Результат интеллектуальной деятельности: УСТРОЙСТВО ОЦЕНКИ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, СПОСОБ ОЦЕНКИ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству оценки положения транспортного средства и способу оценки положения транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Традиционная технология, раскрытая в Патентной литературе 1, представляет собой технологию, в которой автономно движущийся мобильный робот оценивает положение транспортного средства в соответствии с величиной перемещения и путем сопоставления пути, определенного в ходе лазерного сканирования, с полученной заранее картографической информацией выполняет корректировку оценочного положения транспортного средства. Определенный путь и картографическая информация рассматриваются как двумерные данные, если смотреть в плане, и при выполнении сопоставления используются только данные, находящиеся в заданном диапазоне от текущего местоположения.
Список библиографических документов
Патентная литература
[0003] Патентная литература 1: JP 2008-250906 A
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
[0004] При возникновении ошибки в информации об определенном пути из-за возникновения ошибки в величине перемещения возникает различие между определенной формой пути и фактической формой пути и степень соответствия между информацией об определенном пути и картографической информацией уменьшается, что не позволяет оценивать положение транспортного средства с высокой точностью.
Задача настоящего изобретения заключается в повышении точности оценки положений транспортного средства.
Решение задачи
[0005] Устройство оценки положения транспортного средства в соответствии с одним аспектом настоящего изобретения определяет положения ориентира на периферии транспортного средства и наряду с этим определяет величины перемещений транспортного средства и сохраняет положения ориентира в качестве данных о положении ориентира на основе величин перемещений. В дополнение, устройство оценки положения транспортного средства группирует часть данных о положении ориентира в группу в соответствии с состояниями поворота транспортного средства и на основе величин перемещений транспортного средства при определении