Результат интеллектуальной деятельности: УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение относится к устройству помощи при вождении.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] Имеются традиционные устройства помощи при вождении, которые устанавливаются в транспортных средствах и выводят информацию для помощи водителям, управляющим транспортными средствами. Патентный документ 1, например, раскрывает традиционное устройство помощи при вождении этого типа, в котором водитель уведомляется в отношении того, когда начинать замедление, в случаях, если водитель должен останавливаться на светофоре, на основе периода времени приближения до достижения светофора и периода времени изменения цвета сигнала светофора.
[0003] Патентный документ 1. Публикация заявки на патент (Япония) № 2010-244308
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0004] Устройство, описанное в вышеуказанном патентном документе 1, предоставляет помощь, чтобы указывать раннее замедление, посредством уведомления водителя, когда начинать замедление, в случаях, если водитель должен останавливаться на светофоре, но существуют возможности для дополнительного улучшения, например, в отношении предоставления более надлежащей помощи при вождении.
[0005] Изобретение осуществлено с учетом вышеуказанных обстоятельств, при этом его задача заключается в том, чтобы предоставлять устройство помощи при вождении, допускающее предоставление надлежащей помощи при вождении.
[0006] Чтобы достигать цели, описанной выше, устройство помощи при вождении, связанное с настоящим изобретением, включает в себя: устройство помощи, которое предоставляет помощь для указания рекомендованной операции вождения посредством вывода информации помощи при вождении для помощи при вождении транспортного средства на основе целевой величины состояния движения в предписанном местоположении транспортного средства, чтобы предоставлять помощь при вождении таким образом, что величина состояния движения транспортного средства становится целевой величиной состояния движения в предписанном местоположении; и устройство управления помощью, которое управляет устройством помощи таким образом, чтобы изменять режим вывода информации помощи при вождении между периодом времени от первого времени помощи на основе текущей величины состояния движения транспортного средства и целевой величины состояния движения в предписанном местоположении до второго времени помощи, которое основано на текущей величине состояния движения транспортного средства и целевой величине состояния движения в предписанном местоположении и которое следует после первого времени помощи, и периодом времени от второго времени помощи и далее.
[0007] Кроме того, в устройстве помощи при вождении, описанном выше, устройство управления помощью может изменять режим вывода информации помощи при вождении по мере прохождения времени в период времени от первого времени помощи до второго времени помощи.
[0008] Кроме того, в устройстве помощи при вождении, описанном выше, первое время помощи и второе время помощи могут быть вычислены на основе целевой величины состояния движения и темпа замедления транспортного средства в состоянии, в котором операция запроса на ускорение и операция запроса на торможение для транспортного средства отменяются.
[0009] Кроме того, в устройстве помощи при вождении, описанном выше, целевая величина состояния движения может быть рекомендованной скоростью транспортного средства, на которой рекомендуется операция запроса на торможение; и первое время помощи и второе время помощи могут быть вычислены на основе идентичного темпа замедления транспортного средства, подъезжающего к предписанному местоположению, и различных рекомендованных скоростей транспортного средства в различных предписанных местоположениях.
[0010] Кроме того, в устройстве помощи при вождении, описанном выше, целевая величина состояния движения может быть рекомендованной скоростью транспортного средства, при которой рекомендуется операция запроса на торможение; и первое время помощи и второе время помощи могут быть вычислены на основе идентичной рекомендованной скорости транспортного средства и различных темпов замедления транспортного средства.
[0011] Кроме того, устройство помощи при вождении, описанное выше, дополнительно может включать в себя устройство управления темпом замедления, которое управляет темпом замедления транспортного средства до тех пор, пока не будет выполнен операция запроса на торможение, в соответствии со временем отмены операции запроса на ускорение в период времени от первого времени помощи до второго времени помощи.
[0012] Кроме того, в устройстве помощи при вождении, описанном выше, транспортное средство может быть гибридным транспортным средством, имеющим двигатель внутреннего сгорания и электродвигатель в качестве источников приведения в движение.
[0013] Кроме того, в устройстве помощи при вождении, описанном выше, устройство управления помощью может управлять устройством помощи на основе целевой величины состояния движения в предписанном местоположении.
[0014] Кроме того, в устройстве помощи при вождении, описанном выше, устройство помощи может предоставлять помощь, чтобы указывать рекомендованную операцию вождения посредством вывода информации помощи при вождении.
