Результат интеллектуальной деятельности: УСТРОЙСТВО ОТОБРАЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОТОБРАЖЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству отображения транспортного средства, включающему в себя дисплей, к примеру, дисплей на лобовом стекле, смонтированный в транспортном средстве, и относится к способу отображения для транспортного средства.
Уровень техники
[0002] В последние годы транспортные средства, такие как автомобили, начинают использовать устройство отображения транспортного средства, включающее в себя так называемый дисплей на лобовом стекле, отображающий изображение вместе с объектом, просматриваемым водителем через ветровое стекло транспортного средства.
[0003] Например, предложено устройство отображения транспортного средства, которое отображает изображение маркера вместе с позицией движущегося впереди транспортного средства в течение определенного времени. Изображение маркера указывает то, что движущееся впереди транспортное средство захватывается для слежения посредством устройства для адаптивного автоматического регулирования скорости (адаптивный круиз-контроль), при котором скорость транспортного средства и расстояние между транспортными средствами автоматически регулируются с возможностью ехать за движущимся впереди транспортным средством (см. патентный документ 1).
Список библиографических ссылок
Патентные документы
[0004] Патентный документ 1. Публикация заявки на патент (Япония) номер 2005-067514
Сущность изобретения
[0005] Изображение маркера, указывающее то, что движущееся впереди транспортное средство захватывается для слежения, отображается в области отображения, предоставленной таким образом, что она перекрывает позицию ветрового стекла. Тем не менее, область отображения имеет меньшую ширину и высоту, чем область ветрового стекла, и ограничена.
[0006] Соответственно, например, когда движущееся впереди транспортное средство для следования за ним достигает искривленной дороги, движущееся впереди транспортное средство иногда перемещается к внешней стороне левого бокового края (в случае искривления влево) или правого бокового края (в случае искривления вправо) области отображения. Адаптивное автоматическое регулирование скорости продолжается в то время, когда транспортное средство движется через такое искривление.
[0007] Тем не менее, поскольку отображение изображения маркера исчезает в области отображения, для водителя затруднительно определять то, выполняется или нет адаптивное автоматическое регулирование скорости, в частности, управление скоростью транспортного средства и расстоянием между транспортными средствами для следования за движущимся впереди транспортным средством.
[0008] Настоящее изобретение осуществлено с учетом ситуации, описанной выше, и его задача заключается в том, чтобы предоставлять устройство отображения транспортного средства и способ отображения для транспортного средства, которые обеспечивают возможность водителю легко распознавать то, что управление следованием за движущимся впереди транспортным средством выполняется, когда позиция движущегося впереди транспортного средства перемещается за пределы стороны области отображения.
[0009] Устройство отображения транспортного средства согласно одному аспекту настоящего изобретения включает в себя дисплей, выполненный с возможностью отображать изображение в области отображения, предоставленной таким образом, что она перекрывает позицию ветрового стекла, включенного в транспортное средство. Устройство отображения транспортного средства включает в себя детектор движущихся впереди транспортных средств, выполненный с возможностью обнаруживать позицию движущегося впереди транспортного средства, за которым едет транспортное средство при движении; процессор отображения, выполненный с возможностью инструктировать дисплею отображать изображение маркера, соответствующее обнаруженной позиции движущегося впереди транспортного средства; и модуль определения, выполненный с возможностью определять то, расположено движущееся впереди транспортное средство на внутренней стороне боковых краев области отображения по ширине транспортного средства или на внешних сторонах боковых краев по ширине транспортного средства, на основе позиции движущегося впереди транспортного средства. Когда движущееся впереди транспортное средство расположено на внешней стороне одного из боковых краев области отображения по ширине транспортного средства, процессор отображения продолжает отображать изображение маркера в периферийном фрагменте бокового края по ширине транспортного средства, на внешней стороне которого расположено движущееся впереди транспортное средство.
Краткое описание чертежей
[0010] Фиг. 1 является схематичным видом транспортного средства V, в котором монтируется устройство 100 отображения транспортного средства согласно варианту осуществления.
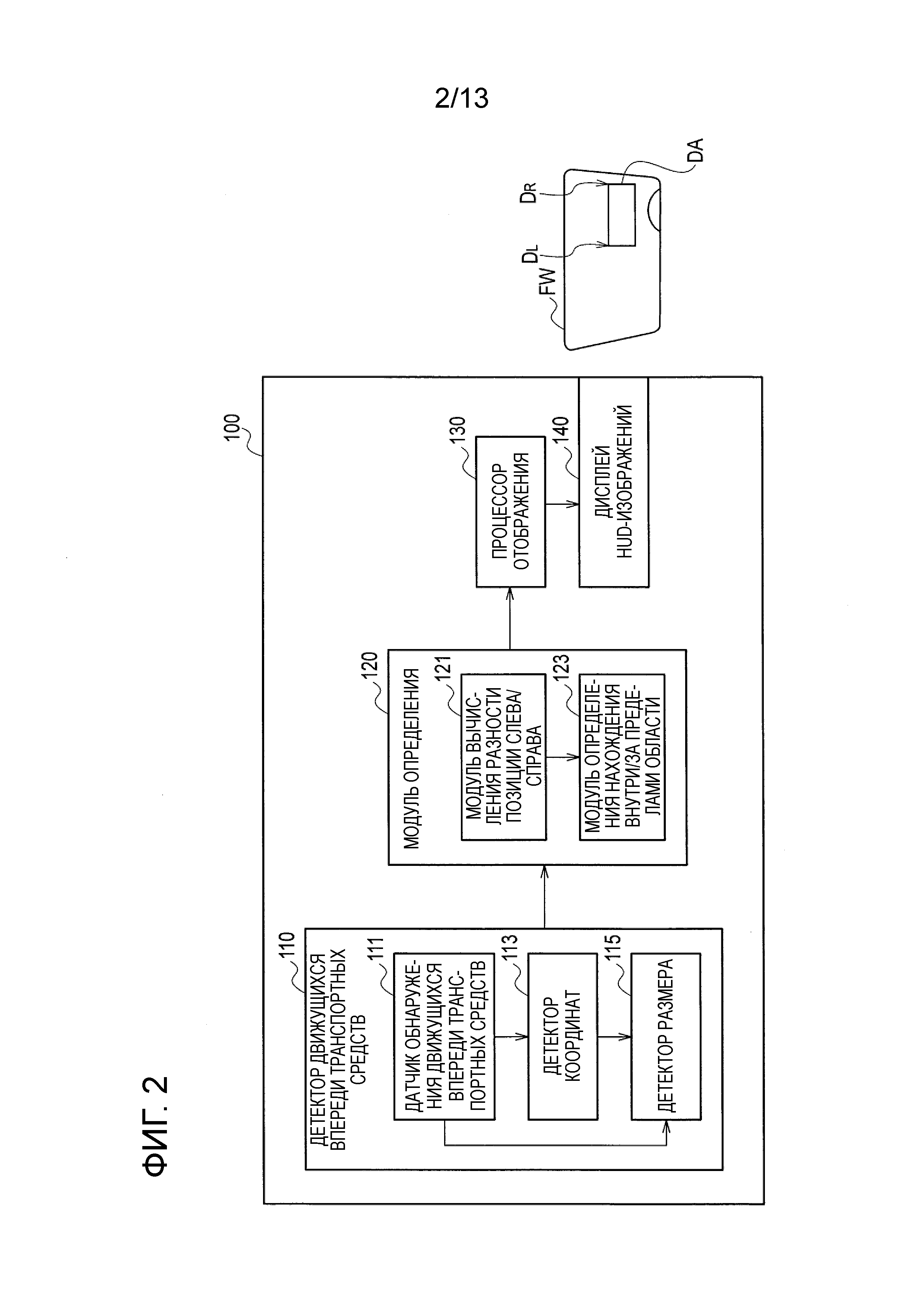
Фиг. 2 является схемой конфигурации функциональных блоков устройства 100 отображения транспортного средства.
Фиг. 3 является схемой, иллюстрирующей последовательность операций отображения изображений маркера устройства 100 отображения транспортного средства.
Фиг. 4A-4D являются видами, поясняющими пример 1 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
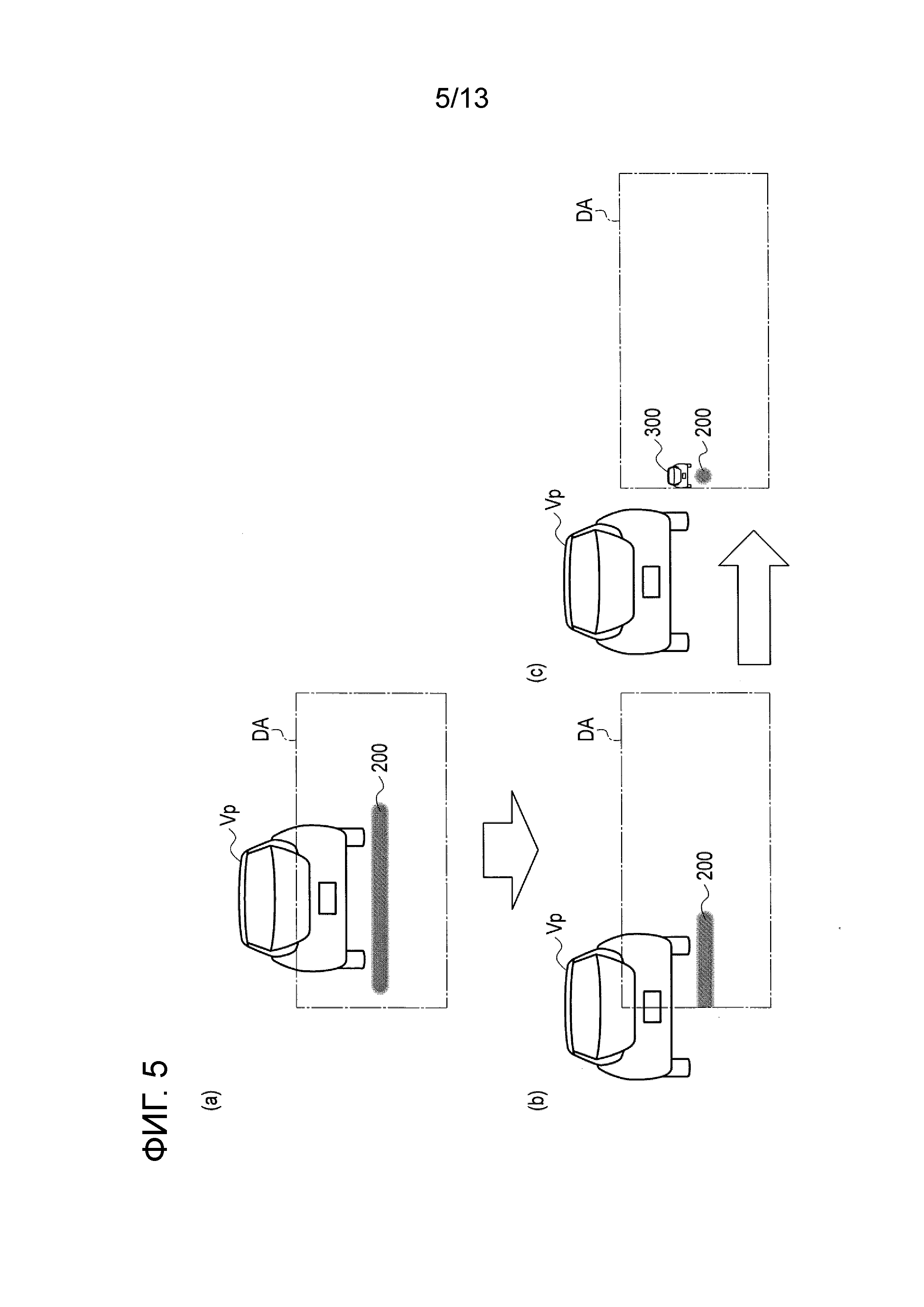
Фиг. 5A-5C являются видами, поясняющими пример 2 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
Фиг. 6A-6D являются видами, поясняющими пример 3 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
Фиг. 7A-7E являются видами, поясняющими пример 4 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
Фиг. 8A-8E являются видами, поясняющими пример 5 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
Фиг. 9A-9E являются видами, поясняющими пример 6 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
Фиг. 10A-10E являются видами, поясняющими пример 7 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
Фиг. 11A to11F являются видами, поясняющими пример 8 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
Фиг. 12A-12E являются видами, поясняющими пример 9 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
Фиг. 13A-13E являются видами, поясняющими пример 10 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
Подробное описание вариантов осуществления
[0011] Ниже описываются варианты осуществления на основе чертежей. Следует отметить, что идентичные функции и конфигурации обозначаются посредством идентичных или аналогичных ссылок с номерами, и их описание опускается надлежащим образом.
