Результат интеллектуальной деятельности: МАНИПУЛЯТОР ДЛЯ ПЕРЕМЕЩЕНИЯ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН
Вид РИД
Изобретение
Изобретение относится к области робототехники и, в частности, к манипуляторам для перемещения полупроводниковых пластин.
Известен манипулятор для перемещения полупроводниковых пластин, содержащий основание с установленным на нем подшипниковым узлом с коаксиально расположенными в корпусе внутренним валом и внешним валом, содержащий также привод, состоящий из первого двигателя, первый ротор которого соединен с внутренним валом, а первый статор соединен с внешним валом, состоящий также из второго двигателя, второй ротор которого соединен с внешним валом, а второй статор соединен с основанием, содержащий также руку, состоящую из плеча, включающего плечевой корпус, плечевой выходной шкив, связанный с плечевым входным шкивом плечевым замкнутым ремнем, состоящую также из локтя, локтевой корпус которого через жестко связанный с ним выходной локтевой вал и подшипник соединен с локтевым выходным шкивом, который, в свою очередь, связан локтевым замкнутым ремнем с локтевым входным шкивом, жестко связанным через локтевой входной вал с плечевым корпусом и имеющим диаметр в два раза меньше, чем диаметр локтевого выходного шкива, состоящую также из кисти, кистевой корпус которой жестко связан с локтевым выходным шкивом, и на концах которой расположено не менее одного держателя пластин (патент US №5046992, опубл. 10.09.1991). Это устройство выбрано в качестве прототипа предложенного решения.
Недостаток этого устройства состоит в низкой точности позиционирования руки манипулятора, связанной с переносом погрешностей зубчато-ременной передачи от валов двигателей до держателя пластин.
Задача изобретения заключается в создании прецизионного манипулятора для транспортировки полупроводниковых пластин в производстве изделий электронной техники.
Технический результат изобретения заключается в повышении точности позиционирования руки манипулятора.
Указанный технический результат достигается тем, что в манипуляторе для перемещения полупроводниковых пластин, содержащем основание с установленным на нем подшипниковым узлом с коаксиально расположенными в корпусе внутренним валом и внешним валом, содержащий также привод, состоящий из первого двигателя, первый ротор которого соединен с внутренним валом, а первый статор соединен с внешним валом, состоящий также из второго двигателя, второй ротор которого соединен с внешним валом, а второй статор соединен с основанием, содержащий также руку, состоящую из плеча, включающего плечевой корпус, плечевой выходной шкив, связанный с плечевым входным шкивом плечевым замкнутым ремнем, состоящую также из локтя, локтевой корпус которого через жестко связанный с ним выходной локтевой вал и подшипник соединен с локтевым выходным шкивом, который, в свою очередь, связан локтевым замкнутым ремнем с локтевым входным шкивом, закрепленным через локтевой входной вал на плечевом корпусе и имеющим диаметр в два раза меньше, чем диаметр локтевого выходного шкива, состоящую также из кисти, кистевой корпус которой закреплен на локтевом выходном шкиве, и на концах которой расположено не менее одного держателя пластин, плечевой корпус жестко соединен с внешним валом, а плечевой входной шкив зафиксирован на внутреннем вале, на выходе плеча на плечевом корпусе установлен первый редуктор, полый быстроходный входной вал которого жестко связан с плечевым выходным шкивом, и редукторный выходной фланец которого жестко связан с локтевым корпусом, причем диаметр плечевого входного шкива не больше диаметра плечевого выходного шкива.
Существует вариант, в котором внутренний вал выполнен полым.
Существует также вариант, в котором локтевой выходной вал выполнен полым.
Существует также вариант, в котором первый ротор выполнен полым.
Существует также вариант, в котором второй двигатель оснащен вторым редуктором.
Существует также вариант, в котором второй ротор выполнен полым.
Существует также вариант, в котором первый двигатель и второй двигатель оснащены соответственно первым фиксирующим ротор устройством и вторым фиксирующим ротор устройством.
Существуют также варианты, в которых в качестве первого редуктора используют компактный циклоидальный подшипниковый редуктор с полым сквозным быстроходным входным валом, и в качестве второго редуктора используют компактный циклоидальный подшипниковый редуктор с полым сквозным быстрым входным валом.
Существует также вариант, в котором в качестве плечевого замкнутого ремня и локтевого замкнутого ремня используют зубчатые ремни из неопрена с кордом из стекловолокна и нейлоновым покрытием зубьев, а в качестве плечевого входного шкива, плечевого выходного шкива, локтевого выходного шкива и локтевого входного шкива используют зубчатые шкивы из дюралюминия.
