Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ РИСКА СТОЛКНОВЕНИЯ С ПРЕПЯТСВИЕМ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству интерпретации обстановки, которое определяет степень риска в конкретном месте на дороге, где транспортное средство в ином случае наткнется на другое транспортное средство или пешехода.
Уровень техники
[0002] Было предложено устройство вычисления степени риска для вычисления степени потенциального риска вокруг рассматриваемого транспортного средства (см. патентную литературу 1). Согласно патентной литературе 1, на основе информации от устройства обнаружения препятствия, устройство вычисления степени риска изменяет настройку ячейки для областей с координатной сеткой вокруг рассматриваемого транспортного средства и, таким образом, вычисляет потенциальные риски соответственно для перекрестков, или в областях с координатной сеткой, в ячейке. Соответственно, на основе вычисленных таким образом потенциальных рисков, устройство вычисления степени риска задает целевой маршрут рассматриваемого транспортного средства.
Перечень ссылочных материалов
Патентная литература
[0003] Патентная литература 1: Международная публикация № 2012/032624
Сущность изобретения
[0004] Поскольку рисковые потенциалы вычисляются соответственно для всех областей с координатной сеткой вокруг рассматриваемого транспортного средства, возникает проблема, в которой обнаруживается множество препятствий, арифметическая нагрузка увеличивается, и занимает более длительное время вычисление степени риска.
[0005] Принимая во внимание вышеописанную проблему, было выполнено настоящее изобретение, и его целью является предоставление устройства интерпретации обстановки, которое препятствует чрезмерному увеличению арифметической нагрузки.
[0006] Устройство интерпретации обстановки согласно аспекту настоящего изобретения определяет, существует ли препятствие в рамках обнаружения препятствия, которые задаются заранее для конкретного местоположения, где транспортное средство в ином случае столкнется с другим транспортным средством или пешеходом, и которые имеют форму, соответствующую структуре дороги. Таким образом, на основе результата определения, устройство интерпретации обстановки вычисляет степень риска в конкретном местоположении.
Краткое описание чертежей
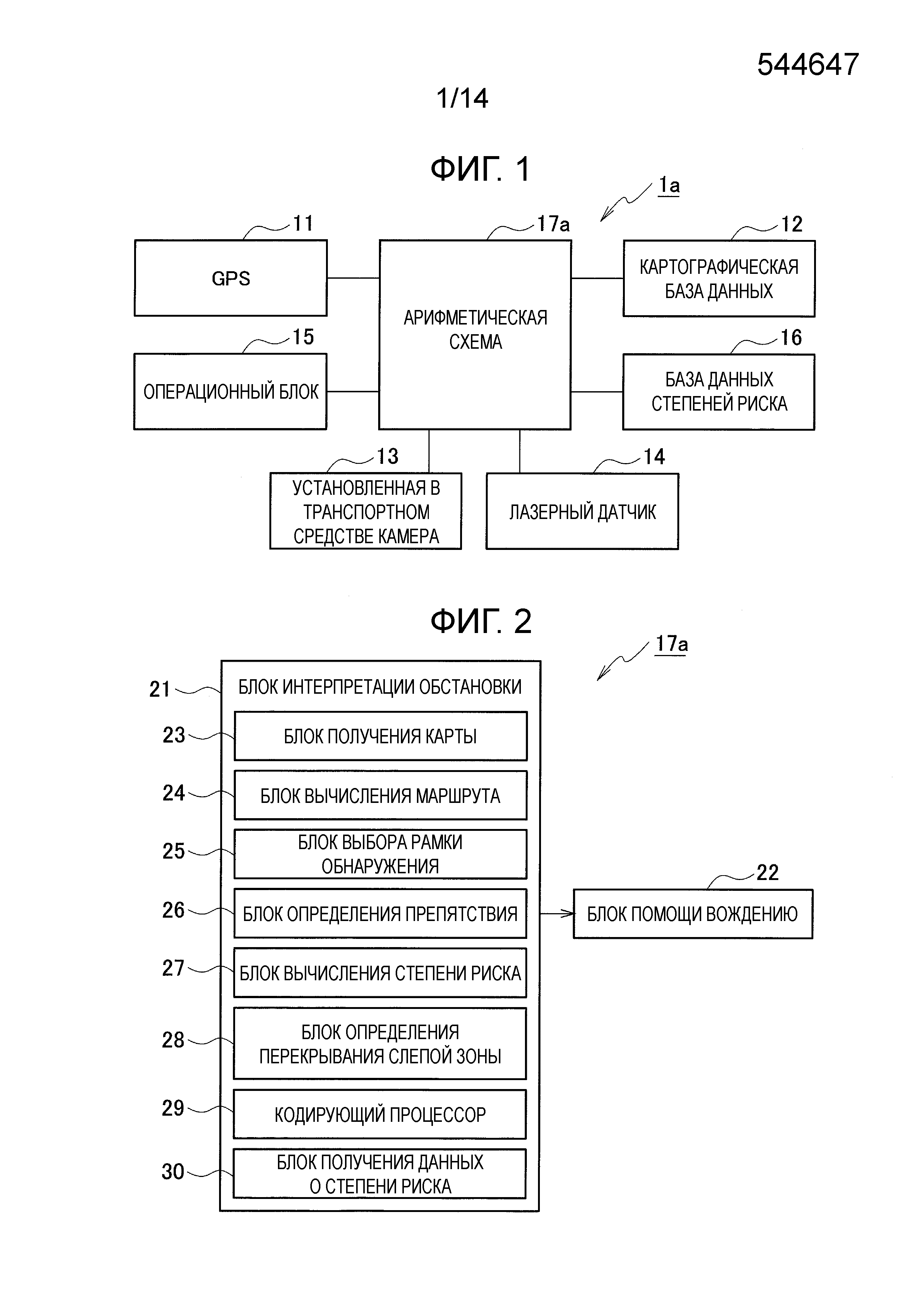
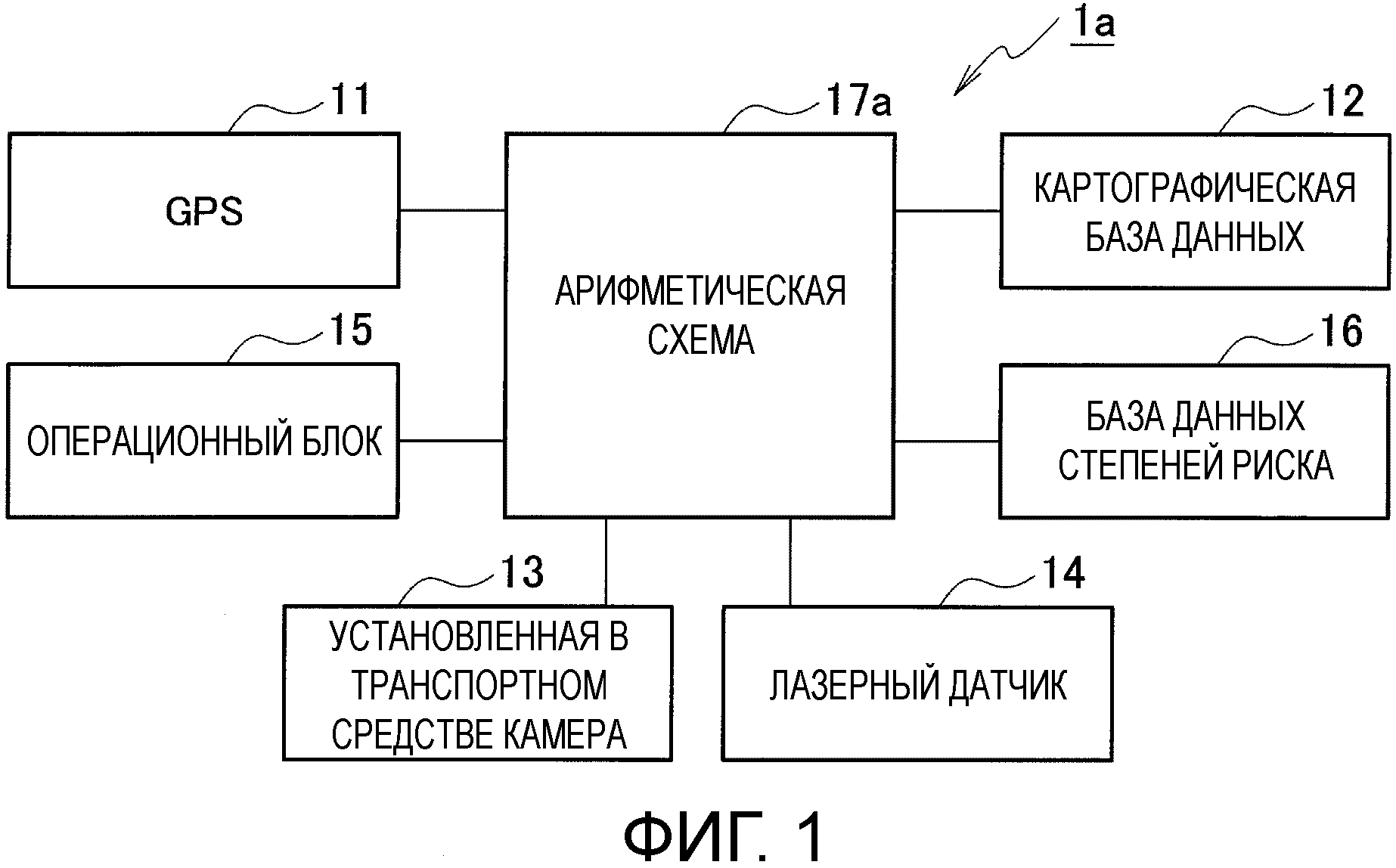
[0007] Фиг. 1 является блок-схемой, показывающей общую конфигурацию устройства 1a помощи вождению, включающего в себя устройство интерпретации обстановки первого варианта осуществления.
Фиг. 2 - это блок-схема, показывающая множество схем обработки, сконфигурированных посредством арифметической схемы 17a.
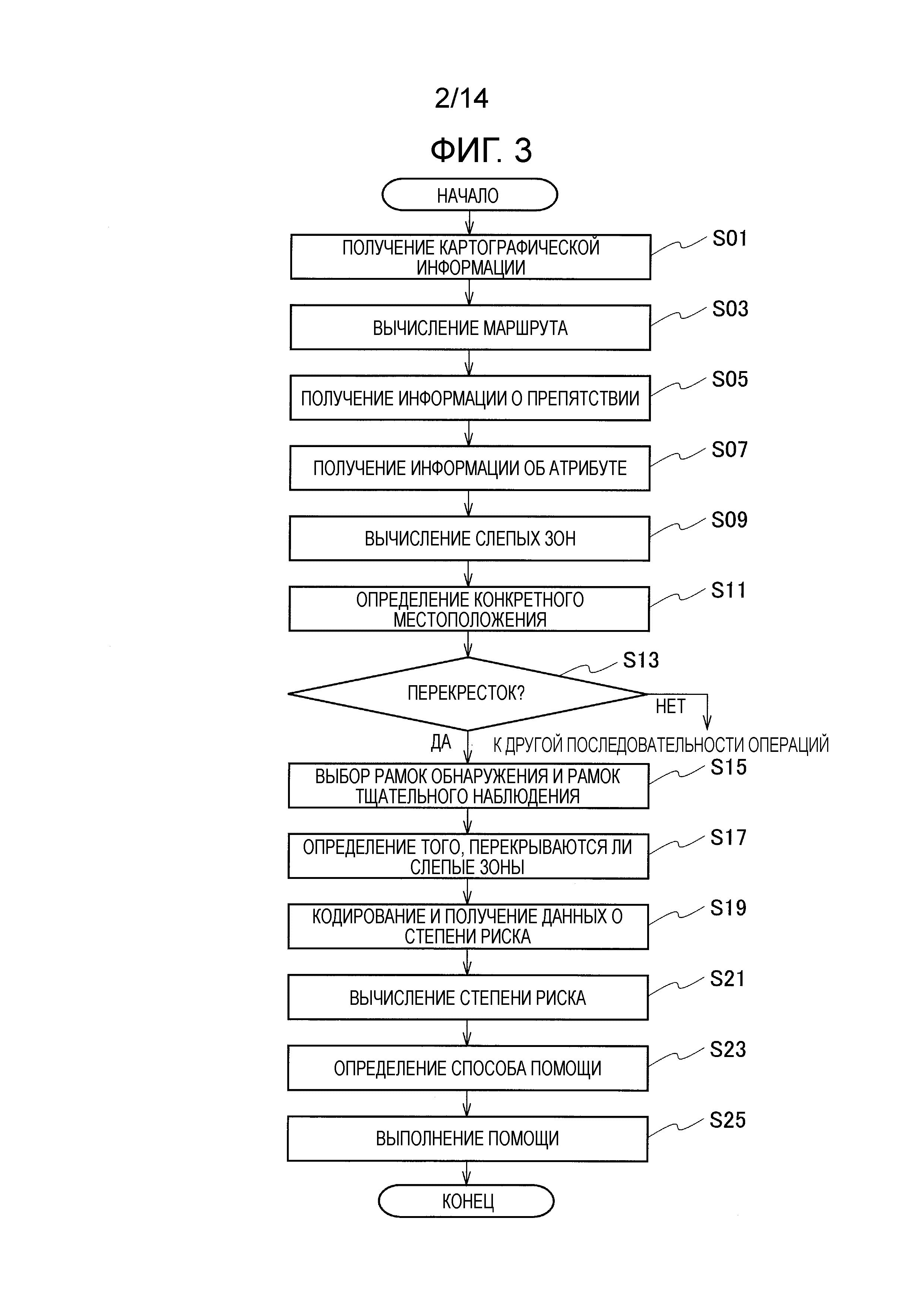
Фиг. 3 - это блок-схема последовательности операций, показывающая пример способа помощи вождению, включающего в себя способ интерпретации обстановки первого варианта осуществления.
