Результат интеллектуальной деятельности: СПОСОБ РЕЗОНАНСНОЙ НАСТРОЙКИ РОТОРНОГО ВИБРАЦИОННОГО ГИРОСКОПА
Вид РИД
Изобретение
1. Область техники, к которой относится изобретение
Изобретение относится к гироскопической технике и может быть использовано для регулирования и испытаний роторных вибрационных гироскопов, применяемых в системах управления подвижными объектами - самолетами, ракетами, морскими судами. Способ включает определение резонансной скорости вращения роторного вибрационного гироскопа (РВГ) путем изменения частоты его вращения по линейному закону и контроля амплитуды отклонения ротора по сигналу датчика угла, что позволяет значительно снизить трудоемкость и автоматизировать операции регулирования РВГ.
2. Уровень техники
Рассмотрим аналоги предлагаемого изобретения.
2.1 Библиографические данные аналогов изобретения:
[1] G01C25. Способ динамической настройки динамически настраиваемого гироскопа. Патент RU 2288450. Авторы Малтинский Моисей Иосифович, Биндер Яков Исаакович, Мумин Олег Леонидович, Сумароков Виктор Владимирович, Алимов Сергей Михайлович.
2.2 Наиболее близким к заявляемому изобретению аналогом (прототипом) является способ [1]. заключающийся в том, что при работе динамически настраиваемого гироскопа (ДНГ) в режиме электрической пружины частоту вращения гироскопа изменяют дискретно методом последовательных приближений до тех пор, пока реакция гироскопа на ступенчатое изменение сигнала датчика угла не станет равной нулю. Данный способ применим и для роторного вибрационного гироскопа типа «виброротор», имеющего упругий подвес круглого симметричного маховика и обеспечивающий ему одну степень свободы относительно вала. Однако при проведении настроечных операций в процессе изготовления РВГ данный способ значительно увеличивает трудозатраты вследствие необходимости многократных замеров резонансной частоты в ходе обработки упругих перемычек подвеса для достижения ее заданного значения. Метод последовательных приближений, используемый в данном способе, удлиняет процесс поиска резонансной частоты, требует участия высококвалифицированного оператора для оценки реакции гироскопа на изменение скорости вращения и не предусматривает возможности автоматизации этого процесса. Кроме того, данный метод не применим при изготовлении РВГ, работающих в режиме непосредственного измерения, без обратной связи типа «электрической пружины».
3. Раскрытие изобретения
3.1 Техническим результатом предлагаемого изобретения является снижение трудоемкости и автоматизация сборочных и регулировочных операций при изготовлении приборов, в частности - при измерении частоты резонансной настройки в ходе обработки перемычек упругого подвеса РВГ для обеспечения заданной по конструкторской документации резонансной скорости вращения гироскопа.
Технический результат достигается наличием существенного признака - измерением угла отклонения ротора гироскопа датчиками угла при непрерывном изменении скорости его вращения по линейному закону.
Сущность изобретения заключается в том, что по реакции роторного вибрационного гироскопа на меняющуюся по линейному закону частоту вращения можно с достаточной точностью определить частоту его резонансной настройки.
3.2 Заявляемое изобретение направлено на решение задачи определения частоты резонансной настройки роторного вибрационного гироскопа по амплитуде колебаний ротора, измеренной датчиками угла в режиме работы без обратной связи при изменении частоты вращения вала по линейному закону от минимальной до максимальной.
Для решения этой задачи производят непрерывное измерение амплитуды колебаний ротора по сигналу датчика угла при непрерывном изменении частоты вращения вала гироскопа от минимальной до максимальной и обратно по линейному закону, находят точку пересечения графиков зависимости амплитуды колебаний ротора от частоты вращения при увеличении частоты вращения и уменьшении частоты вращения. Частота вращения, соответствующая этой точке пересечения, является частотой резонансной настройки РВГ.
Существенные признаки, характеризующие предлагаемое изобретение и общие с прототипом [1]: измерение выходного сигнала прибора при изменении частоты его вращения. Существенные признаки, характеризующие предлагаемое изобретение и отличающиеся от прототипа: измерение амплитуды колебаний ротора по сигналам с датчика угла, непрерывное изменение частоты вращения вала гироскопа от минимальной до максимальной и обратно по линейному закону.