[0015] Кроме того, в устройстве помощи при вождении, описанном выше, первое время помощи может быть самым ранним временем, от которого величина состояния движения транспортного средства должна становиться целевой величиной состояния движения в предписанном местоположении посредством выполнения рекомендованной операции вождения; и второе время помощи может быть самым поздним временем, от которого величина состояния движения транспортного средства должна становиться целевой величиной состояния движения в предписанном местоположении посредством выполнения рекомендованной операции вождения.
[0016] Устройство помощи при вождении согласно изобретению имеет преимущество в силу своей способности предоставления надлежащей помощи при вождении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0017] Фиг. 1 является схематичным структурным чертежом системы управления транспортного средства, связанной с первым вариантом осуществления.
Фиг. 2 является блок-схемой, показывающей один пример приблизительной структуры электронного модуля управления (ECU), связанного с первым вариантом осуществления.
Фиг. 3 является блок-схемой последовательности операций способа, показывающей один пример управления посредством ECU, связанного с первым вариантом осуществления.
Фиг. 4 является принципиальной схемой, показывающей взаимосвязь между скоростью транспортного средства и оставшимся расстоянием до позиции остановки и один пример режима помощи в системе управления транспортного средства, связанной с первым вариантом осуществления.
Фиг. 5 является принципиальной схемой, показывающей один пример режима отображения помощи посредством устройства с человеко-машинным интерфейсом (HMI), связанного с первым вариантом осуществления.
Фиг. 6 является блок-схемой последовательности операций способа, показывающей один пример управления посредством ECU, связанного со вторым вариантом осуществления.
Фиг. 7 является принципиальной схемой, показывающей взаимосвязь между скоростью транспортного средства и оставшимся расстоянием до позиции остановки и один пример режима помощи в системе управления транспортного средства, связанной со вторым вариантом осуществления.
Фиг. 8 является блок-схемой последовательности операций способа, показывающей один пример управления посредством ECU, связанного с третьим вариантом осуществления.
Фиг. 9 является принципиальной схемой, показывающей взаимосвязь между скоростью транспортного средства и оставшимся расстоянием до позиции остановки и один пример режима помощи в системе управления транспортного средства, связанной с третьим вариантом осуществления.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0018] Варианты осуществления изобретения подробно описываются ниже на основе чертежей. Изобретение не ограничено этими вариантами осуществления. Кроме того, составляющие элементы в вариантах осуществления, описанных ниже, включают в себя элементы, которые могут быть заменены или легко разработаны специалистами в данной области техники, или элементы, которые являются фактически идентичными.
[0019] ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 является схематичным чертежом, показывающим систему управления транспортного средства, связанную первым вариантом осуществления; фиг. 2 является блок-схемой, показывающей один пример схематичного чертежа ECU, связанного с первым вариантом осуществления; фиг. 3 является блок-схемой последовательности операций способа, показывающей один пример управления, выполняемого посредством ECU, связанного с первым вариантом осуществления; фиг. 4 является принципиальной схемой, показывающей один пример режима помощи и взаимосвязь между скоростью транспортного средства и оставшимся расстоянием до позиции остановки в системе управления транспортного средства, связанной с первым вариантом осуществления; и фиг. 5 является принципиальной схемой, показывающей один пример режима отображения помощи, согласно HMI-устройству, связанному с первым вариантом осуществления.
[0020] Как показано на фиг. 1, устройство 1 помощи при вождении согласно варианту осуществления применяется к системе 3 управления транспортного средства, которая устанавливается в транспортном средстве 2. Устройство 1 помощи при вождении содержит HMI-устройство 4, которое служит в качестве устройства помощи, и ECU 50. Устройство 1 помощи при вождении помогает в вождении транспортного средства 2 водителем, посредством ECU 50, управляющего HMI-устройством 4 и выводящего различную информацию помощи при вождении в зависимости от ситуации.
[0021] Система 3 управления транспортного средства, к которой применяется устройство 1 помощи при вождении варианта осуществления, является упреждающей системой помощи для обеспечения экономичного вождения, которая использует так называемую упреждающую информацию. Более конкретно, система 3 управления транспортного средства использует упреждающую информацию для того, чтобы помогать в экономичном вождении водителем, посредством инструктирования устройству 1 помощи при вождении предоставлять водителю помощь, чтобы способствовать процессу вождения, имеющему существенное преимущество в отношении снижения расхода топлива. Соответственно, система 3 управления транспортного средства является системой, которая имеет такую конструкцию, чтобы ограничивать использование топлива и снижать расход топлива. Типично, устройство 1 помощи при вождении выдает инструкции и помогает при операциях, выполняемых водителем, посредством вывода информации помощи при вождении с целью помощи в экономичном вождении водителем.