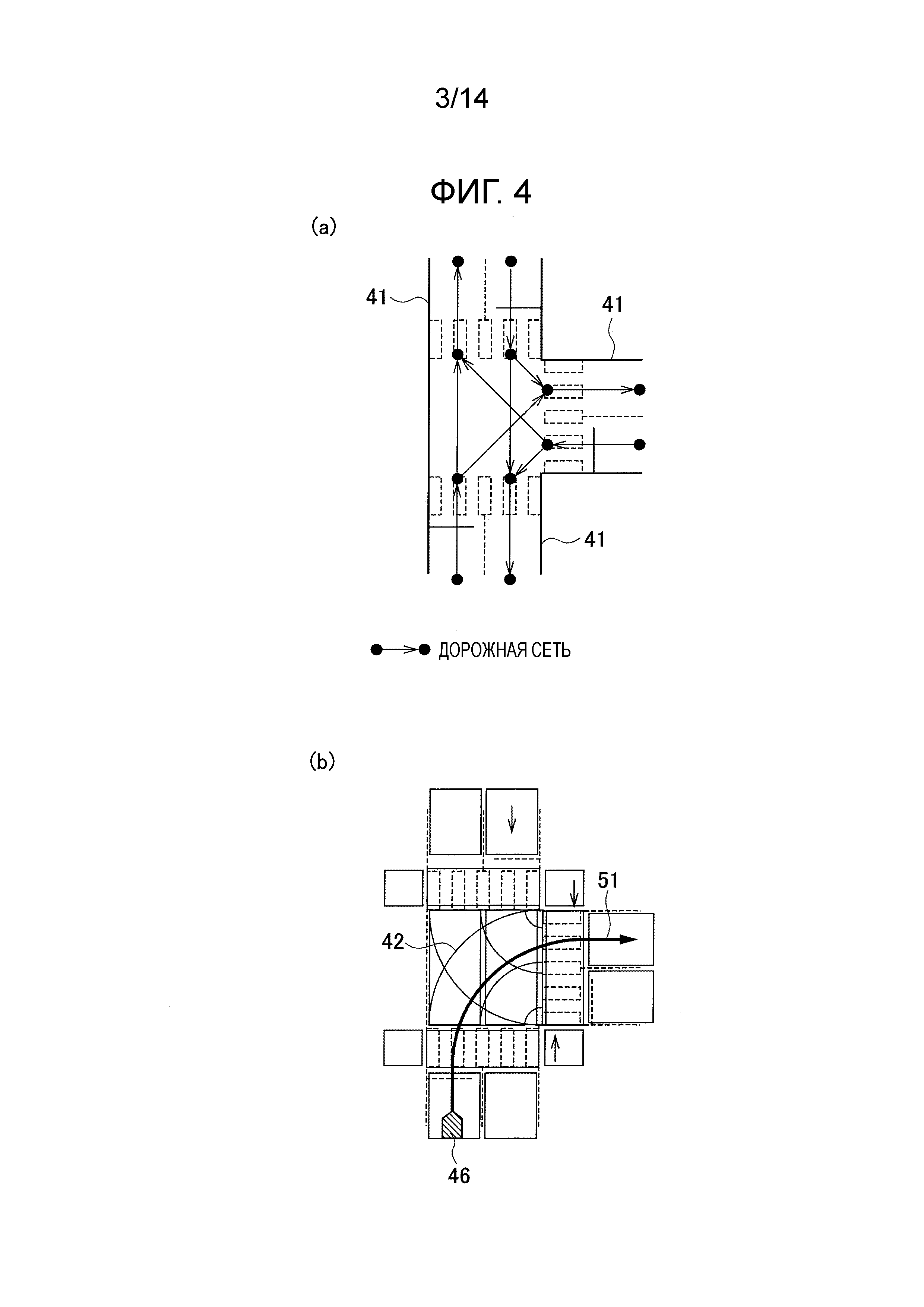
Фиг. 4(a) -это вид сверху, показывающий пример информации о бордюре, о том, где бордюр 41 находятся в трехпутном месте соединения, или информации о дорожной сети в трехпутном месте соединения. Фиг. 4(b) -это вид сверху, показывающий примеры рамки 42 обнаружения препятствия, которая должна быть задана для трехпутного места соединения.
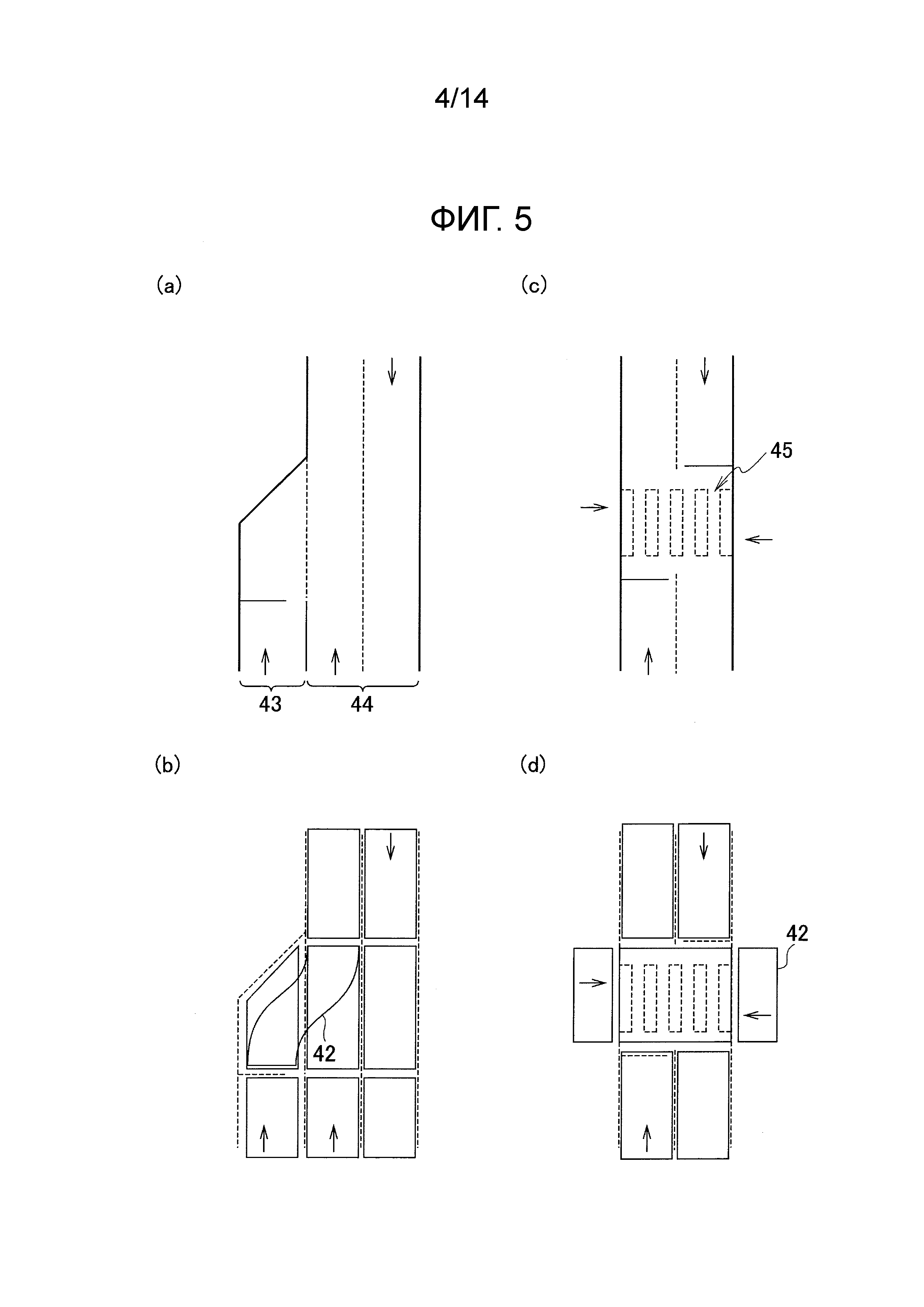
Фиг. 5(a) -это вид сверху, показывающий пример места соединения, а фиг. 5(b) -это вид сверху, показывающий примеры рамки 42 обнаружения препятствия, которая должна быть задана для места соединения. Фиг. 5(c) -это вид сверху, показывающий пример пешеходного перехода 45, а фиг. 5(b) -это вид сверху, показывающий примеры рамки 42 обнаружения препятствия, которая должна быть задана для пешеходного перехода 45.
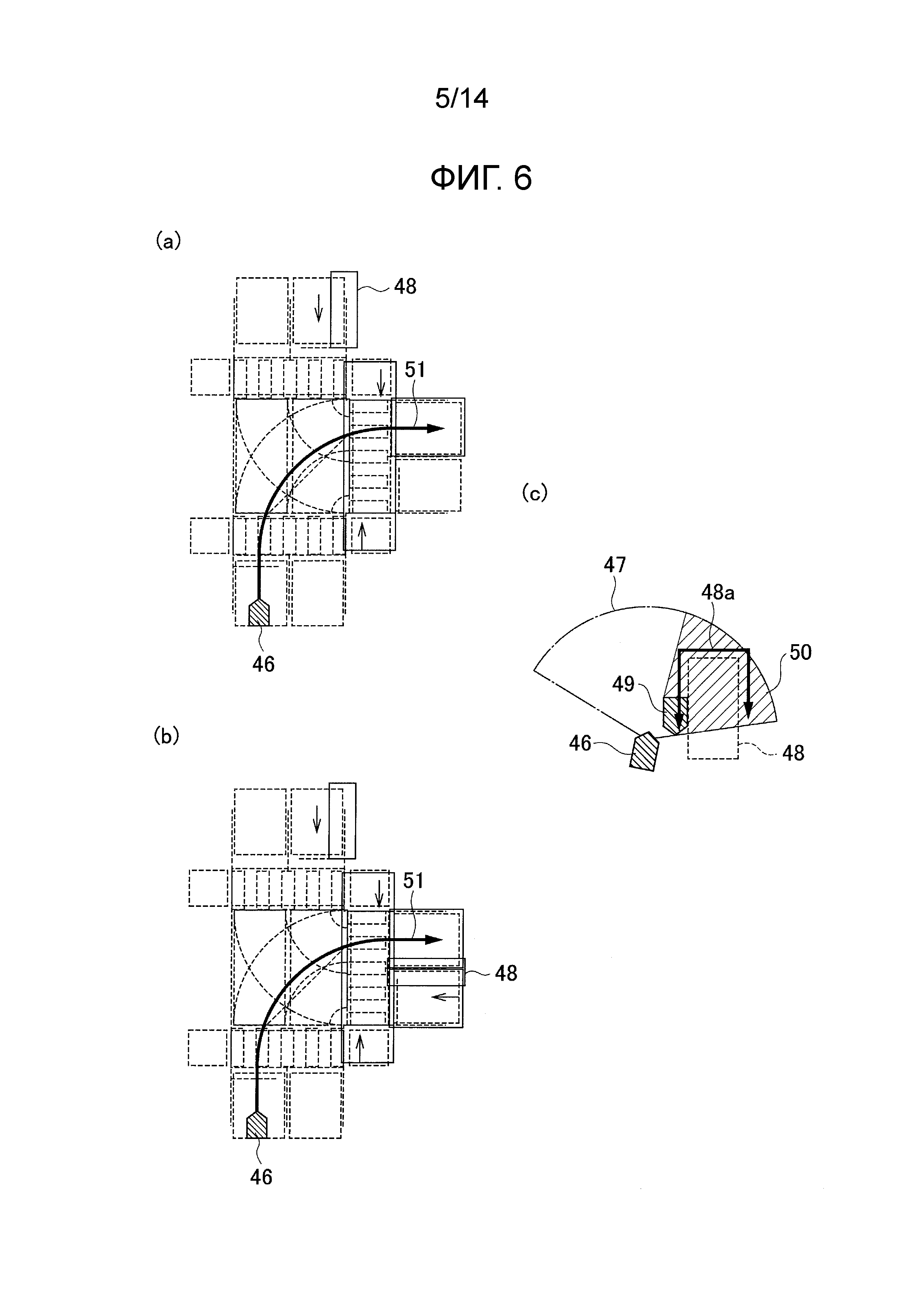
Фиг. 6(a) -это вид сверху, показывающий примеры рамки 48 тщательного наблюдения, которая должна быть задана для трехпутного места соединения со светофорами. Фиг. 6(a) -это вид сверху, показывающий примеры рамки 48 тщательного наблюдения, которая должна быть задана для трехпутного места соединения без светофоров. Фиг. 6(c) -это вид сверху, показывающий, как слепая зона, вызванная препятствием 49, и рамка 48 тщательного наблюдения перекрывают друг друга.
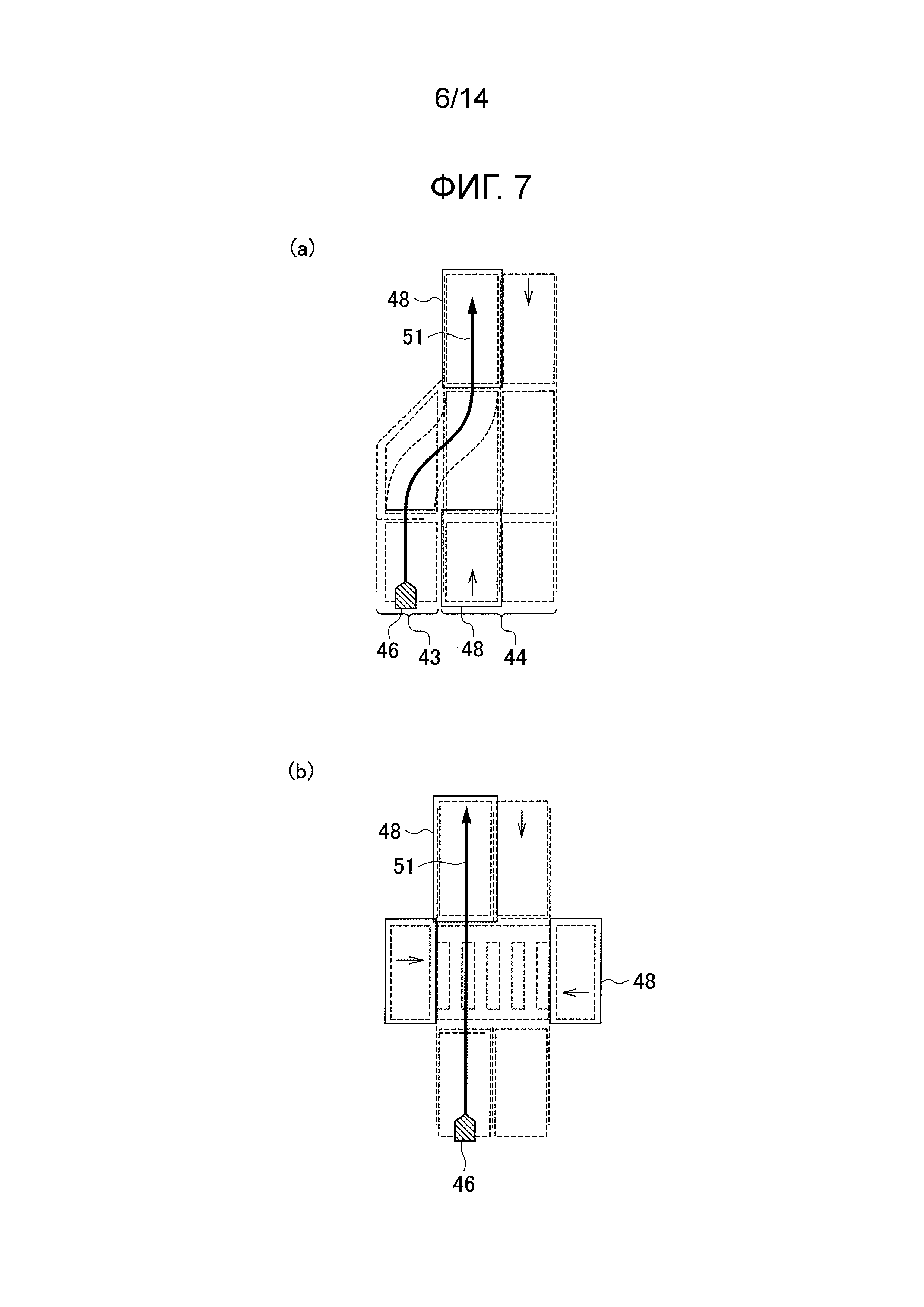
Фиг. 7(a) - это вид сверху, показывающий примеры рамки 48 тщательного наблюдения, которая должна быть задана для места соединения. Фиг. 7(b) - это вид сверху, показывающий примеры рамки 48 тщательного наблюдения, которая должна быть задана для пешеходного перехода.
