Результат интеллектуальной деятельности: МАНИПУЛЯТОР ДЛЯ СУБМИКРОННЫХ ПЕРЕМЕЩЕНИЙ
Вид РИД
Изобретение
Изобретение относится к машиностроению, в частности к оборудованию для туннельной и электронной микроскопии, прецизионной литографии, для микрохирургии и биологических исследований, а именно к созданию механизмов, обеспечивающих контролируемое перемещение объектов с субмикронной точностью.
В качестве прототипа выбран наиболее близкий по технической сущности пространственный механизм, принцип действия которого изложен в описании изобретения к патенту РФ №1726233, 1990 г., МПК B26J 1/00, содержащий основание и выходное звено, связанные между собой кинематическими цепями, включающими две кинематические пары, связанные с основанием и выходным звеном, два промежуточных звена и расположенный между ними привод поступательного перемещения выходного звена, отличающийся тем, что, с целью повышения точности позиционирования, он снабжен вращательными кинематическими парами и рычагами, установленными по одному в каждой кинематической цепи, при этом рычаг жестко связан с одним из промежуточных звеньев, а привод установлен между рычагом и вторым промежуточным звеном.
В этом пространственном механизме вращательные пары выполнены в виде упругих элементов прямоугольного поперечного и Х-образного продольного сечений, а привод установлен с натягом. Эти пары связаны с основанием и выходным звеном промежуточными звеньями круглого сечения.
Описанный механизм может найти применение как микроманипулятор в электронной промышленности и микрохирургии.
К недостаткам упомянутого выше пространственного механизма можно отнести небольшое передаточное отношение между движением в приводе и изменением положения объекта, находящегося на выходном звене, что не позволяет сократить величину перемещений до единиц нанометров. Кроме того, промышленное изготовление рычагов с кинематическими парами, форма которых получается сочетанием прямоугольных элементов с телами вращения, требует усложненного технологического процесса, приводящего к высокой стоимости изделия. Также целесообразно уменьшить число двигателей, что также будет способствовать уменьшению себестоимости и увеличению надежности.
Цель изобретения - устранение отмеченных недостатков и повышение экономической и эксплуатационной эффективности устройств манипулирования.
Поставленная цель достигается тем, что в предлагаемом манипуляторе основание соединено с подвижной платформой тремя рычагами с большим передаточным отношением, которые приводятся в движение тремя линейными двигателями, например, п действия которых основано, например, на обратном пъезоэффекте, причем оси последних повернуты относительно друг друга на угол в 120 градусов и лежат в плоскости, параллельной плоскости выходного звена. Для достижения поставленной цели манипулятор для субмикронных перемещений содержит установленное на основании выходное звено в виде передвижной платформы и соединенное с основанием посредством кинематических звеньев, состоящих из кинематических пар и линейного двигателя. В этом устройстве подвижная платформа представляет собой треугольную призму, на каждой боковой грани которой закреплены опорные звенья, сопряженные с помощью кинематических пар, закрепленных у вершин треугольника призмы, с размещенными вдоль боковой грани платформы рычагами, каждый из которых консольно соединен с основанием с одного конца с помощью упругого шарнира с возможностью качания рычага вокруг вертикальной оси, а с другого конца - посредством кинематической пары и линейного двигателя с возможностью перемещения рычага в пределах хода линейного двигателя.