[0012] Схематичная конфигурация транспортного средства, в котором монтируется устройство отображения транспортного средства
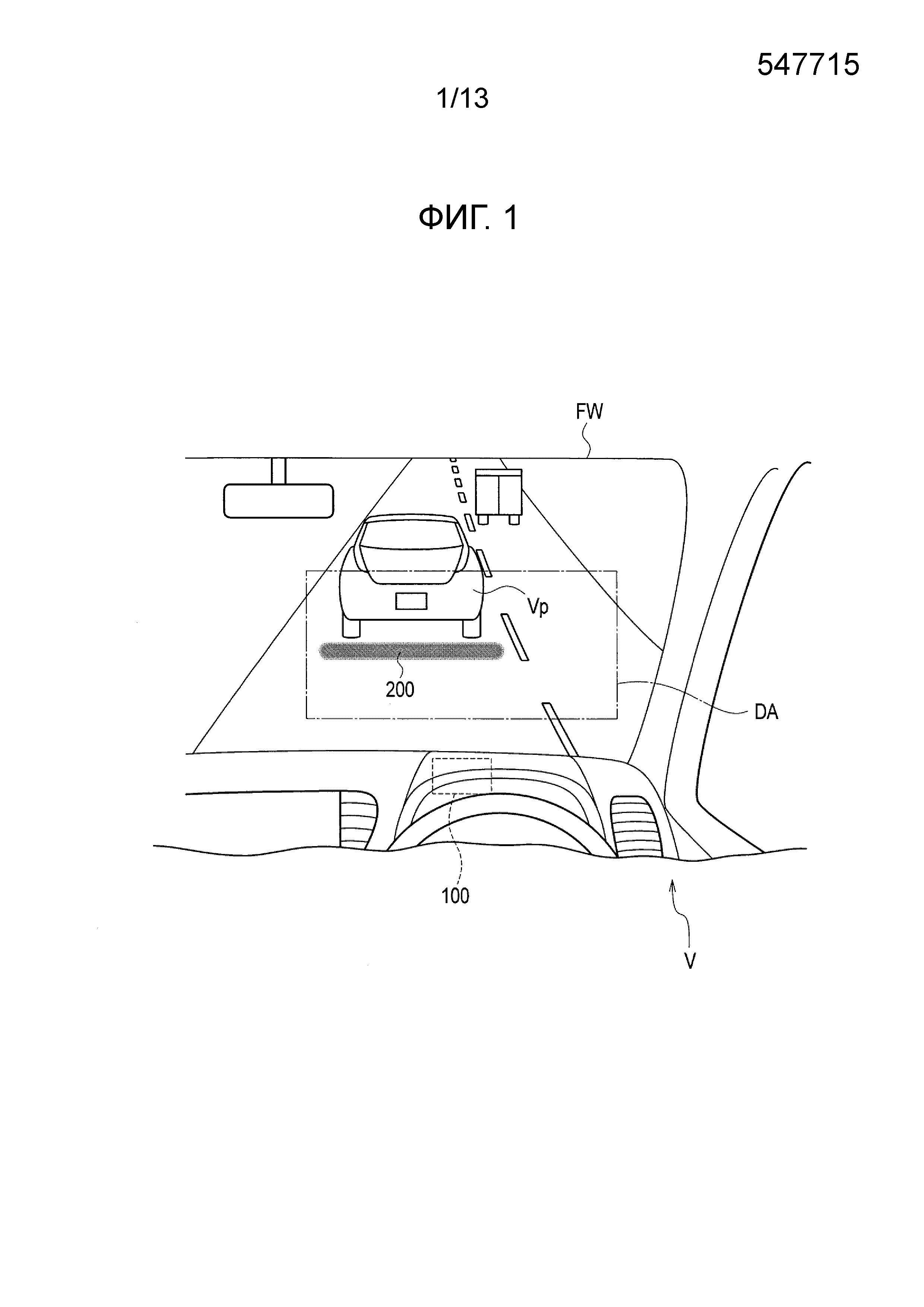
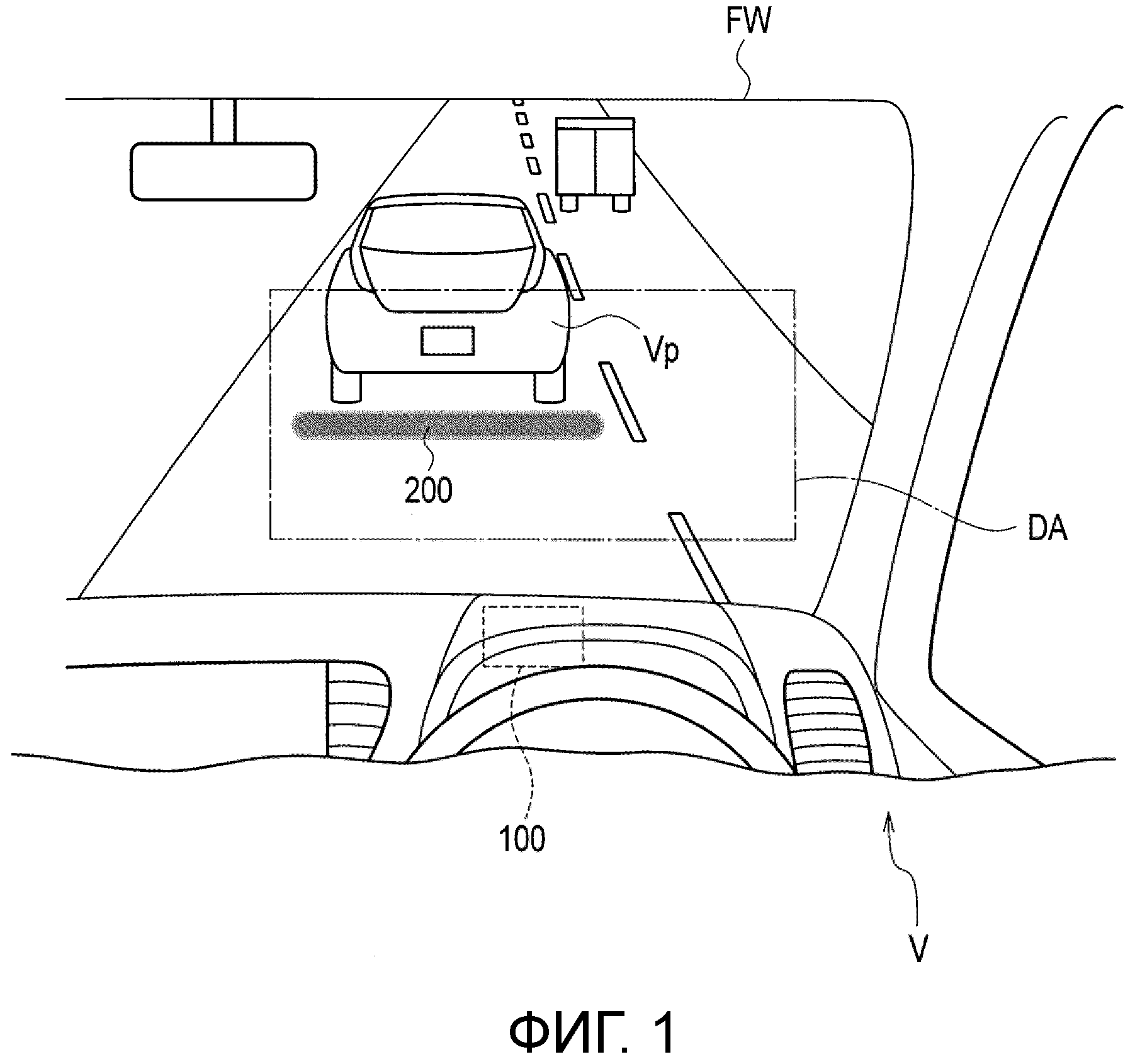
Фиг. 1 является схематичным видом транспортного средства V, в котором монтируется устройство 100 отображения транспортного средства согласно варианту осуществления. В частности, фиг. 1 иллюстрирует вид с водительского сиденья транспортного средства V.
[0013] Как проиллюстрировано на фиг. 1, устройство 100 отображения транспортного средства монтируется в транспортном средстве V. Устройство 100 отображения транспортного средства отображает изображение в области DA отображения, предоставленной таким образом, что она перекрывает позицию ветрового стекла FW, включенного в транспортное средство V.
[0014] В частности, устройство 100 отображения транспортного средства отображает изображение в области DA отображения вместе с объектом, просматриваемым водителем через ветровое стекло FW. Более конкретно, устройство 100 отображения транспортного средства отображает изображение 200 маркера в форме наложения на движущееся впереди транспортное средство Vp перед транспортным средством V, когда транспортное средство V едет за движущимся впереди транспортным средством Vp при движении.
[0015] Другими словами, устройство 100 отображения транспортного средства включает в себя дисплей на лобовом стекле (HUD). В частности, устройство 100 отображения транспортного средства функционирует в качестве дисплея на лобовом стекле в стиле дополненной реальности (AR-HUD), который может отображать виртуальный символ (изображение) вместе с объектом, просматриваемым водителем через ветровое стекло FW.
[0016] Область DA отображения предоставляется таким образом, что она перекрывает частичную область ветрового стекла FW при просмотре с точки обзора водителя, сидящего на водительском сиденье. Хотя конкретная позиция области DA отображения не ограничена конкретным образом, область DA отображения, в общем, предоставляется в частичной области ветрового стекла FW, которая включает в себя сторону водительского сиденья.
[0017] Кроме того, в варианте осуществления, поскольку устройство 100 отображения транспортного средства отображает изображение 200 маркера для движущегося впереди транспортного средства Vp, захваченного для слежения посредством устройства для адаптивного автоматического регулирования скорости в области DA отображения, предпочтительно, чтобы область DA отображения предоставлялась в нижнем фрагменте ветрового стекла FW.
[0018] Адаптивное автоматическое регулирование скорости представляет собой управление транспортным средством для автоматического регулирования скорости транспортного средства V и расстояния между транспортными средствами между транспортным средством V и движущимся впереди транспортным средством Vp, чтобы ехать за движущимся впереди транспортным средством Vp, и достигается посредством управления степенью открытия акселератора, позицией переключения передач и тормозом. Тем не менее, управление позицией переключения передач и тормозом не является обязательным.
[0019] Изображение 200 маркера представляет собой изображение в форме полоски, отображаемое ниже вида сзади движущегося впереди транспортного средства Vp и имеющее ширину, аналогичную всей ширине движущегося впереди транспортного средства Vp. В частности, когда расстояние между транспортным средством V и движущимся впереди транспортным средством Vp увеличивается, размер движущегося впереди транспортного средства Vp уменьшается, и в силу этого ширина изображения 200 маркера также уменьшается синхронно с этим уменьшением. С другой стороны, когда расстояние между транспортным средством V и движущимся впереди транспортным средством Vp уменьшается, размер движущегося впереди транспортного средства Vp увеличивается, и в силу этого ширина изображения 200 маркера также увеличивается синхронно с этим увеличением.
[0020] Тем не менее, как описано ниже, режим отображения изображения 200 маркера не ограничен режимом, проиллюстрированным на фиг. 1.
[0021] Следует отметить, что, хотя транспортное средство V, в котором монтируется устройство 100 отображения транспортного средства, типично представляет собой четырехколесное пассажирское транспортное средство (включающее в себя SUV и минифургон), транспортное средство V может представлять собой грузовик, автобус и т.п., как и следовало ожидать.
[0022] Конфигурация функциональных блоков устройства отображения транспортного средства
Фиг. 2 является схемой конфигурации функциональных блоков устройства 100 отображения транспортного средства. Как проиллюстрировано на фиг. 2, устройство 100 отображения транспортного средства включает в себя детектор 110 движущихся впереди транспортных средств, модуль 120 определения, процессор 130 отображения и дисплей 140 HUD-изображений. Следует отметить, что функциональные блоки сконфигурированы посредством информационных процессоров, таких как CPU, и устройств хранения данных, таких как запоминающее устройство и жесткий диск.
[0023] Детектор 110 движущихся впереди транспортных средств обнаруживает позицию движущегося впереди транспортного средства Vp, движущегося перед транспортным средством V. В частности, детектор 110 движущихся впереди транспортных средств сконфигурирован посредством датчика 111 обнаружения движущихся впереди транспортных средств, детектора 113 координат и детектора 115 размера.
[0024] Датчик 111 обнаружения движущихся впереди транспортных средств сконфигурирован посредством группы датчиков, которая обнаруживает движущееся впереди транспортное средство Vp. Камера, выполненная с возможностью захватывать переднее изображение в направлении движения транспортного средства V, включающее в себя движущееся впереди транспортное средство Vp, и радар, выполненный с возможностью измерять расстояние до движущегося впереди транспортного средства Vp, используются в качестве группы датчиков.
[0025] Следует отметить, что камера может представлять собой монокулярную камеру или стереокамеру и сконфигурирована посредством элемента формирования изображений с использованием CCD, CMOS и т.п. Радар может представлять собой радар миллиметрового диапазона или лазерный радар. Кроме того, датчик 111 обнаружения движущихся впереди транспортных средств может быть сконфигурирован только посредством камеры или радара.
[0026] Детектор 113 координат обнаруживает координатные данные движущегося впереди транспортного средства Vp в трехмерном пространстве, на основе изображения движущегося впереди транспортного средства Vp и расстояния до движущегося впереди транспортного средства Vp, которые обнаруживаются посредством датчика 111 обнаружения движущихся впереди транспортных средств.
[0027] Детектор 115 размера определяет размер движущегося впереди транспортного средства Vp, просматриваемого водителем в области DA отображения, на основе координатных данных движущегося впереди транспортного средства Vp, обнаруженных посредством детектора 113 координат.
[0028] Модуль 120 определения определяет то, расположено или нет движущееся впереди транспортное средство Vp в области DA отображения, на основе позиции движущегося впереди транспортного средства Vp, обнаруженного посредством детектора 110 движущихся впереди транспортных средств. В частности, модуль 120 определения сконфигурирован посредством модуля 121 вычисления разности позиции слева/справа и модуля 123 определения нахождения внутри/за пределами области.
[0029] Модуль 121 вычисления разности позиции слева/справа вычисляет разность позиции слева/справа между транспортным средством V (рассматриваемым транспортным средством) и движущимся впереди транспортным средством Vp. В частности, модуль 121 вычисления разности позиции слева/справа вычисляет разность позиции слева/справа между рассматриваемым транспортным средством и движущимся впереди транспортным средством Vp в области DA отображения, на основе координатных данных и размера движущегося впереди транспортного средства Vp, предоставленных посредством детектора 110 движущихся впереди транспортных средств.
[0030] Модуль 123 определения нахождения внутри/за пределами области определяет то, движущееся впереди транспортное средство Vp расположено между левым боковым краем DL и правым боковым краем DR области DA отображения, которая расположена на внутренней стороне боковых краев области DA отображения по ширине транспортного средства, или расположено на внешних сторонах боковых краев по ширине транспортного средства, на основе результата вычисления посредством модуля 121 вычисления разности позиции слева/справа.
