШИБОК ИНС ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДОРОЖНОЙ КАРТЕ МЕСТНОСТИ
Вид РИД
Изобретение
Изобретение относится к радиотехнике, точнее к радионавигации и может быть использовано для полета и наведения летательных аппаратов (ЛА) посредством сопоставления реальных данных дистанционного зондирования подстилающей поверхности с дорожной картой местности и предназначено для применения на борту пилотируемых и беспилотных самолетов, крылатых ракет и т.д. с использованием автономного источника информации, например, радиовысотомера (РВ) или другого радиолокатора, например, РЛС обзора передней полусферы, для осуществления коррекции измерений инерциальной навигационной системы (ИНС).
Общей проблемой применения систем инерциальной навигации является специфика ее работы, которая приводит к появлению и накоплению ошибок в определении положения ЛА, которые с течением времени могут стать неприемлемо большими, поэтому результирующая траектория полета будет значительно отличаться от заданной или запланированной траектории полета в отсутствии коррекции.
Изобретение относится к классу корреляционно-экстремальных навигационных систем (КЭНС), предназначенных для коррекции информационных данных бортовой ИНС путем сравнения (сопоставления) обнаруженных радиоконтрастных [1] ориентиров (т.е. отличающихся по уровню и/или статистическим характеристикам при вертикальном или наклонном зондировании) с эталонной дорожной картой местности, полученной заранее (аэрофотосъемка, спутниковая, геодезическая и пр.).
Широко известны спутниковые системы навигации, которые в большинстве случаев дают высокую точность определения координат и других навигационных параметров для коррекции траектории полета ЛА. Недостаток в том, что они не являются автономными, а значит, не обеспечивают достаточную устойчивость коррекции траектории ЛА в условиях естественных и/или искусственных помех.
Также широко известны оптические системы, в том числе астрокоррекции траектории полета, как ручные (на стратегических бомбардировщиках и на кораблях) так и автоматические (на баллистических ракетах), например, оптическая корреляционная система [2]. Недостаток таких систем, в том, что они не работают в условиях плохой видимости (за исключением баллистических ракет).
Наиболее эффективным известным средством коррекции накопленных ошибок является использование датчиков геофизических полей [3], обеспечивающих сбор информации в процессе полета ЛА. При этом применяется корреляционно-экстремальный подход, который основан на сравнении полученных измерений поля с априорной (эталонной) информацией о нем, хранящейся в памяти бортового вычислителя.
Информативными геофизическими полями могут выступать, магнитные, гравитационные поля, рельеф, оптическая, радиотепловая или радиолокационная яркость.
Теорией корреляционно-экстремальных навигационных систем начали заниматься еще в конце 60-ых - начале 70-ых годов, да и сам этот термин впервые ввел академик РАН А.А. Красовский, [4]. Теория навигации по геофизическим полям в РФ хорошо обоснована в [1], [3] и [5], а у зарубежных авторов в [6].
Практическое применение коррекции ошибок ИНС в ЛА разработано несколько позднее. Например, коррекция ошибок отклонения реальной траектории полета от заданной в настоящее время проводится следующими системами:
- Инфракрасная корреляционная система [7]
- Пассивный радиометрический коррелятор [8]
- Кадровая корреляционно-экстремальная навигационная система [9]
- Навигационная система по магнитному полю Земли [10]
- Система определения местоположения низко летящих самолетов по профилю впереди лежащей местности [11]
- Беспоисковая система навигации по рельефу местности [12]
Известна «Активная корреляционная система», разработанная фирмой Goodyear Aerospace для решения задач навигации и наведения, названная ROC (Range-Only Correlation), в основу которой положен принцип корреляции вдоль линии [13].
Система определяет положение движущегося объекта по времени отраженных радиолокационных импульсов, формируемых по четырем симметричным направлениям и по вертикали. В процессоре быстродействующий коррелятор решает задачу определения координат ЛА путем сравнения обработанных отраженных импульсов с соответствующими данными эталонных карт. Полученная информация поступает в ИНС для коррекции навигационной системы. Облучаемый участок составляет 5×10 км. Недостаток: применение специальной РЛС с вычислителем большой мощности и памяти.
