Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Уровень техники
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к устройству управления движением транспортного средства.
2. Описание предшествующего уровня техники
[0002] Предлагается устройство, которое определяет то, переходит или нет водитель в анормальное состояние, в котором водитель теряет способность к вождению транспортного средства (например, в состояние вождения при сонливости, в состояние прекращения психических и физических функций и т.п.) и замедляет транспортное средство, когда выполняется такое определение (например, см. публикацию заявки на патент Японии номер 2009-73462 (JP 2009-73462 А)). Следует отметить, что в дальнейшем "анормальное состояние, в котором водитель теряет способность к вождению транспортного средства" также называется просто "анормальным состоянием неспособности к вождению", а "определение относительно того, находится или нет водитель в анормальном состоянии неспособности к вождению" также называется просто "определением анормальности водителя".
Сущность изобретения
[0003] Согласно обычному устройству, в случае если определяется то, что водитель переходит в анормальное состояние неспособности к вождению, транспортное средство продолжает замедляться, и скорость транспортного средства уменьшается также в области с плохой видимостью вследствие формы дороги, к примеру, в точке сразу после того, как транспортное средство проезжает по искривленной дороге и через перегиб. Как результат, водитель в транспортном средстве позади, возможно, должен резко тормозить, чтобы предотвращать столкновение при распознавании транспортного средства.
[0004] Изобретение предоставляет устройство управления движением транспортного средства, которое уменьшает скорость транспортного средства, когда определяется то, что водитель переходит в анормальное состояние неспособности к вождению, и которое не уменьшает скорость транспортного средства чрезмерно, когда транспортное средство движется в области с плохой видимостью вследствие формы дороги.
[0005] Аспект изобретения предоставляет устройство управления движением транспортного средства. Устройство управления движением транспортного средства согласно аспекту включает в себя средство определения анормальности и средство прекращения движения. Средство определения анормальности выполнено с возможностью определять то, находится или нет водитель транспортного средства в анормальном состоянии, в котором водитель теряет способность к вождению транспортного средства. Средство прекращения движения выполнено с возможностью останавливать транспортное средство в момент времени определения анормальности и далее, причем момент времени определения анормальности представляет собой момент времени, в который определяется то, что водитель находится в анормальном состоянии, и управлять скоростью транспортного средства транспортного средства таким образом, что скорость транспортного средства не становится ниже нижней предельной скорости транспортного средства в период от момента времени определения анормальности до момента времени, в который транспортное средство остановлено. Нижняя предельная скорость транспортного средства задается в соответствии формой дороги, оказывающей влияние на время, в которое водитель другого транспортного средства, движущегося позади транспортного средства, визуально распознает транспортное средство, среди форм дороги, по которой движется транспортное средство.
[0006] Согласно вышеприведенному, скорость транспортного средства для замедляемого целевого транспортного средства может управляться таким образом, что скорость транспортного средства для замедляемого целевого транспортного средства не уменьшается чрезмерно (не становится ниже нижней предельной скорости транспортного средства) в случае, если замедляемое целевое транспортное средство движется на дороге с плохой видимостью (такой дороге, на которой время, когда водитель транспортного средства позади замедляемого целевого транспортного средства визуально распознает замедляемое целевое транспортное средство, задерживается по сравнению со временем на прямой и ровной дороге). Как результат этого, может уменьшаться вероятность того, что водитель транспортного средства позади, который распознает замедляемое целевое транспортное средство, должен резко тормозить транспортное средство позади.
[0007] В аспекте изобретения, средство прекращения движения может быть выполнено с возможностью получать информацию относительно формы дороги и может быть выполнено с возможностью задавать нижнюю предельную скорость транспортного средства на основе информации относительно формы дороги.
[0008] В аспекте изобретения, средство прекращения движения может быть выполнено с возможностью получать информацию относительно радиуса кривизны дороги в точке впереди точки, в которой транспортное средство движется в текущий момент времени, в качестве информации относительно формы дороги, и может быть выполнено с возможностью задавать нижнюю предельную скорость транспортного средства равной большему значению по мере того как, уменьшается радиус кривизны, указываемый посредством информации относительно радиуса кривизны.
[0009] Согласно вышеприведенному, радиус кривизны дороги в точке впереди замедляемого целевого транспортного средства может получаться до того, как транспортное средство достигает точки впереди. Таким образом, скорость транспортного средства для замедляемого целевого транспортного средства может управляться заранее таким образом, что скорость транспортного средства для замедляемого целевого транспортного средства не опускается ниже нижней предельной скорости транспортного средства. Кроме того, существует такая тенденция, что время, когда водитель транспортного средства позади распознает замедляемое целевое транспортное средство, задерживается по мере того, как радиус кривизны уменьшается. Таким образом, нижняя предельная скорость транспортного средства задается равной большему значению по мере того, как радиус кривизны уменьшается. Как результат этого, дополнительно может уменьшаться вероятность того, что водитель транспортного средства позади, который распознает замедляемое целевое транспортное средство, должен резко тормозить транспортное средство позади.
[0010] В аспекте изобретения, средство прекращения движения может быть выполнено с возможностью получать радиус кривизны или кривизну, по меньшей мере, одного участка дороги в качестве информации относительно радиуса кривизны дороги из картографической базы данных и может быть выполнено с возможностью задавать нижнюю предельную скорость транспортного средства для каждого участка на основе радиуса кривизны или кривизны каждого участка. Средство прекращения движения может быть выполнено с возможностью определять момент времени достижения конкретной точки. Момент времени достижения конкретной точки может определяться таким образом, что скорость транспортного средства транспортного средства в период от момента времени достижения конкретной точки до момента времени, в который транспортное средство остановлено, не становится ниже нижней предельной скорости транспортного средства, причем момент времени достижения конкретной точки представляет собой момент, в который транспортное средство достигает конкретной точки впереди позиции в момент времени определения анормальности, причем нижняя предельная скорость транспортного средства задается для каждого участка, когда транспортное средство достигает момента времени достижения конкретной точки, при поддержании скорости транспортного средства в момент времени определения анормальности, и транспортное средство замедляется с постоянным замедлением от момента времени достижения конкретной точки. Средство прекращения движения может быть выполнено с возможностью заставлять транспортное средство двигаться со скоростью транспортного средства в момент времени определения анормальности, от момента времени определения анормальности до момента времени достижения конкретной точки, и может быть выполнено с возможностью замедлять транспортное средство с постоянным замедлением от момента времени достижения конкретной точки.
[0011] Когда картографическая база данных используется, как описано выше, можно оценивать заранее дорогу (участок дороги) с помощью того, по какому радиусу кривизны движется замедляемое целевое транспортное средство (другими словами, как изменяется нижняя предельная скорость транспортного средства) до тех пор, пока замедляемое целевое транспортное средство не остановится. Соответственно, позиция, в которой начинается замедление (конкретная точка), может определяться до того начала замедления в случае, если замедляемое целевое транспортное средство замедляется с постоянным замедлением.
[0012] Кроме того, согласно этому аспекту, замедляемое целевое транспортное средство замедляется в то время, когда поддерживается постоянное замедление. Такое замедление с поддержанием постоянного замедления отличается от замедления во время автоматического управления скоростью транспортного средства в нормальном ACC (описывается ниже) и т.п. Соответственно, пассажиры, в том числе водитель замедляемого целевого транспортного средства, могут испытывать чувство дискомфорта. Таким образом, если водитель не находится в анормальном состоянии неспособности к вождению, водитель и пассажир, если пассажир присутствует, могут распознавать, что транспортное средство принудительно замедляется. Помимо этого, поскольку замедление не колеблется, может уменьшаться вероятность того, что водитель другого транспортного средства, движущегося около замедляемого целевого транспортного средства, должен выполнять специальную операцию вождения, такую как резкое торможение или резкое руление. Следует отметить, что этот эффект представляет собой эффект, прилагаемый аналогичным образом в другом аспекте изобретения, в котором замедляемое целевое транспортное средство замедляется при поддержании постоянного замедления.
[0013] В аспекте изобретения, средство прекращения движения может быть выполнено с возможностью получать радиус кривизны или кривизну, по меньшей мере, одного участка дороги в качестве информации относительно радиуса кривизны дороги из картографической базы данных и может быть выполнено с возможностью задавать нижнюю предельную скорость транспортного средства для каждого участка на основе радиуса кривизны или кривизны каждого участка. Средство прекращения движения может быть выполнено с возможностью определять постоянное замедление таким образом, что скорость транспортного средства транспортного средства в период от момента времени определения анормальности до момента времени, в который транспортное средство остановлено, не становится ниже нижней предельной скорости транспортного средства, задаваемой для каждого участка, когда транспортное средство замедляется с постоянным замедлением от момента времени определения анормальности, и может быть выполнено с возможностью замедлять транспортное средство с постоянным замедлением от момента времени определения анормальности.
[0014] Как описано выше, посредством использования картографической базы данных, можно оценивать заранее, как нижняя предельная скорость транспортного средства изменяется до тех пор, пока замедляемое целевое транспортное средство не остановится. Соответственно, перед началом замедления, может определяться, то с каким постоянным замедлением замедляемое целевое транспортное средство должно замедляться от момента времени определения анормальности, чтобы не допускать становление скорости транспортного средства для замедляемого целевого транспортного средства ниже нижней предельной скорости транспортного средства, которая задается в расчете на участок дороги до момента времени, в который транспортное средство останавливается.
[0015] В аспекте изобретения, средство прекращения движения может быть выполнено с возможностью получать радиус кривизны или кривизну, по меньшей мере, одного участка в качестве информации относительно радиуса кривизны дороги из картографической базы данных. Средство прекращения движения может быть выполнено с возможностью задавать нижнюю предельную скорость транспортного средства для каждого участка на основе радиуса кривизны или кривизны каждого участка. Средство прекращения движения может быть выполнено с возможностью замедлять транспортное средство с постоянным замедлением в момент времени определения анормальности и далее и временно прерывать замедление транспортного средства и поддерживать скорость транспортного средства транспортного средства в период, в который прогнозируется то, что скорость транспортного средства транспортного средства становится ниже нижней предельной скорости транспортного средства, задаваемой для каждого участка, причем период находится в период от момента времени определения анормальности до момента времени, в который транспортное средство остановлено.
[0016] Согласно вышеприведенному, можно не допускать опускания скорости транспортного средства для замедляемого целевого транспортного средства ниже нижней предельной скорости транспортного средства, и замедление замедляемого целевого транспортного средства может продолжаться, когда скорость транспортного средства для замедляемого целевого транспортного средства выше нижней предельной скорости транспортного средства. Соответственно, скорость транспортного средства для замедляемого целевого транспортного средства может уменьшаться в максимально возможной степени в то время, когда не допускается падение скорости транспортного средства для замедляемого целевого транспортного средства ниже нижней предельной скорости транспортного средства.
[0017] В аспекте изобретения, устройство управления движением транспортного средства согласно аспекту дополнительно может включать в себя устройство камеры, которое получает данные изображения посредством захвата изображения впереди транспортного средства. Средство прекращения движения может быть выполнено с возможностью получать радиус кривизны или кривизну дороги в конкретной точке впереди позиции транспортного средства в текущий момент времени на указанное расстояние в качестве информации относительно радиуса кривизны дороги на основе данных изображения и может быть выполнено с возможностью задавать нижнюю предельную скорость транспортного средства на основе радиуса кривизны или кривизны в конкретной точке. В случае если прогнозируется то, что скорость транспортного средства в то время, когда транспортное средство достигает конкретной точки, становится ниже нижней предельной скорости транспортного средства, когда транспортное средство замедляется с постоянным замедлением от момента времени определения анормальности и далее, средство прекращения движения может быть выполнено с возможностью заставлять транспортное средство двигаться с постоянной скоростью, с тем чтобы поддерживать скорость транспортного средства транспортного средства в момент времени, когда скорость транспортного средства прогнозируется, в случае если скорость транспортного средства транспортного средства в момент времени, когда скорость транспортного средства прогнозируется, равна или выше нижней предельной скорости транспортного средства в конкретной точке, и может быть выполнено с возможностью ускорять транспортное средство таким образом, что скорость транспортного средства транспортного средства становится равной или превышающей нижнюю предельную скорость транспортного средства в конкретной точке до того, как транспортное средство достигает конкретной точки в случае, если скорость транспортного средства транспортного средства в момент времени, когда скорость транспортного средства прогнозируется, ниже нижней предельной скорости транспортного средства в конкретной точке.
[0018] Согласно вышеприведенному, например, даже когда информация картографической базы данных не может использоваться, даже когда информация картографической базы данных является старой информацией и т.п., скорость транспортного средства для замедляемого целевого транспортного средства может постепенно уменьшаться в то время, когда не допускается значительное падение скорости транспортного средства для замедляемого целевого транспортного средства ниже нижней предельной скорости транспортного средства.
[0019] В аспекте изобретения, средство прекращения движения может быть выполнено с возможностью получать информацию относительно радиуса кривизны дороги в точке, в которой транспортное средство движется в текущий момент времени, в качестве информации относительно формы дороги, и может быть выполнено с возможностью задавать нижнюю предельную скорость транспортного средства равной большему значению по мере того как, уменьшается радиус кривизны, указываемый посредством информации относительно радиуса кривизны.
[0020] Согласно вышеприведенному, нижняя предельная скорость транспортного средства в текущий момент времени задается равной большему значению по мере того, как уменьшается радиус кривизны дороги в точке, в которой движется в текущий момент времени замедляемое целевое транспортное средство. Соответственно, скорость транспортного средства для замедляемого целевого транспортного средства может управляться таким образом, что скорость транспортного средства для замедляемого целевого транспортного средства в текущий момент времени не опускается ниже нижней предельной скорости транспортного средства дороги, по которой замедляемое целевое транспортное средство движется в текущий момент времени.
[0021] В аспекте изобретения, устройство управления движением транспортного средства согласно аспекту дополнительно может включать в себя устройство камеры, которое получает данные изображения посредством захвата изображения впереди транспортного средства. Средство прекращения движения может быть выполнено с возможностью получать радиус кривизны или кривизну дороги в точке, в которой транспортное средство движется в текущий момент времени, в качестве информации относительно радиуса кривизны дороги на основе данных изображения. Средство прекращения движения может быть выполнено с возможностью замедлять транспортное средство, когда скорость транспортного средства транспортного средства в текущий момент времени выше нижней предельной скорости транспортного средства в точке, в которой транспортное средство движется в текущий момент времени, и средство прекращения движения может быть выполнено с возможностью ускорять транспортное средство таким образом, что скорость транспортного средства транспортного средства становится равной или превышающей нижнюю предельную скорость транспортного средства, когда скорость транспортного средства транспортного средства в текущий момент времени ниже нижней предельной скорости транспортного средства в точке, в которой транспортное средство движется в текущий момент времени.
[0022] Согласно вышеприведенному, скорость транспортного средства для замедляемого целевого транспортного средства в текущий момент времени может управляться на основе данных изображения, полученных посредством устройства камеры, таким образом, что скорость транспортного средства для замедляемого целевого транспортного средства не опускается ниже нижней предельной скорости транспортного средства дороги, по которой замедляемое целевое транспортное средство движется в текущий момент времени.
[0023] В аспекте изобретения, средство прекращения движения может быть выполнено с возможностью получать информацию относительно величины изменения уклона дороги в качестве информации относительно формы дороги и задавать нижнюю предельную скорость транспортного средства равной большему значению по мере того, как увеличивается величина изменения уклона в точке перегиба, причем точка перегиба указывается посредством информации относительно величины изменения уклона.
[0024] В случае если замедляемое целевое транспортное средство движется посредством проезда через перегиб, в котором уклон дороги изменяется с подъема на спуск, время, когда водитель транспортного средства позади распознает замедляемое целевое транспортное средство, задерживается больше по мере того, как увеличивается величина (dI) изменения уклона до и после перегиба. Соответственно, когда нижняя предельная скорость транспортного средства задается на основе величины изменения уклона, как указано в вышеприведенном аспекте, может уменьшаться вероятность того, что водитель транспортного средства позади, который распознает замедляемое целевое транспортное средство, движущееся посредством проезда через перегиб, должен резко тормозить транспортное средство позади.
[0025] В аспекте изобретения, средство прекращения движения может быть выполнено с возможностью получать информацию относительно величины изменения уклона из картографической базы данных и может быть выполнено с возможностью задавать нижнюю предельную скорость транспортного средства равной большему значению по мере того, как увеличивается величина изменения уклона.
[0026] В аспекте изобретения, средство прекращения движения может быть выполнено с возможностью получать проезжаемое расстояние, на которое транспортное средство движется после проезда через точку перегиба, и может быть выполнено с возможностью задавать нижнюю предельную скорость транспортного средства равной большему значению по мере того, как уменьшается проезжаемое расстояние.
[0027] Согласно вышеприведенному, регулирование скорости замедляемого целевого транспортного средства может выполняться таким образом, что скорость транспортного средства для замедляемого целевого транспортного средства для случая, в котором замедляемое целевое транспортное средство движется в области около точки перегиба, становится выше скорости транспортного средства для замедляемого целевого транспортного средства для случая, в котором замедляемое целевое транспортное средство движется в области, дальней от точки перегиба. Таким образом, дополнительно может уменьшаться вероятность того, что водитель транспортного средства позади, который распознает замедляемое целевое транспортное средство, должен резко тормозить транспортное средство позади.
[0028] В аспекте изобретения, средство определения анормальности может быть выполнено с возможностью определять то, что водитель транспортного средства находится в анормальном состоянии, когда водитель транспортного средства не выполняет предварительно определенную операцию в течение большего времени, чем предварительно определенное время.
[0029] В аспекте изобретения, средство определения анормальности может быть выполнено с возможностью определять то, что водитель транспортного средства находится в анормальном состоянии, когда водитель транспортного средства не выполняет операцию вождения в течение большего времени, чем предварительно определенное время.
[0030] В аспекте изобретения, устройство управления движением транспортного средства согласно аспекту дополнительно может включать в себя кнопку подтверждения, установленную на транспортном средстве. Средство определения анормальности может быть выполнено с возможностью выполнять уведомление относительно инструктирования водителю транспортного средства нажимать кнопку подтверждения и может быть выполнено с возможностью определять то, что водитель транспортного средства находится в анормальном состоянии, когда водитель транспортного средства не нажимает кнопку подтверждения в течение предварительно определенного времени после того, как выполнено уведомление.
[0031] В вышеприведенном описании, чтобы упростить понимание изобретения, компоненты изобретения, которые соответствуют компонентам вариантов осуществления, которые описываются ниже, дополняются с названием и/или ссылкой с номером, используемой в варианте осуществления, в круглой скобке. Тем не менее, каждый из компонентов изобретения не ограничен компонентом вариантов осуществления, заданным посредством названия и/или ссылки с номером. Другие цели, другие признаки и прилагаемые преимущества изобретения должны легко пониматься из описания вариантов осуществления изобретения со ссылкой на нижеприведенные чертежи.
Краткое описание чертежей
[0032] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является схемой принципиальной конфигурации устройства управления движением транспортного средства (первого устройства) согласно первому варианту осуществления изобретения;
Фиг. 2A является временной диаграммой для пояснения приведения в действие первого устройства;
Фиг. 2B является временной диаграммой для пояснения приведения в действие первого устройства;
Фиг. 3 является блок-схемой последовательности операций способа для процедуры, которая выполняется посредством CPU первого устройства;
Фиг. 4 является блок-схемой последовательности операций способа для процедуры, которая выполняется посредством CPU первого устройства;
Фиг. 5 является блок-схемой последовательности операций способа для процедуры, которая выполняется посредством CPU первого устройства;
Фиг. 6 является временной диаграммой для пояснения приведения в действие устройства управления движением транспортного средства (второго устройства) согласно второму варианту осуществления изобретения;
Фиг. 7 является блок-схемой последовательности операций способа для процедуры, которая выполняется посредством CPU второго устройства;
Фиг. 8 является временной диаграммой для пояснения приведения в действие устройства управления движением транспортного средства (третьего устройства) согласно третьему варианту осуществления изобретения;
Фиг. 9 является блок-схемой последовательности операций способа для процедуры, которая выполняется посредством CPU третьего устройства;
Фиг. 10A является временной диаграммой для пояснения приведения в действие устройства управления движением транспортного средства (четвертого устройства) согласно четвертому варианту осуществления изобретения;
Фиг. 10B является временной диаграммой для пояснения приведения в действие устройства управления движением транспортного средства (четвертого устройства) согласно четвертому варианту осуществления изобретения;
Фиг. 10C является временной диаграммой для пояснения приведения в действие устройства управления движением транспортного средства (четвертого устройства) согласно четвертому варианту осуществления изобретения;
Фиг. 10D является временной диаграммой для пояснения приведения в действие устройства управления движением транспортного средства (четвертого устройства) согласно четвертому варианту осуществления изобретения;
Фиг. 11A является временной диаграммой для пояснения приведения в действие устройства управления движением транспортного средства (четвертого устройства) согласно четвертому варианту осуществления изобретения;
Фиг. 11B является временной диаграммой для пояснения приведения в действие устройства управления движением транспортного средства (четвертого устройства) согласно четвертому варианту осуществления изобретения;
Фиг. 11C является временной диаграммой для пояснения приведения в действие устройства управления движением транспортного средства (четвертого устройства) согласно четвертому варианту осуществления изобретения;
Фиг. 11D является временной диаграммой для пояснения приведения в действие устройства управления движением транспортного средства (четвертого устройства) согласно четвертому варианту осуществления изобретения;
Фиг. 12 является блок-схемой последовательности операций способа для процедуры, которая выполняется посредством CPU четвертого устройства;
Фиг. 13 является блок-схемой последовательности операций способа для процедуры, которая выполняется посредством CPU устройства управления движением транспортного средства (пятого устройства) согласно пятому варианту осуществления изобретения;
Фиг. 14 является блок-схемой последовательности операций способа для процедуры, которая выполняется посредством CPU устройства управления движением транспортного средства согласно модифицированному примеру пятого варианта осуществления изобретения;
Фиг. 15 является блок-схемой последовательности операций способа для процедуры, которая выполняется посредством CPU устройства управления движением транспортного средства (шестого устройства) согласно шестому варианту осуществления изобретения; и
Фиг. 16 является блок-схемой последовательности операций способа для процедуры, которая выполняется посредством CPU устройства управления движением транспортного средства (седьмого устройства) согласно седьмому варианту осуществления изобретения.
Подробное описание вариантов осуществления
[0033] Далее приводится описание устройства управления движением транспортного средства (системы помощи при вождении) согласно каждому варианту осуществления изобретения со ссылкой на чертежи.
[0034] Первый вариант осуществления
Как показано на фиг. 1, устройство управления движением транспортного средства согласно первому варианту осуществления изобретения (в дальнейшем также может называться "первым устройством") применяется к транспортному средству (в дальнейшем также может называться "рассматриваемым транспортным средством" для различения от других транспортных средств) и включает в себя ECU 10 помощи при вождении, навигационный ECU 20, ECU 30 двигателя, ECU 40 тормоза, ECU 50 электрического парковочного тормоза, ECU 60 рулевого управления, ECU 70 приборной панели и ECU 80 выдачи аварийных сигналов.
[0035] Эти ECU представляют собой электрический модуль управления, который включает в себя микрокомпьютер в качестве основного компонента, взаимно соединены таким образом, что они имеют возможность передавать и принимать информацию через контроллерную сеть (CAN), которая не показана. В этом подробном описании, микрокомпьютер включает в себя CPU, ROM, RAM, энергонезависимое запоминающее устройство, интерфейс и т.п. CPU выполняет инструкции (программы, процедуры), сохраненные в ROM, чтобы реализовывать различные функции. Некоторые или все эти ECU могут быть интегрированы в один ECU.
[0036] ECU 10 помощи при вождении соединяется с датчиками (включающими в себя переключатели), которые упоминаются ниже, и принимает сигналы определения или выходные сигналы этих датчиков. Следует отметить, что каждый из датчиков может соединяться с любым из ECU, за исключением ECU 10 помощи при вождении. В таком случае, ECU 10 помощи при вождении принимает сигнал определения или выходной сигнал датчика из ECU, с которым соединяется датчик, через CAN.
[0037] Датчик 11 рабочей величины нажатия педали акселератора определяет рабочую величину (степень открытия акселератора) нажатия педали 11a акселератора рассматриваемого транспортного средства и выводит сигнал, указывающий рабочую величину AP нажатия педали акселератора. Датчик 12 рабочей величины нажатия педали тормоза определяет рабочую величину нажатия педали 12a тормоза рассматриваемого транспортного средства и выводит сигнал, указывающий рабочую величину BP нажатия педали тормоза. Переключатель 13 лампы стоп-сигнала выводит сигнал с низким уровнем, когда педаль 12a тормоза не нажимается (не управляется) и выводит сигнал с высоким уровнем, когда педаль 12a тормоза нажимается (управляется).