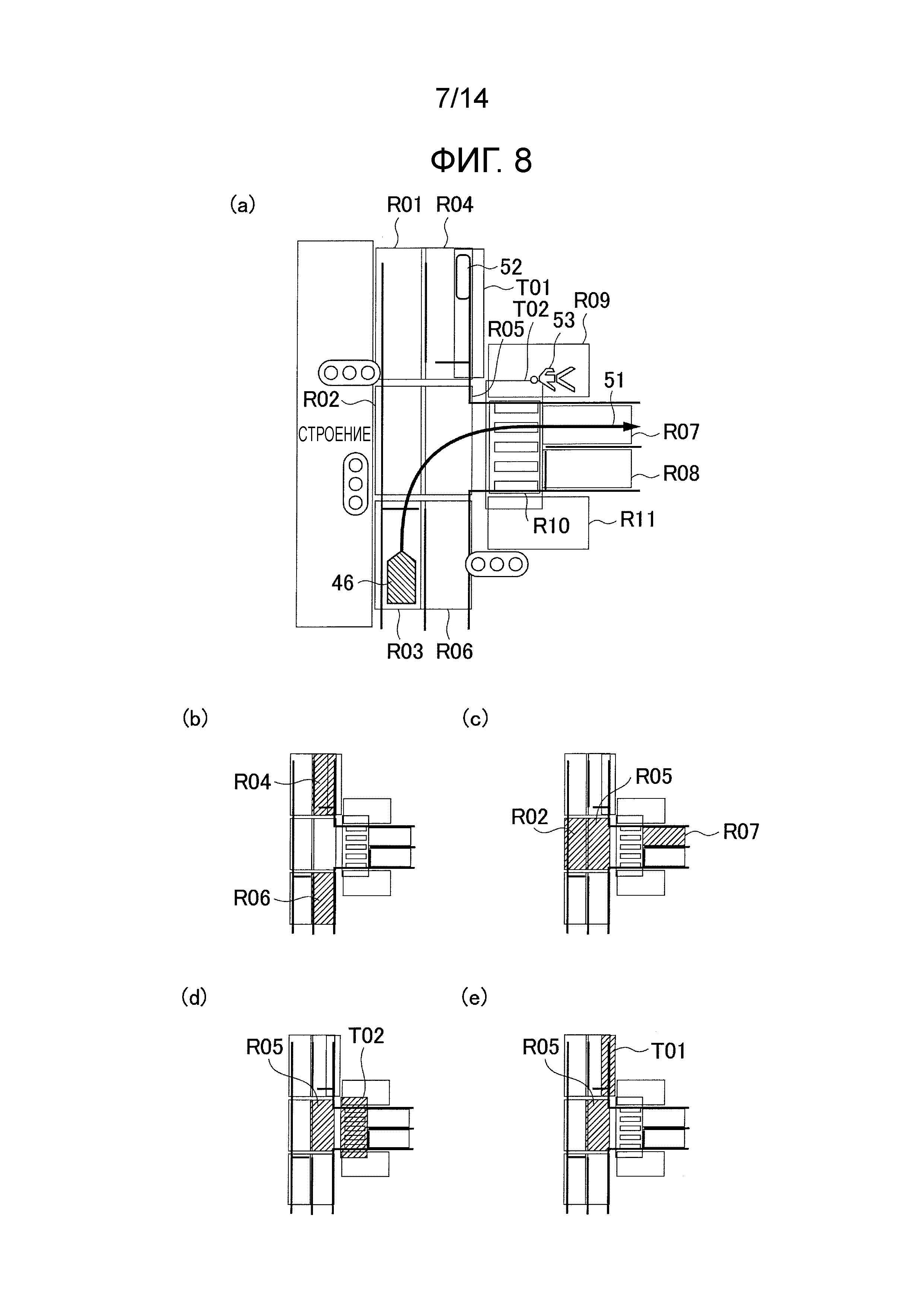
Фиг. 8(a) - это вид сверху, показывающий трехпутное место соединения, для которого заданы 11 рамок (R01-R11) обнаружения препятствия и две рамки (T01, T02) тщательного наблюдения. Фиг. 8(b)-8(e) - это виды сверху, показывающие примеры того, как сочетать рамки (R01-R11) обнаружения препятствий, включающие в себя препятствия, с рамками (T01, T02) тщательного наблюдения, перекрывающими слепые зоны для трехпутного места соединения, показанного на фиг. 8(a).
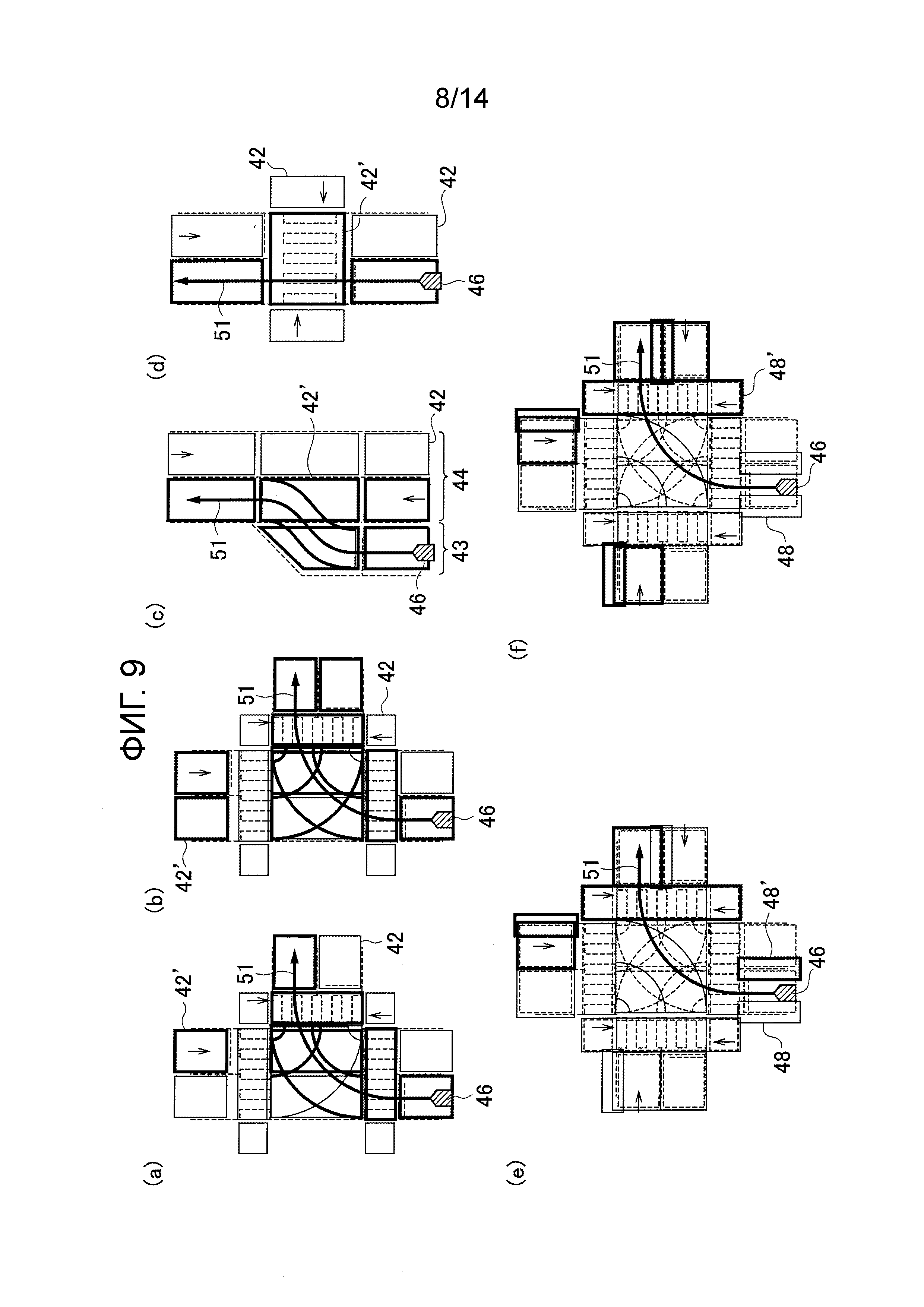
Фиг. 9(a)-9(d) - это виды сверху, показывающие примеры рамки 42' обнаружения препятствия, которая должна быть выбрана посредством устройства 25 выбора рамки обнаружения. Фиг. 9(e) и 9(f) -это виды сверху, показывающие примеры рамки 48' тщательного наблюдения, которая должна быть выбрана посредством устройства 25 выбора рамки обнаружения.
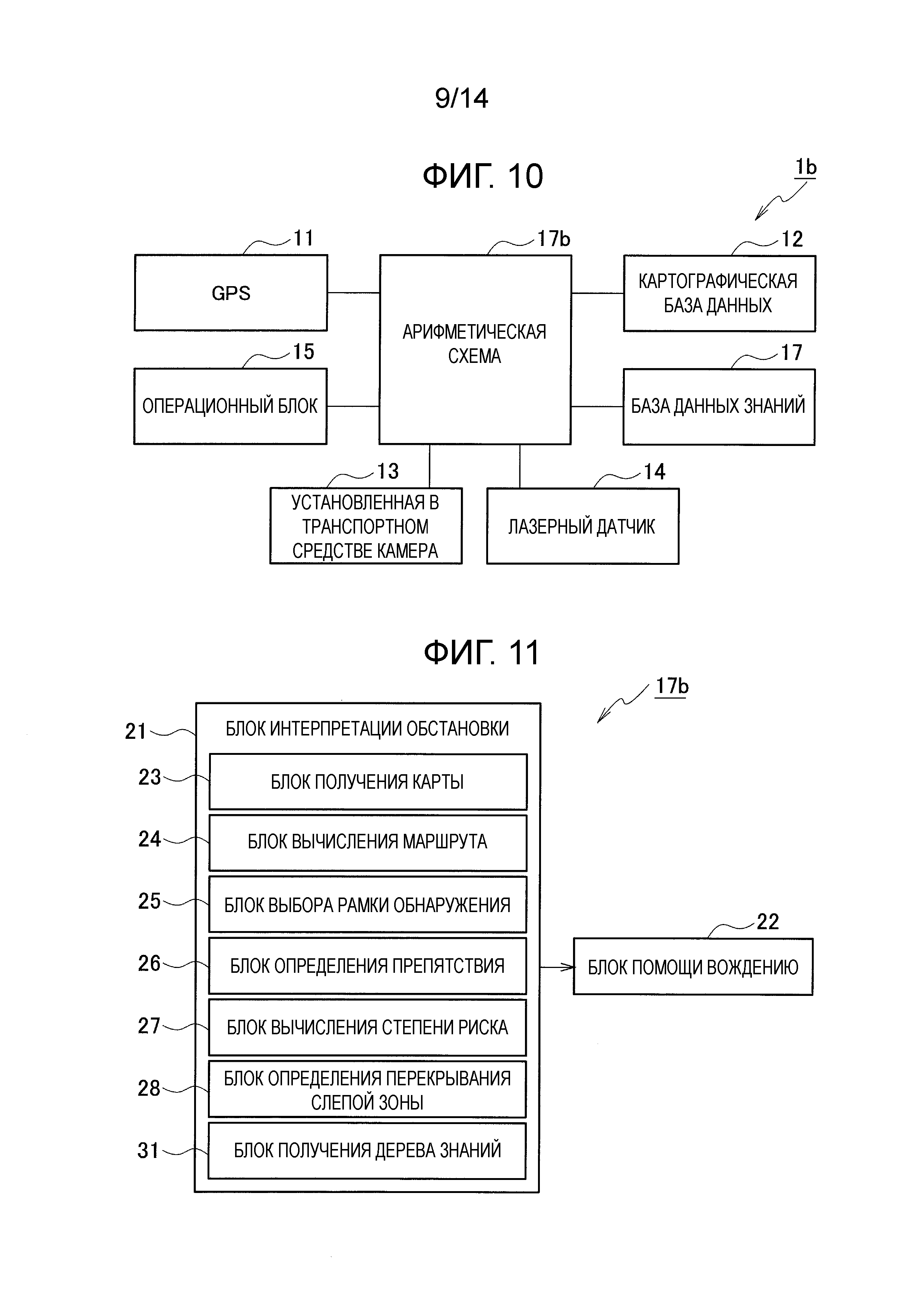
Фиг. 10 является блок-схемой, показывающей общую конфигурацию устройства 1b помощи вождению, включающего в себя устройство интерпретации обстановки второго варианта осуществления.
Фиг. 11 - это блок-схема, показывающая множество схем обработки, сконфигурированных посредством арифметической схемы 17b.
