Результат интеллектуальной деятельности: Ступня ноги для шагающего космического микроробота
Вид РИД
Изобретение
Изобретение относится к робототехнике, а именно к шагающим мобильным роботам, и предназначено для осуществления работ в экстремальных ситуациях, преимущественно в условиях открытого космоса и выполнения задач напланетных миссий.
Поскольку эксплуатация микроробота предполагается в сложных экстремальных условиях космоса, одним из важных необходимых свойств становится возможность адаптации ноги к поверхности перемещения для обеспечения надежного контакта с ней.
Известна конструкция ноги для шагающего робота, обеспечивающая адаптивность робота к местности со сложным рельефом (CN 204236613 [1]). Конструкция содержит шесть закрепленных на цилиндрической втулке кронштейнов, на нижней поверхности которых, обращенных к поверхности перемещения, установлены силовые цилиндры, заканчивающиеся подпружиненными элементами.
Недостатком известной конструкции является ее сложность и значительные массогабаритные характеристики, что ограничивает их применение для выполнения задач напланетных миссий.
Известна конструкция ноги для шагающего робота, обеспечивающая адаптивность робота к местности со сложным рельефом за счет изменения жесткости подошвы, контактирующей с поверхностью перемещения (JP 2013220491 [2]). Конструкция представляет собой жесткий кожух, внутри которого закреплен полый герметичный эластичный мешок, заполненный гранулированным материалом. Внутренний объем мешка соединен шлангом со средством регулирования давления воздуха внутри мешка. В момент контакта мешка с поверхностью перемещения давление воздуха внутри близко к атмосферному, поэтому сыпучий гранулированный материал «обтекает» неровности почвы, а эластичная оболочка мешка их повторяет. В момент совершения шага из оболочки удаляется воздух и гранулированный материал приобретает жесткость близкого к монолитному материала, что позволяет роботу оттолкнуться от поверхности перемещения.
Недостатком известной конструкции является ее сложность и значительные массогабаритные характеристики, что ограничивает их применение для выполнения задач напланетных миссий.
Известна конструкция ноги для шагающего человекоподобного робота, обеспечивающая адаптацию ступни робота к неровностям поверхности перемещения (CN 105523098 [3]). Проблема адаптации ступни робота к неровностям поверхности перемещения решается тем, ступня ноги робота выполняется переменной жесткости. Ступня содержит пятку и переднюю часть (подошву), выполненную из термопластичного полиуретанового эластомера, внутренний герметичный объем которых соединен штуцером с источником сжатого воздуха. Для обеспечения возможности сгибания ступни и ее возврата в исходное состояние, на ее поверхности, противоположной контактирующей с поверхностью перемещения, установлен шарнир с торсионными пружинами.
Недостатком известной конструкции является необходимость наличия источника сжатого воздуха и средств регулирования давления внутри ступни в зависимости от характеристик поверхности перемещения. Это обстоятельство ограничивает их применение для выполнения задач напланетных миссий.
Наиболее близким к заявляемому изобретению по своей технической сущности и достигаемому эффекту является шагающий робот, ступня которого выполнена с переменной жесткостью для обеспечения его устойчивости при перемещении по неровной поверхности (CN 105835986 [4]). Ступня представляет собой полый корпус из силикона, закрываемый крышкой. Внутри корпуса размещаются контактирующие с поверхностью перемещения герметичные мешочки, заполненные силикагелем и подключенные к источнику сжатого воздуха со средством регулирования давления воздуха внутри мешка. По контуру корпуса размещены датчики давления, связанные с системой управления роботом. В зависимости от полученного сигнала от датчика давления в момент контакта каждого мешка с поверхностью перемещения система управления изменяет давление воздуха внутри и изменяется жесткость каждого мешка. Для обеспечения возможности сгибания ступни и ее возврата в исходное состояние, на поверхности крышки, установлен шарнир, который восстанавливает форму ступни после ее контакта с поверхностью перемещения.
Недостатком известной конструкции ступни является необходимость наличия источника сжатого воздуха и средств регулирования давления внутри ступни в зависимости от характеристик поверхности перемещения. Это обстоятельство ограничивает их применение для выполнения задач напланетных миссий.
Заявляемая конструкция ступни для ноги шагающего космического микроробота направлена на упрощение конструкции средства, обеспечивающего адаптацию ступни к поверхности перемещения и надежный контакт ступни с поверхностью.
Указанный результат достигается тем, что ступня для ноги шагающего космического микроробота выполнена с переменной жесткостью. При этом она выполнена в виде гибкой пластины с размещенными на ней с промежутками между собой жесткими элементами так, что их суммарная площадь на единице площади поверхности пластины монотонно убывает от пятки к носку, а ступня соединена пяткой с ногой с помощью шарнира с одной степенью свободы.
Указанный результат достигается также тем, что жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку.
Указанный результат достигается также тем что жесткие элементы выполнены с разной площадью, убывающей от пятки к носку.