[0038] Датчик 14 угла поворота при рулении определяет угол поворота при рулении рассматриваемого транспортного средства и выводит сигнал, указывающий угол θ поворота при рулении. Датчик 15 крутящего момента поворота при рулении определяет крутящий момент поворота при рулении, который прикладывается к рулевому валу US рассматриваемого транспортного средства через операцию поворота руля SW, и выводит сигнал, указывающий крутящий момент Tra поворота при рулении. Датчик 16 скорости транспортного средства определяет скорость движения рассматриваемого транспортного средства (скорость транспортного средства) и выводит сигнал, указывающий скорость SPD транспортного средства.
[0039] Радарный датчик 17a получает информацию относительно дороги впереди рассматриваемого транспортного средства и стереоскопических объектов на дороге. Стереоскопические объекты включают в себя, например, движущиеся объекты, такие как пешеход, велосипед и автомобиль, и неподвижные объекты, такие как столб линии электропередач, дерево и дорожное ограждение. В дальнейшем в этом документе, эти стереоскопические объекты могут называться "целевым объектом".
[0040] Радарный датчик 17a включает в себя "радарный приемо-передающий узел и узел обработки сигналов", ни один из которых не показан. Радарный приемо-передающий узел испускает радиоволну в полосе частот миллиметрового диапазона (в дальнейшем называемую "миллиметровой волной") для периферийной области рассматриваемого транспортного средства, которая включает в себя область впереди рассматриваемого транспортного средства, и принимает миллиметровую волну, которая отражается посредством целевого объекта, существующего в диапазоне излучения (т.е. отраженную волну). На основе разности фаз между передаваемой миллиметровой волной и принимаемой отраженной волной, уровня ослабления отраженной волны, времени от передачи миллиметровой волны до приема отраженной волны и т.п., узел обработки сигналов получает расстояние Dfx(n) между транспортными средствами (продольное расстояние), относительную скорость Vfx(n), горизонтальное расстояние Dfy(n), относительную горизонтальную скорость Vfy(n) и т.п. относительно каждого обнаруженного целевого объекта (n) каждый раз, когда указанное время истекает.
[0041] Расстояние Dfx(n) между транспортными средствами представляет собой расстояние между рассматриваемым транспортным средством и целевым объектом (n) (например, едущим впереди транспортным средством) вдоль центральной оси рассматриваемого транспортного средства. Относительная скорость Vfx(n) представляет собой разность (=Vs-Vj) между скоростью Vs целевого объекта (n) (например, едущего впереди транспортного средства) и скоростью Vj рассматриваемого транспортного средства VA. Скорость Vs целевого объекта (n) представляет собой скорость целевого объекта (n) в направлении движения рассматриваемого транспортного средства. Горизонтальное расстояние Dfy(n) представляет собой расстояние "центральной позиции целевого объекта (n) (например, центральной позиции по ширине транспортного средства едущего впереди транспортного средства)" от центральной оси рассматриваемого транспортного средства в направлении, которое является ортогональным к центральной оси. Горизонтальное расстояние Dfy(n) также называется "горизонтальной позицией". Относительная горизонтальная скорость Vfy(n) представляет собой скорость в центральной позиции целевого объекта (n) (например, центральной позиции по ширине транспортного средства едущего впереди транспортного средства) в направлении, которое является ортогональным к центральной оси рассматриваемого транспортного средства.
[0042] Устройство 17b камеры включает в себя "стереокамеру и узел обработки изображений", ни один из которых не показан. Стереокамера получает правую и левую пару данных изображения посредством захвата обстановки для левой области и правой области впереди транспортного средства. На основе правой и левой пары данных изображения, захваченных посредством стереокамеры, узел обработки изображений вычисляет и выводит присутствие или отсутствие целевого объекта, относительную взаимосвязь между рассматриваемым транспортным средством и целевым объектом и т.п.
[0043] Следует отметить, что ECU 10 помощи при вождении определяет относительную взаимосвязь между рассматриваемым транспортным средством и целевым объектом (информацию целевых объектов) посредством синтезирования относительной взаимосвязи между рассматриваемым транспортным средством и целевым объектом, полученную посредством радарного датчика 17a, и относительной взаимосвязи между рассматриваемым транспортным средством и целевым объектом, полученную посредством устройства 17b камеры. Кроме того, на основе правой и левой пары данных изображения (данных изображения дороги), захваченных посредством устройства 17b камеры, ECU 10 помощи при вождении распознает разделительные линии (в дальнейшем называемые просто "разделительными полосами"), к примеру, правую и левую разделительные полосы, на дороге и получает форму дороги (радиус кривизны, указывающий степень кривизны дороги), позиционную взаимосвязь между дорогой и транспортным средством и т.п. Кроме того, на основе данных изображения дороги, захваченных посредством устройства 17b камеры, ECU 10 помощи при вождении может получать информацию относительно того, присутствует или нет придорожный экран.
[0044] Рабочий переключатель 18 представляет собой переключатель, управляемый водителем. Водитель может выбирать то, следует или нет выполнять управление помощью в удержании на полосе движения (LKA) посредством управления рабочим переключателем 18. Кроме того, водитель может выбирать то, следует или нет выполнять адаптивное оптимальное регулирование скорости (ACC), посредством управления рабочим переключателем 18.
[0045] Датчик 19 скорости относительно вертикальной оси определяет скорость относительно вертикальной оси рассматриваемого транспортного средства и выводит фактическую скорость YRa относительно вертикальной оси.
[0046] ECU 10 помощи при вождении может выполнять LKA и ACC. Кроме того, как описано ниже, ECU 10 помощи при вождении определяет то, находится или нет водитель в анормальном состоянии, в котором водитель теряет способность к вождению транспортного средства (в анормальном состоянии неспособности к вождению) и выполняет различные типы управления, включающие в себя управление помощью в удержании на полосе движения, при определении того, что водитель находится в анормальном состоянии неспособности к вождению.
[0047] Навигационный ECU 20 соединяется с приемным GPS-устройством 21, которое принимает GPS-сигнал для определения позиции рассматриваемого транспортного средства, картографической базой 22 данных, которая сохраняет картографическую информацию и т.п., дисплеем 23 с сенсорной панелью в качестве человеко-машинного интерфейса и т.п. Навигационный ECU 20 идентифицирует позицию Pnow в текущий момент времени (текущую позицию) рассматриваемого транспортного средства на основе GPS-сигнала, выполняет различные типы арифметической обработки на основе позиции Pnow рассматриваемого транспортного средства, картографической информации, сохраненной в картографической базе 22 данных и т.п., и направляет водителя по маршруту посредством использования дисплея 23.
[0048] Картографическая информация, сохраненная в картографической базе 22 данных, включает в себя информацию дороги. Информация дороги включает в себя параметр, который указывает форму дороги в расчете на участок дороги (например, радиус кривизны дороги, указывающий степень кривизны дороги или кривизны). Следует отметить, что кривизна является инверсией радиуса кривизны.
[0049] ECU 30 двигателя соединяется с исполнительным устройством 31 двигателя. Исполнительное устройство 31 двигателя представляет собой исполнительное устройство, который изменяет рабочее состояние двигателя 32 внутреннего сгорания. В этом примере, двигатель 32 внутреннего сгорания представляет собой многоцилиндровый двигатель с впрыском бензинового топлива и с искровым зажиганием и включает в себя дроссельный клапан для регулирования объема всасываемого воздуха. Исполнительное устройство 31 двигателя, по меньшей мере, включает в себя исполнительное устройство дроссельного клапана, который изменяет степень открытия дроссельного клапана. ECU 30 двигателя может изменять крутящий момент, который формируется посредством двигателя 32 внутреннего сгорания посредством приведения в действие исполнительного устройства 31 двигателя. Крутящий момент, сформированный посредством двигателя 32 внутреннего сгорания, передается на непроиллюстрированные ведущие колеса через непроиллюстрированную трансмиссию. Соответственно, ECU 30 двигателя может управлять мощностью приведения в движение рассматриваемого транспортного средства таким образом, чтобы изменять ускоренное состояние (ускорение) посредством исполнительного устройства 31 управления двигателем.
[0050] ECU 40 тормоза соединяется с тормозным исполнительным устройством 41. Тормозной исполнительное устройство 41 предоставляется в гидравлической схеме между главным цилиндром, который не показан, и фрикционным тормозным механизмом 42, главный цилиндр нагнетает давление на гидравлическое масло посредством силы нажатия педали тормоза, и фрикционный тормозной механизм 42 предоставляется на каждом из правых и левых передних и задних колес. Фрикционный тормозной механизм 42 включает в себя тормозной диск 42a, прикрепленный к колесу, и суппорт 42b тормоза, прикрепленный к кузову транспортного средства. Тормозной исполнительное устройство 41 регулирует гидравлическое давление, которое подается в колесный тормозной цилиндр, размещенный в суппорте 42b тормоза, в соответствии с инструкцией из ECU 40 тормоза и приводит в действие колесный тормозной цилиндр посредством гидравлического давления. Таким образом, тормозная колодка прижимается к тормозному диску 42a, чтобы формировать фрикционную тормозную силу. Таким образом, ECU 40 тормоза может управлять тормозной силой рассматриваемого транспортного средства посредством управления тормозным исполнительным устройством 41.
[0051] ECU 50 электрического парковочного тормоза (в дальнейшем может называться "EPB ECU") соединяется с исполнительным устройством 51 парковочного тормоза (в дальнейшем может называться "PKB-исполнительным устройством"). PKB-исполнительное устройство 51 представляет собой исполнительное устройство, который прижимает тормозную колодку к тормозному диску 42a, или который прижимает башмак к барабану, когда барабанный тормоз предоставляется, и барабан вращается с колесом. Таким образом, EPB ECU 50 прикладывает тормозную силу при парковке к каждому из колес посредством использования PKB-исполнительного устройства 51 и за счет этого может поддерживать транспортное средство в остановленном состоянии.
[0052] ECU 60 рулевого управления представляет собой модуль управления известной системы рулевого управления с электроусилителем руля и соединяется с приводным механизмом 61 электромотора. Приводной механизм 61 электромотора соединяется с электромотором 62 рулевого управления. Электромотор 62 рулевого управления встраивается в непроиллюстрированный "механизм рулевого управления, который включает в себя руль, рулевой вал, соединенный с рулем, рулевую зубчатую передачу и т.п." транспортного средства. Электромотор 62 рулевого управления формирует крутящий момент посредством электроэнергии, подаваемой из приводного механизма 61 электромотора, может добавлять вспомогательный крутящий момент при рулении посредством этого крутящего момента и может поворачивать правое и левое поворотные колеса.
[0053] ECU 70 приборной панели соединяется с непроиллюстрированной приборной панелью с цифровым дисплеем, а также соединяется с лампой 71 сигнала аварийной остановки и лампой 72 стоп-сигнала. ECU 70 приборной панели может мигать лампой 71 сигнала аварийной остановки и зажигать лампу 72 стоп-сигнала в соответствии с инструкцией из ECU 10 помощи при вождении.
[0054] ECU 80 выдачи аварийных сигналов соединяется с зуммером 81 и индикатором 82. В соответствии с инструкцией из ECU 10 помощи при вождении, ECU 80 выдачи аварийных сигналов может издавать звук зуммера 81, чтобы оповещать водителя, зажигать предупредительную метку (например, лампу аварийной сигнализации), отображать предупреждающее сообщение и отображать состояние приведения в действие управления помощью при вождении на индикаторе 82.
[0055] Кроме того, ECU 10 помощи при вождении соединяется с кнопкой 90 подтверждения. Кнопка 90 подтверждения располагается в позиции, в которой водитель может нажимать кнопку 90 подтверждения, выводит сигнал с низким уровнем в случае отсутствия нажатия и выводит сигнал с высоким уровнем при нажатии для операции.
[0056] Общее представление приведения в действие
Далее приводится описание первичного приведения в действие ECU 10 помощи при вождении (в дальнейшем также называемого просто "ECU 10") согласно первому устройству. ECU 10 определяет то, находится или нет водитель в "анормальном состоянии, в котором водитель теряет способность к вождению транспортного средства (в анормальном состоянии неспособности к вождению)", посредством использования одного из различных способов, которые описываются ниже. Например, в случае если скорость SPD транспортного средства для рассматриваемого транспортного средства равна или выше указанной скорости SPDth транспортного средства, ECU 10 определяет (отслеживает) то, продолжается или нет нерабочее состояние, в котором ни одна из "рабочей величины AP нажатия педали акселератора, рабочей величины BP нажатия педали тормоза и крутящего момента Tra поворота при рулении" не изменяется (состояние, в котором операция вождения не выполняется) в течение порогового времени определения анормальности или более. Когда нерабочее состояние продолжается в течение порогового времени определения анормальности или более, определяется то, что водитель находится в анормальном состоянии неспособности к вождению (такое определение, что водитель переходит в анормальное состояние неспособности к вождению, подтверждается).
[0057] ECU 10 выполняет управление помощью в удержании на полосе движения (LKA) при определении того, что водитель находится в анормальном состоянии неспособности к вождению. Управление помощью в удержании на полосе движения представляет собой управление для приложения крутящего момента поворота при рулении к механизму рулевого управления, с тем чтобы помогать операции руления водителем таким образом, что позиция рассматриваемого транспортного средства поддерживается около целевой линии движения в "полосе (полосе движения), в которой движется рассматриваемое транспортное средство". Известно непосредственно управление помощью в удержании на полосе движения (например, см. публикацию заявки на патент (Япония) номер 2008-195402 (JP 2008-195402 А), публикацию заявки на патент (Япония) номер 2009-190464 (JP 2009-190464 А), публикацию заявки на патент (Япония) номер 2010-6279 (JP 2010-6279 А), подробное описание патента (Япония) № 4349210 и т.п.). Таким образом, ниже кратко описывается управление помощью в удержании на полосе движения.
[0058] Более конкретно, на основе данных изображения, передаваемых из устройства 17b камеры, ECU 10 распознает (получает) "левую разделительную полосу LL и правую разделительную полосу LR" полосы движения, в которой движется рассматриваемое транспортное средство, и определяет центральную позицию между этими парными разделительными полосами в качестве целевой линии Ld движения. Кроме того, ECU 10 вычисляет: радиус R кривой (радиус кривизны) целевой линии Ld движения; и позицию и направление рассматриваемого транспортного средства на полосе движения, которая задается посредством левой разделительной полосы LL и правой разделительной полосы LR.
[0059] Затем ECU 10 вычисляет: расстояние Dc (в дальнейшем называемое "межцентровым расстоянием Dc") в направлении ширины дороги между передней концевой центральной позицией рассматриваемого транспортного средства и целевой линией Ld движения; и угол θy отклонения (в дальнейшем называемый "углом θy относительно вертикальной оси") между направлением целевой линии Ld движения и направлением движения рассматриваемого транспортного средства.
[0060] Кроме того, на основе межцентрового расстояния Dc, угла θy относительно вертикальной оси и кривизны ν дороги (=1/радиус R кривизны), ECU 10 вычисляет целевую скорость YRc* относительно вертикальной оси посредством следующего уравнения (1) в указанном цикле вычисления. В уравнении (1), K1, K2 и K3 представляют собой усиления системы управления. Целевая скорость YRc* относительно вертикальной оси представляет собой скорость относительно вертикальной оси, которая задается с возможностью обеспечивать возможность рассматриваемому транспортному средству двигаться по целевой линии Ld движения. YRc*=K1*Dc+K2*θy+K3*ν...(1)
[0061] На основе этой целевой скорости YRc* относительно вертикальной оси и фактической скорости YRa относительно вертикальной оси, ECU 10 вычисляет целевой крутящий момент Tr* поворота при рулении для получения целевой скорости YRc* относительно вертикальной оси в указанном цикле вычисления. Более конкретно, ECU 10 сохраняет таблицу поиска заранее, причем таблица поиска задает взаимосвязь между целевым крутящим моментом Tr* поворота при рулении и отклонением между целевой скоростью YRc* относительно вертикальной оси и фактической скоростью YRa относительно вертикальной оси. Затем ECU 10 вычисляет целевой крутящий момент Tr* поворота при рулении посредством применения отклонения между целевой скоростью YRc* относительно вертикальной оси и фактической скоростью YRa относительно вертикальной оси к этой таблице. После этого, ECU 10 помощи при вождении управляет электромотором 62 рулевого управления посредством использования ECU 60 рулевого управления таким образом, что фактический крутящий момент Tra поворота при рулении совпадает с целевым крутящим моментом Tr* поворота при рулении. Выше приведено общее представление управления помощью в удержании на полосе движения.
[0062] Помимо этого, при определении того, что водитель находится в анормальном состоянии неспособности к вождению, как показано на фиг. 2A и фиг. 2B, ECU 10 вычисляет требуемое расстояние остановки (=SPDnow2/(2*|Dec|), которое представляет собой расстояние до остановки рассматриваемого транспортного средства (скорость SPD транспортного средства=0) посредством замедления рассматриваемого транспортного средства от текущей скорости SPDnow транспортного средства для рассматриваемого транспортного средства с постоянным замедлением Dec. В случае если рассматриваемое транспортное средство замедляется от текущей скорости SPDnow транспортного средства с постоянным замедлением Dec, ECU 10 вычисляет скорость SPD(px) транспортного средства для рассматриваемого транспортного средства в точке px, которой достигает рассматриваемое транспортное средство после движения на расстояние x из текущей позиции Pnow.
[0063] ECU 10 идентифицирует позицию Pstop, в которой останавливается рассматриваемое транспортное средство, из текущей позиции Pnow и требуемого расстояния остановки рассматриваемого транспортного средства. ECU 10 получает информацию относительно формы дороги между текущей позицией Pnow и позицией Pstop остановки из картографической базы 22 данных через навигационный ECU 20. Информация относительно этой формы дороги включает в себя радиус R кривизны дороги в расчете на участок дороги (участок дороги) между текущей позицией Pnow и позицией Pstop остановки. Другими словами, ECU 10 получает радиус R(px) кривизны дороги в точке px.
[0064] На основе радиуса R(px) кривизны дороги, ECU 10 вычисляет нижнюю предельную скорость SL(px) транспортного средства в точке px, которой достигает рассматриваемое транспортное средство после движения на расстояние x из текущей позиции Pnow. По мере того, как радиус R(px) кривизны уменьшается, искривленная дорога становится более крутой (более крутой кривой). Таким образом, по мере того, как радиус R(px) кривизны уменьшается, видимость ухудшается (т.е. расстояние, на которое водитель транспортного средства позади может визуально распознавать едущее впереди транспортное средство, является небольшим, другими словами, время, когда водитель транспортного средства позади распознает едущее впереди транспортное средство имеет тенденцию задерживаться). На основе такой точки зрения, нижняя предельная скорость SL(px) транспортного средства задается таким образом, что она увеличивается по мере того, как радиус R(px) кривизны уменьшается. Нижняя предельная скорость SL(px) транспортного средства задается равной такой скорости, что когда рассматриваемое транспортное средство движется с более низкой скоростью, чем нижняя предельная скорость SL(px) транспортного средства, водитель транспортного средства позади должен резко тормозить транспортное средство позади сразу после распознавания рассматриваемого транспортного средства.
[0065] ECU 10 определяет то, становится или нет скорость SPD(px) транспортного средства ниже нижней предельной скорости SL(px) транспортного средства между текущей позицией Pnow и позицией Pstop остановки. Например, в примере, показанном на фиг. 2A, точка px, в которой скорость SPD(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства, не существует до остановки рассматриваемого транспортного средства. Соответственно, в этом случае, ECU 10 сразу начинает замедление рассматриваемого транспортного средства при замедлении Dec от момента tnow времени, в который определяется то, что водитель находится в анормальном состоянии неспособности к вождению (т.е. момента времени определения анормальности). Следует отметить, что ECU 10 вычисляет ускорение рассматриваемого транспортного средства из величины изменения скорости SPD транспортного средства в единицу времени, которая получается на основе сигнала из датчика 16 скорости транспортного средства, и передает сигнал команды управления, используемый для того, чтобы заставлять ускорение соответствовать замедлению Dec (или целевому ускорению), в ECU 30 двигателя и ECU 40 тормоза. Этот аспект является идентичным в других вариантах осуществления.
[0066] С другой стороны, в примере, указываемом посредством пунктирной линии на фиг. 2B, существует точка px, в которой скорость SPD(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства до остановки рассматриваемого транспортного средства. Соответственно, как указано посредством сплошной линии на фиг. 2B, ECU 10 задерживает момент времени, в который рассматриваемое транспортное средство начинает замедление от момента tnow времени определения анормальности, и замедляет рассматриваемое транспортное средство с постоянным замедлением Dec таким образом, что скорость SPD(px) транспортного средства не становится ниже нижней предельной скорости SL(px) транспортного средства в период от начала замедления рассматриваемого транспортного средства до остановки рассматриваемого транспортного средства. Согласно этому, ситуация, когда рассматриваемое транспортное средство, водитель которого находится в анормальном состоянии неспособности к вождению (т.е. замедляемое целевое транспортное средство), движется с чрезмерно низкой скоростью на круто искривленной дороге с плохой видимостью, не возникает. Таким образом, при распознавании рассматриваемого транспортного средства, водитель транспортного средства позади может замедляться или останавливаться без резкого торможения транспортного средства позади.
[0067] Кроме того, первое устройство замедляет замедляемое целевое транспортное средство (рассматриваемое транспортное средство) при поддержании постоянного замедления. Такое замедление с поддержанием постоянного замедления отличается от замедления во время автоматического управления скоростью транспортного средства в нормальном ACC (описывается ниже) и т.п. Соответственно, пассажиры, включающие в себя водителя замедляемого целевого транспортного средства, могут испытывать чувство дискомфорта. Таким образом, если водитель не находится в анормальном состоянии неспособности к вождению, водитель и пассажир, если пассажир существует, могут распознавать, что транспортное средство принудительно замедляется. Помимо этого, поскольку замедление не колеблется, может уменьшаться вероятность того, что водитель другого транспортного средства (включающего в себя транспортное средство позади), движущегося около замедляемого целевого транспортного средства, должен выполнять специальную операцию вождения, такую как резкое торможение или резкое руление. Следует отметить, что этот эффект представляет собой эффект, прилагаемый аналогичным образом в другом аспекте (описывается ниже), в котором замедляемое целевое транспортное средство замедляется при поддержании постоянного замедления. Выше приведено общее представление приведения в действие первого устройства.
[0068] Конкретное приведение в действие
Далее приводится описание конкретного приведения в действие CPU в ECU 10 согласно первому устройству. CPU выполняет процедуры, показанные на блок-схемах последовательности операций способа по фиг. 3-5, каждый раз, когда истекает указанное время.
[0069] - Обработка начала замедления транспортного средства
В указанное время, CPU начинает обработку на этапе 300 на фиг. 3, и обработка переходит к этапу 305. Затем определяется то, находится или нет текущий момент времени сразу после того, как значение флага Xijo (флага возникновения анормальности водителя) изменяется с 0 на 1, причем флаг Xijo указывает то, что подтверждается определение нахождения водителя в анормальном состоянии неспособности к вождению. Значение этого флага Xijo задается равным 0 в начальной процедуре, которая не показана и выполняется посредством CPU, когда переключатель зажигания, который не показан, изменяется с отключенной позиции на включенную позицию. Затем, как описано ниже, когда определение того, что водитель находится в анормальном состоянии неспособности к вождению, подтверждается, значение этого флага Xijo задается равным 1.
[0070] Соответственно, если водитель не переходит в анормальное состояние неспособности к вождению после начала приведения в действие рассматриваемого транспортного средства этого времени, значение флага Xijo остается равным 0. В этом случае, CPU определяет "Нет" на этапе 305, а также определяет "Нет" на этапе 310, в котором определяется то, равно или нет значение флага Xijo 1. Затем обработка непосредственно переходит к этапу 395, и эта процедура сразу завершается. Таким образом, рассматриваемое транспортное средство принудительно не замедляется в этом случае.
[0071] С другой стороны, если определено то, что водитель переходит в анормальное состояние неспособности к вождению во время после начала приведения в действие рассматриваемого транспортного средства этого времени, значение флага Xijo изменяется с 0 на 1. Сразу после этого изменения, CPU определяет "Да" на этапе 305 и последовательно выполняет обработку от этапа 315 до этапа 345, которая описывается ниже. После этого обработка переходит к этапу 350.
[0072] Этап 315. CPU сохраняет скорость SPD транспортного средства, которая получается на основе сигнала из датчика 16 скорости транспортного средства, в качестве текущей скорости SPDnow транспортного средства. Этап 320. В соответствии с таким допущением, что транспортное средство замедляется от текущей скорости SPDnow транспортного средства при поддержании постоянного замедления Dec, CPU вычисляет требуемое расстояние Lstop остановки, которое описывается выше, на основе текущей скорости SPDnow транспортного средства и постоянного замедления Dec. Этап 325. CPU получает текущую позицию Pnow из навигационного ECU 20 и сохраняет текущую позицию Pnow в качестве позиции Pd начала замедления. Этап 330. При таком допущении, что транспортное средство замедляется от текущей скорости SPDnow транспортного средства при поддержании постоянного замедления Dec, CPU вычисляет скорость SPD(px) транспортного средства в точке px, которая представляет собой точку на участке от позиции Pd начала замедления до точки, отстоящей от нее на требуемое расстояние Lstop остановки, к также представляет собой точку, которой достигает рассматриваемое транспортное средство после движения на расстояние x из позиции Pd начала замедления.