[0022] Кроме того, система 3 управления транспортного средства согласно варианту осуществления является так называемой гибридной системой, которая комбинирует двигатель 5 и электродвигатель-генератор 6 в качестве источника приведения в движение для приводного вращения ведущих колес транспортного средства 2. Более конкретно, транспортное средство 2 является гибридным транспортным средством, в котором электродвигатель-генератор 6 предоставляется в качестве источника приведения в движение в дополнение к двигателю 5. В транспортном средстве 2 двигатель 5 приводится в действие в максимально возможно эффективном состоянии, и электродвигатель-генератор 6 используется для того, чтобы оптимизировать чрезмерную или недостаточную мощность приведения в движение или тормозную силу двигателя, а также энергию рекуперации во время замедления, за счет этого достигая сокращения расхода топлива.
[0023] В описании, приведенном ниже, система 3 управления транспортного средства является гибридной системой, которая содержит двигатель 5 и электродвигатель-генератор 6 в качестве силовых источников приведения в движение, но изобретение не ограничено этим. Система 3 управления транспортного средства также может быть системой, которая содержит двигатель 5 в качестве источника приведения в движение, но не содержит электродвигатель-генератор 6, или системой, которая содержит электродвигатель-генератор 6 в качестве источника приведения в движение, но не содержит двигатель 5. Более конкретно, транспортное средство 2 также может быть так называемым традиционным транспортным средством или электромобилем (EV).
[0024] Другими словами, система 3 управления транспортного средства сконструирована посредством HMI-устройства 4, двигателя 5, который является двигателем внутреннего сгорания, электродвигателя-генератора 6, который является электрическим устройством, трансмиссии 7, тормозного устройства 8, аккумулятора 9 и т.п. Кроме того, система 3 управления транспортного средства сконструирована посредством датчика 10 скорости транспортного средства, датчика 11 акселератора, датчика 12 тормоза, устройства 13 глобальной системы позиционирования (GPS) (также называемого ниже "GPS"), устройства 14 беспроводной связи и базы 15 данных и т.п.
[0025] HMI-устройство 4 является устройством помощи, которое может выводить информацию помощи при вождении, которая является информацией для помощи при вождении транспортного средства 2, и предоставлять информацию помощи при вождении водителю. HMI-устройство 4 является установленным в транспортном средстве устройством, которое включает в себя, например, устройство отображения (устройство отображения визуальной информации) и динамик (устройство звукового вывода) и т.п., которые располагаются в салоне транспортного средства 2. HMI-устройство 4 может использовать существующие устройства, например, устройство отображения навигационной системы и динамики и т.д. HMI-устройство 4 представляет информацию и в силу этого выдает инструкции по операции вождения водителя посредством аудиоинформации и визуальной информации (схематической информации, текстовой информации) и т.п., с тем, чтобы обеспечивать возможность достижения пониженного расхода топлива. Через такое представление информации, HMI-устройство 4 помогает в достижении целевого значения посредством операции вождения, выполняемой водителем. HMI-устройство 4 электрически подключено к ECU 50 и управляется посредством ECU 50. HMI-устройство 4 также может включать в себя, например, устройство вывода сенсорной информации и т.п., которое выводит сенсорную информацию, такую как вибрации руля, вибрации сиденья, сопротивление педали и т.п.
[0026] В системе 3 управления транспортного средства, двигатель 5, электродвигатель-генератор 6, трансмиссия 7, тормозное устройство 8, аккумулятор 9 и т.п. устанавливаются в качестве различных приводных устройств для осуществления движения транспортного средства 2.