Известна «Комбинированная система навигации по рельефу местности» фирмы Мс Donnell-Douglas (США) для крылатой ракеты «Томагавк» (TERCOM - Terrain Contour Matching) [14], в которой система измеряет вертикальный профиль рельефа местности вдоль истинной траектории полета с помощью РВ (для измерения геометрической высоты полета) и баровысотомера (для получения абсолютной высоты полета). Вычитая некоторую высоту, измеренную РВ, из барометрической, система определяет профиль вдоль траектории полета и организует поиск в памяти вычислителя наиболее «похожего», заранее занесенного профили в дорожную карту.
При нахождении в системе наиболее близкого профиля определяется истинное положение ЛА, и эта информация используется для коррекции траектории. Недостатки: сложный алгоритм работы, требуется большой объем памяти и высокое быстродействие ЦП, т.к. обзор местности ведется вперед/назад, затем поперек пути полета, а это 30×30 м вдоль и 240×240 м поперек). Коррекция системы по скорости и угловому положению не проводится.
Усовершенствованный алгоритм КЭНС по полю рельефа был реализован в системе SITAN (Sandia inertial navigation system) [12, 15]. В первом случае вместо коррелятора используется фильтр Калмана, который обрабатывает навигационные данные поля рельефа с последующим формированием гипотез о местоположении ЛА.
Недостатки: также необходима сложная обработка информации, кроме того необходим тщательный выбор коэффициентов фильтра Калмана для каждого типа рельефа.
Следующий шаг по пути использования эмпирических данных рельефа местности получен в системе VATAN [16], вместо фильтра Калмана в ней используется алгоритм Витерби, который работает быстрее, чем алгоритм в системах SITAN и TERCOM за счет применения быстрых алгоритмов типа Монте-Карло и Витерби. Плюсом также является более полное использование эмпирических данных. Недостаток: все еще является весьма сложным алгоритмом, кроме того все системы навигации по рельефу не работают с участками мелорельефной поверхности.
Таким образом, решение задачи навигации и точность ее решения зависят от типа используемого геофизического поля. Поэтому на практике ни одна из известных систем КЭНС не позволяет полностью решить задачу навигации во всем диапазоне возможных условий применения для различных геофизических полей.
Наиболее близким техническим решением является применение для коррекции ИНС радиовысотомера фирмы Honeywell (США) AN/APN - 197, предназначенного для измерения (в совокупности с сигналами вертикального акселерометра и барометрического высотомера) поля рельефа на борту крылатой ракеты «Томагавк». Характеристики РВ приведены в [17]. Недостатки: применение такой системы для сверхзвуковых крылатых ракет (например, типа «Калибр», РФ) проблематично, т.к. потребуется значительно большие вычислительные мощности, объем памяти и увеличение массогабаритных характеристик для получения приемлемых точностных характеристик.
Наиболее перспективным направлением авторам представляется использование поля радиоконтраста, основанного на сравнении цифровой дорожной карты ориентиров местности полета с данными дистанционного зондирования, наблюдаемыми радиолокационными датчиками в реальном масштабе времени. При малорельефной поверхности поле радиоконтраста сохраняет информативность по причине наличия инфраструктурных объектов (автодорожная и ж/д сеть, мосты, трубопроводы и пр.), а также природные ориентиры (реки, границы озер, поля, леса и т.д.).
Технической задачей изобретения является повышение точности навигации ЛА, в том числе и главное в условиях малорельефной подстилающей поверхности.
