Результат интеллектуальной деятельности: Линейный реверсивный вибродвигатель
Вид РИД
Изобретение
Изобретение относится к области электротехники и автоматики и может быть использовано как исполнительный элемент для прецизионных перемещений в оптико-механических приборах, в технологическом оборудовании для микроэлектроники, в системах автоматического наведения, в механических сканирующих устройствах и пьезоприводах.
Известен линейный пьезодвигатель, содержащий неподвижный корпус, ведомый элемент в подшипниковых опорах неподвижного корпуса, пьезоэлементы с рычагами прямого и обратного хода, источник питания пьезоэлементов, дополнительно внутри неподвижного корпуса коаксиально размещен подвижный корпус, который соединен с неподвижным корпусом упругими элементами, на подвижном корпусе жестко закреплены два пьезоэлемента с рычагами прямого хода ведомого элемента и два пьезоэлемента с рычагами обратного хода ведомого элемента, пьезоэлементы с рычагами одного и того же направления перемещения расположены оппозитно вокруг ведомого элемента, при этом источник питания пьезоэлементов имеет один выход для питания пьезоэлементов прямого хода и один выход для питания пьезоэлементов обратного хода, причем один из пьезоэлементов с рычагами для каждого из направлений перемещения ведомого элемента подключен к источнику питания через фазовращатель [Патент РФ №2617209 Линейный пьезоэлектрический двигатель / С.В. Пономарев, С.В. Рикконен, А.В. Азии, С.А. Орлов]. Недостаток конструкции заключается в том, что для организации реверсивной работы линейного пьезодвигателя используются по два, встречно расположенных пьезоэлемента, имеется подвижный корпус, дополнительные упругости - это увеличивает массогабаритные характеристики и усложняет управление устройства.
Известен двухкоординатный пьезоэлектрический двигатель [Авторское свидетельство СССР №548912 Двухкоординатный пьезоэлектрический двигатель / Т.В. Гурбанов, Г.Ф Тюленев, Э.М. Юсуф-заде, С.Г. Гардашев], содержащий основание, в которое установлены в направляющих пазах два рабочих органа, пьезоэлементы, закрепленные одними концами в основание. А другими концами прижаты к рабочим органам, причем рабочие органы установлены параллельно друг другу, при этом один из этих органов выполнен из двух частей, образующих клиновую пару, а пьезоэлементы установлены попарно симметрично по обе стороны пары рабочих органов. Недостаток данной конструкции заключается в том, что для организации реверсивной работы используются два, встречно расположенных пьезоэлемента, это увеличивает массогабаритные характеристики и усложняет управление устройства.
Известен вращательный пьезоэлектрический двигатель, содержащий неподвижный корпус, ротор с валом в подшипниковых опорах неподвижного корпуса, два пьезоэлемента с толкателями прямого и обратного хода, дополнительно внутри неподвижного корпуса коаксиально размещен подвижный корпус, который соединен с неподвижным корпусом упругими элементами, на подвижном корпусе жестко закреплены два пьезоэлемента с толкателями для прямого вращения ротора и два пьезоэлемента с толкателями для обратного вращения ротора, причем пьезоэлементы с толкателями с одним направлением вращения размещены диаметрально противоположно, при этом источник питания пьезоэлементов с толкателями имеет один выходной канал для прямого вращения ротора и один выходной канал для обратного вращения ротора, причем один из пьезоэлементов с толкателем для обоих направлений вращения подключен через фазовращатель источника питания [Патент РФ №2621712 Вращательный пьезоэлектрический двигатель / С.В. Пономарев, С.В. Рикконен, А.В. Азии, С.А. Орлов]. Недостаток конструкции заключается в том, что для организации реверсивной работы используются по два, встречно расположенных пьезоэлемента, имеется подвижный корпус, дополнительные упругости - это увеличивает массогабаритные характеристики и усложняет управление устройства.