данных о положении ориентира устанавливает диапазон корректировки для группы. Кроме того, устройство оценки положения транспортного средства получает картографическую информацию, включающую в себя положения ориентира, и путем сопоставления данных о положении ориентира с положениями ориентира в картографической информации на основе установленного диапазона корректировки оценивает положение транспортного средства.
Полезные эффекты изобретения
[0006] В соответствии с настоящим изобретением, поскольку положение транспортного средства оценивается путем сопоставления данных о положении ориентира с картографической информацией при корректировке данных о положении ориентира в пределах диапазона корректировки, точность оценки положения транспортного средства может быть улучшена.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 представляет собой конфигурационную схему устройства оценки положения транспортного средства;
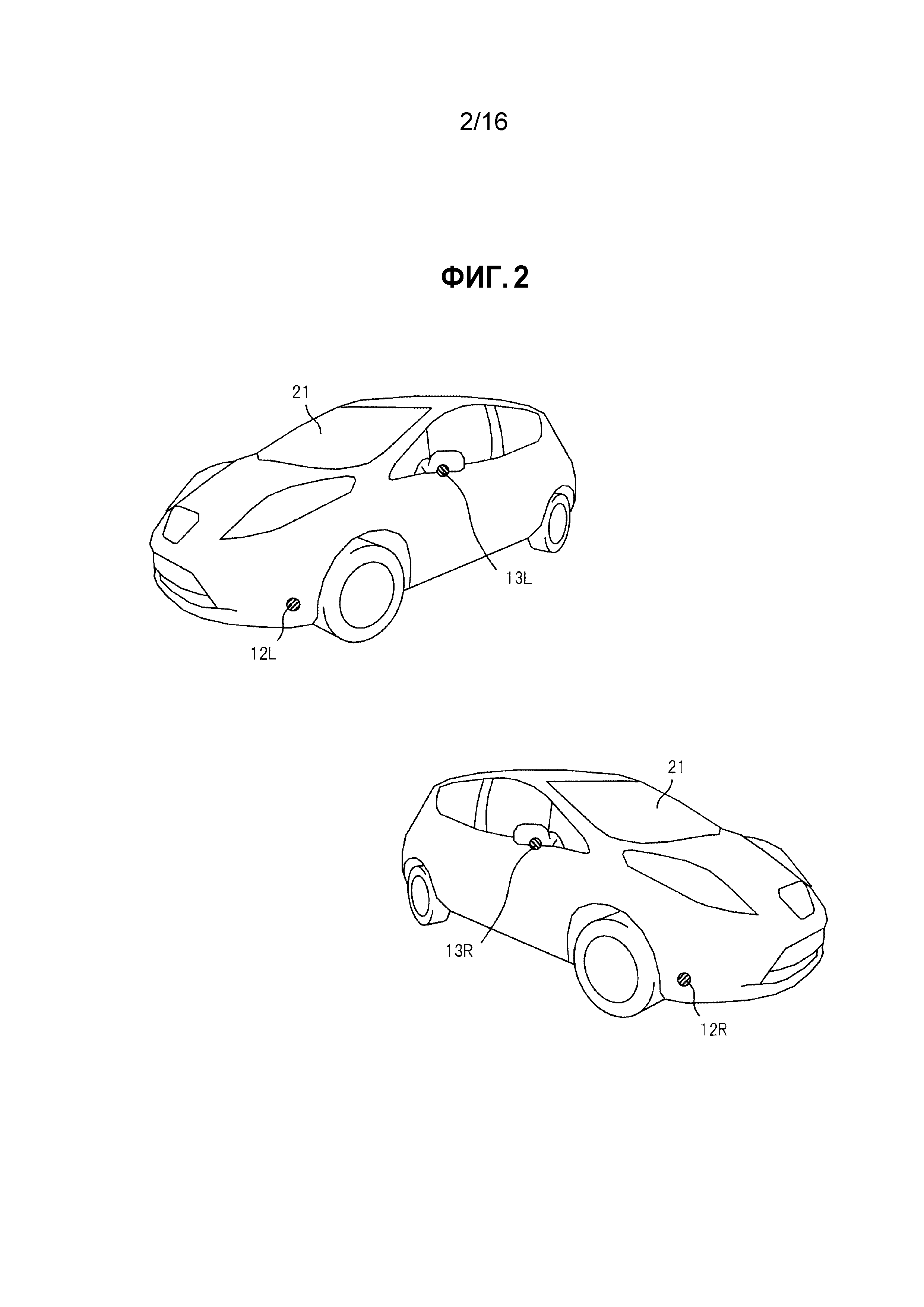
Фиг. 2 представляет собой схематическое изображение, иллюстрирующее расположение радиолокационных устройств и камер;
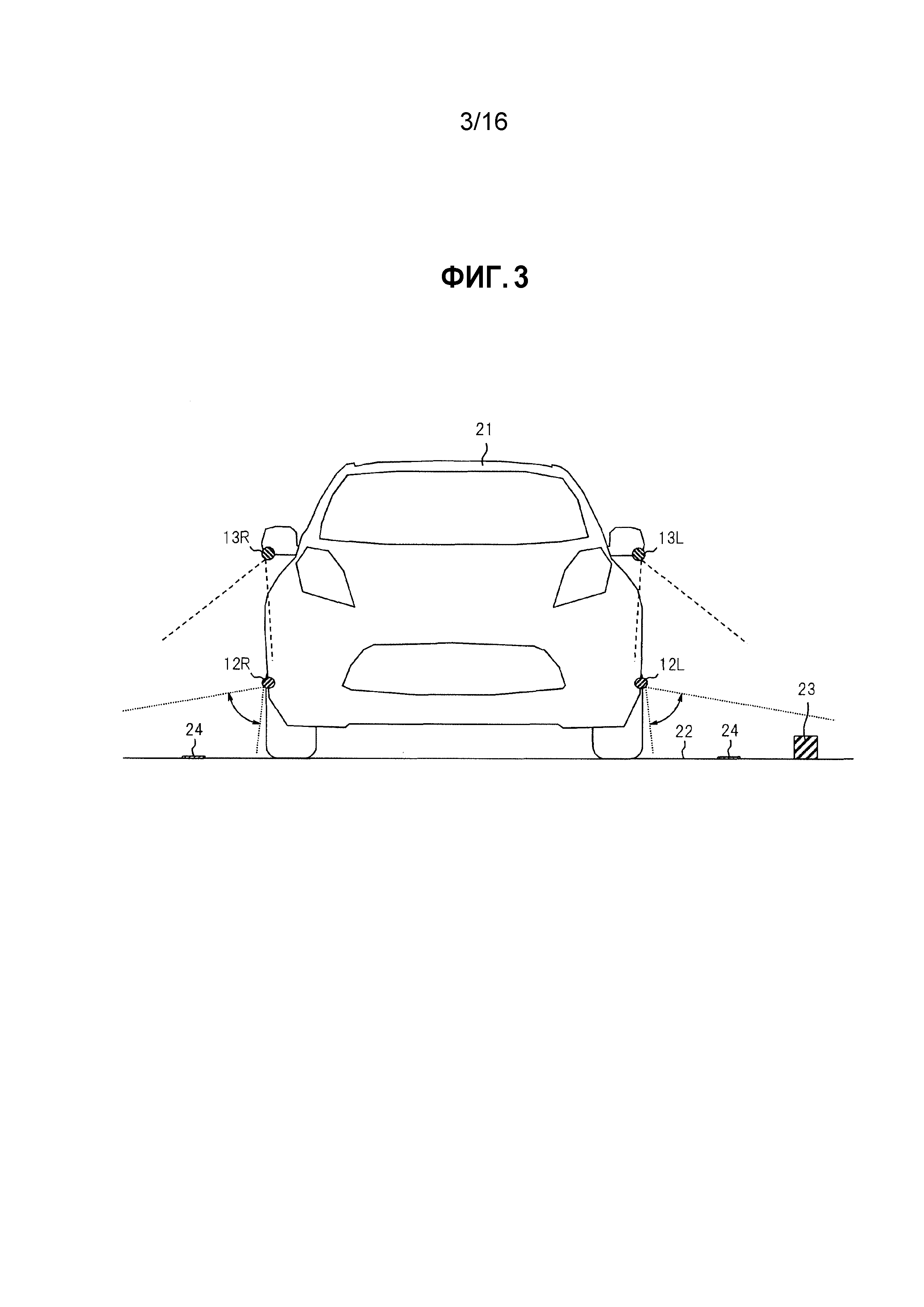
Фиг. 3 представляет собой схематическое изображение, иллюстрирующее диапазоны сканирования радиолокационных устройств и диапазоны обзора камер;
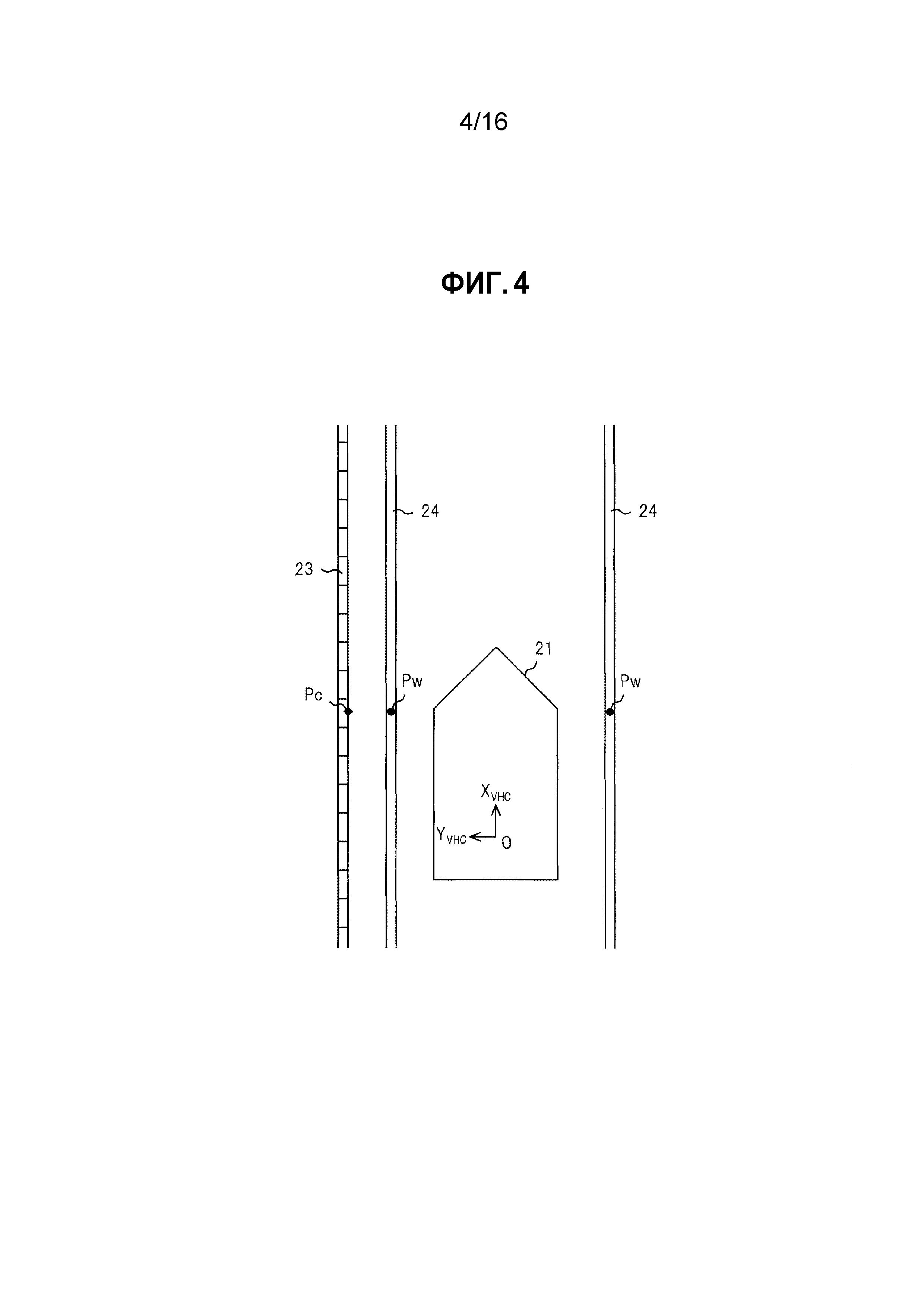
Фиг. 4 представляет собой схематическое изображение, иллюстрирующее систему координат транспортного средства;
Фиг. 5 представляет собой схематическое изображение, иллюстрирующее систему координат одометрии;
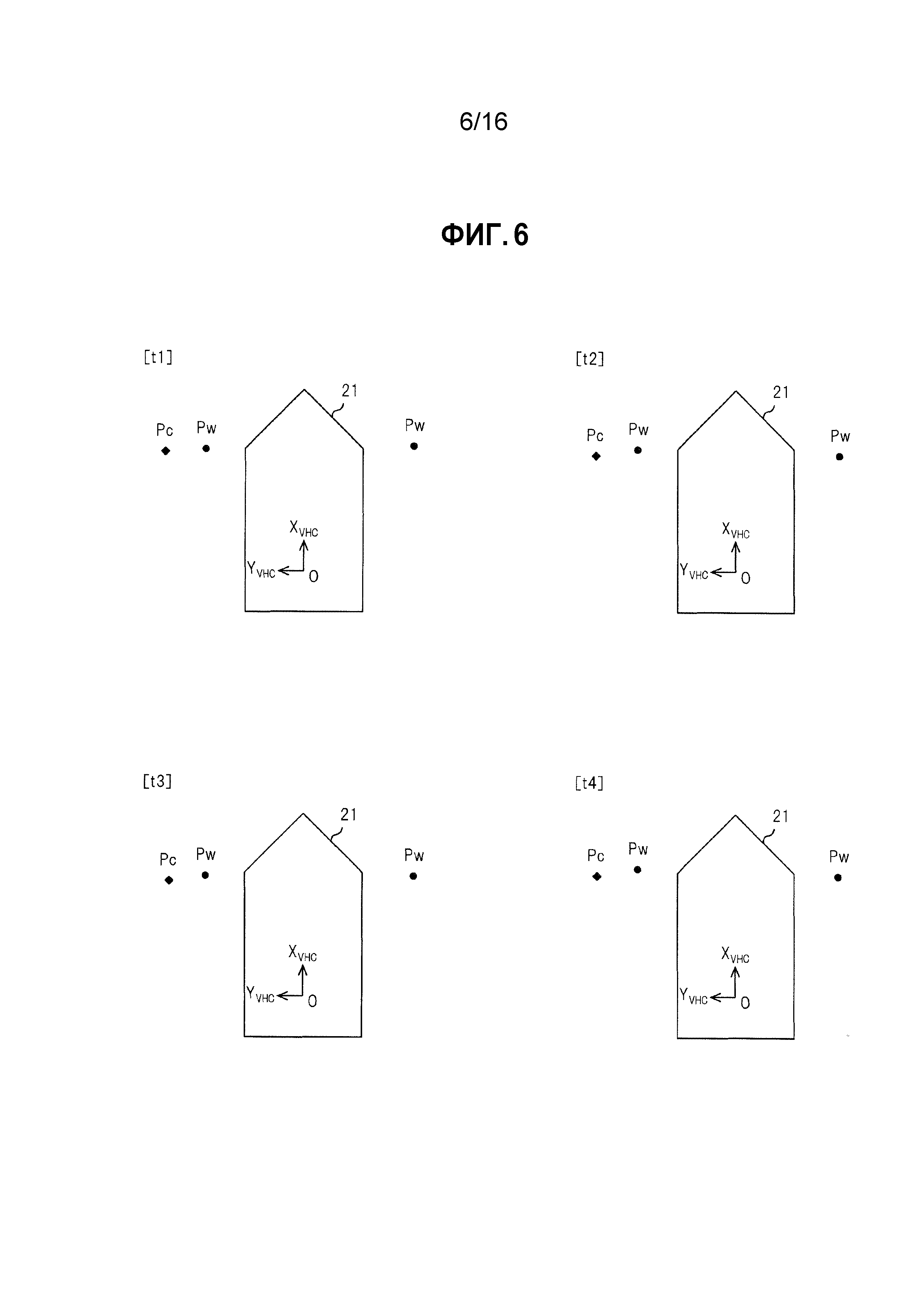
Фиг. 6 представляет собой схематическое изображение, иллюстрирующее положения ориентиров в системе координат транспортного средства;
Фиг. 7 представляет собой схематическое изображение, на котором траектория движения связана с положениями ориентиров;
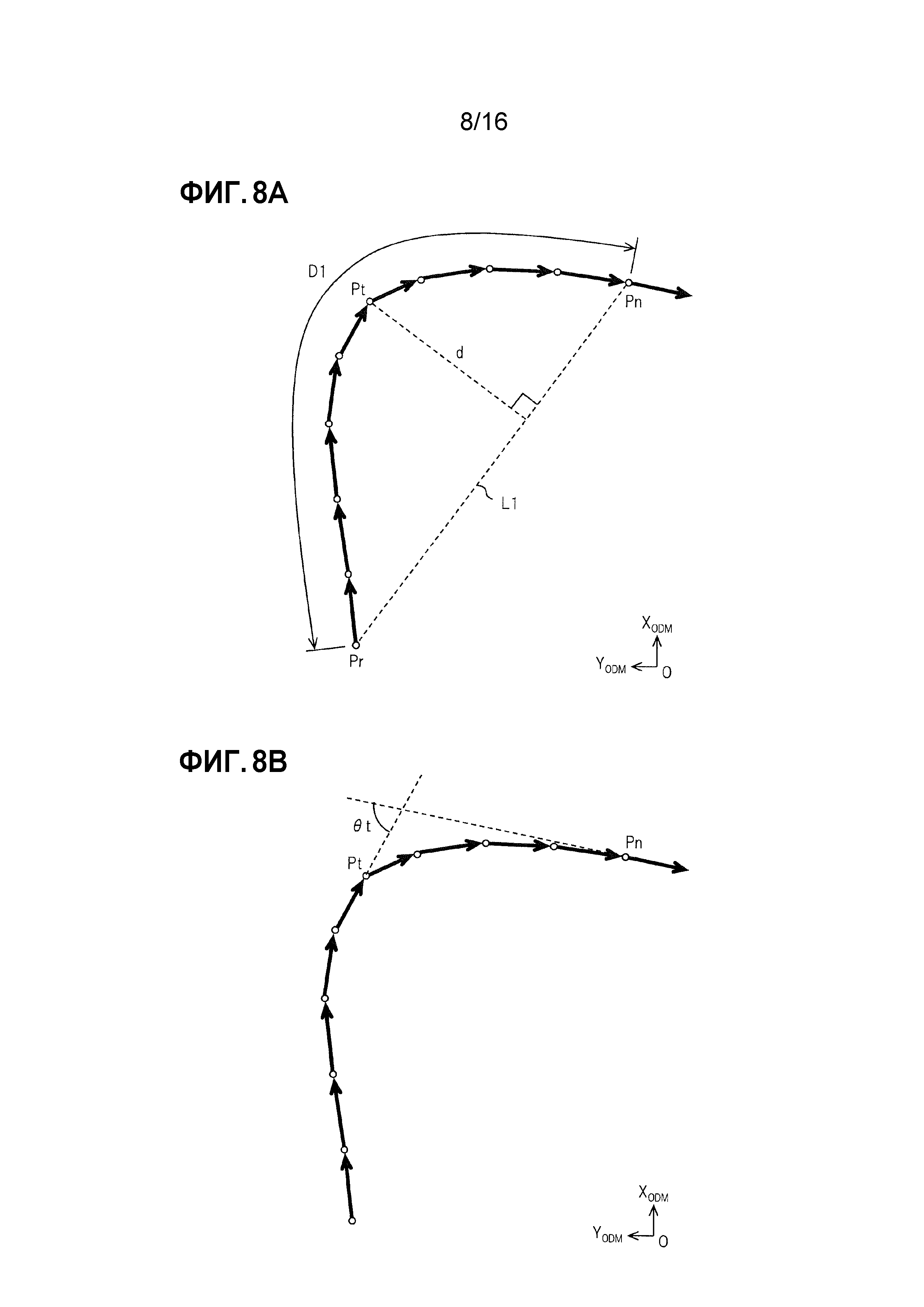
Фиг. 8A и 8B представляют собой схематические изображения, иллюстрирующие способы обнаружения точки Pt поворота;
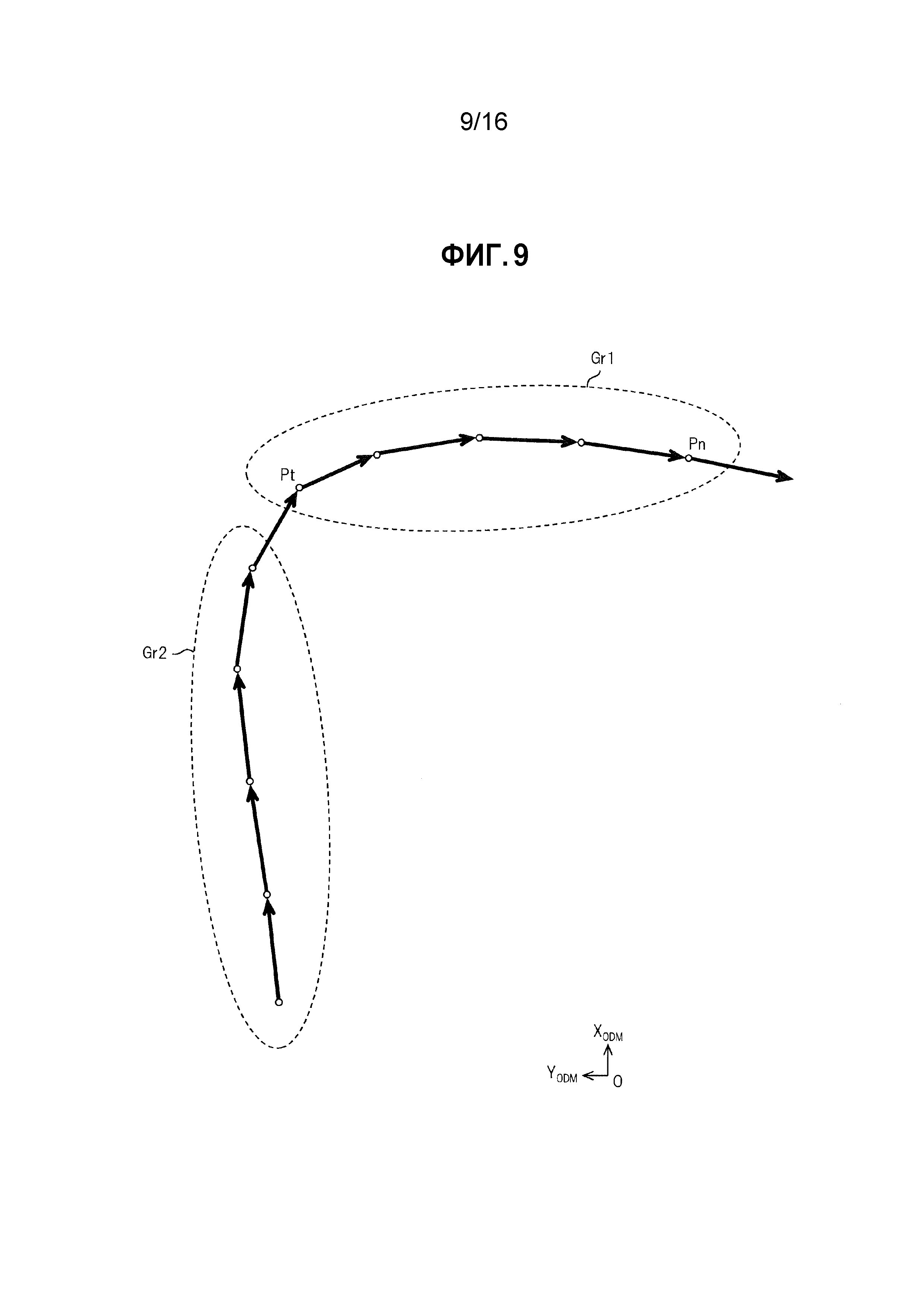
Фиг. 9 представляет собой схематическое изображение, иллюстрирующее группирование;
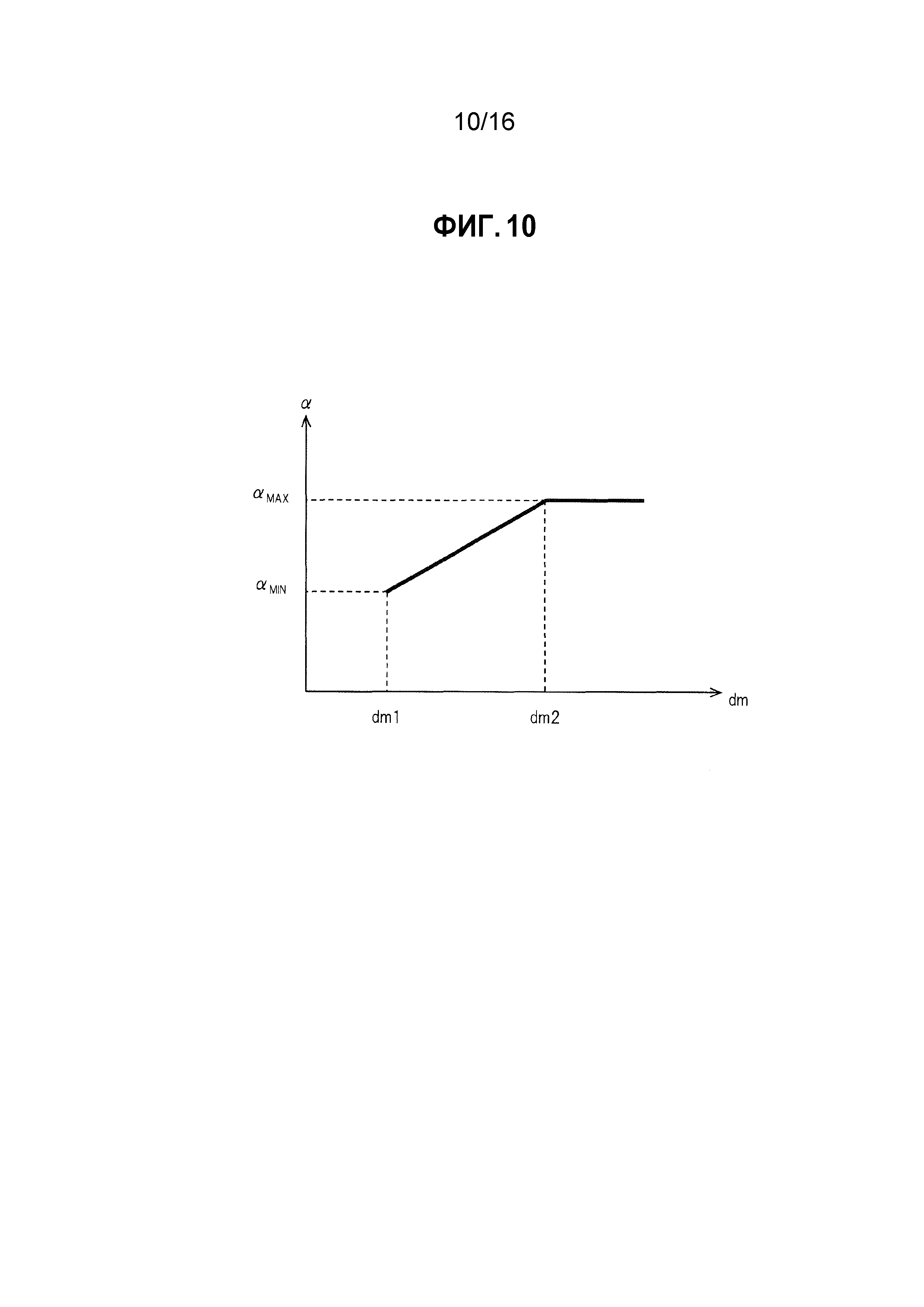
Фиг. 10 представляет собой график, используемый для установки допустимого диапазона α.