[0031] В частности, модуль 123 определения нахождения внутри/за пределами области может определять то, сколько из движущегося впереди транспортного средства Vp расположено на внешней стороне (внешней стороне DOL или внешней стороне DOR, не проиллюстрированной на фиг. 2, см. см. фиг. 4A) бокового края DL или бокового края DR. Например, ширина (доля) фрагмента движущегося впереди транспортного средства Vp за пределами области DA отображения определяется на основе всей ширины вида сзади движущегося впереди транспортного средства Vp.
[0032] Процессор 130 отображения отображает изображение 200 маркера, соответствующее позиции движущегося впереди транспортного средства Vp, обнаруженного посредством детектора 110 движущихся впереди транспортных средств, на дисплее 140 HUD-изображений. В частности, процессор 130 отображения отображает изображение 200 маркера в области DA отображения.
[0033] В частности, когда модуль 120 определения определяет то, что движущееся впереди транспортное средство Vp расположено на внешней стороне одного из боковых краев области DA отображения по ширине транспортного средства (бокового края DL или бокового края DR, то же применимо далее), процессор 130 отображения продолжает отображать изображение 200 маркера в периферийном фрагменте бокового края по ширине транспортного средства, на внешней стороне которого расположено движущееся впереди транспортное средство Vp. "Периферийный фрагмент" означает позицию на боковом крае по ширине транспортного средства, на внешней стороне которого расположено движущееся впереди транспортное средство Vp, либо фрагмент рядом или вокруг этой позиции.
[0034] Другими словами, процессор 130 отображения продолжает отображать изображение 200 маркера в области DA отображения, когда движущееся впереди транспортное средство Vp расположено на внешней стороне области DA отображения, при условии, что движущееся впереди транспортное средство Vp захватывается для слежения посредством устройства для адаптивного автоматического регулирования скорости.
[0035] Ниже описывается конкретное отображение изображения 200 маркера посредством процессора 130 отображения.
[0036] Во-первых, когда движущееся впереди транспортное средство Vp расположено в области DA отображения, процессор 130 отображения отображает изображение 200 маркера ниже движущегося впереди транспортного средства Vp. Когда движущееся впереди транспортное средство Vp частично расположено на внешней стороне бокового края области DA отображения по ширине транспортного средства, процессор 130 отображения может уменьшать ширину изображения 200 маркера в зависимости от ширины фрагмента движущегося впереди транспортного средства Vp, расположенного в области DA отображения.
[0037] Следует отметить, что ширина изображения 200 маркера означает размер изображения 200 маркера в горизонтальном направлении (направлении слева направо) области DA отображения.
[0038] Когда всё движущееся впереди транспортное средство Vp расположено на внешней стороне бокового края области DA отображения по ширине транспортного средства, процессор 130 отображения может отображать значок 300 (не проиллюстрированный на фиг. 2, см. фиг. 5C), указывающий движущееся впереди транспортное средство Vp рядом с изображением 200 маркера.
[0039] Процессор 130 отображения может отображать изображение 200 маркера ниже движущегося впереди транспортного средства Vp, когда движущееся впереди транспортное средство Vp расположено в области DA отображения, и перемещать изображение 200 маркера к стороне движущегося впереди транспортного средства Vp по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне бокового края области DA отображения по ширине транспортного средства, увеличивается.
[0040] Кроме того, процессор 130 отображения может уменьшать размер изображения 200 маркера при движении изображения 200 маркера к стороне движущегося впереди транспортного средства Vp по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне бокового края области DA отображения по ширине транспортного средства, увеличивается.
[0041] Процессор 130 отображения может отображать изображение 200 маркера, имеющее форму дуги вокруг предварительно определенной позиции в движущемся впереди транспортном средстве Vp, ниже движущегося впереди транспортного средства Vp, когда движущееся впереди транспортное средство Vp расположено в области DA отображения.
[0042] В частности, процессор 130 отображения отображает изображение 200 маркера, имеющее форму дуги вокруг центра CT (не проиллюстрирован на фиг. 2, см. фиг. 7A) вида сзади движущегося впереди транспортного средства Vp, в качестве предварительно определенной позиции. Следует отметить, что центр CT вида сзади движущегося впереди транспортного средства Vp может представлять собой точку, в которой прямая линия, соединяющая верхний левый конец и нижний правый конец движущегося впереди транспортного средства Vp, пересекает прямую линию, соединяющую верхний правый конец и нижний левый конец движущегося впереди транспортного средства Vp. Тем не менее, центр CT не обязательно должен представлять собой такую позицию.
[0043] Центр CT может представлять собой точку, в которой прямая линия, проходящая через центр движущегося впереди транспортного средства Vp в направлении ширины транспортного средства, пересекает прямую линию, проходящую через центр движущегося впереди транспортного средства Vp в направлении высоты транспортного средства. Кроме того, центр CT может быть немного отклонен от вышеуказанных точек пересечения.
[0044] Кроме того, процессор 130 отображения может уменьшать длину дуги изображения 200 маркера при повороте изображения 200 маркера вокруг предварительно определенной позиции в движущемся впереди транспортном средстве Vp, чтобы перемещать изображение 200 маркера к стороне движущегося впереди транспортного средства Vp, по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне бокового края области DA отображения по ширине транспортного средства, увеличивается.
[0045] В этом случае, процессор 130 отображения может фиксировать длину дуги изображения 200 маркера, когда предварительно определенная позиция в движущемся впереди транспортном средстве Vp отстоит от бокового края области DA отображения на предварительно определенное расстояние или больше.
[0046] Процессор 130 отображения может отображать изображение 200 маркера с предварительно определенной шириной ниже движущегося впереди транспортного средства Vp, когда движущееся впереди транспортное средство Vp расположено в области DA отображения, и продолжать отображать изображение 200 маркера с предварительно определенной шириной, когда движущееся впереди транспортное средство Vp расположено на внешней стороне бокового края области DA отображения.
[0047] Следует отметить, что, как описано выше, ширина изображения 200 маркера представляет собой размер изображения 200 маркера в горизонтальном направлении (направлении слева направо) области DA отображения, и хотя не ограничено конкретным образом, предварительно определенная ширина предпочтительно является аналогичной всей ширине движущегося впереди транспортного средства Vp в нижнем фрагменте вида сзади движущегося впереди транспортного средства Vp.
[0048] Процессор 130 отображения может изменять цвет изображения 200 маркера по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне бокового края области DA отображения по ширине транспортного средства, увеличивается.
[0049] В частности, процессор 130 отображения отображает изображение 200 маркера с первым цветом (например, зеленым цветом), когда движущееся впереди транспортное средство Vp расположено в области DA отображения.
[0050] Между тем, процессор 130 отображения отображает изображение 200 маркера со вторым цветом (например, синим цветом), отличающимся от первого цвета, когда движущееся впереди транспортное средство Vp частично расположено на внешней стороне бокового края области DA отображения по ширине транспортного средства. Кроме того, процессор 130 отображения отображает изображение 200 маркера с третьим цветом (например, оранжевым цветом), отличающимся от первого и второго цветов, когда все движущееся впереди транспортное средство Vp расположено на внешней стороне бокового края области DA отображения.
[0051] Кроме того, процессор 130 отображения может уменьшать толщину изображения 200 маркера по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне бокового края области DA отображения по ширине транспортного средства, увеличивается. Толщина изображения 200 маркера означает размер изображения 200 маркера в направлении, ортогональном к ширине.
[0052] Процессор 130 отображения может изменять пространственную частоту изображения 200 маркера по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне бокового края области DA отображения по ширине транспортного средства, увеличивается. Пространственная частота изображения 200 маркера означает число линий, включенных в единичную длину. Когда пространственная частота является низкой, изображение является тусклым, а когда пространственная частота является высокой, изображение является резким.
[0053] Процессор 130 отображения может изменять временную частоту изображения 200 маркера по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне бокового края области DA отображения по ширине транспортного средства, увеличивается. Временная частота изображения 200 маркера означает частоту отображения изображения. Когда временная частота является низкой, изображение мигает медленно, и когда временная частота является высокой, изображение мигает быстро или отображается постоянно.
[0054] Ниже подробнее описываются конкретные примеры отображения изображения 200 маркера в вышеуказанном процессоре 130 отображения.
[0055] Дисплей 140 HUD-изображений представляет собой дисплей на лобовом стекле (HUD), который отображает изображения в области DA отображения. В варианте осуществления, дисплей 140 HUD-изображений конфигурирует дисплей.
[0056] Как описано выше, дисплей 140 HUD-изображений представляет собой дисплей на лобовом стекле в стиле дополненной реальности (AR-HUD), который может отображать виртуальные символы (изображение 200 маркера и т.п.) вместе с объектами, просматриваемыми водителем через ветровое стекло FW.
[0057] В варианте осуществления, дисплей 140 HUD-изображений отображает требуемое изображение на жидкокристаллическом дисплее и т.п. и отражает это изображение посредством использования зеркала, чтобы отображать изображение на ветровом стекле FW в качестве виртуального изображения.
[0058] Работа устройства отображения транспортного средства
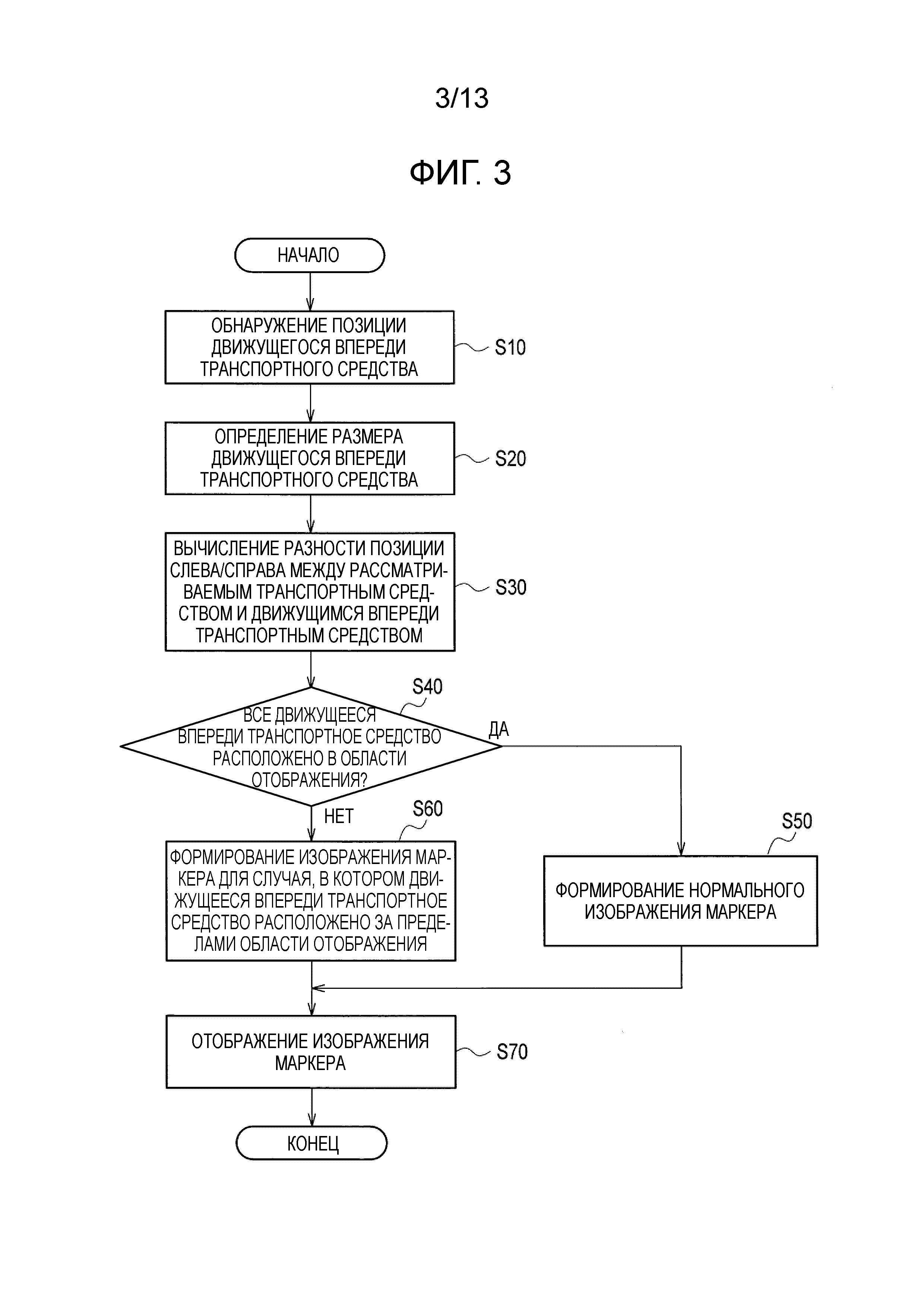
Фиг. 3 иллюстрирует последовательность операций отображения изображений маркера устройства 100 отображения транспортного средства. Как проиллюстрировано на фиг. 3, устройство 100 отображения транспортного средства обнаруживает позицию движущегося впереди транспортного средства Vp (S10). Кроме того, устройство 100 отображения транспортного средства определяет размер движущегося впереди транспортного средства Vp (S20). Следует отметить, что это описание основано на таком допущении, что движущееся впереди транспортное средство Vp захватывается для слежения посредством устройства для адаптивного автоматического регулирования скорости.
[0059] В частности, устройство 100 отображения транспортного средства определяет координатные данные движущегося впереди транспортного средства Vp и определяет размер движущегося впереди транспортного средства Vp, просматриваемого водителем в области DA отображения.
[0060] Устройство 100 отображения транспортного средства вычисляет разность позиции слева/справа между рассматриваемым транспортным средством и движущимся впереди транспортным средством Vp, на основе обнаруженной позиции и размера движущегося впереди транспортного средства Vp (S30).