Наиболее близким (прототип) к заявляемому устройству является линейный вибродвигатель [Авторское свидетельство СССР №710087 Линейный вибродвигатель / А.И. Трофимов, В.В. Евмененко]. Линейный вибродвигатель, содержащий ротор, вибратор, выполненный на основе пьезоэлектрической пластины, один конец которой упирается через демпфирующую прокладку в держатель, закрепленный на корпусе вибродвигателя, а другой конец пластины через конический стержень жестко упирается в насадку в виде полого цилиндра с боковым сквозным пазом.
Основным недостатком конструкции прототипа заключается в отсутствии реверсивной работы устройства.
Выше перечисленный недостаток исключает предложенная конструкция линейного реверсивного вибродвигателя.
Технический результат, достигаемый при осуществлении предлагаемого изобретения, состоит в возможности обратного хода.
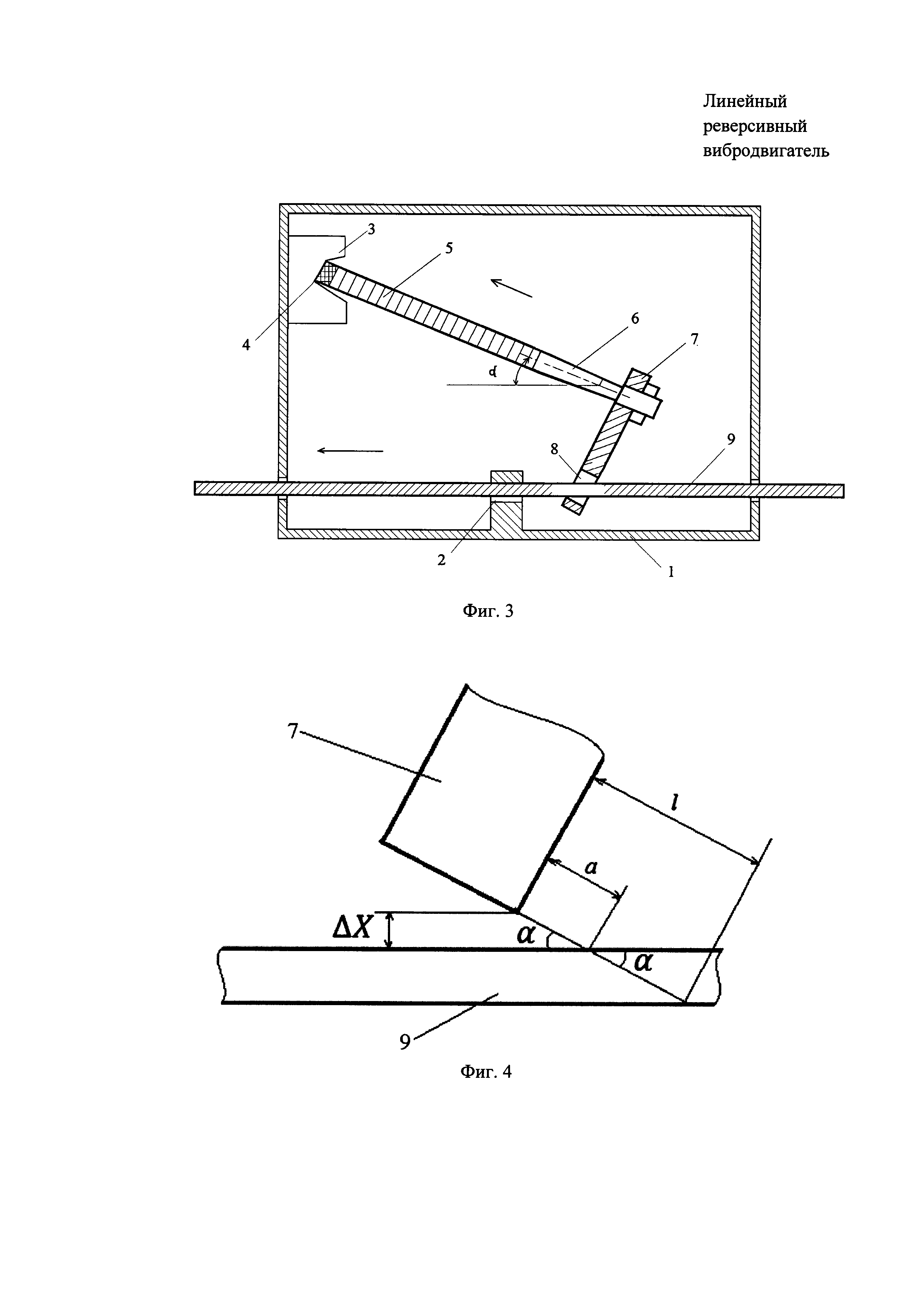
