Результат интеллектуальной деятельности: Устройство обнаружения источников ложных навигационных сигналов НАП ГНСС
Вид РИД
Изобретение
Изобретение относится к области выявления источников ложных навигационных сигналов навигационной аппаратуре потребителей (НАП) глобальной навигационной системы связи (ГНСС).
В особых ситуациях НАП ГНСС приходится функционировать в условиях воздействия помех, представляющий собой ложные навигационные сигналы, имитирующие сигналы ГНСС, которые при решении задачи определения местоположения в штатном режиме способны внести существенные ошибки в определение истинного местоположения НАП ГНСС. Источниками таких помех могут быть генераторы навигационных сигналов, расположенные на космических аппаратах или на Земле. Такие помехи полностью копируют формат полезных спутниковых навигационных сигналов. При этом при формировании помех используется системная шкала времени ГНСС и изменяются задержки кодовой (дальномерной) псевдослучайной последовательности и доплеровский сдвиг частоты навигационных сигналов от нескольких виртуальных навигационных космических аппаратов (НКА). Результатом воздействия таких помех является не соответствующей истинной оценки местоположения НКА, что отрицательно сказывается на оценке координат НАП. Поэтому необходимо обеспечивать обнаружение источников излучения помех и их компенсацию.
Известен обнаружитель с компенсатором помех [1], содержащий N каналов формирования копий помехи. Недостаток данного устройства состоит в том, что данный обнаружитель рассчитан на подключение только одной антенны. Это не позволяет оценивать направления прихода помех, и тем самым ухудшает помехозащищенность систем спутниковой радионавигации на подвижных объектах. Повысить эффективность систем спутниковой радионавигации можно применением многоантенных систем [2].
Распространенным вариантом многоантенной системы является адаптивная антенная решетка [3, с. 13], содержащая N антенных элементов, диаграммообразующую схему из N блоков комплексного взвешивания сигналов, сумматор, сигнальный процессор и устройство реализации алгоритма управления. Эта адаптивная антенная решетка позволяет компенсировать помехи, отличающиеся от полезного сигнала, но не имеет возможности обнаруживать ложные навигационные сигналы.
Целью предлагаемого изобретения является создание устройства обнаружения источников ложных навигационных сигналов НАП ГНСС, в потоке принимаемых радиосигналов адаптивной антенной решеткой.
Поставленная цель достигается тем, что в устройство, состоящее из антенной решетки, содержащей антенные элементы, блоки весовых коэффициентов диаграммообразующей схемы, сумматор, устройство реализации алгоритма управления, дополнительно введены пеленгатор, приемник навигационных сигналов, анализатор информационных сообщений, имеющие связи между собой, выходы антенных элементов антенной решетки соединены с соответствующими входами пеленгатора и входами блоков весовых коэффициентов диаграммообразующей схемы, выход пеленгатора соединен с входом анализатора навигационных сообщений, имеющего выход, соединенный с входом устройства реализации алгоритма управления, выходы блоков весовых коэффициентов диаграммообразующей схемы соединены с соответствующими входами сумматора, выход которого соединен с входом приемника навигационных сигналов, выходы приемника соединены с соответствующими входами анализатора информационных сообщений, при этом элементы антенной решетки принимают навигационные сигналы и помехи и передают их в блоки весовых коэффициентов диаграммообразующей схемы и в пеленгатор, определяющий направления прихода навигационных сигналов и помех и передающий их в анализатор навигационных сообщений, выбирающий последовательно во времени одно из направлений, в котором будет сформирован главный лепесток в диаграмме направленности (ДН), а в оставшихся направлениях - нули ДН, передает эту информацию в устройство реализации алгоритма управления, которое рассчитывает весовые коэффициенты w1, w2 …, wK, обеспечивающие формирование главного лепестка ДН в выбранном направлении, а в оставшихся направлениях - нулей ДН, и передает значения вектора в соответствующие блоки весовых коэффициентов диаграммообразующей схемы, которые формируют взвешенные сигналы и передают их в сумматор, где происходит их сложение и передача результирующего сигнала в приемник навигационных сигналов, обрабатывающий поступившие сигналы и выделяющий из них навигационные сообщения, которые содержат оперативную и не оперативную информацию о траекториях движения группировки НКА с последующей передачей этой информации в анализатор информационных сообщений, который осуществляет анализ принятой информации на принадлежность ее к группировке НКА на основе имеющихся априорных данных, при нарушении в структуре и содержании информации анализатор навигационных сообщений относит их к источникам ложных навигационных сигналов.
