Результат интеллектуальной деятельности: Способ управления током асинхронного двигателя при питании от автономного инвертора напряжения
Вид РИД
Изобретение
Изобретение относится к области электротехники и может быть использовано для управления оптимальными по быстродействию электроприводами, применяемыми в механизмах металлургического производства, подъемно-крановых электроприводах и других.
Известен способ управления током электродвигателя переменного тока (Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. Москва, ACADEMA, 2006, стр. 101), реализующий частотно-токовое управление на базе преобразователей частоты с автономным инвертором напряжения с широтно-импульсной модуляцией, согласно которому, при питании двигателя от транзисторного инвертора напряжения производят регулирование тока двигателя в зависимости от его заданной и измеренной величины посредством управления работой транзисторов фазных плеч инвертора с помощью двухпозиционных регуляторов тока.
Недостатком настоящего технического решения является низкое быстродействие при управлении током электродвигателя.
Наиболее близким по технической сущности к предлагаемому изобретению является способ управления электроприводом с преобразователем частоты без широтно-импульсного модулятора (прямое управление током) на базе схемы с двухпозиционными гистерезисными регуляторами, имеющими характеристику вход-выход с неизменной петлей гистерезиса (Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. Москва, ACADEMA, 2006, стр. 103), согласно которому при питании двигателя от транзисторного инвертора напряжения производят регулирование тока двигателя посредством управления транзисторами фазных плеч инвертора, для чего определяют ошибку регулирования путем сравнения задающего синусоидального сигнала соответствующей фазы и текущего значения тока, затем сигналом ошибки регулирования воздействуют на релейный двухпозиционный регулятор, имеющий характеристику вход - выход с неизменным положительным и отрицательным постоянным гистерезисом.
Недостатком настоящего технического решения является низкая стабильность частоты переключений транзисторов фазных плеч инвертора при управлении током двигателя, следствием чего являются повышенные потери электроэнергии, вызывающие излишний перегрев транзисторов.
Технической задачей предлагаемого изобретения является стабилизация периода переключения силовых транзисторов инвертора, формирующих ток статора асинхронного двигателя.
Технический результат заключается в стабилизации частоты переключения тока автономного инвертора напряжения, питающего статор асинхронного двигателя, что приводит к снижению нагрева транзисторов инвертора и повышение энергоэффективности электропривода в целом.
Это достигается тем, что в известном способе регулирования тока статора асинхронного двигателя при питании его от автономного инвертора напряжения, выполненного с фазными плечами на транзисторах, включающем регулирование тока двигателя посредством управления транзисторами фазных плеч инвертора, для чего определяют ошибку регулирования путем сравнения задающего синусоидального сигнала соответствующей фазы и текущего значения тока той же фазы, затем сигналом ошибки регулирования для каждой фазы воздействуют на двухпозиционный релейный регулятор тока соответствующей фазы, имеющий характеристику вход-выход с положительным и отрицательным гистерезисом, при регулировании тока двигателя в зависимости от его заданной и измеренной величин, осуществляют измерение выходного напряжения источника постоянного напряжения, угловой скорости асинхронного двигателя и изменение величины петли гистерезиса двухпозиционных релейных регуляторов тока каждой фазы h+i - при положительном значении на входе, и h-i - при отрицательном, которые рассчитываются согласно уравнениям:


где







где: i=1, 2, 3 - номер фазы,
t - текущее время
U0 - напряжение на выходе источника постоянного напряжения;
iзадi - текущее значение задания среднего тока в фазе i,
ƒшим - частота ШИМ модуляции,
Т0 - период ШИМ модуляции
ΔT - разность времен нарастания и убывания тока на периоде ШИМ,
LΣ - суммарная индуктивность цепи нагрузки автономного инвертора
RΣ - суммарное сопротивление цепи нагрузки автономного инвертора;
R1 - сопротивление цепи статора,
 - приведенное сопротивление цепи ротора,
- приведенное сопротивление цепи ротора,
Тэ - электромагнитная постоянная временицепи нагрузки автономного инвертора,
Iк - ток короткого замыканияцепи нагрузки автономного инвертора,
s - скольжение ротора асинхронного двигателя,
ω - угловая частота вращения асинхронного двигателя,
ω0 - угловая частота задающего сигнала тока асинхронного двигателя.