Технический результат достигается за счет:
- облучения РЛС подстилающей поверхности и приема отраженных сигналов по продольной оси траектории полета;
- вычисления гистограммы и корреляционного выбора типа поверхности (смена типа поверхности соответствует ориентирам дорожной карты местности);
- уточнения положения границ ориентиров и формирования портрета (массива значений типов поверхности вдоль траектории полета или в заданной площади сканирования) реальных данных дистанционного зондирования подстилающей поверхности;
- сопоставления этого портрета с дорожной картой (эталоном);
- корректировки показаний ИНС по результатам корреляционного сопоставления портретов.
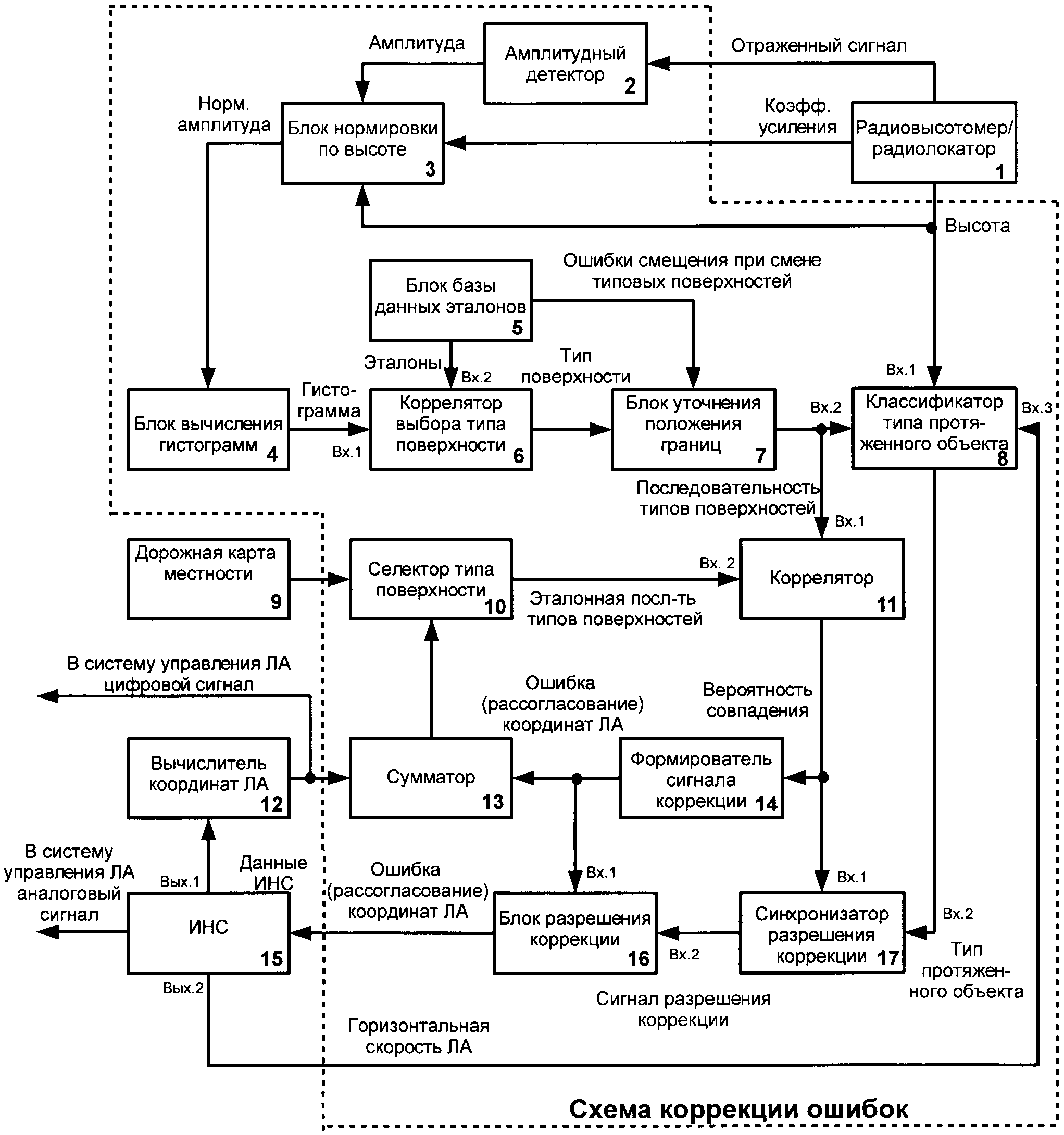
Для решения поставленной задачи предлагается система коррекции ошибок навигации летательного аппарата по дорожной карте местности, содержащая инерциальную систему с вычислителем координат ЛА, радиовысотомер/радиолокатор, дорожную карту местности и схему коррекции ошибок, характеризующаяся тем, что схема коррекции ошибок содержит следующие узлы и блоки: амплитудный детектор, блок нормировки по высоте, блок вычисления гистограмм, блок базы данных эталонов, коррелятор выбора типа поверхности, блок уточнения положения границ, классификатор типа протяженного объекта, селектор типа поверхности, коррелятор, сумматор, формирователь сигналов коррекции, блок разрешения коррекции, синхронизатор разрешения коррекции со следующими соединениями: радиовысотомер/радиолокатор 1 принятым отраженным сигналом соединен через амплитудный детектор 2 с первым входом блока нормировки по высоте 3, сигналом коэффициент усиления соединен со вторым входом блока нормировки по высоте 3, а сигналом высота с третьим входом блока нормировки по высоте 3 и с первым входом классификатора типа протяженного объекта 8; выход блока нормировки по высоте 3 через блок вычисления гистограмм 4 соединен с первым входом коррелятора выбора типа поверхности 6, на второй вход которого подается сигнал с