[0061] В частности, устройство 100 отображения транспортного средства вычисляет разность позиции слева/справа между рассматриваемым транспортным средством и движущимся впереди транспортным средством Vp в области DA отображения.
[0062] Устройство 100 отображения транспортного средства определяет то, расположено или нет все движущееся впереди транспортное средство Vp в области DA отображения, на основе вычисленной разности позиции слева/справа (S40).
[0063] В частности, устройство 100 отображения транспортного средства определяет то, расположен или нет весь вид сзади движущегося впереди транспортного средства Vp в направлении ширины в области DA отображения.
[0064] Когда все движущееся впереди транспортное средство Vp расположено в области DA отображения, устройство 100 отображения транспортного средства формирует нормальное изображение 200 маркера (S50). Между тем, когда движущееся впереди транспортное средство Vp расположено частично или полностью за пределами области DA отображения, устройство 100 отображения транспортного средства формирует изображение 200 маркера для случая, в котором движущееся впереди транспортное средство Vp расположено частично или полностью за пределами области DA отображения (S60).
[0065] Устройство 100 отображения транспортного средства отображает сформированное изображение 200 маркера в области DA отображения посредством использования дисплея на лобовом стекле (HUD) (S70). В частности, устройство 100 отображения транспортного средства отображает нормальное изображение 200 маркера или изображение 200 маркера для случая, в котором движущееся впереди транспортное средство Vp расположено частично или полностью за пределами области DA отображения.
[0066] Примеры отображения изображений посредством устройства отображения транспортного средства
Далее описываются примеры отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства со ссылкой на фиг. 4-13.
[0067] (1) Пример 1 отображения
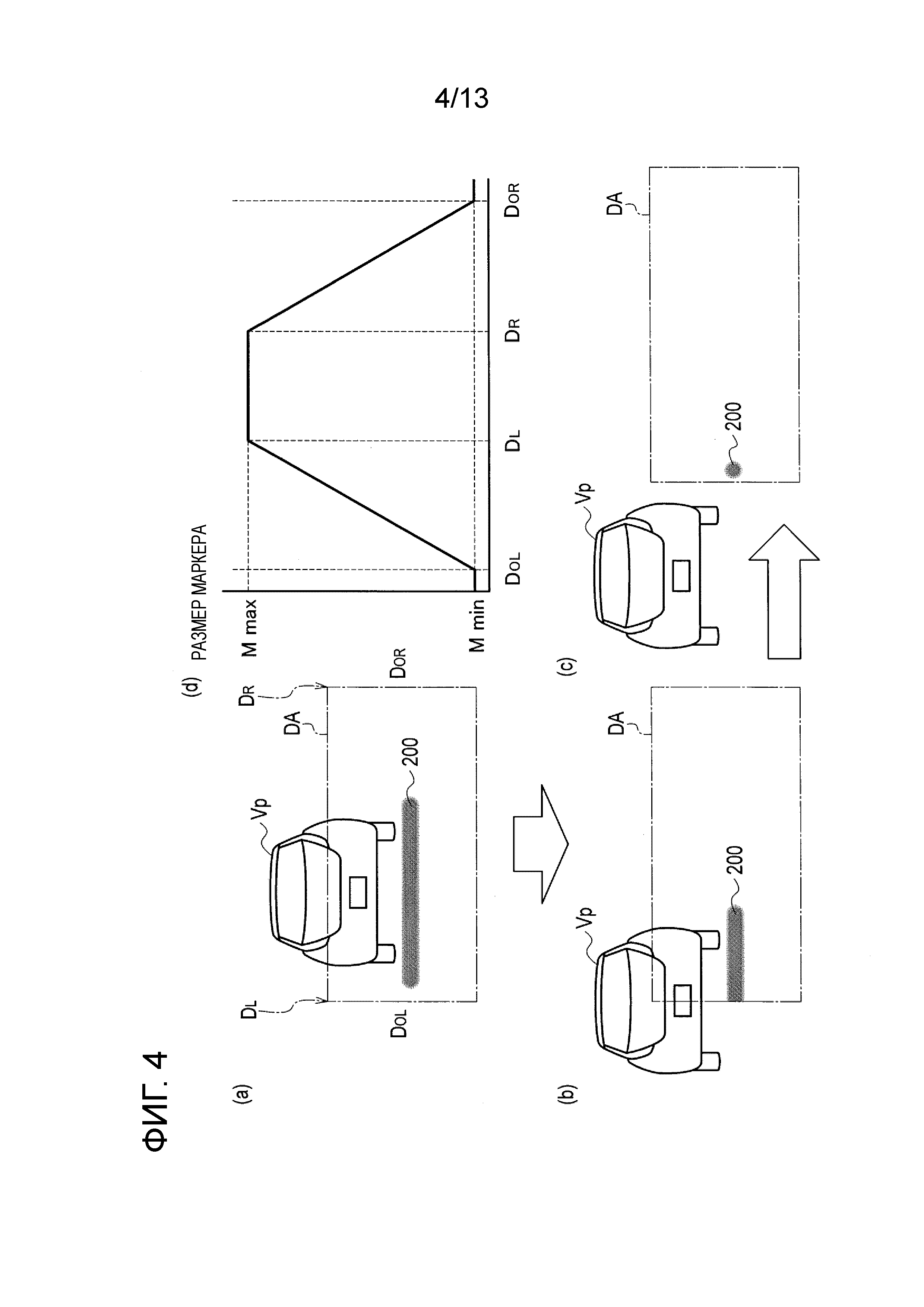
Фиг. 4A-4D являются видами, поясняющими пример 1 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
[0068] Фиг. 4A иллюстрирует пример отображения изображения 200 маркера в случае, если движущееся впереди транспортное средство Vp расположено в области DA отображения. Фиг. 4B иллюстрирует пример отображения изображения 200 маркера в случае, если движущееся впереди транспортное средство Vp частично расположено за пределами области DA отображения. Фиг. 4C иллюстрирует пример отображения изображения 200 маркера в случае, если все движущееся впереди транспортное средство Vp расположено за пределами области DA отображения.
[0069] Следует отметить, что "движущееся впереди транспортное средство Vp расположено в области DA отображения" означает позицию в направлении ширины движущегося впереди транспортного средства Vp, которая представляет собой позицию в горизонтальном направлении области DA отображения, как проиллюстрировано на фиг. 4A.
[0070] В отличие от этого, движущееся впереди транспортное средство Vp, в общем, частично расположено за пределами области DA отображения в вертикальном направлении области DA отображения, как проиллюстрировано на фиг. 4A. То, устанавливается или нет такая позиционная взаимосвязь, зависит от размера области DA отображения в вертикальном направлении и от позиции точки обзора водителя, которая варьируется в зависимости от типа (легковой автомобиль, SUV/минифургон или грузовик/автобус) транспортного средства V, как и следовало ожидать.
[0071] Как проиллюстрировано на фиг. 4A, когда движущееся впереди транспортное средство Vp расположено в области DA отображения (между боковым краем DL и боковым краем DR), устройство 100 отображения транспортного средства отображает изображение 200 маркера ниже движущегося впереди транспортного средства Vp.
[0072] Между тем, как проиллюстрировано на фиг. 4B, когда движущееся впереди транспортное средство Vp частично расположено на внешней стороне DOL бокового края DL области DA отображения, устройство 100 отображения транспортного средства уменьшает ширину изображения 200 маркера в зависимости от ширины фрагмента движущегося впереди транспортного средства Vp, расположенного в области DA отображения.
[0073] В частности, устройство 100 отображения транспортного средства отображает изображение 200 маркера с шириной, идентичной ширине фрагмента движущегося впереди транспортного средства Vp, расположенного в области DA отображения.
[0074] Кроме того, как проиллюстрировано на фиг. 4C, когда все движущееся впереди транспортное средство Vp расположено на внешней стороне DOL области DA отображения, устройство 100 отображения транспортного средства не прекращает отображение изображения 200 маркера и продолжает отображать его. Хотя круглое точечное изображение 200 маркера отображается в примере, проиллюстрированном на фиг. 4C, форма изображения 200 маркера может быть другой.
[0075] Кроме того, хотя случай, в котором движущееся впереди транспортное средство Vp перемещается к внешней стороне DOL области DA отображения, проиллюстрирован на фиг. 4A-4C, аналогичная обработка выполняется на стороне бокового края DR также в случае, если движущееся впереди транспортное средство Vp перемещается к внешней стороне DOR правого бокового края DR области DA отображения (то же применимо далее).
[0076] Фиг. 4D иллюстрирует взаимосвязь между позицией движущегося впереди транспортного средства Vp и размером (M) изображения 200 маркера. Как проиллюстрировано на фиг. 4D, размер (ширина) изображения 200 маркера уменьшается по мере того, как фрагмент движущегося впереди транспортного средства Vp за пределами бокового края DL или бокового края DR увеличивается. Кроме того, изображение 200 маркера продолжает отображаться с минимальным размером, когда все движущееся впереди транспортное средство Vp расположено на внешней стороне DOL или внешней стороне DOR.
[0077] (2) Пример 2 отображения
Фиг. 5A-5C являются видами, поясняющими пример 2 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства. Ниже главным образом описываются фрагменты, отличающиеся от фрагментов в вышеуказанном примере 1 отображения. Кроме того, иллюстрация бокового края DL, бокового края DR, внешней стороны DOL и внешней стороны DOR опускается надлежащим образом.
[0078] Фиг. 5A и 5B являются аналогичными фиг. 4A и 4B, описанным в примере 1 отображения. Фиг. 5C также является аналогичным фиг. 4C, описанному в примере 1 отображения, но значок 300 отображается вместе с изображением 200 маркера.
[0079] Значок 300 представляет собой изображение, указывающее движущееся впереди транспортное средство Vp. Устройство 100 отображения транспортного средства отображает значок 300 рядом с изображением 200 маркера. В примере 2 отображения, изображение, смоделированное после вида сзади движущегося впереди транспортного средства Vp, используется в качестве значка 300.
[0080] Другими словами, устройство 100 отображения транспортного средства отображает значок 300, указывающий движущееся впереди транспортное средство Vp, рядом с изображением 200 маркера, когда все движущееся впереди транспортное средство Vp расположено на внешней стороне бокового края области DA отображения.
[0081] Значок 300 не ограничен вышеуказанным изображением, и другое изображение может использоваться при условии, что водитель может легко распознавать то, что изображение указывает движущееся впереди транспортное средство Vp. Например, устройство 100 отображения транспортного средства может обнаруживать тип (SUV/минифургон, грузовик/автобус и т.п.) движущегося впереди транспортного средства Vp и отображать значок 300, указывающий вид сзади транспортного средства, указываемого заранее, в зависимости от обнаруженного типа.
[0082] (3) Пример 3 отображения
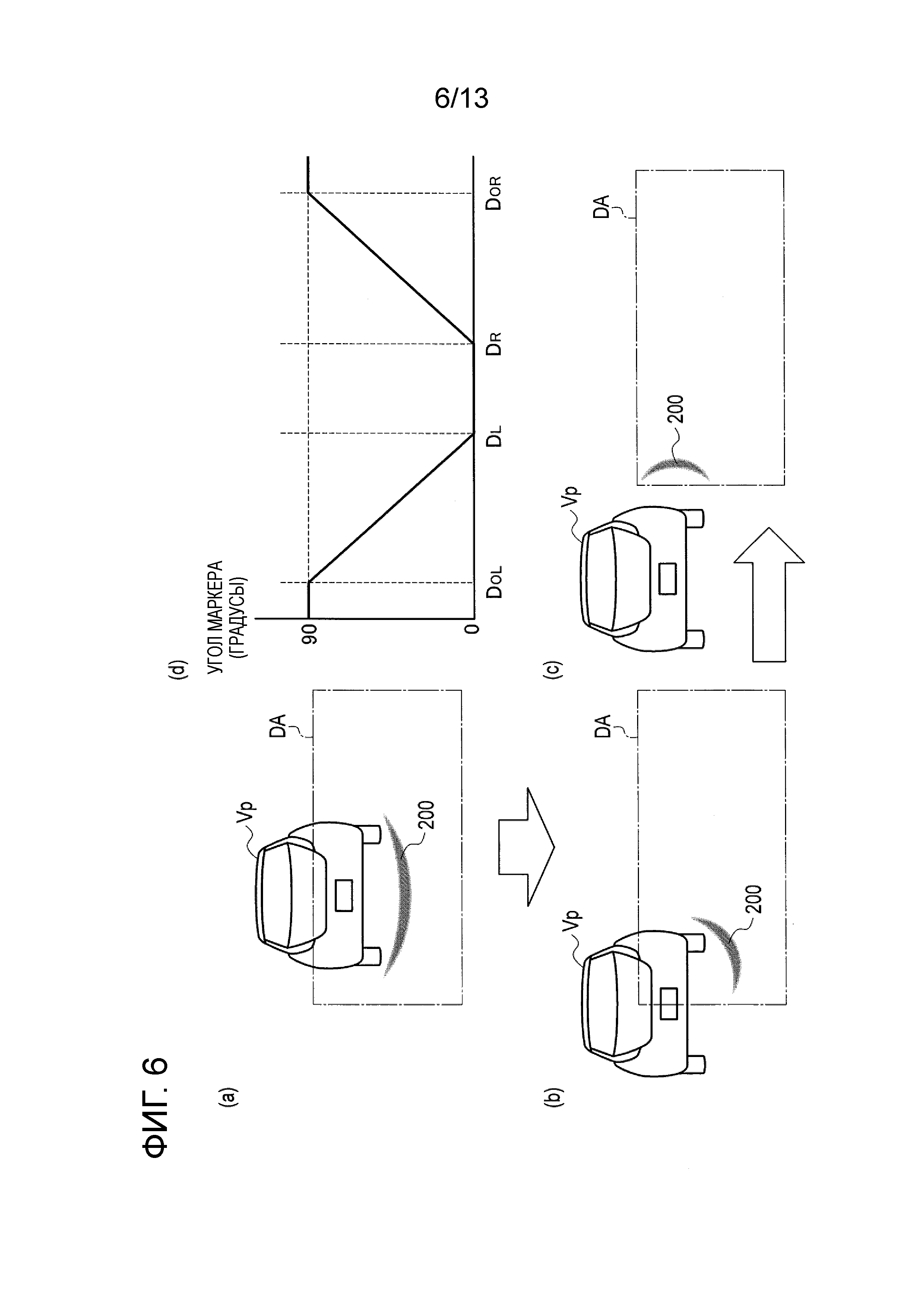
Фиг. 6A-6D являются видами, поясняющими пример 3 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
[0083] Фиг. 6A иллюстрирует пример отображения изображения 200 маркера в случае, если движущееся впереди транспортное средство Vp расположено в области DA отображения. Фиг. 6B иллюстрирует пример отображения изображения 200 маркера в случае, если движущееся впереди транспортное средство Vp частично расположено за пределами области DA отображения. Фиг. 6C иллюстрирует пример отображения изображения 200 маркера в случае, если все движущееся впереди транспортное средство Vp расположено за пределами области DA отображения.