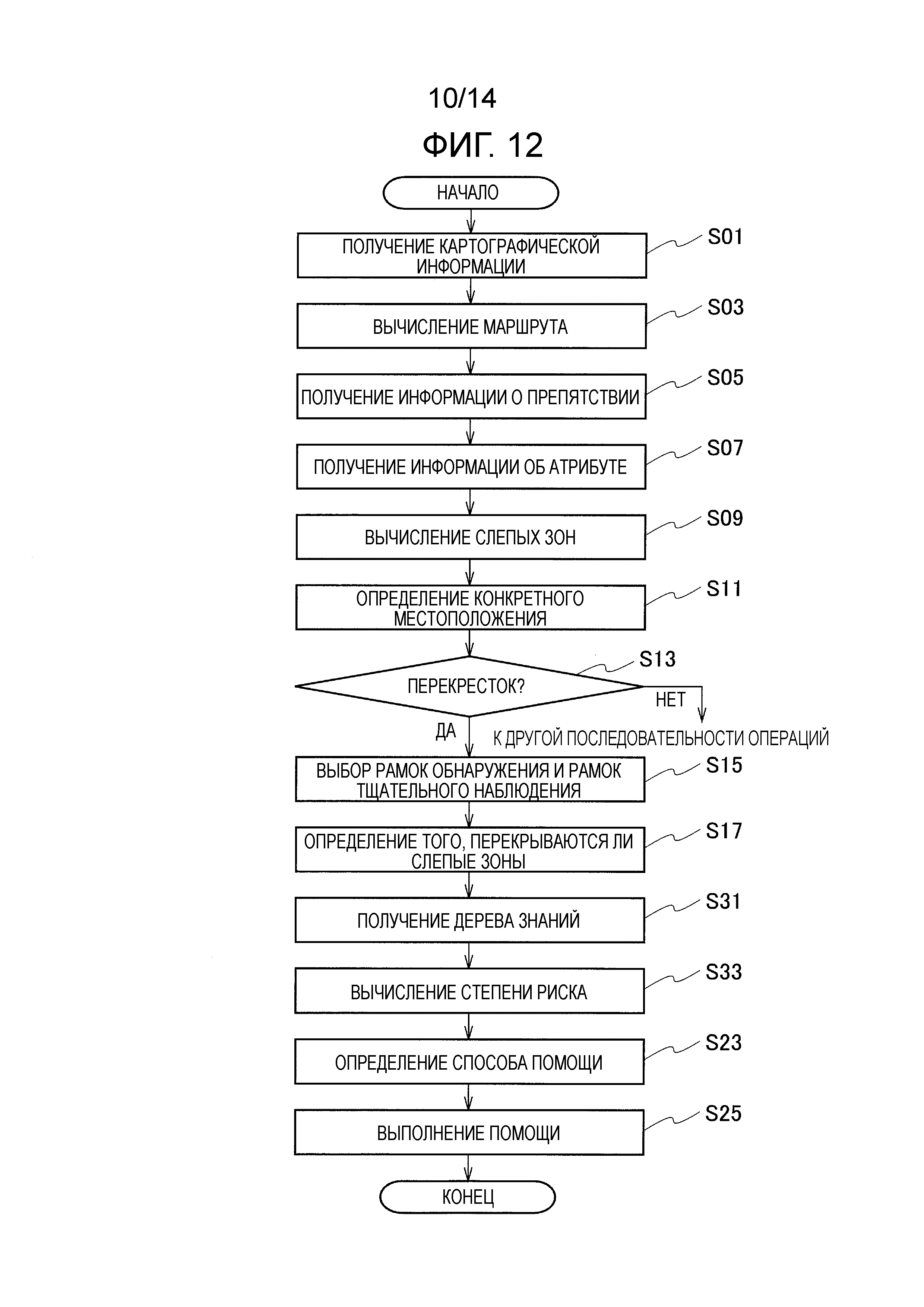
Фиг. 12 - это блок-схема последовательности операций, показывающая пример способа помощи вождению, включающего в себя способ интерпретации обстановки второго варианта осуществления.
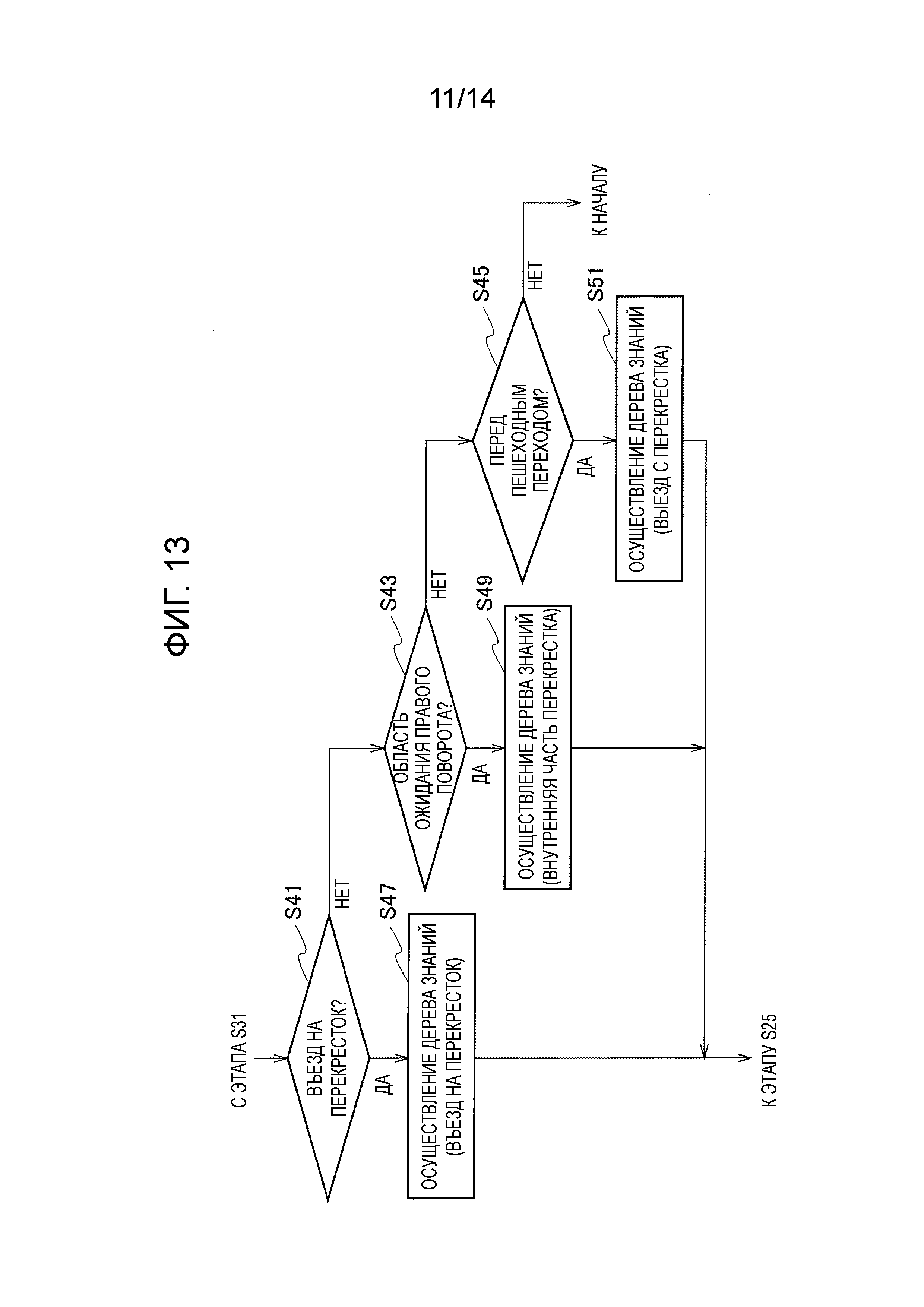
Фиг. 13 - это блок-схема последовательности операций, показывающая подробную процедуру для этапов S33 и S23 на фиг. 12.
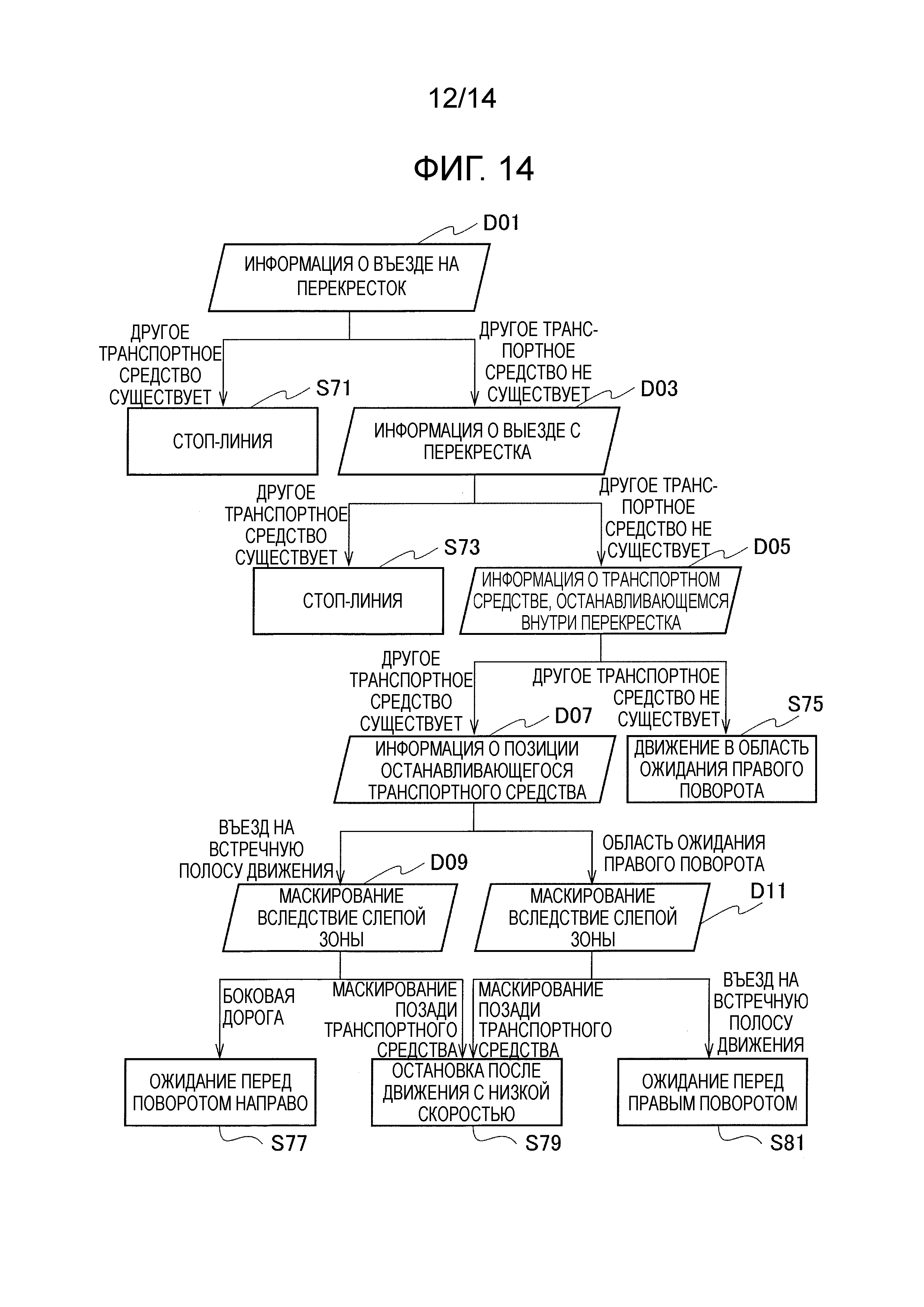
Фиг. 14 - это блок-схема последовательности операций, показывающая подробную процедуру для дерева знаний (для въезда на место соединения), показанное для этапа S47 на фиг. 13.
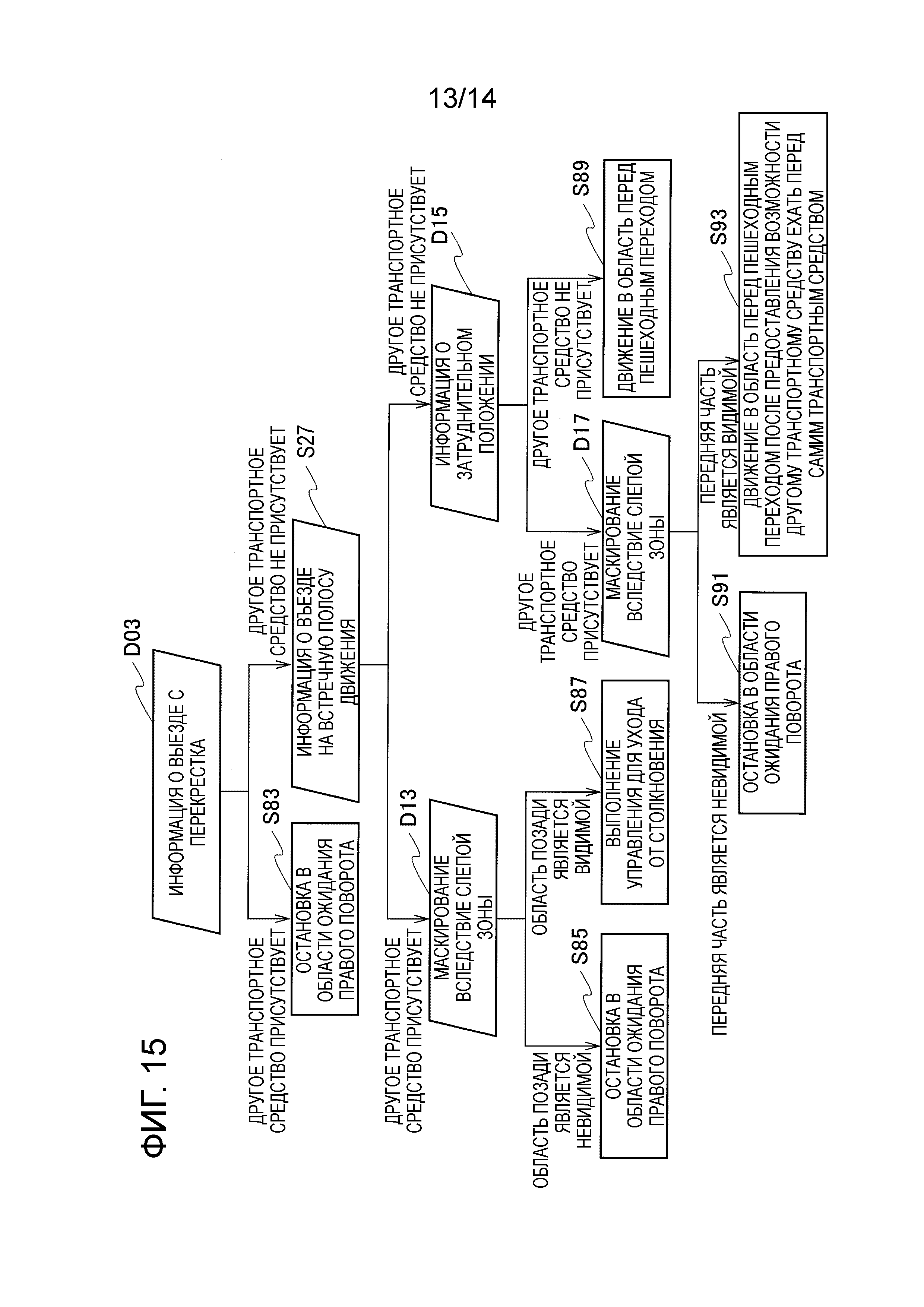
Фиг. 15 - это блок-схема последовательности операций, показывающая подробную процедуру для дерева знаний (для внутренней части места соединения), показанное для этапа S49 на фиг. 13.