[0073] Этап 335. CPU идентифицирует позицию Pstop, в которой рассматриваемое транспортное средство предположительно должно быть остановлено (в дальнейшем называемую "позицией остановки транспортного средства"), из позиции Pd начала замедления и требуемого расстояния Lstop остановки. Этап 340. CPU получает радиус R(px) кривизны в точке px на участке от позиции Pd начала замедления до позиции Pstop остановки транспортного средства из картографической базы 22 данных через навигационный ECU 20. В картографической базе 22 данных радиус кривизны задается в расчете на участок дороги.
[0074] Этап 345. CPU получает нижнюю предельную скорость SL(px) транспортного средства в точке px посредством применения радиуса R(px) кривизны к таблице MapSL(R) поиска, показанной в блоке B1 по фиг. 3. Согласно таблице MapSL(R), большее значение нижней предельной скорости SL(px) транспортного средства получается по мере того, как радиус R(px) кривизны уменьшается. Следует отметить, что поскольку радиус кривизны задается в расчете на участок дороги в картографической базе 22 данных, нижняя предельная скорость SL(px) транспортного средства также получается в расчете на участок дороги. Другими словами, нижняя предельная скорость SL(px) транспортного средства не изменяется (постоянное значение) на идентичном участке дороги.
[0075] Затем, обработка переходит к этапу 350, и CPU определяет то, имеется или нет точка px, в которой скорость SPD(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства. Если точка px, в которой скорость SPD(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства, не существует (см. фиг. 2A), CPU определяет "Нет" на этапе 350, обработка переходит к этапу 355, и CPU определяет то, совпадает или нет текущая позиция Pnow рассматриваемого транспортного средства с позицией Pd начала замедления. В этом случае, текущая позиция Pnow совпадает с позицией Pd начала замедления вследствие обработки на вышеуказанном этапе 325. Таким образом, CPU определяет "Да" на этапе 355, обработка переходит к этапу 360, и CPU начинает замедление рассматриваемого транспортного средства с постоянным замедлением Dec. Следует отметить, что когда значение флага Xijo равно 1, CPU автоматически выполняет вышеописанное управление помощью в удержании на полосе движения (LKA). Этот аспект является идентичным в других вариантах осуществления.
[0076] Если CPU выполняет обработку на этапе 305 снова в этом состоянии, CPU определяет "Нет" на этапе 305, обработка переходит к этапу 310, и CPU определяет "Да" на этапе 310. Затем обработка переходит к этапу 365, и CPU определяет то, представляет он собой или нет момент времени до того, как рассматриваемое транспортное средство начинает замедление с постоянным замедлением Dec (перед началом замедления). В этот момент времени, рассматриваемое транспортное средство замедляется. Таким образом, CPU определяет "Нет" на этапе 365, обработка непосредственно переходит к этапу 395, и эта процедура сразу завершается.
[0077] С другой стороны, если точка px, в которой скорость SPD(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства, существует в момент времени, в который CPU выполняет обработку на этапе 350 (см. пунктирную линию на фиг. 2B), CPU определяет "Да" на этапе 350, обработка переходит к этапу 375, и CPU задает позицию Pd начала замедления в позиции, в которой транспортное средство продвигается вперед на расстояние Z. После этого, CPU повторяет обработку от этапа 330 до этапа 350. Затем если определено на этапе 350, что точка px, в которой скорость SPD(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства, по-прежнему существует, CPU задает позицию Pd начала замедления в позиции, в которой транспортное средство дополнительно продвигается вперед на расстояние Z в обработке на этапе 375, и повторяет обработку от этапа 330 до этапа 350. Если CPU определяет то, что точка px, в которой скорость SPD(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства, более не существует после такой обработки, обработки переходит от этапа 350 к этапу 355.
[0078] В этот момент времени, текущая позиция Pnow не совпадает с позицией Pd начала замедления. Таким образом, CPU определяет "Нет" на этапе 355, обработка непосредственно переходит к этапу 395, и эта процедура сразу завершается. После этого, когда обработка переходит к этапу 305 снова, CPU определяет "Нет" на этапе 305, определяет "Да" на следующем этапе 310 и дополнительно определяет "Да" на следующем этапе 365. Затем обработка переходит к этапу 370. На этапе 370, CPU заставляет рассматриваемое транспортное средство двигаться с постоянной скоростью, с тем, чтобы поддерживать скорость транспортного средства в момент времени. После этого, обработка переходит к этапу 355. Соответственно, в момент времени, в который текущая позиция Pnow рассматриваемого транспортного средства совпадает с позицией Pd начала замедления, CPU определяет "Да" на этапе 355, обработка переходит к этапу 360, и CPU начинает замедление рассматриваемого транспортного средства.
[0079] - Обработка завершения замедления транспортного средства
В дополнительное указанное время, CPU начинает обработку от этапа 400 на фиг. 4, обработка переходит к этапу 410, и CPU определяет то, равно или нет значение флага Xijo 1. Если значение флага Xijo не равно 1 (если равно 0), CPU определяет "Нет" на этапе 410, обработка непосредственно переходит к этапу 495, и эта процедура сразу завершается.
[0080] С другой стороны, если значение флага Xijo равно 1, CPU определяет "Да" на этапе 410, обработка переходит к этапу 420, и CPU определяет то, равна или нет скорость SPD транспортного средства для рассматриваемого транспортного средства 0 (т.е. остановлено или нет рассматриваемое транспортное средство). Если скорость SPD транспортного средства не равна 0, CPU определяет "Нет" на этапе 420, обработка непосредственно переходит к этапу 495, и эта процедура сразу завершается.
[0081] С другой стороны, если скорость SPD транспортного средства равна 0, CPU определяет "Да" на этапе 420 и последовательно выполняет обработку на этапе 430 и этапе 440, которая описывается ниже. Затем обработка переходит к этапу 495, и эта процедура сразу завершается.
[0082] Этап 430. CPU прекращает замедление рассматриваемого транспортного средства. Этап 440. CPU добавляет тормозную силу при парковке на колеса посредством использования EPB ECU 50. Таким образом, ECU 10 помощи при вождении поддерживает рассматриваемое транспортное средство в остановленном состоянии. Кроме того, CPU мигает лампой 71 сигнала аварийной остановки посредством использования ECU 70 приборной панели и разблокирует дверь транспортного средства посредством использования ECU замка блокировки двери, который не показан.
[0083] - Определение анормальности водителя
В указанное время, CPU начинает обработку от этапа 500 на фиг. 5, обработка переходит к этапу 510, и определяет то, равно или нет значение флага Xijo 0. Если значение флага Xijo возникновения анормальности водителя не равно 0 (если равно 1), CPU определяет "Нет" на этапе 510, обработка непосредственно переходит к этапу 595, и эта процедура сразу завершается.
[0084] С другой стороны, если значение флага Xijo равно 0, CPU определяет "Да" на этапе 510, обработка переходит к этапу 520, и CPU определяет то, равна или выше либо нет скорость SPD транспортного средства указанной скорости SPDth транспортного средства (скорости транспортного средства для разрешения определения анормальности, скорости транспортного средства для разрешения принудительного замедления). Если скорость SPD транспортного средства не равна или выше указанной скорости SPDth транспортного средства, CPU определяет "Нет" на этапе 520, обработка непосредственно переходит к этапу 595, и эта процедура сразу завершается. В это время, CPU может задавать значение таймера Tijo определения анормальности, который описывается ниже, равным 0. Следует отметить, что указанная скорость SPDth транспортного средства задается равной большему значению, чем максимальное значение нижней предельной скорости транспортного средства.
[0085] С другой стороны, если скорость SPD транспортного средства равна или выше указанной скорости SPDth транспортного средства, CPU определяет "Да" на этапе 520, обработка переходит к этапу 530, и CPU определяет то, соответствует или нет текущий момент времени нерабочему состоянию вождения (рабочему состоянию при отсутствии вождения). Нерабочее состояние вождения представляет собой состояние, в котором ни один из параметров, каждый из которых имеет комбинацию одного или более из "рабочей величины AP нажатия педали акселератора, рабочей величины BP нажатия педали тормоза, крутящего момента Tra поворота при рулении и уровня сигнала переключателя 13 лампы стоп-сигнала", не изменяется водителем. В этом примере, CPU рассматривает состояние, в котором ни одно из "рабочей величины AP нажатия педали акселератора, рабочей величины BP нажатия педали тормоза и крутящего момента Tra поворота при рулении" не изменяется, в качестве нерабочего состояния вождения.
[0086] Если текущий момент времени не соответствует нерабочему состоянию вождения, CPU определяет "Нет" на этапе 530, обработка переходит к этапу 535, и CPU задает значение таймера Tijo определения анормальности равным 0. После этого, обработка непосредственно переходит к этапу 595, и эта процедура сразу завершается.
[0087] С другой стороны, если текущий момент времени соответствует нерабочему состоянию вождения, CPU определяет "Да" на этапе 530, обработка переходит к этапу 540, и CPU увеличивает значение таймера Tijo определения анормальности на 1. Соответственно, значение таймера Tijo определения анормальности представляет длительность нерабочего состояния вождения.
[0088] Затем, обработка переходит к этапу 550, и CPU определяет то, равно или выше либо нет значение таймера Tijo определения анормальности порогового времени Tkeikoku начала предупреждения. Если значение таймера Tijo определения анормальности меньше порогового времени Tkeikoku начала предупреждения, CPU определяет "Нет" на этапе 550, обработка непосредственно переходит к этапу 595, и эта процедура сразу завершается.
[0089] С другой стороны, если значение таймера Tijo определения анормальности равно или выше порогового времени Tkeikoku начала предупреждения, CPU определяет "Да" на этапе 550, и обработка переходит к этапу 560. CPU инструктирует зуммеру 81 формировать предупреждающий звук, мигает "лампой аварийной сигнализации" на индикаторе 82 и отображает предупреждающее сообщение, чтобы инструктировать операцию нажатия/поворота любого из "педали 11a акселератора, педали 12a тормоза и руля SW".
[0090] Затем, обработка переходит к этапу 570, и CPU определяет то, равно или выше либо нет значение таймера Tijo определения анормальности порогового времени Tijoth определения анормальности водителя. Пороговое время Tijoth определения анормальности водителя задается в качестве большего времени, чем пороговое время Tkeikoku начала предупреждения. Если значение таймера Tijo определения анормальности меньше порогового времени Tijoth определения анормальности водителя, CPU определяет "Нет" на этапе 570, обработка непосредственно переходит к этапу 595, и эта процедура сразу завершается.
[0091] С другой стороны, если значение таймера Tijo определения анормальности равно или выше порогового времени Tijoth определения анормальности водителя, CPU определяет "Да" на этапе 570, процесс переходит к этапу 580, и CPU задает значение флага Xijo возникновения анормальности водителя равным 1. Затем, обработка переходит к этапу 590, и CPU запрещает ускорение (включающее в себя замедление) транспортного средства на основе изменения рабочей величины AP нажатия педали акселератора, даже когда рабочая величина AP нажатия педали акселератора изменяется. Таким образом, CPU запрещает переопределение ускорения. Затем обработка переходит к этапу 595, и эта процедура сразу завершается. Как описано выше, когда нерабочее состояние вождения продолжается в течение порогового времени Tkeikoku начала предупреждения или более, выдается предупреждение, чтобы инструктировать водителю выполнять операцию вождения. Затем когда нерабочее состояние вождения продолжается в течение порогового времени Tijoth определения анормальности водителя или более, такое определение, что водитель находится в анормальном состоянии неспособности к вождению, подтверждается, и значение флага Xijo задается равным 1.
[0092] Как описано выше, первое устройство замедляет замедляемое целевое транспортное средство при управлении скоростью транспортным средством замедляемого целевого транспортного средства таким образом, что скорость транспортного средства для замедляемого целевого транспортного средства от момента времени определения анормальности до момента времени, в который замедляемое целевое транспортное средство остановлено, не становится ниже нижней предельной скорости транспортного средства, которая задается в соответствии с радиусом кривизны, указывающим форму дороги, по которой движется замедляемое целевое транспортное средство (форму дороги, по которой движется замедляемое целевое транспортное средство, и форму дороги, которая оказывает влияние на время, когда водитель транспортного средства позади замедляемого целевого транспортного средства распознает замедляемое целевое транспортное средство). Кроме того, первое устройство задает нижнюю предельную скорость транспортного средства равной большему значению по мере того, как радиус кривизны уменьшается.
[0093] Помимо этого, первое устройство определяет точку начала замедления таким образом, что скорость транспортного средства до остановки замедляемого целевого транспортного средства не опускается ниже нижней предельной скорости транспортного средства, которая задается в расчете на участок дороги, даже когда замедляемое целевое транспортное средство замедляется с постоянным замедлением в момент времени определения анормальности и далее.
[0094] Соответственно, когда замедляемое целевое транспортное средство движется по искривленной дороге с плохой видимостью, скорость транспортного средства для замедляемого целевого транспортного средства не уменьшается чрезмерно. Таким образом, даже когда время, когда водитель транспортного средства позади распознает замедляемое целевое транспортное средство, задерживается, транспортное средство позади может замедляться без резкого торможения транспортного средства позади.
[0095] Второй вариант осуществления
Далее приводится описание устройства управления движением транспортного средства (в дальнейшем может называться "вторым устройством"), согласно второму варианту осуществления изобретения. Аналогично первому устройству, при определении того, что водитель находится в анормальном состоянии неспособности к вождению, второе устройство определяет то, имеется или нет точка px, в которой скорость SPD(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства, от времени, в которое рассматриваемое транспортное средство начинает замедление с постоянным замедлением Dec, до времени, в которое рассматриваемое транспортное средство остановлено. Затем в случае, если точка px, в которой скорость SPD(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства, существует, как указано посредством пунктирной линии на фиг. 6, второе устройство уменьшает абсолютную величину замедления во время замедления рассматриваемого транспортного средства, как указано посредством сплошной линии на фиг. 6. Таким образом, второе устройство замедляет рассматриваемое транспортное средство при уменьшенном замедлении таким образом, что скорость SPD(px) транспортного средства не становится ниже нижней предельной скорости SL(px) транспортного средства до остановки рассматриваемого транспортного средства. Согласно этому, водитель транспортного средства позади также может замедлять или останавливать транспортное средство позади без резкого торможения транспортного средства позади при распознавании рассматриваемого транспортного средства. Выше приведено общее представление приведения в действие второго устройства.
[0096] Конкретное приведение в действие
Далее приводится описание конкретного приведения в действие CPU в ECU 10 согласно второму устройству. CPU выполняет процедуры, показанные на блок-схемах последовательности операций способа по фиг. 7, который заменяет фиг. 3, фиг. 4 и фиг. 5, каждый раз, когда истекает указанное время. Поскольку блок-схемы последовательности операций способа по фиг. 4 и фиг. 5 уже описаны, далее приводится описание приведения в действие (обработки начала замедления транспортного средства) на основе блок-схемы последовательности операций способа по фиг. 7.
[0097] В указанное время, CPU начинает обработку от этапа 700 на фиг. 7, обработка переходит к этапу 705, и CPU определяет то, находится или нет текущий момент времени сразу после того, как значение флага Xijo возникновения анормальности водителя изменяется с 0 на 1. Если водитель не переходит в анормальное состояние неспособности к вождению после начала приведения в действие рассматриваемого транспортного средства этого времени, значение флага Xijo равно 0. В этом случае, CPU определяет "Нет" на этапе 705, обработка непосредственно переходит к этапу 795, и эта процедура сразу завершается. Таким образом, в этом случае, рассматриваемое транспортное средство принудительно не замедляется.
[0098] С другой стороны, если определено то, что водитель переходит в анормальное состояние неспособности к вождению после начала приведения в действие рассматриваемого транспортного средства этого времени, значение флага Xijo изменяется с 0 на 1. В этом случае, CPU определяет "Да" на этапе 705 и последовательно выполняет обработку от этапа 710 до этапа 740, которая описывается ниже. После этого обработка переходит к этапу 745.
[0099] Этап 710. CPU сохраняет скорость SPD транспортного средства, которая получается на основе сигнала из датчика 16 скорости транспортного средства, в качестве текущей скорости SPDnow транспортного средства. Этап 715. CPU сохраняет (задает) начальное значение Dinitial в качестве замедления Dec. Этап 720. При таком допущении, что транспортное средство замедляется от текущей скорости SPDnow транспортного средства при поддержании постоянного замедления Dec, CPU вычисляет требуемое расстояние Lstop остановки, которое описывается выше, на основе текущей скорости SPDnow транспортного средства и постоянного замедления Dec. Этап 725. CPU получает текущую позицию Pnow рассматриваемого транспортного средства из навигационного ECU 20. Затем при таком допущении, что рассматриваемое транспортное средство замедляется от текущей скорости SPDnow транспортного средства при поддержании постоянного замедления Dec, CPU вычисляет скорость SPD(px) транспортного средства в точке px, которая представляет собой точку на участке от текущей позиции Pnow до точки, отстоящей от нее на требуемое расстояние Lstop остановки, и также представляет собой точку, которой достигает рассматриваемое транспортное средство после движения из текущей позиции Pnow на расстояние x.
[0100] Этап 730. CPU идентифицирует позицию Pstop остановки транспортного средства для рассматриваемого транспортного средства из текущей позиции Pnow рассматриваемого транспортного средства и требуемого расстояния Lstop остановки. Этап 735. CPU получает радиус R(px) кривизны в точке px на участке от текущей позиции Pnow рассматриваемого транспортного средства до позиции Pstop остановки транспортного средства из картографической базы 22 данных через навигационный ECU 20. Как описано выше, в картографической базе 22 данных, радиус кривизны задается в расчете на участок дороги. Этап 740. CPU получает нижнюю предельную скорость SL(px) транспортного средства в точке px посредством применения радиуса R(px) кривизны к таблице MapSL(R) поиска, показанной в блоке B1 по фиг. 7. Согласно таблице MapSL(R), большее значение нижней предельной скорости SL(px) транспортного средства получается по мере того, как радиус R(px) кривизны уменьшается. Следует отметить, что как описано выше, нижняя предельная скорость SL(px) транспортного средства получается в расчете на участок дороги.
[0101] Затем, обработка переходит к этапу 745, и CPU определяет то, имеется или нет точка px, в которой скорость SPD(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства. Если точка px, в которой скорость SPD(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства, не существует (см. фиг. 2A), CPU определяет "Нет" на этапе 745, обработка переходит к этапу 750, и CPU начинает замедление рассматриваемого транспортного средства с постоянным замедлением Dec.
[0102] С другой стороны, если точка px, в которой скорость SPD(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства, существует (см. пунктирную линию на фиг. 6), CPU определяет "Да" на этапе 745, обработка переходит к этапу 755, и CPU уменьшает абсолютную величину замедления Dec на положительное значение β. После этого, CPU повторяет обработку от этапа 720 до этапа 745. Как результат этого, если точка px, в которой скорость SPD(px) транспортного средства не становится ниже нижней предельной скорости SL(px) транспортного средства больше, существует, обработка переходит от этапа 745 к этапу 750, и CPU начинает замедление рассматриваемого транспортного средства с постоянным замедлением Dec, абсолютная величина которого уменьшается на положительное значение β. Следует отметить, что этап 755 многократно выполняется, если только не определяется "Нет" на этапе 745. Таким образом, абсолютная величина замедления Dec постепенно уменьшается.
[0103] Как описано выше, аналогично первому устройству, второе устройство замедляет замедляемое целевое транспортное средство при управлении скоростью транспортным средством замедляемого целевого транспортного средства таким образом, что скорость транспортного средства для замедляемого целевого транспортного средства от момента времени определения анормальности до момента времени, в который замедляемое целевое транспортное средство остановлено, не становится ниже нижней предельной скорости транспортного средства, которая задается в соответствии с радиусом кривизны, указывающим форму дороги, по которой движется замедляемое целевое транспортное средство. Кроме того, второе устройство задает нижнюю предельную скорость транспортного средства равной большему значению по мере того, как радиус кривизны уменьшается.
[0104] Помимо этого, второе устройство определяет замедление, при котором скорость транспортного средства до остановки замедляемого целевого транспортного средства не опускается ниже нижней предельной скорости транспортного средства, которая задается в расчете на участок дороги. Затем второе устройство замедляет замедляемое целевое транспортное средство при поддержании замедления.
[0105] Соответственно, когда замедляемое целевое транспортное средство движется по искривленной дороге с плохой видимостью, скорость транспортного средства для замедляемого целевого транспортного средства не уменьшается чрезмерно. Таким образом, даже когда время, когда водитель транспортного средства позади распознает замедляемое целевое транспортное средство, задерживается, транспортное средство позади может замедляться без резкого торможения транспортного средства позади.
[0106] Третий вариант осуществления
Далее приводится описание устройства управления движением транспортного средства (в дальнейшем может называться "третьим устройством") согласно третьему варианту осуществления изобретения. При определении того, что водитель находится в анормальном состоянии неспособности к вождению, третье устройство получает информацию относительно формы дороги между текущей позицией Pnow и ориентировочной позицией Ptstop остановки, которая находится впереди текущей позиции Pnow на достаточное расстояние, чтобы останавливать транспортное средство (в дальнейшем называемое "максимальным прогнозным расстоянием остановки"), из картографической базы 22 данных через навигационный ECU 20. Эта информация относительно формы дороги также включает в себя радиус R кривизны в расчете на участок дороги между текущей позицией Pnow и ориентировочной позицией Ptstop остановки. Другими словами, ECU 10 получает радиус R(px) кривизны дороги в точке px. Затем, третье устройство вычисляет нижнюю предельную скорость SL(px) транспортного средства в точке px на основе радиуса R(px) кривизны.
[0107] Затем третье устройство вычисляет скорость SL(px) транспортного средства в точке px в случае, если рассматриваемое транспортное средство замедляется с постоянным замедлением Dec. В случае если прогнозируется то, что скорость SL(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства, замедление рассматриваемого транспортного средства временно прекращается, чтобы поддерживать скорость транспортного средства (см. сплошную линию на фиг. 8) в период, в который скорость SL(px) транспортного средства становится ниже нижней предельной скорости SL(px) транспортного средства (см. пунктирную линию на фиг. 8 и период от времени t1 до времени t2). После этого, когда скорость SL(px) транспортного средства переводится в состояние равной или выше нижней предельной скорости SL(px) транспортного средства, третье устройство замедляет рассматриваемое транспортное средство с постоянным замедлением Dec снова. Третье устройство получает целевую скорость SPDtgt транспортного средства, с которой рассматриваемое транспортное средство замедляется, как описано выше, посредством вычисления в момент времени определения анормальности. После этого, в момент времени определения анормальности и далее, третье устройство постепенно замедляет рассматриваемое транспортное средство таким образом, что скорость SPD транспортного средства для рассматриваемого транспортного средства совпадает с целевой скоростью SPDtgt транспортного средства. Согласно этому, водитель транспортного средства позади также может замедлять или останавливать транспортное средство позади без резкого торможения транспортного средства позади при распознавании рассматриваемого транспортного средства. Выше приведено общее представление приведения в действие третьего устройства.
[0108] Конкретное приведение в действие
Далее приводится описание конкретного приведения в действие CPU в ECU 10 согласно третьему устройству. CPU выполняет процедуры, показанные на блок-схемах последовательности операций способа по фиг. 9, который заменяет фиг. 3, фиг. 4 и фиг. 5, каждый раз, когда истекает указанное время. Поскольку блок-схемы последовательности операций способа по фиг. 4 и фиг. 5 уже описаны, далее приводится описание приведения в действие (обработки замедления транспортного средства) на основе блок-схемы последовательности операций способа по фиг. 9.
[0109] В указанное время, CPU начинает обработку от этапа 900 на фиг. 9, обработка переходит к этапу 910, и CPU определяет то, находится или нет текущий момент времени сразу после того, как значение флага Xijo возникновения анормальности водителя изменяется с 0 на 1. Если водитель не переходит в анормальное состояние неспособности к вождению после начала приведения в действие рассматриваемого транспортного средства этого времени, значение флага Xijo равно 0. В этом случае, CPU определяет "Нет" на этапе 910, обработка непосредственно переходит к этапу 995, и эта процедура сразу завершается. Таким образом, в этом случае, рассматриваемое транспортное средство принудительно не замедляется.