4. Краткое описание чертежей
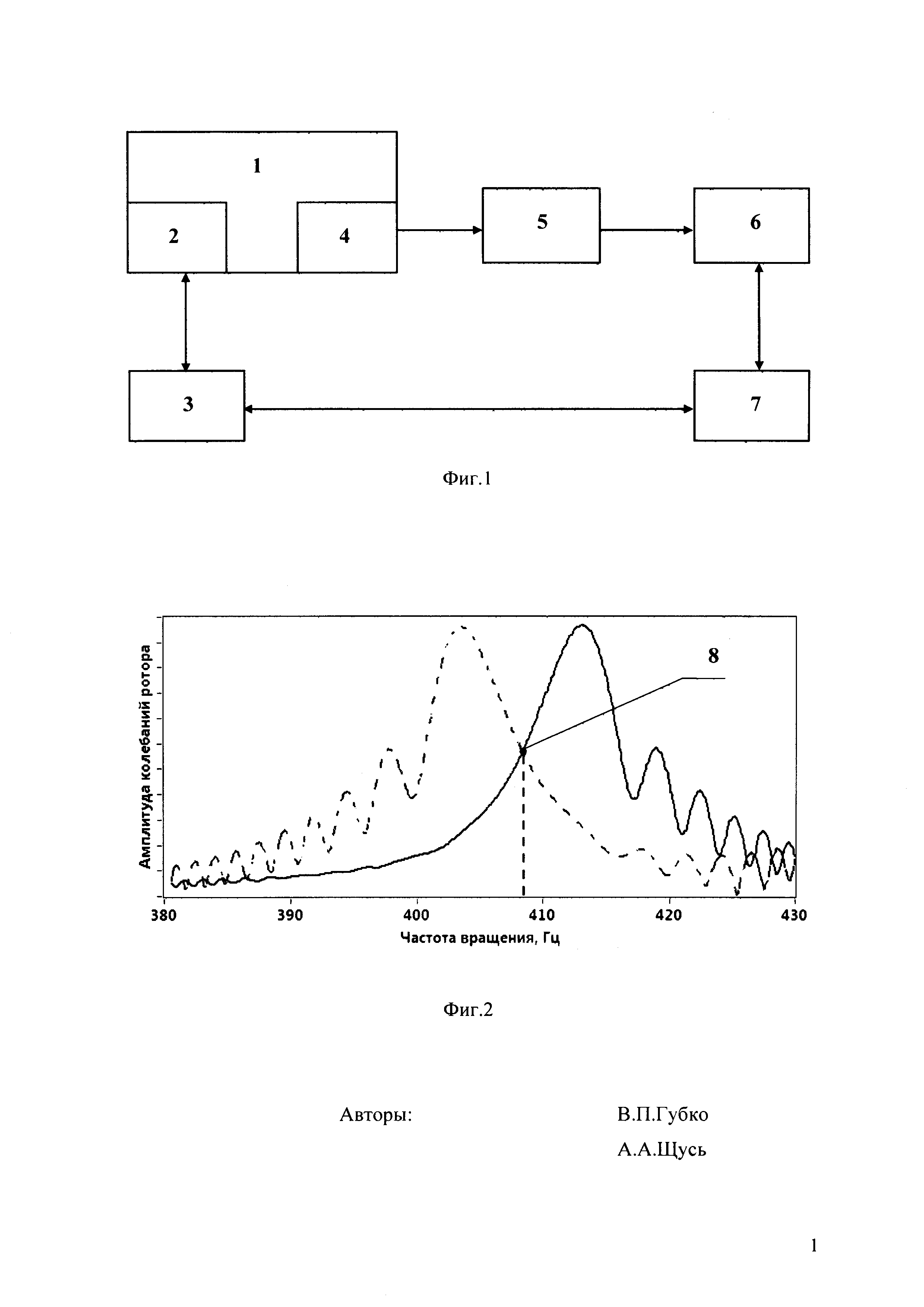
На фиг. 1 представлена блок-схема, поясняющая способ определения резонансной частоты вращения роторного вибрационного гироскопа.