[0084] Как проиллюстрировано на фиг. 6A, когда движущееся впереди транспортное средство Vp расположено в области DA отображения, устройство 100 отображения транспортного средства отображает изображение 200 маркера ниже движущегося впереди транспортного средства Vp. Следует отметить, что, в примере 3 отображения, отображается серповидное изображение 200 маркера.
[0085] Как проиллюстрировано на фиг. 6B и 6C, устройство 100 отображения транспортного средства перемещает изображение 200 маркера к стороне движущегося впереди транспортного средства Vp по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне DOL бокового края DL области DA отображения, увеличивается.
[0086] В частности, устройство 100 отображения транспортного средства поворачивает серповидное изображение 200 маркера и постепенно перемещает изображение 200 маркера из позиции ниже движущегося впереди транспортного средства Vp в позицию на стороне движущегося впереди транспортного средства Vp, по мере того, как движущееся впереди транспортное средство Vp перемещается за пределы области DA отображения.
[0087] Как проиллюстрировано на фиг. 6C, когда все движущееся впереди транспортное средство Vp расположено на внешней стороне DOL области DA отображения, изображение 200 маркера отображается справа движущегося впереди транспортного средства Vp при повороте на 90 градусов из позиции на фиг. 6A. Следует отметить, что, когда все движущееся впереди транспортное средство Vp расположено на внешней стороне DOR области DA отображения, изображение 200 маркера отображается на левой стороне движущегося впереди транспортного средства Vp.
[0088] Фиг. 6D иллюстрирует взаимосвязь между позицией движущегося впереди транспортного средства Vp и углом изображения 200 маркера. Как проиллюстрировано на фиг. 6D, по мере того, как фрагмент движущегося впереди транспортного средства Vp за пределами бокового края DL или бокового края DR увеличивается, угол изображения 200 маркера увеличивается. На фиг. 6D, горизонтальное направление составляет 0 градусов, а перпендикулярное направление составляет 90 градусов.
[0089] Хотя серповидное изображение 200 маркера используется в примере 3 отображения, изображение 200 маркера не обязательно должно иметь серповидную форму и может иметь, например, полосковую форму, как проиллюстрировано в примере 1 отображения.
[0090] Кроме того, в примере 3 отображения, устройство 100 отображения транспортного средства уменьшает размер изображения 200 маркера при перемещении изображения 200 маркера к стороне движущегося впереди транспортного средства Vp, по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне DOL бокового края DL области DA отображения, увеличивается. Тем не менее, такое изменение размера не является обязательным.
[0091] (4) Пример 4 отображения
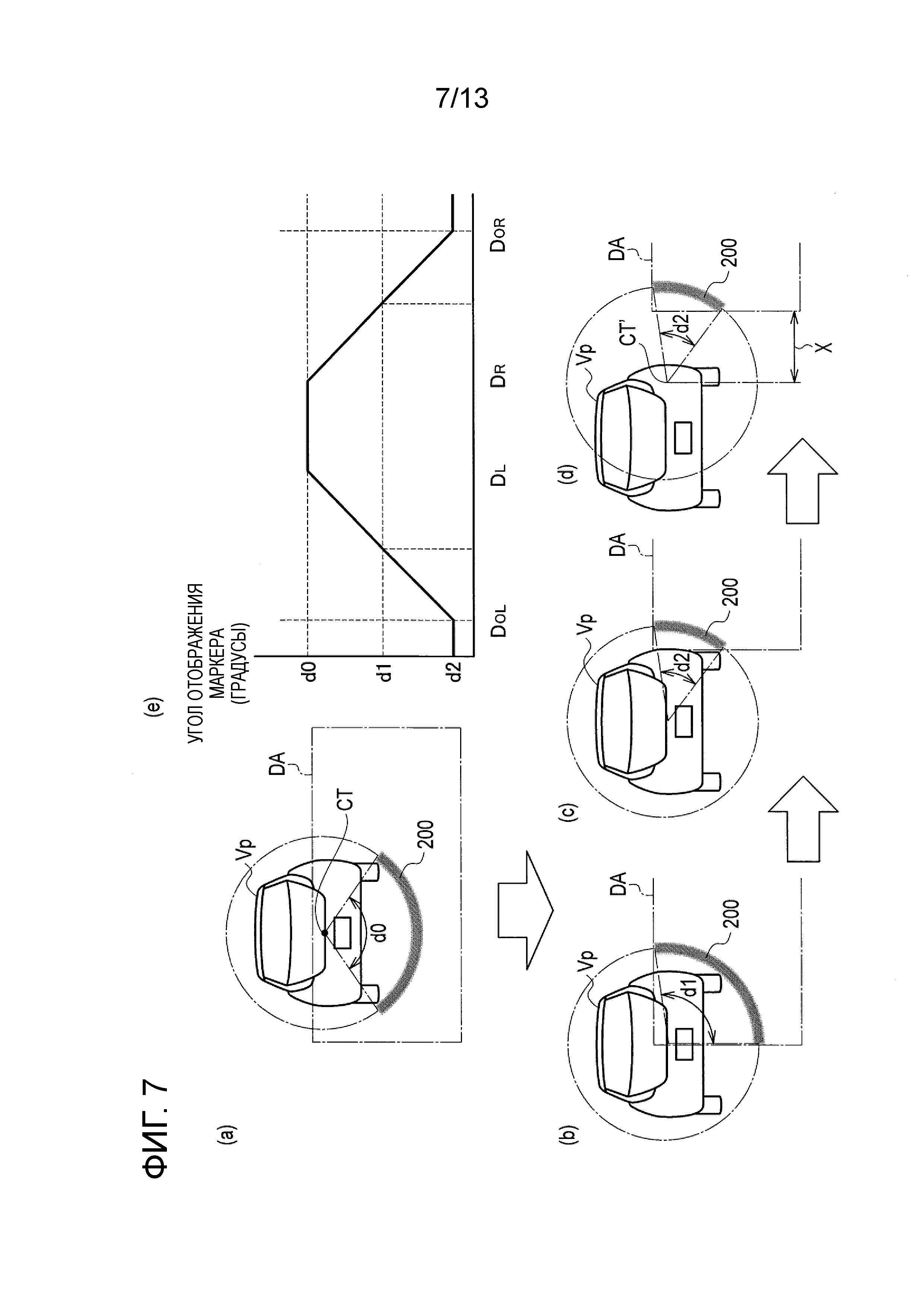
Фиг. 7A-7E являются видами, поясняющими пример 4 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства.
[0092] Фиг. 7A иллюстрирует пример отображения изображения 200 маркера в случае, если движущееся впереди транспортное средство Vp расположено в области DA отображения. Фиг. 7B иллюстрирует пример отображения изображения 200 маркера в случае, если движущееся впереди транспортное средство Vp частично расположено за пределами области DA отображения.
[0093] Фиг. 7C и 7D иллюстрируют примеры отображения изображения 200 маркера в случае, если все движущееся впереди транспортное средство Vp расположено за пределами области DA отображения.
[0094] Как проиллюстрировано на фиг. 7A, когда движущееся впереди транспортное средство Vp расположено в области DA отображения, устройство 100 отображения транспортного средства отображает изображение 200 маркера, имеющее форму дуги вокруг предварительно определенной позиции в движущемся впереди транспортном средстве Vp, ниже движущегося впереди транспортного средства Vp.
[0095] В частности, устройство 100 отображения транспортного средства отображает изображение 200 маркера, имеющее форму дуги вокруг центра CT. Как проиллюстрировано на фиг. 7A, когда движущееся впереди транспортное средство Vp расположено в области DA отображения, угол, сформированный посредством нормалей, соединяющих центр CT и оба конца изображения 200 маркера, составляет d0. В примере 4 отображения, d0 превышает прямой угол.
[0096] Как проиллюстрировано на фиг. 7B и 7C, устройство 100 отображения транспортного средства уменьшает длину дуги изображения 200 маркера при повороте изображения 200 маркера вокруг центра CT (предварительно определенной позиции), чтобы перемещать изображение 200 маркера к стороне движущегося впереди транспортного средства Vp, по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне DOL бокового края DL области DA отображения, увеличивается.
[0097] В частности, устройство 100 отображения транспортного средства поворачивает изображение 200 маркера, имеющее форму дуги вокруг центра CT, чтобы перемещать изображение 200 маркера к стороне движущегося впереди транспортного средства Vp.
[0098] Одновременно, устройство 100 отображения транспортного средства уменьшает длину дуги изображения 200 маркера относительно длины дуги в случае, если движущееся впереди транспортное средство Vp расположено в области DA отображения. Более конкретно, устройство 100 отображения транспортного средства задает угол между нормалями, соединяющими центр CT и оба конца изображения 200 маркера, равным d1, меньшему d0.
[0099] Следует отметить, что, в примере 4 отображения, длина дуги изображения 200 маркера означает длину от одного конца до другого конца дугообразного изображения 200 маркера.
[0100] Как проиллюстрировано на фиг. 7C, когда все движущееся впереди транспортное средство Vp расположено на внешней стороне DOL области DA отображения, устройство 100 отображения транспортного средства дополнительно уменьшает длину изображения 200 маркера. Более конкретно, устройство 100 отображения транспортного средства задает угол между нормалями, соединяющими центр CT и оба конца изображения 200 маркера, равным d2, меньшему d1.
[0101] Кроме того, как проиллюстрировано на фиг. 7D, устройство 100 отображения транспортного средства фиксирует длину дуги изображения 200 маркера, когда центр CT движущегося впереди транспортного средства Vp отстоит от бокового края DL области DA отображения на предварительно определенное расстояние X или больше.
[0102] В частности, когда центр CT движущегося впереди транспортного средства Vp отстоит от бокового края DL на расстояние X или больше, устройство 100 отображения транспортного средства задает угол между нормалями, соединяющими центр CT и оба конца изображения 200 маркера, равным d2, аналогично состоянию, проиллюстрированному на фиг. 7C, и фиксирует длину дуги изображения 200 маркера.
[0103] В примере, проиллюстрированном на фиг. 7D, хотя центр CT движущегося впереди транспортного средства Vp отстоит от бокового края DL на расстояние X или больше, изображение 200 маркера, имеющее форму дуги вокруг виртуального центра CT', отображается аналогично состоянию, проиллюстрированному на фиг. 7C. Другими словами, в примере 4 отображения, изображение 200 маркера, проиллюстрированное на фиг. 7C, и изображение 200 маркера, проиллюстрированное на фиг. 7D, имеют идентичный размер и отображаются в идентичной позиции.
[0104] Следует отметить, что, как описано выше, центр CT не обязательно должен представлять собой центр CT движущегося впереди транспортного средства Vp и может немного отклоняться от него.
[0105] Фиг. 7E иллюстрирует взаимосвязь между позицией движущегося впереди транспортного средства Vp и углом изображения 200 маркера. Как проиллюстрировано на фиг. 7E, по мере того, как фрагмент движущегося впереди транспортного средства Vp за пределами бокового края DL или бокового края DR увеличивается, угол (d0-d2) отображения изображения 200 маркера становится меньшим. Длина дугообразного изображения 200 маркера в силу этого становится меньшей. Тем не менее, когда все движущееся впереди транспортное средство Vp расположено на внешней стороне DOL или внешней стороне DOR, т.е. когда центр CT движущегося впереди транспортного средства Vp отстоит от бокового края DL на расстояние X или больше, длина дуги изображения 200 маркера более не уменьшается и является фиксированной.