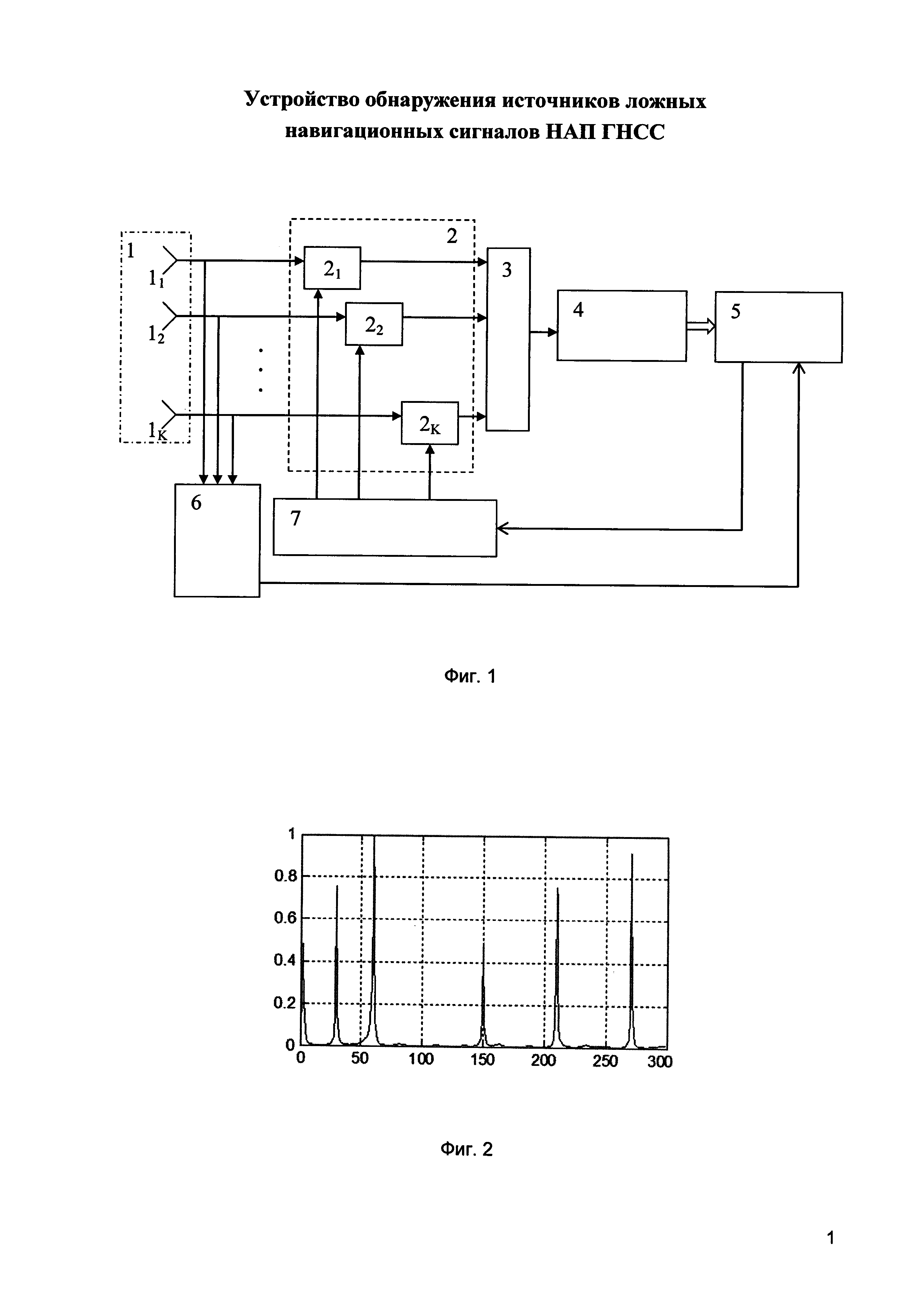
Сущность устройства обнаружения источников ложных навигационных сигналов НАП ГНСС поясняется следующими рисунками. На фиг. 1 показана функциональная схема устройства обнаружения источников ложных навигационных сигналов, на фиг. 2 показан пространственный спектр сигналов, поступающих на вход пеленгатора, на фиг. 3 показан пример диаграммы направленности антенной решетки, на фиг. 4 приведена таблица направлений на источники излучения и значения диаграммы направленности (ДН) в этих направлениях.