[0110] С другой стороны, если момент времени, в который CPU выполняет обработку на этапе 910, находится сразу после того, как значение флага Xijo изменяется с 0 на 1, CPU определяет "Да" на этапе 910 и последовательно выполняет обработку от этапа 920 до этапа 960, которая описывается ниже. Затем обработка переходит к этапу 995, и эта процедура сразу завершается.
[0111] Этап 920. CPU сохраняет скорость SPD транспортного средства, которая получается на основе сигнала из датчика 16 скорости транспортного средства, в качестве текущей скорости SPDnow транспортного средства. Этап 930. CPU получает радиус R(px) кривизны в точке px на участке от текущей позиции Pnow рассматриваемого транспортного средства до вышеописанной ориентировочной позиции Ptstop остановки из картографической базы 22 данных через навигационный ECU 20. Как описано выше, в картографической базе 22 данных, радиус кривизны задается в расчете на участок дороги.
[0112] Этап 940. CPU получает нижнюю предельную скорость SL(px) транспортного средства в точке px посредством применения радиуса R(px) кривизны к таблице MapSL(R) поиска, показанной в блоке B1 по фиг. 9. Согласно таблице MapSL(R), большее значение нижней предельной скорости SL(px) транспортного средства получается по мере того, как радиус R(px) кривизны уменьшается. Как описано выше, нижняя предельная скорость SL(px) транспортного средства получается в расчете на участок дороги. Этап 950. В соответствии с таким допущением, что транспортное средство замедляется от текущей скорости SPDnow транспортного средства с постоянным замедлением Dec, CPU определяет целевую скорость SPDtgt транспортного средства посредством вышеописанного способа (см. временную диаграмму в блоке Ex по фиг. 9).
[0113] Этап 960. CPU выполняет требуемую обработку таким образом, чтобы постепенно уменьшать скорость SPD транспортного средства для рассматриваемого транспортного средства в соответствии с целевой скоростью SPDtgt транспортного средства, которая определяется на этапе 950. Как результат этого, в примере, показанном на временной диаграмме в блоке Ex по фиг. 9, рассматриваемое транспортное средство движется с постоянной скоростью от времени t1 до времени t2; тем не менее, рассматриваемое транспортное средство замедляется при поддержании постоянного замедления Dec в другой период.
[0114] Как описано выше, третье устройство замедляет замедляемое целевое транспортное средство с постоянным замедлением в момент времени определения анормальности и далее. В период от момента времени определения анормальности до момента времени, в который замедляемое целевое транспортное средство остановлено, замедление замедляемого целевого транспортного средства временно прерывается, и его скорость транспортного средства поддерживается (транспортное средство движется с постоянной скоростью) в период, в который скорость транспортного средства для замедляемого целевого транспортного средства предположительно должна становиться ниже нижней предельной скорости транспортного средства, которая задается в расчете на участок дороги. Рассматриваемое транспортное средство замедляется с постоянным замедлением в период, в который рассматриваемое транспортное средство не движется с постоянной скоростью.
[0115] Таким образом, можно не допускать падение скорости транспортного средства для замедляемого целевого транспортного средства ниже нижней предельной скорости транспортного средства. Также можно продолжать замедление замедляемого целевого транспортного средства, когда скорость транспортного средства для замедляемого целевого транспортного средства выше нижней предельной скорости транспортного средства. Как результат, скорость транспортного средства для замедляемого целевого транспортного средства может уменьшаться таким образом, что она является максимально возможно низкой в то время, когда не допускается падение скорости транспортного средства для замедляемого целевого транспортного средства ниже нижней предельной скорости транспортного средства.
[0116] Четвертый вариант осуществления
Далее приводится описание устройства управления движением транспортного средства (в дальнейшем может называться "четвертым устройством") согласно четвертому варианту осуществления изобретения. Четвертое устройство вычисляет радиус кривизны дороги, по которой движется рассматриваемое транспортное средство, на основе данных изображения (данных изображения дороги), полученных посредством устройства 17b камеры, и определяет нижнюю предельную скорость транспортного средства на основе радиуса кривизны.
[0117] Между прочим, радиус кривизны дороги, по которой рассматриваемое транспортное средство должно двигаться в будущем, может получаться (получаться заранее) на основе данных изображения дороги, полученных посредством устройства 17b камеры, когда дорога расположена впереди рассматриваемого транспортного средства и расположена в пределах указанного расстояния L от рассматриваемого транспортного средства. Соответственно, четвертое устройство изменяет состояние движения рассматриваемого транспортного средства на основе будущей скорости транспортного средства для рассматриваемого транспортного средства и радиуса кривизны дороги, по которой рассматриваемое транспортное средство должно двигаться в будущем.
[0118] Далее приводится описание характерного приведения в действие четвертого устройства на основе примеров, показанных на фиг. 10A-10D и фиг. 11A-11D. Следует отметить, что, на фиг. 10A-10D и фиг. 11A-11D, сплошные линии указывают "радиус кривизны, скорость транспортного средства и нижнюю предельную скорость транспортного средства" до текущего момента времени, пунктирные линии указывают "радиус кривизны и нижнюю предельную скорость транспортного средства дороги, по которой рассматриваемое транспортное средство должно двигаться в будущий момент времени", полученные посредством использования устройства 17b камеры, и штрихпунктирные линии с одной точкой указывают будущую скорость транспортного средства (прогнозную скорость транспортного средства) для рассматриваемого транспортного средства. Фиг. 10A-10D являются временными диаграммами, и приведение в действие четвертого устройства изменяется от фиг. 10A к фиг. 10B, фиг. 1°C и фиг. 10D с истечением времени. Аналогично, фиг. 11A-11D являются временными диаграммами, и приведение в действие четвертого устройства изменяется от фиг. 11A к фиг. 11B, фиг. 11C и фиг. 11D с истечением времени.
[0119] Пример 1
Как указано посредством пунктирной линии на фиг. 10A, в случае если будущий радиус кривизны, который может получаться в момент времени определения анормальности, является относительно большим, нижняя предельная скорость транспортного средства остается в качестве низкой скорости транспортного средства. Соответственно, как указано посредством штрихпунктирной линии с одной точкой, даже когда рассматриваемое транспортное средство замедляется с постоянным замедлением от момента времени определения анормальности, будущая скорость транспортного средства не становится ниже нижней предельной скорости транспортного средства. Таким образом, в этом случае, четвертое устройство начинает замедление рассматриваемого транспортного средства с постоянным замедлением от момента времени определения анормальности.
[0120] После этого, как показано на фиг. 10B, когда текущий момент времени становится моментом t1 времени, предполагается, что прогнозируется резкое уменьшение радиуса кривизны в определенный момент t3 времени в будущем и резкое увеличение нижней предельной скорости транспортного средства в качестве результата. В этом случае, скорость транспортного средства для рассматриваемого транспортного средства в момент t1 времени выше нижней предельной скорости транспортного средства в момент t3 времени. Тем не менее, в случае если рассматриваемое транспортное средство продолжает замедление с постоянным замедлением, прогнозируется то, что скорость транспортного средства становится ниже нижней предельной скорости транспортного средства в момент t3 времени. Соответственно, как показано на фиг. 10C, четвертое устройство временно прекращает замедление в момент t1 времени, в который выполнено такое прогнозирование, заставляет рассматриваемое транспортное средство двигаться с постоянной скоростью и в силу этого поддерживает скорость транспортного средства.
[0121] После этого, четвертое устройство прогнозирует то, что скорость транспортного средства не становится ниже нижней предельной скорости транспортного средства в будущем при замедлении рассматриваемого транспортного средства с постоянным замедлением (см. момент t2 времени на фиг. 10C). В это время, четвертое устройство начинает замедление рассматриваемого транспортного средства снова с постоянным замедлением. Как результат, как показано на фиг. 10D, скорость транспортного средства уменьшается без опускания ниже нижней предельной скорости транспортного средства и в конечном счете становится равной 0.
[0122] Пример 2
Как указано посредством пунктирной линии на фиг. 11A, в случае если будущий радиус кривизны, который может получаться в момент времени определения анормальности, является относительно большим, нижняя предельная скорость транспортного средства остается в качестве низкой скорости транспортного средства. Соответственно, как указано посредством штрихпунктирной линии с одной точкой, даже когда рассматриваемое транспортное средство замедляется с постоянным замедлением от момента времени определения анормальности, будущая скорость транспортного средства не становится ниже нижней предельной скорости транспортного средства. Таким образом, в этом случае, четвертое устройство начинает замедление рассматриваемого транспортного средства с постоянным замедлением от момента времени определения анормальности.
[0123] После этого, как показано на фиг. 11B, когда текущий момент времени становится моментом t1 времени, предполагается, что прогнозируется резкое уменьшение радиуса кривизны в определенный момент t3 времени в будущем и резкое увеличение нижней предельной скорости транспортного средства в качестве результата. В этом случае, скорость транспортного средства для рассматриваемого транспортного средства в момент t1 времени уже ниже нижней предельной скорости транспортного средства в момент t3 времени. Таким образом, в случае если рассматриваемое транспортное средство продолжает замедление с постоянным замедлением, прогнозируется то, что скорость транспортного средства естественно становится ниже нижней предельной скорости транспортного средства в момент t3 времени. Соответственно, как показано на фиг. 11C, четвертое устройство временно прекращает замедление в момент t1 времени, в который выполнено такое прогнозирование, и ускоряет рассматриваемое транспортное средство при указанном ускорении. Это указанное ускорение представляет собой ускорение, которое вычисляется таким образом, что скорость транспортного средства для рассматриваемого транспортного средства достигает более высокой скорости транспортного средства, чем нижняя предельная скорость транспортного средства, которая соответствует радиусу кривизны, соответствующему моменту t3 времени (значения, которое получается посредством суммирования постоянной скорости транспортного средства с нижней предельной скоростью транспортного средства) до того, как рассматриваемое транспортное средство достигает точки с радиусом кривизны. Затем, когда скорость транспортного средства для рассматриваемого транспортного средства достигает нижней предельной скорости транспортного средства в точке с радиусом кривизны, соответствующим моменту t3 времени, четвертое устройство заставляет рассматриваемое транспортное средство двигаться с постоянной скоростью (см. момент t2 времени).
[0124] После этого, четвертое устройство прогнозирует то, что скорость транспортного средства не становится ниже нижней предельной скорости транспортного средства в будущем при замедлении рассматриваемого транспортного средства с постоянным замедлением (см. момент t4 времени на фиг. 11C и фиг. 11D). В это время, четвертое устройство начинает замедление рассматриваемого транспортного средства снова с постоянным замедлением. Как результат, как показано на фиг. 11D, скорость транспортного средства уменьшается без опускания ниже нижней предельной скорости транспортного средства и в конечном счете становится равной 0.
[0125] Конкретное приведение в действие
Далее приводится описание конкретного приведения в действие CPU в ECU 10 согласно четвертому устройству. CPU выполняет процедуры, показанные на блок-схемах последовательности операций способа по фиг. 12, который заменяет фиг. 3, фиг. 4 и фиг. 5, каждый раз, когда истекает указанное время. Поскольку блок-схемы последовательности операций способа по фиг. 4 и фиг. 5 уже описаны, далее приводится описание приведения в действие (обработки замедления транспортного средства) на основе блок-схемы последовательности операций способа по фиг. 12.
[0126] В указанное время, CPU начинает обработку от этапа 1200 на фиг. 12, обработка переходит к этапу 1205, и CPU определяет то, равно или нет значение флага Xijo возникновения анормальности водителя 1. Если водитель не переходит в анормальное состояние неспособности к вождению после начала приведения в действие рассматриваемого транспортного средства этого времени, значение флага Xijo равно 0. В этом случае, CPU определяет "Нет" на этапе 1205, обработка непосредственно переходит к этапу 1295, и эта процедура сразу завершается. Таким образом, в этом случае, рассматриваемое транспортное средство принудительно не замедляется.
[0127] С другой стороны, если значение флага Xijo возникновения анормальности водителя равно 1 в момент времени, в который CPU выполняет обработку на этапе 1205, CPU определяет "Да" на этапе 1205, обработка переходит к этапу 1210, и CPU определяет то, выше или нет скорость SPD транспортного средства 0. Если скорость SPD транспортного средства равна 0, CPU определяет "Нет" на этапе 1210. Затем обработка непосредственно переходит к этапу 1295, и эта процедура сразу завершается.
[0128] С другой стороны, если скорость SPD транспортного средства выше 0, CPU определяет "Да" на этапе 1210, обработка переходит к этапу 1215, и CPU определяет то, равно или нет значение флага Xkasoku ускорения 0. Когда значение флага Xkasoku ускорения равно 1, флаг Xkasoku ускорения указывает то, что рассматриваемое транспортное средство ускоряется в момент времени определения анормальности и далее. Флаг Xkasoku ускорения задается равным 0 в вышеописанной начальной процедуре, задается равным 1 на этапе 1260, который описывается ниже, и дополнительно задается равным 0 на этапе 1270, который описывается ниже.
[0129] Здесь, если текущий момент времени находится сразу после момента времени определения анормальности, значение флага Xkasoku ускорения равно 0. Таким образом, CPU определяет "Да" на этапе 1215 и последовательно выполняет обработку от этапа 1220 до этапа 1225, которая описывается ниже. После этого обработка переходит к этапу 1230.
[0130] Этап 1220. На основе данных изображения дороги, полученных посредством устройства 17b камеры, CPU вычисляет и получает радиус R(x) кривизны дороги впереди дороги, по которой рассматриваемое транспортное средство движется в текущий момент времени (радиус кривизны позиции впереди текущей позиции рассматриваемого транспортного средства на указанное расстояние x). Следует отметить, что максимальное значение L указанного расстояния x представляет собой максимальное расстояние, при котором радиус кривизны может вычисляться на основе данных изображения дороги, полученных посредством устройства 17b камеры. Этап 1225. CPU определяет нижнюю предельную скорость SL(x) транспортного средства, которая соответствует радиусу R(x) кривизны позиции впереди на указанное расстояние x, посредством применения радиуса R(x) кривизны к таблице MapSL(R) поиска, показанной в блоке B3 по фиг. 12. Расстояние x равно или выше 0 и равно или меньше "L". Согласно этой таблице MapSL(R), нижняя предельная скорость SL(x) транспортного средства вычисляется таким образом, что она увеличивается по мере того, как уменьшается радиус R(x) кривизны.
[0131] Затем, обработка переходит к этапу 1230, и CPU определяет то, ниже или нет скорость SPD транспортного средства в текущий момент времени "нижней предельной скорости SL(L) транспортного средства в позиции впереди текущей позиции рассматриваемого транспортного средства на указанное расстояние L". Указанное расстояние L является максимальным значением вышеописанного указанного расстояния x. Если скорость SPD транспортного средства в текущий момент времени равна или выше нижней предельной скорости SL(L) транспортного средства, CPU определяет "Нет" на этапе 1230, и обработка переходит к этапу 1235. Затем CPU определяет то, становится или нет "скорость SPD(x) транспортного средства в позиции впереди текущей позиции рассматриваемого транспортного средства на указанное расстояние x (x представляет собой расстояние, которое равно или выше 0 и равно или меньше указанного расстояния L)" ниже нижней предельной скорости SL(x) транспортного средства в случае, если рассматриваемое транспортное средство замедляется с постоянным замедлением Dec. Таким образом, CPU определяет то, возникает или нет ситуация, показанная на фиг. 10B.
[0132] Если условие определения не устанавливается на этапе 1235, CPU определяет "Нет" на этапе 1235, обработка переходит к этапу 1240, и CPU замедляет рассматриваемое транспортное средство с постоянным замедлением Dec. С другой стороны, если условие определения этапа 1235 устанавливается, CPU определяет "Да" на этапе 1235, обработка переходит к этапу 1245, и CPU заставляет рассматриваемое транспортное средство двигаться с постоянной скоростью, с тем чтобы поддерживать текущую скорость транспортного средства (см. момент t1 времени на фиг. 10C).
[0133] После этого, если такое состояние продолжается, CPU определяет "Да" на всех этапах от этапа 1205 до этапа 1215, и обработка переходит к этапу 1230 через этап 1220 и этап 1225. В этот момент времени, скорость транспортного средства поддерживается постоянной. Соответственно, если дорога с меньшим радиусом кривизны не появляется, ситуация, когда условие определения этапа 1230 не устанавливается, продолжается, и за счет этого CPU продолжает определение "Нет" на этапе 1230. CPU в силу этого повторяет определение на этапе 1235. Таким образом, в момент t2 времени на фиг. 10C, CPU определяет "Нет" на этапе 1235, и обработка переходит к этапу 1240. Затем CPU начинает замедление рассматриваемого транспортного средства снова с постоянным замедлением Dec.
[0134] Между прочим, в момент времени, в который CPU выполняет обработку на этапе 1230, такой как момент t1 времени на фиг. 11B, предусмотрен случай, в котором скорость SPD транспортного средства в текущий момент времени становится ниже нижней предельной скорости SL(L) транспортного средства. В случае если рассматриваемое транспортное средство замедляется с постоянным замедлением Dec в это время, прогнозируется то, что скорость SPD транспортного средства (L) в позиции впереди текущей позиции рассматриваемого транспортного средства на указанное расстояние L естественно становится ниже нижней предельной скорости SL(L) транспортного средства. Соответственно, в этом случае, CPU определяет "Да" на этапе 1230 и последовательно выполняет обработку от этапа 1250 до этапа 1260, которая описывается ниже. Затем обработка переходит к этапу 1295, и эта процедура сразу завершается.
[0135] Этап 1250. CPU сохраняет нижнюю предельную скорость SL(L) транспортного средства, которая используется в качестве условия определения этапа 1230 (т.е. SL(L) нижней предельной скорости SL(x) транспортного средства, полученной на последнем этапе 1225), в качестве опорной целевой скорости SLm транспортного средства. Этап 1255. На основе скорости SPD транспортного средства и указанного расстояния L в момент времени, CPU вычисляет постоянное ускорение Ac, при котором скорость SPD транспортного средства (L) в то время, когда рассматриваемое транспортное средство движется на указанное расстояние L, может соответствовать "значению (SLm+ΔS), которое получается посредством суммирования указанной положительной скорости ΔS транспортного средства (допустимого запаса) с опорной целевой скоростью SLm транспортного средства", и ускоряет рассматриваемое транспортное средство при постоянном ускорении Ac. Этап 1260. CPU задает значение флага Xkasoku ускорения равным 1.
[0136] Если CPU начинает обработку от этапа 1200 снова в этом состоянии, CPU определяет "Да" на этапе 1205 и этапе 1210 и определяет "Нет" на следующем этапе 1215, и обработка переходит к этапу 1265. CPU определяет на этапе 1265 то, выше или нет скорость SPD транспортного средства в момент времени опорной целевой скорости SLm транспортного средства. Если скорость SPD транспортного средства в момент времени равна или меньше опорной целевой скорости SLm транспортного средства, CPU определяет "Нет" на этапе 1265. Затем обработка непосредственно переходит к этапу 1295, и эта процедура сразу завершается. Как результат этого, рассматриваемое транспортное средство продолжает ускорение при постоянном ускорении Ac.
[0137] Как результат ускорения рассматриваемого транспортного средства, как показано в момент t2 времени на фиг. 11C, если скорость SPD транспортного средства в момент времени становится выше опорной целевой скорости SLm транспортного средства, CPU определяет "Да" на этапе 1265. Затем обработка переходит к этапу 1270, и CPU задает значение флага Xkasoku ускорения равным 0.
[0138] Соответственно, при выполнении этой процедуры в следующий раз, CPU определяет "Да" на этапе 1215 и определяет "Нет" на этапе 1230. Затем обработка переходит к этапу 1235. Таким образом, CPU поддерживает постоянное движение посредством обработки на этапе 1245 до тех пор, пока CPU не определит то, что скорость SPD(x) транспортного средства не становится ниже нижней предельной скорости SL(x) транспортного средства в случае, если рассматриваемое транспортное средство замедляется с постоянным замедлением Dec. Если CPU определяет то, что скорость SPD(x) транспортного средства не становится ниже нижней предельной скорости SL(x) транспортного средства в случае, если рассматриваемое транспортное средство замедляется с постоянным замедлением Dec, замедление посредством обработки на этапе 1240 возобновляется.
[0139] Как описано выше, на основе данных изображения, полученных посредством устройства 17b камеры, четвертое устройство получает радиус кривизны (или кривизну=1/радиус кривизны) дороги в конкретной точке, которая находится впереди позиции транспортного средства в текущий момент времени на указанное расстояние L.
[0140] Затем в случае, если прогнозируется то, что скорость транспортного средства в то время, когда замедляемое целевое транспортное средство достигает конкретной точки, становится ниже нижней предельной скорости транспортного средства, которая задается на основе радиуса кривизны (или кривизны) конкретной точки (что включает в себя случай, в котором скорость транспортного средства в текущий момент времени ниже нижней предельной скорости транспортного средства в конкретной точке), когда замедляемое целевое транспортное средство продолжает замедление, четвертое устройство заставляет замедляемое целевое транспортное средство двигаться с постоянной скоростью или ускоряет замедляемое целевое транспортное средство, с тем чтобы поддерживать скорость транспортного средства для замедляемого целевого транспортного средства во время достижения конкретной точки равной или выше нижней предельной скорости транспортного средства.
[0141] Таким образом, даже когда информация картографической базы данных не может использоваться, даже когда информация картографической базы данных является старой информацией и т.п., четвертое устройство может постепенно уменьшать скорость транспортного средства для замедляемого целевого транспортного средства при недопущении значительного опускания скорости транспортного средства для замедляемого целевого транспортного средства ниже нижней предельной скорости транспортного средства.
[0142] Пятый вариант осуществления
Далее приводится описание устройства управления движением транспортного средства (в дальнейшем может называться "пятым устройством") согласно пятому варианту осуществления изобретения. При определении того, что водитель находится в анормальном состоянии неспособности к вождению, пятое устройство замедляет рассматриваемое транспортное средство с постоянным замедлением Dec, вычисляет радиус Rnow кривизны дороги в позиции, в которой рассматриваемое транспортное средство движется в текущий момент времени, на основе данных изображения дороги, полученных посредством устройства 17b камеры, и определяет нижнюю предельную скорость SLnow транспортного средства на основе радиуса Rnow кривизны.
[0143] Затем в случае, если скорость SPD транспортного средства становится равной или меньшей нижней предельной скорости SLnow транспортного средства к тому времени, когда рассматриваемое транспортное средство остановлено, пятое устройство временно прекращает замедление и поддерживает или увеличивает скорость транспортного средства. После этого, когда скорость SPD транспортного средства переводится в состояние выше нижней предельной скорости SLnow транспортного средства, пятое устройство замедляет рассматриваемое транспортное средство снова с постоянным замедлением Dec. Согласно этому, скорость транспортного средства для рассматриваемого транспортного средства также не опускается значительно ниже нижней предельной скорости транспортного средства. Таким образом, при распознавании рассматриваемого транспортного средства, водитель транспортного средства позади может замедляться или останавливаться без резкого торможения транспортного средства позади. Выше приведено общее представление приведения в действие пятого устройства.
[0144] Конкретное приведение в действие
Далее приводится описание конкретного приведения в действие CPU в ECU 10 согласно пятому устройству. CPU выполняет процедуры, показанные на блок-схемах последовательности операций способа по фиг. 13, который заменяет фиг. 3, фиг. 4 и фиг. 5, каждый раз, когда истекает указанное время. Поскольку блок-схемы последовательности операций способа по фиг. 4 и фиг. 5 уже описаны, далее приводится описание приведения в действие (обработки замедления транспортного средства) на основе блок-схемы последовательности операций способа по фиг. 13.
[0145] В указанное время, CPU начинает обработку от этапа 1300 на фиг. 13, обработка переходит к этапу 1310, и CPU определяет то, равно или нет значение флага Xijo возникновения анормальности водителя 1. Если значение флага Xijo не равно 1, CPU определяет "Нет" на этапе 1310, обработка непосредственно переходит к этапу 1395, и эта процедура сразу завершается. Таким образом, в этом случае, рассматриваемое транспортное средство принудительно не замедляется.
[0146] С другой стороны, если значение флага Xijo возникновения анормальности водителя равно 1 в момент времени, в который CPU выполняет обработку на этапе 1310, CPU определяет "Да" на этапе 1310, обработка переходит к этапу 1320, и CPU определяет то, выше или нет скорость SPD транспортного средства 0. Если скорость SPD транспортного средства равна 0, CPU определяет "Нет" на этапе 1320. Затем обработка непосредственно переходит к этапу 1395, и эта процедура сразу завершается.
[0147] С другой стороны, если скорость SPD транспортного средства выше 0, CPU определяет "Да" на этапе 1320 и последовательно выполняет обработку на этапе 1330 и этапе 1340, которая описывается ниже. После этого обработка переходит к этапу 1350.