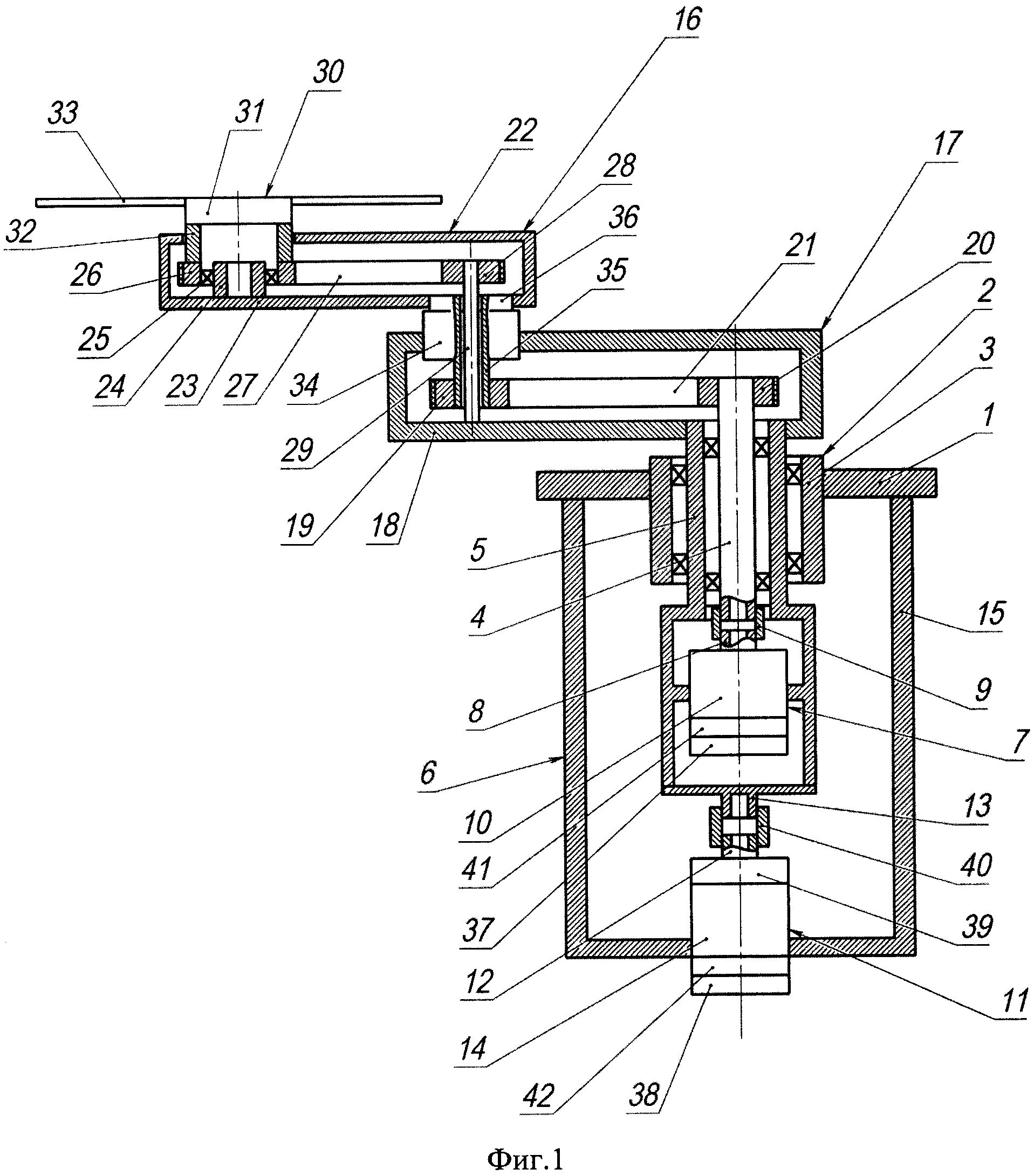
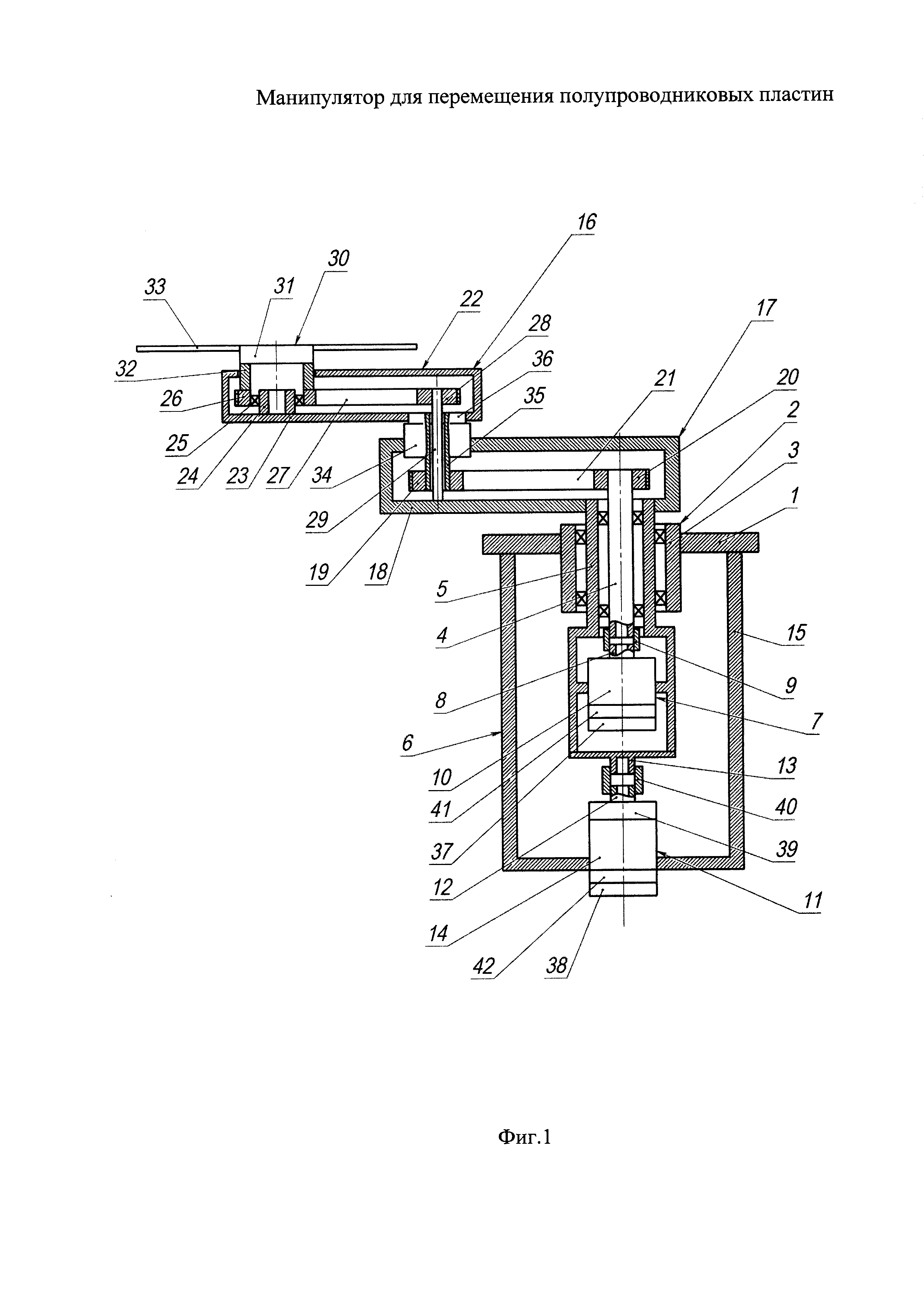
На фиг. 1 изображена компоновочная схема манипулятора для перемещения полупроводниковых