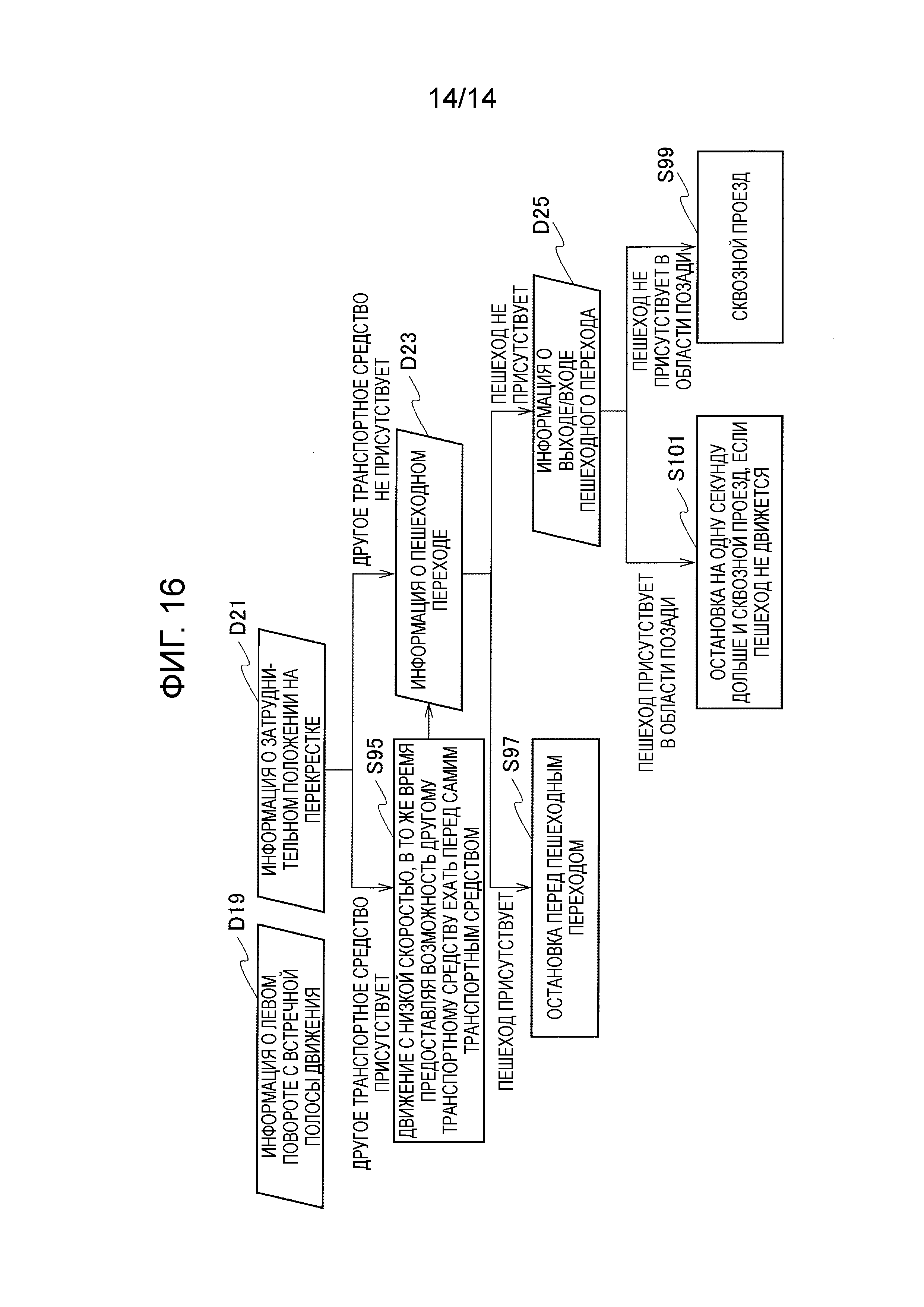
Фиг. 16 - это блок-схема последовательности операций, показывающая подробную процедуру для дерева знаний (для выезда с места соединения), показанное для этапа S51 на фиг. 13.
Подробное описание вариантов осуществления
[0008] Далее, со ссылкой на чертежи, подробные описания будут предоставлены для вариантов осуществления настоящего изобретения.
[0009] [Первый вариант осуществления]
Обращаясь к фиг. 1, описания будут предоставлены для общей конфигурации устройства 1a помощи вождению, включающего в себя устройство интерпретации обстановки в первом варианте осуществления. Устройство 1a помощи вождению является устройством, которое выполняет помощь вождению, определяя, как осуществлять движение рассматриваемого транспортного средства (способ помощи вождению), на основе степени риска (обстановки) столкновения между рассматриваемым транспортным средством и другим транспортным средством или пешеходом в конкретном местоположении на его запланированном маршруте движения. Устройство интерпретации обстановки является устройством, которое вычисляет степень риска или интерпретирует обстановку. Конкретное местоположение - это место на дороге, где транспортное средство в ином случае столкнется с другим транспортным средством или пешеходом. Примеры конкретного местоположения включают в себя перекресток, где встречаются три или более дорог, развязку автомагистрали и пешеходный переход. Соответственно, когда рассматриваемое транспортное средство движется в конкретном местоположении, устройство интерпретации обстановки обнаруживает другие транспортные средства или пешеходов в и около конкретного местоположения и вычисляет риск столкновения между рассматриваемым транспортным средством и другим транспортным средством или пешеходом. Таким образом, для того, чтобы предоставлять возможность рассматриваемому транспортному средству двигаться через конкретное местоположение безопасно, устройство 1a помощи вождению определяет, как осуществлять движение рассматриваемого транспортного средства (способ помощи вождению) на основе степени риска, и, таким образом, выполняет помощь вождению.
[0010] Устройство 1a помощи вождению включает в себя GPS 11, картографическую базу данных 12, установленную в транспортном средстве камеру 13, лазерный датчик 14, операционный блок 15, базу данных 16 степеней риска и арифметическую схему 17a. GPS 11 является примером датчика позиции транспортного средства, которая обнаруживает текущую позицию рассматриваемого транспортного средства. Картографическая база данных 12 является примером хранилища карт для хранения картографических данных. Установленная в транспортном средстве камера 13 и лазерный датчик 14 являются примерами датчика препятствия, который обнаруживает позиции препятствий, присутствующих вокруг транспортного средства. Операционный блок 15 является элементом для приема инструкций от водителя рассматриваемого транспортного средства и включает в себя микрофон, сенсорную панель, размещенную на инструментальной панели, и переключатель рулевого управления. База данных 16 степеней риска хранит соотношения между комбинациями рамок обнаружения препятствия, включающих в себя препятствия, и степенями риска. База данных 16 степеней риска и рамки обнаружения препятствия будут описаны позже.
[0011] Арифметическая схема 17a является схемой, которая выполняет последовательность арифметических процессов для: вычисления степени риска с помощью информации о препятствии и картографической информации; и, таким образом, выполнения помощи вождению. Арифметическая схема 17a является, например, микрокомпьютером общего назначения, включающим в себя CPU, RAM, ROM, память и схему управления вводом/выводом. Компьютерная программа, в которой описывается последовательность арифметических процессов, устанавливается в микрокомпьютере заранее. Исполняя компьютерную программу, микрокомпьютер конструирует множество схем обработки для исполнения вышеупомянутой последовательности арифметических процессов. Множество схем обработки, сконструированных посредством арифметической схемы 17a, описываются позже со ссылкой на фиг. 2.
[0012] GPS 11 измеряет позицию рассматриваемого транспортного средства в реальном времени, принимая электрические волны от спутников NAVSTAR в системе глобального позиционирования. Для каждого конкретного местоположения одна, две или более рамок обнаружения препятствия, имеющих форму, соответствующую структуре дороги, для обнаружения препятствий задаются заранее в картографических данных, сохраненных в картографической базе данных 12. Установленная в транспортном средстве камера 13 устанавливается на рассматриваемое транспортное средство и получает окружающие изображения, снимая окружающую обстановку для рассматриваемого транспортного средства. Арифметическая схема 17a анализирует окружающие изображения и, тем самым, определяет, присутствует ли препятствие около рассматриваемого транспортного средства, и где препятствие, если присутствует, располагается. Лазерный датчик 14 излучает импульсы лазерного света, обнаруживает свет, отражаемый от препятствия, таким образом, обнаруживая расстояние от рассматриваемого транспортного средства до препятствия и азимут препятствия относительно рассматриваемого транспортного средства.
[0013] Обращаясь к фиг. 2, описания будут предоставлены для множества схем обработки, сконструированных посредством арифметической схемы 17a. В качестве множества схем обработки арифметическая схема 17a включает в себя блок 21 интерпретации обстановки для определения способа помощи вождению посредством вычисления степени риска, и блок 22 помощи вождению для выполнения определенной помощи вождению. Блок 21 интерпретации обстановки включает в себя блок 23 получения карты, блок 24 вычисления маршрута, блок 25 выбора рамки обнаружения, блок 26 определения препятствия, блок 27 вычисления степени риска, блок 28 определения перекрывания слепой зоны, кодирующий процессор 29 и блок 30 получения данных о степени риска.
[0014] Блок 22 помощи вождению выполняет помощь вождению в соответствии с тем, как осуществлять движение рассматриваемого транспортного средства (способ помощи вождению), которое определяется посредством блока 21 интерпретации обстановки. Выражаясь конкретно, помощь вождению может быть автономным управлением вождением, в котором устройство 1a помощи вождению автономно выполняет всю операцию вождения, включающую в себя операцию рулевого управления и работу педалей, приводя в действие различные актуаторы. Иначе, помощь вождению может быть помощью, в которой посредством пяти чувств водителя, таких как слух, зрение и осязание, устройство 1a помощи вождению предоставляет водителю инструкции, советы или подсказки относительно того, как водитель должен выполнять операцию вождения.
[0015] Блок 24 вычисления маршрута вычисляет запланированный маршрут движения от текущей позиции рассматриваемого транспортного средства, измеренного посредством GPS 11 до пункта назначения, принятого посредством операционного блока 15. Впрочем, вариант осуществления будет описывать случай, когда устройство 1a помощи вождению или устройство понимания сцены имеет функцию автономного выполнения арифметических действий по запланированному маршруту движения. Однако, устройство 1a помощи вождению или устройство интерпретации обстановки могут получать запланированный маршрут движения, вычисленный посредством устройства вычитания, извне.
[0016] Блок 23 получения карты получает картографические данные по запланированному маршруту движения из картографической базы данных 12. Блок 23 получения карты считывает конкретные местоположения на запланированном маршруте движения и рамки обнаружения препятствия, заданные для каждого конкретного местоположения. Цифровая карта может быть использована в качестве картографических данных. Цифровая карта включает в себя информацию о бордюре, о том, где бордюр 41 располагается, или информацию о дорожной сети, показанную на фиг. 4(a). Информация о бордюре используется, чтобы вычислять область с возможностью движения для рассматриваемого транспортного средства. Информация о дорожной сети используется, чтобы получать область, где рассматриваемое транспортное средство будет иметь возможность двигаться в следующий момент времени. Цифровая карта дополнительно включает в себя информацию о рамках обнаружения препятствия, которые имеют форму, соответствующую структуре дороги.
[0017] Хотя вариант осуществления показывает случай, когда картографическая база данных 12 предусматривается на борту транспортного средства, картографическая база данных 12 не ограничивается этим. Картографическая база данных 12 может быть сохранена на сервере вне транспортного средства. В этом случае блок 23 получения карты может получать картографические данные извне транспортного средства через сеть. Это также является случаем с базой данных 16 степеней риска. Кроме того, рамки обнаружения препятствия могут быть заданы в картографической базе данных 12 с самого начала.
[0018] Как показано на фиг. 4(b), множество рамок 42 обнаружения препятствия, имеющих форму, соответствующую структуре дороги, задаются для одной конкретной точки (например, трехпутного места соединения). Рамки 42 обнаружения препятствия задаются для въездов и выездов с перекрестка, внутренней части перекрестка, пешеходных переходов, фрагментов тротуаров, примыкающих к пешеходным переходам, и т.п. Внутри перекрестка рамки 42 обнаружения препятствия задаются для прямых маршрутов, маршрутов с правым поворотом и левым поворотом, проходящих через перекресток.
[0019] Другой пример конкретного местоположения, где транспортное средство в ином случае столкнется с другим транспортным средством, является точкой слияния, где, как показано на фиг. 5(a) и 5(b), переходно-скоростная полоса 43 ускорения (включающая в себя ответвляющуюся полосу) сливается в полосу 44 сквозного движения. Пример конкретного местоположения, где транспортное средство в ином случае столкнется с пешеходом, является пешеходным переходом 45, как показано на фиг. 5(c) и 5(d). В этих конкретных местоположениях, также, множество рамок 42 обнаружения препятствия задаются для предварительно обнаруживаемого дорожного движения (въезд в место действия), обнаруживаемого дорожного движения (внутри места действия) и пост-обнаружения (выезд с места действия).
[0020] Блок 26 определения препятствия определяет, существует ли препятствие в рамках обнаружения препятствия, заданных для конкретного местоположения на запланированном маршруте движения. Блок 26 определения препятствия определяет, попадает ли местоположение препятствия, обнаруженного посредством установленной в транспортном средстве камеры 13 и лазерного датчика 14, в рамки обнаружения препятствия.