Такое управление позволяет стабильно поддерживать заданную частоту ШИМ модуляции автономного инвертора напряжения.
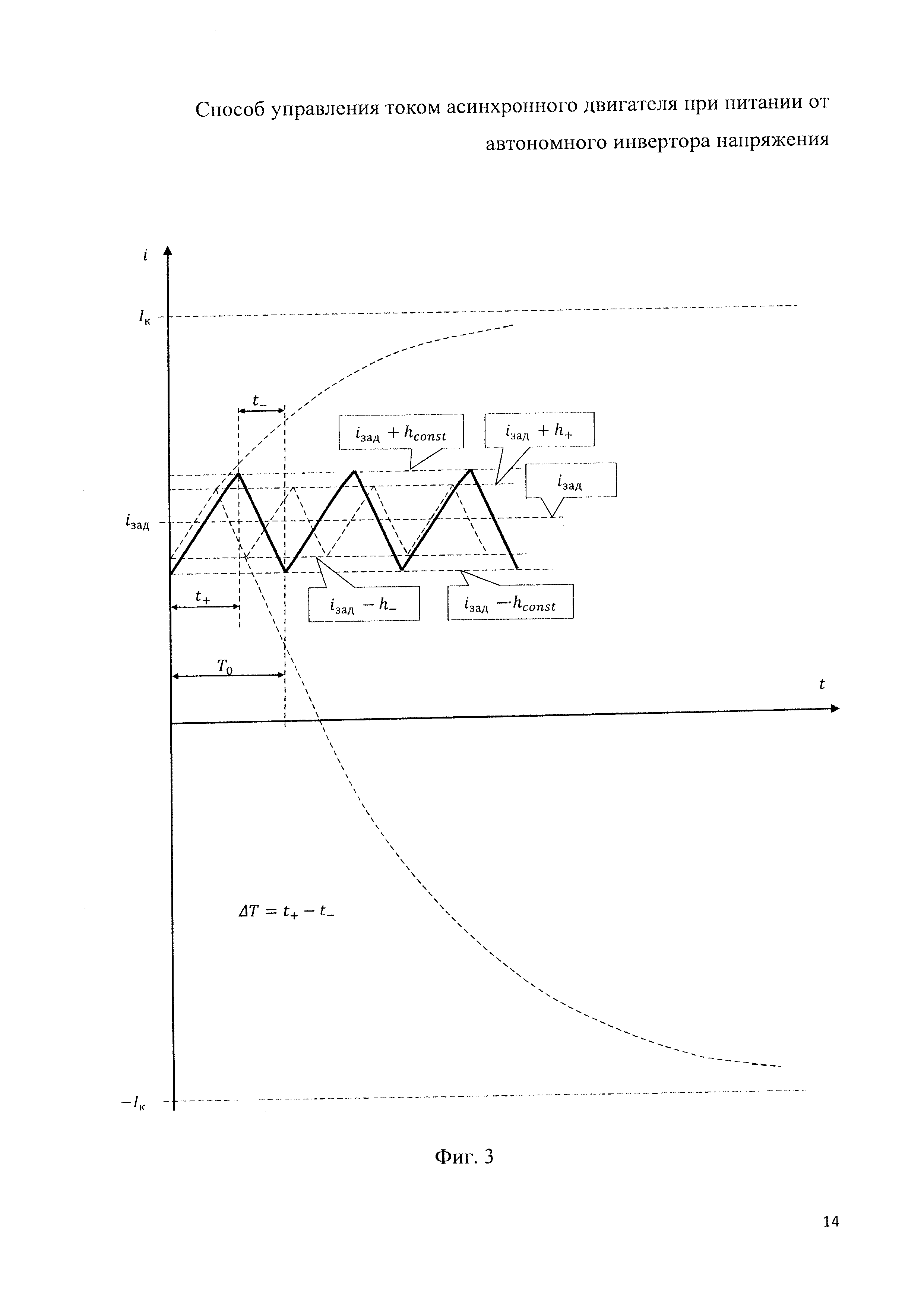
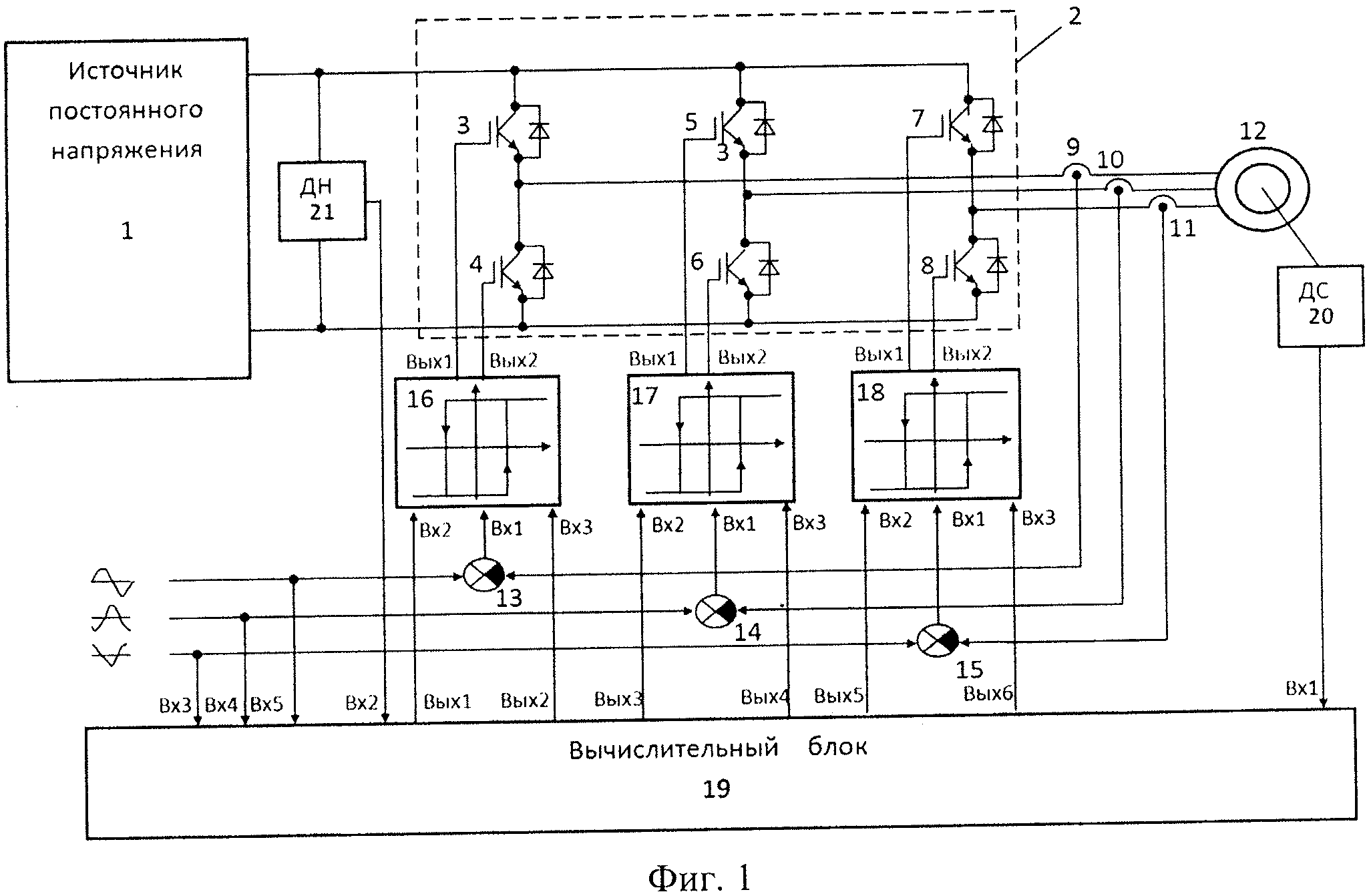
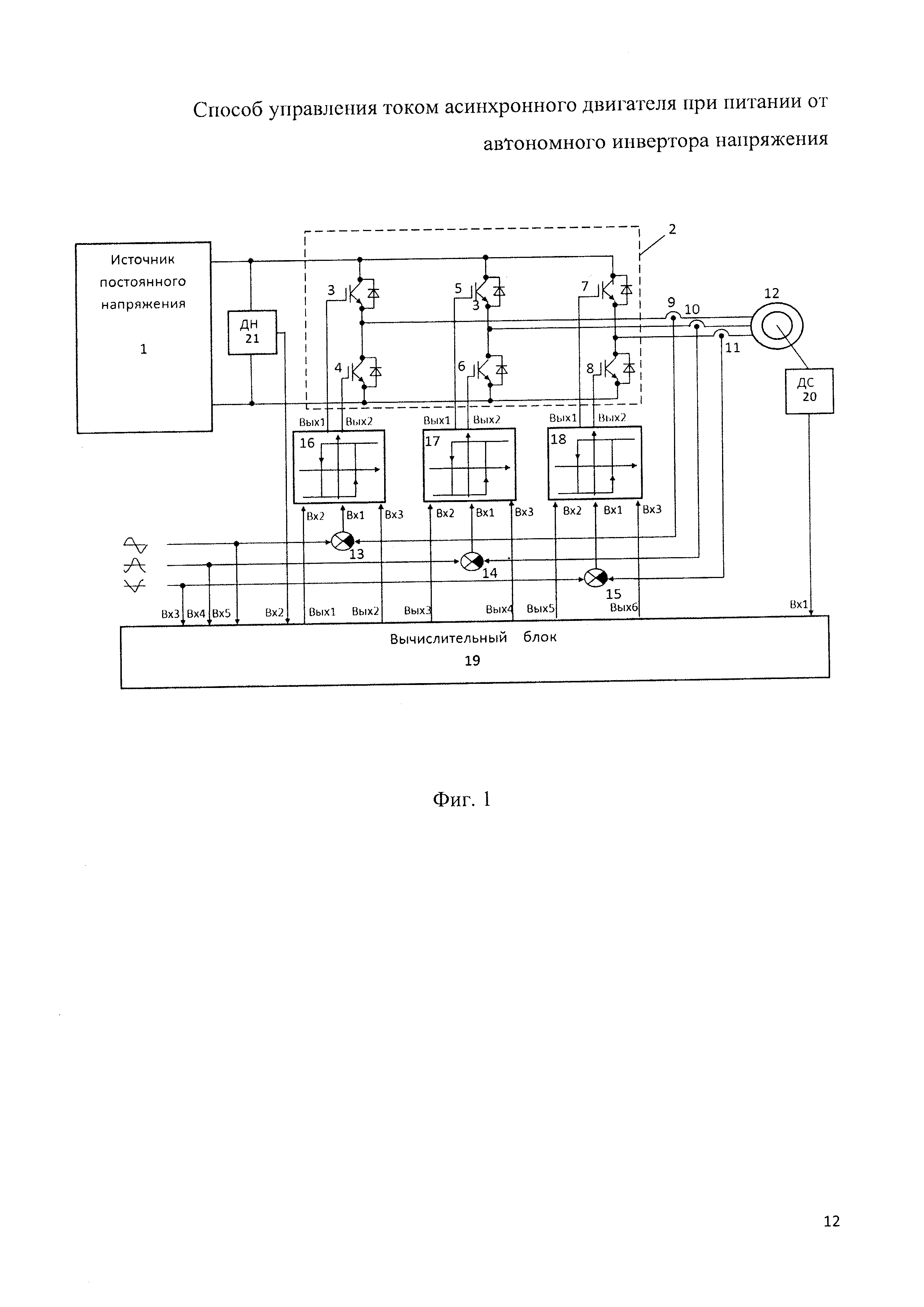
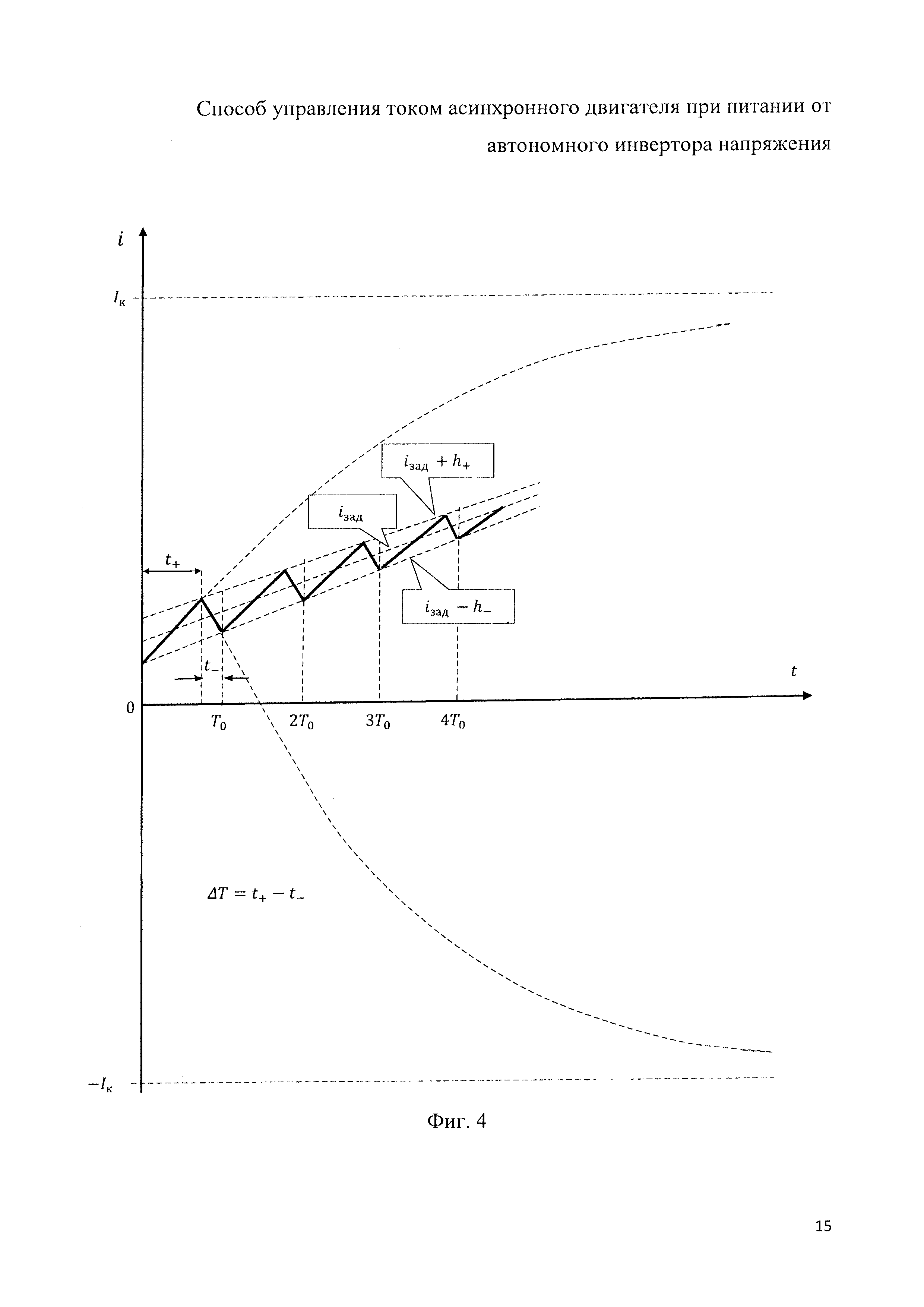
Сущность предлагаемого способа управления поясняется чертежами, где на фиг. 1 изображена структурная схема устройства, реализующего предлагаемый способ управления