[0106] (5) Пример 5 отображения
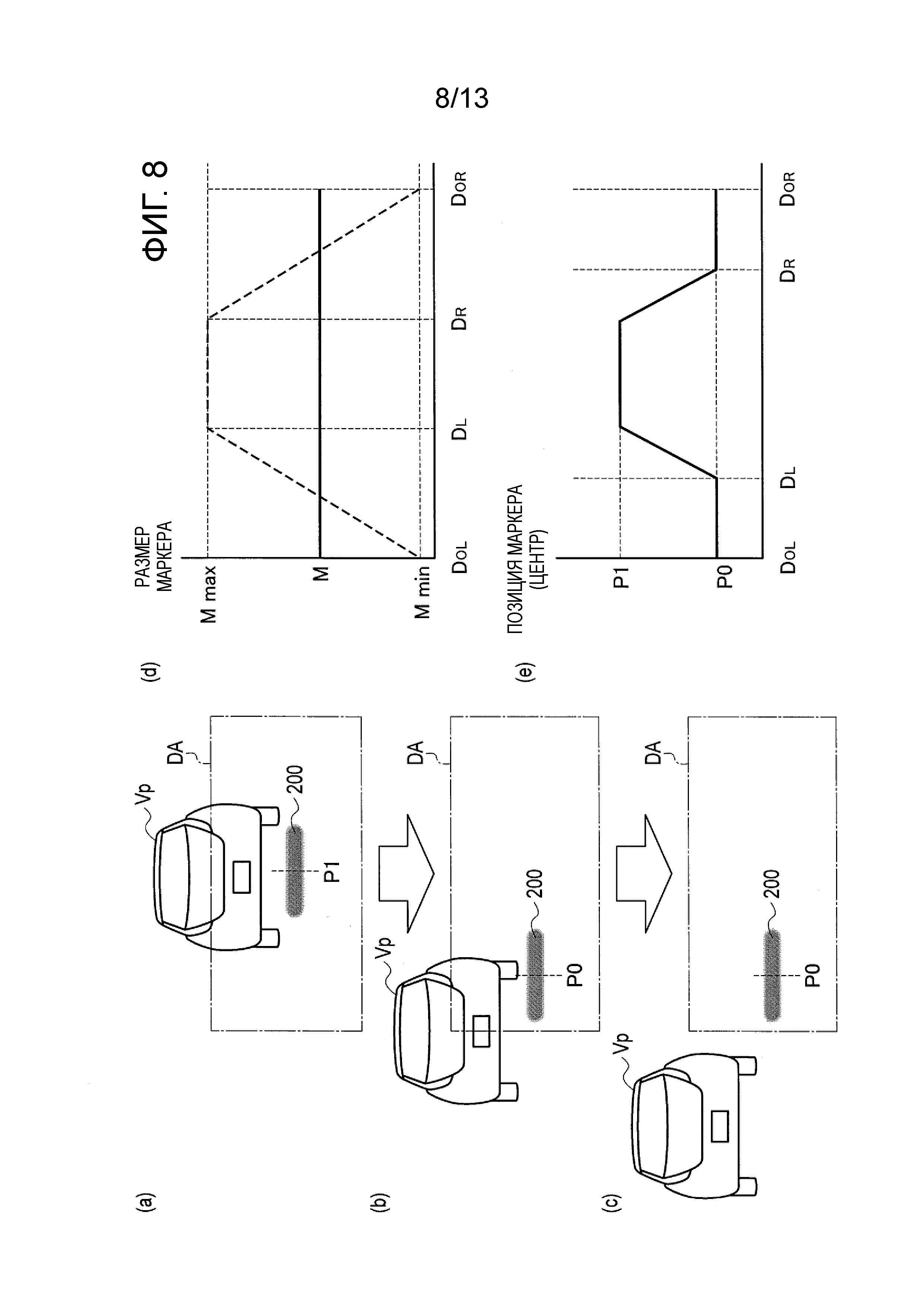
Фиг. 8A-8E являются видами, поясняющими пример 5 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства. Хотя пример 5 отображения соответствует примеру 1 отображения, ширина (размер) изображения 200 маркера является фиксированной.
[0107] Фиг. 8A иллюстрирует пример отображения изображения 200 маркера в случае, если движущееся впереди транспортное средство Vp расположено в области DA отображения. Фиг. 8B иллюстрирует пример отображения изображения 200 маркера в случае, если движущееся впереди транспортное средство Vp частично расположено за пределами области DA отображения. Фиг. 8C иллюстрирует пример отображения изображения 200 маркера в случае, если все движущееся впереди транспортное средство Vp расположено за пределами области DA отображения.
[0108] Как проиллюстрировано на фиг. 8A, когда движущееся впереди транспортное средство Vp расположено в области DA отображения, устройство 100 отображения транспортного средства отображает изображение 200 маркера с предварительно определенной шириной ниже движущегося впереди транспортного средства Vp. Кроме того, центр P1 изображения 200 маркера в направлении ширины совпадает с центром движущегося впереди транспортного средства Vp в направлении ширины.
[0109] Как проиллюстрировано на фиг. 8B и 8C, когда движущееся впереди транспортное средство Vp расположено на внешней стороне DOL бокового края DL области DA отображения, устройство 100 отображения транспортного средства продолжает отображать изображение 200 маркера с предварительно определенной шириной. В частности, ширина изображения 200 маркера является идентичной во всех случаях, в которых (i) все движущееся впереди транспортное средство Vp расположено в области DA отображения, (ii) движущееся впереди транспортное средство Vp частично расположено на внешней стороне DOL области DA отображения, и (iii) все движущееся впереди транспортное средство Vp расположено на внешней стороне DOL области DA отображения.
[0110] Соответственно, центр P0 изображения 200 маркера в направлении ширины в случаях (ii) и (iii) не совпадает с центром движущегося впереди транспортного средства Vp в направлении ширины.
[0111] Фиг. 8D иллюстрирует взаимосвязь между позицией движущегося впереди транспортного средства Vp и размером (M) изображения 200 маркера. Как проиллюстрировано на фиг. 8D, размер (M) изображения 200 маркера является фиксированным независимо от позиции движущегося впереди транспортного средства Vp. Следует отметить, что, на фиг. 8D, взаимосвязь между позицией движущегося впереди транспортного средства Vp и размером (M) изображения 200 маркера в примере 1 отображения, проиллюстрированном на фиг. 4D, проиллюстрирована посредством пунктирной линии.
[0112] Фиг. 8E иллюстрирует взаимосвязь между позицией движущегося впереди транспортного средства Vp и центром (P0, P1) изображения 200 маркера. Как проиллюстрировано на фиг. 8E, центр изображения 200 маркера перемещается к боковому краю DL (или боковому краю DR) в зависимости от позиции движущегося впереди транспортного средства Vp. Когда центр изображения 200 маркера достигает позиции P0, изображение 200 маркера дополнительно не перемещается и поддерживается в позиции P0, даже если позиция движущегося впереди транспортного средства Vp перемещается дополнительно к внешней стороне DOL (или за пределы DOR).
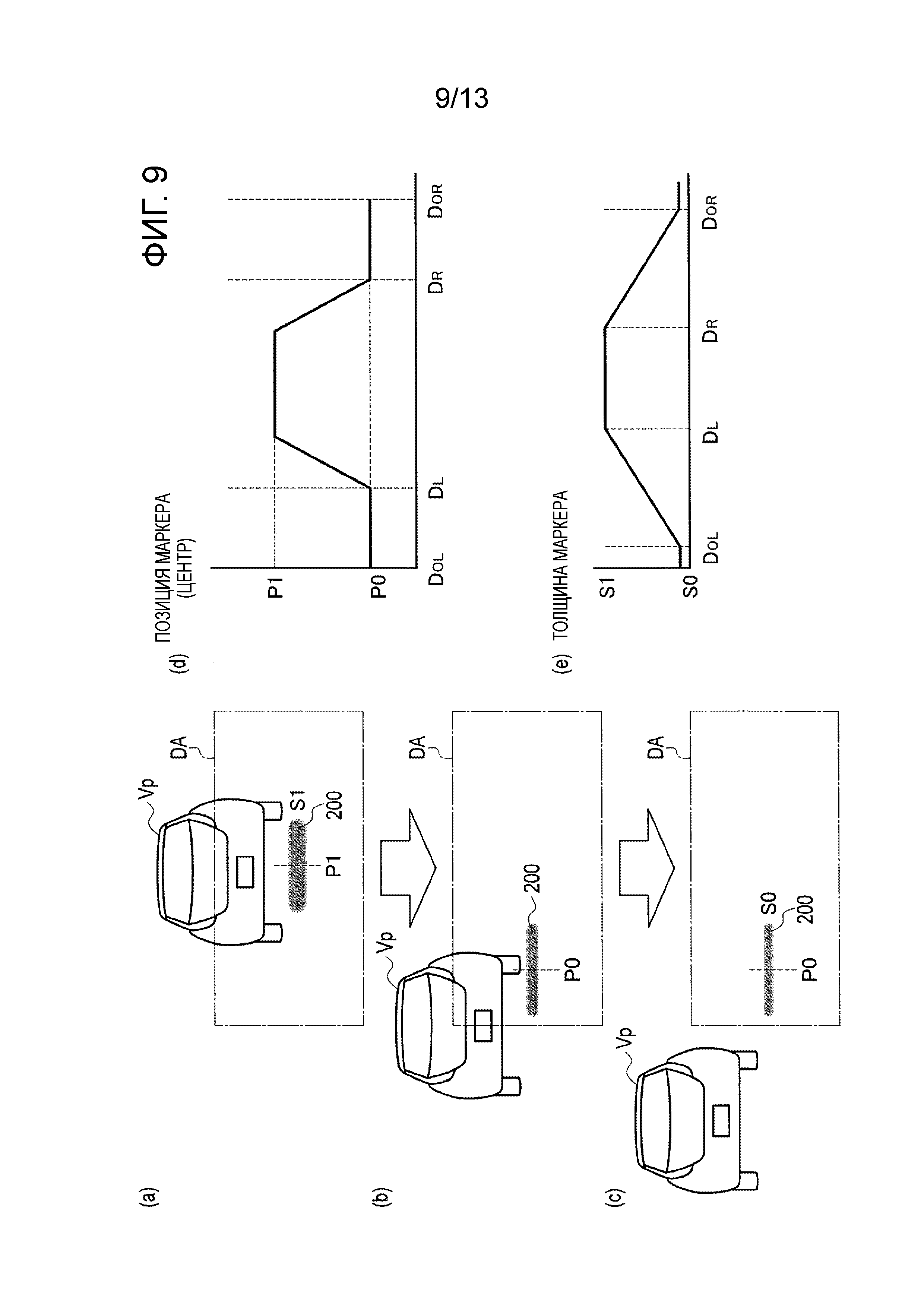
[0113] (6) Пример 6 отображения
Фиг. 9A-9E являются видами, поясняющими пример 6 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства. Пример 6 отображения является практически идентичным примеру 5 отображения, но отличается от примера 5 отображения тем, что толщина изображения 200 маркера уменьшается.
[0114] Фиг. 9A-9D соответствуют фиг. 8A-8C и 8E, соответственно. В примере 6 отображения, устройство 100 отображения транспортного средства уменьшает толщину (S0, S1) изображения 200 маркера по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне DOL бокового края DL области DA отображения, увеличивается.
[0115] Фиг. 9E иллюстрирует взаимосвязь между позицией движущегося впереди транспортного средства Vp и толщиной (S0, S1) изображения 200 маркера. Как проиллюстрировано на фиг. 9E, толщина изображения 200 маркера уменьшается по мере того, как фрагмент движущегося впереди транспортного средства Vp за пределами бокового края DL или бокового края DR увеличивается. Кроме того, изображение 200 маркера с минимальной толщиной (S0) продолжает отображаться, когда все движущееся впереди транспортное средство Vp расположено на внешней стороне DOL или внешней стороне DOR.
[0116] (7) Пример 7 отображения
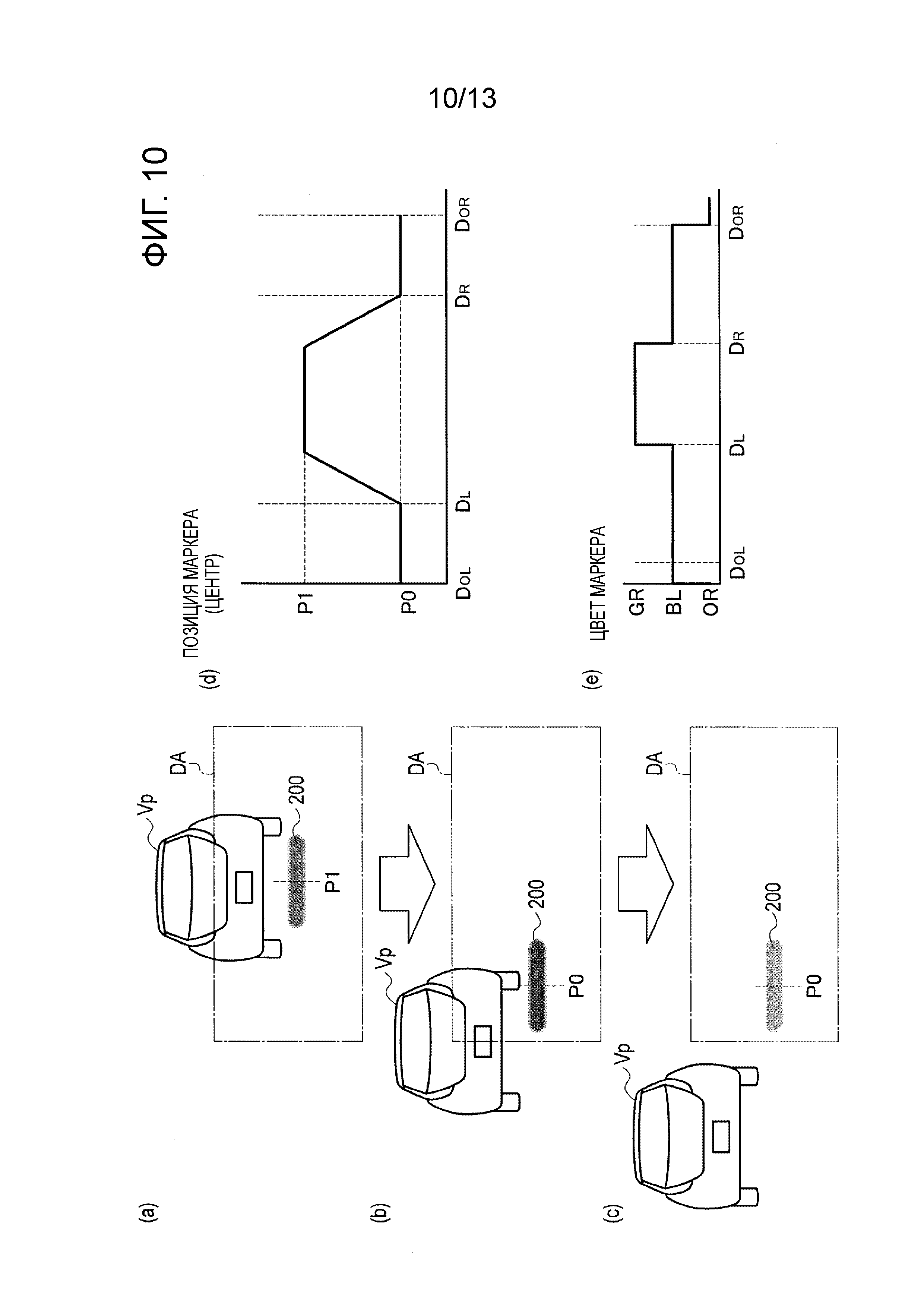
Фиг. 10A-10E являются видами, поясняющими пример 7 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства. Пример 7 отображения также является практически идентичным примеру 5 отображения, но отличается от примера 5 отображения тем, что цвет изображения 200 маркера изменяется.