первого выхода блока базы данных эталонов 5, выход коррелятора выбора типа поверхности 6 и второй выход блока базы данных эталонов 5 подаются на блок уточнения положения границ 7, выход которого подается на второй вход классификатора типа протяженного объекта 8 и первым входом коррелятора 11, вероятностный выход которого соединен с первый вход синхронизатора разрешения коррекции 17, со вторым входом которого соединен классификатор типа протяженного объекта 8; первый выход данных ИНС 15 через вычислитель координат 12 соединен с первым входом сумматора 13; сигнал с выхода формирователя сигнала коррекции 14 подается на сумматор 13 и первый вход блока разрешения коррекции 16, на второй вход которого подается сигнал с синхронизатора разрешения коррекции 17, а выход блока разрешения коррекции 16 соединен с входом ИНС 15, которая в свою очередь вторым выходом сигнала горизонтальной скорости ЛА соединена с третьим входом классификатора типа протяженного объекта 8; выходы сумматора 13 и дорожной карты местности 9 подаются на входы селектора типа поверхности 10, выход которого соединен со вторым входом коррелятора 11; выход вычислителя координат ЛА 12 также выдается в систему управления ЛА.
На фиг. приведена структурная схема системы коррекции ошибок ИНС летательного аппарата по дорожной карте местности, на которой показаны:
1) радиовысотомер (РВ) или другой радиолокатор;
2) амплитудный детектор (АД);
3) блок нормировки по высоте;
4) блок вычисления гистограмм;
5) блок базы данных эталонов;
6) коррелятор выбора типа поверхности;
7) блок уточнения положения границ;
8) классификатор типа протяженного объекта;
9) дорожная карта местности;
10) селектор типа поверхности;
11) коррелятор;
12) вычислитель координат ЛА;
13) сумматор;
14) формирователь сигналов коррекции;
15) инерциальная навигационная система (ИНС);
16) блок разрешения коррекции;
17) синхронизатор разрешения коррекции.
Система коррекции траектории ЛА по дорожной карте местности работает следующим образом.