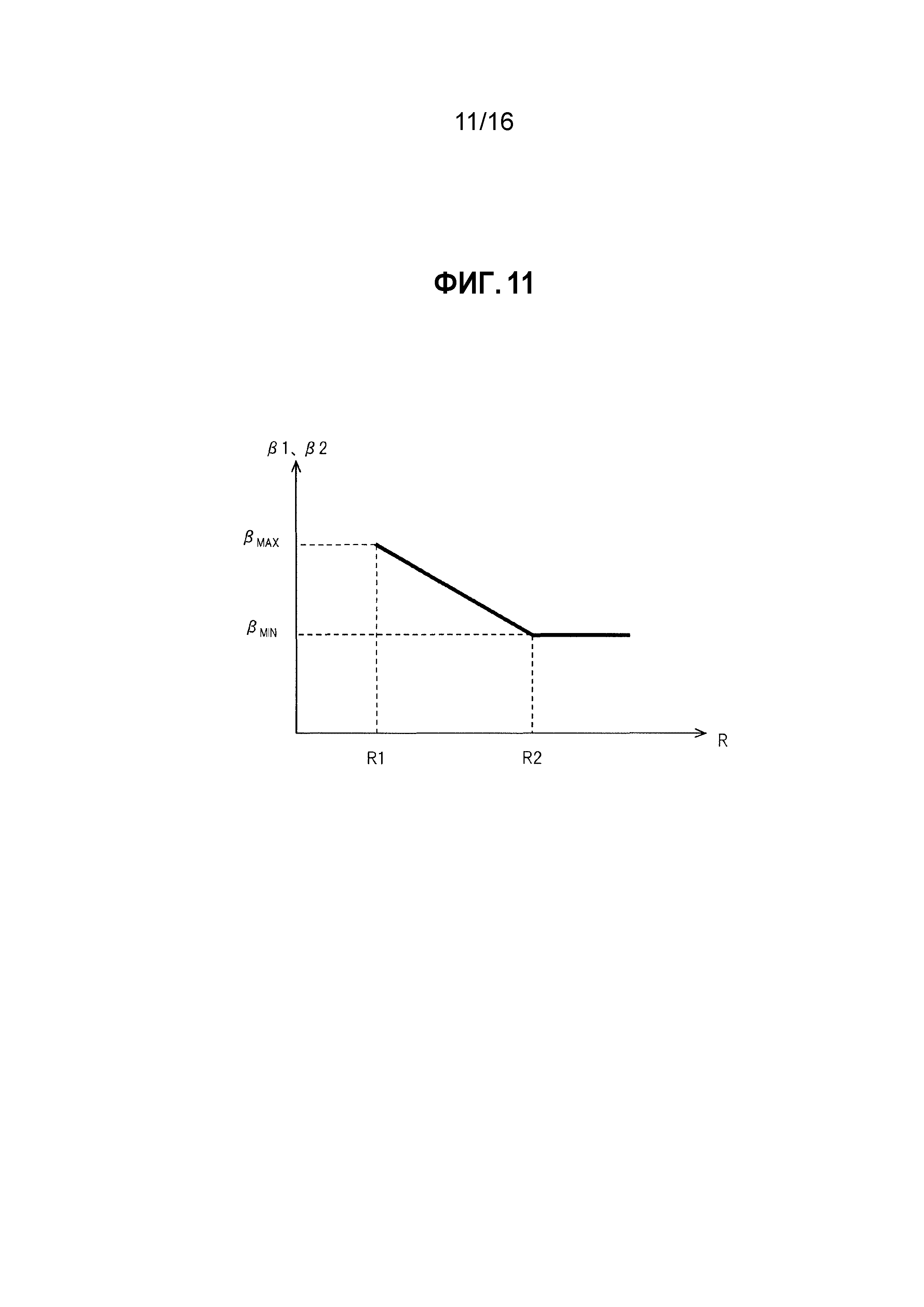
Фиг. 11 представляет собой график, используемый для установки допустимых диапазонов β1 и β2 в соответствии с радиусом R поворота;
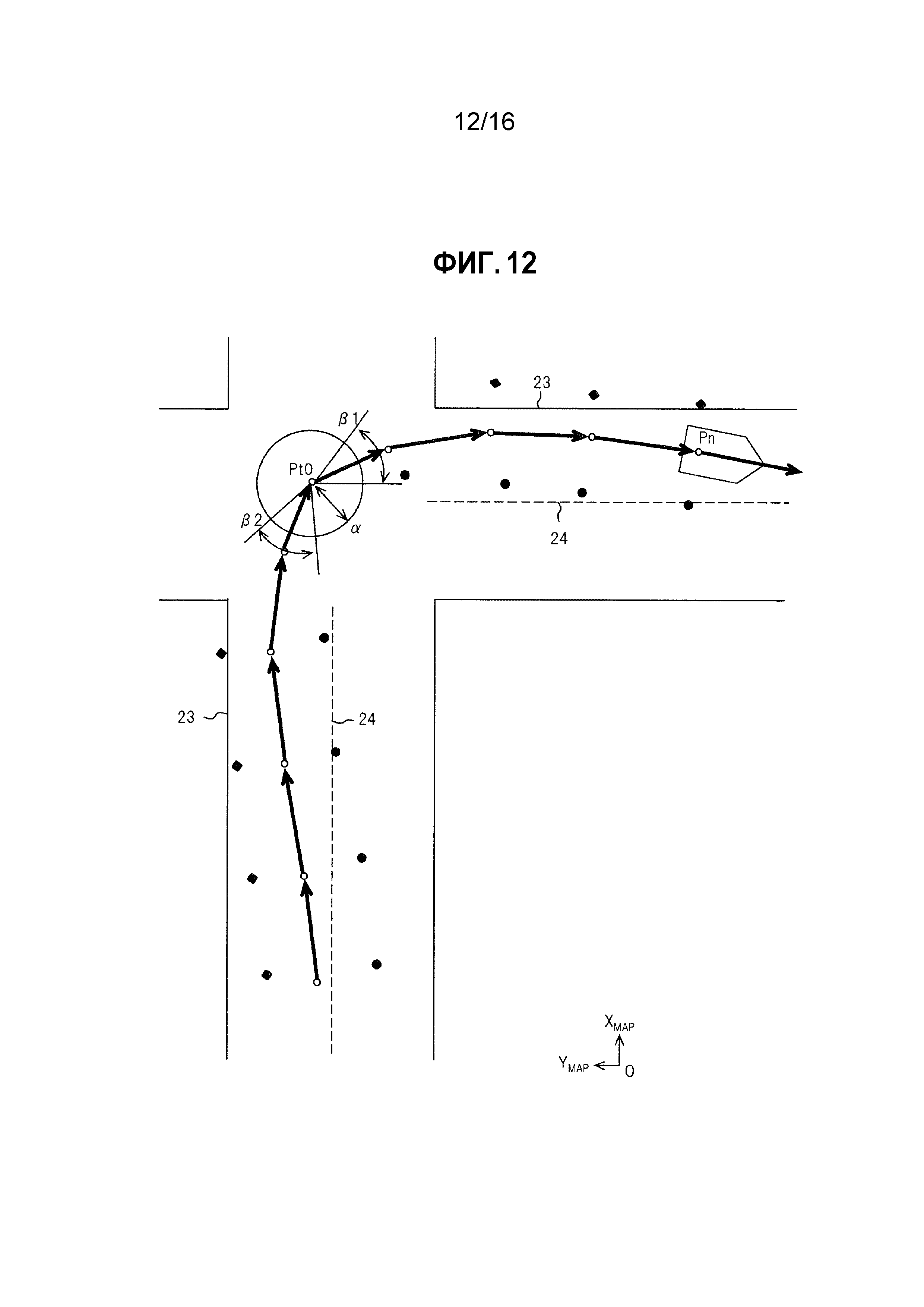
Фиг. 12 представляет собой схематическое изображение, иллюстрирующее данные о положении ориентира до корректировки;
Фиг. 13 представляет собой схематическое изображение, иллюстрирующее данные о положении ориентира после корректировки;
Фиг. 14 представляет собой блок-схему, иллюстрирующую процесс оценки положения транспортного средства;
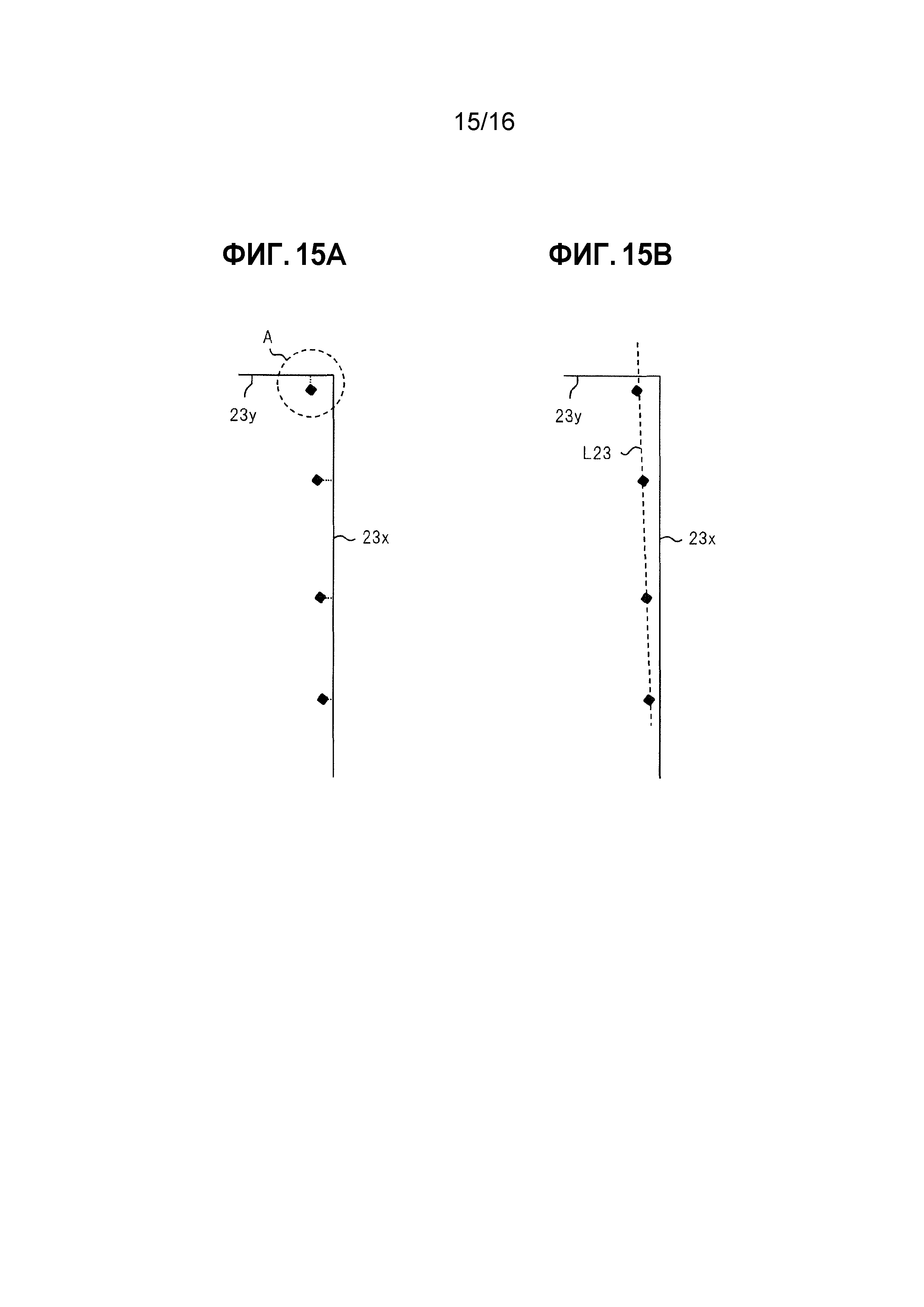
Фиг. 15A и 15B представляют собой схематические изображения, иллюстрирующие результат получения прямой линии; и
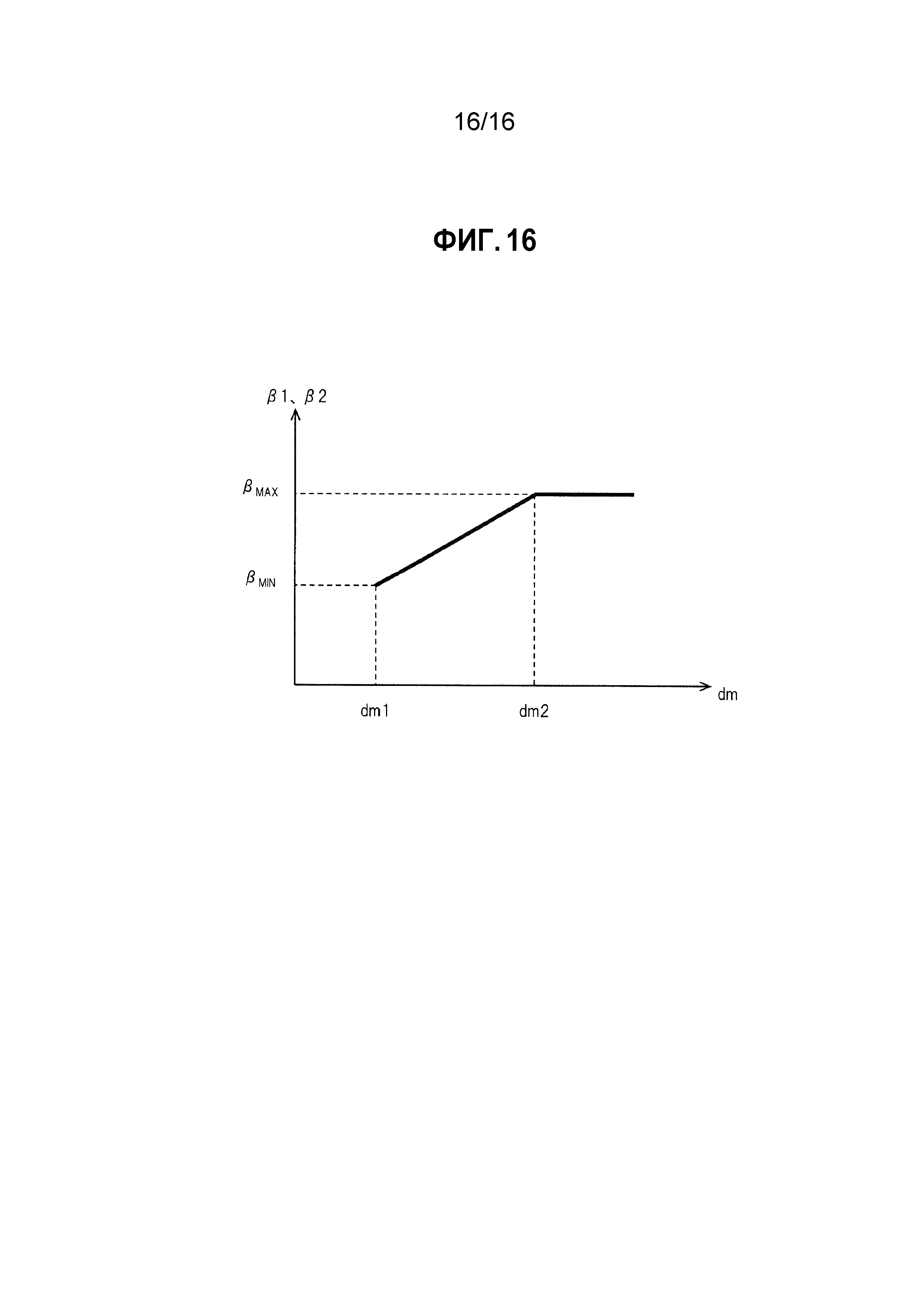
Фиг. 16 представляет собой график, используемый для установки допустимых диапазонов β1 и β2 в соответствии с расстоянием dm перемещения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0008] Далее будет описан вариант осуществления настоящего изобретения со ссылкой на чертежи. Отметим, что чертежи являются схематичными и иногда отличаются от фактических вариантов осуществления. В дополнение, следующий далее вариант осуществления описывает устройства и способы воплощения технической идеи настоящего изобретения путем примера и не ограничивает конфигурацию описанным ниже. Другими словами, техническая идея настоящего изобретения может быть подвергнута различным изменениям в пределах технического объема, описанного в формуле изобретения.