На представленных чертежах показаны:
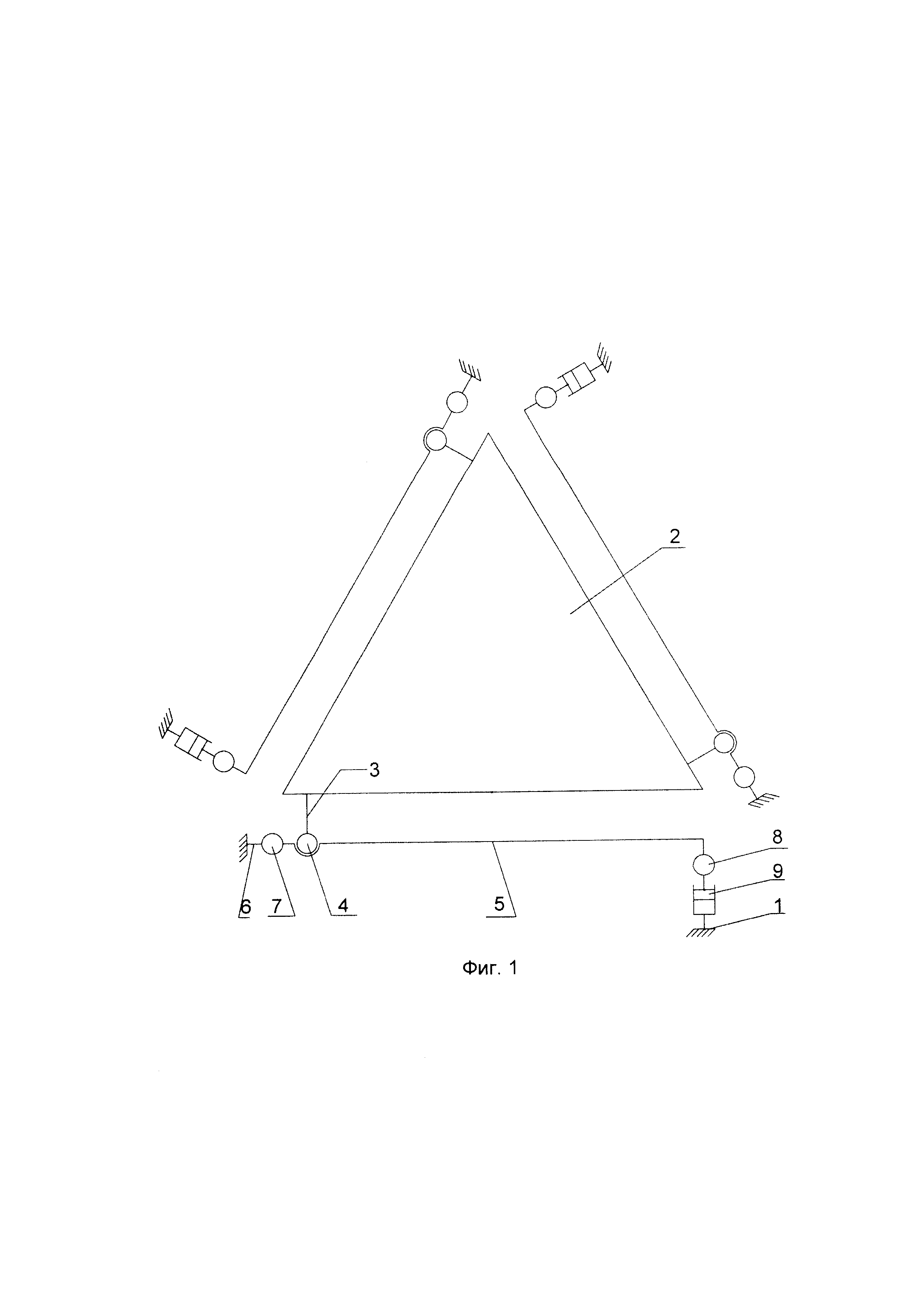
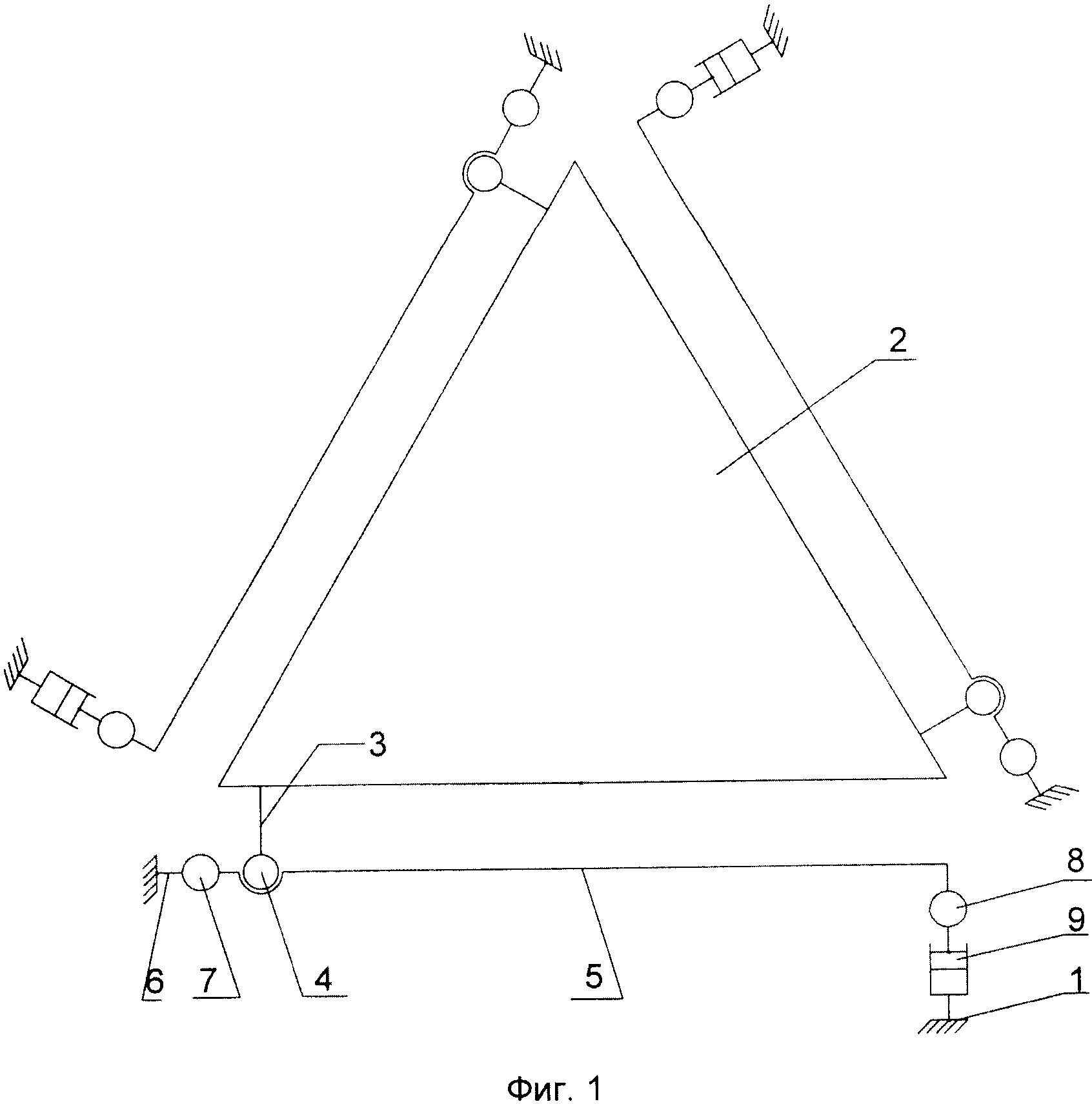
Фиг. 1 - схема манипулятора;
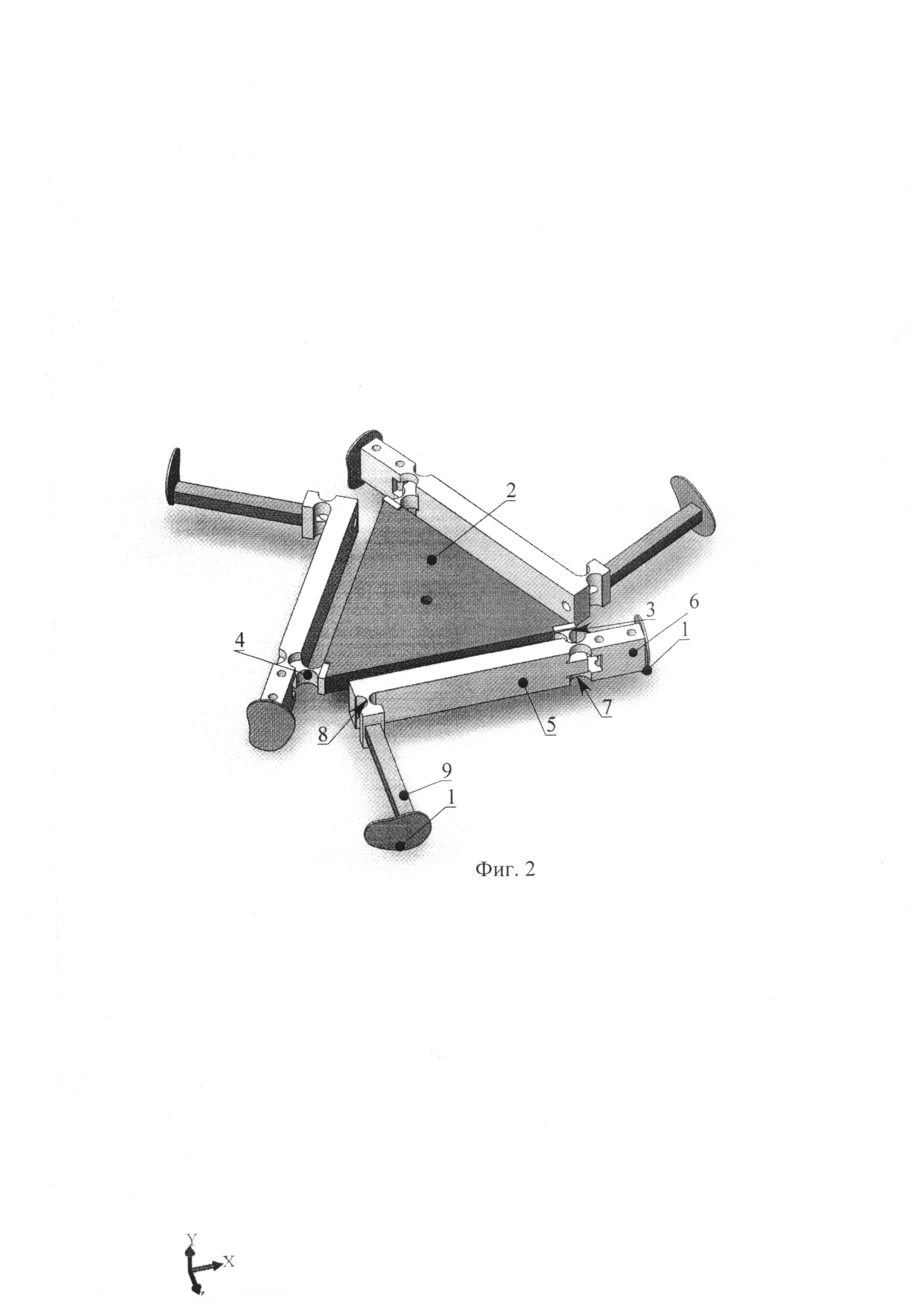
Фиг. 2 - общий вид устройства.
Манипулятор для субмикронных перемещений представляет собой устройство, содержащее установленное на основании 1 выходное звено в виде подвижной платформы 2, выполненные по форме треугольной призмы, на каждой боковой грани у вершин треугольника закреплены опорные звенья 3, которые с помощью кинематических пар 4, сопряженные с размещенными вдоль боковой грани призмы рычагами 5, каждый из которых консольно соединен с основанием 1 с одного конца с помощью неподвижной заделки 6 и шарнира 7 с возможностью качания рычага вокруг вертикальной оси этого шарнира, а с другого конца - посредством кинематической цепи, включающей кинематическую пару 8 и линейный двигатель 9, с возможностью перемещения рычага 5 в пределах хода линейного двигателя 9. В данном манипуляторе для обеспечения субмикронных перемещений в качестве линейных двигателей 8 могут быть использованы пьезодвигатели.