[0148] Этап 1330. На основе данных изображения дороги, полученных посредством устройства 17b камеры CPU вычисляет и получает радиус Rnow кривизны дороги, по которой движется в текущий момент времени рассматриваемое транспортное средство. Этап 1340. CPU определяет нижнюю предельную скорость SLnow транспортного средства в текущий момент времени посредством применения радиуса Rnow кривизны к таблице MapSLnow(Rnow) поиска, показанной в блоке B2 по фиг. 13. Согласно этой таблице MapSLnow(Rnow), нижняя предельная скорость SLnow транспортного средства вычисляется таким образом, что она увеличивается по мере того, как уменьшается радиус Rnow кривизны.
[0149] Затем, обработка переходит к этапу 1350, и CPU определяет то, выше или нет скорость SPD транспортного средства в текущий момент времени нижней предельной скорости SLnow транспортного средства в текущий момент времени. Если скорость SPD транспортного средства в текущий момент времени выше нижней предельной скорости SLnow транспортного средства в текущий момент времени, CPU определяет "Да" на этапе 1350, обработка переходит к этапу 1360, и CPU замедляет рассматриваемое транспортное средство с постоянным замедлением Dec. После этого, обработка переходит к 1395, и эта процедура сразу завершается.
[0150] С другой стороны, если скорость SPD транспортного средства в текущий момент времени равна или меньше нижней предельной скорости SLnow транспортного средства в текущий момент времени, CPU определяет "Нет" на этапе 1350, обработка переходит к этапу 1370, и CPU временно прекращает замедление с постоянным замедлением Dec. Помимо этого, если скорость SPD транспортного средства в текущий момент времени равна нижней предельной скорости SLnow транспортного средства в текущий момент времени, CPU заставляет рассматриваемое транспортное средство двигаться с постоянной скоростью. Если скорость SPD транспортного средства в текущий момент времени ниже нижней предельной скорости SLnow транспортного средства в текущий момент времени, CPU ускоряет рассматриваемое транспортное средство при постоянном ускорении Acc до тех пор, пока скорость SPD транспортного средства для рассматриваемого транспортного средства не совпадет с нижней предельной скоростью SLnow транспортного средства. После этого, обработка переходит к этапу 1395, и эта процедура сразу завершается.
[0151] Как описано выше, на основе данных изображения, полученных посредством устройства 17b камеры, пятое устройство получает информацию относительно радиуса кривизны дороги в точке, в которой движется в "текущий момент времени" замедляемое целевое транспортное средство. Затем пятое устройство задает нижнюю предельную скорость транспортного средства равной большему значению по мере того как, уменьшается радиус кривизны, указываемый посредством информации относительно радиуса кривизны. Кроме того, в случае если скорость транспортного средства для замедляемого целевого транспортного средства в текущий момент времени выше нижней предельной скорости транспортного средства в точке, в которой движется в текущий момент времени замедляемое целевое транспортное средство, пятое устройство замедляет замедляемое целевое транспортное средство. В случае если скорость транспортного средства для замедляемого целевого транспортного средства в текущий момент времени равна нижней предельной скорости транспортного средства в точке, в которой движется в текущий момент времени замедляемое целевое транспортное средство, пятое устройство заставляет замедляемое целевое транспортное средство двигаться с постоянной скоростью. В случае если скорость транспортного средства для замедляемого целевого транспортного средства в текущий момент времени ниже нижней предельной скорости транспортного средства в точке, в которой движется в текущий момент времени замедляемое целевое транспортное средство, пятое устройство ускоряет замедляемое целевое транспортное средство или заставляет замедляемое целевое транспортное средство двигаться с постоянной скоростью.
[0152] Соответственно, даже когда информация картографической базы данных не может использоваться, даже когда информация картографической базы данных является старой информацией и т.п., пятое устройство может постепенно уменьшать скорость транспортного средства для замедляемого целевого транспортного средства при недопущении значительного опускания скорости транспортного средства для замедляемого целевого транспортного средства ниже нижней предельной скорости транспортного средства.
[0153] Модифицированный пример пятого варианта осуществления
Далее приводится описание устройства управления движением транспортного средства (в дальнейшем может называться "пятым устройством по модифицированному примеру") согласно модифицированному примеру пятого варианта осуществления изобретения. Пятое устройство по модифицированному примеру отличается от пятого устройства только в таком аспекте, что пятое устройство по модифицированному примеру корректирует нижнюю предельную скорость SLnow транспортного средства в соответствии с тем, существует или нет экран (придорожный экран) на дороге, по которой движется рассматриваемое транспортное средство, тем, плохая погода (дождливая или туманная) или нет, тем, сейчас ночь или нет, и тем, является или нет низкой высота рассматриваемого транспортного средства. Таким образом, описание в дальнейшем сосредоточено на этом отличающемся аспекте.
[0154] Конкретное приведение в действие
CPU ECU 10 помощи при вождении согласно пятому устройству по модифицированному примеру отличается от CPU согласно пятому устройству только в таком аспекте, что этап 1340 по фиг. 13 заменяется этапами 1405-1480, показанными на фиг. 14.
[0155] Таким образом, после того, как CPU получает радиус Rnow кривизны на этапе 1330, обработка переходит к этапу 1405 на фиг. 14, и CPU определяет опорное значение SLnowb нижней предельной скорости SLnow транспортного средства (опорную нижнюю предельную скорость транспортного средства) в текущий момент времени посредством применения радиуса Rnow кривизны дороги, по которой рассматриваемое транспортное средство движется в текущий момент времени, к таблице MapSLnowb(Rnow) поиска, показанной в блоке B2a по фиг. 14. Эта таблица MapSLnowb(Rnow) является идентичной таблице MapSLnow(Rnow). Согласно этому, опорная нижняя предельная скорость SLnowb транспортного средства вычисляется таким образом, что она увеличивается по мере того, как уменьшается радиус Rnow кривизны.
[0156] Затем, обработка переходит к этапу 1410, и CPU определяет то, равен или меньше либо нет радиус Rnow кривизны порогового значения Rnowth радиуса кривизны. Таким образом, CPU определяет то, движется или нет рассматриваемое транспортное средство на относительно круто искривленной дороге (крутой кривой) в текущий момент времени. Если радиус Rnow кривизны равен или меньше порогового значения Rnowth радиуса кривизны, CPU определяет "Да" на этапе 1410, обработка переходит к этапу 1415, и CPU определяет то, является или нет дорога, по которой рассматриваемое транспортное средство движется в текущий момент времени, искривленной вправо дорогой (правой кривой), и то, предоставляется или нет придорожный экран, к примеру, шумопоглощающий экран с правой стороны дороги, на основе данных изображения дороги. Если дорога, по которой рассматриваемое транспортное средство движется в текущий момент времени, является искривленной вправо дорогой (правой кривой), и придорожный экран предоставляется с правой стороны дороги, CPU определяет "Да" на этапе 1415, обработка переходит к этапу 1420, и CPU задает значение поправочного коэффициента kR равным "1+d1". Значение d1 является значением, которое больше 0 и меньше 1 (например, 0,1). После этого обработка переходит к этапу 1435.
[0157] С другой стороны, если условие определения этапа 1415 не устанавливается, обработка переходит от этапа 1415 к этапу 1425, и CPU определяет то, является или нет дорога, по которой рассматриваемое транспортное средство движется в текущий момент времени, искривленной влево дорогой (левой кривой), и то, предоставляется или нет придорожный экран, к примеру, шумопоглощающий экран, с левой стороны дороги, на основе данных изображения дороги. Если дорога, по которой рассматриваемое транспортное средство движется в текущий момент времени, является искривленной влево дорогой (левой кривой), и придорожный экран предоставляется с левой стороны дороги, CPU определяет "Да" на этапе 1425, обработка переходит к этапу 1427, и CPU задает значение поправочного коэффициента kL равным "1+d2". Значение d2 является значением, которое больше 0 и меньше 1 (например, 0,1). После этого обработка переходит к этапу 1435.
[0158] Кроме того, если условие определения этапа 1425 не устанавливается, обработка переходит от этапа 1425 к этапу 1430, и CPU задает каждый из поправочного коэффициента kR и поправочного коэффициента kL равным 1. После этого, обработка переходит к этапу 1435. Следует отметить, что если радиус Rnow кривизны не равен или меньше порогового значения Rnowth радиуса кривизны в момент времени, в который CPU выполняет обработку на этапе 1410, CPU определяет "Нет" на этапе 1410, и обработка переходит к этапу 1430 и затем переходит к этапу 1435. Соответственно, также в этом случае, каждый из поправочного коэффициента kR и поправочного коэффициента kL задается равным 1.
[0159] Когда обработка переходит к этапу 1435, CPU определяет то, дождливо и туманно или нет в текущий момент времени. Например, CPU определяет то, приводится или нет в действие стеклоочиститель, который не показан, рассматриваемого транспортного средства. Если стеклоочиститель приводится в действие, CPU определяет то, что погода в текущий момент времени является дождливой. Кроме того, например, CPU определяет то, зажигаются или нет противотуманные фары, которые не показаны, рассматриваемого транспортного средства. Если противотуманные фары зажигаются, CPU определяет то, что туманно в текущий момент времени. Следует отметить, что CPU может получать информацию относительно погоды (дождливо и туманно или нет и т.п.) области, в которой движется рассматриваемое транспортное средство, снаружи (например, из центра предоставления информации о погоде) посредством использования устройства связи с внешним миром, которое не показано, и может выполнять обработку на этапе 1435 на основе информации.
[0160] Если условие определения этапа 1435 устанавливается, обработка переходит к этапу 1440, и CPU задает значение поправочного коэффициента kW равным "1+d3". Значение d3 является значением, которое больше 0 и меньше 1 (например, 0,1). После этого, обработка переходит к этапу 1450. С другой стороны, если условие определения этапа 1435 не устанавливается, обработка переходит к этапу 1445, и CPU задает значение поправочного коэффициента kW равным 1. После этого обработка переходит к этапу 1450.
[0161] Когда обработка переходит к этапу 1450, CPU определяет то, ночь или нет в текущий момент времени. Например, CPU определяет то, зажигаются или нет передние фары, которые не показаны, рассматриваемого транспортного средства. Если передние фары зажигаются, CPU определяет то, что ночь в текущий момент времени. Следует отметить, что CPU может определять то, ночь или нет в текущий момент времени, посредством использования датчика освещенности, который не показан (например, см. патент (Япония) № 4465817).
[0162] Если условие определения этапа 1450 устанавливается, обработка переходит к этапу 1455, и CPU задает значение поправочного коэффициента kN равным "1+d4". Значение d4 является значением, которое больше 0 и меньше 1 (например, 0,1). После этого, обработка переходит к этапу 1465. С другой стороны, если условие определения этапа 1450 не устанавливается, обработка переходит к этапу 1460, и CPU задает значение поправочного коэффициента kN равным 1. После этого обработка переходит к этапу 1465.
[0163] Когда обработка переходит к этапу 1465, CPU считывает "высоту H транспортного средства для рассматриваемого транспортного средства", которая сохраняется в ROM ECU 10, и определяет то, равна или меньше либо нет высота H транспортного средства порогового значения Hth высоты транспортного средства. Если высота H транспортного средства равна или меньше порогового значения Hth высоты транспортного средства, обработка переходит к этапу 1470, и CPU задает значение поправочного коэффициента kH равным "1+d5". Значение d5 является значением, которое больше 0 и меньше 1 (например, 0,1). После этого, обработка переходит к этапу 1480. С другой стороны, если высота H транспортного средства выше порогового значения Hth высоты транспортного средства, обработка переходит к этапу 1475, и CPU задает значение поправочного коэффициента kH равным 1. После этого обработка переходит к этапу 1480.
[0164] Когда обработка переходит к этапу 1480, CPU умножает опорную нижнюю предельную скорость SLnowb транспортного средства на поправочные коэффициенты kR, kL, kW, kN и kH в соответствии со следующим уравнением (1) и за счет этого корректирует опорную нижнюю предельную скорость SLnowb транспортного средства, чтобы вычислять нижнюю предельную скорость SLnow транспортного средства. Затем обработка переходит к этапу 1350 на фиг. 13. Нижняя предельная скорость транспортного средства SLnow=kR*kL*kW*kN*kH*SLnowb...(1)
[0165] Согласно этому пятому устройству по модифицированному примеру, нижняя предельная скорость SLnow транспортного средства корректируется таким образом, что она увеличивается в случае, если рассматриваемое транспортное средство с меньшей вероятностью распознается водителем транспортного средства позади (в случае плохой видимости), к примеру, в случае, если придорожный экран существует на стороне, в которую рассматриваемое транспортное средство поворачивает на искривленной дороге, в случае плохой погоды, в случае ночи или в случае, если высота H транспортного средства для рассматриваемого транспортного средства является низкой. Как результат, вероятность того, что водитель транспортного средства позади должен резко тормозить транспортное средство позади при распознавании рассматриваемого транспортного средства, дополнительно может надежно уменьшаться. Следует отметить, что значения d1, d2, d3, d4 и d5 могут отличаться или быть идентичными.
[0166] Шестой вариант осуществления
Далее приводится описание устройства управления движением транспортного средства (в дальнейшем может называться "шестым устройством") согласно шестому варианту осуществления изобретения. При определении того, что водитель находится в анормальном состоянии неспособности к вождению, шестое устройство замедляет рассматриваемое транспортное средство с постоянным замедлением Dec и получает текущую позицию Pnow рассматриваемого транспортного средства и позицию Ptg перегиба дороги, по которой в данный момент движется рассматриваемое транспортное средство (точку, в которой уклон изменяется с подъема на спуск), из приемного GPS-устройства 21 и картографической базы 22 данных через навигационный ECU 20.
[0167] Когда транспортное средство движется на дороге с подъемом перед точкой перегиба, водитель транспортного средства испытывает затруднение в визуальном распознавании ситуации впереди точки перегиба. Таким образом, водитель имеет плохую видимость перед перегибом, к примеру, на искривленной дороге. Соответственно, в случае если транспортное средство, водитель которого определен как находящийся в анормальном состоянии неспособности к вождению (замедляемое целевое транспортное средство), и которое в результате принудительно замедлено, движется с чрезмерно низкой скоростью транспортного средства в точке впереди точки перегиба, водитель транспортного средства позади должен резко тормозить транспортное средство позади после того, как транспортное средство позади проезжает через точку перегиба, и водитель транспортного средства позади распознает транспортное средство. Кроме того, время, когда водитель транспортного средства позади первого распознает замедляемое целевое транспортное средство, которое проезжает через перегиб, задерживается больше по мере того, как увеличивается разность между уклоном дороги непосредственно перед перегибом и уклоном дороги сразу после перегиба (величина изменения уклона).
[0168] На основе такой точки зрения, шестое устройство получает величину изменения уклона перегиба, через который проехало замедляемое целевое транспортное средство, из картографической базы 22 данных через навигационный ECU 20 и задает нижнюю предельную скорость транспортного средства на основе величины изменения уклона. Кроме того, шестое устройство вычисляет расстояние D, на которое замедляемое целевое транспортное средство движется после проезда через точку перегиба, и корректирует таким образом, чтобы увеличивать нижнюю предельную скорость транспортного средства по мере того, как уменьшается расстояние D.
[0169] Затем в случае, если скорость SPD транспортного средства становится равной или меньшей нижней предельной скорости SPDmin транспортного средства, шестое устройство временно прекращает замедление, чтобы заставлять транспортное средство двигаться с постоянной скоростью (т.е. поддерживает скорость транспортного средства), или ускоряет рассматриваемое транспортное средство при постоянном ускорении до тех пор, пока скорость транспортного средства не совпадет с нижней предельной скоростью SPDmin транспортного средства. Таким образом, в случае если водитель транспортного средства позади распознает замедляемое целевое транспортное средство, когда транспортное средство позади проезжает через точку перегиба, водитель транспортного средства позади может замедлять или останавливать транспортное средство позади без резкого торможения транспортного средства позади. Выше приведено общее представление приведения в действие шестого устройства.
[0170] Конкретное приведение в действие
Далее приводится описание конкретного приведения в действие CPU в ECU 10 согласно шестому устройству. CPU выполняет процедуры, показанные на блок-схемах последовательности операций способа по фиг. 15, который заменяет фиг. 3, фиг. 4 и фиг. 5, каждый раз, когда истекает указанное время. Поскольку блок-схемы последовательности операций способа по фиг. 4 и фиг. 5 уже описаны, далее приводится описание приведения в действие (обработки замедления транспортного средства) на основе блок-схемы последовательности операций способа по фиг. 15.
[0171] В указанное время, CPU начинает обработку от этапа 1500 на фиг. 15, обработка переходит к этапу 1510, и CPU определяет то, равно или нет значение флага Xijo возникновения анормальности водителя 1. Если значение флага Xijo не равно 1, CPU определяет "Нет" на этапе 1510, обработка непосредственно переходит к этапу 1595, и эта процедура сразу завершается. Таким образом, в этом случае, рассматриваемое транспортное средство принудительно не замедляется.
[0172] С другой стороны, если значение флага Xijo возникновения анормальности водителя равно 1 в момент времени, в который CPU выполняет обработку на этапе 1510, CPU определяет "Да" на 1510, обработка переходит к этапу 1520, и CPU определяет то, выше или нет скорость SPD транспортного средства 0. Если скорость SPD транспортного средства равна 0, CPU определяет "Нет" на этапе 1520. Затем обработка непосредственно переходит к этапу 1595, и эта процедура сразу завершается.
[0173] С другой стороны, если скорость SPD транспортного средства выше 0, CPU определяет "Да" на этапе 1520, и обработка переходит к этапу 1530. CPU получает позицию Pnow рассматриваемого транспортного средства в текущий момент времени, позицию Pold рассматриваемого транспортного средства до указанного времени и позицию Ptg перегиба дороги, по которой в данный момент движется рассматриваемое транспортное средство, из навигационного ECU 20. Затем, на основе означенного, CPU определяет то, проезжает или нет рассматриваемое транспортное средство через позицию Ptg перегиба дороги. Если рассматриваемое транспортное средство не проезжает через позицию Ptg перегиба дороги, CPU определяет "Нет" на этапе 1530. Затем обработка непосредственно переходит к этапу 1595, и эта процедура сразу завершается.
[0174] С другой стороны, если рассматриваемое транспортное средство проезжает через позицию Ptg перегиба дороги, CPU определяет "Да" на этапе 1530 и последовательно выполняет обработку от этапа 1535 до этапа 1570, которая описывается ниже, и обработка переходит к этапу 1580. Следует отметить, что в случае, если CPU выполняет обработку на этапе 1530 сразу после того, как рассматриваемое транспортное средство проезжает через позицию Ptg перегиба дороги, CPU задает проезжаемое расстояние D, которое описывается ниже, равным 0.
[0175] Этап 1535. CPU получает уклон Ib дороги (Ib>0) непосредственно перед позицией Ptg перегиба и уклон Ia дороги (Ia<0) сразу после позиции Ptg перегиба из картографической базы 22 данных через навигационный ECU 20 и получает разность между ними (т.е. величину изменения уклона) dI (=Ib-Ia). Этап 1540. CPU определяет опорную нижнюю предельную скорость SPDminb транспортного средства посредством применения величины dI изменения уклона к таблице MapSPDminb(dI) поиска, показанной в блоке B4 по фиг. 15. Согласно этой таблице MapSPDminb(dI), опорная нижняя предельная скорость SPDminb транспортного средства вычисляется таким образом, что она увеличивается по мере того, как увеличивается величина dI изменения уклона.
[0176] Этап 1550. На основе позиции Ptg перегиба и позиции Pnow рассматриваемого транспортного средства, CPU получает расстояние D (проезжаемое расстояние), на которое рассматриваемое транспортное средство движется из позиции Ptg перегиба. Этап 1560. CPU определяет поправочный коэффициент kd посредством применения проезжаемого расстояния D к таблице Mapkd(D) поиска, показанной в блоке B5 по фиг. 15. Согласно этой таблице Mapkd(D), поправочный коэффициент kd вычисляется таким образом, что он уменьшается по мере того, как увеличивается проезжаемое расстояние D. Поправочный коэффициент kd становится равным 0, когда проезжаемое расстояние становится равным или большим порогового расстояния. Этап 1570. CPU получает нижнюю предельную скорость SPDmin транспортного средства посредством умножения опорной нижней предельной скорости SPDminb транспортного средства на поправочный коэффициент kd.
[0177] Затем, обработка переходит к этапу 1580, и CPU определяет то, выше или нет скорость SPD транспортного средства в текущий момент времени нижней предельной скорости SPDmin транспортного средства. Если скорость SPD транспортного средства в текущий момент времени выше нижней предельной скорости SPDmin транспортного средства, CPU определяет "Да" на этапе 1580, обработка переходит к 1585, и CPU замедляет рассматриваемое транспортное средство с постоянным замедлением Dec. После этого, обработка переходит к этапу 1595, и эта процедура сразу завершается.
[0178] С другой стороны, если скорость SPD транспортного средства в текущий момент времени равна или меньше нижней предельной скорости SPDmin транспортного средства, CPU определяет "Нет" на этапе 1580, обработка переходит к этапу 1590, и CPU временно прекращает замедление с постоянным замедлением Dec. Помимо этого, если скорость SPD транспортного средства в текущий момент времени равна нижней предельной скорости SPDmin транспортного средства, CPU заставляет рассматриваемое транспортное средство двигаться с постоянной скоростью. Если скорость SPD транспортного средства в текущий момент времени ниже нижней предельной скорости SPDmin транспортного средства, CPU ускоряет рассматриваемое транспортное средство при постоянном ускорении Acc до тех пор, пока скорость SPD транспортного средства для рассматриваемого транспортного средства не совпадет с нижней предельной скоростью SPDmin транспортного средства. После этого, обработка переходит к этапу 1595, и эта процедура сразу завершается.
[0179] Как описано выше, шестое устройство получает информацию относительно величины изменения уклона (Ia, Ib) дороги, на которой движется замедляемое целевое транспортное средство, в качестве информации относительно формы дороги и задает нижнюю предельную скорость транспортного средства равной большему значению по мере того, как увеличивается величина (dI) изменения уклона в точке перегиба, которая указывается посредством информации относительно величины изменения уклона. Затем шестое устройство управляет скоростью транспортного средства для замедляемого целевого транспортного средства таким образом, что скорость транспортного средства для замедляемого целевого транспортного средства не становится ниже нижней предельной скорости транспортного средства. Кроме того, шестое устройство увеличивает нижнюю предельную скорость транспортного средства по мере того, как уменьшается проезжаемое расстояние замедляемого целевого транспортного средства из точки перегиба.
[0180] В случае если замедляемое целевое транспортное средство движется посредством проезда через перегиб, в котором уклон дороги изменяется с подъема на спуск, время, когда водитель транспортного средства позади распознает замедляемое целевое транспортное средство, задерживается больше по мере того, как увеличивается величина изменения уклона до и после перегиба. Соответственно, когда нижняя предельная скорость транспортного средства задается на основе величины изменения уклона, как указано посредством шестого устройства, может уменьшаться "вероятность того, что водитель транспортного средства позади должен резко тормозить транспортное средство позади" вследствие замедляемого целевого транспортного средства.
[0181] Следует отметить, что, аналогично первому устройству в третьему устройству, шестое устройство может обрабатывать нижнюю предельную скорость транспортного средства, которая увеличивается сразу после того, как замедляемое целевое транспортное средство проезжает через точку перегиба, аналогично нижней предельной скорости транспортного средства на основе радиуса кривизны. Таким образом, первое-третье устройство может обрабатывать более высокую из нижней предельной скорости транспортного средства, которая основана на радиусе кривизны и учитывается в силу означенного, и нижней предельной скорости транспортного средства, которая увеличивается сразу после того, как замедляемое целевое транспортное средство проезжает через точку перегиба, в качестве нижней предельной скорости транспортного средства. Кроме того, в случае если установлен датчик ускорения, который может определять наклон рассматриваемого транспортного средства, шестое устройство может определять то, проезжает или нет рассматриваемое транспортное средство через точку перегиба, на основе значения определения датчика ускорения. Кроме того, шестое устройство может вычислять вышеуказанное расстояние D посредством "интегрирования скорости SPD транспортного средства, полученной из датчика 16 скорости транспортного средства".
[0182] Седьмой вариант осуществления
Далее приводится описание устройства управления движением транспортного средства (в дальнейшем может называться "седьмым устройством") согласно седьмому варианту осуществления изобретения. Седьмое устройство отличается от первого устройства только в таком аспекте, что седьмое устройство выполняет определение анормальности водителя посредством использования кнопки 90 подтверждения. Описание в дальнейшем сосредоточено на этом отличающемся аспекте. Следует отметить, что способ определения анормальности водителя седьмого устройства также может применяться к другим устройствам управления движением транспортного средства, таким как второе-шестое устройства.
[0183] Конкретное приведение в действие
CPU ECU 10 согласно седьмому устройству выполняет процедуру, показанную на блок-схеме последовательности операций способа по фиг. 16, каждый раз, когда истекает указанное время. Соответственно, в указанное время, CPU начинает обработку от этапа 1600 по фиг. 16, обработка переходит к этапу 1610, и CPU определяет то, равно или нет значение флага Xijo возникновения анормальности водителя 0. Как описано выше, значение флага Xijo задается равным 0 в начальной процедуре.