[0021] Блок 27 вычисления степени риска вычисляет степень риска в конкретном местоположении на основе результата определения того, существует ли препятствие. Конкретный способ вычисления степени риска будет описан позже, но не ограничивается описаниями, которые будут предоставлены для способа позже. Уже известный способ, например, способ, перечисленный в патентной литературе 1) может быть использован в зависимости от необходимости.
[0022] Из информации о бордюре или информации о дорожной сети блок 21 интерпретации обстановки получает область движения, где рассматриваемое транспортное средство будет двигаться в дальнейшем. В случае, когда конкретное местоположение включается в область движения, блок 21 интерпретации обстановки считывает рамки обнаружения препятствия, заданные для конкретного местоположения. Препятствие обнаруживается с помощью внешних воспринимающих устройств (установленной в транспортном средстве камеры 13 и лазерного датчика 14), установленных на транспортном средстве. Блок 21 интерпретации обстановки определяет, включено ли обнаруженное препятствие в рамки обнаружения препятствия. В случае, когда препятствие существует в предварительно определенных рамках обнаружения препятствия, заданных для конкретного местоположения, блок 21 интерпретации обстановки определяет, что конкретное местоположение является опасным. Степень риска может быть задана для каждой рамки обнаружения препятствия и может быть задана по-разному для каждой рамки обнаружения препятствия. Другими словами, когда степень риска вычисляется, степень риска по-разному взвешивается для каждой рамки обнаружения препятствия.
[0023] Как описано выше, блок 21 понимания сцены вычисляет степень риска в конкретном местоположении на основе того, существует ли препятствие в рамках 42 обнаружения препятствия, заданных заранее в картографических данных. Таким образом, препятствия, которые обнаруживаются в позициях, в которых ничего не делается с вычислением степени риска, могут быть исключены из того, что блок 21 интерпретации обстановки обрабатывает. Соответственно, представляется возможным препятствовать избыточному увеличению арифметической нагрузки.
[0024] В картографических данных, сохраненных в картографической базе данных 12, не только рамки обнаружения препятствия, но также рамки тщательного наблюдения, которые должны тщательно наблюдаться с точки зрения того, перекрывают ли рамки тщательного наблюдения слепые зоны, вызванные препятствиями, могут быть заданы заранее для каждого конкретного местоположения. В этом случае блок 23 получения карты получает картографические данные, где рамки тщательного наблюдения заданы заранее для конкретного местоположения. Как показано на фиг. 2, блок 21 интерпретации обстановки дополнительно включает в себя блок 28 определения перекрывания слепой зоны, который определяет, перекрывают ли слепые зоны, вызванные препятствиями, рамки тщательного наблюдения. На основе результата определения того, перекрывают ли слепые зоны, вызванные препятствиями, рамки тщательного наблюдения, блок 27 вычисления степени риска вычисляет степень риска в каждом конкретном местоположении. Это делает возможным вычисление степени риска в конкретном местоположении при предположении, что существуют препятствия в слепых зонах.
[0025] Рамка 48 тщательного наблюдения задается для места, где слепая зона вероятно должна возникать вследствие существования другого транспортного средства, здания или стены. Кроме того, рамка 48 тщательного наблюдения задается для места, которое будет опасным, когда другое транспортное средство или пешеход выходит из слепой зоны. Место, для которого необходимо предоставлять рамку 48 тщательного наблюдения, изменяется в зависимости от маршрута рассматриваемого транспортного средства 46 и направления, в котором рассматриваемое транспортное средство 46 приближается к конкретному местоположению. Даже в случае, когда рассматриваемое транспортное средство приближается к тому же конкретному местоположению после движения по тому же маршруту, места, для которых необходимо предоставлять рамку тщательного наблюдения, и число рамок тщательного наблюдения могут изменяться в зависимости от случаев. Например, число рамок тщательного наблюдения, необходимых для конкретного местоположения, изменяется в зависимости от того, существуют ли светофоры в конкретном местоположении.
[0026] Фиг. 6 (a) показывает примеры рамки 48 тщательного наблюдения, которая должна быть задана для трехпутного места соединения со светофорами. Когда существует другое транспортное средство на въезде на встречную полосу движения, велодорожка на стороне транспортного средства вероятно должна попадать в слепую зону. Когда транспортное средство, движущееся впереди, находится внутри перекрестка, слепая зона вероятно должна возникать на и рядом с пешеходным переходом, а также на и рядом с выездом с полосы движения, по которой движется рассматриваемое транспортное средство. По этой причине рамка 48 тщательного наблюдения задается для этих мест, которые вероятно должны попадать в слепую зону.
[0027] Фиг. 6 (b) показывает примеры рамки 48 тщательного наблюдения, которая должна быть задана для трехпутного места соединения без светофоров. Обстановка, в которой другое транспортное средство въезжает на перекресток с другой дороги, пересекающей дорогу, по которой движется рассматриваемое транспортное средство 46, должна быть принята во внимание, чтобы вычислять степень риска. Когда транспортное средство, движущееся впереди, находится внутри перекрестка, слепая зона вероятно должна возникать на и рядом с пешеходным переходом, а также на и рядом с выездом с него. Слепая зона вероятно должна возникать на въезде на встречную полосу движения на другой дороге вследствие транспортного средства, движущегося впереди. По этой причине, рамка 48 тщательного наблюдения задается для въезда на встречную полосу движения на другой дороге.
[0028] Блок 27 вычисления степени риска вычисляет степень риска из того, насколько слепая зона 50, полученная посредством датчика, прикрепленного к рассматриваемому транспортному средству 46, перекрывает рамку 48 тщательного наблюдения. Например, блок 27 вычисления степени риска вычисляет степень риска из пропорции площади, где слепая зона и рамка 48 тщательного наблюдения перекрывают друг друга, к площади рамки 48 тщательного наблюдения. Иначе, блок 27 вычисления степени риска может вычислять степень риска из пропорции длины 48a рамки 48 тщательного наблюдения, перекрывающей слепую зону, к внешнему периметру рамки 48 тщательного наблюдения. Блок 27 вычисления степени риска способен вычислять более высокую степень риска, когда значение, представляющее, насколько слепая зона 50, полученная посредством датчика, прикрепленного к рассматриваемому транспортному средству 46, перекрывает рамку 48 тщательного наблюдения, больше контрольного значения, поскольку более высокое значение означает более плохую видимость.
[0029] В случае, когда, как показано на фиг. 7(a), существует стена между переходно-скоростной полосой 43 ускорения и полосой 44 сквозного движения в точке слияния, область за стеной вероятно должна попадать в слепую зону. Кроме того, в случае, когда транспортное средство, движущееся впереди, меняет полосы движения с переходно-скоростной полосы 43 ускорения на полосу 44 сквозного движения, слепая зона вероятно должна возникать в и рядом с областью за местом, где транспортное средство вливается в полосу 44 сквозного движения. По этим причинам рамка 48 тщательного наблюдения задается для этих мест, которые вероятно должны попадать в слепую зону. Впрочем, когда рассматриваемое транспортное средство 46 въезжает на полосу 44 сквозного движения с переходно-скоростной полосы 43 ускорения, задаются множество рамок 48 тщательного наблюдения. Однако, в случае, когда рассматриваемое транспортное средство 46 движется только прямо вперед по полосе 44 сквозного движения, для которой право преимущественного движения предоставляется над переходно-скоростной полосой 43 ускорения, рамка тщательного наблюдения не предоставляется.
[0030] В случае, когда, как показано на фиг. 7(b), транспортное средство, движущееся впереди, находится на пешеходном переходе, место на стороне пешеходного перехода вероятно должно попадать в слепую зону. Кроме того, в случае, когда пешеход идет по пешеходному переходу, место за пешеходом вероятно должно попадать в слепую зону. По этим причинам рамка 48 тщательного наблюдения предоставляется для этих мест, которые вероятно должны попадать в слепую зону.
[0031] В первом варианте осуществления, на основе комбинаций рамок 42 обнаружения препятствия, включающих в себя препятствия, блок 27 вычисления степени риска вычисляет степень риска в конкретном местоположении. Поскольку блок 27 вычисления степени риска не должен вычислять степень риска для каждой рамки 42 обнаружения препятствия, представляется возможным препятствовать избыточному увеличению арифметической нагрузки. Кроме того, блок 27 вычисления степени риска может вычислять степень риска в конкретном местоположении, добавляя рамки 48 тщательного наблюдения, перекрывающие слепые зоны, вызванные препятствиями, к комбинациям рамок 42 обнаружения препятствия.
[0032] Как обсуждалось выше, множество рамок 42 обнаружения препятствия и множество рамок 48 тщательного наблюдения задаются для одного конкретного местоположения. Блок 27 вычисления степени риска определяет, может ли условие дорожного движения, заданное заранее, быть считано из комбинаций множества рамок 42 обнаружения препятствия, из которых обнаруживаются препятствия, и множества рамок 48 тщательного наблюдения, перекрывающих слепые зоны. Только если условие дорожного движения, заданное заранее, может быть считано, блок 27 вычисления степени риска вычисляет степень риска на основе условия дорожного движения. В случае, когда условие дорожного движения, заданное заранее, может быть считано, в то время как рассматриваемое транспортное средство движется, блок 27 вычисления степени риска распознает окружающую обстановку, с которой должно столкнуться рассматриваемое транспортное средство, как опасную обстановку.
[0033] В этом отношении, степень риска определяется с помощью комбинаций рамок 42 обнаружения препятствия, включающих в себя препятствия, и рамок 48 тщательного наблюдения, перекрывающих слепые зоны. Тем не менее, степень риска может быть определена посредством: вычисления степеней риска для соответствующих рамок 42 обнаружения препятствия и степеней риска для соответствующих рамок 48 тщательного наблюдения; и сложения этих степеней риска.
[0034] Фиг. 8(a) показывает трехпутное место соединения, для которого заданы 11 рамок (R01-R11) обнаружения препятствия и две рамки (T01, T02) тщательного наблюдения. В качестве запланированного маршрута 51 движения рассматриваемое транспортное средство 46 поворачивает налево на трехпутном месте соединения. Фиг. 8(b)-8(e) показывают примеры того, как сочетать рамки 42 обнаружения препятствия, включающие в себя препятствия, с рамками 48 тщательного наблюдения, перекрывающими слепые зоны для трехпутного места соединения, показанного на фиг. 8(a). Рамки 42 обнаружения препятствия, включающие в себя препятствия, и рамки 48 тщательного наблюдения перекрывающие слепые зоны, заштрихованы. В примере на фиг. 8(b) препятствия обнаруживаются в рамках (R04, R06) обнаружения препятствия, заданных для: въезда на перекресток с встречной полосы движения и его окрестностей; и выезда с перекрестка на встречную полосу движения и его окрестностей. Из комбинации рамок (R04, R06) обнаружения препятствия блок 27 вычисления степени риска может интерпретировать условие дорожного движения как дорожное движение, перегруженное на встречной полосе движения. В примере на фиг. 8(c) препятствия обнаруживаются в рамках (R02, R05, R07) обнаружения препятствия, заданных для внутренней части перекрестка, а также выезда с перекрестка для рассматриваемого транспортного средства и его окрестностей. Из комбинации рамок (R02, R05, R07) обнаружения препятствия блок 27 вычисления степени риска может интерпретировать условие дорожного движения как дорожное движение, перегруженное транспортными средствами, ожидающими на перекрестке поворота направо, поскольку другие транспортные средства стоят на полосе движения, на которую они едут, чтобы поворачивать направо.
[0035] В примере на фиг. 8(d) препятствие обнаруживается в рамке (R05) обнаружения препятствия, заданной для внутренней части перекрестка перед пешеходным переходом. Кроме того, рамка (T02) тщательного наблюдения на и рядом с пешеходным переходом на выезде с перекрестка для рассматриваемого транспортного средства перекрывает слепую зону. Из комбинации рамки (R05) обнаружения препятствия и рамки (T02) тщательного наблюдения блок 27 вычисления степени риска может интерпретировать условие дорожного движения как другое транспортное средство, останавливающееся впереди у пешеходного перехода, поскольку пешеходы 53 находятся на пешеходном переходе, или пешеходный переход является невидимым, поскольку существует препятствие перед пешеходным переходом.
[0036] В примере на фиг. 8(e) препятствие обнаруживается в рамке (R05) обнаружения препятствия, заданной для внутренней части перекрестка на встречной полосе движения. Кроме того, рамка (T01) тщательного наблюдения, заданная для въезда на перекресток с встречной полосы движения, перекрывает слепую зону. Из комбинации рамки (R05) обнаружения препятствия и рамки (T01) тщательного наблюдения блок 27 вычисления степени риска может интерпретировать условие дорожного движения как боковую дорогу на стороне въезда на перекресток с встречной полосы движения, являющейся невидимой, поскольку другое транспортное средство существует во внутренней части перекрестка на встречной полосе движения. Таким образом, блок 27 вычисления степени риска может определять риск того, что велосипед 52 может существовать на боковой дороге на стороне въезда на перекресток с встречной полосы движения.
[0037] Как показано на фиг. 1, устройство интерпретации обстановки первого варианта осуществления включает в себя базу данных 16 степеней риска. Комбинации рамок 42 обнаружения препятствия, включающих в себя препятствия, кодируются. База данных 16 степеней риска хранит соотношения между закодированными комбинациями и степенями риска. Блок 21 интерпретации обстановки включает в себя кодирующий процессор 29, который кодирует комбинации рамок обнаружения препятствия, включающих в себя препятствия. С помощью базы данных 16 степени риска блок 27 вычисления степени риска вычисляет степень риска в конкретном местоположении из комбинаций, закодированных посредством кодирующего процессора 29. Кодирование позволяет не допускать большого увеличения арифметической нагрузки. Впрочем, само собой разумеется, что рамки 48 тщательного наблюдения, перекрывающие слепые зоны, могут быть добавлены к закодированным комбинациям.
[0038] Кодирование является способом представления информации о степенях риска, который основывается на высокоскоростной обработке информации, которая должна выполняться посредством компьютера с помощью битовых строк. Результаты интерпретации обстановки с помощью множества рамок обнаружения препятствия и множества рамок тщательного наблюдения используются для кодирования. То, как ассоциировать комбинации со степенями риска, основывается на прошлых случаях аварий и прошлых случаях происшествий (близких к авариям случаях, которые естественным образом привели бы в результате к крупным авариям или несчастным случаям, хотя фактически не привели). База данных 16 степеней риска хранит прошлые случаи аварий как оцифрованные с помощью технологии кодирования.