током асинхронного двигателя, на фиг. 2 представлена кривая, иллюстрирующая ток на выходе инвертора при постоянном сигнале его задания и расчетным гистерезисом характеристик двухпозиционных релейных регуляторов тока, на фиг. 3 приведена кривая иллюстрирующая ток в нагрузке при постоянной величине гистерезиса, на фиг. 4 изображена кривая изменения тока в нагрузке, иллюстрирующая результат применения предлагаемого способа управления им при линейно изменяющемся сигнале задания тока.
Устройство, реализующее предлагаемый способ управления током асинхронного двигателя при питании от автономного инвертора напряжения, содержит источник постоянного напряжения 1, к выходу которого подсоединен вход автономного инвертора напряжения 2, включающего три плеча фазного выходного напряжения, первое из которых выполнено в виде первого верхнего 3 и первого нижнего 4 транзисторов, второе - в виде второго верхнего 5 и второго нижнего 6 транзисторов, третье - в виде третьего верхнего 7 и третьего нижнего 8 транзисторов. Каждая пара транзисторов соединена между собой и подсоединена к положительному и отрицательному выходам источника постоянного напряжения 1.
При этом выходы каждого плеча фазного выходного напряжения через три датчика тока (первый 9, второй 10 и третий 11), соединены со статором асинхронного двигателя 12.