[0027] Двигатель 5 прикладывает мощность приведения в движение к колесам транспортного средства 2 в соответствии с операцией запроса на ускорение, выполняемой водителем, например, операцией нажатия педали акселератора. Двигатель 5 потребляет топливо и формирует крутящий момент двигателя в качестве механического крутящего момента, чтобы формировать мощность приведения в движение для обеспечения движения, которая прикладывается к ведущим колесам транспортного средства 2. Вкратце, двигатель 5 является тепловым двигателем, который выводит тепловую энергию, сгенерированную посредством сгорания топлива, в форме механической энергии, такой как крутящий момент, и его примерами являются бензиновый двигатель, дизельный двигатель и двигатель на сжиженном нефтяном газе (LPG) и Т.П. Двигатель 5, например, содержит устройство впрыска топлива, устройство зажигания и устройство дроссельного клапана и т.п., которые не иллюстрируются, и эти устройства электрически подключены к ECU 50 и управляются посредством ECU 50. Выходной крутящий момент двигателя 5 управляется посредством ECU 50. Мощность приведения в движение, сформированная посредством двигателя 5, может быть использована для того, чтобы вырабатывать электричество в электродвигателе-генераторе 6.
[0028] Электродвигатель-генератор 6 прикладывает мощность приведения в движение к колесам транспортного средства 2 в соответствии с операцией запроса на ускорение, выполняемой при вождении, например, операцией нажатия педали акселератора. Электродвигатель-генератор 6 формирует крутящий момент электродвигателя посредством преобразования электрической мощности в механическую мощность приведения в движение в качестве мощности приведения в движение для обеспечения движения, которая прикладывается к ведущим колесам транспортного средства 2. Электродвигатель-генератор 6 является вращательной электрической машиной, которая содержит статор, который является неподвижным элементом, и ротор, который является вращающимся элементом. Электродвигатель-генератор 6 является электродвигателем, который преобразует электрическую мощность в механическую мощность приведения в движение и выводит эту мощность приведения в движение, а также является электрогенератором, который рекуперирует механическую мощность приведения в движение посредством ее преобразования в электрическую мощность. Другими словами, электродвигатель-генератор 6 комбинирует функцию в качестве электродвигателя, который приводится в действие посредством подачи электрической мощности, преобразует электрическую мощность в механическую энергию и выводит эту механическую энергию (функцию приведения в движение), и функцию в качестве электрогенератора, который преобразует механическую энергию в электрическую мощность (функцию рекуперации). Электродвигатель-генератор 6 электрически подключен к ECU 50 через инвертор и т.п., который преобразует постоянный ток (DC) и переменный ток (AC) и управляется посредством ECU 50. Выходной крутящий момент и величина вырабатываемого электричества из электродвигателя-генератора 6 управляются посредством ECU 50 через инвертор.
[0029] Трансмиссия 7 является устройством передачи мощности приведения в движение, которое изменяет скорость выходной частоты вращения двигателя 5 и электродвигателя-генератора 6 и передает вывод на ведущие колеса транспортного средства 2. Трансмиссия 7 может быть так называемой механической трансмиссией с ручным управлением (MT) или может быть так называемой автоматической трансмиссией (AT), к примеру, ступенчатой AT, бесступенчатой трансмиссией (CVT), многорежимной MT (MMT), последовательной MT (SMT), трансмиссией с двумя сцеплениями (DCT) и т.п. Здесь, трансмиссия 7 описывается, например, как непрерывная трансмиссия с использованием планетарной зубчатой передачи и т.п. В трансмиссии 7, привод трансмиссии и т.п. электрически подключены к ECU 50 и управляются посредством ECU 50.
[0030] Тормозное устройство 8 прикладывает тормозную силу к колесам транспортного средства 2 в соответствии с операцией запроса на торможение, выполняемой водителем, например, в соответствии с операцией нажатия педали тормоза. Тормозное устройство 8 прикладывает тормозную силу к колесам, которые поддерживаются с возможностью вращения на кузове транспортного средства, для транспортного средства 2, посредством, например, формирования предписанной силы трения (сопротивления трения) между фрикционными элементами, такими как тормозная колодка и тормозной диск. Вследствие этой операции, тормозное устройство 8 формирует тормозную силу между землей и колесами транспортного средства 2 и реализует операцию торможения для транспортного средства 2.
В тормозном устройстве 8, привод тормоза и т.п. электрически подключены к ECU 50 и управляются посредством этого ECU 50.
[0031] Аккумулятор 9 является конденсаторным устройством, которое допускает накопление энергии и разряд накопленной энергии. Аккумулятор 9 электрически подключается к ECU 50 и выводит сигналы, связанные с различной информацией, в ECU 50.