Указанный результат достигается также тем, что суммарная площадь жестких элементов на единице площади поверхности пластины монотонно убывает от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку.
Указанный результат достигается также тем, что жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку.
Указанный результат достигается также тем, что жесткие элементы выполнены с разной площадью, убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через пятки к носку. Отличительными признаками заявляемого устройства являются:
- ступня выполнена в виде гибкой пластины с размещенными на ней с промежутками между собой жесткими элементами;
- суммарная площадь жестких элементов на единице площади поверхности пластины монотонно убывает от пятки к носку;
- ступня соединена пяткой с ногой с помощью шарнира с одной степенью свободы;
- жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку;
- жесткие элементы выполнены с разной площадью, убывающей от пятки к носку;
- суммарная площадь жестких элементов на единице площади поверхности пластины монотонно убывает от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку;
- жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку;
- жесткие элементы выполнены с разной площадью, убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через пятки к носку.
Пластина выполнена гибкой, что обеспечивает адаптацию ступни к неровной поверхности перемещения и этим обеспечивает увеличение площади контакта между ступней и поверхностью перемещения. Размещение на пластине с промежутками между собой жестких элементов создает увеличивающуюся от пятки к носку адаптацию ступни к поверхности перемещения и позволяет уменьшать силу отрыва прижатой ступни от носка к пятке.
Размещение на пластине жестких элементов с промежутками между собой не влияет на адаптацию ступни к поверхности перемещения, но предотвращает ее скручивание, так как жесткие элементы выполняют роль грузиков и обеспечивают прижим ступни к поверхности перемещения.
Соединение ступни пяткой с ногой с помощью шарнира с одной степенью свободы и размещение жестких элементов на пластине так, что их суммарная площадь на единице площади поверхности пластины монотонно убывает от пятки к носку, необходимо для того, чтобы реализовать последовательный многократный цикл шага с обеспечением надежного контакта ступни с поверхностью и последовательного отрыва ступни от поверхности за счет ослабления сил сцепления.
Для того, чтобы обеспечить выполнение условия монотонного убывания от пятки к носку суммарной площади жестких элементов на единице площади поверхности пластины, можно использовать в частных случаях различные варианты реализации устройства. Можно жесткие элементы выполнять одинаковой площади, а промежутки между ними увеличивать от пятки к носку. Также можно выполнять жесткие элементы с разной площадью, убывающей от пятки к носку.
Кроме того, в частных случаях реализации целесообразно изменять жесткость ступни не только от пятки к носку, но и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку. Это обеспечит полный контакт ступни с поверхностью при условии неоднородностей поверхности по двум осям.
Возможны различные конструктивные решения для выполнения этого условия. Можно жесткие элементы выполнять одинаковой площади и изменять промежутки между ними по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку, а можно выполнять жесткие элементы с разной площадью, уменьшающейся по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку.