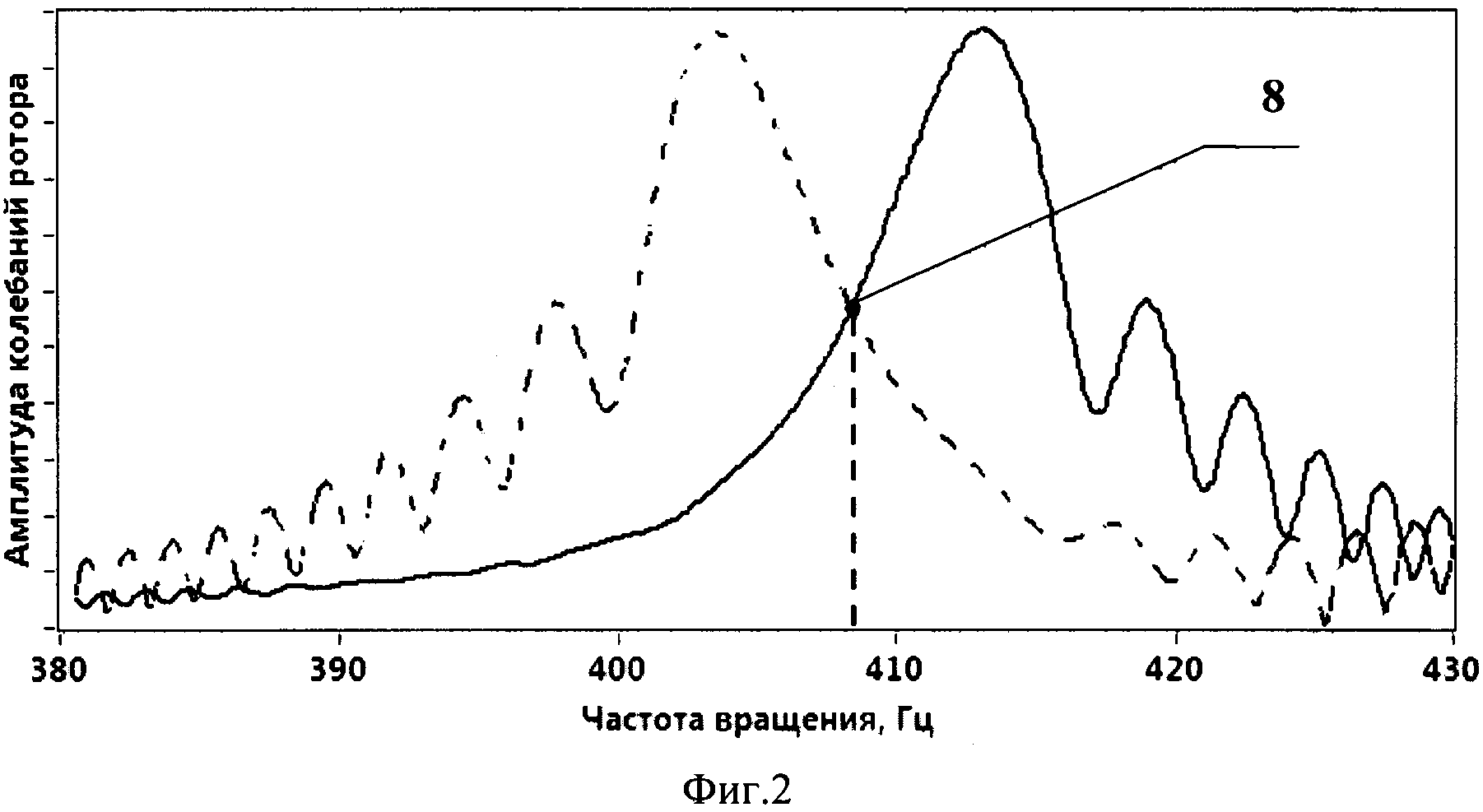
На фиг. 2 показан экспериментальный график зависимости амплитуды отклонения ротора от частоты вращения при увеличении и уменьшении частоты вращения, показана точка пересечения графиков, соответствующая резонансной частоте вращения роторного вибрационного гироскопа.