[0009] Первый вариант осуществления
Конфигурация
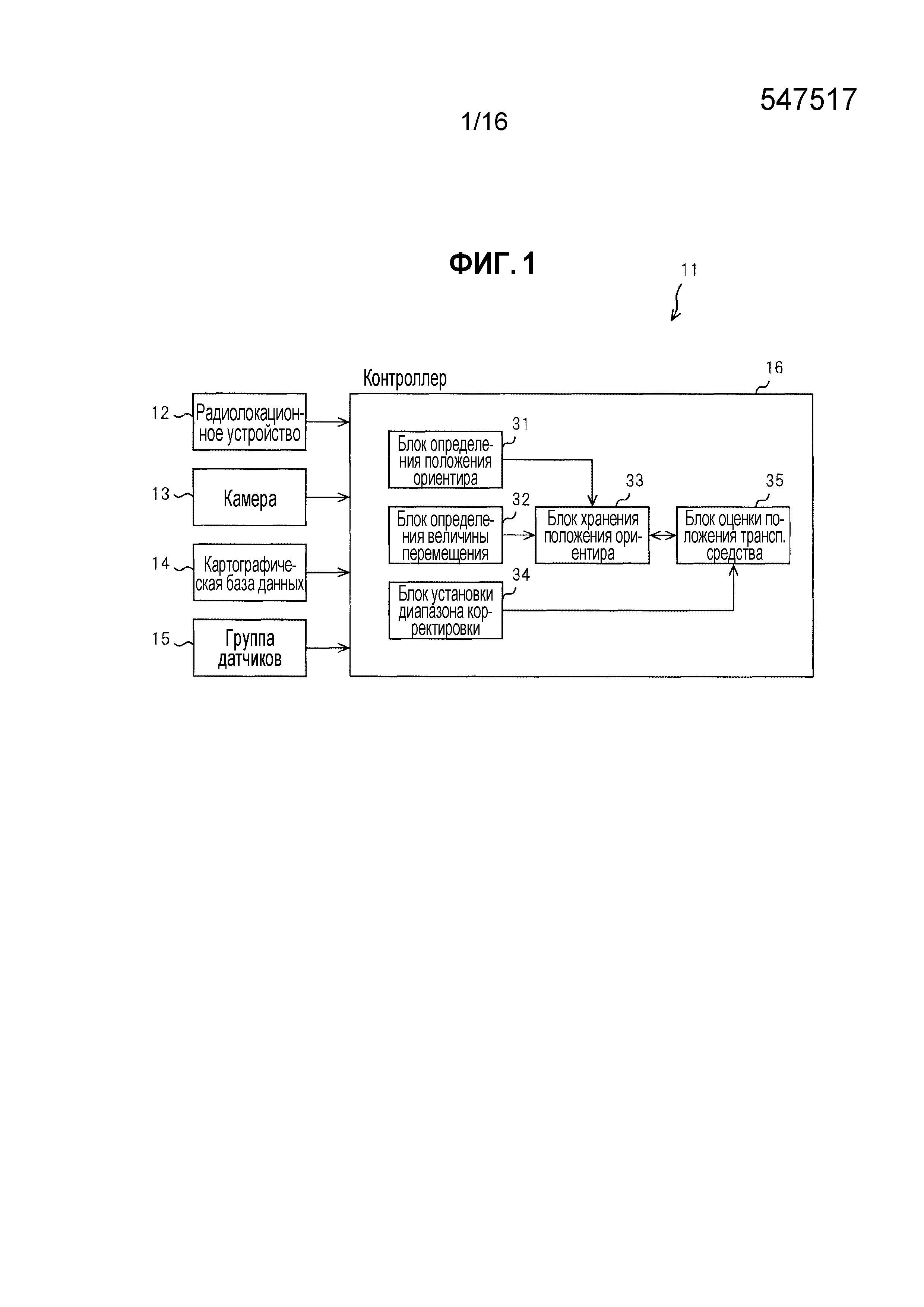
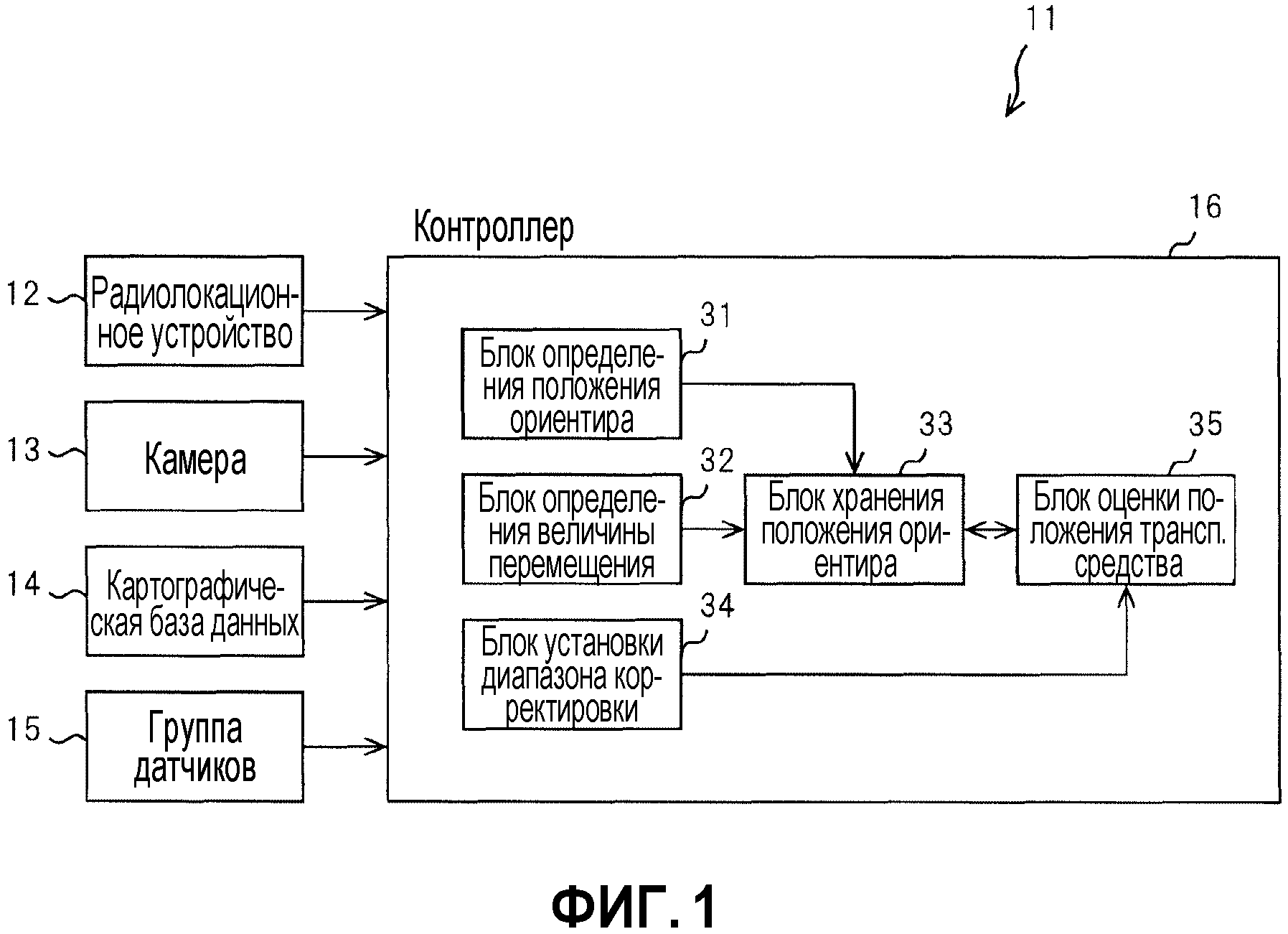
Фиг. 1 представляет собой конфигурационную схему устройства оценки положения транспортного средства.
Устройство 11 оценки положения транспортного средства представляет собой устройство, выполненное с возможностью оценки положения транспортного средства, и включает в себя радиолокационные устройства 12, камеры 13, картографическую базу 14 данных, группу 15 датчиков и контроллер 16.
Фиг. 2 представляет собой схематическое изображение, иллюстрирующее расположение радиолокационных устройств и камер.
Фиг. 3 представляет собой схематическое изображение, иллюстрирующее диапазоны сканирования радиолокационных устройств и диапазоны обзора камер.
[0010] Каждое радиолокационное устройство 12 имеет конфигурацию, включающую в себя, например, лазерный дальномер (LRF), измеряет направление и расстояние до объекта, который находится сбоку от транспортного средства 21, и выводит измеренные данные в контроллер 16. Радиолокационные устройства 12 расположены в двух местах, а именно на левой боковой поверхности и правой боковой поверхности транспортного средства 21. Когда два радиолокационных устройства 12 отличаются друг от друга, радиолокационные устройства, расположенные на левой боковой поверхности и правой боковой поверхности транспортного средства 21, называются левым радиолокационным устройством 12L и правым радиолокационным устройством 12R соответственно. Левое радиолокационное устройство 12L и правое радиолокационное устройство 12R выполняют сканирование в направлениях снизу влево и в направлениях снизу вправо соответственно. Другими словами, каждое из левого радиолокационного устройства 12L и правого радиолокационного устройства 12R имеет ось вращения в продольном направлении кузова транспортного средства и выполняет сканирование в направлениях под прямым углом к оси. В ходе этой операции определяются направления и расстояния до дорожной поверхности 22 и бордюра 23 сбоку от кузова транспортного средства. Бордюр 23 обеспечен на обочине дороги вдоль полосы движения в качестве границы между дорожным полотном и тротуаром.
[0011] Каждая камера 13 имеет конфигурацию, включающую в себя, например, широкоугольную камеру с использованием датчика изображения с зарядовой связью (CCD), захватывает боковую сторону транспортного средства 21 и выводит захваченные данные в контроллер 16. Камеры 13 расположены в двух местах, а именно на левом дверном зеркале и правом дверном зеркале транспортного средства 21. Когда две камеры 13 отличаются друг от друга, камеры, расположенные на левом дверном зеркале и правом дверном зеркале транспортного средства 21, называются левой камерой 13L и правой камерой 13R соответственно. Левая камера 13L и правая камера 13R захватывают дорожную поверхность 22 с левой стороны и с правой стороны от транспортного средства 21 соответственно. В ходе этой операции определяются линии 24 дорожной разметки сбоку от кузова транспортного средства. Линии 24 дорожной разметки представляют собой разделительные линии, например, белые линии, которые нанесены на дорожную поверхность 22 для обозначения полосы движения (полосы движения транспортного средства), по которой должно перемещаться транспортное средство 21, и которые проходят вдоль полосы движения. Отметим, что хотя в целях описания на Фиг. 3 проиллюстрированы трехмерные линии 24 дорожной разметки, предполагается, что линии 24 дорожной разметки выполнены заподлицо с дорожной поверхностью 22, так как их толщина на практике может считаться нулевой.
[0012] Картографическая база 14 данных получает информацию дорожных карт. В информацию дорожных карт входит информация о положении бордюра 23 и линий 24 дорожной разметки. Являясь объектом, имеющим высоту, бордюр 23 рассматривается как двумерные данные, если смотреть в плане. Бордюр 23 и линии 24 дорожной разметки закодированы в данные, которые представляют собой набор прямых линий, причем каждая прямая линия рассматривается как информация о положении обоих ее концевых точек, а дуговая кривая, которая изгибается, рассматривается как прямые линии, которые образуют ломаную линию, аппроксимирующую дуговую кривую. Отметим, что картографическая база 14 данных может представлять собой носитель данных, который хранит информацию дорожных карт для навигационной системы транспортного средства, или может получать картографическую информацию извне посредством системы связи, например, системы беспроводной связи (также применима связь между дорожной инфраструктурой и транспортным средством и связь между транспортными средствами). В этом случае картографическая база 14 данных может периодически получать последнюю картографическую информацию и обновлять сохраненную картографическую информацию. Картографическая база 14 данных также может сохранять маршруты, фактически пройденные транспортным средством, в качестве картографической информации.