С радиовысотомера или радиолокатора (зондирование под углом к надиру) отраженный сигнал поступает в амплитудный детектор, который вычисляет значение амплитуды сигнала в реальном времени. Далее, используя информацию о высоте и коэффициенте усиления из РВ, значение амплитуды нормируется к высоте полета в блоке нормировки по высоте. В процессе полета информация об амплитуде накапливается и по накопленным значениям амплитуды формируется гистограмма амплитуды отраженного сигнала. Далее гистограмма нормируется к единичной площади. После формирования первой гистограммы она в реальном времени вычисляется непрерывно по мере прихода информации об амплитуде.
Из блока базы данных эталонов гистограммы эталонов поступают в коррелятор типа подстилающей поверхности. Здесь происходит сравнение текущей гистограммы и эталонной, вычисляется площадь пересечения гистограмм. Если ни один тип поверхности не обеспечил превышение минимального порога, на выходе выдается ноль. На выходе коррелятора типа подстилающей поверхности - тип поверхности (численный идентификатор). В случае смены типа подстилающей поверхности информация о подстилающей поверхности поступает на вход блока уточнения положения границ. В этот блок поступает также информация об ошибках смещения (определены в блоке базы данных эталонов для каждого сочетания типовых подстилающих поверхностей) для устранения ошибки смещения. Информация с выхода поступает в классификатор типа протяженного объекта, который определяет, что за объект был пересечен «граница» или «полоса» в зависимости от ширины протяженного объекта и было ли вообще движение ЛА (по данным о скорости ЛА с ИНС). Ширина протяженного объекта оценивается по времени между отсчетами и информации о скорости, полученной с ИНС. Также эта информация поступает на вход коррелятора, который сравнивает имеющуюся последовательность типов подстилающих поверхностей с последовательностью, полученной из селектора типа подстилающей поверхности.
Информация с ИНС поступает в вычислитель координат ЛА, который реализован в составе бортового вычислителя. С выхода вычислителя информация поступает в сумматор. С сумматора информация поступает в селектор типа подстилающей поверхности, который формирует последовательность типов подстилающей поверхности для текущей гипотезы о траектории (положении) ЛА, с учетом информации обо всех предыдущих значениях типа подстилающей поверхности, накопленных в процессе полета.
Коррелятор сравнивает текущую последовательность типов подстилающих поверхностей с полученной из селектора типа подстилающей поверхности. С выхода коррелятора значение вероятности совпадения поступает на формирователь сигналов коррекции, который вычисляет ошибку координат для последовательности типов подстилающих поверхностей, уточняет положение текущей последовательности, путем формирования гипотез о положении (смещении координат) ЛА. Далее ошибка по координатам поступает на сумматор, который смещает положение последовательности типовых подстилающих поверхностей для проверки следующей гипотезы. Синхронизатор разрешения коррекции, в случае превышения порога для значения вероятности совпадения, выдает сигнал разрешения коррекции, в результате чего значение ошибки рассогласования координат ЛА (уточненной в результате приведенной выше проверке гипотез) передается в ИНС. В случае малого значения вероятности совпадения используется второй входной сигнал синхронизатора с классификатора, который изменяет значение порога по результатам оценки ширины протяженных объектов в классификаторе протяженных объектов.
Уточненные в результате работы схемы коррекции ошибок, значения координат выдаются в систему управления ЛА [3].
Система коррекции траектории ЛА может быть реализована на вычислителе, например 1879 ВМЗ. Типовой радиовысотомер А-078 может быть использован в системе коррекции.
Система радиовысотомера А-078 обеспечивает динамическую перестройку значений мощности принимаемого сигнала в пределах 135 дБ, что соответствует изменению высоты в 2371 раз (уровень сигнала меняется пропорционально 1/R4), например, от 5 м до 11 тыс. м. Для сохранения информации о высоте достаточно использовать 12-разрядную АЦП.
Введем следующие обозначения:
С - операция сравнения;
Р - операция умножения;
А - операция сложения;
S - операция выбора.