пластин в разрезе, вид сбоку.
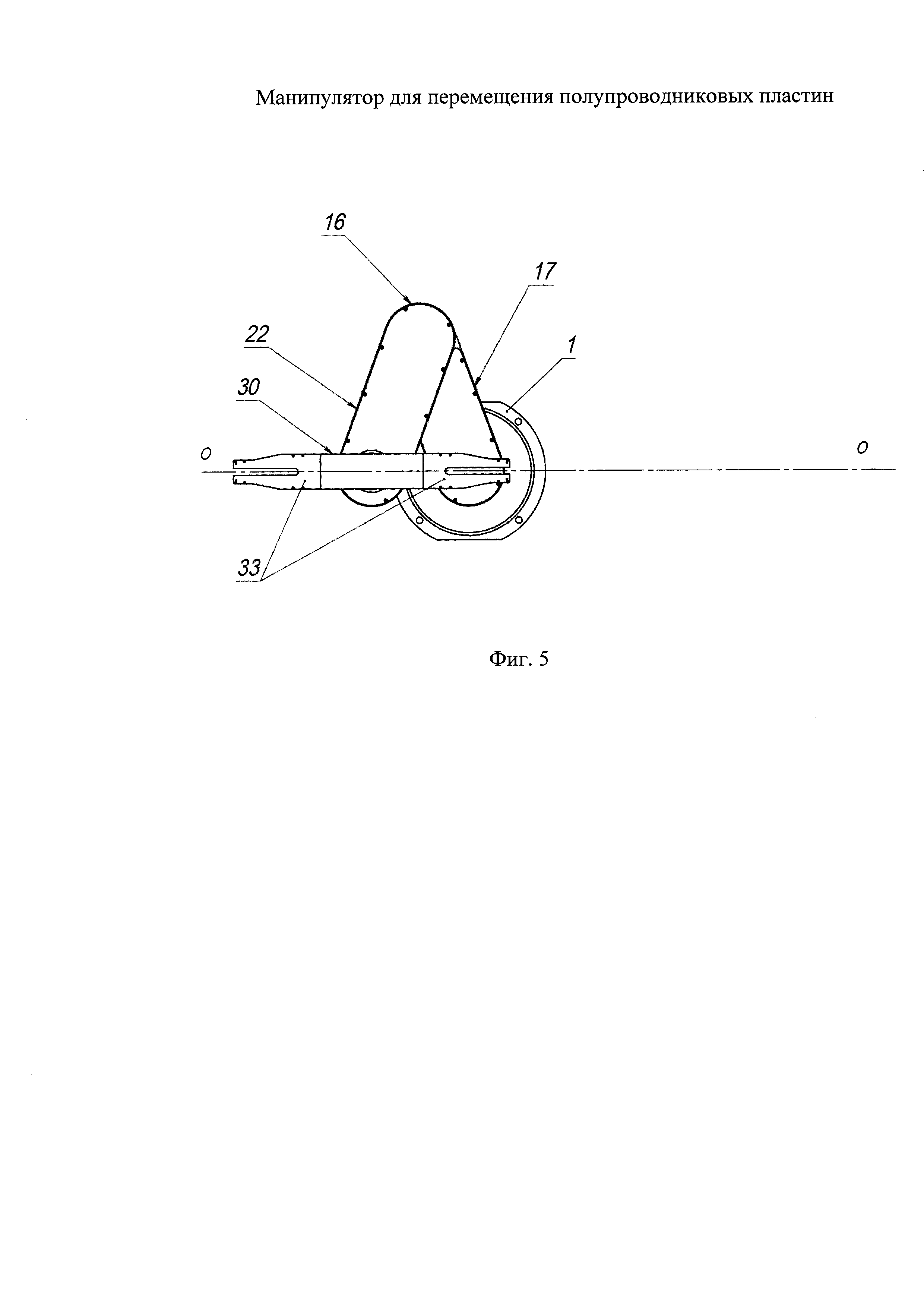
На фиг. 2 изображена модель манипулятора для перемещения полупроводниковых пластин в изометрии.