Устройство обнаружения источников ложных навигационных сигналов НАП ГНСС состоит из антенной решетки 1, имеющей К пространственно разнесенных антенных элементов 11, 12, … 1К, диаграммообразующей схемы (ДОС) 2, состоящей из блоков весовых коэффициентов 21, 22, … 2К, сумматора 3, приемника навигационных сигналов 4, анализатора навигационных сообщений 5, пеленгатора 6, устройства реализации алгоритма управления 7, которые имеют между собой следующие связи. Выходы антенных элементов 11, 12, … 1К антенной решетки 1 соединены с соответствующими входами пеленгатора бис соответствующими входами блоков весовых коэффициентов 21, 22, … 2К ДОС 2. Выход пеленгатора 6 соединен с одним из входов анализатора навигационных сообщений 5. Выходы блоков весовых коэффициентов 21, 22, … 2К ДОС 2 соединены с соответствующими входами сумматора 3. Выход сумматора 3 соединен с приемником навигационных сигналов 4, выходы которого соединены с соответствующими входами анализатора навигационных сообщений 5. Один из выходов анализатора навигационных сообщений 5 соединен с входом устройства реализации алгоритма управления 7, выходы которого соединены с соответствующими входами блоков весовых коэффициентов 21, 22, … 2К ДОС 2. Другой выход анализатора навигационных сообщений 5 соединен НАП ГНСС (на фиг. не показан).
Работа устройства обнаружения источников ложных навигационных сигналов осуществляется следующим образом.
Антенные элементы 11, 12, … 1К антенной решетки 1 принимают навигационные сигналы и помехи и передают их в пеленгатор 6, для оценки направлений прихода. В пеленгаторе 6 оценивается ковариационная матрица сигналов
R=E[X(t)X(t)H]/Т,
где Е[⋅] - оператор математического ожидания, Т - время усреднения, X(t)=[x1(t), x2(t), …, xK(t)]Т - вектор сигналов в каналах антенной решетки, верхний индекс «Н» означает комплексное сопряжение и транспонирование, «Т» - транспонирование.
С использованием ковариационной матрицы с помощью одного из распространенных ковариационных алгоритмов [4] рассчитывается пространственный спектр. На фиг. 2 показан пример пространственного спектра сигналов, поступающих на вход пеленгатора от 6 источников, по максимумам пространственного спектра в пеленгаторе 6 определяются направления прихода сигналов, которые расположены в направлениях 0, 30, 60, 150, 210, 270 градусов. Определив направления на источники излучения, пеленгатор 6 передает их в анализатор информационных сообщений 5.
Анализатор информационных сообщений 5 последовательно во времени выбирает одно из направлений, в котором будет сформирован главный лепесток ДН, а в оставшихся направлениях - нули ДН, передает эту информацию в устройство реализации алгоритма управления 7, которое рассчитывает весовые коэффициенты w1, w2 …, wK, обеспечивающие формирование главного лепестка ДН в выбранном направлении, а в оставшихся направлениях - нулей ДН.
Диаграмма направленности антенной решетки в комплексной форме определяется выражением

где ρk и ϕk - полярные координаты k-го элемента решетки, qk(θ) -коэффициент усиления k-го антенного элемента в направлении θ, λ - длина волны излучения источника сигнала. Показатель степени при экспоненте представляет собой набег фазы, обусловленный разностью хода сигнала между фазовым центром антенной решетки и k-м элементом.
Из выражения (1) видно, что диаграмма направленности непосредственно зависит от весовых коэффициентов wk (k=1, 2, …, K) и от координат ρk и ϕk антенных элементов. При постоянных координатах антенных элементов за счет выбора значений коэффициентов wk в соответствии с требуемым критерием можно управлять формой диаграммы направленности.
В самом общем случае антенная решетка 1 может состоять из антенных элементов 11, 12, … 1К различных типов, произвольно расположенных в пространстве.
Наибольшее распространение получили электрические 11, 12, … 1К с вертикальной поляризацией и круговой, равномерной диаграммой направленности в горизонтальной плоскости
q(θ)=const (0≤0≤360°);
Для формирования ДН антенной решетки 1 задаются единичные значения диаграммы направленности в предполагаемых направлениях на источники сигналов и нулевые значения в направлениях на источники помех, а затем из системы уравнений

рассчитывается вектор весовых коэффициентов W=[w1, w2, …, wK]T, удовлетворяющий этим ограничениям. Здесь N - общее число источников сигнала и помех.