[0039] Например, каждая комбинация рамок 42 обнаружения препятствия, включающих в себя препятствия с рамками 48 тщательного наблюдения, перекрывающими слепую зону, представляются последовательностью цифр. Комбинации, показанные на фиг. 8(b)-8(e), закодированы и ассоциированы с соответствующими степенями риска и сохранены в базе данных 16 степеней риска. Результатом кодирования комбинации, показанной на фиг. 8(b), является "0001010000000". Результатом кодирования комбинации, показанной на фиг. 8(c), является "010010001000". Результатом кодирования комбинации, показанной на фиг. 8(d), является "0000100100001". Результатом кодирования комбинации, показанной на фиг. 8(e), является "0000100100010".
[0040] Блок 27 вычисления степени риска сравнивает комбинации рамок обнаружения препятствия с рамками тщательного наблюдения, которые закодированы посредством кодирующего процессора 29, с закодированными комбинациями, сохраненными в базе данных 16 степеней риска, и, таким образом, вычисляет степень риска, которая соответствует комбинациям рамок обнаружения препятствия и рамок тщательного наблюдения.
[0041] Кроме того, для того, чтобы расширять рамки того, что может быть представлено цифрами в кодировании, не только то, существуют ли препятствия и слепые зоны, но также информация об атрибутах самих препятствий может быть представлена цифрами. Блок 26 определения препятствия может быть сконфигурирован, чтобы обнаруживать атрибуты препятствий, существующих в рамках 42 обнаружения препятствия, заданных для конкретного местоположения на запланированном маршруте 51 движения. Кодирующий процессор 29 кодирует комбинации рамок 42 обнаружения препятствия, включающие в себя препятствия, и атрибутов препятствий. Поскольку информация об атрибутах по препятствиям принимается во внимание, точность вычисления степеней риска улучшается. Само собой разумеется, что рамки 48 тщательного наблюдения, перекрывающие слепые зоны, могут быть добавлены к этим комбинациям.
[0042] В качестве способа представления атрибута каждого препятствия с помощью цифр битовые строки, представляющие комбинации, могут быть увеличены в числах посредством кодирования их атрибутов с помощью представления в виде двоичных разрядов, использующего 0 и 1. Информация об атрибутах включает в себя физическую информацию и характеристическую информацию. Примеры физической информации включают в себя: информацию о спецификациях транспортных средств, включающих в себя массы и размеры транспортных средств; и информацию о типах препятствий (пешеход, велосипед и квадроцикл). Примеры характеристической информации включают в себя: информацию о том, является ли каждое препятствие неподвижным или находится в движении; и информацию о движении, такую как о том, как каждое препятствие, если находится в движении, движется.
[0043] Первый вариант осуществления показал случай, когда, как показано на фиг. 4-7, степень риска вычисляется с помощью всех рамок 42 обнаружения препятствия и рамок 48 тщательного наблюдения, заданных заранее для каждого конкретного местоположения. Однако, вариант осуществления не ограничен этим. Например, вариант осуществления может быть таким, что: рамки 42' обнаружения препятствия выбираются из рамок 42 обнаружения препятствия, заданных заранее для конкретного местоположения; и определяется, существует ли препятствие в выбранных рамках 42' обнаружения препятствия.
[0044] Как показано на фиг. 2, блок 21 интерпретации обстановки дополнительно включает в себя блок 25 выбора рамки обнаружения, который выбирает рамки 42' обнаружения препятствия, которые должны быть определены в зависимости от запланированного маршрута 51 движения, из рамок 42 обнаружения препятствия, заданных заранее для каждого конкретного местоположения. Блок 26 определения препятствия определяет, существует ли препятствие в рамках 42' обнаружения препятствия, выбранных посредством блока 25 выбора рамок обнаружения. Это делает возможным не допускать увеличение арифметической нагрузки на блок 26 определения препятствия.
[0045] Кроме того, блок 25 выбора рамки обнаружения может выбирать рамки 48' тщательного наблюдения, которые должны быть определены в зависимости от запланированного маршрута 51 движения, из рамок 48 тщательного наблюдения, заданных заранее для каждого конкретного местоположения. В этом случае блок 28 определения перекрывания слепой зоны может определять, перекрывает ли слепая зона, вызванная препятствием, рамки 48' тщательного наблюдения, выбранные посредством блока 25 выбора рамки обнаружения. Это делает возможным не допускать увеличение арифметической нагрузки на блок 28 определения перекрывания слепой зоны.
[0046] Фиг. 9(a)-9(d) показывают примеры рамки 42' обнаружения препятствия, которая должна быть выбрана посредством блока 25 выбора рамки обнаружения. Фиг. 9(a) показывает примеры рамки 42' обнаружения препятствия, выбранной для трехпутного места соединения со светофорами. Фиг. 9(b) показывает примеры рамки 42' обнаружения препятствия, выбранной для трехпутного места соединения без светофоров. Фиг. 9(c) показывает примеры рамки 42' обнаружения препятствия, выбранной для точки слияния. Фиг. 9(d) показывает примеры рамки 42' обнаружения препятствия, выбранной для пешеходного перехода. Фиг. 9(e) и 9(f) показывают примеры рамки 48' тщательного наблюдения, которая должна быть выбрана посредством блока 25 выбора рамки обнаружения. Фиг. 9(e) показывает примеры рамки 48' тщательного наблюдения, выбранного для четырехпутного места соединения со светофорами. Фиг. 9(f) показывает примеры рамки 48' тщательного наблюдения, выбранного для четырехпутного места соединения без светофоров.
[0047] Способ выбора будет описан с помощью трехпутного места соединения в качестве примера. Прежде всего, выбирается рамка 42' обнаружения препятствия на запланированном маршруте 51 движения рассматриваемого транспортного средства 46. Выбирается рамка 42' обнаружения препятствия на встречной полосе движения, пересекающей запланированный маршрут 51 движения рассматриваемого транспортного средства 46. Кроме того, выбираются рамки 48' тщательного наблюдения в соприкосновении с выбранными рамками 42' обнаружения препятствия. Таким образом, могут быть выбраны рамки 42' обнаружения препятствия и рамки 48' тщательного наблюдения, относящиеся к движению рассматриваемого транспортного средства 46. Вышеописанный способ выбора также применим к другим конкретным местоположениям, таким как точка слияния и пешеходный переход.
[0048] Обращаясь к фиг. 3, будут предоставлены описания для примеров способа интерпретации обстановки и способа помощи вождению, использующих устройство 1a помощи вождению, включающее в себя устройство интерпретации обстановки первого варианта осуществления.
[0049] На этапе S01 блок 23 получения карты получает картографические данные, где одна, две или более рамок 42 обнаружения препятствия для обнаружения препятствия задаются заранее для конкретных местоположений. Впрочем, что касается момента считывания рамок 42 обнаружения препятствия, конфигурация может быть такой, что каждый раз, когда транспортное средство приближается к конкретному местоположению, блок 23 получения карты считывает рамки 42 обнаружения препятствия, заданные для конкретного местоположения, к которому транспортное средство приближается. Переходя к этапу S03, блок 24 вычисления маршрута вычисляет запланированный маршрут 51 движения рассматриваемого транспортного средства 46 на основе информации о позиции и пункте назначения рассматриваемого транспортного средства 46. На этапе S05 блок 26 определения препятствия получает информацию о препятствиях вокруг транспортного средства, которые обнаруживаются посредством установленной в транспортном средстве камеры 13 и лазерного датчика 14. На этапе S07 блок 26 определения препятствия получает информацию об атрибутах препятствий, которые обнаруживаются посредством установленной в транспортном средстве камеры 13 и лазерного датчика 14.
[0050] Переходя к этапу S11, блок 28 определения перекрывания слепой зоны вычисляет диапазоны слепых зон, вызванных препятствиями, которые обнаруживаются посредством установленной в транспортном средстве камеры 13 и лазерного датчика 14. Переходя к этапу S13, блок 21 интерпретации обстановки определяет, является ли ближайшее конкретное местоположение на запланированном маршруте 51 движения перекрестком, где встречаются три или более дорог. Описания будут предоставлены для процедуры относительно того, как определять конкретное местоположение как перекресток. Аналогичная процедура применима к другим конкретным местоположениям.
[0051] Переходя к этапу S15, блок 25 выбора рамки обнаружения выбирает рамки 42' обнаружения препятствия и рамки 48' тщательного наблюдения, которые должны быть определены в зависимости от запланированного маршрута 51 движения, из рамок 42 обнаружения препятствия и рамок 48 тщательного наблюдения, заданных заранее для перекрестка. Переходя к этапу S17, блок 28 определения перекрывания слепой зоны определяет, перекрывают ли слепые зоны, вызванные препятствиями, рамки 48' тщательного наблюдения. Переходя к этапу S19, кодирующий процессор 29 кодирует комбинации рамок 42 обнаружения препятствия, включающие в себя препятствия. После этого, блок 27 вычисления степени риска считывает данные о соотношениях между закодированными комбинациями и степенями риска из базы данных 16 степеней риска.
[0052] Переходя к этапу S21, блок 27 вычисления степени риска сравнивает комбинации, закодированные кодирующим процессором 29, с данными о соотношениях между закодированными комбинациями и степенями риска, и, таким образом, вычисляет степень риска для конкретного местоположения. На этапе S23 блок 27 вычисления степени риска определяет способ помощи вождению в зависимости от вычисленной степени риска и выводит определенный способ помощи вождению в блок 22 помощи вождению. Переходя к этапу S25, блок 22 помощи вождению выполняет помощь вождению в соответствии с определенным способом помощи.
[0053] Как обсуждалось выше, следующее действие и результаты могут быть получены из первого варианта осуществления настоящего изобретения.
[0054] Устройство интерпретации обстановки вычисляет степень риска в каждом конкретном местоположении на основе того, существует ли препятствие в рамках 42 обнаружения препятствия, которые задаются в картографических данных заранее и которые имеют форму, соответствующую структуре дороги. Таким образом, препятствия, которые обнаруживаются в позициях, в которых ничего не делается с вычислением степени риска, могут быть исключены из того, что устройство интерпретации обстановки должно обрабатывать. Это препятствует чрезмерному увеличению арифметической нагрузки.
[0055] Как показано на фиг. 6, блок 27 вычисления степени риска вычисляет степень риска в каждом конкретном местоположении на основе того, перекрывают ли рамки 48 тщательного наблюдения, которые должны тщательно наблюдаться рассматриваемым транспортным средством 46, слепые зоны 50, вызванные препятствиями 49. Это делает возможным вычисление степени риска в конкретном местоположении при предположении, что существуют препятствия в слепых зонах 50.
[0056] Блок 27 вычисления степени риска вычисляет степень риска в каждом конкретном местоположении на основе комбинаций рамок обнаружения препятствия, включающих в себя препятствия. Таким образом, блок 27 вычисления степени риска не должен вычислять степень риска для каждой рамки 42 обнаружения препятствия. Это позволяет не допускать избыточного увеличения арифметической нагрузки.
[0057] С помощью базы данных 16 степеней риска блок 27 вычисления степени риска вычисляет степень риска в каждом конкретном местоположении из закодированных комбинаций рамок обнаружения препятствия. Кодирование позволяет не допускать большого увеличения арифметической нагрузки.
[0058] Блок 26 определения препятствия обнаруживает атрибуты препятствий в рамках 42 обнаружения препятствия в каждом конкретном местоположении на запланированном маршруте 51 движения, и кодирующий процессор 29 кодирует комбинации рамок обнаружения препятствия, включающих в себя препятствия, и атрибутов препятствий. Поскольку атрибуты (физическая информация и характеристическая информация) препятствий принимаются во внимание, точность вычисления степени риска улучшается.
[0059] Как показано на фиг. 9, блок 25 выбора рамки обнаружения выбирает рамки 42' обнаружения препятствия, которые должны быть определены в зависимости от запланированного маршрута 51 движения, из рамок 42 обнаружения препятствия, заданных заранее для каждого конкретного местоположения. Блок 26 определения препятствия определяет, существует ли препятствие в рамках 42' обнаружения препятствия, выбранных посредством блока 25 выбора рамки обнаружения. Поскольку блок 26 определения препятствия выполняет определение только по рамкам 42' обнаружения препятствия, выбранным посредством блока 25 выбора рамки обнаружения, представляется возможным препятствовать увеличению арифметической нагрузки.
[0060] В случае, когда конкретное местоположение является перекрестком, где встречаются три или более дорог, рамка 42 обнаружения препятствия задается для въезда, и выезда, с перекрестка, внутренней части перекрестка и пешеходных переходов. Это позволяет препятствовать увеличению арифметической нагрузки, когда степень риска вычисляется для перекрестка, где встречаются три или более дорог.
(Второй вариант осуществления)
[0061] Обращаясь к фиг. 10 и 11, описания будут предоставлены для конфигурации устройства 1b помощи вождению, включающего в себя устройство интерпретации обстановки первого варианта осуществления. Устройство 1b помощи вождению отличается от устройства помощи вождению, показанного на фиг. 1, в том, что устройство 1b помощи вождению включает в себя базу данных 17 знаний вместо базы данных 16 степеней риска. База данных 17 знаний хранит данные (дерево знаний) о: рамках 42 обнаружения препятствия, которые должны быть определены в зависимости от позиции рассматриваемого транспортного средства в каждом конкретном местоположении; и порядке рамок 42 обнаружения препятствия, относительно которых необходимо быть осторожным. Примеры позиции рассматриваемого транспортного средства в конкретном местоположении включают в себя въезд, внутреннюю часть и выезд из конкретного местоположения. Рамки 42 обнаружения препятствия и порядок рамок 42 обнаружения препятствия, относительно которых необходимо быть осторожным, задаются для каждого из въезда, внутренней части и выезда из конкретного местоположения. Само собой разумеется, что рамки 48 тщательного наблюдения и порядок рамок 48 тщательного наблюдения, относительно которых необходимо быть осторожным, могут быть заданы в зависимости от позиции рассматриваемого транспортного средства.