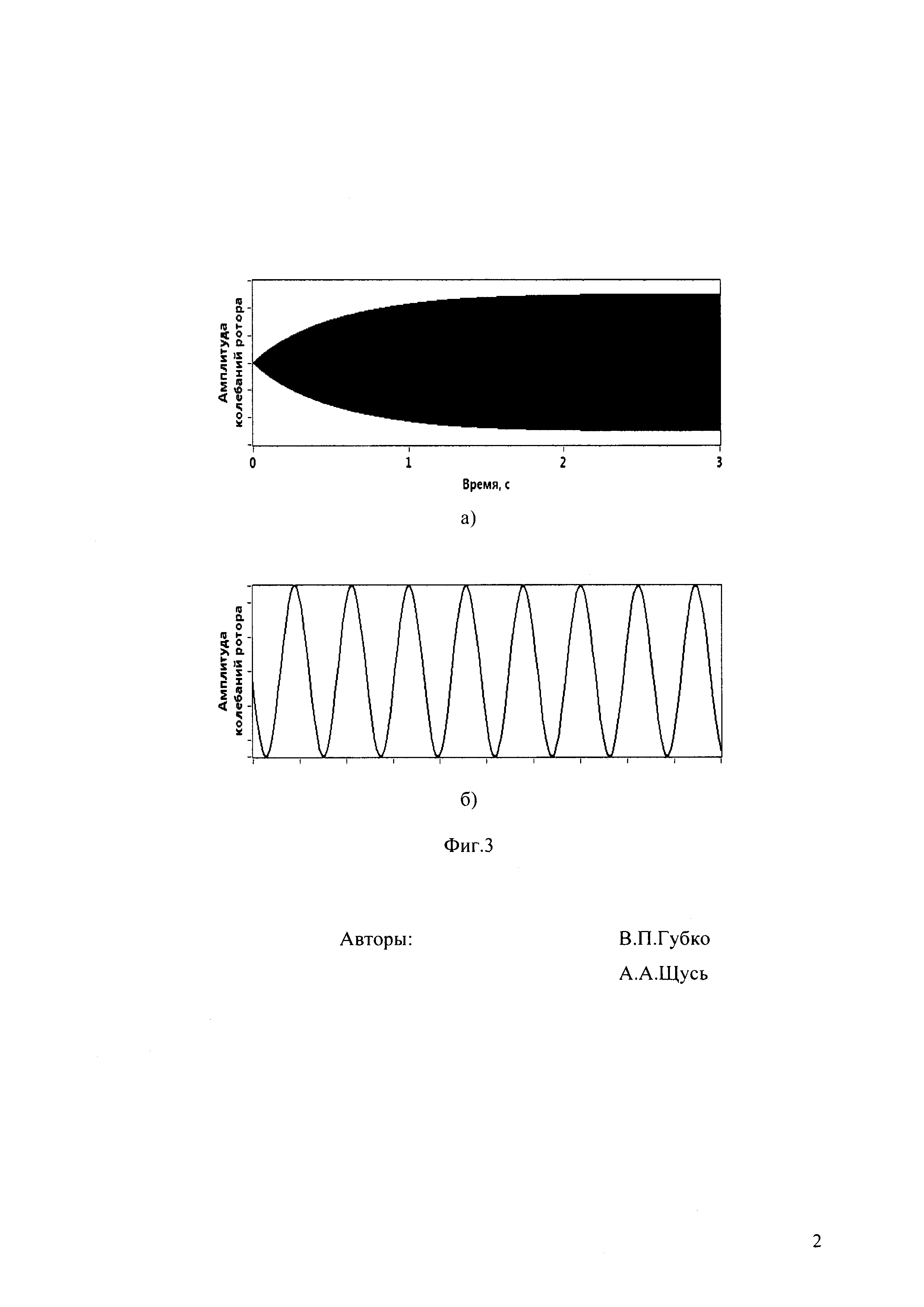
На фиг. 3а показана осциллограмма колебаний ротора, полученная по результатам численного интегрирования уравнения движения ротора РВГ в системе координат, связанной с валом, при вращении вала РВГ с постоянной угловой скоростью Ωрез. График показывает реакцию гироскопа на ступенчатое воздействие возмущающих моментов, действующих на ротор гироскопа.