Перепишем систему (2) в матричном виде

где 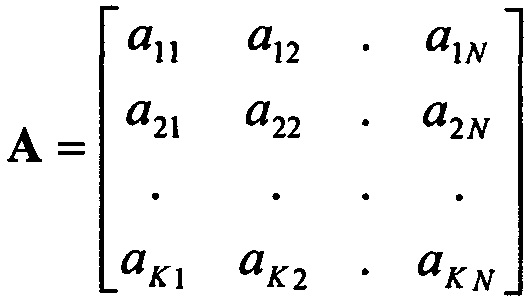 ,
, 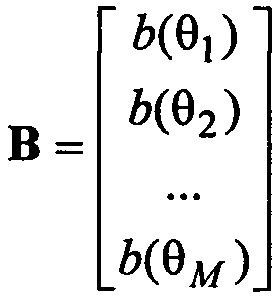 ,
,
А - матрица размерностью K×N, В - вектор столбец размерностью N×1.
Здесь 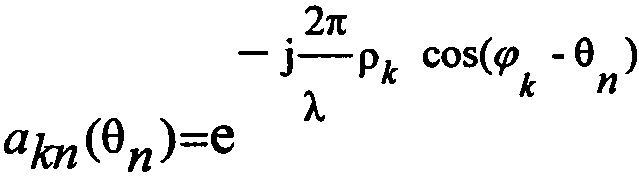 , k=l, 2, …, K, n=l, 2, …, N.
, k=l, 2, …, K, n=l, 2, …, N.
Система (3) содержит N уравнений с K неизвестными. Как правило, N≥K. При N>K система относится к классу переопределенных и не может быть решена с применением обратной матрицы, поскольку обратная матрица существует только лишь для квадратных матриц. Решение такой задачи может быть найдено с помощью метода наименьших квадратов [5]. В этом методе решение отыскивается с применением аппарата псевдообратных матриц имеющих вид

Если матрица А не вырождена, т.е. имеет полный ранг (в данном случае ранг, равный K), то псевдообратная матрица определяется по формуле

и система (3) имеет единственное решение, определяемое с помощью (4).
При N≤K вектор (4) является точным решением системы (3).
Изложенный метод вычисления весовых коэффициентов адаптивной антенной решетки по заданным направлениям позволяет обеспечить пространственную селекцию источников излучения.
Рассмотрим пример, демонстрирующий возможности данного метода. В качестве примера возьмем кольцевую антенную решетку с 9-ю антенными элементами и радиусом 0,7 м. Предположим, что на эту решетку поступают сигналы от 6-ти источников с частотами 300 мГц. На фиг. 4 (в таблице) приведены направления на источники излучения и вариант значений диаграммы направленности в этих направлениях. В этом варианте значение ДН в направлении 30° равно 1, а в остальных направлениях - равны нулю.
Диаграмма направленности антенной решетки, соответствующая этому варианту, приведена на фиг. 3. Из нее видно, что на источник с направлением 30° значение ДН равно 1, а в направлениях на остальные источники сформированы глубокие нули.
Рассчитанные значения вектора весовых коэффициентов W=[w1, w2, …, wK]T поступают в блоки весовых коэффициентов 21, 22,… 2К ДОС 2, благодаря этому на выходе сумматора 3 выделяются сигналы, пришедшие с заданного направления. Эти сигналы поступают в приемник навигационных сигналов 4.
С выходов приемника 4 сообщения, содержащие оперативную и не оперативную информацию [6] о траекториях, координатах, скоростях движения НКА, поступают в анализатор информационных сообщений 5.
Анализатор информационных сообщений 5 осуществляет анализ принятой информации на принадлежность ее к группировке НКА на основе имеющихся априорных данных. При этом проводится анализ структуры и содержания навигационных сообщений, которые содержат оперативную и не оперативную информацию. Если принятые сообщения имеют нарушения в структуре и содержании навигационного сигнала, то соответствующие им источники является источниками ложных навигационных сигналов.
Если с одного направления приходят несколько сигналов, имеющих разные навигационные координаты, то эти сигналы излучаются источником ложных навигационных сигналов.
Проведя анализ принятых сигналов и помех с выбранного направления анализатор информационных сообщений, выбирает следующее направление, в котором будет сформирован главный лепесток ДН, а в оставшихся направлениях - нули ДН, передает эту информацию в устройство реализации алгоритма управления 7, которое рассчитывает весовые коэффициенты w1, w2, …, wK, обеспечивающие формирование главного лепестка ДН в выбранном новом направлении, а в оставшихся направлениях - нулей ДН.