[0032] При выступании в качестве электродвигателя, электродвигатель-генератор 6 принимает подачу энергии, накопленной в аккумуляторе 9, через инвертор, преобразует поданную мощность в мощность приведения в движение для обеспечения движения для транспортного средства 2 и выводит эту мощность приведения в движение. Кроме того, при действии в качестве генератора, электродвигатель-генератор 6 приводится в действие, чтобы вырабатывать электричество посредством входной мощности приведения в движение, и вырабатываемая электрическая энергия накапливается в аккумуляторе 9 через инвертор. В этом случае, электродвигатель-генератор 6 обеспечивает возможность тормозить вращение ротора (рекуперативное торможение) через сопротивление вращению, сформированное в роторе. В результате этого, в ходе рекуперативного торможения, электродвигатель-генератор 6 обеспечивает возможность формировать крутящий момент рекуперации электродвигателя, который является отрицательным крутящим моментом электродвигателя, в роторе посредством рекуперации электрической энергии, и, следовательно, тормозная сила может прикладываться к ведущим колесам транспортного средства 2. Более конкретно, в системе 3 управления транспортного средства механическая мощность приведения в движение вводится в электродвигатель-генератор 6 из ведущих колес транспортного средства 2, и в результате этого, электродвигатель-генератор 6 формирует электричество посредством рекуперации, посредством чего кинетическая энергия транспортного средства 2 может быть восстановлена в качестве электрической энергии. В соответствии с этим, посредством передачи механической мощности приведения в движение (отрицательного крутящего момента электродвигателя), сформированной посредством ротора электродвигателя-генератора 6, на ведущие колеса, система 3 управления транспортного средства обеспечивает возможность выполнять рекуперативное торможение посредством электродвигателя-генератора 6. В этом случае, если величина рекуперации посредством электродвигателя-генератора 6 (величина вырабатываемого электричества) задается относительно небольшой посредством системы 3 управления транспортного средства, то сформированная тормозная сила является относительно небольшой, и замедление, действующее на транспортное средство 2, является относительно небольшим. С другой стороны, если величина рекуперации посредством электродвигателя-генератора 6 (величина вырабатываемого электричества) задается относительно большой посредством системы 3 управления транспортного средства, то сформированная тормозная сила является относительно большой, и замедление, действующее на транспортное средство 2, является относительно большим.
[0033] Датчик 10 скорости транспортного средства, датчик 11 акселератора и датчик 12 тормоза являются устройствами определения состояния, которые определяют состояние движения транспортного средства 2 и вводы в транспортное средство 2 водителем (вводы от водителя), другими словами, величины состояния и физические величины, связанные с фактическим управлением транспортным средством 2 водителем. Датчик 10 скорости транспортного средства определяет скорость транспортного средства 2 (называемую "скоростью транспортного средства" ниже). Датчик 11 акселератора определяет степень открытия акселератора, которая является рабочей величиной (величиной нажатия) педали акселератора водителем. Датчик 12 тормоза определяет рабочую величину (величину нажатия) педали тормоза водителем, например, посредством определения давления в главном цилиндре и т.п. Датчик скорости 10, датчик 11 акселератора и датчик 12 тормоза электрически подключены к ECU 50 и выводят сигналы определения в ECU 50.
[0034] GPS-устройство 13 является устройством, которое определяет текущее местоположение транспортного средства 2. GPS-устройство 13 принимает GPS-сигнал, выводимый посредством GPS-спутника, и измеряет/вычисляет GPS-информацию, которая является информацией местоположения для транспортного средства 2 (координата X: X; координата Y: Y), на основе принимаемого GPS-сигнала. GPS-устройство 13 электрически подключено к ECU 50 и выводит сигнал, связанный с GPS-информацией, в ECU 50.
[0035] Устройство 14 беспроводной связи является устройством получения упреждающей информации, которое получает упреждающую информацию, связанную с движением транспортного средства 2, посредством использования беспроводной связи. Устройство 14 беспроводной связи получает упреждающую информацию посредством беспроводной связи из устройств, которые обмениваются информацией через инфраструктуру связи, к примеру, из устройств связи между транспортным средством и дорожной инфраструктурой (придорожных устройств), таких как оптические маяки, размещаемые вдоль обочины, устройств связи между транспортными средствами, установленных в других транспортных средствах, или центра автомобильной информации и связи (VICS) и т.п., работающий через Интернет, и т.п. Устройство 14 беспроводной связи получает эту упреждающую информацию, например, в форме информации о едущих впереди транспортных средствах, информации о едущих сзади транспортных средствах, информации о сигналах светофора, информации о проведении дорожных работ и ограничении движения, информации о пробках, информации о транспортных средствах аварийных служб, информации из статистической базы данных дорожных происшествий и т.д. Например, информация о сигналах светофора включает в себя информацию местоположения светофоров в прямом направлении движения транспортного средства 2 и информацию циклов сигналов светофора, указывающую циклы горения зеленого, желтого и красного сигналов светофора и времена смены сигналов и т.д. Устройство 14 беспроводной связи электрически подключается к ECU 50 и выводит сигналы, связанные с упреждающей информацией, в ECU 50.