На фиг. 3б показан участок осциллограммы фиг. 3а в увеличенном масштабе по времени, соответствующий установившимся колебаниям ротора с частотой 2πΩрез после окончания переходного процесса от ступенчатого воздействия возмущающих моментов.
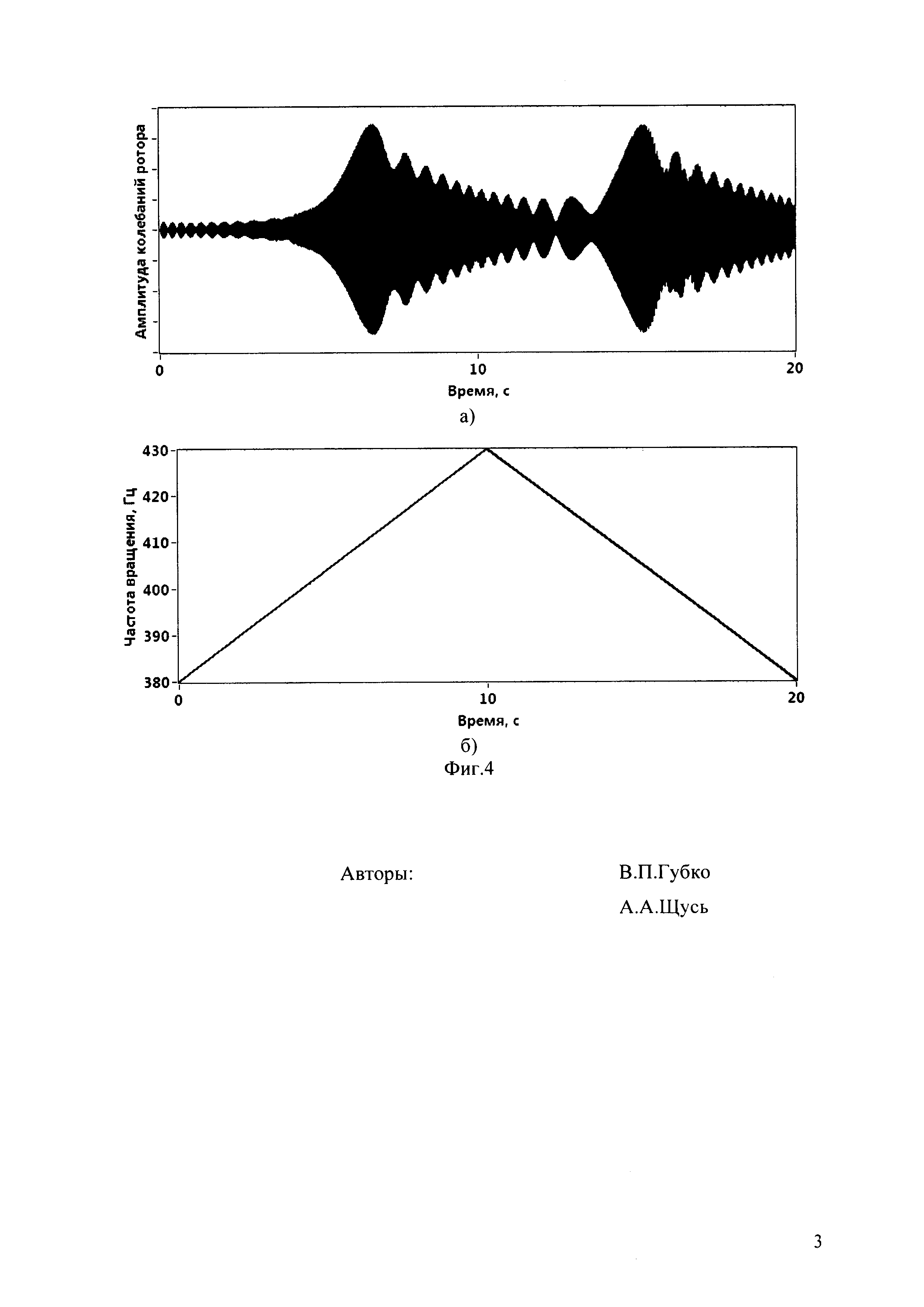
На фиг. 4а показана осциллограмма колебаний ротора, полученная по результатам численного интегрирования уравнения движения ротора РВГ в системе координат, связанной с валом, при увеличении и уменьшении частоты вращения.