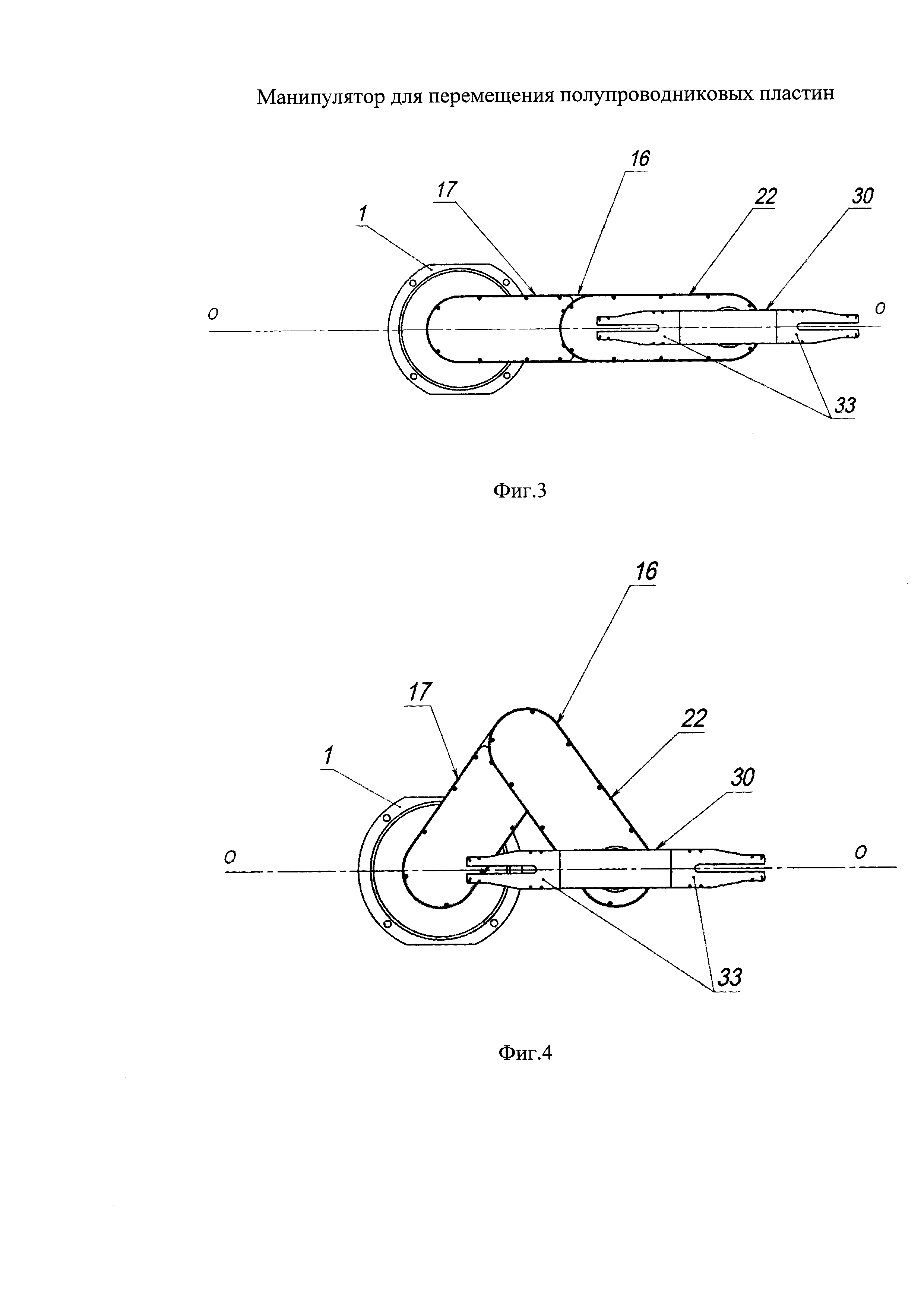
На фиг. 3 изображена модель манипулятора для перемещения полупроводниковых пластин в сложенном состоянии, вид сверху.
На фиг. 4 изображена модель манипулятора для перемещения полупроводниковых пластин в полусложенном состоянии, вид сверху.