[0013] Группа 15 датчиков включает в себя, например, GPS-приемник, датчик педали акселератора, датчик угла поворота рулевого колеса, датчик педали тормоза, датчик скорости транспортного средства, датчики ускорения, датчики скорости колес, датчик скорости рыскания и т.п., и выводит соответствующие обнаруженные данные в контроллер 16. GPS-приемник получает информацию о текущем местоположении транспортного средства 21. Датчик педали акселератора определяет величину нажатия педали акселератора. Датчик угла поворота рулевого колеса определяет величину поворота рулевого колеса. Датчик педали тормоза определяет величину нажатия педали тормоза и давление в усилителе тормозов. Датчик скорости транспортного средства определяет скорость транспортного средства. Датчики ускорения определяют ускорение/замедление в продольном направлении и боковое ускорение транспортного средства. Датчики скорости колес определяют скорости соответствующих колес. Датчик скорости рыскания определяет скорость рыскания транспортного средства.
[0014] Контроллер 16 имеет конфигурацию, включающую в себя, например, электронный блок управления (ECU), который включает в себя CPU, ROM, RAM и т.п., и в ROM записана программа, которая выполняет различные типы рабочих процессов, например, процесс оценки положения транспортного средства, который будет описан ниже. Отметим, что может быть обеспечен контроллер 16, специально предназначенный для процесса оценки положения транспортного средства, или другой контроллер может быть выполнен с возможностью работы в качестве контроллера для процесса оценки положения транспортного средства.
Контроллер 16 включает в себя, в качестве составных функциональных блоков, блок 31 определения положения ориентира, блок 32 определения величины перемещения, блок 33 хранения положения ориентира, блок 34 установки диапазона корректировки и блок 35 оценки положения транспортного средства.
[0015] Блок 31 определения положения ориентира определяет положения ориентиров на периферии транспортного средства, например, бордюра 23 и линий 24 дорожной разметки, как относительные положения относительно транспортного средства в системе координат транспортного средства, зафиксированной относительно транспортного средства.
Фиг. 4 представляет собой схематическое изображение, иллюстрирующее систему координат транспортного средства.
Система координат транспортного средства представляет собой двумерную систему координат, если смотреть в плане, и, например, середина задней колесной оси, продольное направление и правое и левое направления транспортного средства 21 считаются началом O координат, осью XVHC и осью YVHC соответственно. Формула, которая преобразует каждую из систем координат радиолокационных устройств 12 и систем координат камер 13 в систему координат транспортного средства получена заранее. В дополнение параметры дорожной поверхности 22 в системе координат транспортного средства известны заранее.
[0016] Дорожная поверхность 22 сканируется лазером по направлению к внешним сторонам в направлении ширины транспортного средства путем использования радиолокационных устройств 12, и положение, в котором в результате сканирования наблюдается большое изменение высоты (перепад высот), определяется как конечная точка со стороны дорожного полотна в направлении ширины бордюра 23. Другими словами, положение бордюра 23 определяется на основе трехмерных данных и проецируется на двумерную систему координат транспортного средства. На Фиг. 4 точка обнаружения бордюра 23 обозначена Pc и показана заштрихованным ромбом.
Путем захвата дорожной поверхности 22 с использованием камер 13 и путем получения на захваченных полутоновых изображениях образцов, на которых яркость изменяется с темного участка на яркий участок и с яркого участка на темный участок вдоль правого и левого направлений кузова транспортного средства, определяются линии 24 дорожной разметки. Например, определяются средние точки в направлении ширины линий 24 дорожной разметки. Другими словами, данные изображения, захваченные камерами 13, преобразуются посредством преобразования вида с высоты птичьего полета в изображения с высоты птичьего полета, на основе которых определяются линии 24 дорожной разметки и проецируются на систему координат транспортного средства. На Фиг. 4 точки обнаружения линий 24 дорожной разметки обозначены Pw и показаны заштрихованными кругами.
[0017] Блок 32 определения величины перемещения определяет одометрию, то есть величину перемещения транспортного средства 21 в единицу времени на основе различных типов информации, обнаруженной группой 15 датчиков. Объединение одометрий позволяет вычислять траекторию движения транспортного средства в системе координат одометрии.
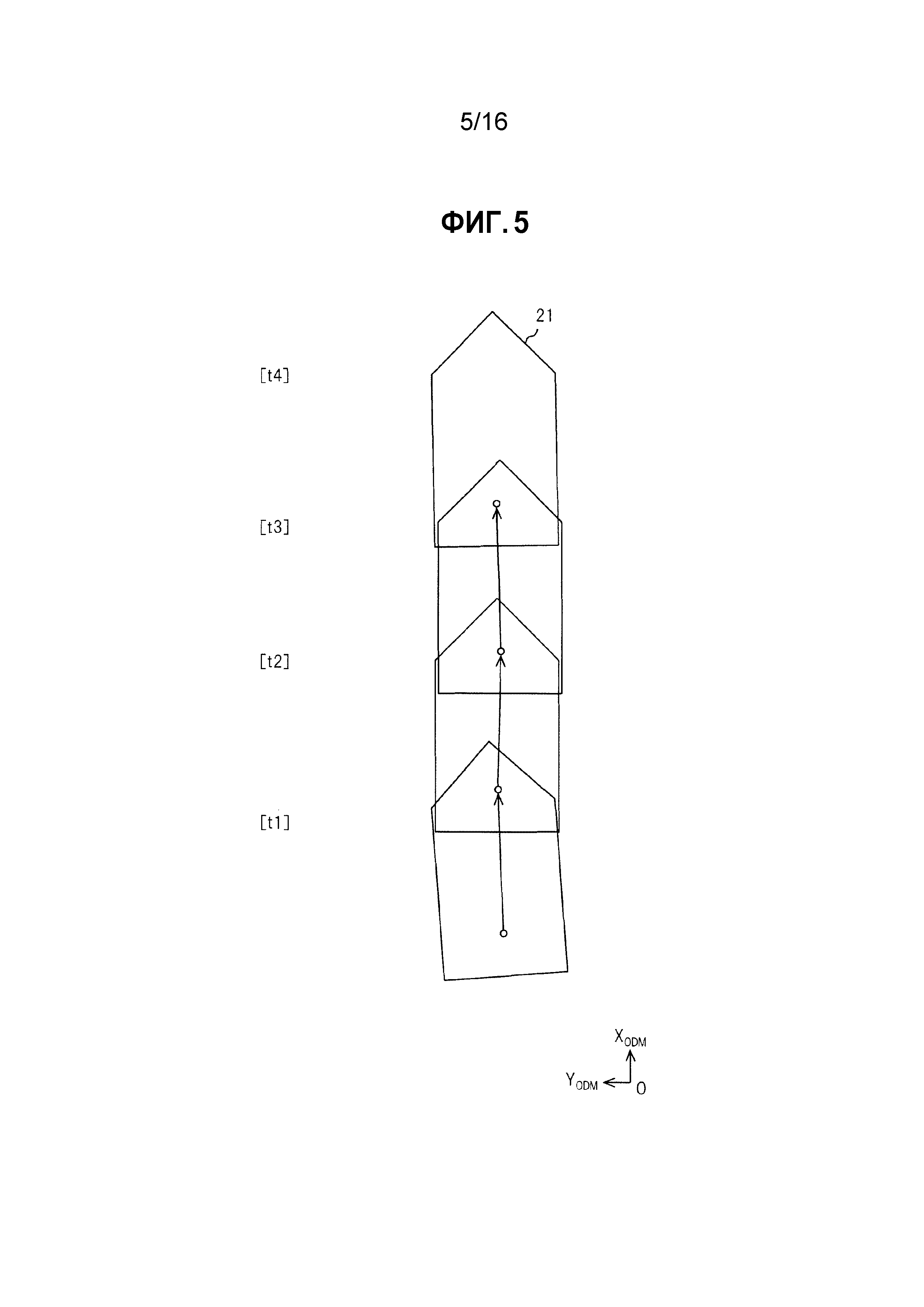
Фиг. 5 представляет собой схематическое изображение, иллюстрирующее систему координат одометрии.
Система координат одометрии принимает положение транспортного средства в момент времени, например, при включении или выключении питания системы, за начало координат, а угловое пространственное положение кузова транспортного средства (азимут) в момент времени за 0 градусов. Путем сохранения трех параметров транспортного средства, а именно координатных положений [XODM, YODM] и углового пространственного положения кузова транспортного средства [θODM], в системе координат одометрии в каждый рабочий цикл определяется траектория движения. На Фиг. 5 проиллюстрированы координатные положения и пространственные положения кузова транспортного средства в моменты времени t1-t4. Отметим, что с использованием текущего местоположения транспортного средства, установленного в начало координат, может каждый раз выполняться преобразование координат сохраненных данных о положении ориентира. Другими словами, может быть достаточно, чтобы данные о положении ориентира сохранялись в одной системе координат.
[0018] Блок 33 хранения положения ориентира хранит траекторию движения на основе величин перемещений, определенных блоком 32 определения величины перемещения, и положения ориентиров, определенные блоком 31 определения положения ориентира, в связи друг с другом в системе координат одометрии.
Фиг. 6 представляет собой схематическое изображение, иллюстрирующее положения ориентиров в системе координат транспортного средства.
На Фиг. 6 проиллюстрированы положения ориентиров в системе координат транспортного средства, определенные блоком 31 определения положения ориентира в моменты времени t1-t4. Что касается ориентиров, определены точки Pc обнаружения бордюра 23 с левой стороны от транспортного средства 21, точки Pw обнаружения одной из линий 24 дорожной разметки с левой стороны от транспортного средства 21 и точки Pw обнаружения другой из линий 24 дорожной разметки с правой стороны от транспортного средства 21. Положения соответствующих ориентиров в системе координат транспортного средства изменяются в зависимости от момента времени из-за смещения и изменения углового пространственного положения транспортного средства 21.
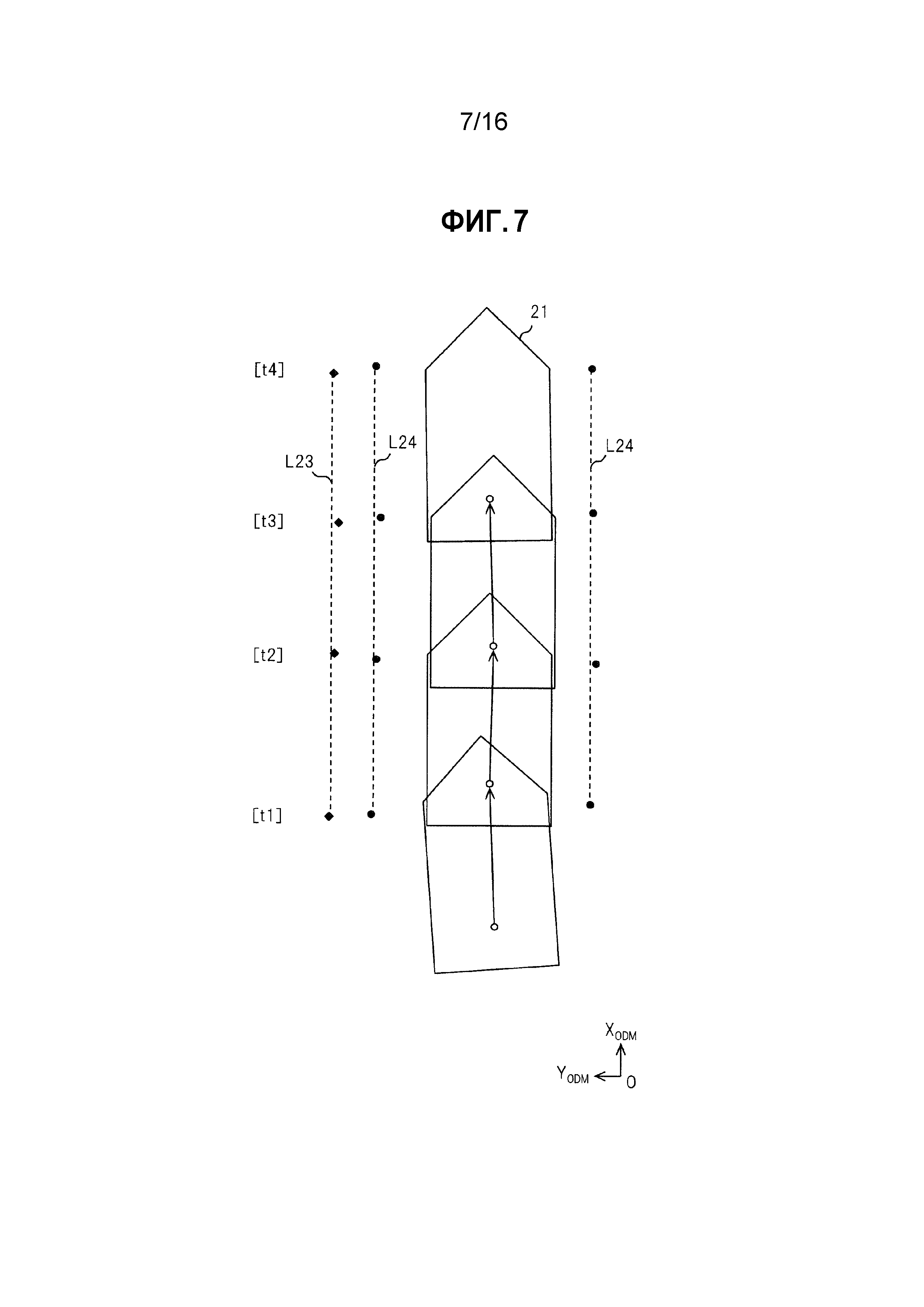
[0019] Фиг. 7 представляет собой схематическое изображение, на котором траектория движения на основе величин перемещений транспортного средства связана с положениями ориентиров.
Другими словами, соответствующие координатным положениям и угловым пространственным положениям кузова транспортного средства в моменты времени t1-t4 положения ориентиров в соответствующие моменты времени проецируются на систему координат одометрии. Другими словами, точки Pc обнаружения бордюра 23 с левой стороны от транспортного средства 21, точки Pw обнаружения одной из линий 24 дорожной разметки с левой стороны от транспортного средства 21 и точки Pw обнаружение другой из линий 24 дорожной разметки с правой стороны от транспортного средства 21 проецируются в соответствующие моменты времени.