На фиг. 4б показан график изменения частоты вращения, соответствующий осциллограмме колебаний ротора на фиг. 4а.
На фиг. 5 показан графики зависимости амплитуды колебаний ротора от частоты вращения при увеличении и уменьшении частоты вращения, полученные по результатам графиков фиг. 4а и 4б, показана точка пересечения графиков, соответствующая резонансной частоте вращения РВГ.
5. Осуществление изобретения
5.1 Предложенный способ резонансной настройки роторного вибрационного гироскопа реализуют следующим образом.
Гироскоп 1 (фиг. 1) устанавливается на неподвижное основание так, чтобы ось вращения вала двигателя 2 была вертикальна. Вал гироскопа при помощи двигателя, управляемого блоком привода 3, приводят во вращение с частотой Fmin, заведомо ниже предполагаемой резонансной частоты регулируемого прибора. Сигнал с датчика угла 4 одного из измерительных каналов прибора подают в измерительный тракт, состоящий из предварительного усилителя 5, аналого-цифрового преобразователя 6 и счетно-решающего устройства 7. Блок привода гироскопа начинает увеличивать частоту вращения гироскопа со скоростью 3…10 Гц/с по линейному закону. Сигнал датчика угла, усиленный предварительным усилителем, непрерывно оцифровывается при помощи аналого-цифрового преобразователя с частотой опроса, достаточной для измерения амплитуды отклонения ротора. Счетно-решающее устройство вычисляет амплитуду отклонения ротора в привязке к частоте вращения вала в данный момент времени и создает массив данных, в котором частоте вращения вала в данный момент времени соответствует определенная амплитуда отклонения ротора. После достижения частоты вращения Fmax, заведомо выше предполагаемой резонансной частоты, изменяют направление развертки частоты вращения на противоположную, с той же скоростью. По достижении и частоты вращения Fmin развертку останавливают, прибор выключают. Счетно-решающее устройство, по специальному алгоритму, определяет частоту вращения, соответствующую точке 8 пересечения графиков фиг. 2 зависимости амплитуды отклонения ротора от частоты вращения при увеличении частоты вращения (сплошная линия) и уменьшении частоты вращения (пунктирная линия). Данная частота и является резонансной частотой вращения роторного вибрационного гироскопа Fpeз. Длительность всего описанного процесса определения резонансной частоты роторного вибрационного гироскопа составляет 20 секунд, он проходит в автоматическом режиме, без участия оператора.
5.2 Резонансная настройка роторных вибрационных гироскопов применяется для повышения их чувствительности и точности. Условие резонансной настройки имеет вид:

где Ωpeз=2πFpeз - резонансная угловая скорость вращения вала РВГ, cу - угловая жесткость упругого подвеса ротора, А, В, С - осевой и экваториальные главные моменты инерции ротора. При выполнении условия (1) колебания ротора РВГ вокруг оси его подвеса имеют резонансный характер, амплитуда которых ограничена вязким трением. Уравнение движения ротора вокруг оси упругого подвеса во вращающейся вместе с валом системе координат имеет вид:

где ϕ - угол отклонения ротора вокруг оси подвеса, kу - коэффициент вязкого трения, ωх, ωу - проекции горизонтальной составляющей скорости вращения Земли на оси чувствительности РВГ. Под действием моментов правой части уравнения ротор колеблется с частотой 2πΩ относительно вращающегося вала, и при Ω удовлетворяющей условию (1), амплитуда этих колебаний в установившемся режиме достигает максимума. Переходный процесс колебаний ротора под действием моментов ΔΩωx и ΔΩωу показан на фиг. 3а. Вследствие высокой частоты колебаний по сравнению с масштабом графика по оси абсцисс, осциллограмма представляет собой заштрихованную область, ограниченную амплитудой колебаний ротора. В увеличенном масштабе колебания ротора показаны на фиг. 3б. Графики получены путем численного интегрирования уравнения (2) при следующих исходных данных: А=0,0008628 Гсм⋅с2, В=0,0004619 Гсм⋅с2, С=0,0004619 Гсм⋅с2, су=402,056 Гсм, kу=0,0002 Гсм⋅с, Ω=2π⋅408,6 1/с (что соответствует рассчитанной по формуле (1) резонансной угловой скорости вращения вала РВГ). Как видно из фиг. 3а, реакция ротора гироскопа на ступенчатое воздействие моментов правой части уравнения (2) происходит не мгновенно, а с запаздыванием по экспоненциальному закону с некоторой постоянной времени τ. Данное свойство использовано для определения резонансной частоты вращения РВГ заявляемым способом.