Выходы первого 9, второго 10 и третьего 11 датчиков тока подключены к инверсным входам, соответственно, первого 13, второго 14 и третьего 15 узлов вычисления ошибки регулирования фазных токов, положительные входы которых выполнены с возможностью приема управляющих синусоидальных сигналов задания соответствующих фазных токов двигателя. Выходы первого 13, второго 14 и третьего 15 узлов вычисления ошибки соединены с первыми входами, соответственно, первого 16, второго 17 и третьего 18 двухпозиционных релейных регуляторов тока с положительным и отрицательным гистерезисом.
Первый и второй выходы первого двухпозиционного релейного регулятора тока 16 соединены с входами, соответственно, первого верхнего 3 и первого нижнего 4 транзисторов автономного инвертора напряжения 2; первый и второй выходы второго двухпозиционного релейного регулятора тока 17 соединены со входами, соответственно, второго верхнего 5 и второго нижнего 6 транзисторов автономного инвертора напряжения 2; первый и второй выходы третьего двухпозиционного релейного регулятора тока 18 соединены со входами, соответственно, третьего верхнего 7 и третьего нижнего 8 транзисторов автономного инвертора напряжения 2 плеч фазного выходного напряжения.
При этом каждый двухпозиционный релейный регулятор тока (16, 17 и 18) выполнен с дополнительными вторым и третьим входами, подключенными к выходам вычислительного блока 19. Так, второй и третий входы первого двухпозиционного релейного регулятора тока 16 соединены, соответственно, с первым и вторым выходами вычислительного блока 19; второй и третий входы второго двухпозиционного релейного регулятора тока 17 соединены, соответственно, с третьим и четвертым выходами вычислительного блока 19; второй и третий входы третьего двухпозиционного релейного регулятора тока 18 соединены, соответственно, с пятым и шестым выходами вычислительного блока 19.
Первый вход вычислительного блока 19 подсоединен к выходу датчика скорости вращения 20, установленного на валу асинхронного двигателя 12, второй вход вычислительного блока 19 подключен к выходу датчика напряжения 21, включенного на входе автономного инвертора напряжения 2, третий, четвертый и пятый входы вычислительного блока 19 выполнены с возможностью приема управляющих синусоидальных сигналов задания соответствующих фазных токов.
Реализация представленным устройством предлагаемого способа управления током асинхронного двигателя при питании от автономного инвертора напряжения осуществляется следующим образом.
Сигнал с датчика напряжения 21, измеряющего выходное напряжение источника постоянного напряжения 1, подается на второй вход вычислительного блока 19. Сигнал с датчика скорости вращения 20, измеряющего угловую скорость асинхронного двигателя 12, подается на первый вход вычислительного блока 19. Вычислительный блок 19 вычисляет значения положительной h+i и отрицательной h-i величин петли гистерезиса для каждого из двухпозиционных релейных регуляторов тока 16, 17, 18 для каждой фазы согласно уравнениям (1) и (2), и передает вычисленные значения с выходов 1-6 вычислительного блока 19 на вторые и третьи входы соответствующих двухпозиционных релейных регуляторов тока 16, 17, 18.
Управляющие синусоидальные сигналы задания фазных токов двигателя подаются на неинвертирующие входы первого 13, второго 14 и третьего 15 узлов вычисления ошибки регулирования фазных токов, а также на третий, четвертый и пятый входы вычислительного блока 19.
Первым 13, вторым 14 и третьим 15 узлами вычисления ошибки регулирования фазных токов определяются ошибки регулирования путем сравнения управляющих синусоидальных сигналов задания тока соответствующих фаз и текущих значений тока в этих фазах, поступающих от первого 9, второго 10 и третьего 11 датчиков тока. Сигналы ошибки регулирования для каждой фазы подаются на первый 16, второй 17 и третий 18 двухпозиционные релейные регуляторы тока соответствующих фаз. При превышении сигналом ошибки значения гистерезиса характеристики двухпозиционного релейного регулятора тока происходит срабатывание двухпозиционного релейного регулятора тока соответствующей фазы.