Технический результат достигается тем, что линейный реверсивный вибродвигатель, содержит ведомый элемент, вибратор, выполненный на основе пьезоэлемента, один конец которого упирается через демпфирующую прокладку в держатель, закрепленный на корпусе вибродвигателя, а другой конец пьезоэлемента через стержень жестко упирается в насадку, контактирующую с ведомым элементом, которая представляет собой реверсивный контактный захват, выполненный в виде пластины с охватывающим ведомый элемент отверстием, причем реверсивный контактный захват касается ведомого элемента верхней или нижней кромкой отверстия, при этом реверсивный контактный захват одним концом жестко закреплен на стержне, а через охватывающее отверстие пропущен ведомый элемент, причем величина перемещения ведомого элемента определяется из соотношения:
X=(l-а)⋅cosα,
где a=ΔХ/sin α - ход реверсивного контактного захвата до контакта с поверхностью ведомого элемента, X - величина перемещения ведомого элемента, l - величина хода пьезоэлемента, ΔХ - величина зазора между ведомым элементом и реверсивным контактным захватом, α - угол между осями симметрии ведомого элемента и пьезоэлемента.
Сущность изобретения поясняется чертежами.
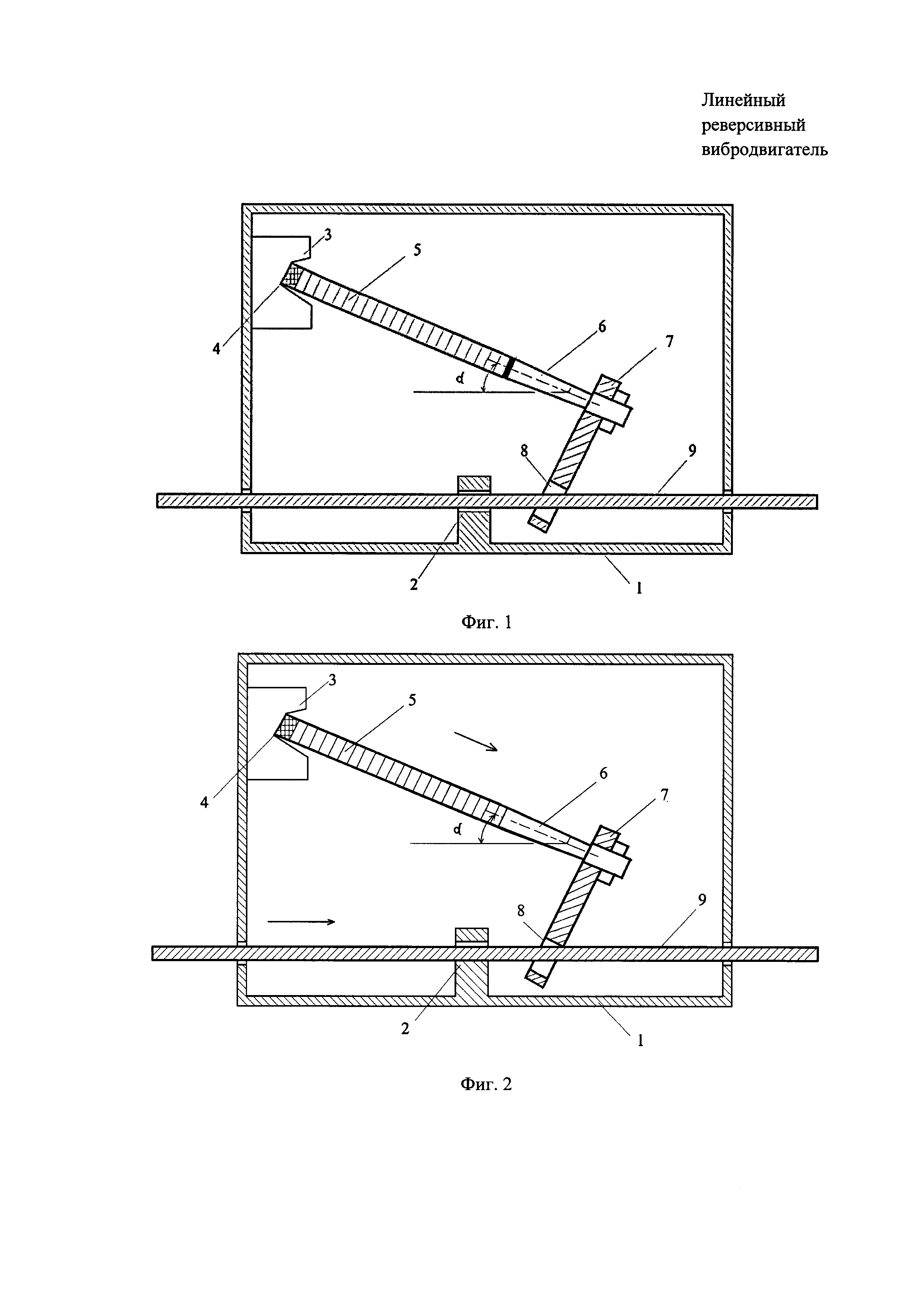
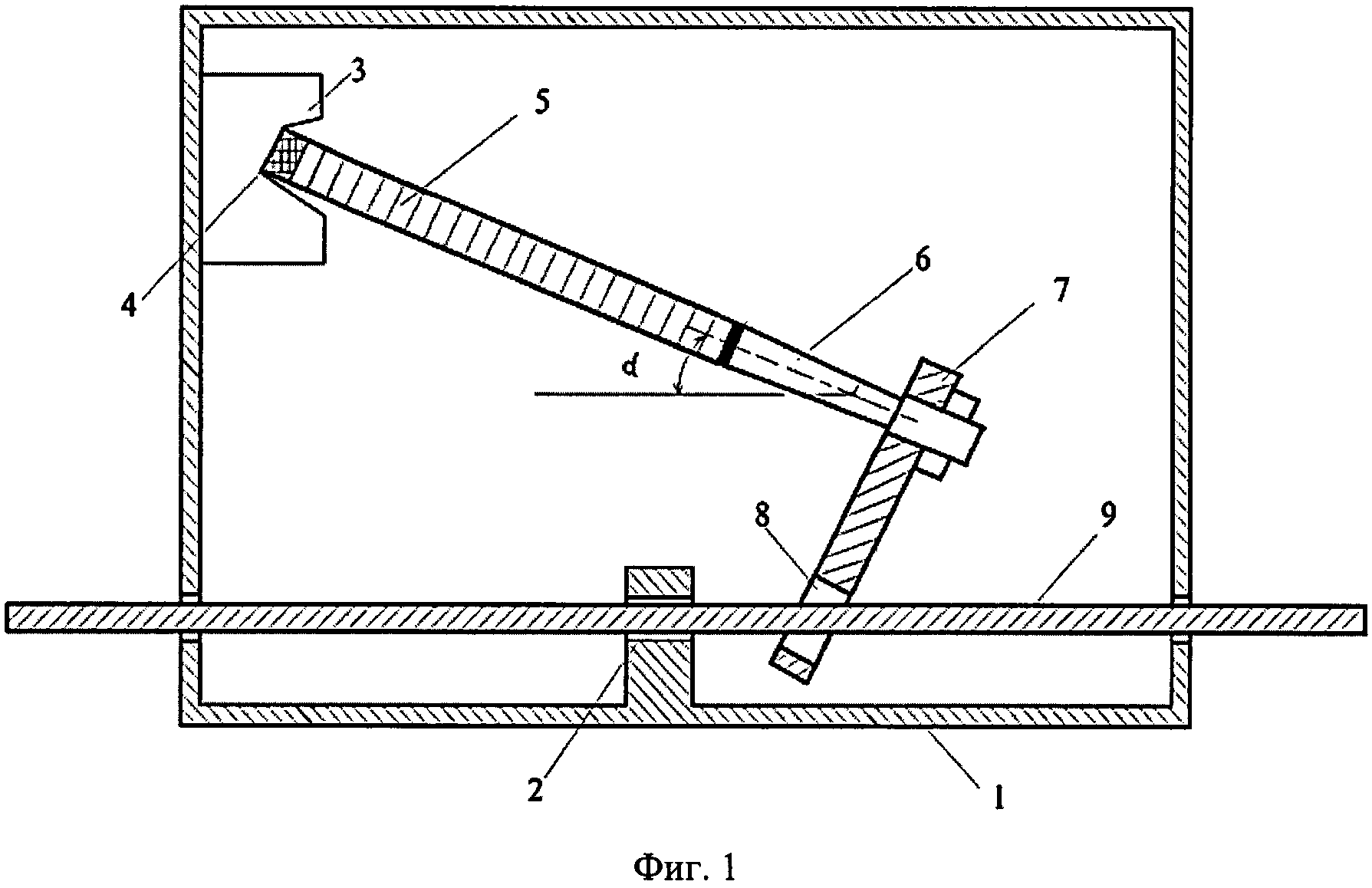
Фиг. 1 - Схема линейного реверсивного вибродвигателя при отсутствии управляющего сигнала на пьезоэлементе.
Линейный реверсивный вибродвигатель состоит из корпуса 1, на котором закреплен подшипник скольжения 2 и держатель 3, в держателе через демпфирующую прокладку 4 закреплен пьезоэлемент 5, к которому на другом конце прикреплен стержень 6. На конце стержня 6 жестко закреплен специальный реверсивный контактный захват 7 в виде пластины с захватывающим отверстием 8, которое, при расширении и сжатии пьезоэлемента 5, захватывает ведомый элемент 9 и перемещает его в сторону смещений пьезоэлемента 5. Конструкция пьезоэлемента 5, стержня 6 и реверсивного контактного захвата 7 расположена под углом а к корпусу 1.
Пьезоэлемент 5 устройства расположен под углом α к ведомому элементу. Величина перемещения ведомого элемента 9 зависит от величины угла α, от хода пьезоэлемента 5 и от величины зазора между ведомым элементом 9 и реверсивным контактным захватом 7.
Фиг. 2 - Схема линейного реверсивного вибродвигателя при подаче на пьезоэлемент положительного управляющего сигнала.
Фиг. 3 - Схема линейного реверсивного вибродвигателя при подаче на пьезоэлемент отрицательного управляющего сигнала.
Фиг. 4 - Схема определения величины перемещения ведомого элемента.
Для примера расчета величины перемещения ведомого элемента 9 за один ход пьезоэлемента возьмем пьезоэлемент АПМ-2-22. Ход этого пьезоэлемента при подаче напряжения 100 В составляет l=40⋅10-6 м. Величина зазора между ведомым элементом 9 и реверсивным контактным захватом 7 составляет ΔХ=10⋅10-6 м. Угол между осями ведомого элемента 9 и пьезоэлемента составляет α=30°.