На фиг. 4а показана осциллограмма колебаний ротора РВГ, полученная численным интегрированием уравнения (2) при подстановке Ω=Ωmin+kΩ⋅t (увеличение частоты вращения ротора по линейному закону до 10-й секунды процесса) и Ω=Qmax-kΩ⋅t (уменьшение частоты вращения ротора по линейному закону с 10-й по 20-ю секунды процесса). Здесь Ωmin=2πFmin, Ωmax=2πFmax, kΩ - коэффициент линейного изменения скорости вращения вала, t - время. График на фиг. 4б показывает линейное изменение частоты вращения вала РВГ от Fmin=380 Гц до Fmax=430 Гц (до 10-й секунды процесса) и обратно (с 10-й до 20-й секунды процесса). Из графика фиг. 4а видно, что как на участке увеличения частоты вращения, так и на участке ее уменьшения, амплитуда колебаний ротора достигает максимума, что связано с прохождением через резонансную частоту вращения. Но, вследствие описанного выше запаздывания реакции ротора на внешнее воздействие, максимумы амплитуды колебаний сдвинуты по времени относительно момента прохождения через резонансную частоту. Т.к. увеличение и уменьшение частоты вращения происходит с одинаковой скоростью kΩ, резонансная частота вращения находится между максимумами амплитуды колебаний ротора, т.е. в точке пересечения графиков зависимости амплитуды колебаний от частоты вращения при возрастании и убывании этой частоты. Эти графики, полученные по результатам моделирования фиг. 4а, показаны на фиг. 5. График при увеличении частоты вращения показан сплошной линией, а при уменьшении - пунктирной. Сравнение полученного теоретического графика с экспериментальным графиком фиг. 2 позволяет заключить следующее:
а) процессы, происходящие при прохождении резонансной частоты вращения РВГ с ее линейным возрастанием и убыванием, достаточно точно описываются представленной математической моделью;
б) точка пересечения 8 на экспериментальном графике фиг. 2 по частоте совпадает с точкой 8' на теоретическом графике фиг. 5 и резонансной частотой вращения, рассчитанной по формуле (1), что подтверждает возможность определения резонансной частоты вращения РВГ заявляемым способом.
Таким образом, использование представленного способа резонансной настройки РВГ позволяет с достаточной точностью определять резонансную частоту вращения прибора, при этом снижается трудоемкость и повышается степень автоматизации регулировочных операций при изготовлении роторных вибрационных гироскопов.