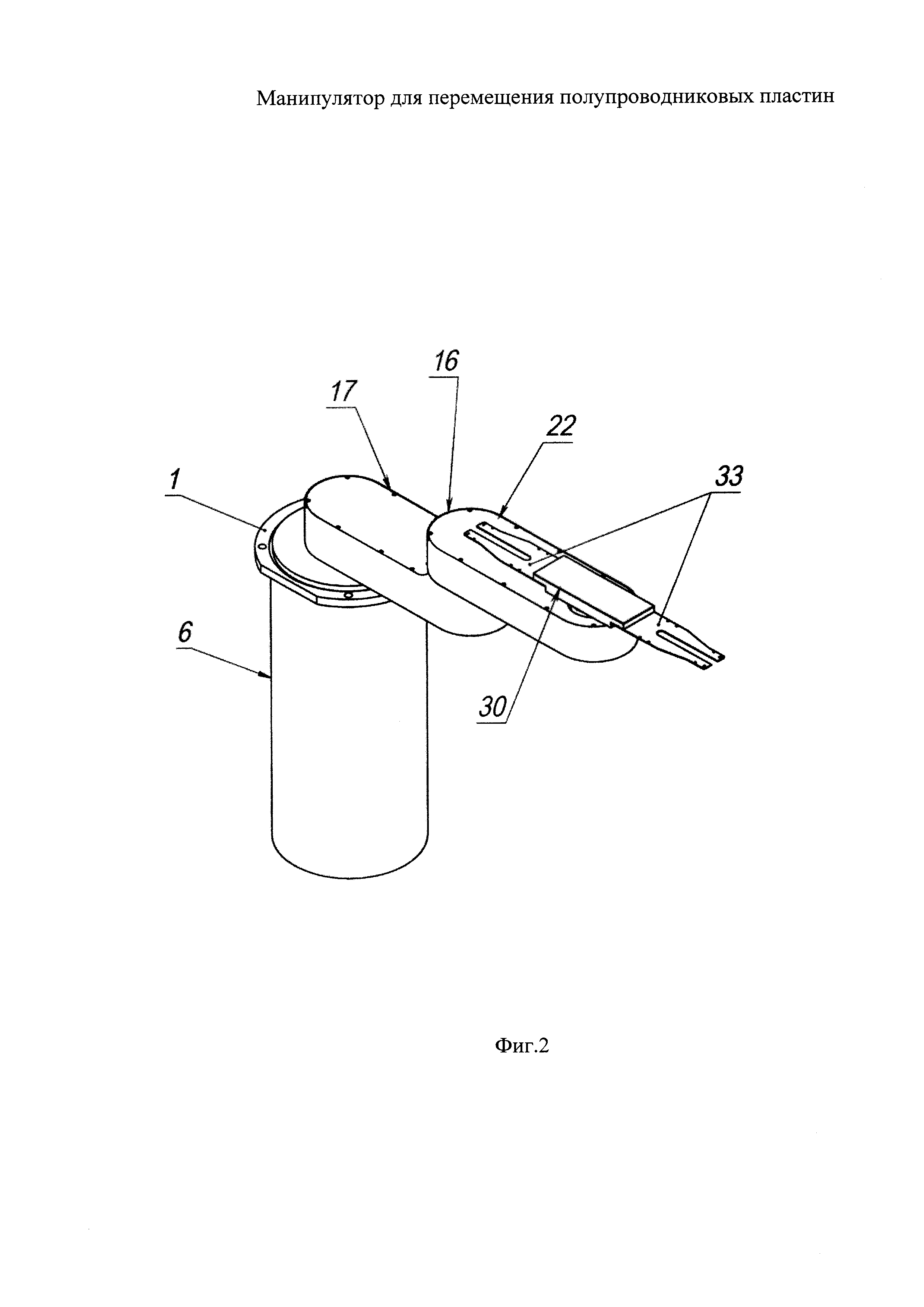
На фиг. 5 изображена модель манипулятора для перемещения полупроводниковых пластин в разложенном состоянии, вид сверху.
Манипулятор для перемещения полупроводниковых пластин содержит основание 1 с установленным на нем подшипниковым узлом 2. В качестве основания 1 можно использовать фланец из дюралюминия. Подшипниковый узел 2 включает коаксиально расположенный в корпусе 3 внутренний вал 4 и внешний вал 5. Манипулятор содержит также привод 6, состоящий из первого двигателя 7, первый ротор 8 которого соединен с внутренним валом 4 через муфту 9. При этом первый статор 10 двигателя 7 соединен с внешним валом 5 подшипникого узла 2. Привод 6 состоит также из второго двигателя 11, второй ротор 12 которого соединен с внешним валом 5 через муфту 40. При этом второй статор 14 второго двигателя 11 соединен с основанием 1 через стакан 15. Манипулятор содержит также руку 16, состоящую из плеча 17, включающего плечевой корпус 18 и плечевой выходной шкив 19, связанный с плечевым входным шкивом 20 плечевым замкнутым ремнем 21. Рука 16 состоит также из локтя 22, локтевой корпус 23 которого через жестко связанный с ним выходной локтевой вал 24 и подшипник 25 соединен с локтевым выходным шкивом 26. При этом выходной шкив 26, в свою очередь, связан локтевым замкнутым ремнем 27 с локтевым входным шкивом 28, жестко связанным через локтевой входной вал 29 с плечевым корпусом 18. При этом локтевой входной шкив 28 имеет диаметр в два раза меньше, чем диаметр локтевого выходного шкива 26. Рука 16 состоит также из кисти 30, кистевой корпус 31 которой жестко связан с локтевым выходным шкивом 26. Причем на концах локтевого выходного шкива 26 расположено не менее одного держателя пластин 33. При этом плечевой корпус 18 жестко соединен с внешним валом 5, а плечевой входной шкив 20 зафиксирован на внутреннем вале 4. На выходе плеча 17 на плечевом корпусе 18 установлен первый редуктор 34. Полый быстроходный входной вал 35 первого редуктора 34 жестко связан с плечевым выходным шкивом 19. При этом редукторный выходной фланец 36 первого редуктора 34 жестко связан с локтевым корпусом 23. Причем диаметр плечевого входного шкива 20 не больше диаметра плечевого выходного шкива 19.