[0184] Если значение флага Xijo возникновения анормальности водителя равно 1, CPU определяет "Нет" на этапе 1610, обработка непосредственно переходит к этапу 1695, и эта процедура сразу завершается.
[0185] С другой стороны, если значение флага Xijo возникновения анормальности водителя равно 0, CPU определяет "Да" на этапе 1610, обработка переходит к этапу 1620, и CPU определяет то, истекло или нет первое время от момента времени, в который выполняется приведение в действие для инструктирования операции нажатия кнопки 90 подтверждения (инструктируемого момента времени). Если первое время не истекло от инструктируемого момента времени, CPU определяет "Нет" на этапе 1620. Затем обработка непосредственно переходит к этапу 1695, и эта процедура сразу завершается.
[0186] С другой стороны, если первое время истекло от инструктируемого момента времени, CPU определяет "Да" на этапе 1620, обработка переходит к этапу 1630, и CPU инструктирует операцию нажатия кнопки 90 подтверждения. Более конкретно, посредством использования ECU 80 выдачи аварийных сигналов, CPU отображает сообщение относительно такого намерения "Нажмите кнопку 90 подтверждения" на индикаторе 82 и издает прерывистый звук зуммера 81. Таким образом, если водитель не переходит в анормальное состояние неспособности к вождению, водитель обычно управляет (нажимает, т.е. включает) кнопку 90 подтверждения.
[0187] Затем, обработка переходит к этапу 1640, и CPU определяет то, нажата или нет кнопка 90 подтверждения. Если кнопка 90 подтверждения нажата, CPU определяет "Да" на этапе 1640, обработка переходит к этапу 1650, и CPU задает (очищает) значение счетчика Cnt до 0. Затем обработка переходит к этапу 1695, и эта процедура сразу завершается.
[0188] С другой стороны, если кнопка 90 подтверждения не нажата в момент времени, в который CPU выполняет обработку на этапе 1640, CPU определяет "Нет" на этапе 1640, обработка переходит к этапу 1660, и CPU определяет то, истекло или нет второе время от момента времени, в который CPU инструктирует операцию нажатия кнопки 90 подтверждения (т.е. момента времени, в который обработка на этапе 1630 выполняется). Второе время задается в качестве меньшего времени, чем первое время.
[0189] Если второе время не истекло от момента времени, в который CPU инструктирует операцию нажатия кнопки 90 подтверждения, CPU определяет "Нет" на этапе 1660, и обработка возвращается к этапу 1640. Соответственно, CPU отслеживает то, нажата или нет кнопка 90 подтверждения в период от момента времени, в который CPU инструктирует операцию нажатия кнопки 90 подтверждения, до истечения второго времени.
[0190] Если кнопка 90 подтверждения не нажата в период от момента времени, в который CPU инструктирует операцию нажатия кнопки 90 подтверждения, до истечения второго времени, когда CPU определяет "Да" на этапе 1660, обработка переходит к этапу 1670, и CPU увеличивает значение счетчика Cnt на 1. Следует отметить, что CPU временно прекращает инструктирование операции нажатия кнопки 90 подтверждения в это время.
[0191] Затем, обработка переходит к этапу 1680, и CPU определяет то, равно или выше либо нет значение счетчика Cnt порогового значения Cnth, которое соответствует пороговому времени. Если значение счетчика Cnt меньше порогового значения Cnth, CPU определяет "Нет" на этапе 1680. Затем обработка непосредственно переходит к этапу 1695, и эта процедура сразу завершается. В этом случае, когда первое время истекает, CPU выполняет обработку на этапе 1630 и далее снова.
[0192] Как описано выше, в случае если водитель переходит в анормальное состояние неспособности к вождению, кнопка 90 подтверждения не нажимается, даже когда операция нажатия кнопки 90 подтверждения инструктируется каждый раз, когда первое время истекает. Как результат, значение счетчика Cnt увеличивается на этапе 1670 и становится равным или превышающим пороговое значение Cnth. В этом случае, CPU определяет "Да" на этапе 1680, обработка переходит к этапу 1690, и CPU задает значение флага Xijo возникновения анормальности водителя равным 1. Другими словами, CPU подтверждает такое определение, что водитель находится в анормальном состоянии неспособности к вождению.