Манипулятор (Фиг. 1) работает следующим образом.
Манипулирование движением выходного звена выполняется 2 выполняется посредством управления трех линейных двигателей 9. Размещенный и соединенный с основанием 1 с одного конца линейный двигатель 9 через кинематическую пару 8 воздействует на рычаг 5, опора которого консольно соединена с основанием 1 посредством заделки 6 и поворотного шарнира 7 с возможностью поворота рычага относительно оси шарнира 7 в пределах хода линейного двигателя 9. При повороте рычага 5 усилие передается через кинематическую пару 4 платформе (выходному звену) 2. Учитывая разность плеча приложения усилий от двигателя 9 рычагу 5 и плеча передачи усилия от рычага 5 в сторону платформы 2, представляется возможным обеспечение передачи субмикронных перемещений выходному звену - подвижной платформе 2, на которой размещается перемещаемый объект. Аналогично действуют два других рычага. Задаваемое сложное субмикронное перемещение платформы 2 относительно основания 1 достигается совместным действием всех приводов.
Композиция для приготовления комплексной добавки для бетонов и способ ее производства
Пространственный механизм с шестью степенями свободы
Коробка передач
Способ получения покрытия
Способ обработки длинномерных изделий из алюминиевых сплавов
Способ нанесения покрытия на стальную основу
Ходовая гайка механизма линейного перемещения
Способ работы четырехтактного двигателя внутреннего сгорания с водородом в качестве горючего и с предварительным охлаждением топливной смеси криогенной компонентой воздуха
Способ работы двухтактного двигателя внутреннего сгорания с водородом в качестве горючего и использованием энергии выхлопа в пульсационной трубе
Перемещающийся массажер и способ осуществления массажа с его помощью
Модульная робототехническая технологическая установка
Механизм с тремя степенями свободы
Пространственный механизм с шестью степенями свободы
Пространственный механизм
Пространственный механизм с тремя степенями свободы
Пространственный механизм с четырьмя степенями свободы
Пространственный механизм с шестью степенями свободы
Поризованный гипсовый материал с добавлением фотокатализатора-диоксида титана
Способ определения тензора инерции тела
Способ комбинированного наведения летательного аппарата