Оценка требуемого быстродействия (для скорости ЛА 300 м/с, частоте поступления информации об амплитуде 300 отсч./сек, дальности полета 300 км, плотности ориентиров 40 шт/100 км, полной записи типов поверхности 10 км для селектора типа подстилающей поверхности и 1 км для блока уточнения положения границ, а в сокращенном виде (протяженность-тип поверхности) для всего полета) показал, что самым требовательным по ресурсам блоком является селектор типа подстилающей поверхности (106 (S+A) операций и 1 Мбайт памяти), далее идет блок уточнения положения границ (101 Кбайт памяти и порядка 105 (S+2A) операций) корреляторы (200 байт памяти и 104 (2S+4A)+100Р операций, и 7⋅104 (P+C+A)+C+6A+70S) операций и (10,5+1) Кбайт памяти соответственно), а также блок построения гистограмм (1 Кбайт памяти и 340 (7С+1А)+7А+7Р операций). Остальные блоки требуют малого объема ресурсов. Таким образом, без учета накладных расходов потребуется менее 2⋅106 (S+A)+105 Р операций и 2 Мбайт памяти. Поскольку половину времени процессор занят внутренними задачами, то с учетом накладных расходов (около 300% дополнительно) необходимо обеспечить быстродействие 16 млн.оп/сек. С учетом оптимизации, распараллеливания и снижения накладных расходов можно снизить требуемый ресурс вчетверо и более. Но даже без учета оптимизации современные быстродействующие сигнальные процессоры, например 1879 ВМ3 способны обеспечить требуемый ресурс.
Таким образом, построение системы по предлагаемой схеме позволяет обеспечить высокую точность коррекции координат полета ЛА в условиях малорельефного ландшафта, и, в итоге, повысить точность навигации за счет использования расширенного списка навигационных ориентиров.
В итоге: данная система соответствует основному экономическому закону: «стоимость-эффективность».
Список использованных источников
1. Кондратенков, Г.И. Радиовидение. Радиолокационные системы дистанционного зондирования Земли / Г.И. Кондратенков, А.Ю. Фролов. - М.: Радиотехника, 2005. - 368 с.
2. Патент RU 2584368. Способ определения контрольных значений пространственно-угловой ориентации самолета на трассах и приаэродромных зонах при летных испытаниях пилотажно-навигационного оборудования для его осуществления. Дата приоритета: 13.02.2015.
3. Белоглазов, И.Н. Основы навигации по геофизическим полям. / И.Н. Белоглазов, Г.И. Джанджгава, Г.П. Чигин. - М.: Наука. Главная редакция физико-математической литературы, 1985. - 328 с.
4. Красовский А.А., Белоглазов И.Н., Чигин Г.П. Теория корреляционно экстремальных систем, М., Наука, 1979.
5. Белоглазов, И.Н. Корреляционно-экстремальные системы / И.Н. Белоглазов, В.П. Тарасенко. - М.: Сов. радио, 1974. - 392 с.
6. Skolnik, М.I. Radar Handbook / М.I. Skolnik, Third Edition. The McGraw-Hill Companies, 2008. - 1351 p.
7. Патент RU 2525601. Комплексная корреляционно-экстремальная навигационная система. Дата приоритета: 18.02.2013
8. Патент RU 2593149. Адаптивный способ пассивной радиолокации. Дата приоритета: 29.07.2015
9. Патент RU 2406071. Способ навигации движущихся объектов. Дата приоритета: 14.07.2009
10. Патент RU 2635820. Способ коррекции бесплатформенной инерциальной навигационной системы. Дата приоритета: 11.05.2016
11. Патент RU 2273590. Комплексная система посадки летательных аппаратов и способ захода на посадку. Дата приоритета: 16.11.2004
12. Баклицкий, В.К. Корреляционно-экстремальные методы навигации и наведения / В.К. Баклицкий. - Тверь: ТО «Книжный клуб», 2009. - 360 с.
13. Reed C.G., Hogan J.J. Range correlation for cruise missiles.  v. 3.
v. 3.