Существует вариант, в котором внутренний вал 4 выполнен полым. Диаметр отверстия внутреннего вала 4 может быть в диапазоне от 4 до 50 мм.
Существует также вариант, в котором локтевой выходной вал 24 выполнен полым. Диаметр отверстия выходного вала 24 может быть в диапазоне от 4 до 50 мм.
Существует также вариант, в котором в качестве первого двигателя 7 используют синхронный двигатель на постоянных магнитах с первым датчиком поворота 37, например, двигатели серии RD компании TQ-Systems GmbH.
Существует также вариант, в котором в качестве второго двигателя 11 используют синхронный двигатель на постоянных магнитах со вторым датчиком поворота 38, например, двигатели серии RD компании TQ-Systems GmbH.
Существует также вариант, в котором первый ротор 8 выполнен полым. Диаметр отверстия первого ротора 8 может быть в диапазоне от 4 до 50 мм.
Существует также вариант, в котором второй двигатель 11 оснащен вторым редуктором 39.
Существует также вариант, в котором второй ротор 12 выполнен полым. Диаметр отверстия второго ротора 12 может быть в диапазоне от 4 до 50 мм.
Существует также вариант, в котором первый двигатель 7 и второй двигатель 11 оснащены соответственно первым фиксирующим ротор устройством 41 и вторым фиксирующим ротор устройством 42. В качестве этих устройств можно использовать тормоза серии RD-RSV компании TQ-Systems GmbH.
Существует также вариант, в котором в качестве первого редуктора 34 используют компактный циклоидальный подшипниковый редуктор с полым сквозным быстроходным входным валом, например, редуктор серии TS компании Spinea.
Существует также вариант, в котором в качестве второго редуктора 39 используют компактный циклоидальный подшипниковый редуктор с полым сквозным быстрым входным валом, например, редуктор серии TS компании Spinea.
Существует также вариант, в котором в качестве первого датчика поворота 37 используют абсолютный многооборотный датчик поворота, например, датчики серии RD-AKSIM компании TQ-Systems GmbH.
Существует также вариант, в котором в качестве второго датчика поворота 38 используют абсолютный однооборотный датчик поворота, например, датчики серии RD-AKSIS компании TQ-Systems GmbH.
Существует также вариант, в котором в качестве второго датчика поворота 38 используют абсолютный многооборотный датчик поворота, например, датчики серии RD-AKSIM компании TQ-Systems GmbH.
Существуют также варианты, в которых в качестве плечевого замкнутого ремня 21 и локтевого замкнутого ремня 27 используют зубчатые ремни из неопрена с кордом из стекловолокна и нейлоновым покрытием зубьев, например, ремни серии PowerGrip® GT® компании Gates.
Существуют также варианты, в которых в качестве плечевого входного шкива 20, плечевого выходного шкива 19, локтевого выходного шкива 26 и локтевого входного шкива 28 используют зубчатые шкивы звездочки из дюралюминия, например, шкивы-звездочки серии Pitch PowerGrip® GT®2 Sprockets компании Gates.