[0036] База 15 данных сохраняет различную информацию. База 15 данных сохраняет картографическую информацию, включающую в себя информацию дороги, различные данные и изученную информацию, полученную в ходе фактического движения транспортного средства 2, и упреждающую информацию, полученную посредством устройства 14 беспроводной связи, и т.п. Например, информация дороги включает в себя информацию градиента дороги, информацию состояния поверхности дороги, информацию формы дороги, информацию об ограничении скорости, информацию кривизны дороги (поворотов), информацию о временных остановках, информацию позиции стоп-линии и т.п. К информации, сохраненной в базе 15 данных, надлежащим образом обращается ECU 50, и запрошенная информация считывается. База 15 данных проиллюстрирована здесь как установленная в транспортном средстве 2, но изобретение не ограничено этим, и также можно приспосабливать структуру, в которой база 15 данных предоставляется в информационном центре и т.п., который является внешним для транспортного средства 2, и ECU 50 обращается к ней для того, чтобы считывать запрошенную информацию, посредством беспроводной связи и т.п.
[0037] ECU 50 является модулем управления, который реализует общее управление всей системой 3 управления транспортного средства; например, ECU 50 может иметь структуру электронной схемы на основе общего микрокомпьютера, включающего в себя центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) и интерфейс. Результаты определения датчика 10 скорости транспортного средства, датчика 11 акселератора и датчика 12 тормоза, а также GPS-информация, полученная посредством GPS-устройства 13, упреждающая информация, полученная посредством устройства 14 беспроводной связи, различная информация, сохраненная в базе 15 данных, сигналы приведения в действие для соответствующих частей и электрические сигналы, соответствующие командам управления и т.п., вводятся в ECU 50. В ответ на входные электрические сигналы и т.п., ECU 50 управляет HMI-устройством 4, двигателем 5, электродвигателем-генератором 6, трансмиссией 7, тормозным устройством 8, аккумулятором 9 и т.п. ECU 50 реализует, например, управление приведением в действие двигателя 5 на основе степени открытия акселератора и скорости транспортного средства и т.д., управление приведением в действие электродвигателя-генератора 6, управление трансмиссией для трансмиссии 7, управление торможением тормозного устройства 8 и т.п. Кроме того, ECU 50 может реализовывать различное движение транспортного средства (режимы движения) в транспортном средстве 2, например, посредством комбинирования или избирательного использования двигателя 5 и электродвигателя-генератора 6 в соответствии с состоянием вождения.
[0038] Кроме того, ECU 50 обеспечивает возможность определять активацию и деактивацию акселератора, которая представляет собой операцию запроса на ускорение относительно транспортного средства 2, выполняемую водителем, например, на основе результата определения датчика 11 акселератора. Аналогично, ECU 50 обеспечивает возможность определять активацию и деактивацию тормоза, которая представляет собой операцию запроса на торможение относительно транспортного средства 2, выполняемую водителем, например, на основе результата определения датчика 12 тормоза. Состояние, в котором операция нажатия педали акселератора, выполняемая водителем, деактивируется, является состоянием, в котором водитель отменяет операцию запроса на ускорение относительно транспортного средства 2, а состояние, в котором операция нажатия педали акселератора, выполняемая водителем, активируется, является состоянием, в котором водитель выполняет операцию запроса на торможение относительно транспортного средства 2.
Аналогично, состояние, в котором операция торможения, выполняемая водителем, деактивируется, является состоянием, в котором водитель отменяет операцию запроса на торможение для транспортного средства 2, отменяется, и между тем, состояние, в котором операция торможения водителем активируется, является состоянием, в котором водитель выполняет операцию запроса на торможение для транспортного средства 2.