[0117] Фиг. 10A-10E соответствуют фиг. 8A-8E, соответственно. В примере 7 отображения, устройство 100 отображения транспортного средства изменяет цвет изображения 200 маркера по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне DOL бокового края DL области DA отображения, увеличивается.
[0118] В частности, устройство 100 отображения транспортного средства отображает изображение 200 маркера с первым цветом, когда движущееся впереди транспортное средство Vp расположено в области DA отображения. В примере 7 отображения, изображение 200 маркера отображается с зеленым цветом (GR).
[0119] Устройство 100 отображения транспортного средства отображает изображение 200 маркера со вторым цветом, отличающимся от первого цвета, когда движущееся впереди транспортное средство Vp частично расположено на внешней стороне DOL бокового края DL области DA отображения. В примере 7 отображения, изображение 200 маркера отображается с синим цветом (BL).
[0120] Кроме того, устройство 100 отображения транспортного средства отображает изображение 200 маркера с третьим цветом, отличающимся от первого и второго цветов, когда все движущееся впереди транспортное средство Vp расположено на внешней стороне DOL бокового края DL области DA отображения. В примере 7 отображения, изображение 200 маркера отображается с оранжевым цветом (OR).
[0121] Фиг. 10E иллюстрирует взаимосвязь между позицией движущегося впереди транспортного средства Vp и цветом (GR, BL, OR) изображения 200 маркера. Как проиллюстрировано на фиг. 10E, цвет изображения 200 маркера изменяется с зеленого цвета на синий цвет и затем на оранжевый цвет по мере того, как фрагмент движущегося впереди транспортного средства Vp за пределами бокового края DL или бокового края DR увеличивается.
[0122] Следует отметить, что хотя цвет изображения 200 маркера мгновенно изменяется с зеленого цвета на синий цвет и затем на оранжевый цвет в примере 7 отображения, как проиллюстрировано на фиг. 10E, цвет изображения 200 маркера может постепенно изменяться с зеленого цвета на синий цвет и затем на оранжевый цвет.
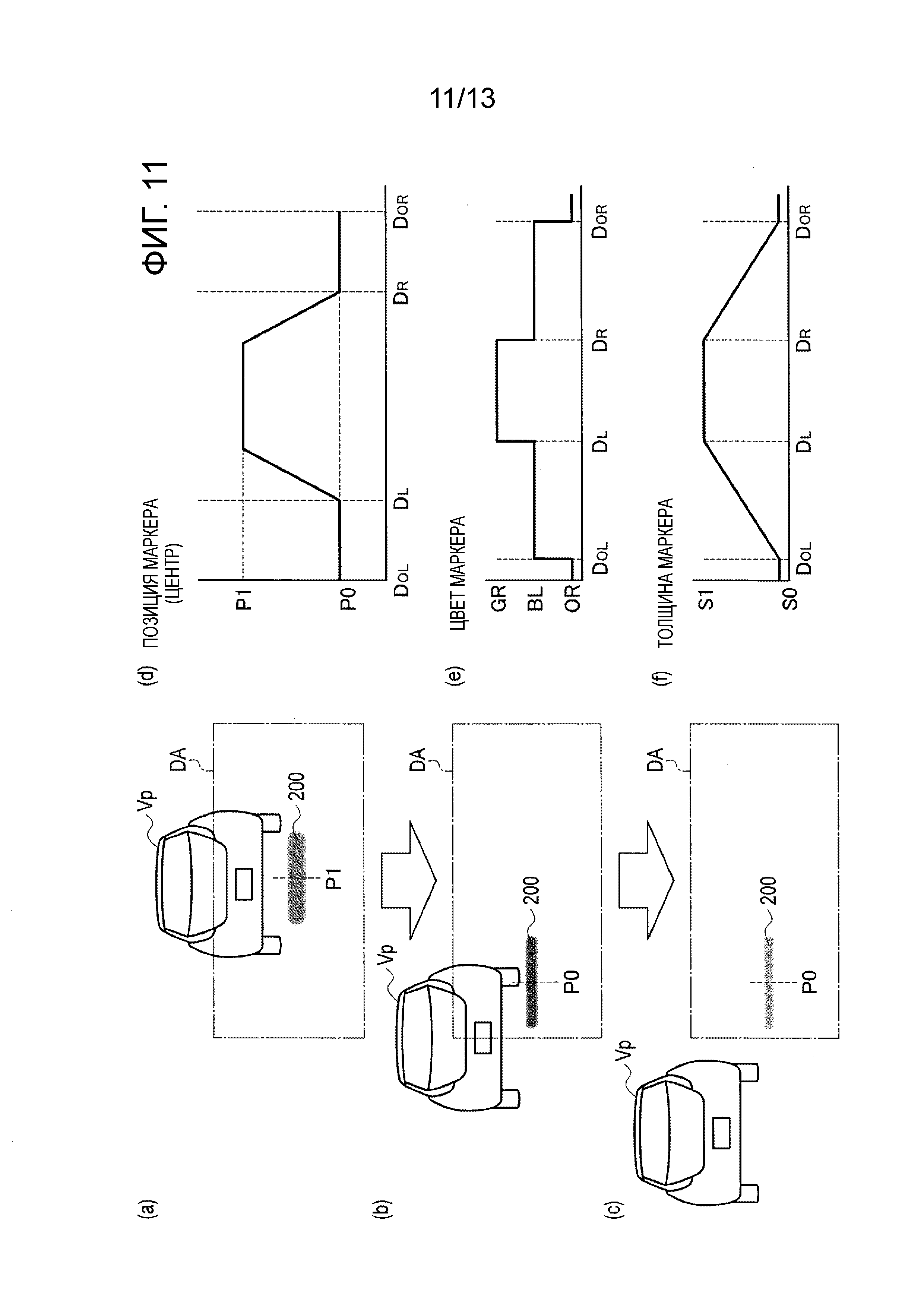
[0123] (8) Пример 8 отображения
Фиг. 11A-11F являются видами, поясняющими пример 8 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства. Пример 8 отображения является примером отображения, в котором комбинируются пример 6 отображения и пример 7 отображения, описанные выше.
[0124] Фиг. 11A-11E соответствуют фиг. 10A-10E, соответственно.
[0125] В примере 8 отображения, как проиллюстрировано на фиг. 11F, устройство 100 отображения транспортного средства уменьшает толщину (S0, S1) изображения 200 маркера по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне DOL бокового края DL области DA отображения, увеличивается.
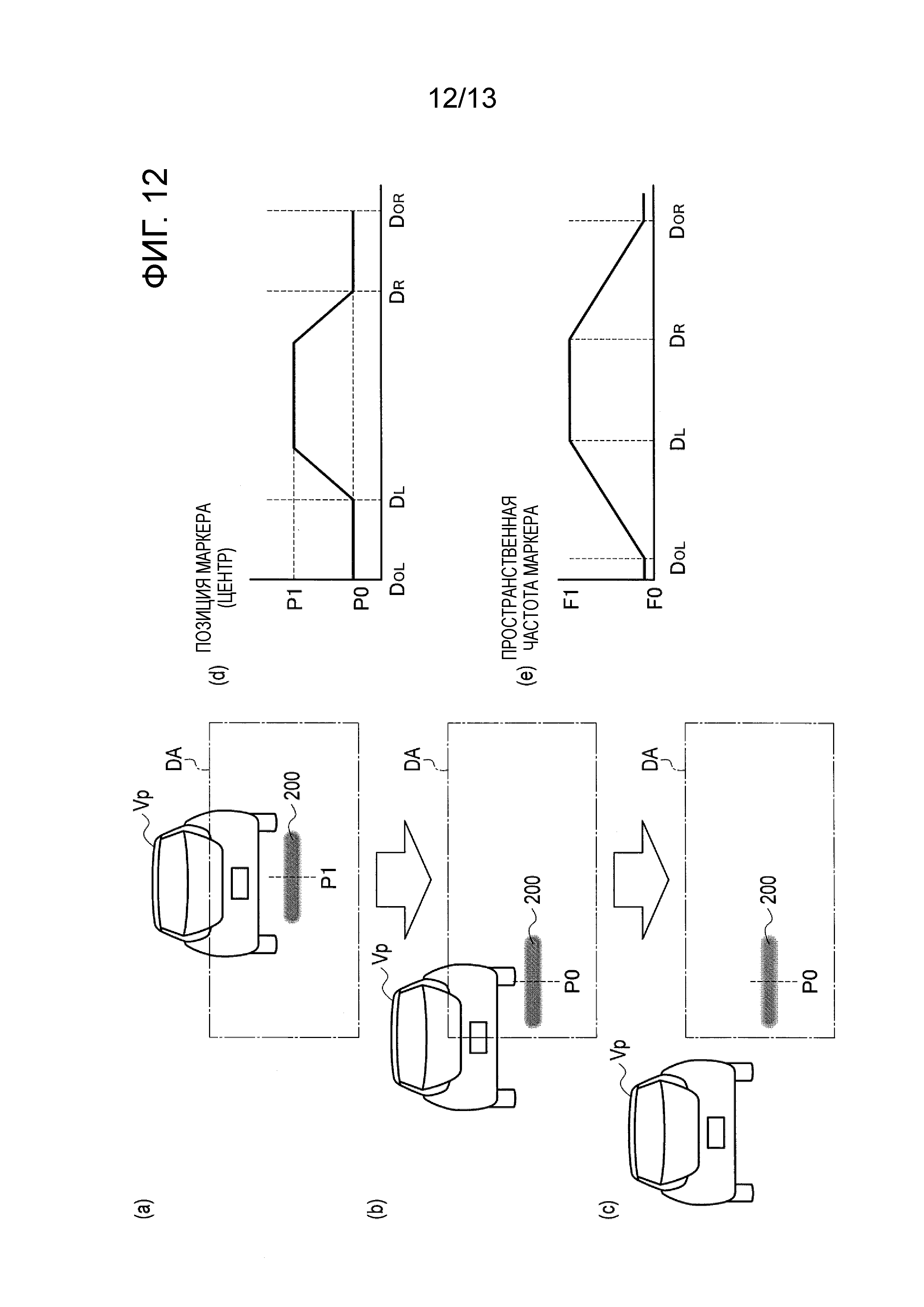
[0126] (9) Пример 9 отображения
Фиг. 12A-12E являются видами, поясняющими пример 9 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства. Пример 9 отображения также является практически идентичным примеру 5 отображения, но отличается от примера 5 отображения тем, что пространственная частота изображения 200 маркера изменяется.
[0127] Фиг. 12A-12D соответствуют фиг. 8A-8C и 8Е, соответственно.
[0128] В частности, устройство 100 отображения транспортного средства изменяет пространственную частоту изображения 200 маркера по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне DOL бокового края DL области DA отображения, увеличивается. Более конкретно, устройство 100 отображения транспортного средства уменьшает пространственную частоту (F0, F1) изображения 200 маркера по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне DOL бокового края DL области DA отображения, увеличивается.
[0129] Изображение 200 маркера в силу этого отображается таким образом, что оно становится более тусклым по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне DOL бокового края DL области DA отображения, увеличивается.
[0130] Фиг. 12E иллюстрирует взаимосвязь между позицией движущегося впереди транспортного средства Vp и пространственной частотой (F0, F1) изображения 200 маркера. Как проиллюстрировано на фиг. 12E, пространственная частота изображения 200 маркера становится более низкой по мере того, как фрагмент движущегося впереди транспортного средства Vp за пределами бокового края DL или бокового края DR увеличивается.