[0193] Далее, обработка переходит к этапу 1692, и CPU запрещает переопределение ускорения. Таким образом, CPU запрещает ускорение (включающее в себя замедление) транспортного средства на основе изменения рабочей величины AP нажатия педали акселератора (отключает запрос на ускорение на основе операции нажатия педали акселератора) в этот момент времени (в момент времени определения анормальности) и далее. После этого, обработка переходит к этапу 1695, и эта процедура сразу завершается.
[0194] Как описано выше, устройство управления движением транспортного средства согласно каждому из вариантов осуществления и модифицированному примеру изобретения замедляет замедляемое целевое транспортное средство таким образом, что скорость транспортного средства этого не опускается ниже нижней предельной скорости транспортного средства, и нижняя предельная скорость транспортного средства задается на основе формы дороги, которая оказывает влияние на время (задерживает время), в которое водитель транспортного средства позади замедляемого целевого транспортного средства визуально распознает замедляемое целевое транспортное средство. Таким образом, может уменьшаться вероятность того, что водитель транспортного средства позади должен резко тормозить транспортное средство позади вследствие замедляемого целевого транспортного средства. Помимо этого, вышеописанные варианты осуществления могут комбинироваться в пределах объема, который не формирует расхождения.
[0195] Изобретение не ограничено вышеописанными вариантами осуществления, и модифицированный пример и различные модификации могут приспосабливаться для него в пределах объема изобретения. Например, в качестве средства определения анормальности, которое выполняет определение анормальности водителя (обработку определения того, задается или нет значение флага Xijo возникновения анормальности водителя равным 1), может приспосабливаться так называемая "технология мониторинга состояния водителя", раскрытая в JP 2013-152700 А. Более конкретно, изображение водителя захватывается посредством использования камеры, которая предоставляется на элементе (например, на руле, стойке и т.п.) в салоне транспортного средства, и направление взгляда или направление лица водителя отслеживается посредством использования захваченного изображения. Затем в случае, если направление взгляда или направление водителя лица продолжает соответствовать направлению, в котором взгляд или лицо водителя не обращены в течение длительного времени в нормальном режиме работы транспортного средства в течение времени, которое равно или выше указанного времени, определение того, что водитель находится в анормальном состоянии неспособности к вождению, может подтверждаться, и значение флага Xijo может задаваться равным 1.
[0196] Кроме того, картографическая база 22 данных может монтироваться в объекте за пределами транспортного средства (в пункте регулирования движения) и т.п. В этом случае, каждое из устройств управления движением транспортного средства согласно вариантам осуществления изобретения может получать информацию относительно формы дороги (радиус кривизны, уклон дороги и т.п.) посредством использования устройства связи, которое не показано.
[0197] Кроме того, из устройств управления движением транспортного средства согласно вариантам осуществления изобретения, устройство, которое получает информацию относительно формы дороги из картографической базы 22 данных, может непосредственно получать "нижнюю предельную скорость транспортного средства, соответствующую форме дороги", которая задается в расчете на участок дороги заранее, из картографической базы 22 данных вместо информации относительно формы дороги.