Таким образом последовательно во времени обеспечивается поиск источников ложных навигационных сигналов, приходящих с разных направлений. В результате анализа принятой информации анализатор сигналов НКА и помех формирует перечень направлений прихода полезных сигналов и помех, который передает в НАП ГНСС.
Литература
1. Патент RU 2574860 РФ, МПК Н04В 1/10. Обнаружитель с компенсатором помех / А.В. Журавлев и др. (РФ); Открытое акционерное общество научно-внедренческое предприятие «ПРОТЕК» (РФ). - №2014152662; Заявлено 24.12.2014; Опубл. 10.02.2016, Бюл. 4. - 6 с.: 1 ил.
2. Зимин А.С., Криницкий Г.В. Применение многоантенных систем для повышения помехозащищенности систем спутниковой радионавигации на подвижных объектах. Электронный журнал «Труды МАИ». Выпуск №51.
3. Монзинго Р.А., Миллер Т.У. Адаптивные антенные системы. Введение в теорию: Пер. с англ. М.: Радио и связь, 1986. 448 с.
4. Журавлев А.В., Безмага В.М., Маркин В.Г. Ковариационные методы определения направлений прихода сигналов. Научно-технический журнал «Теория и техника радиосвязи», Выпуск 4, 2016 г., с. 33-39.
5. Беклемишев Д.В. Дополнительные главы линейной алгебры. М.: Наука. Главная редакция физико-математической литературы. 1983. 336 с.
6. Интерфейсный контрольный документ. Навигационный радиосигнал диапазонах L1, L2. (редакция 5.1). Москва, 2008 г. 74 с.
Устройство обнаружения источников ложных навигационных сигналов навигационной аппаратуры потребителей (НАП) глобальной навигационной системы связи (ГНСС), состоящее из антенной решетки, содержащей антенные элементы, блоки весовых коэффициентов диаграммообразующей схемы, сумматора, устройства реализации алгоритма управления, дополнительно введены пеленгатор, приемник навигационных сигналов, анализатор информационных сообщений, имеющие связи между собой, выходы антенных элементов антенной решетки соединены с соответствующими входами пеленгатора и входами блоков весовых коэффициентов диаграммообразующей схемы, выход пеленгатора соединен с входом анализатора навигационных сообщений, имеющего выход, соединенный с входом устройства реализации алгоритма управления, выходы блоков весовых коэффициентов диаграммообразующей схемы соединены с соответствующими входами сумматора, выход которого соединен с входом приемника навигационных сигналов, выходы приемника соединены с соответствующими входами анализатора информационных сообщений, при этом элементы антенной решетки принимают навигационные сигналы и помехи и передают их в блоки весовых коэффициентов диаграммообразующей схемы и в пеленгатор, определяющий направления