14. Patent US 7522090 B2. Systems and methods for a terrain contour matching navigation system. Дата приоритета: 21.04.2009
15. Patent US 4829304 A. Map-aided navigation system employing TERCOM-SITAN signal processing. Дата приоритета: 20.05.1989
16. Enns, R., Morrell, D., "Terrain-Aided Navigation Using the Viterbi Algorithm", AIAA, Journal of Guidance, Control, and Dynamics, Vol. 18, No. 6, November-December 1995.
17. Klass Ph. J. New guidance technique being tested. - Aviation Week and Space Technology, 1974, v. 100, No. 8.
Система коррекции ошибок ИНС летательного аппарата по дорожной карте местности, содержащая инерциальную систему (ИНС) с вычислителем координат летательного аппарата (ЛА), радиовысотомер/радиолокатор, дорожную карту местности и схему коррекции ошибок, характеризующаяся тем, что схема коррекции ошибок содержит следующие узлы и блоки: амплитудный детектор, блок нормировки по высоте, блок вычисления гистограмм, блок базы данных эталонов, коррелятор выбора типа поверхности, блок уточнения положения границ, классификатор типа протяженного объекта, селектор типа поверхности, коррелятор, сумматор, формирователь сигналов коррекции, блок разрешения коррекции, синхронизатор разрешения коррекции со следующими соединениями: радиовысотомер/радиолокатор принятым отраженным сигналом соединен через амплитудный детектор с первым входом блока нормировки по высоте, сигналом коэффициент усиления соединен со вторым входом блока нормировки по высоте, а сигналом высота - с третьим входом блока нормировки по высоте и с первым входом классификатора типа протяженного объекта; выход блока нормировки по высоте через блок вычисления гистограмм соединен с первым входом коррелятора выбора типа поверхности, на второй вход которого подается сигнал с первого выхода блока базы данных эталонов, выход коррелятора выбора типа поверхности и второй выход блока базы данных эталонов подаются на блок уточнения положения границ, выход которого подается на второй вход классификатора типа протяженного объекта и первый вход коррелятора, вероятностный выход которого