[0062] Обращаясь к фиг. 11, будут предоставлены описания для множества арифметических процессоров, сконфигурированных посредством арифметической схемы 17b. Арифметическая схема 17b отличается от арифметической схемы 17a, показанной на фиг. 2, в том, что арифметическая схема 17b включает в себя блок 31 получения дерева знаний вместо кодирующего процессора 29 и блока 30 получения данных о степени риска. Остальная конфигурация арифметической схемы 17b является такой же, что и конфигурация арифметической схемы 17a. Блок 31 получения дерева знаний получает данные (дерево знаний) о рамках 42 обнаружения препятствия и порядок рамок 42 обнаружения препятствия, относительно которых необходимо проявлять осторожность, которые ассоциируются с позицией рассматриваемого транспортного средства, обнаруженной посредством GPS 11, из базы данных 17 знаний. На основе рамок 42 обнаружения препятствия и порядка рамок 42 обнаружения препятствия, относительно которых необходимо проявлять осторожность, которые получены из базы данных 17 знаний, блок 26 определения препятствия последовательно определяет, существует ли препятствие в рамках 42 обнаружения препятствия. Таким образом, в зависимости от позиции рассматриваемого транспортного средства в конкретном местоположении, соответствующая степень риска и соответствующий способ помощи вождению могут быть вычислены.
[0063] С помощью перекрестка в качестве примера описания будут предоставлены для способа вычисления степени риска (способа помощи вождению), использующего дерево знаний. Области (рамки 42 обнаружения препятствия и рамки 48 тщательного наблюдения), относительно которых необходимо проявлять осторожность на каждом перекрестке, и порядок проявления внимательности, привязанный к множеству областей, задаются в дереве знаний. Дерево знаний включает в себя, например, "информацию о въезде на перекресток", "информацию о выезде с перекрестка", "информацию о внутренней части перекрестка" и "информацию о слепой зоне".
[0064] Выражаясь конкретно, "информация о въезде на перекресток" является информацией о том, существует ли другое транспортное средство на или рядом с въездом на перекресток. "Информация о выезде с перекрестка" является информацией о том, существует ли другое транспортное средство на или рядом с выездом с перекрестка. "Информация о внутренней части перекрестка" является информацией о том, существует ли другое транспортное средство внутри перекрестка. "Информация о слепой зоне" является информацией о том, скрывает ли слепая зона, вызванная другим транспортным средством внутри перекрестка, рамку 48 тщательного наблюдения.
[0065] Эти наборы информации получаются в предварительно определенном порядке, чтобы определять тип поведения транспортного средства, т.е., способ помощи вождению. Типы поведения включают в себя "остановку у стоп-линии" на въезде на перекресток, "остановку в области ожидания правого поворота", "остановку перед пешеходным переходом", "движение с низкой скоростью в месте с более хорошей видимостью и ускорение или остановку" и "проезд через перекресток в пределах ограничения скорости транспортного средства". Использование дерева знаний делает возможным определение одного из способов помощи управлению скоростью.
[0066] Дерево знаний отличается в зависимости от позиции рассматриваемого транспортного средства в каждом конкретном местоположении. Отличающиеся деревья знаний подготавливаются соответственно для случая, когда рассматриваемое транспортное средство находится перед въездом на перекресток, случая, когда рассматриваемое транспортное средство находится между въездом на перекресток и областью ожидания правого поворота, и случая, когда рассматриваемое транспортное средство находится между областью ожидания правого поворота и пешеходным переходом. Эти деревья знаний хранятся в базе данных 17 знаний.
[0067] С помощью фиг. 12 будут предоставлены описания для способа интерпретации обстановки и способа помощи вождению, использующих устройство 1b помощи вождению, включающих в себя устройство интерпретации обстановки второго варианта осуществления. Этапы на фиг. 12, которые являются такими же, что и этапы на фиг. 3, будут обозначены такими же ссылочными знаками. Описания для таких этапов будут пропущены.
[0068] Блок-схема последовательности операций на фиг. 12 отличается от блок-схемы последовательности операций на фиг. 3 в том, что блок-схема последовательности операций на фиг. 12 включает в себя этап S31 (получение дерева знаний) и этап S33 (вычисление степени риска) вместо этапа S19 (кодирование и получение данных о степени риска) и этапа S21 (вычисление степени риска). Другие этапы в блок-схеме последовательности операций на фиг. 12 являются такими же, что и этапы в блок-схеме последовательности операций на фиг. 3.
[0069] На этапе S31 блок 31 получения дерева знаний получает данные (дерево знаний) о рамках 42 обнаружения препятствия, рамках 48 тщательного наблюдения, а также о порядке рамок 42 обнаружения препятствия и рамок 48 тщательного наблюдения, относительно которых необходимо проявлять осторожность, которые ассоциируются с позицией рассматриваемого транспортного средства, обнаруженной посредством GPS 11, из базы данных 17 знаний.
[0070] Переходя к этапу S33, блок 26 определения препятствия определяет, существует ли препятствие в рамках 42 обнаружения препятствия, последовательно на основе дерева знаний, полученного из базы данных 17 знаний. Блок 27 вычисления степени риска вычисляет степень риска в конкретном местоположении в зависимости от того, существует ли препятствие. Переходя к этапу S23, блок 27 вычисления степени риска определяет способ помощи вождению, соответствующий вычисленной степени риска, и выводит определенный способ помощи вождению в блок 22 помощи вождению.
[0071] Обращаясь к фиг. 13, подробные описания будут предоставлены для этапов S33 и S23. На этапе S41 блок 26 определения препятствия определяет, находится ли позиция рассматриваемого транспортного средства, обнаруженная посредством GPS 11, перед въездом на перекресток. Если его позиция находится перед въездом на перекресток (Да на этапе S41), процесс переходит к этапу S47, где дерево знаний (въезд на перекресток), ассоциированное с въездом на перекресток, выполняется, чтобы вычислять степень риска, и, таким образом, определять способ помощи вождению. Подробности дерева знаний (въезд на перекресток) будут описаны позже посредством ссылки на фиг. 14.
[0072] Если позиция рассматриваемого транспортного средства не находится перед въездом на перекресток (Нет на этапе S41), процесс переходит к этапу S43, где определяется, находится ли позиция рассматриваемого транспортного средства между въездом на перекресток и областью ожидания правого поворота. Если определение является утвердительным (Да на этапе S43), процесс переходит к этапу S49, где дерево знаний (внутренняя часть перекрестка), ассоциированное с внутренней частью перекрестка, осуществляется, чтобы вычислять степень риска и, таким образом, определять способ помощи вождению. Подробности дерева знаний (внутренняя часть перекрестка) будут описаны позже посредством ссылки на фиг. 15.
[0073] Если определение является отрицательным (Нет на этапе S43), процесс переходит к этапу S45, где определяется, находится ли позиция рассматриваемого транспортного средства между областью ожидания правого поворота и областью перед пешеходным переходом. Если определение является утвердительным (Да на этапе S45), процесс переходит к этапу S51, где дерево знаний (выезд с перекрестка), ассоциированное с выездом с перекрестка, осуществляется, чтобы вычислять степень риска и, таким образом, определять способ помощи вождению. Подробности дерева знаний (выезд с перекрестка) будут описаны позже посредством ссылки на фиг. 16.
[0074] Обращаясь к фиг. 14, будут предоставлены описания для подробной процедуры для дерева знаний (въезд на перекресток), показанного для этапа S47 на фиг. 13. Определяется, существует ли другое транспортное средство в или рядом с въездом на перекресток, на основе вышеупомянутой "информации D01 о въезде на перекресток". Если там присутствует другое транспортное средство, остановка у стоп-линии определяется в качестве поведения рассматриваемого транспортного средства (S71). Если другое транспортное средство не присутствует там, определяется, присутствует ли другое транспортное средство на или рядом с выездом с перекрестка, на основе "информации D03 о выезде с перекрестка". Если там присутствует другое транспортное средство, остановка у стоп-линии определяется в качестве поведения рассматриваемого транспортного средства (S73). Если другое транспортное средство не присутствует там, определяется, присутствует ли другое транспортное средство, останавливающееся внутри перекрестка, на основе "информации D05 о транспортном средстве, останавливающемся внутри перекрестка". Если другое транспортное средство не присутствует там, перемещение в область ожидания правого поворота определяется в качестве поведения рассматриваемого транспортного средства (S75).
[0075] Если другое транспортное средство присутствует там, определяется, находится ли оно в области ожидания правого поворота, или в или рядом с въездом на встречную полосу движения, на основе "информации D07 о позиции останавливающегося транспортного средства". Если другое транспортное средство находится в области ожидания правого поворота, и если слепая зона формируется на въезде на встречную полосу движения посредством транспортного средства, перемещение в область ожидания правого поворота определяется в качестве поведения рассматриваемого транспортного средства (S81). Если другое транспортное средство находится в области ожидания правого поворота, и если слепая зона формируется позади транспортного средства, остановка после перемещения с низкой скоростью определяется в качестве поведения рассматриваемого транспортного средства (S79). Если другое транспортное средство находится в или рядом с въездом на встречную полосу движения, и если слепая зона формируется позади транспортного средства, остановка после перемещения с низкой скоростью определяется в качестве поведения рассматриваемого транспортного средства (S79). Если другое транспортное средство находится в или рядом с въездом на встречную полосу движения, если слепая зона формируется на боковой дороге на въезде на встречную полосу движения, перемещение в область ожидания правого поворота определяется в качестве поведения рассматриваемого транспортного средства (S77).
[0076] Обращаясь к фиг. 15, будут предоставлены описания для подробной процедуры для дерева знаний (внутренняя часть перекрестка), показанного для этапа S49 на фиг. 12. Определяется, присутствует ли другое транспортное средство в или рядом с выездом с перекрестка, на основе вышеупомянутой "информации D03 о выезде с перекрестка". Если другое транспортное средство присутствует там, остановка в области ожидания правого поворота определяется в качестве поведения рассматриваемого транспортного средства (S83). Если другое транспортное средство не присутствует там, определяется, существует ли другое транспортное средство на или рядом с въездом на противоположную полосу движения, на основе "информации S27 о въезде на встречную полосу движения". Если другое транспортное средство присутствует там, определяется, является ли область позади транспортного средства видимой, на основе "информации D13 о слепой зоне". Если область позади транспортного средства является видимой, выполнение управления для ухода от столкновения определяется в качестве поведения рассматриваемого транспортного средства (S87). Если область позади транспортного средства является невидимой, остановка в области ожидания правого поворота определяется в качестве поведения рассматриваемого транспортного средства (S85).
[0077] Если другое транспортное средство не присутствует на или рядом с въездом на встречную полосу движения, определяется, присутствует ли мотоцикл, который собирается поворачивать направо с внутренней стороны сзади рассматриваемого транспортного средства, на основе "информации D15 о затруднительном положении". Если мотоцикл не присутствует там, перемещение в область перед пешеходным переходом определяется в качестве поведения рассматриваемого транспортного средства (S89). Если мотоцикл присутствует там, определяется, видна ли передняя часть мотоцикла, на основе "информации D17 о слепой зоне". Если передняя часть мотоцикла является видимой, перемещение в область перед пешеходным переходом после разрешения мотоциклу обгонять рассматриваемое транспортное средство определяется в качестве поведения рассматриваемого транспортного средства (S93). Если передняя часть мотоцикла не видна, остановка в области ожидания правого поворота определяется в качестве поведения рассматриваемого транспортного средства (S91).
[0078] Обращаясь к фиг. 16, будут предоставлены описания для подробной процедуры для дерева знаний (выезд с перекрестка), показанного для этапа S51 на фиг. 12. Определяется, присутствует ли другое транспортное средство на встречной полосе движения, которое собирается поворачивать налево на перекрестке, или присутствует ли мотоцикл (другое транспортное средство), которое собирается поворачивать направо на перекрестке с внутренней стороны сзади рассматриваемого транспортного средства, на основе "информации D19 о левом повороте с встречной полосы движения" или "информации D21 о затруднительном положении на перекрестке". Если другое транспортное средство присутствует там, перемещение с низкой скоростью, в то же время позволяя транспортному средству ехать перед рассматриваемым транспортным средством, определяется в качестве поведения рассматриваемого транспортного средства (S95). Если другое транспортное средство не присутствует там, определяется, присутствует ли пешеход на пешеходном перекрестке, на основе "информации D23 о пешеходном переходе". Если пешеход присутствует там, остановка перед пешеходным переходом определяется в качестве поведения рассматриваемого транспортного средства (S97). Если пешеход не присутствует там, определяется, присутствует ли пешеход рядом с пешеходным переходом, на основе "информации D25 о выходе/входе для пешеходного перехода". Если пешеход присутствует там, остановка на одну секунду дольше и проезд через пешеходный переход, если пешеход не движется, определяется в качестве поведения рассматриваемого транспортного средства (S101). Если пешеход не присутствует там, проезд через пешеходный переход определяется в качестве поведения рассматриваемого транспортного средства (S99).
[0079] Как обсуждалось выше, следующее действие и результаты могут быть получены из второго варианта осуществления настоящего изобретения.
[0080] Обращаясь к базе данных 17 знаний, блок 26 определения препятствия определяет, существует ли препятствие в рамках 42 обнаружения препятствия, с помощью деревьев знаний (фиг. 14-16), соответствующих позиции рассматриваемого транспортного средства. Это делает возможным вычисление соответствующей степени риска в зависимости от позиции рассматриваемого транспортного средства в каждом конкретном местоположении и, таким образом, определение соответствующего поведения транспортного средства.
[0081] Хотя варианты осуществления настоящего изобретения были описаны выше, описания или чертежи, составляющие часть этого описания, не должны пониматься как ограничивающие настоящее изобретение. Из описания изобретения различные альтернативные варианты осуществления, примеры и операционные техники будут очевидны специалистам в области техники.
Список ссылочных знаков
[0082] 1a, 1b устройство помощи вождению
2 рамка обнаружения препятствия
12 картографическая база данных
16 база данных степеней риска
17 база данных знаний
21 блок интерпретации обстановки (устройство интерпретации обстановки)
23 блок получения карты
24 блок вычисления маршрута (блок получения маршрута)
25 блок выбора рамки обнаружения
26 блок определения препятствия
27 блок вычисления степени риска
28 блок определения перекрывания слепой зоны
29 кодирующий процессор
30 блок получения данных о степени риска
31 блок получения дерева знаний
42, 42' рамка обнаружения препятствия
48, 48' рамка тщательного наблюдения
49 препятствие
50 слепая зона
46 рассматриваемое транспортное средство
51 запланированный маршрут движения
52 велосипед (препятствие)
53 пешеход (препятствие).
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство контроля помех
Устройство помощи при отображении и способ помощи при отображении
Способ и оборудование отображения окрестностей мобильного тела