[0020] Блок 33 хранения положения ориентира получает прямые линии, направленные вдоль полосы движения из группы точек, полученных в течение единичного интервала времени Δt, на ориентирах, последовательно обнаруженных блоком 31 определения положения ориентира. В частности, в системе координат одометрии вычисляются оптимальные параметры a, b и c в уравнении [aXODM+bYODM+c=0], представляющем прямую линию.
Если предполагается, что единичный интервал времени Δt составляет 0,2 секунды, радиолокационные устройства 12 работают с частотой 25 Гц, и камеры 13 работают с частотой 30 Гц, в течение единичного интервала времени Δt могут быть получены данные в пяти точках и данные в шести точках в отношении бордюра 23 и каждой линии 24 дорожной разметки соответственно. Предполагается, что нахождение каждого ориентира с левой стороны или с правой стороны от транспортного средства 21 определяется в зависимости от того, является ли координата YVHC ориентира в системе координат транспортного средства положительной или отрицательной. Таким образом, группа точек делится в зависимости от того, расположена ли каждая точка с правой стороны или с левой стороны от транспортного средства 21, а затем вычисляются параметры a, b и c.
[0021] Когда сумма расстояний между прямой линией и соответствующими точками обнаружения становится не меньше порогового значения, определяется, что прямая линия неопределима. С другой стороны, когда сумма расстояний между прямой линией и соответствующими точками обнаружения становится меньше порогового значения, определяется, что прямая линия определима. Две точки, которые обеспечивают максимальную длину между ними, выбираются из точек обнаружения, которые обеспечивают минимальное расстояние до прямой линии, и информация о двух точках вместе с моментами их получения сохраняется в блоке 33 хранения положения ориентира.
В этом случае прямая линия L23 получается из точек Pc обнаружения бордюра 23 с левой стороны от транспортного средства 21, обнаруженных в моменты времени t1-t4. В дополнение прямая линия L24 получается из точек Pw обнаружения одной из линий 24 дорожной разметки с левой стороны от транспортного средства 21, обнаруженных в моменты времени t1-t4. Кроме того, другая прямая линия L24 получается из точек Pw обнаружения другой линии 24 дорожной разметки с правой стороны от транспортного средства 21, обнаруженных в моменты времени t1-t4.
[0022] Блок 34 установки диапазона корректировки группирует части данных о положении ориентира, сохраненных в блоке 33 хранения положения ориентира, в группы в соответствии с состояниями поворота транспортного средства и на основе величин перемещений транспортного средства при определении данных о положении ориентира устанавливает диапазоны корректировки для групп.
Сначала определяется точка Pt поворота транспортного средства на основе траектории движения, основанной на величинах перемещений. В варианте осуществления точка Pt поворота определяется любым из следующих далее способов.
Фиг. 8A и 8B представляют собой схематические изображения, иллюстрирующие способы обнаружения точки Pt поворота.
На Фиг. 8A текущее местоположение Pn и точка Pr, полученная путем возврата из текущего местоположения Pn на заданное расстояние D1, соединены прямой линией L1. Исходя из этого в диапазоне возврата из текущего местоположения Pn на заданное расстояние D1 точка, расстояние d до которой от прямой линии L1 в направлении, перпендикулярном ей, не меньше заданного значения d1, которая максимально удалена от прямой линии L1, определена как точка Pt поворота.
[0023] На Фиг. 8B точка, в которой при возврате из текущего местоположения Pn угол θt поворота транспортного средства впервые становится не меньше заданного угла θ1, определена как точка Pt поворота. Угол θt поворота транспортного средства в системе координат одометрии представляет собой величину изменения углового пространственного положения до тех пор, пока не будет достигнуто текущее угловое пространственное положение кузова транспортного средства и, следовательно, угловая разница кузова транспортного средства с текущим направлением кузова транспортного средства, используемая в качестве контрольного угла. Заданный угол θ1 составляет, например, 60 градусов.
Затем данные о положении ориентира в точках в или после точки Pt поворота группируются в группу данных, называемую первой группой Gr1. В дополнение данные о положении ориентира в точках перед точкой Pt поворота группируются в другую группу данных, называемую второй группой Gr2.
[0024] Фиг. 9 представляет собой схематическое изображение, иллюстрирующее группирование.
На Фиг. 9 данные о положении ориентира от точки Pt поворота до текущего местоположения Pn и данные о положении ориентира в заданном диапазоне перед точкой Pt поворота группируются в первую группу Gr1 и вторую группу Gr2 соответственно.
Затем устанавливаются допустимый диапазон α и допустимые диапазоны β1 и β2 в корректировке положения (поперечное перемещение) и корректировке угла (поворот) сгруппированных данных о положении ориентира соответственно для сопоставления сгруппированных данных о положении ориентира с картографической информацией. Положения [xg, yg] сгруппированных данных о положении ориентира могут быть скорректированы по положению в пределах диапазона, имеющего радиус α с центром в точке Pt поворота в системе координат одометрии, и углы Φg сгруппированных данных о положении ориентира могут быть скорректированы по углу в пределах диапазонов β1 и β2 с центром вращения в точке Pt поворота в системе координат одометрии. Отметим, что допустимые диапазоны β1 и β2 могут быть установлены в одном и том же угловом диапазоне. В дополнение при выполнении корректировки в отношении только первой группы Gr1 может быть установлен только допустимый диапазон β1, тогда как допустимый диапазон β2 установлен на ноль, и при выполнении корректировки в отношении только второй группы Gr2 может быть установлен только допустимый диапазон β2, тогда как допустимый диапазон β1 установлен на ноль.
[0025] Прежде всего при увеличении расстояния перемещения в количестве перемещения транспортного средства более вероятно возникновение ошибки в информации одометрии. Таким образом, при увеличении расстояния dm перемещения допустимый диапазон α становится больше.
Фиг. 10 представляет собой график, используемый для установки допустимого диапазона α.
Абсцисса и ордината графика представляют расстояние dm перемещения в величине перемещения транспортного средства в данных о положении ориентира и допустимый диапазон α для корректировки положения соответственно. Что касается расстояния dm перемещения, значение dm1, которое больше 0, и значение dm2, которое больше dm1, определены заранее. Что касается допустимого диапазона α, значение αMIN, которое больше 0, и значение αMAX, которое больше αMIN, определены заранее. Когда расстояние dm перемещения находится в диапазоне от dm1 до dm2, чем больше расстояние dm перемещения, тем больше становится допустимый диапазон α в пределах диапазона от αMIN до αMAX. В дополнение, когда расстояние dm перемещения не меньше dm2, допустимый диапазон α сохраняется на αMAX.
[0026] При увеличении величины поворота в величине перемещения транспортного средства возникает более сильное боковое скольжение, что приводит к вероятному возникновению ошибки в информации одометрии из-за характеристик датчиков. Отметим, что большая величина поворота в величине перемещения транспортного средства означает меньший радиус R поворота. Таким образом, при уменьшении радиуса R поворота допустимые диапазоны β1 и β2 становятся больше.
Фиг. 11 представляет собой график, используемый для установки допустимых диапазонов β1 и β2 в соответствии с радиусом R поворота.
Абсцисса и ордината графика представляют радиус R поворота транспортного средства в данных о положении ориентира и допустимые диапазоны β1 и β2 в угловой корректировке. Что касается радиуса R поворота, значение R1, которое больше 0, и значение R2, которое больше R1, определены заранее. Что касается допустимых диапазонов β1 и β2, значение βMIN, которое больше 0, и значение βMAX, которое больше βMIN, определены заранее. Когда радиус R поворота не меньше R2, допустимые диапазоны β1 и β2 сохраняются на βMIN. Когда радиус R поворота находится в диапазоне от R2 до R1, чем меньше радиус R поворота, тем больше становятся допустимые диапазоны β1 и β2 в пределах диапазона от βMIN до βMAX.
[0027] Блок 35 оценки положения транспортного средства путем сопоставления данных о положении ориентира, сохраненных в блоке 33 хранения положения ориентира, с картографической информацией, сохраненной в картографической базе 14 данных, на основе диапазонов, установленных блоком 34 установки диапазона корректировки, оценивает положение транспортного средства 21 в системе координат карты.
Сначала при сопоставлении данных о положении ориентира с картографической информацией вычисляется расположение соответствующих групп, которое минимизирует ошибку сопоставления, в то время как данные о положении ориентира перемещаются в пределах диапазонов корректировки с точкой Pt поворота в качестве опорной точки. В ходе корректировки при сохранении относительных позиционных взаимосвязей между данными о положении ориентира в соответствующей группе относительная взаимосвязь между группами корректируется с точкой Pt поворота в качестве опорной точки. Другими словами, хотя элементы данных в соответствующих из первой группы Gr1 и второй группы Gr2 не перемещаются в пределах групп, каждая из первой группы Gr1 и второй группы Gr2 перемещается и поворачивается как одно целое. При сопоставлении сгруппированных данных о положении ориентира с картографической информацией прямые линии L23 получаются на основе точек Pc обнаружения бордюров 23, а прямые линии L24 получаются на основе точек Pw обнаружения линий 24 дорожной разметки, как описано выше, а затем с использованием этих прямых линий L23 и L24 данные о положении ориентира сопоставляются с картографической информацией.
[0028] Фиг. 12 представляет собой схематическое изображение, иллюстрирующее данные о положении ориентира до корректировки.
Система координат карты представляет собой двумерную систему координат, если смотреть в плане, и предполагается, что направление восток-запад и направление север-юг соответствуют оси XMAP и оси YMAP соответственно. Угловое пространственное положение кузова транспортного средства (азимут) представлено углом против часовой стрелки, причем 0 градусов является направлением на восток. На Фиг. 12 проиллюстрирована ситуация, в которой транспортное средство выполнило поворот направо на перекрестке. Как до, так и после поворота направо точки обнаружения бордюров, обозначенные заштрихованными ромбами, и точки обнаружения линий дорожной разметки, обозначенные заштрихованными кругами, отличаются от соответствующих положений бордюров 23 и линий 24 дорожной разметки в системе координат карты соответственно. На Фиг. 12 также проиллюстрированы допустимые диапазоны, в пределах которых могут быть скорректированы данные о положении ориентира, и данные о положении ориентира относительно каждой группы могут быть скорректирован по положению и скорректированы по углу в пределах диапазона, имеющего радиус α, и диапазонов β1 и β2 соответственно с центром в точке Pt0 поворота до корректировки.
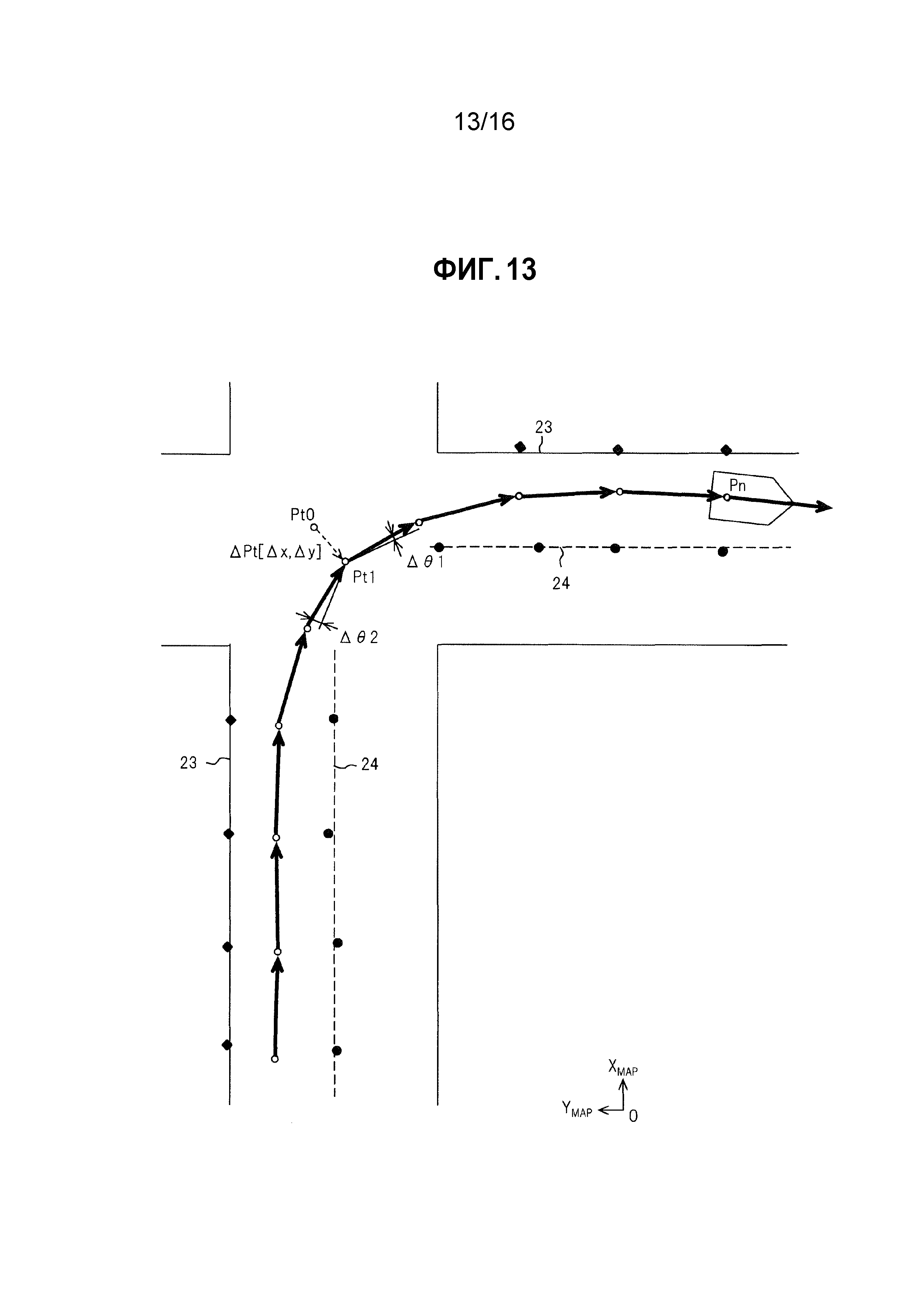
[0029] Фиг. 13 представляет собой схематическое изображение, иллюстрирующее данные о положении ориентира после корректировки.