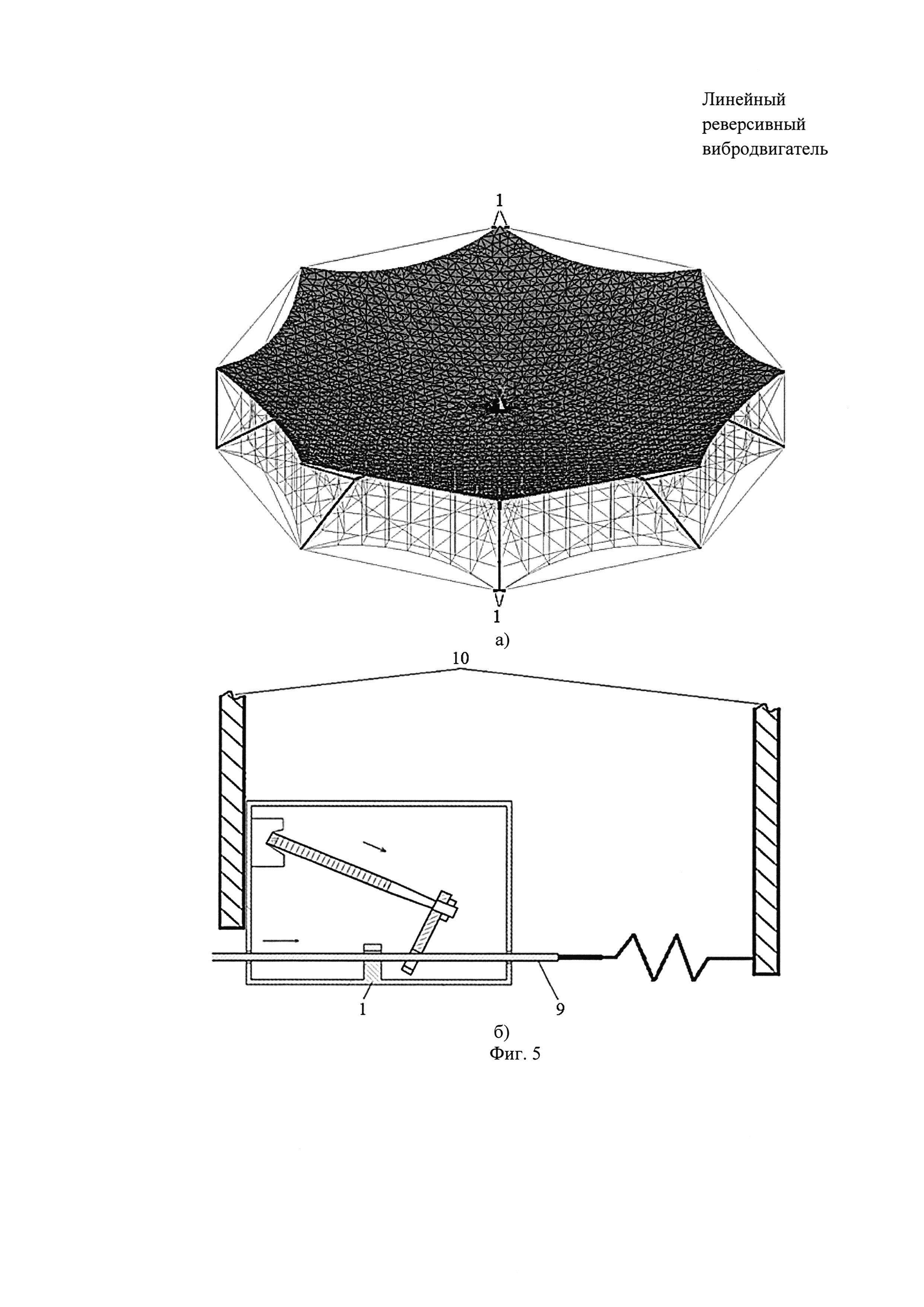
Фиг. 5 - Пример практической реализации линейного реверсивного вибродвигателя.
Линейный реверсивный вибродвигатель такой конструкции (габариты 50×50×100 мм, масса 150 гр, мощность 3 Вт, частота входного напряжения 100 Гц) можно использовать в качестве устройства для натяжения шнуров рефлектора 1 (УНПШ). Данное устройство крепится на спице рефлектора 10 (Фиг. 5а), шнур рефлектора фиксируется на ведомом элементе 9 вибродвигателя. При необходимости шнур можно натягивать или ослаблять при формировании силового каркаса рефлектора для улучшения его отражающей способности. На (Фиг. 5б) приведена схема работы УНПШ.