прихода навигационных сигналов и помех и передающий их в анализатор навигационных сообщений, выбирающий последовательно во времени одно из направлений, в котором будет сформирован главный лепесток диаграммы направленности (ДН), а в оставшихся направлениях - нули ДН, передает эту информацию в устройство реализации алгоритма управления, которое рассчитывает весовые коэффициенты w, w, …, w, обеспечивающие формирование главного лепестка ДН в выбранном направлении, а в оставшихся направлениях - нулей ДН, передает эти значения в блок расчета весовых коэффициентов, который рассчитывает вектор весовых коэффициентов и передает значения вектора в соответствующие блоки весовых коэффициентов диаграммообразующей схемы, которые формируют взвешенные сигналы и передают их в сумматор, где происходит их сложение и передача результирующего сигнала в приемник навигационных сигналов, обрабатывающий поступившие сигналы и выделяющий из них навигационные сообщения, которые содержат оперативную и не оперативную информацию о группировке навигационных космических аппаратов (НКА) с последующей передачей этой информации в анализатор информационных сообщений, который осуществляет анализ принятой информации на принадлежность ее к группировке НКА на основе имеющихся априорных данных, при нарушении в структуре и содержании анализатор навигационных сообщений относит их к источникам ложных навигационных сигналов.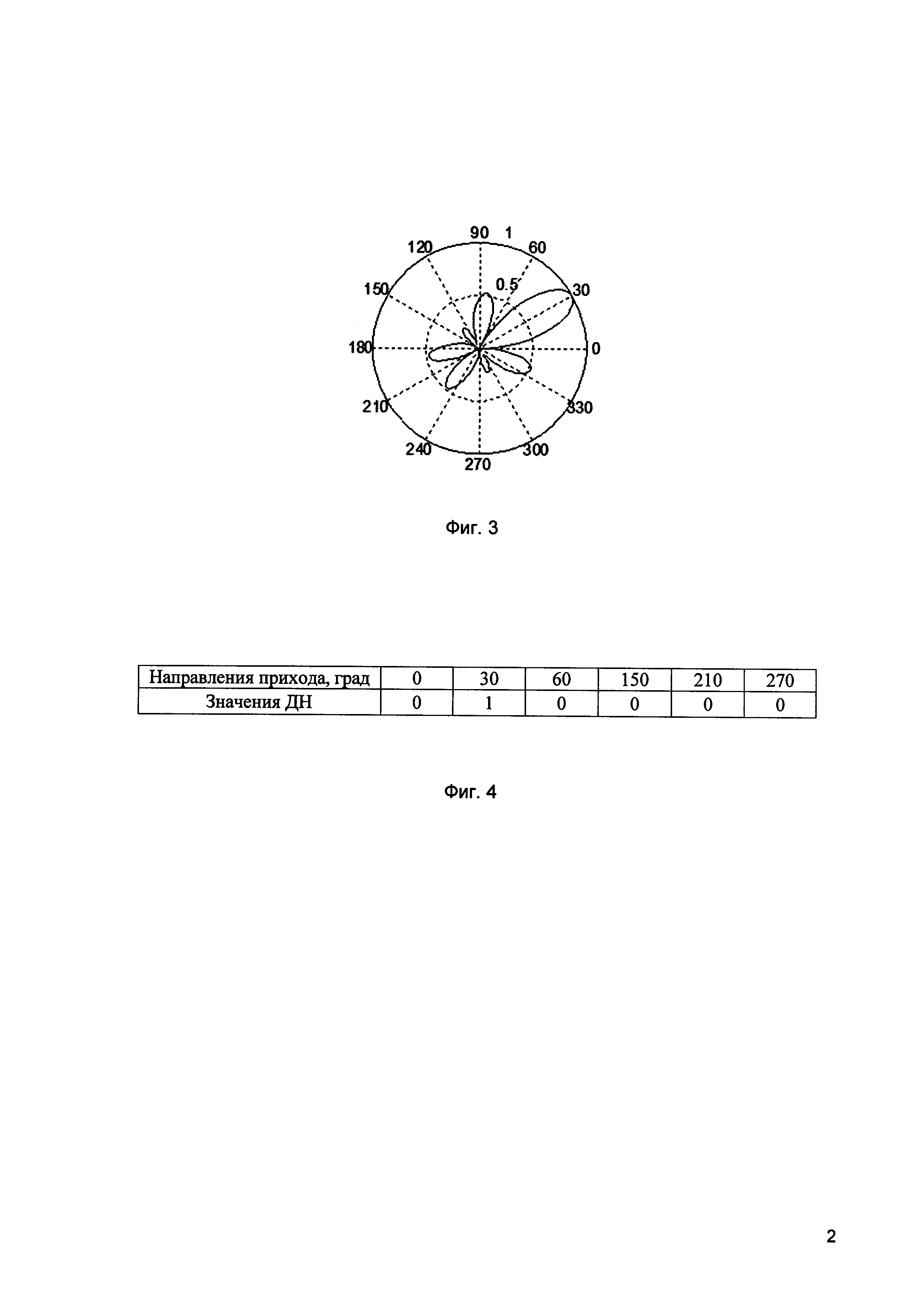

Симметричная вибраторная антенна с симметрирующим устройством
Радиопередающее устройство с автоматической регулировкой параметров спектра радиосигнала
Способ формирования диаграммы направленности активной фазированной антенной решетки
Медианный фильтр с компенсацией задержки выходного сигнала
Антенная система с круговой диаграммой направленности для нескольких передатчиков
Способ межпозиционного отождествления результатов измерений и определения координат воздушных целей в многопозиционной радиолокационной системе
Способ строительства дорожной одежды и конструкция дорожной одежды
Корреляционно-фазовый пеленгатор
Способ определения координат воздушного судна в спутниковой-псевдоспутниковой многопозиционной системе наблюдения
Устройство компенсации прямого радиолокационного сигнала радиопередатчика в приемнике двухпозиционной радиолокационной системы
Способ определения координат воздушных целей в многопозиционной радиолокационной системе в условиях малого значения отношения сигнал/шум
Способ определения координат наземной цели радиолокационной системой, состоящей из двух многолучевых радиопередатчиков и приемника