В этом примере сгруппированные данные о положении ориентира сопоставляются с картографической информацией с точкой Pt поворота в качестве опорной точки. Другими словами, расположение соответствующих групп корректируется с точкой Pt поворота в качестве опорной точки так, что позиционные смещения точек обнаружения бордюров и точек обнаружения линий дорожной разметки от соответствующих положений бордюров 23 и линий 24 дорожной разметки в системе координат карты минимизируются. Сначала точка поворота корректируется по положению с Pt0 на Pt1, и величина корректировки при корректировке составляет ΔPt[Δx, Δy], что находится в допустимом диапазоне α. В дополнение, группа данных о положении ориентира в и после точки Pt1 поворота корректируется по углу с центром вращения в точке Pt1 поворота, и величина корректировки при корректировке составляет Δθ1, что находится в допустимых диапазонах β1 и β2. Подобным образом, группа данных о положении ориентира перед точкой Pt1 поворота также корректируется с центром вращения в точке Pt1 поворота, и величина корректировки при корректировке составляет Δθ2, что находится в допустимых диапазонах β1 и β2. Вышеуказанная корректировка приводит к тому, что точки обнаружения бордюров и точки обнаружения линий дорожной разметки как в данных о положении ориентира до поворота направо, так и в данных о положении ориентира после поворота направо по существу совпадают с соответствующими положениями бордюров 23 и линий 24 дорожной разметки в системе координат карты.
[0030] Как описано выше, после сопоставления данных о положении ориентира, сохраненных в блоке 33 хранения положения ориентира, с картографической информацией, сохраненной в картографической базе 14 данных, блок 35 оценки положения транспортного средства оценивает положение транспортного средства 21 в системе координат карты.
Система координат карты представляет собой двумерную систему координат, если смотреть в плане, и предполагается, что направление восток-запад и направление север-юг соответствуют оси XMAP и оси YMAP соответственно. Угловое пространственное положение кузова транспортного средства (азимут) представлено углом против часовой стрелки, причем 0 градусов является направлением на восток. В системе координат карты оцениваются три параметра, а именно координатные положения [XMAP, YMAP] и угловое пространственное положение [θMAP] кузова транспортного средства. Для сопоставления (картографического сопоставления), например, используется итеративный алгоритм ближайших точек (ICP). При сопоставлении прямых линий друг с другом конечные точки на обоих концах прямых линий сопоставляются друг с другом в качестве точек оценки, и когда пространство между конечными точками на обоих концах является большим, точки в пространстве могут быть интерполированы.
[0031] Если степень соответствия при сопоставлении является высокой, когда блок 35 оценки положения транспортного средства корректирует данные о положении ориентира в пределах допустимых диапазонов, блок 33 хранения положения ориентира корректирует (обновляет) сохраненные данные о положении ориентира в соответствии с данными о положении ориентира после корректировки. С другой стороны, если степень соответствия при сопоставлении является низкой, когда блок 35 оценки положения транспортного средства корректирует данные о положении ориентира в пределах допустимых диапазонов, блок 33 хранения положения ориентира оставляет сохраненные данные о положении ориентира, то есть данные о положении ориентира до корректировки.
[0032] Далее будет описан процесс оценки положения транспортного средства, который выполняется контроллером 16 в каждом заданном интервале времени (например, 10 мс).
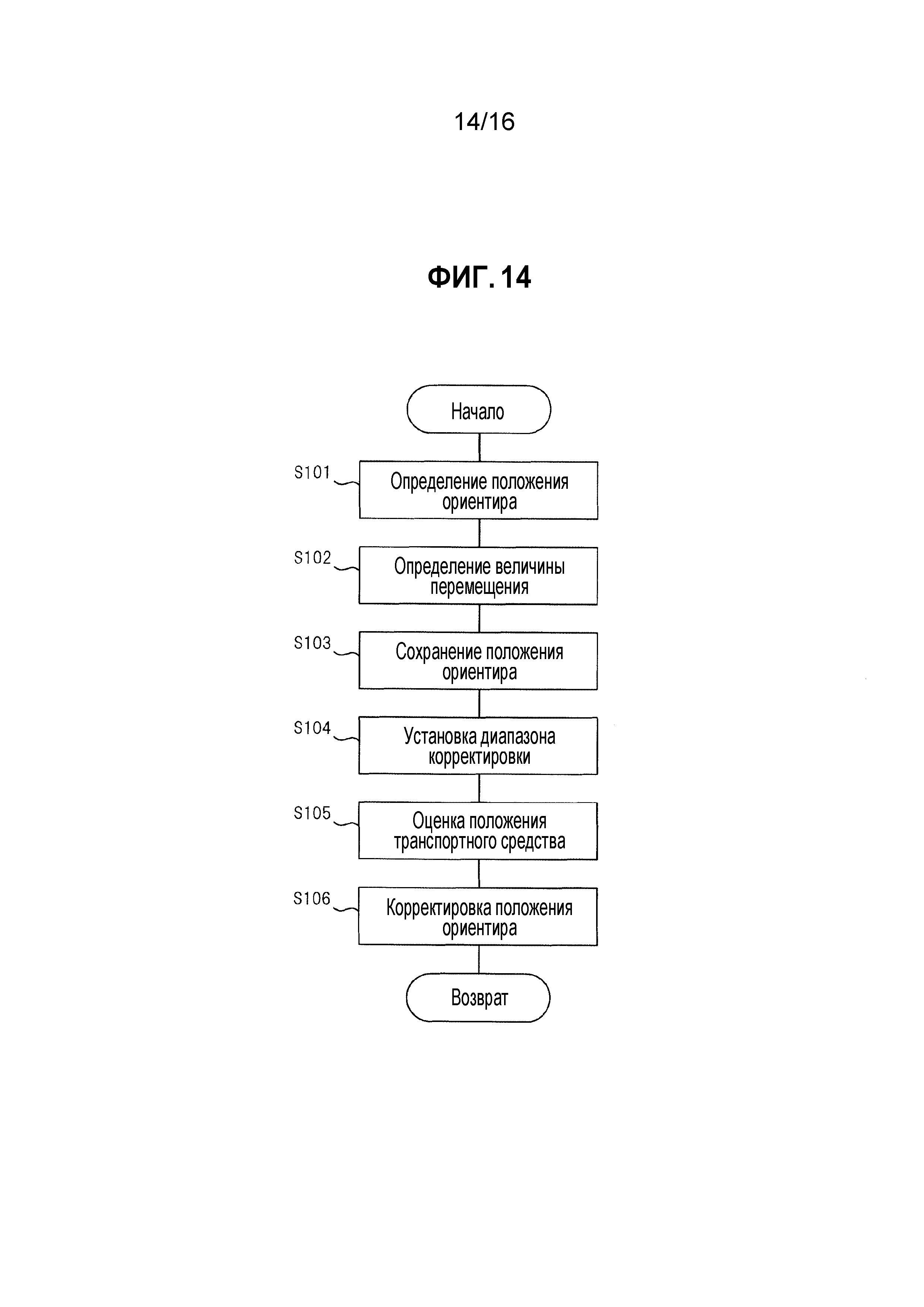
Фиг. 14 представляет собой блок-схему, иллюстрирующую процесс оценки положения транспортного средства.
Первый этап S101 соответствует процессу, выполняемому блоком 31 определения положения ориентира, в котором определяются положения ориентиров на периферии транспортного средства, например, бордюра 23 и линий 24 дорожной разметки, как относительные положения относительно транспортного средства в системе координат транспортного средства, зафиксированной относительно транспортного средства. Другими словами, в системе координат транспортного средства определяются точки Pc обнаружения бордюра 23, обнаруженные радиолокационными устройствами 12, и точки Pw обнаружения линий 24 дорожной разметки, обнаруженные камерами 13.
[0033] Следующий этап S102 соответствует процессу, выполняемому блоком 32 определения величины перемещения, в котором определяются одометрии, каждая из которых представляет собой величину перемещения транспортного средства 21 в единицу времени, на основе различных типов информации, обнаруженной группой 15 датчиков. Объединение одометрий позволяет вычислять траекторию движения транспортного средства в системе координат одометрии. Другими словами, три параметра транспортного средства, а именно координатные положения [XODM, YODM] и угловое пространственное положение кузова транспортного средства [θODM], сохраняются в системе координат одометрии в каждом рабочем цикле.
Следующий этап S103 соответствует процессу, выполняемому блоком 33 хранения положения ориентира, в котором траектория движения на основе величин перемещений, определенных блоком 32 определения величины перемещения, и положения ориентиров, определенные блоком 31 определения положения ориентира, сохраняются в связи друг с другом в системе координат одометрии. Другими словами, данные о положении ориентира, обнаруженные в соответствующие моменты времени, перемещаются на величины перемещений транспортного средства в течение прошедших моментов времени от соответствующих моментов времени до настоящего момента времени, и соответствующие координатным положениям и угловым пространственным положениям кузова транспортного средства в соответствующие моменты времени, соответствующие данные о положении бордюра 23, линий 24 дорожной разметки и т.п. проецируются на систему координат одометрии и сохраняются.
[0034] Следующий этап S104 соответствует процессу, выполняемому блоком 34 установки диапазона корректировки, в котором части данных о положении ориентира, сохраненные в блоке 33 хранения положения ориентира, группируются в группы в соответствии с состояниями поворота транспортного средства, и на основе величин перемещений транспортного средства при определении данных о положении ориентира устанавливаются диапазоны корректировки для групп. Сначала определяется точка Pt поворота транспортного средства на основе траектории движения, и данные о положении ориентира в точках в или поле точки Pt поворота группируются в первую группу Gr1. В дополнение, данные о положении ориентира в точках перед точкой Pt поворота группируются во вторую группу Gr2. Затем устанавливаются допустимый диапазон α и допустимые диапазоны β1 и β2 в корректировке по положению и корректировке по углу сгруппированных данных о положении ориентира соответственно в соответствии с картографической информацией.
[0035] Следующий этап S105 соответствует процессу, выполняемому блоком 35 оценки положения транспортного средства, в котором путем сопоставления сохраненных данных о положении ориентира с соответствующими положениями ориентиров в картографической информации на основе диапазонов корректировки оценивается положение транспортного средства 21 в системе координат карты. Сначала при сопоставлении данных о положении ориентира с соответствующими положениями ориентиров в картографической информации вычисляется расположение соответствующих групп, которое минимизирует ошибку сопоставления, в то время как данные о положении ориентира перемещаются в пределах диапазонов корректировки с точкой Pt поворота в качестве опорной точки, а затем оценивается положение транспортного средства 21 в системе координат карты. Другими словами, в системе координат карты оцениваются три параметра, а именно координатные положения [XMAP, YMAP] и угловое пространственное положение [θMAP] кузова транспортного средства.
[0036] Следующий этап S106 соответствует процессу, выполняемому блоком 33 хранения положения ориентира, в котором данные о положении ориентира обновляются соответствующим образом, а затем процесс возвращается к заданной основной программе. Другими словами, при корректировке блоком 35 оценки положения транспортного средства данных о положении ориентира в пределах допустимых диапазонов оценивается степень соответствия при сопоставлении. Когда степень соответствия является высокой, сохраненные данные о положении ориентира корректируются (обновляются) в соответствии с данными о положении ориентира после корректировки. С другой стороны, когда степень соответствия является низкой, остаются ранее сохраненные данные о положении ориентира без корректировки (обновления) данных о положении ориентира, то есть данные о положении ориентира до корректировки.
Выше описан процесс оценки положения транспортного средства.
[0037] Функционирование
Путем сопоставления положений ориентиров, например, бордюра 23, обнаруженного радиолокационными устройствами 12, и линий 24 дорожной разметки, обнаруженных камерами 13, с положениями соответствующих ориентиров, заранее закодированными в данные в качестве картографической информации, оценивается положение транспортного средства 21. Настоящий вариант осуществления иллюстрирует способ, в котором картографическая информация создается только с использованием ориентиров, например, бордюра 23 и линий 24 дорожной разметки, обнаружение которых проще по сравнению с другими ориентирами, и которые могут быть описаны в виде двумерных данных, если смотреть в плане, и оценка положения транспортного средства выполняется с использованием картографической информации. Отметим, что, когда должна быть получена более высокая точность оценки положений транспортного средства, может быть использована картографическая информация, содержащая трехмерные (длина, ширина и высота) данные о конструкциях. В этом случае также может быть применен настоящий вариант осуществления.
[0038] Сохранение определенной величины предыдущей траектории движения в системе координат одометрии путем использования информации о перемещении транспортного средства 21 и сопоставление системы координат одометрии, на которую проецируются данные о положении ориентира, с системой координат карты, в которой заранее сохранены положения ориентиров, позволяют оценивать положение транспортного средства. Однако существует проблема, заключающаяся в том, что в системе координат одометрии, чем больше расстояние перемещения, и чем больше величина поворота, тем больше становится суммарная ошибка. Фиг. 12 представляет собой схематическое изображение, иллюстрирующее данные о положении ориентира до корректировки. В этой сцене при выполнении транспортным средством поворота направо величина поворота увеличивается, и возникает ошибка одометрии, что приводит к вычислению траектории движения так, как будто транспортное средство выполнило больший поворот, чем фактический поворот, и форма дороги, которую определяют данные о положении ориентира, сохраненные в соответствии с вычисленной траекторией движения, смещается относительно фактической формы дороги.
По этой причине при сопоставлении формы дороги, которую определяют данные о положении ориентира, сохраненные неизменными, с формой дороги в картографической информации степень соответствия уменьшается, и минимальная ошибка увеличивается, что делает невозможной оценку положения транспортного средства с высокой точностью. Таким образом, в системе координат одометрии положение транспортного средства оценивается путем сопоставления групп по меньшей мере частей данных о положении ориентира, в которых траектория движения и положения ориентиров сохранены в связи друг с другом, с положениями ориентиров в картографической информации при корректировке положения и угла между группами.
[0039] Далее будет описана конкретная процедура.
Сначала определяются положения ориентиров, например, бордюров 23 и линий 24 дорожной разметки, вдоль полосы движения в системе координат транспортного средства (этап S101), и путем объединения различных типов информации, обнаруженной группой 15 датчиков, определяется траектория движения транспортного средства в системе координат одометрии (этап S102). Определенная траектория движения и определенные положения ориентиров сохраняются в связи друг с другом в системе координат одометрии (этап S103).