Линейный реверсивный вибродвигатель работает следующим образом.
При подаче положительного напряжения на электроды пьезоэлемента 5, пьезоэлемент 5 удлиняется, через стержень 6 с реверсивным контактным захватом 7 перемещается по наклонной траектории к ведомому элементу 9, при этом захватывающее отверстие 8 реверсивного контактного захвата 7 захватывает ведомый элемент 9 верхним правым ребром и перемещает ведомый элемент 9 в направлении перемещения пьезоэлемента 5.
При снятии управляющего сигнала пьезоэлемент 5 сокращается, реверсивный контактный захват 7, освобождая через захватывающее отверстие 8 ведомый элемент 9, возвращается в исходное состояние, Фиг. 2. При повторной подаче управляющего положительного напряжения на пьезоэлемент 5 механический процесс движения ведомого элемента 9 повторяется. В этом случае происходит пошаговое движение ведомого элемента 9 в сторону увеличения длины пьезоэлемента 5.
Обратный ход линейного реверсивного вибродвигателя.
При подачи отрицательного напряжения на электроды пьезоэлемента 5, пьезоэлемент 5 укорачивается и, через стержень 6 с реверсивным контактным захватом 7 перемещается по наклонной траектории к ведомому элементу 9, при этом реверсивный контактный захват 7 захватывающим отверстием 8 захватывает ведомый элемент 9 нижним левым ребром, и перемещает ведомый элемент 9 в направлении перемещения пьезоэлемента 5.
При снятии управляющего сигнала пьезоэлемент 5 увеличивает свою длину, реверсивный контактный захват 7 захватывающим отверстием 8 освобождает ведомый элемент 9, система возвращается в исходное состояние, Фиг. 3. При повторной подачи управляющего отрицательного напряжения на пьезоэлемент 5 механический процесс движения ведомого элемента 9 повторяется. В этом случае происходит пошаговое движение ведомого элемента 9 в сторону уменьшения длины пьезоэлемента 5.
Из приведенного примера реализации следует, что достигается положительный эффект изобретения - возможность обратного хода.
ЛИТЕРАТУРА
1. Пат. 2617209 РФ, Линейный пьезоэлектрический двигатель / Пономарев Сергей Васильевич, Рикконен Сергей Владимирович, Азии Антон Владимирович, Орлов Сергей Александрович.
2. А.с. 548912 СССР Двухкоординатный пьезоэлектрический двигатель / Т.В. Гурбанов, Г.Ф Тюленев, Э.М. Юсуф-заде, С.Г. Гардашев.
3. Пат. 2621712 РФ, Вращательный пьезоэлектрический двигатель / Пономарев Сергей Васильевич, Рикконен Сергей Владимирович, Азии Антон Владимирович, Орлов Сергей Александрович.
4. А.с. 710087 СССР Линейный вибродвигатель / А.И. Трофимов, В.В. Евмененко.
Способ определения коэффициента сопротивления сферической частицы при вдуве газа с ее поверхности
Способ исследования осаждения сферического облака полидисперсных твердых частиц в вязкой жидкости
Установка для исследования динамики разрушения сферического макрообъема жидкости при свободном падении в воздухе
Абсорбционно-десорбционное устройство циркуляционного типа для сепарации гелия из природного газа
Способ электронно-лучевой сварки кольцевого соединения тонкостенной обечайки с цилиндрической крышкой, выполненных из высокопрочных алюминиевых сплавов
Устройство для определения скорости испарения капли
Способ литья в кокиль для получения плоских отливок из алюминиевых и магниевых сплавов
Способ определения скорости испарения группы капель
Линейный шаговый пьезоэлектрический двигатель
Способ испытаний на высокоинтенсивные ударные воздействия приборов и оборудования
Способ испытаний на высокоинтенсивные ударные воздействия приборов и оборудования