С первых выходов первого 16, второго 17 и третьего 18 двухпозиционных релейных регуляторов тока сигналы подаются на соответствующие управляющие входы первого верхнего 3, второго верхнего 5 и третьего верхнего 7 транзисторов, а со вторых выходов первого 16, второго 17 и третьего 18 двухпозиционных релейных регуляторов тока сигналы подаются на соответствующие управляющие входы первого нижнего 4, второго нижнего 6 и третьего нижнего 8 транзисторов автономного инвертора напряжения 2, питающего асинхронный двигатель 12, что приводит к соответствующим переключениям транзисторов 3-8 и изменению тока в асинхронном двигателе 12 на следующем периоде ШИМ.
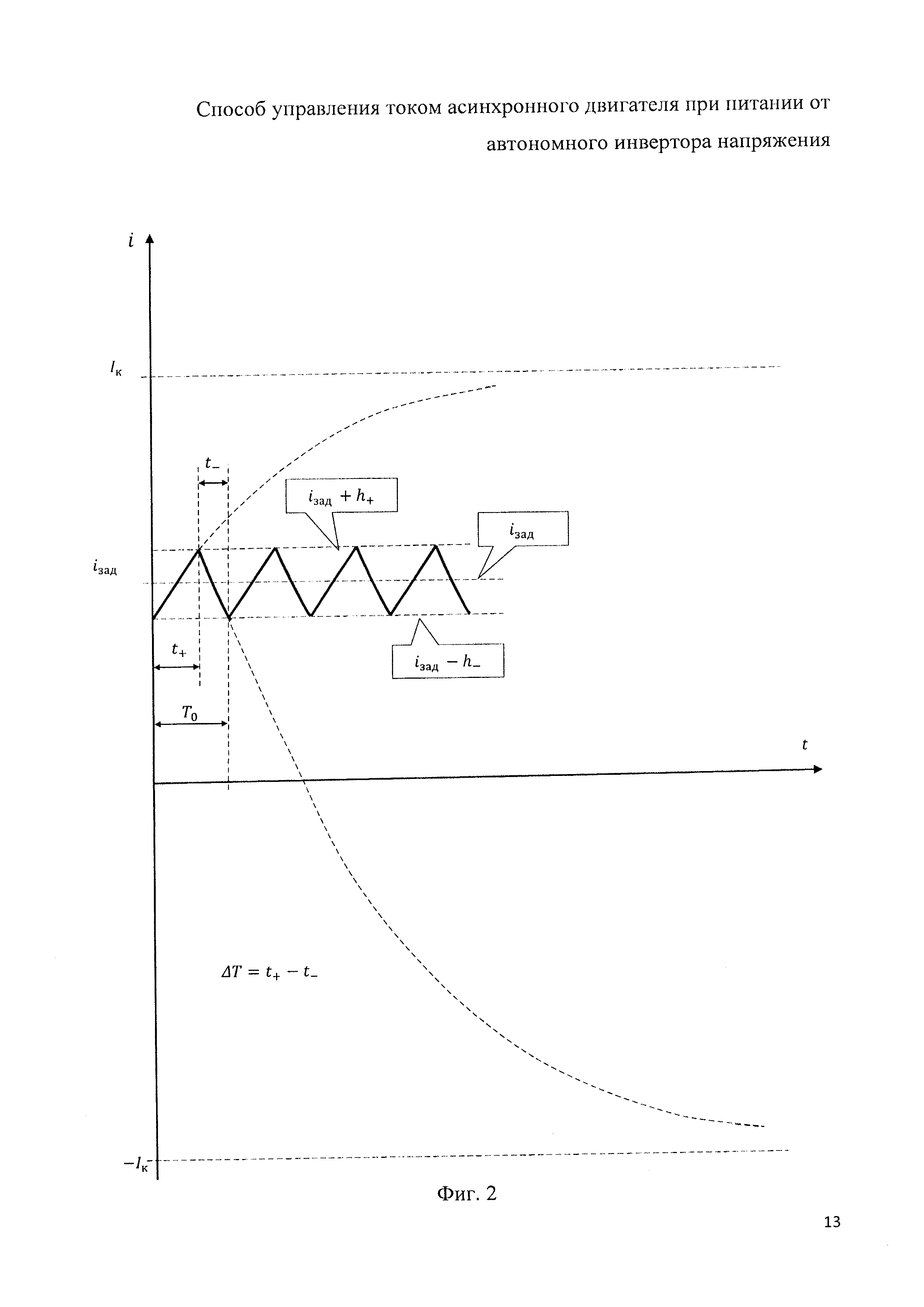
Благодаря тому, что значения гистерезиса h+i и h-i вычисляются по уравнениям 1 и 2, следующее срабатывание соответствующего двухпозиционного релейного регулятора тока 16, 17 или 18 произойдет через заданный период времени Т0, состоящий из суммы времен нахождения регулятора во включенном t+ и выключенном t+ (фиг. 2) состояниях. Равенство периода работы двухпозиционных релейных регуляторов тока заданному значению обеспечивается тем, что уравнения 1 и 2 для вычисления значений h+i и h-i получены на основе расчета тока на выходе автономного инвертора напряжения 2, работающего с постоянной заданной частотой переключений ШИМ и сигнале задания тока iзадi.