[0040] Части сохраненных данных о положении ориентира группируются в соответствии с состояниями поворота транспортного средства, и на основе величин перемещений транспортного средства при определении данных о положении ориентира устанавливаются диапазоны корректировки для групп (этап S104). На этом этапе сначала определяется точка Pt поворота транспортного средства на основе траектории движения. Например, текущее местоположение Pn и точка Pr, полученная путем возврата из текущего местоположения Pn на заданное расстояние D1, соединяются прямой линией L1, и в диапазоне возврата из текущего местоположения Pn на заданное расстояние D1 точка, расстояние d до которой от прямой линии L1 в направлении, перпендикулярном ей, не меньше заданного значения d1, которая максимально удалена от прямой линии L1, определяется как точка Pt поворота. Альтернативно, точка, в которой при возврате из текущего местоположения Pn угол θt поворота транспортного средства впервые становится не меньше заданного угла θ1, определяется как точка Pt поворота. Как описано выше, использование расстояния d от прямой линии L1 и угла θt поворота позволяет легко определять точку Pt поворота транспортного средства.
[0041] Путем группирования данных о положении ориентира в точках в или после точки Pt поворота устанавливается первая группа Gr1, и наряду с этим путем группирования данных о положении ориентира в точках перед точкой Pt поворота устанавливается вторая группа Gr2. В дополнение, устанавливаются допустимый диапазон α и допустимые диапазоны β1 и β2 в корректировке по положению и корректировке по углу сгруппированных данных о положении ориентира соответственно для сопоставления данных о положении ориентира с картографической информацией. В ходе установки при увеличении расстояния dm перемещения в величине перемещения транспортного средства в сохраненных данных о положении ориентира допустимый диапазон α становится больше, и при увеличении величины поворота в величине перемещения транспортного средства (при уменьшении радиуса поворота) допустимые диапазоны β1 и β2 становятся больше.
[0042] Путем сопоставления сохраненных данных о положении ориентира с картографической информацией на основе диапазонов α, β1 и β2 корректировки с точкой Pt поворота в качестве опорной точки оценивается положение транспортного средства 21 в системе координат карты (этап S105). Другими словами, поскольку при перемещении данных о положении ориентира в пределах диапазонов корректировки с точкой Pt поворота в качестве опорной точки относительно картографической информации, вычисляется расположение соответствующих групп, которое минимизирует ошибку сопоставления, а затем оценивается положение транспортного средства 21, влияние суммарной ошибки в информации одометрии может быть предотвращено, и точность оценки положения транспортного средства может быть улучшена. Другими словами, поскольку вышеописанный процесс эквивалентен сопоставлению данных о положении ориентира с картографической информацией с точкой Pt поворота в качестве опорной точки с тремя степенями свободы, а именно положениями [xg, yg] и углом Φg сгруппированных данных о положении ориентира, точность оценки координатных положений [XMAP, YMAP] и угловых пространственных положений [θMAP] кузова транспортного средства может быть улучшена.
[0043] Поскольку, в частности, во время поворота, происходит боковое скольжение транспортного средства, вероятно появление ошибки в информации одометрии. В связи с этим обнаружение точки Pt поворота, группирование данных о положении ориентира в группы в точках в и после точки Pt поворота и перед точкой Pt поворота и корректировка положения и корректировка угла каждой группы с точкой Pt поворота в качестве опорной точки, как описано выше, позволяют эффективно исключать ошибку в информации одометрии. С другой стороны, поскольку корректировка данных о положении ориентира выполняется в пределах допустимых диапазонов α, β1 и β2 с точкой Pt поворота в качестве опорной точки, может быть предотвращено чрезмерное перемещение, и корректировка может быть выполнена в пределах надлежащего диапазона. Поскольку при увеличении расстояния dm перемещения ошибка в информации одометрии становится больше, установка допустимого диапазона α в соответствии с расстоянием dm перемещения и установка допустимых диапазонов β1 и β2 в соответствии с величиной поворота в величине перемещения транспортного средства позволяет устанавливать надлежащие допустимые диапазоны α, β1 и β2 и выполнять эффективную корректировку положения и корректировку угла.
[0044] При сопоставлении групп сгруппированных данных о положении ориентира с картографической информацией при корректировке положения и угла между группами прямые линии L23 и прямые линии L24 получаются на основе точек Pc обнаружения бордюров 23 и точек Pw обнаружения линий 24 дорожной разметки в группах соответственно, а затем с использованием этих прямых линий L23 и L24 данные о положении ориентира сопоставляются с картографической информацией.
Фиг. 15A и 15B представляют собой схематические изображения, иллюстрирующие результат получения прямой линии.
Фиг. 15A иллюстрирует случай, в котором точки Pc обнаружения бордюров 23, обозначенные заштрихованными ромбами, сопоставляются с картографической информацией, как есть, без получения прямой линии. Точка Pc обнаружения в области A, которая должна сопоставляться с линией, представляющей бордюр 23x, сопоставляется с линией, представляющей бордюр 23y, которая расположена наиболее близко к точке Pc обнаружения. Фиг. 15B иллюстрирует случай, в котором получение прямой линии L23 позволяет сопоставлять точку Pc обнаружения с линией, представляющей бордюр 23x. Как описано выше, получение прямых линий и сопоставление данных о положении ориентира с картографической информацией путем использования прямых линий позволяет повышать точность оценки положения транспортного средства.
[0045] Если степень соответствия при сопоставлении является высокой, когда данные о положении ориентира корректируются в пределах допустимых диапазонов, сохраненные данные о положении ориентира корректируются (обновляются) в соответствии с данными о положении ориентира после корректировки (этап S106). Корректировка позволяет сохранять данные о положении ориентиров с высокой точностью. Наоборот, когда степень соответствия является низкой, остаются сохраненные данные о положении ориентира, то есть данные о положении ориентира до корректировки. Эта операция позволяет предотвращать возникновение ситуации, в которой сохраняются данные о положении ориентира с низкой точностью.
[0046] Вариант
Хотя в первом варианте осуществления данные о положении ориентира в точках в или после точки Pt поворота группируются в одну группу данных, и наряду с этим данные о положении ориентира в точках перед точкой Pt поворота группируются в другую группу данных, и корректируется соответствующая группа данных о положении ориентира, настоящее изобретение не ограничивается этой конфигурацией. Другими словами, если в момент времени до прохождения точки Pt поворота данные о положении ориентира в точках перед точкой Pt поворота уже скорректированы путем сопоставления с картографической информацией, нет необходимости дополнительного выполнения корректировки путем сопоставления с картографической информацией после прохождения точки Pt поворота. В связи с этим по меньшей мере данные о положении ориентира в точках в или после точки Pt поворота могут быть сгруппированы в группу, и при корректировке положения и угла группы с точкой Pt поворота в качестве опорной точки группа может сопоставляться с картографической информацией. Другими словами, вторая группа Gr2, которая представляет собой группу данных о положении ориентира в точках перед точкой Pt поворота, зафиксирована, и только первая группа Gr1, которая представляет собой группу данных о положении ориентира в точках в или после точки Pt поворота, может корректироваться. Эта конфигурация позволяет предотвращать рабочую нагрузку и более эффективно выполнять сопоставление.
[0047] Пример применения
Хотя в первом варианте осуществления допустимые диапазоны β1 и β2 в корректировке угла устанавливаются в соответствии с величиной поворота в величине перемещения транспортного средства, настоящее изобретение не ограничивается этой конфигурацией. Поскольку при возникновении изменения скорости транспортного средства вероятно появление ошибки в информации одометрии из-за характеристик датчиков, и при увеличении расстояния перемещения ошибка дополнительно увеличивается, допустимые диапазоны β1 и β2 в корректировке угла могут быть установлены в соответствии с расстоянием dm перемещения транспортного средства.
Фиг. 16 представляет собой график, используемый для установки допустимых диапазонов β1 и β2 в соответствии с расстоянием dm перемещения.
Абсцисса и ордината графика представляют расстояние dm перемещения в величине перемещения транспортного средства в данных о положении ориентира и допустимые диапазоны β1 и β2 в корректировке угла соответственно. Что касается расстояния dm перемещения, значение dm1, которое больше 0, и значение dm2, которое больше dm1, определены заранее. Что касается допустимых диапазонов β1 и β2, значение βMIN, которое больше 0, и значение βMAX, которое больше βMIN, определены заранее. Когда расстояние dm перемещения находится в диапазоне от dm1 до dm2, чем больше расстояние dm перемещения, тем больше становится допустимый диапазон β в пределах диапазона от βMIN до βMAX. В дополнение, когда расстояние dm перемещение не меньше dm2, допустимые диапазоны β1 и β2 сохраняются на βMAX.
Установка допустимых диапазонов β1 и β2 в корректировке угла в соответствии с расстоянием dm перемещения, как описано выше, позволяет устанавливать надлежащие допустимые диапазоны β1 и β2 и выполнять эффективную корректировку угла.
Отметим, что допустимые диапазоны β1 и β2 могут быть установлены с учетом как величины поворота, так и расстояния dm перемещения в величине перемещения транспортного средства в данных о положении ориентира. В дополнение, ускорение/замедление также может учитываться в качестве величины перемещения транспортного средства.
[0048] Взаимосвязи соответствия
В первом варианте осуществления блок 31 определения положения ориентира и процесс на этапе S101 соответствуют «блоку определения положения ориентира». Блок 32 определения величины перемещения и процесс на этапе S102 соответствуют «блоку определения траектории движения». Блок 33 хранения положения ориентира и процесс на этапах S103 и S106 соответствуют «блоку хранения данных о положении ориентира». Картографическая база 14 данных соответствует «блоку хранения картографической информации». Блок 34 установки диапазона корректировки и процесс на этапе S104 соответствуют «блоку корректировки данных о положении ориентира». Блок 35 оценки положения транспортного средства и процесс на этапе S105 соответствуют «блоку оценки положения транспортного средства».
[0049] Полезные эффекты
Далее будут описаны полезные эффекты изобретения, достигаемые основной частью первого варианта осуществления.
(1) Устройство оценки положения транспортного средства в соответствии с первым вариантом осуществления определяет положения ориентира на периферии транспортного средства и наряду с этим определяет величины перемещений транспортного средства и сохраняет положения ориентира в качестве данных о положении ориентира на основе величин перемещений. В дополнение, устройство оценки положения транспортного средства группирует часть данных о положении ориентира в группу в соответствии с состояниями поворота транспортного средства и на основе величин перемещений транспортного средства при определении данных о положении ориентира устанавливает диапазон корректировки для группы. Кроме того, устройство оценки положения транспортного средства получает картографическую информацию, включающую в себя положения ориентира, и путем сопоставления данных о положении ориентира с положениями ориентира в картографической информации на основе установленного диапазона корректировки оценивает положение транспортного средства.
Поскольку, как описано выше, положение транспортного средства оценивается путем сопоставления данных о положении ориентира с картографической информацией при корректировке данных о положении ориентира в пределах диапазона корректировки, точность оценки положения транспортного средства может быть улучшена.
[0050] (2) Устройство оценки положения транспортного средства в соответствии с первым вариантом осуществления устанавливает диапазон корректировки в качестве диапазона положений и диапазона углов между группами.
Корректировка положения и угла между группами, как описано выше, позволяет предотвращать влияние ошибки в информации одометрии.
[0051] (3) Устройство оценки положения транспортного средства в соответствии с первым вариантом осуществления при увеличении величины перемещения транспортного средства в сохраненных данных о положении ориентира увеличивает допустимые диапазоны α, β1 и β2.
Корректировка допустимых диапазонов α, β1 и β2 в соответствии с величиной перемещения (радиусом R поворота и расстоянием dm перемещения) транспортного средства, как описано выше, позволяет устанавливать надлежащие допустимые диапазоны и выполнять эффективную корректировку положения и корректировку угла.
[0052] (4) Устройство оценки положения транспортного средства в соответствии с первым вариантом осуществления определяет точку Pt поворота транспортного средства из траектории движения на основе величин перемещений транспортного средства и на основе точки Pt поворота группирует данные о положении ориентира.
Определение точки Pt поворота и группирование данных о положении ориентира на основе точки Pt поворота, как описано выше, позволяет эффективно исключать ошибку в информации одометрии с точкой Pt поворота в качестве опорной точки.
[0053] (5) Устройство оценки положения транспортного средства в соответствии с первым вариантом осуществления при сопоставлении данных о положении ориентира с положениями ориентира в картографической информации корректирует (обновляет) данные о положении ориентира на основе результата сопоставления.
Поскольку, как описано выше, необходимость корректировки данных о положении ориентира определяется на основе результата сопоставления, могут быть сохранены данные о положении ориентира с высокой точностью.
[0054] (6) Устройство оценки положения транспортного средства в соответствии с первым вариантом осуществления получает прямые линии на основе данных о положении ориентира и сопоставляет полученные прямые линии с положениями ориентира в картографической информации.
Обнаружение прямых линий и сопоставление полученных прямых линий с картографической информацией, как описано выше, позволяют повышать точность сопоставления.
[0055] (7) Способ оценки положения транспортного средства в соответствии с первым вариантом осуществления содержит этапы, на которых определяют положения ориентиров на периферии транспортного средства и наряду с этим определяют величины перемещений транспортного средства и сохраняют положения ориентиров в качестве данных о положении ориентира на основе величин перемещений. В дополнение, способ оценки положения транспортного средства содержит этапы, на которых группируют часть данных о положении ориентира в группу в соответствии с состояниями поворота транспортного средства и на основе величин перемещений транспортного средства при определении данных о положении ориентира устанавливают диапазон корректировки для группы. Кроме того, устройство оценки положения транспортного средства получает картографическую информацию, включающую в себя положения ориентира, и путем сопоставления данных о положении ориентира с положениями ориентира в картографической информации на основе установленного диапазона корректировки оценивает положение транспортного средства.
Поскольку, как описано выше, положение транспортного средства оценивается путем сопоставления данных о положении ориентира с картографической информацией при корректировке данных о положении ориентира в пределах диапазона корректировки, точность оценки положения транспортного средства может быть улучшена.
[0056] Хотя настоящее изобретение описано со ссылкой на ограниченное количество вариантов осуществления, объем охраны настоящего изобретения не ограничивается этим, и модификации соответствующих вариантов осуществления на основе вышеприведенного описания очевидны специалисту в области техники.
Список ссылочных позиций
[0057]
11 Устройство оценки положения транспортного средства
12 Радиолокационное устройство
13 Камера
14 Картографическая база данных
15 Группа датчиков
16 Контроллер
21 Транспортное средство
22 Дорожная поверхность
23 Бордюр
24 Линия дорожной разметки
31 Блок определения положения ориентира
32 Блок определения величины перемещения
33 Блок хранения положения ориентира
34 Блок установки диапазона корректировки
35 Блок оценки положения транспортного средства.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