соединен с первым входом синхронизатора разрешения коррекции, со вторым входом которого соединен классификатор типа протяженного объекта; первый выход данных ИНС через вычислитель координат соединен с первым входом сумматора; сигнал с выхода формирователя сигнала коррекции подается на сумматор и первый вход блока разрешения коррекции, на второй вход которого подается сигнал с синхронизатора разрешения коррекции, а выход блока разрешения коррекции соединен с входом ИНС, которая в свою очередь вторым выходом сигнала горизонтальной скорости ЛА соединена с третьим входом классификатора типа протяженного объекта; выходы сумматора и дорожной карты местности подаются на входы селектора типа поверхности, выход которого соединен со вторым входом коррелятора; выход вычислителя координат ЛА также выдается в систему управления ЛА.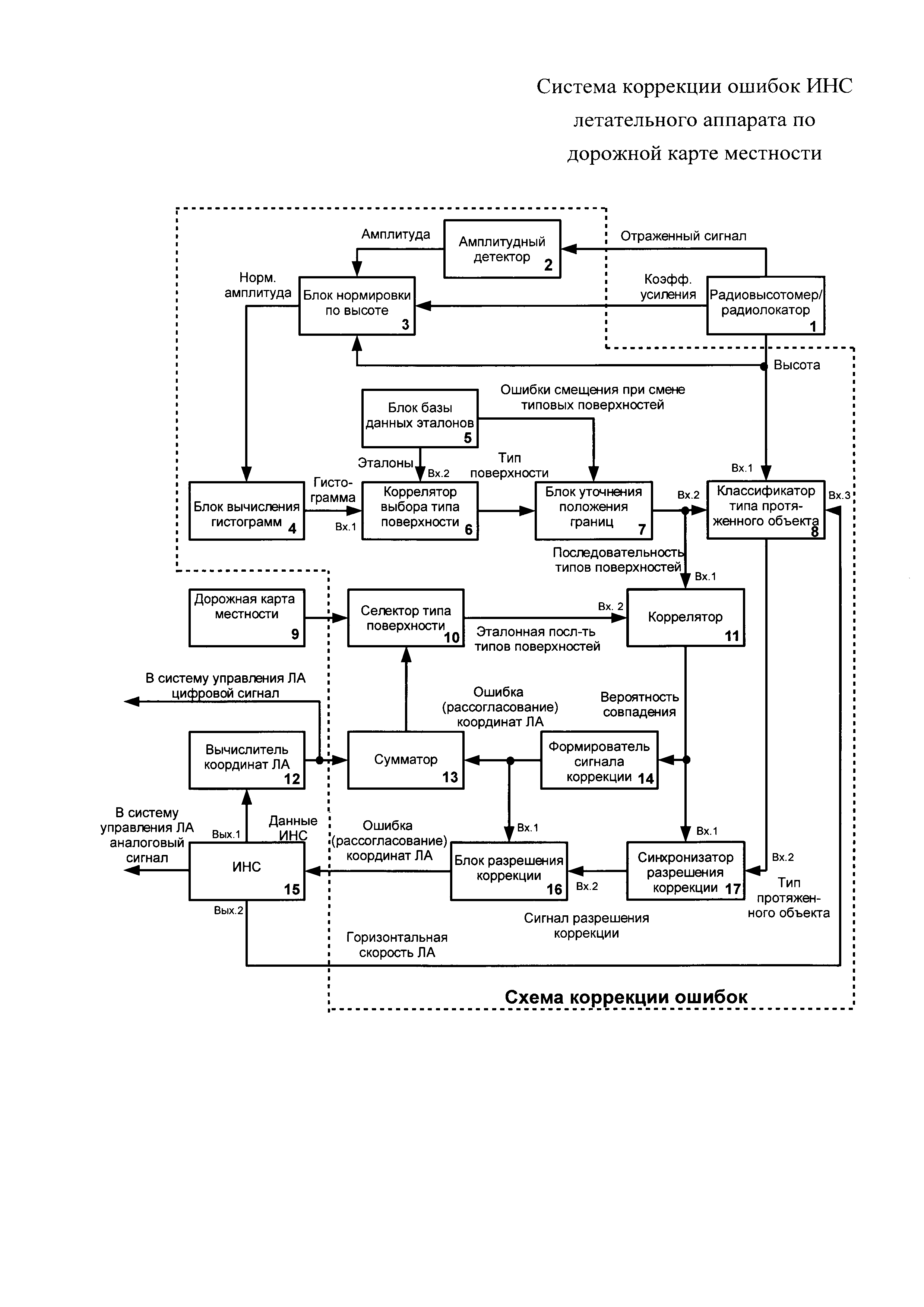
Быстровозводимое каркасное здание
Способ получения концентрата скандия из скандийсодержащего раствора
Литая латунь
Навигационная система зондирования атмосферы
Порошковая проволока для нанесения покрытий, стойких к абразивному износу и высокотемпературной коррозии
Способ неразрушающего контроля термодеформационной обработки полуфабрикатов из двухфазных титановых сплавов на перегрев методом рентгеноструктурного анализа
Способ количественного определения триазавирина методом вольтамперометрии (варианты)
Когерентный супергетеродинный спектрометр электронного парамагнитного резонанса
Способ определения статического давления в некалиброванной камере высокого давления
Способ определения антиоксидантной активности с использованием метода электронно-парамагнитной резонансной спектроскопии
Имитатор ложной радиолокационной цели при зондировании сигналами с линейной частотной модуляцией
Имитатор радиолокационной цели при зондировании преимущественно длительными сигналами
Имитатор радиолокационной цели при зондировании преимущественно длительными сигналами
Устройство для имитации ложной радиолокационной цели при зондировании сигналами с линейной частотной модуляцией
Имитатор радиолокационной цели