Это обстоятельство поясняет фиг. 2, где представлена кривая тока на выходе автономного инвертора напряжения 2 при постоянном сигнале задания тока для одной фазы. Для других фаз кривые аналогичны. На одном периоде колебаний ШИМ с заданной частотой ƒшим=1/Т0 форма тока однозначно определяется величиной задания среднего тока iзадi и имеет два характерных участка: возрастания в течение времени t+ и убывания в течение времени t-, как показано на фиг. 2. Каждый из этих участков описывается экспоненциальной функцией, являющейся решением дифференциального уравнения первого порядка, описывающего ток на выходе автономного инвертора напряжения 2.

где знак «+» в правой части соответствует интервалу возрастания тока на периоде ШИМ, а знак «-» - убыванию,
i - текущее значение тока фазы двигателя
Исходя из непрерывности тока в статоре асинхронного двигателя 12, ток в начале каждого участка равен току в конце предыдущего участка. Кроме того, сумма времен возрастания и убывания тока должна равняться периоду ШИМ Т0, а среднее значение тока должно равняться его заданному значению. Решение дифференциального уравнения, описывающего ток, при выполнении указанных выше условий позволяет однозначно определить уравнения для вычисления гистерезиса регуляторов тока h+i и h-i. по которым производятся их расчеты в вычислительном блоке 19, а полученные значения передаются с выходов 1-6 вычислительного блока 19 на входы 1-2 управления гистерезисом двухпозиционных релейных регуляторов тока 16, 17, 18.
Момент начала возрастания тока определяется условием
i≤iзадi-h-i,
а момент начала убывания тока определяется условием
i≥iзадi+h+i
При выполнении указанных выше условий ток на выходе автономного инвертора напряжения 2 будет колебаться с частотой ШИМ, при этом среднее значение графика тока будет равно заданному среднему значению. Из графиков тока на выходе автономного инвертора напряжения 2 (фиг. 3) видно, что при постоянной величине гистерезиса hconst период ШИМ отличается от заданного. Из графика тока при линейно изменяющемся задании, приведенного на фиг. 4, видно, что благодаря изменению гистерезиса двухпозиционного релейного регулятора тока удается получить постоянную частоту коммутации автономного инвертора напряжения 2.
Перечисленные выше обстоятельства использования предлагаемого способа управления свидетельствуют об исключении режима работы инвертора с нестабильной, повышенной частотой коммутации ШИМ. Получаемый благодаря предлагаемому способу режим работы инвертора со стабильной частотой коммутации ШИМ характеризуется меньшими потерями энергии в транзисторных ключах автономного инвертора при управлении током асинхронного двигателя, в отличие от режима с изменяющейся частотой коммутации в прототипе.
Таким образом, использование предлагаемого изобретения позволяет оптимизировать потери энергии на коммутацию в автономном инверторе напряжения, питающем статор асинхронного двигателя, за счет стабилизации периода переключения силовых транзисторов инвертора напряжения.







Способ бесперебойного электропитания потребителей
Осветительное устройство с отражателем-радиатором излучающего диода
Преобразователь постоянного напряжения в квазисинусоидальное трёхфазное напряжение повышенной мощности
Способ синхронизации по времени устройств рза с использованием параметров аварийного режима
Режекторный волноводный свч-фильтр
Способ измерения собственной добротности диэлектрического резонатора
Рабочее колесо насоса-турбины со структурой бугорков горбатого кита
Автоматическая термовесовая установка для исследования кинетики сушки железорудных окатышей в потоке газа-теплоносителя
Безредукторный электропривод лифта (варианты)
Способ управления частотно-регулируемым электроприводом штангового глубинного насоса с асинхронным двигателем