Манипулятор для перемещения полупроводниковых пластин работает следующим образом. Для перемещения полупроводниковых пластин между накопителями и технологическими установками комплекса оборудования (в графических материалах не показаны) в центре между ними устанавливается манипулятор путем крепления основания 1 манипулятора в соответствующем основании комплекса оборудования. Манипулятор работает в автоматическом режиме по заданной программе. В начале работы манипулятор находится в сложенном положении с пустыми держателями пластин 33 (Фиг. 3). По команде от управляющей системы (не показана) манипулятор поворачивается вокруг входной оси плеча 17 так, чтобы ось O-O1 совпала с осью симметрии входа накопителя путем работы только второго двигателя 11, при этом, плечо 17, локоть 22 и кисть 30 с держателями пластин 33 поворачиваются в одном и том же направлении по радиусу с одинаковой угловой скоростью. Затем рука 16 выдвигается вперед к накопителю прямолинейным движением кисти 30 с держателями пластин 33 вдоль оси O-O1, проходя полусложенное состояние (Фиг. 4) и вплоть до полного вытягивания в разложенное состояние (Фиг. 5) за счет одновременной синхронной работы первого двигателя 7 и второго двигателя 11 с выполнением соотношения угловых скоростей их роторов равным: ω1=-2ω2K1D1/D2, где ω1 и ω2 - угловая скорость соответственно первого ротора 8 первого двигателя 7 и второго ротора 12 второго двигателя 11, K1 - передаточное отношение первого редуктора 34. А в варианте манипулятора, когда на втором двигателе 11 установлен второй редуктор 39, соотношения угловых скоростей роторов должно быть равным: ω1=-2ω2K1D1/K2D2, где K2 - передаточное отношение второго редуктора 39, причем в обоих соотношениях учитывается знак передаточного отношения редуктора «+», когда направление вращения входного вала и выходного фланца редуктора совпадают, а «-», когда направление вращения входного вала и выходного фланца редуктора противоположны. Соотношение угловых скоростей показывает, что вращение плеча 17 и вращение локтя 22 производятся в противоположном направлении, причем угловая скорость локтя 22 должна быть в два раза больше, чем угловая скорость плеча 17. При этом угловая скорость плеча 17 и угловая скорость кисти 30 с держателями пластин 33 одинаковы по направлению и величине благодаря тому, что диаметр локтевого входного шкива 28 в два раза меньше диаметра локтевого выходного шкива 26. Таким образом, один из пустых держателей полупроводниковых пластин 33 подводится под необработанную полупроводниковую пластину и при помощи привода накопителя (не показан) эта пластина опускается на держатель. Затем манипулятор складывает руку 16 в обратном порядке до сложенного состояния (Фиг. 3) и разворачивается на 180 угловых градусов. Операция с выдвижением руки 16 в накопитель снова повторяется и загружается вторая необработанная полупроводниковая пластина на другой пустой держатель 33. В сложенном состоянии с двумя необработанными пластинами манипулятор поворачивается вокруг входной оси плеча таким образом, чтобы ось O-O1 совпала с осью симметрии входа технологической установки, затем рука выдвигается описанным выше способом в технологическую установку и устанавливает в ней необработанную полупроводниковую пластину. В сложенном состоянии манипулятор ожидает окончания обработки первой полупроводниковой пластины и забирает ее тем же пустым держателем полупроводниковых пластин 33, затем разворачивается вокруг входной оси плеча на 180 угловых градусов, и устанавливает вторую необработанную полупроводниковую пластину в технологическую установку. Во время обработки второй полупроводниковой пластины рука 16 манипулятора в сложенном состоянии разворачивается вокруг входной оси плеча 17 до совпадения оси О-O1 с осью симметрии входа накопителя и устанавливает в накопитель первую обработанную полупроводниковую пластину и загружает новую необработанную пластину. Затем снова поворачивается напротив входа технологической установки пустым держателем вперед. По окончании обработки второй пластины операции по снятию готовой и установке необработанной полупроводниковой пластины повторяется.
Таким образом, манипулятор может раскладывать и складывать руку 16 вдоль оси О-О1 и менять направление этой оси во всем диапазоне от 0 до 360 угловых градусов, перемещая полупроводниковые пластины между различными накопителями или технологическими установками, находящимися в рабочей зоне манипулятора. Кисть 30 с двумя держателями пластин 33 позволяет забрать из технологической установки обработанную полупроводниковую пластину на один пустой держатель пластин 33 и повернув руку 16 на 180 угловых градусов установить необработанную полупроводниковую пластину, находящуюся на другом держателе пластин 33, в технологическую установку на обработку.
То, что в манипуляторе для перемещения полупроводниковых пластин плечевой корпус 18 жестко соединен с внешним валом 5, а плечевой входной шкив 20 зафиксирован на внутреннем вале 4, на выходе плеча 17 на плечевом корпусе 18 установлен первый редуктор 34, полый быстроходный входной вал 35 которого жестко связан с плечевым выходным шкивом 19, и редукторный выходной фланец 36 которого жестко связан с локтевым корпусом 23, причем диаметр плечевого входного шкива 20 не больше диаметра плечевого выходного шкива 19, приводит к повышению точности позиционирования руки 16 за счет деления погрешности от зубчато-ременной передачи, состоящей из плечевого входного шкива 20, плечевого выходного шкива 19 и замкнутого ремня 21, и дискретности или погрешности датчика поворота 37 на коэффициент редукции введенного редуктора 34, а также за счет повышения жесткости на кручение входной оси локтя 22, т.к. жесткость на кручение у редуктора 34 на порядок выше жесткости на кручение зубчато-ременной передачи.
То, что внутренний вал 4 выполнен полым, приводит к повышению точности позиционирования руки 16 за счет уменьшения действия паразитных моментов от упругих сил и сил трения от проходящих через этот вал с основания 1 на плечо 17 электро- и пневмопроводов.
То, что локтевой выходной вал 24 выполнен полым, приводит к повышению точности позиционирования руки 16 за счет уменьшения действия паразитных моментов упругих сил и сил трения от проходящих через этот вал с локтя 22 на кисть 30 электро- и пневмопроводов.
То, что в качестве первого двигателя 7 используют синхронный двигатель на постоянных магнитах с первым датчиком поворота 37, приводит к повышению точности позиционирования руки 16 за счет высокой точности позиционирования первого ротора 8 в таких двигателях, определяемой дискретностью или погрешностью датчика поворота 37.
То, что в качестве второго двигателя 11 используют синхронный двигатель на постоянных магнитах со вторым датчиком поворота 38, приводит к повышению точности позиционирования руки 16 за счет высокой точности позиционирования второго ротора 12 в таких двигателях, определяемой дискретностью или погрешностью датчика поворота 38.