Способ резонансной настройки роторного вибрационного гироскопа, заключающийся в измерении реакции гироскопа на изменение скорости его вращения, отличающийся тем, что гироскоп устанавливают на неподвижное основание осью вращения вертикально, скорость вращения гироскопа повышают по линейному закону от минимальной, заведомо ниже искомой резонансной скорости вращения, до максимальной, заведомо выше резонансной скорости вращения, затем скорость вращения понижают по линейному закону до исходной (минимальной) скорости, при этом непрерывно измеряют амплитуду колебаний ротора по сигналам с датчика угла, после чего гироскоп приводят во вращение с угловой скоростью, соответствующей точке пересечения зависимостей амплитуды колебаний ротора от скорости вращения при ее повышении и понижении, находящейся между максимумами данных зависимостей и являющейся искомой резонансной скоростью вращения гироскопа.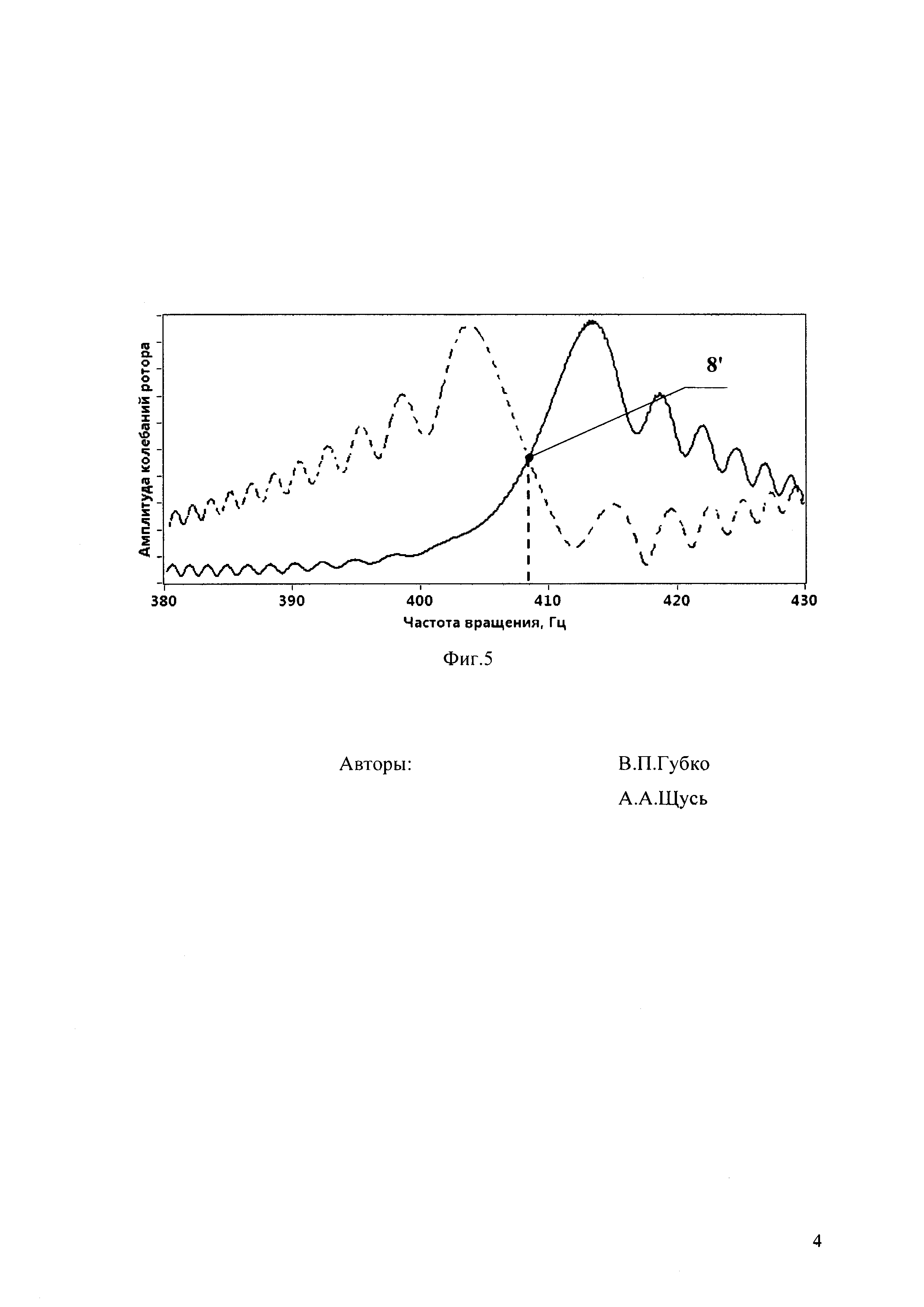
Устройство и способ измерения абсолютной угловой скорости
Динамически настраиваемый гироскоп
Способ определения дисбаланса рам гиростабилизатора
Динамически настраиваемый гироскоп
Способ балансировки динамически настраиваемого гироскопа
Устройство и способ измерения абсолютной угловой скорости
Динамически настраиваемый гироскоп
Способ определения дисбаланса рам гиростабилизатора
Динамически настраиваемый гироскоп