[0198] Устройства управления движением транспортного средства согласно вариантам осуществления изобретения могут выполнять определение анормальности водителя только тогда, когда как управление помощью в удержании на полосе движения, так и адаптивное оптимальное регулирование скорости выполняется через операцию управления рабочим переключателем 18 водителем. Следует отметить, что адаптивное оптимальное регулирование скорости представляет собой управление, которое заставляет рассматриваемое транспортное средство следовать за едущим впереди транспортным средством при поддержании расстояния между транспортными средствами между едущим впереди транспортным средством, которое движется непосредственно впереди рассматриваемого транспортного средства, и рассматриваемым транспортным средством равным указанному расстоянию на основе информации целевых объектов, полученной посредством радарного датчика 17a и устройства 17b камеры. Поскольку непосредственно адаптивное оптимальное регулирование скорости известно, его описание не приводится (например, см. публикацию заявки на патент (Япония) номер 2014-148293 (JP 2014-148293 А), публикацию заявки на патент (Япония) номер 2006-315491 (JP 2006-315491 А), подробное описание патента (Япония) № 4172434, подробное описание патента (Япония) № 4929777 и т.п.).
[0199] Пример способа определения анормальности водителя в случае, если выполняется как управление помощью в удержании на полосе движения, так и адаптивное оптимальное регулирование скорости, заключается в следующем. Например, когда операция, в которой не обеспечивается маневрирование с рулем, и в силу этого крутящий момент Tra поворота при рулении является нулевым (0), продолжается в течение первого указанного времени (Tath: например, пяти секунд), устройство управления движением транспортного средства ориентировочно определяет то, что водитель возможно переходит в анормальное состояние неспособности к вождению. В это время, устройство управления движением транспортного средства начинает замедление рассматриваемого транспортного средства при чрезвычайно низком замедлении из этого состояния. Затем когда состояние, в котором ни рабочая величина AP нажатия педали акселератора, ни крутящий момент Tra поворота при рулении не изменяются в силу этого, продолжается в течение второго указанного времени (Tbth: например, от 30 секунд до 1 минуты), устройство управления движением транспортного средства подтверждает определение того, что водитель переходит в анормальное состояние неспособности к вождению.
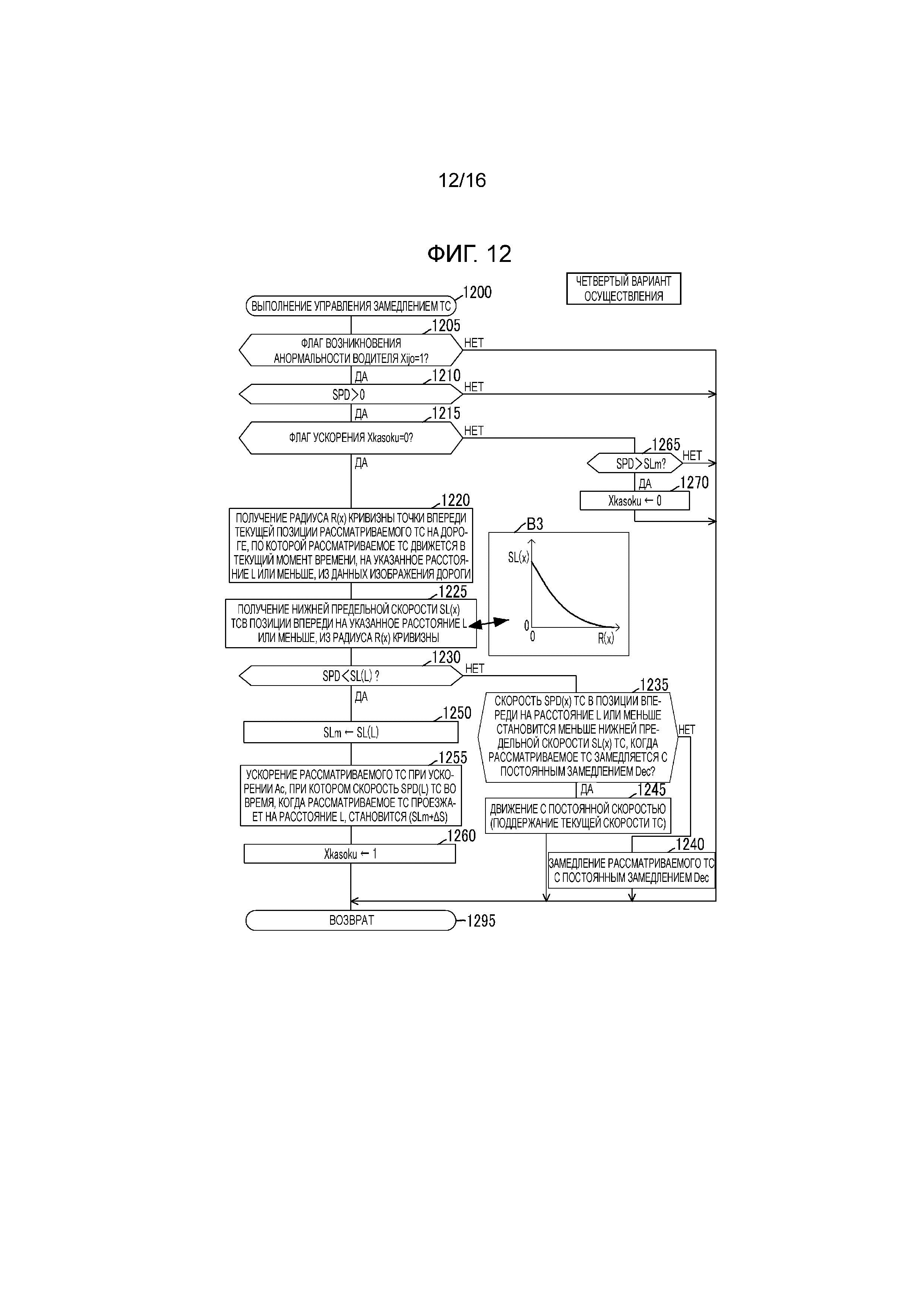
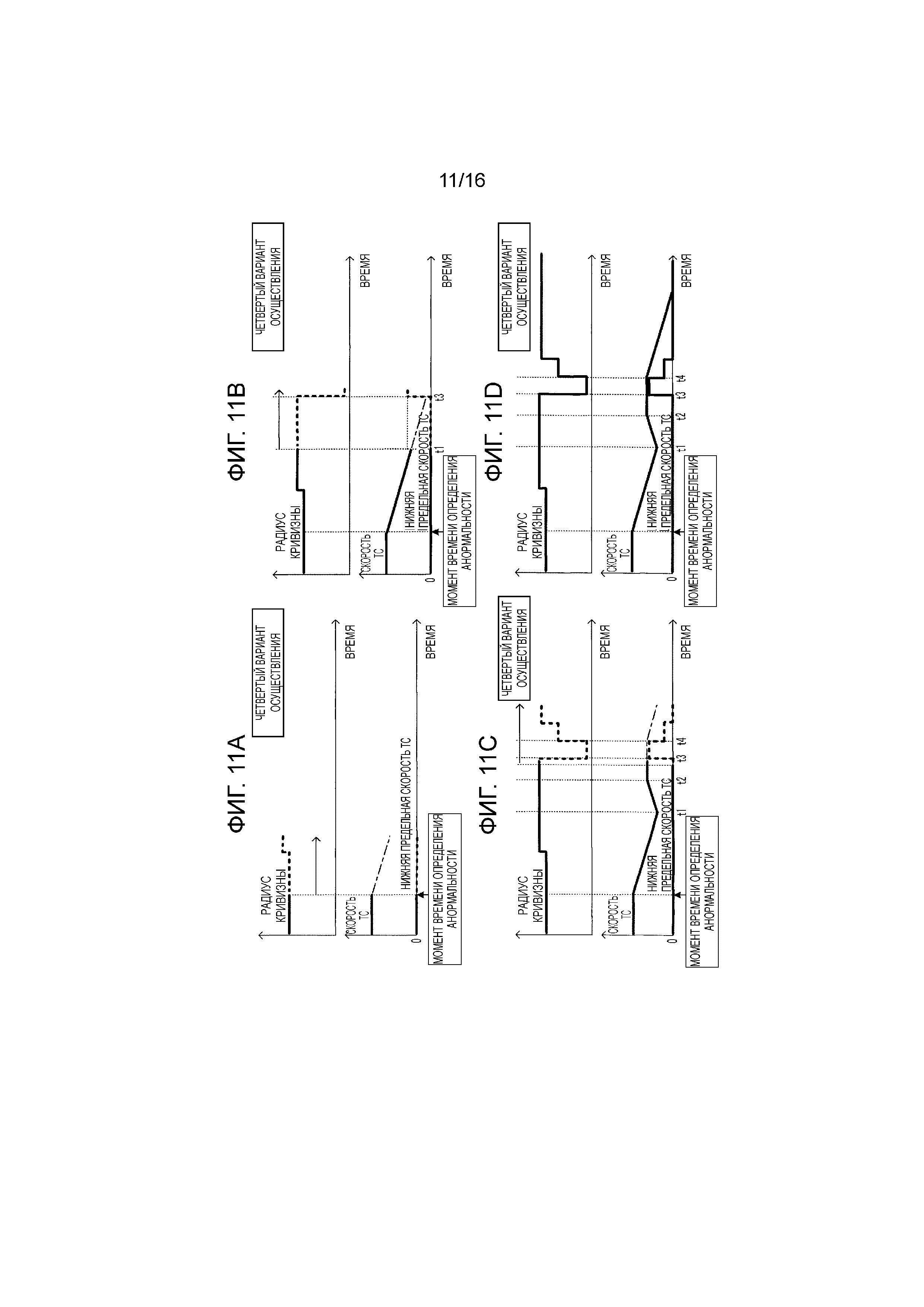
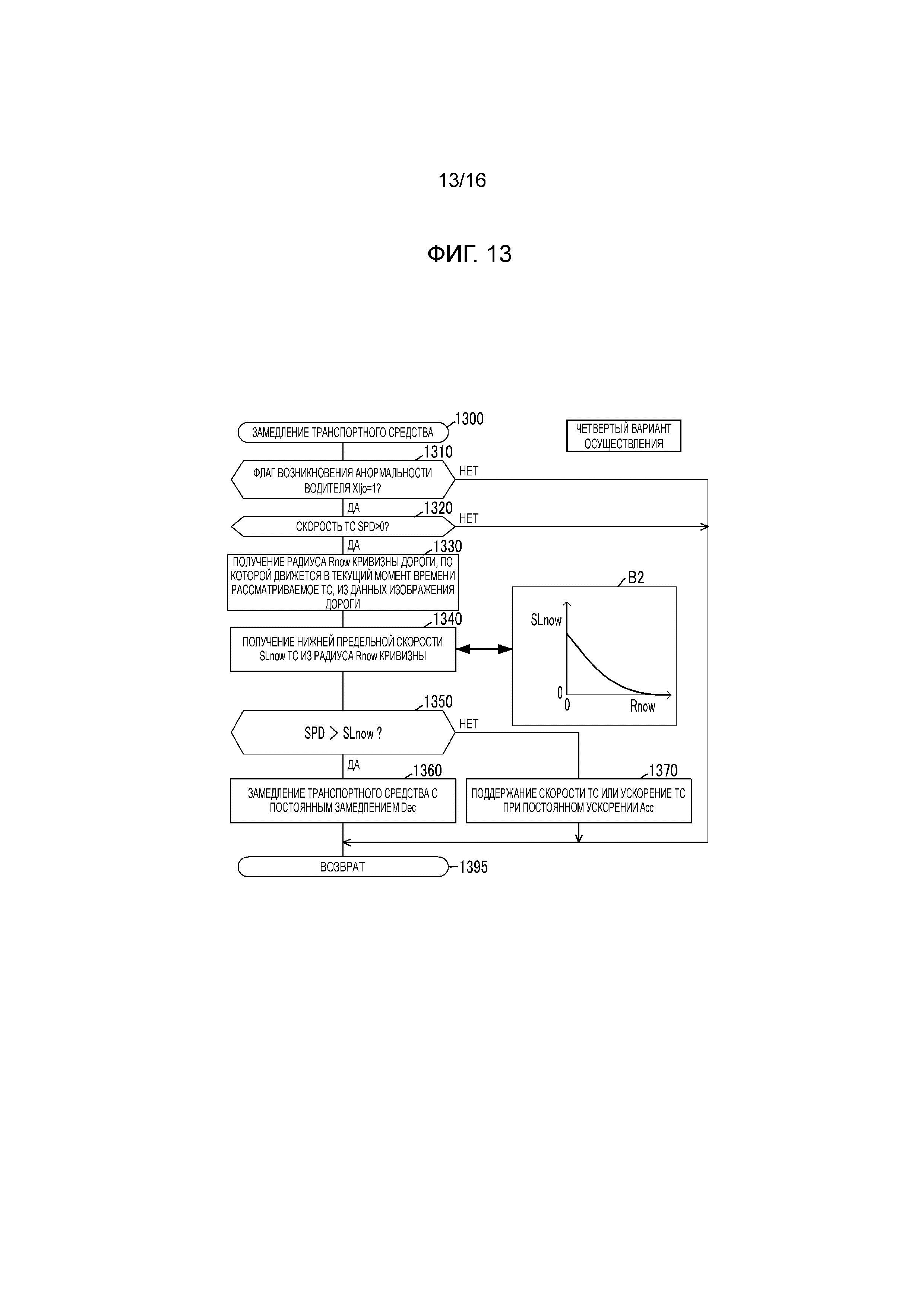
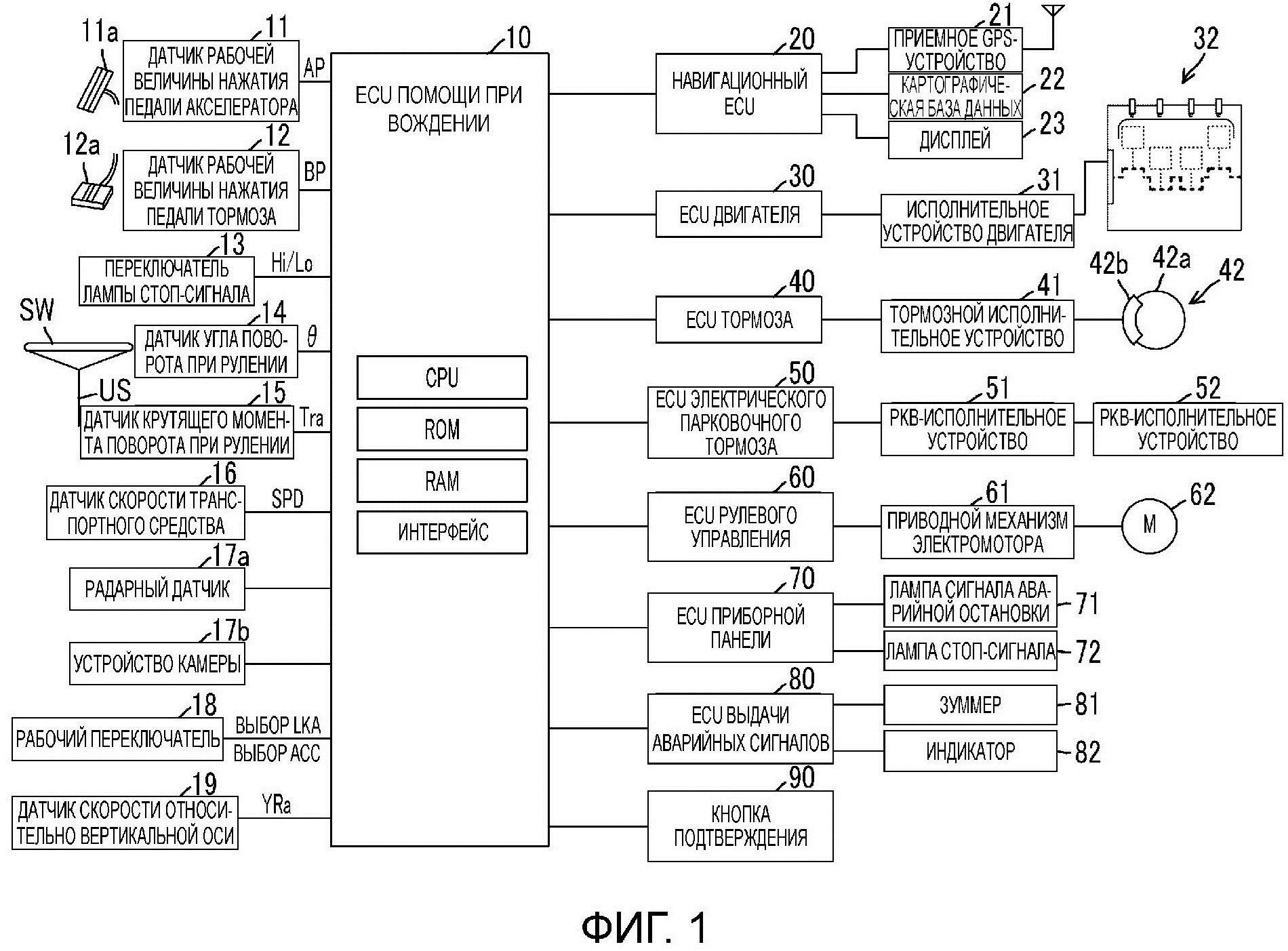
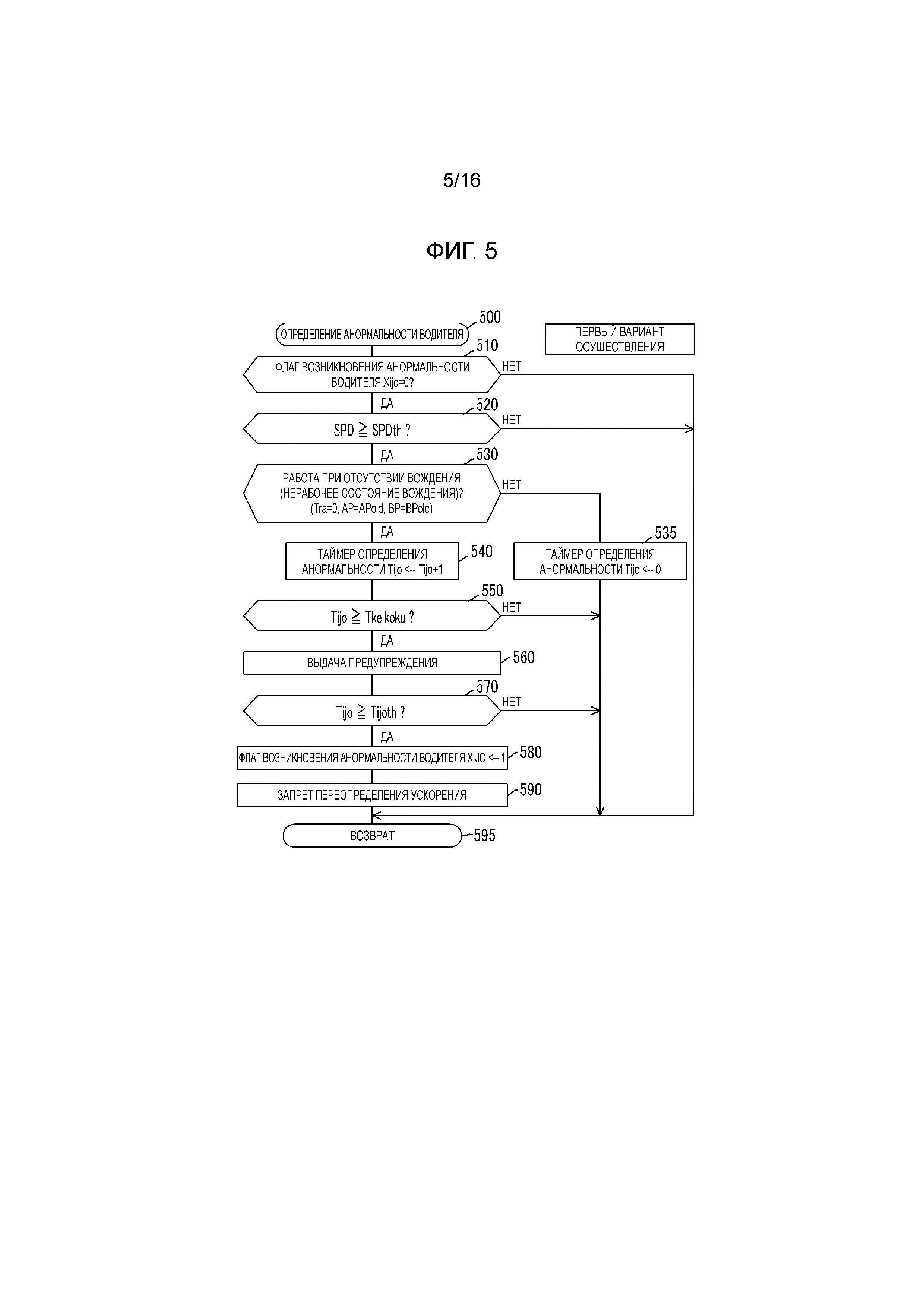
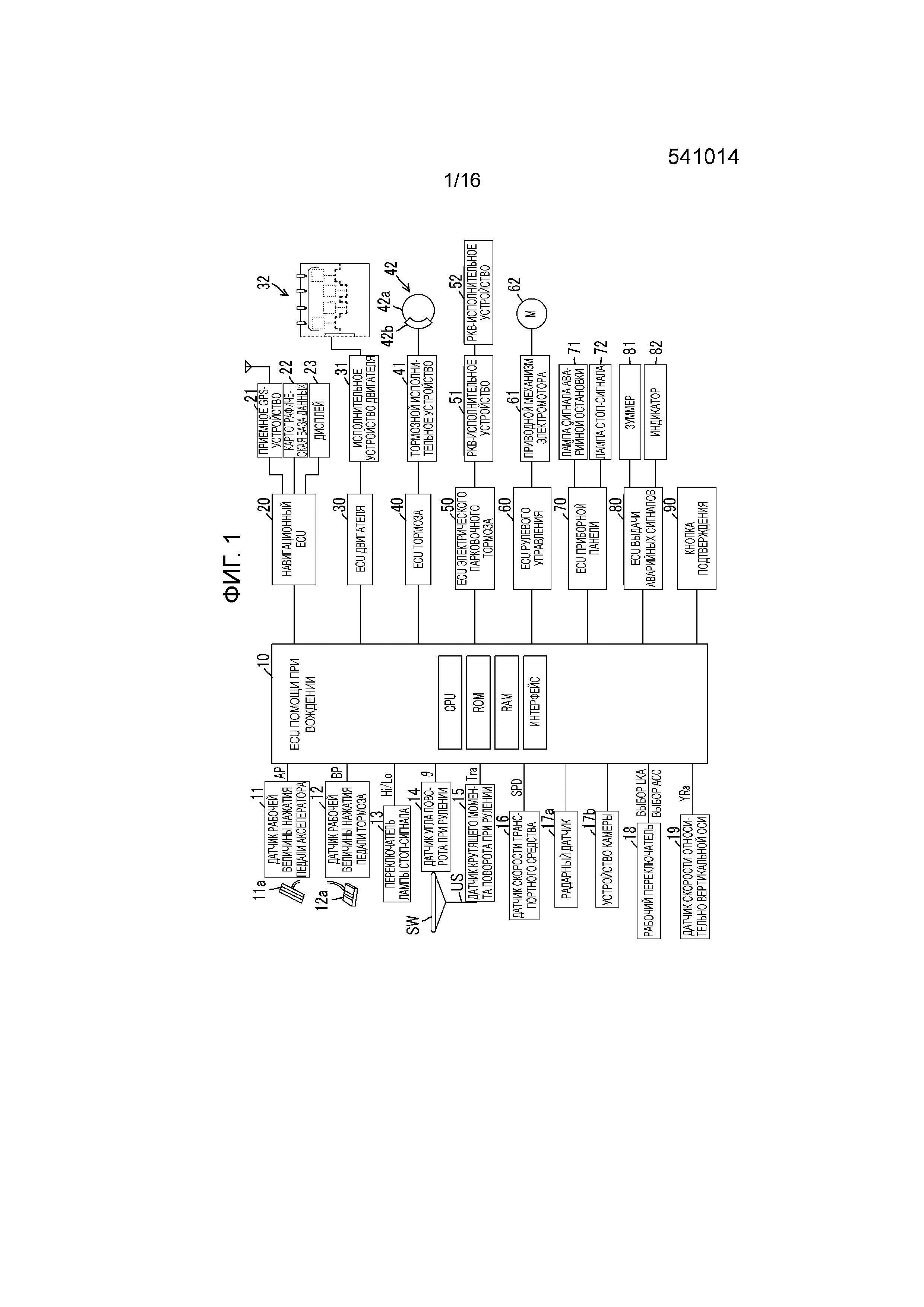
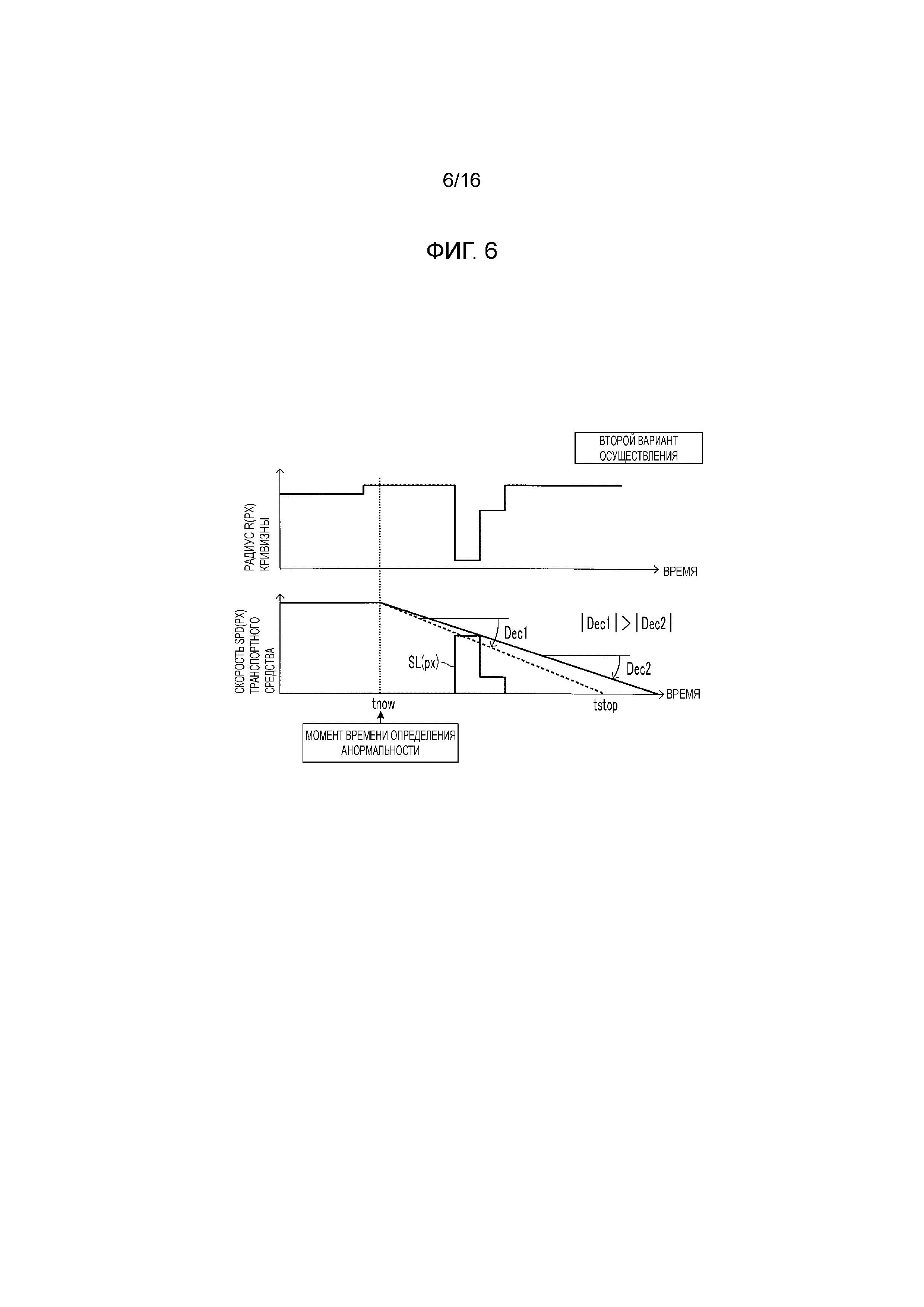
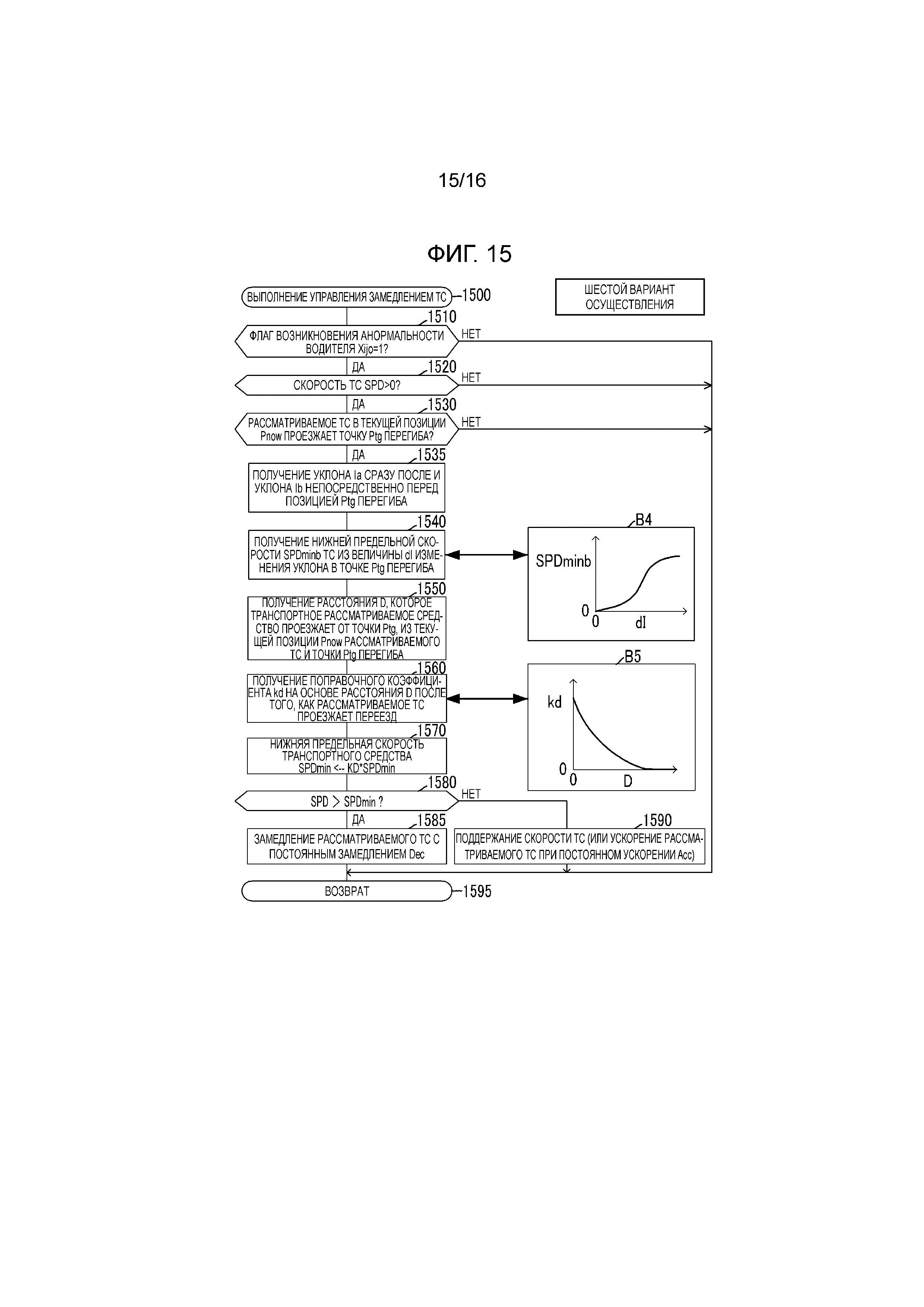
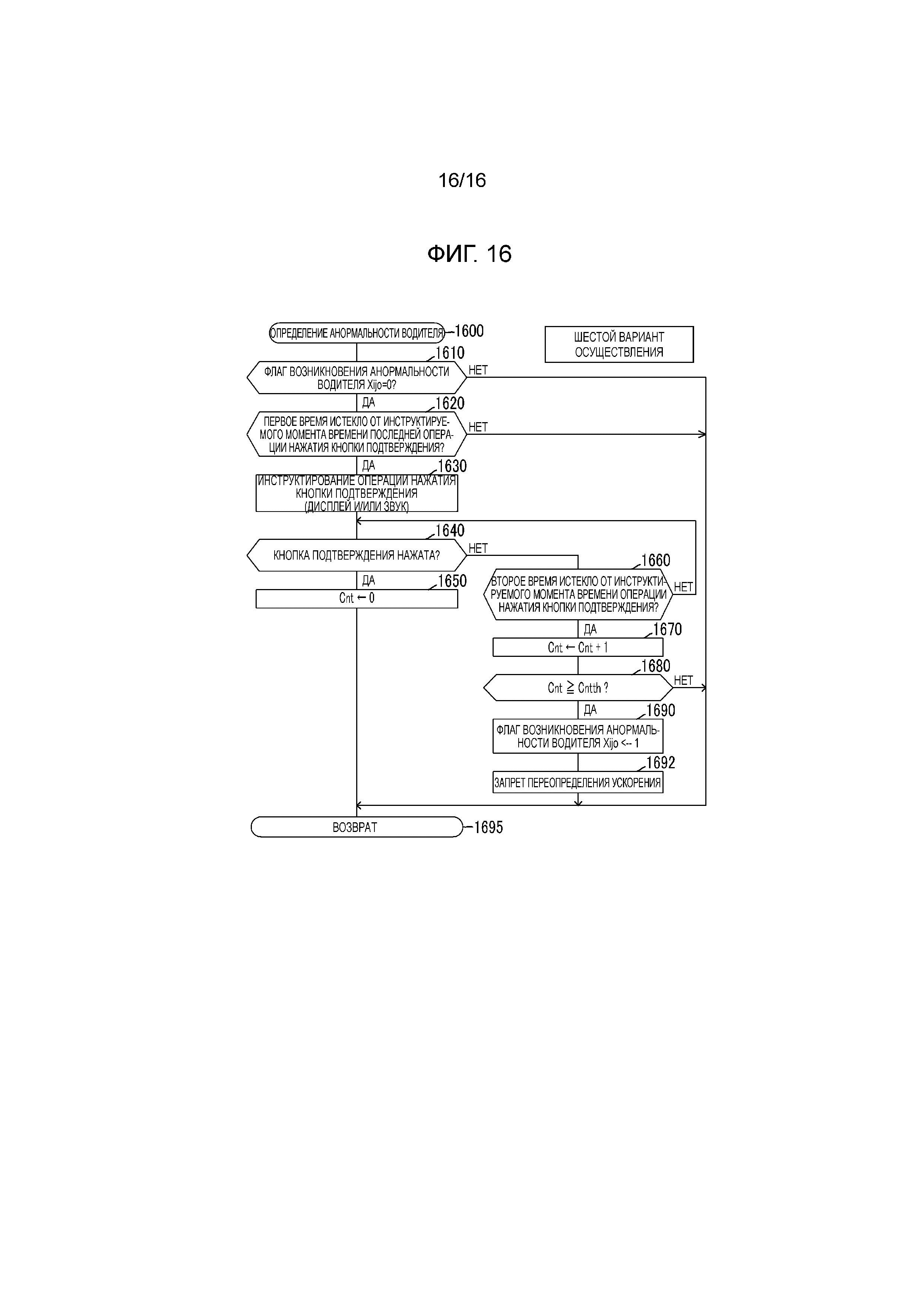
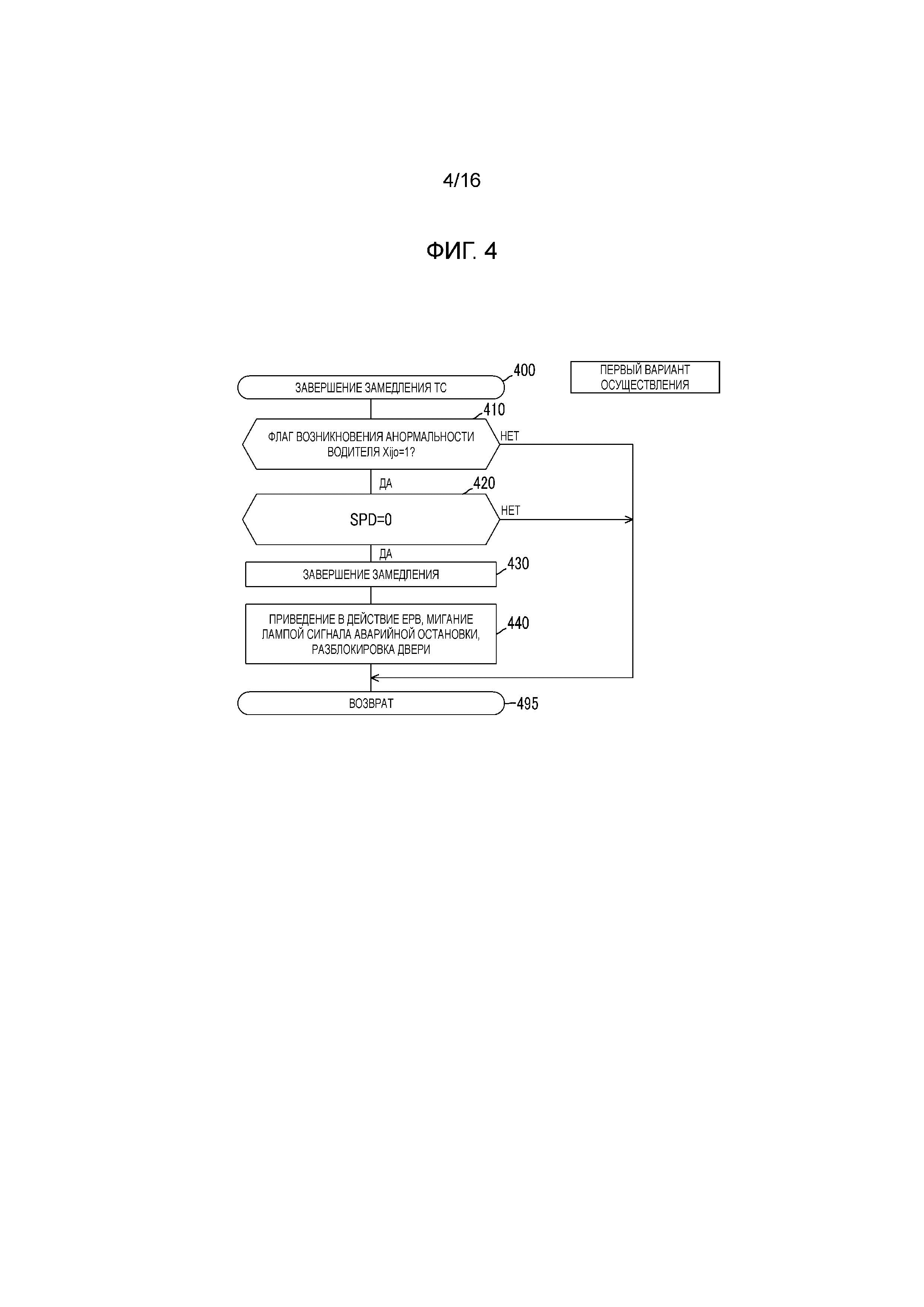
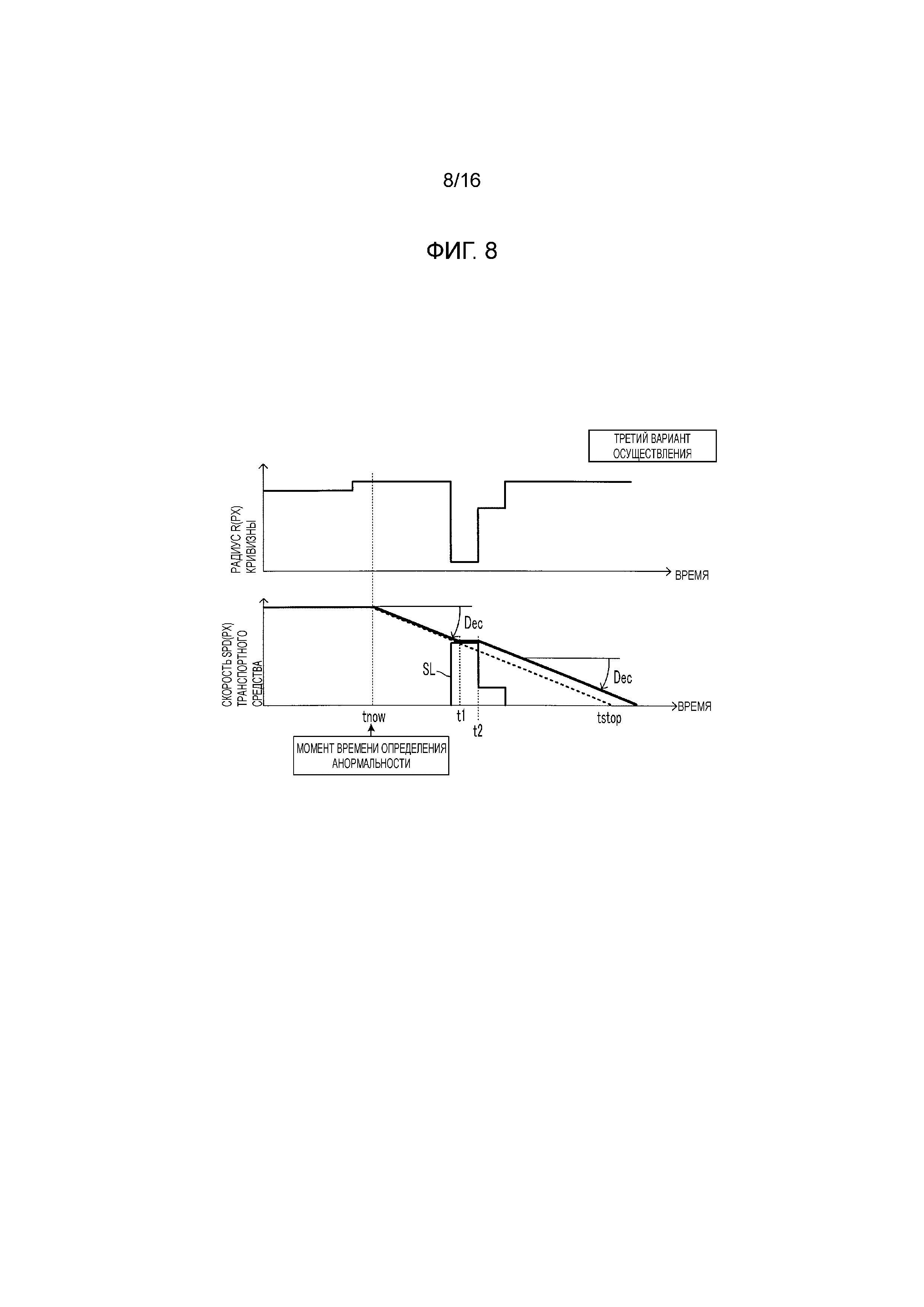
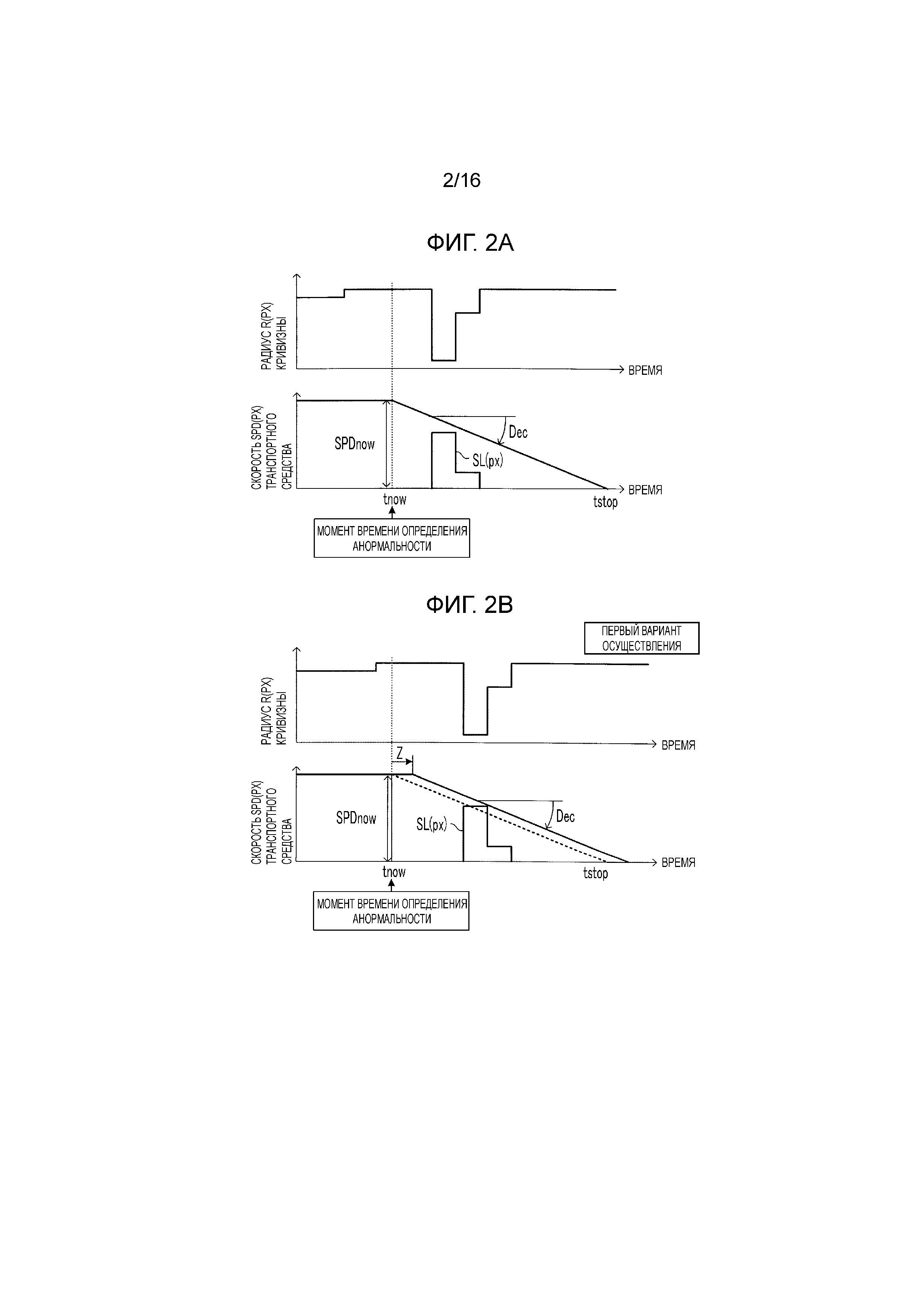
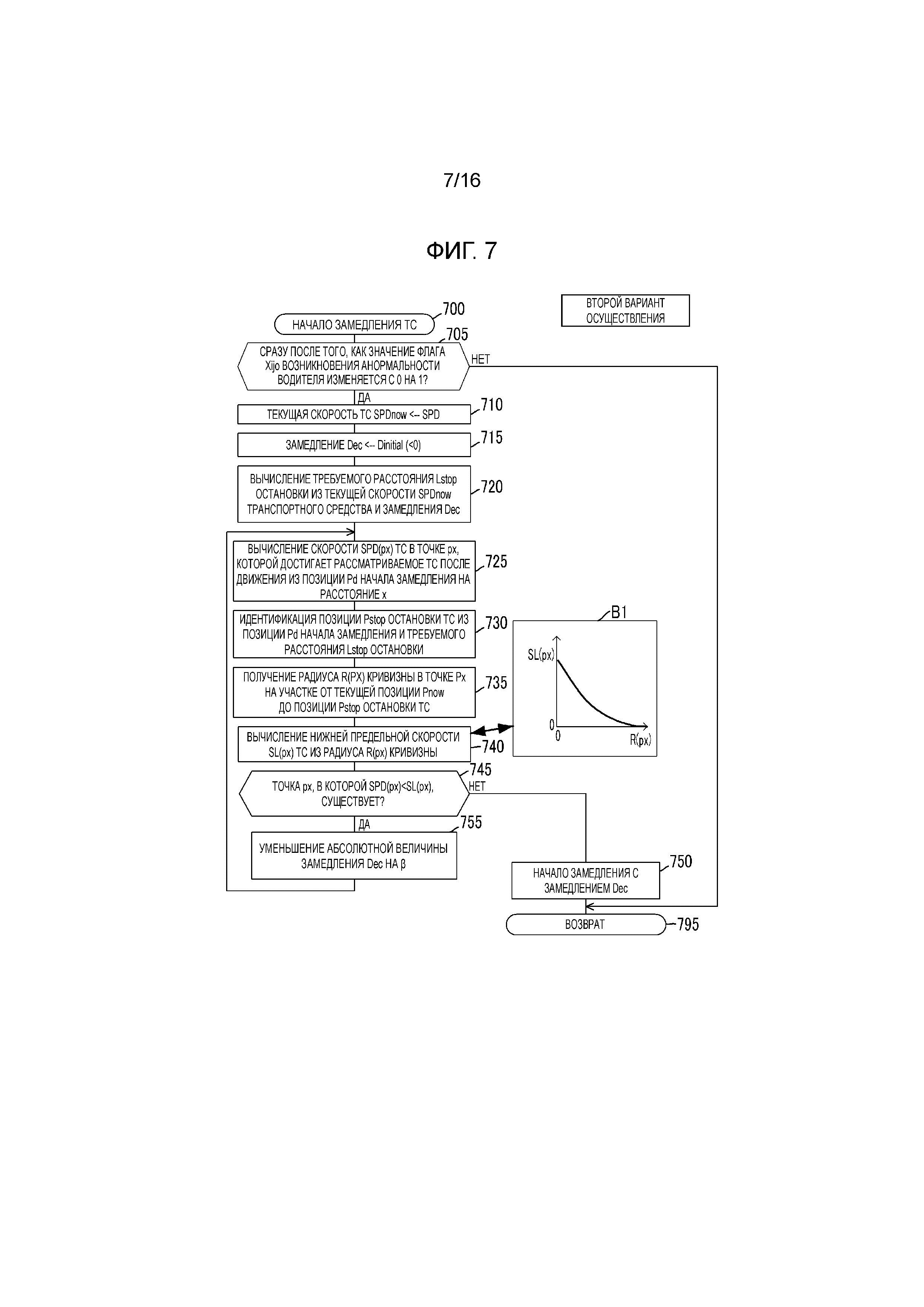
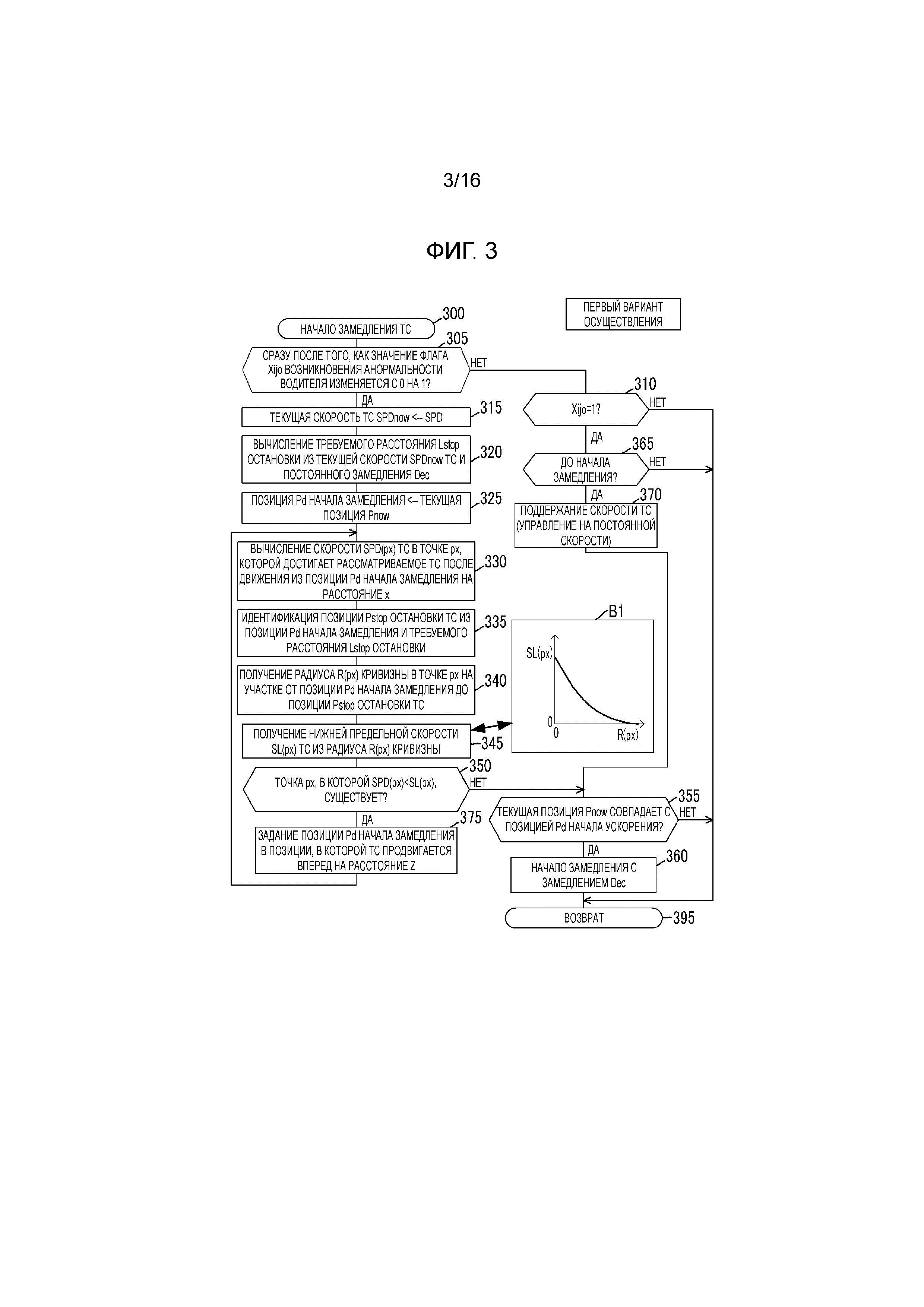
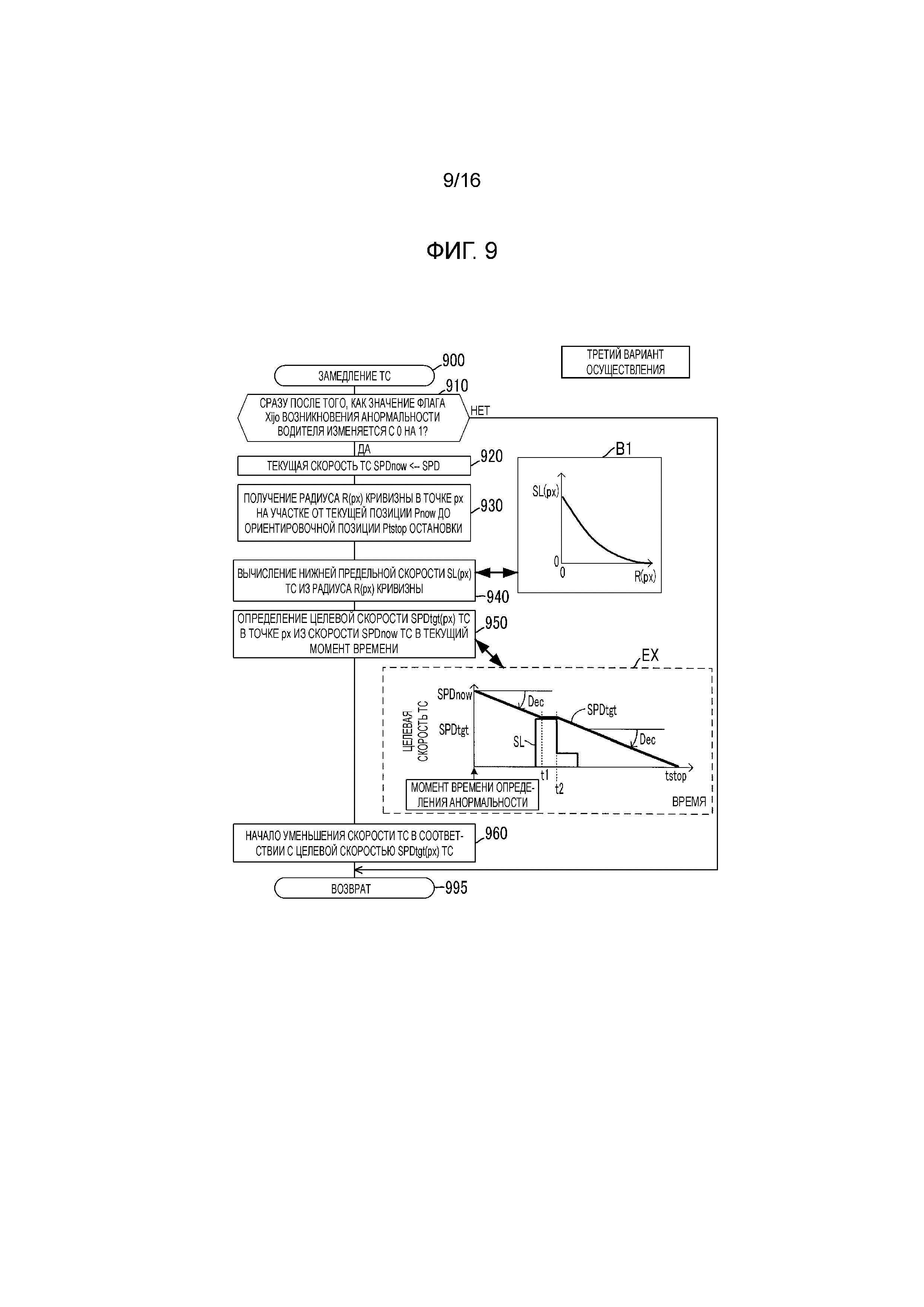
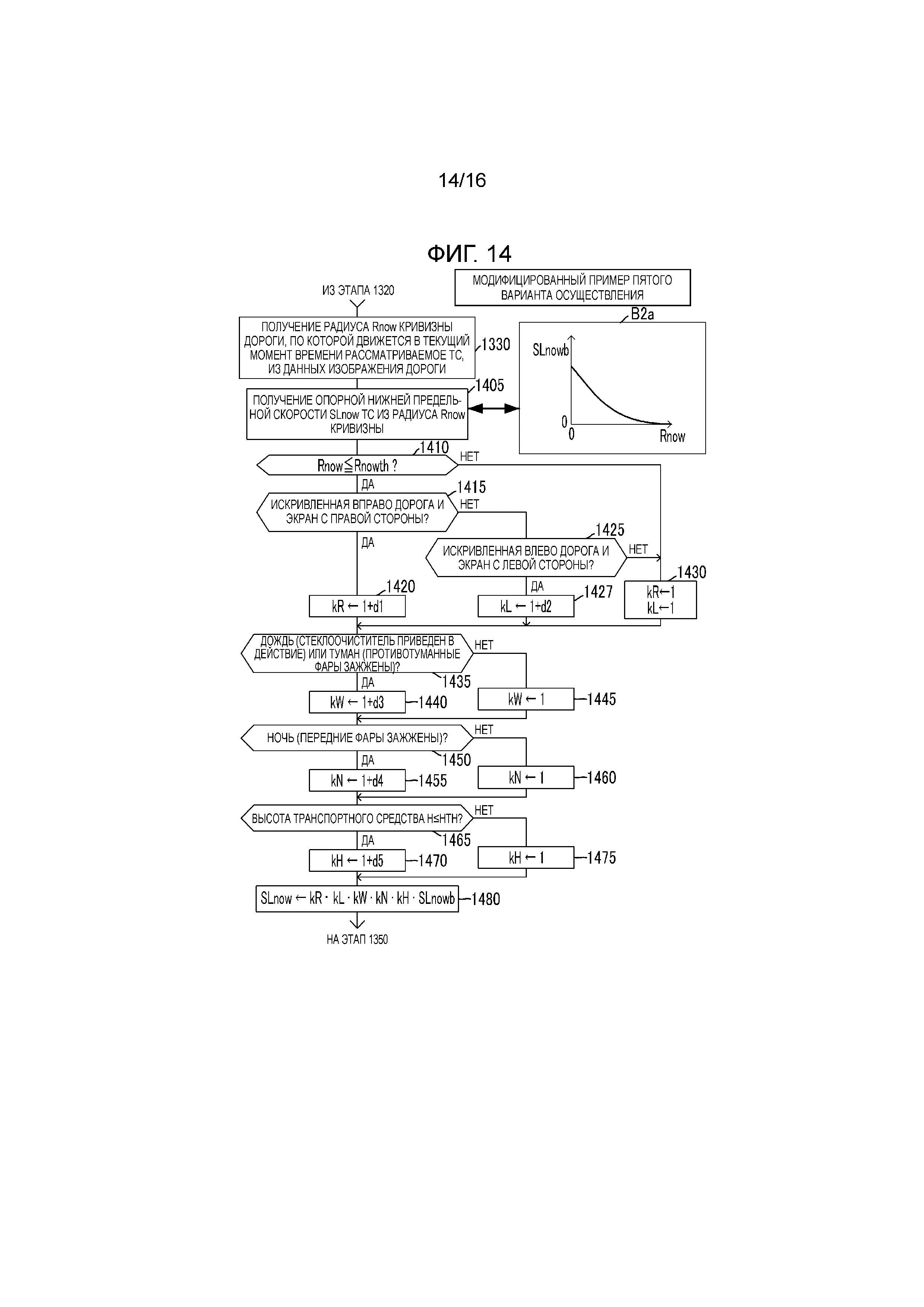
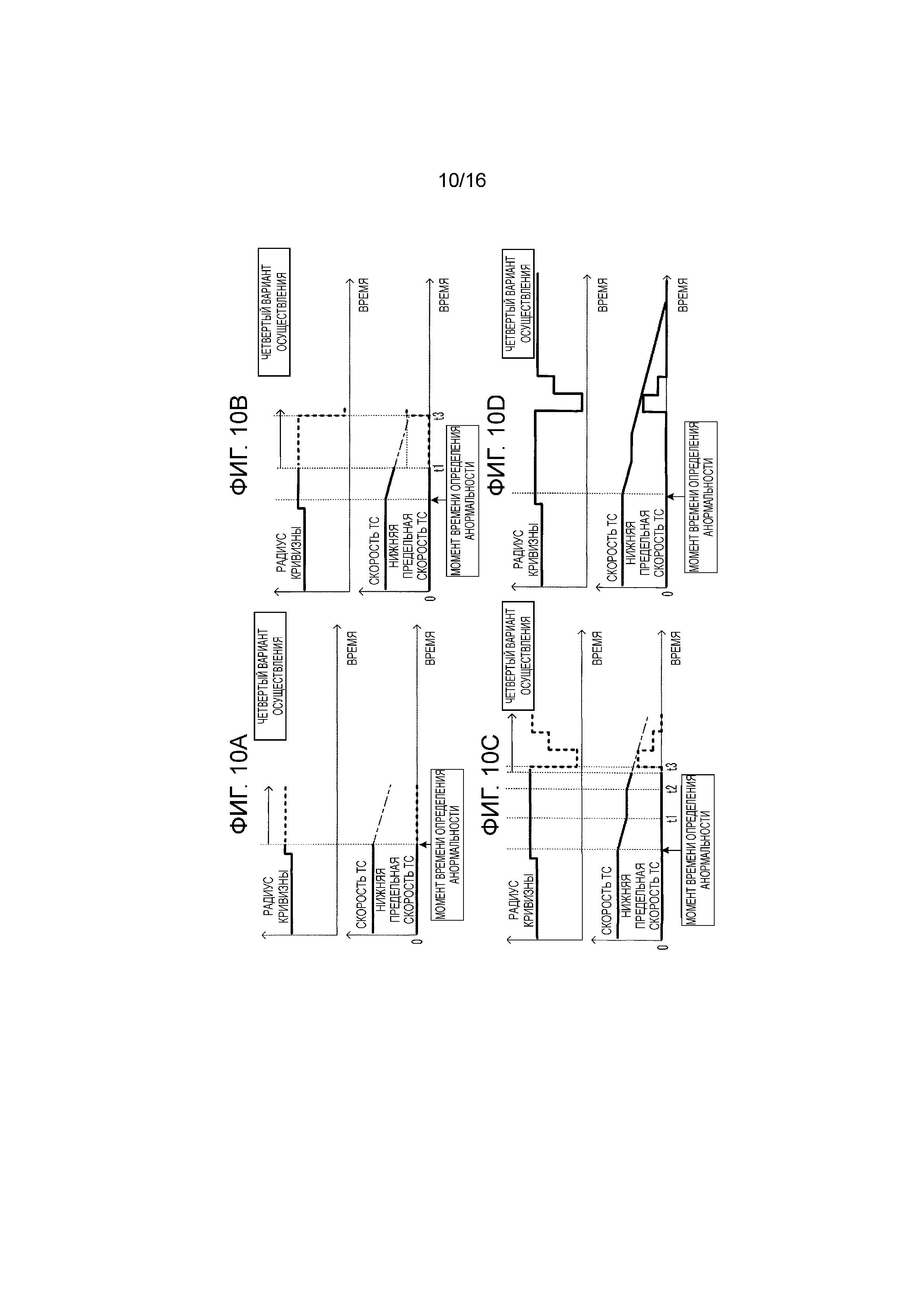
Система энергоснабжения для транспортного средства и транспортное средство, содержащее таковую
Аппаратура беспроводной подачи энергии, транспортное средство и способ управления системой беспроводной подачи энергии
Способ производства магнитов из редкоземельных металлов
Устанавливаемое на транспортное средство устройство, считываемый компьютером носитель, хранящий прикладную программу, установленную в портативном информационном терминале, способ ограничения использования для прикладной программы, портативный информационный терминал и устанавливаемая на транспортное средство система
Сиденье транспортного средства и панель спинки сиденья
Устройство передачи мощности транспортного средства
Присадка, масляный фильтр и смазочное устройство для машины
Система сбора данных транспортного средства и способ сбора данных транспортного средства
Устройство и способ управления впрыском топлива для двигателя внутреннего сгорания транспортного средства
Нейтрализатор выхлопных газов для двигателя внутреннего сгорания
Устройство расчета коэффициента замедления
Устройство помощи при вождении
Машина для производства бумажной трубки, способ производства бумажной трубки и бумажная трубка, произведенная этим способом
Устройство управления транспортным средством