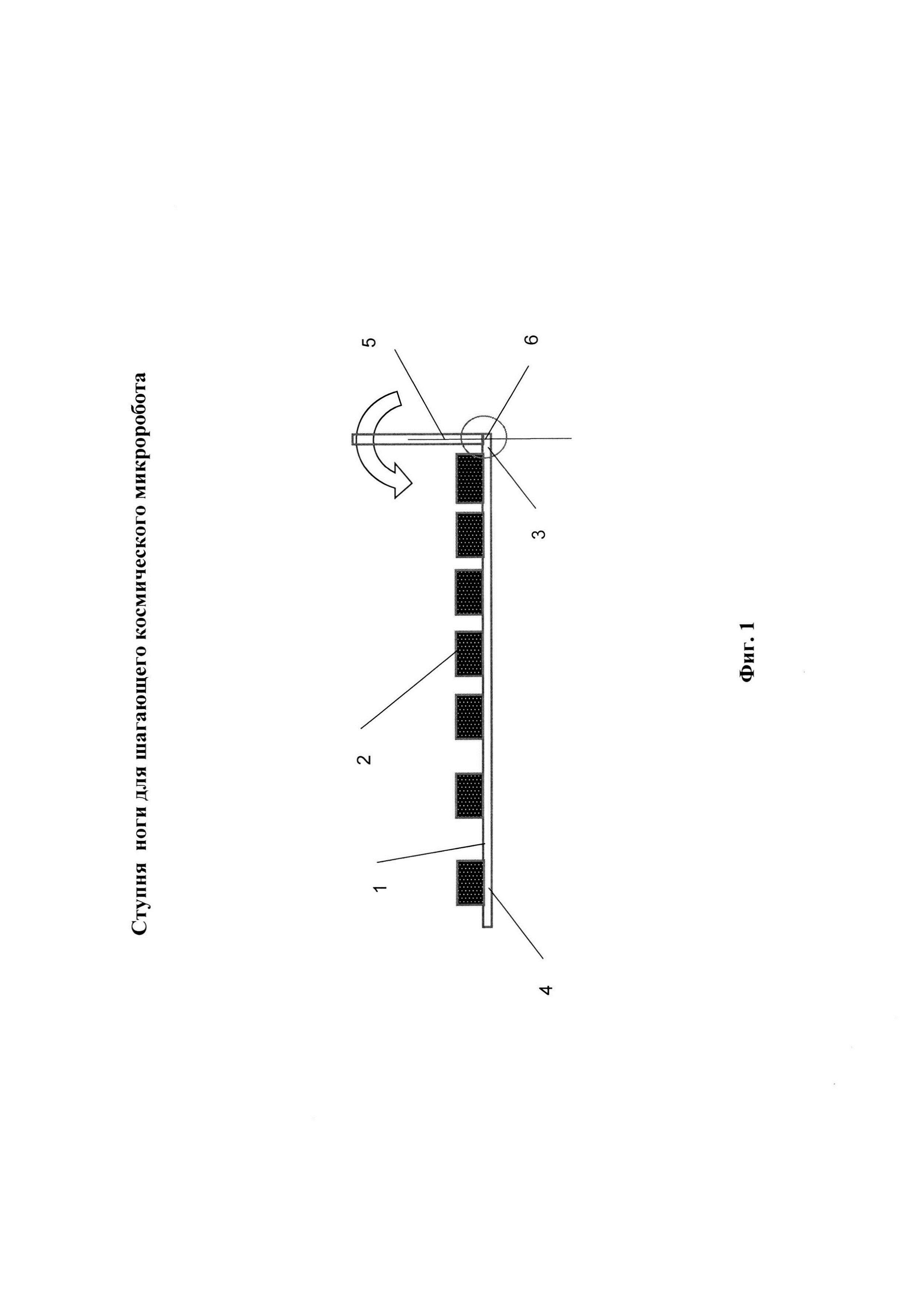
Сущность заявляемого устройства поясняется примерами реализации и чертежами. На фиг.1 показан схематично вид сбоку на ступню, реализованную в наиболее общем виде. На фиг.2 показан схематично вид сверху на ступню. На фиг.3 представлены варианты реализации ступни (вид сверху), когда жесткие элементы выполнены с разной площадью, убывающей по направлению к периферии от оси симметрии, проходящей через пятки к носку. На фиг.4 схематично показана адаптация ступни к поверхности перемещения.
Ступня в самом общем случае представляет собой гибкую пластину 1 на которой размещены с промежутками между собой жесткие элементы 2 так, что их суммарная площадь на единице площади поверхности пластины монотонно убывает от пятки 3 к носку 4. Ступня соединена пяткой с ногой 5 с помощью шарнира 6 с одной степенью свободы. В качестве материала пластины может использоваться полиимид, полиэфирамид, полисульфон или подобный полимер, формируемый из раствора с последующей полимеризацией. В качестве материала жестких элементов может выступать монокристаллический кремний, поликристаллический кремний, поликор, металлы.
Устройство функционирует следующим образом: вначале ступня с ногой, представляющая собой гибкую пластину 1, на которой размещены с промежутками между собой жесткие элементы 2, находится в пространстве и никакого взаимодействия с поверхностью 7 не испытывает. Затем связанная с ногой ступня с помощью шарнира 6 с одной степенью свободы совершает перемещение в направлении, параллельном поверхности, и касается ее в области пятки 3 с образованием узкого зазора - щели. Затем за счет переменной жесткости, обеспечиваемой размещением жестких элементов 2, зазор последовательно уменьшается от носка 4 к пятке 3 с образованием надежного контакта стопы с поверхностью, при этом наличие жестких элементов 2 не дает самопроизвольно деформироваться стопе. После перемещения микроробота на величину шага стопа отрывается от поверхности в области пятки с образованием зазора. При этом за счет тангенциального направления отрыва сила сцепления существенно меньше по сравнению с нормальной. Величина зазора возрастает от пятки к носку, и ступня отрывается от поверхности. Затем цикл повторяется.
Устройство и способ избавления от неустойчивостей оптического разряда
Шагающий инсектоморфный мобильный микроробот
Устройство управления манипулятором робота
Способ изготовления свч-гибридной интегральной микросхемы космического назначения с многоуровневой коммутацией
Свч коммутационная плата из высокоомного кремния на металлическом основании
Многослойная коммутационная плата свч-гибридной интегральной микросхемы космического назначения и способ её получения (варианты)
Микросистема терморегулирования малых космических аппаратов
Способ мониторинга воздействия невесомости на двигательную активность находящегося на борту космического аппарата оператора
Способ определения воздействия невесомости на двигательную активность находящегося на борту космического аппарата оператора
Ползающий космический микроробот-инспектор
Способ формирования объемных элементов в кремнии для устройств микросистемной техники и производственная линия для осуществления способа