То, что первый ротор 8 выполнен полым, приводит к повышению точности позиционирования руки 16 за счет уменьшения действия паразитных моментов от упругих сил и сил трения от проходящих через этот ротор с основания 1 на плечо 17 электро- и пневмопроводов.
То, что второй двигатель 11 оснащен вторым редуктором 39, приводит к повышению точности позиционирования руки 16 за счет деления дискретности или погрешности абсолютного датчика поворота 38 данного двигателя на коэффициент редукции введенного второго редуктора 39.
То, что второй ротор 12 выполнен полым, приводит к повышению точности позиционирования руки 16 за счет уменьшения действия паразитных моментов упругих сил и сил трения от проходящих через этот ротор с основания 1 на плечо 17 электро- и пневмопроводов.
То, что первый двигатель 7 и второй двигатель 11 оснащены соответственно первым фиксирующим ротор устройством 41 и вторым фиксирующим ротор устройством 42, приводит к повышению точности позиционирования руки 16 за счет отсутствия неконтролируемого движения составных частей руки и сохранения позиции руки во время аварийного или контролируемого отключения питающего напряжения двигателей.
То, что в качестве первого редуктора 34 используют компактный циклоидальный подшипниковый редуктор с полым сквозным входным быстроходным валом, приводит к повышению точности позиционирования руки 16 за счет высокого коэффициента редукции, высокой радиальной и осевой жесткости и отсутствия люфта у редукторов такого типа.
То, что в качестве второго редуктора 39 используют компактный циклоидальный подшипниковый редуктор с полым сквозным быстрым входным валом, приводит к повышению точности позиционирования руки 16 за счет высокого коэффициента редукции, высокой радиальной и осевой жесткости и отсутствия люфта у редукторов такого типа.
То, что в качестве первого датчика поворота 37 используют абсолютный многооборотный датчик поворота, приводит к повышению точности позиционирования руки 16 за счет отсутствия сбоя в определении позиции, который характерен для инкрементальных датчиков поворота, во время скачка питающего напряжения или других электромагнитных помех, воздействующих на подсчет импульсов, т.к. абсолютный датчик определяет абсолютное значение позиции как во время включенного, так и во время отключенного питающего напряжения, а функция многооборотности необходима потому, что для поворота локтя 22 на один оборот, первый ротор 8 должен повернутся на число оборотов, равное передаточному отношению редуктора 34.
То, что в качестве второго датчика поворота 38 используют абсолютный однооборотный датчик поворота, приводит к повышению точности позиционирования руки 16 за счет отсутствия сбоя в определении позиции, который характерен для инкрементальных датчиков поворота, после скачка питающего напряжения или других электромагнитных помех, воздействующих на подсчет импульсов, т.к. абсолютный датчик все время определяет абсолютное значение позиции даже во время отсутствия питающего напряжения.
То, что в качестве второго датчика поворота 38 используют абсолютный многооборотный датчик поворота, приводит к повышению точности позиционирования руки 16 за счет отсутствия сбоя в определении позиции, который характерен для инкрементальных датчиков поворота, во время скачка питающего напряжения или других электромагнитных помех, воздействующих на подсчет импульсов, т.к. абсолютный датчик определяет абсолютное значение позиции как во время включенного, так и во время отключенного питающего напряжения, а функция многооборотности необходима потому, что для поворота руки 16 на один оборот, второй ротор 12 должен повернутся на число оборотов, равное передаточному отношению редуктора 39.
То, что в качестве плечевого замкнутого ремня 21 и локтевого замкнутого ремня 27 используют зубчатые ремни из неопрена с кордом из стекловолокна и нейлоновым покрытием зубьев, а в качестве плечевого входного шкива 20, плечевого выходного шкива 19, локтевого выходного шкива 26 и локтевого входного шкива 28 используют зубчатые шкивы звездочки из дюралюминия, приводит к повышению точности позиционирования руки 16 за счет высокой жесткости ремня, точного расположения и повышенной износостойкости зубьев, обеспечивающей уменьшение люфта и мертвого хода.
Плазменное устройство нанесения многослойных пленочных покрытий
Плазменный реактор с магнитной системой
Устройство для нанесения покрытий в вакууме
Плазменно-дуговое устройство формирования покрытий
Устройство для формирования многокомпонентных и многослойных покрытий
Реактор для плазменной обработки полупроводниковых структур
Реактор для плазмохимического травления полупроводниковых структур
Устройство для осаждения тонких пленок из газовой фазы
Устройство для травления полупроводниковых структур
Устройство для вакуумно-плазменного осаждения материалов с ионной стимуляцией
Плазменное устройство нанесения многослойных пленочных покрытий
Плазменный реактор с магнитной системой
Состав для обезвреживания нефтезагрязнённых материалов
Устройство для автоматической смены инструментов
Устройство для нанесения покрытий в вакууме
Плазменно-дуговое устройство формирования покрытий
Способ формирования трехмерных структур топологических элементов функциональных слоев на поверхности подложек
Устройство для формирования многокомпонентных и многослойных покрытий
Реактор для плазменной обработки полупроводниковых структур
Реактор для плазмохимического травления полупроводниковых структур