[0131] (4) Пример 10 отображения
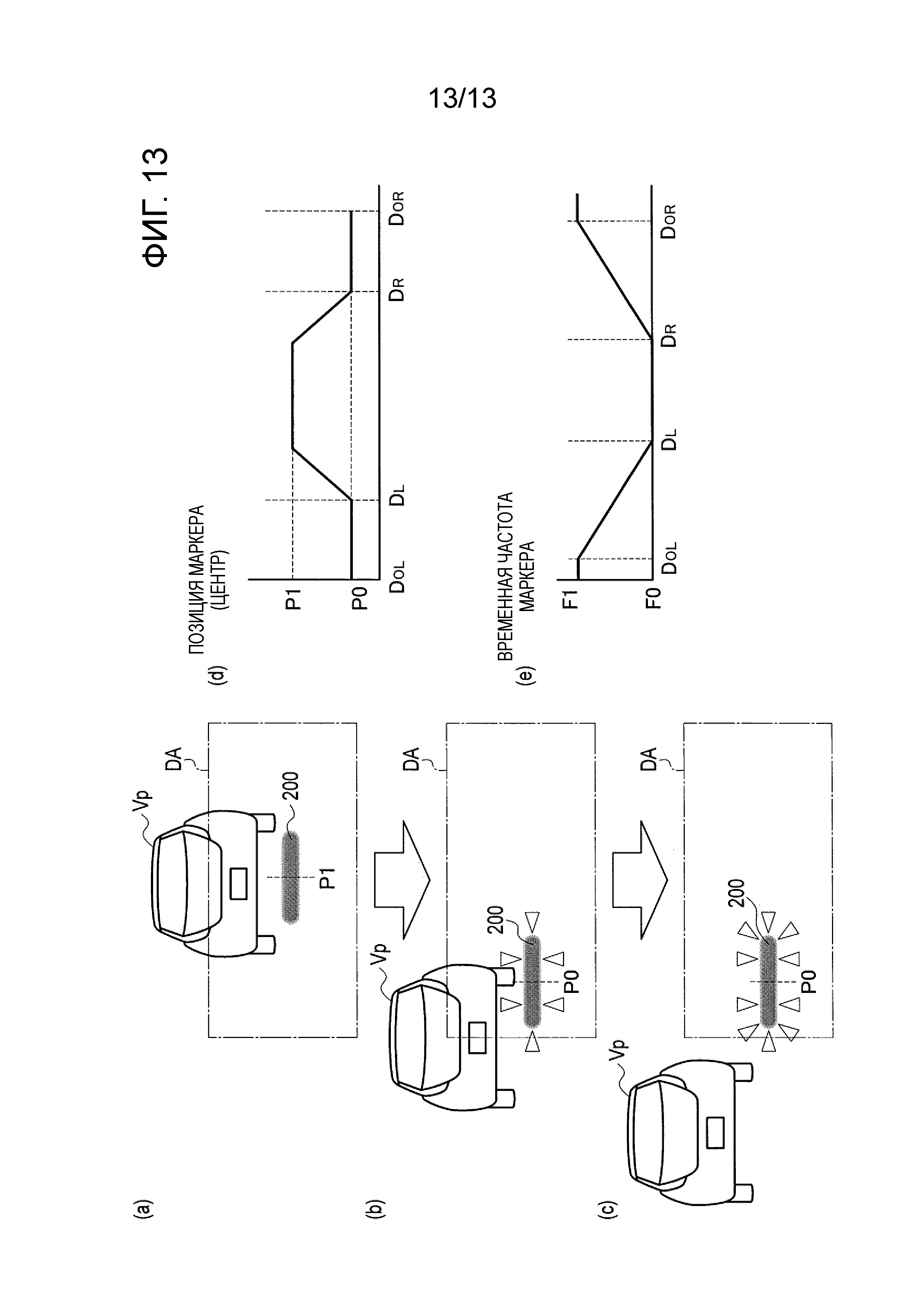
Фиг. 13A-13E являются видами, поясняющими пример 10 отображения изображения 200 маркера посредством устройства 100 отображения транспортного средства. Пример 10 отображения также является практически идентичным примеру 5 отображения, но отличается от примера 5 отображения тем, что временная частота изображения 200 маркера изменяется.
[0132] Фиг. 13A-13D соответствуют фиг. 8A-8C и 8E, соответственно.
[0133] В частности, устройство 100 отображения транспортного средства изменяет временную частоту изображения 200 маркера по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне DOL бокового края DL области DA отображения, увеличивается. Более конкретно, устройство 100 отображения транспортного средства увеличивает временную частоту (F0, F1) изображения 200 маркера по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне DOL бокового края DL области DA отображения, увеличивается.
[0134] Изображение 200 маркера в силу этого отображается таким образом, что оно мигает с меньшим интервалами по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне DOL бокового края DL области DA отображения, увеличивается.
[0135] Фиг. 13E иллюстрирует взаимосвязь между позицией движущегося впереди транспортного средства Vp и временной частотой (F0, F1) изображения 200 маркера. Как проиллюстрировано на фиг. 13E, временная частота изображения 200 маркера становится более высокой по мере того, как фрагмент движущегося впереди транспортного средства Vp за пределами бокового края DL или бокового края DR увеличивается.
[0136] Следующие операции и преимущества могут получаться из вышеуказанного варианта осуществления.
[0137] Когда движущееся впереди транспортное средство Vp расположено на внешней стороне (за пределами DOL или за пределами DOR, то же применимо далее) одного из боковых краев области DA отображения по ширине транспортного средства (бокового края DL или бокового края DR, то же применимо далее), устройство 100 отображения транспортного средства продолжает отображать изображение 200 маркера в периферийном фрагменте бокового края по ширине транспортного средства, на внешней стороне которого расположено движущееся впереди транспортное средство Vp.
[0138] Поскольку изображение 200 маркера продолжает отображаться, когда движущееся впереди транспортное средство Vp расположено на внешней стороне области DA отображения при условии, что движущееся впереди транспортное средство Vp захватывается для слежения посредством устройства для адаптивного автоматического регулирования скорости, водитель может легко распознавать то, что выполняется адаптивное автоматическое регулирование скорости.
[0139] В частности, водитель может немедленно распознавать то, выполняется или нет адаптивное автоматическое регулирование скорости непрерывно (управление потеряно или нет), из изображения 200 маркера, отображаемого в области DA отображения. Соответственно, устройство 100 отображения транспортного средства может предоставлять более комфортное окружение вождения, без сбивания с толку водителя без необходимости.
[0140] В варианте осуществления, когда движущееся впереди транспортное средство Vp частично расположено на внешней стороне бокового края области DA отображения по ширине транспортного средства, ширина изображения 200 маркера может уменьшаться в зависимости от ширины фрагмента движущегося впереди транспортного средства Vp, расположенного в области DA отображения (см. пример 1 отображения). Поскольку ширина изображения 200 маркера уменьшается, водитель может легко распознавать то, что адаптивное автоматическое регулирование скорости выполняется непрерывно, когда движущееся впереди транспортное средство Vp перемещается за пределы области DA отображения.
[0141] В варианте осуществления, когда все движущееся впереди транспортное средство Vp расположено на внешней стороне бокового края области DA отображения по ширине транспортного средства, значок 300, указывающий движущееся впереди транспортное средство Vp, может отображаться рядом с изображением 200 маркера (см. пример 2 отображения). Поскольку значок 300, указывающий движущееся впереди транспортное средство Vp, отображается, водитель может более легко распознавать то, что адаптивное автоматическое регулирование скорости выполняется непрерывно, когда движущееся впереди транспортное средство Vp не находится в области DA отображения.
[0142] В варианте осуществления, изображение 200 маркера может перемещаться к стороне движущегося впереди транспортного средства Vp по мере того, как фрагмент движущегося впереди транспортного средства Vp, расположенный на внешней стороне бокового края области DA отображения по ширине транспортного средства, увеличивается (см. пример 3 отображения). Кроме того, размер изображения 200 маркера также может уменьшаться. Поскольку изображение 200 маркера перемещается к стороне, водитель может легко распознавать то, что адаптивное автоматическое регулирование скорости выполняется непрерывно, когда движущееся впереди транспортное средство Vp перемещается за пределы области DA отображения.
[0143] В варианте осуществления, можно перемещать изображение 200 маркера, имеющее форму дуги вокруг предварительно определенной позиции (центр CT) в движущемся впереди транспортном средстве Vp, к стороне движущегося впереди транспортного средства Vp и уменьшать длину дуги изображения 200 маркера по мере того, как фрагмент движущегося впереди транспортного средства Vp на внешней стороне бокового края области DA отображения по ширине транспортного средства увеличивается (см. пример 4 отображения). Поскольку изображение 200 маркера перемещается к стороне, и его размер изменяется, водитель может более легко распознавать то, что адаптивное автоматическое регулирование скорости выполняется непрерывно, когда движущееся впереди транспортное средство Vp перемещается за пределы области DA отображения.
[0144] Кроме того, в этом случае, длина дуги изображения 200 маркера может быть фиксированной, когда предварительно определенная позиция в движущемся впереди транспортном средстве Vp отстоит от бокового края области DA отображения по ширине транспортного средства на предварительно определенное расстояние (расстояние X) или больше. Поскольку изображение 200 маркера продолжает отображаться с фиксированным размером, когда движущееся впереди транспортное средство Vp значительно отдаляется от области DA отображения, водитель может легко распознавать то, что адаптивное автоматическое регулирование скорости выполняется непрерывно.
[0145] В варианте осуществления, изображение 200 маркера с предварительно определенной шириной продолжает отображаться, когда движущееся впереди транспортное средство Vp расположено на внешней стороне бокового края области DA отображения по ширине транспортного средства (см. пример 5 отображения). Соответственно, водитель может легко распознавать то, что адаптивное автоматическое регулирование скорости выполняется непрерывно. Кроме того, в этом случае, расстояние до движущегося впереди транспортного средства Vp (ширина движущегося впереди транспортного средства Vp в области DA отображения) представляет собой единственный фактор, который приводит к тому, что ширина изображения 200 маркера изменяется. Соответственно, водитель может легко понимать и принимать то, что ширина изображения 200 маркера ассоциирована только с расстоянием до движущегося впереди транспортного средства Vp.
[0146] В варианте осуществления, толщина изображения 200 маркера может уменьшаться по мере того, как фрагмент движущегося впереди транспортного средства Vp на внешней стороне бокового края области DA отображения по ширине транспортного средства увеличивается (см. примеры 6 и 8 отображения). Поскольку толщина изображения 200 маркера уменьшается, водитель может легко распознавать то, что адаптивное автоматическое регулирование скорости выполняется непрерывно, когда движущееся впереди транспортное средство Vp перемещается за пределы области DA отображения.
[0147] В варианте осуществления, цвет изображения 200 маркера изменяется по мере того, как фрагмент движущегося впереди транспортного средства Vp на внешней стороне бокового края области DA отображения по ширине транспортного средства увеличивается (см. примеры 7 и 8 отображения). Поскольку цвет изображения 200 маркера изменяется, водитель может легко распознавать то, что адаптивное автоматическое регулирование скорости выполняется непрерывно, когда движущееся впереди транспортное средство Vp перемещается за пределы области DA отображения.
[0148] В варианте осуществления, пространственная частота изображения 200 маркера может изменяться по мере того, как фрагмент движущегося впереди транспортного средства Vp на внешней стороне бокового края области DA отображения по ширине транспортного средства увеличивается (см. пример 9 отображения). Поскольку изображение 200 маркера в силу этого отображается таким образом, что оно постепенно становится более тусклым, водитель может легко распознавать то, что адаптивное автоматическое регулирование скорости выполняется непрерывно, когда движущееся впереди транспортное средство Vp перемещается за пределы области DA отображения.
[0149] В варианте осуществления, временная частота изображения 200 маркера может изменяться по мере того, как фрагмент движущегося впереди транспортного средства Vp на внешней стороне бокового края области DA отображения по ширине транспортного средства увеличивается (см. пример 10 отображения). Поскольку изображение 200 маркера в силу этого отображается таким образом, что оно мигает с постепенно увеличивающейся частотой, водитель может легко распознавать то, что адаптивное автоматическое регулирование скорости выполняется непрерывно, когда движущееся впереди транспортное средство Vp перемещается за пределы области DA отображения.
[0150] Другие варианты осуществления
Выше описывается контент настоящего изобретения согласно примерам. Тем не менее, настоящее изобретение не ограничено вышеприведенным описанием, и специалистам в данной области техники должно быть очевидным, что могут вноситься различные изменения и модификации.
[0151] Например, в вышеуказанном варианте осуществления, как проиллюстрировано на фиг. 2, устройство 100 отображения транспортного средства включает в себя детектор 110 движущихся впереди транспортных средств, модуль 120 определения, процессор 130 отображения и дисплей 140 HUD-изображений. Тем не менее, детектор 110 движущихся впереди транспортных средств и дисплей 140 HUD-изображений не являются неотъемлемыми в устройстве 100 отображения транспортного средства.
[0152] Детектор 110 движущихся впереди транспортных средств может предоставляться в качестве функции устройства для адаптивного автоматического регулирования скорости, и дисплей 140 HUD-изображений может использоваться для отображения других изображений.
[0153] Кроме того, хотя дисплей 140 HUD-изображений (дисплей на лобовом стекле), который отображает изображение, отражаемое посредством зеркала на ветровом стекле, в качестве виртуального изображения, описывается в вышеуказанном варианте осуществления в качестве примера, дисплей на лобовом стекле не ограничен этим типом.
[0154] Например, дисплей 140 HUD-изображений может представлять собой комбинированный дисплей на лобовом стекле, который использует прозрачную панель вместо отображения изображения на ветровом стекле FW, либо тип, который непосредственно отображает изображение на ветровом стекле FW. Другими словами, дисплей 140 HUD-изображений согласно настоящему изобретению должен только отображать информацию в форме наложения на объект, просматриваемый водителем через ветровое стекло FW, без необходимости для водителя смотреть вниз.
[0155] Хотя четырехколесный легковой автомобиль (включающий в себя SUV и минифургон), грузовик и автобус задаются в качестве примеров транспортного средства V в вышеуказанном варианте осуществления, устройство 100 отображения транспортного средства может применяться к трехколесному автомобилю и мотоциклу.
[0156] Хотя выше описаны варианты осуществления настоящего изобретения, не следует понимать, что описание и чертежи, составляющие часть этого раскрытия сущности, ограничивают настоящее изобретение. Из этого раскрытия сущности, различные альтернативные варианты осуществления, примеры и рабочие технологии должны становиться очевидными для специалистов в данной области техники.
Список позиционных обозначений
[0157] 100 - устройство отображения транспортного средства
110 - детектор движущихся впереди транспортных средств
111 - датчик обнаружения движущихся впереди транспортных средств
113 - детектор координат
115 - детектор размера
120 - модуль определения
121 - модуль вычисления разности позиции слева/справа
123 - модуль определения нахождения внутри/за пределами области
130 - процессор отображения
140 - дисплей HUD-изображений
200 - изображение маркера
300 - значок
DA - область отображения
FW - ветровое стекло
V - транспортное средство
Vp - движущееся впереди транспортное средство.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Терминал, базовая станция, способ передачи и способ приема
Устройство связи и способ связи
Терминал и способ передачи
Терминал и способ передачи