[0039] Устройство 1 помощи при вождении включает в себя HMI-устройство 4 и ECU 50, описанные выше. Устройство 1 помощи при вождении предоставляет помощь, чтобы указывать водителю выполнять вождение, имеющее сильный эффект в отношении снижения расхода топлива, посредством ECU 50, управляющего HMI-устройством 4 таким образом, чтобы выводить различную информацию помощи при вождении, в зависимости от ситуации. Устройство 1 помощи при вождении предоставляет инструкции и помощь, чтобы указывать рекомендованную операцию вождения водителю, типично, операцию вождения, которая заключает в себе изменения, посредством HMI-устройства 4, выводящего различную информацию помощи при операциях в соответствии с управлением, реализованным посредством ECU 50, на основе целевой величины состояния движения для транспортного средства 2 в ходе движения. Здесь, целевая величина состояния движения типично является величиной состояния движения транспортного средства 2 в предписанном местоположении или в предписанное время в транспортном средстве 2 в ходе движения. ECU 50 устройства 1 помощи при вождении управляет HMI-устройством 4 на основе целевых величин состояния движения в предписанном местоположении или в предписанное время, и HMI-устройство 4 выводит информацию помощи при вождении и предоставляет помощь, указывающую водителю выполнять рекомендованную операцию вождения, посредством чего помощь при вождении выполняется таким образом, что величина состояния движения транспортного средства 2 становится целевой величиной состояния движения в предписанном местоположении или в предписанное время.
[0040] Устройство 1 помощи при вождении согласно варианту осуществления выводит информацию помощи при вождении таким образом, чтобы применять запас по времени указания рекомендованной операции вождения водителю, вместо точного определения времени указания рекомендованной операции вождения водителю. Следовательно, устройство 1 помощи при вождении достигает надлежащей помощи при вождении, которая ограничивает странное ощущение, возникающее у водителя посредством помощи при вождении. Кроме того, здесь, устройство 1 помощи при вождении изменяет режим указания рекомендованной операции вождения водителю в соответствии с изменением во времени. Соответственно, устройство 1 помощи при вождении позволяет водителю легко понимать, что запас применен ко времени указания рекомендованной операции вождения, и водитель легко воспринимает помощь при вождении, предоставленную посредством устройства 1 помощи при вождении, и в результате этого, достигается более надлежащая помощь при вождении.
[0041] ECU 50 согласно варианту осуществления управляет HMI-устройством 4 и варьирует режим вывода информации помощи при вождении в первый период от самого раннего времени, которое является первым временем помощи, до самого позднего времени, которое является вторым временем помощи, и во второй период времени от самого позднего времени и далее. HMI-устройство 4 выводит информацию помощи при вождении в первом режиме в течение первого периода времени от самого раннего времени до самого позднего времени. С другой стороны, HMI-устройство 4 выводит информацию помощи при вождении во втором режиме, который отличается от первого режима, в течение второго периода от самого позднего времени и далее.
[0042] Здесь, самое раннее время и самое позднее время являются временами, которые определяются на основе целевой величины состояния движения, и самое позднее время является временем после самого раннего времени во временном ряду. Самое раннее время является самым ранним временем, в которое величина состояния движения транспортного средства 2 должна становиться целевой величиной состояния движения в предписанном местоположении, посредством выполнения водителем рекомендованной операции вождения, и оно также является временем начала помощи посредством устройства 1 помощи при вождении. С другой стороны, самое позднее время является самым поздним временем, в которое величина состояния движения транспортного средства 2 должна становиться целевой величиной состояния движения в предписанном местоположении, посредством выполнения водителем рекомендованной операции вождения.
[0043] Другими словами, посредством выполнения водителем рекомендованной операции вождения в первый период времени от самого раннего времени до самого позднего времени, величина состояния движения транспортного средства 2 уже становится целевой величиной состояния движения в предписанном местоположении. Устройство 1 помощи при вождении может предоставлять помощь при вождении таким образом, что величина состояния движения транспортного средства 2 становится целевой величиной состояния движения в предписанном местоположении или в предписанное время, посредством вывода информации помощи при вождении посредством HMI-устройства 4 с тем, чтобы указывать водителю выполнять рекомендованную операцию вождения, таким образом, что водитель выполняет рекомендованную операцию вождения в первый период времени от самого раннего времени до самого позднего времени.
[0044] ECU 50 согласно варианту осуществления изменяет состояние информации помощи при вождении после прохождения определенного времени в первый период времени от самого раннего времени до самого позднего времени. Другими словами, ECU 50 изменяет режим вывода информации помощи при вождении в соответствии с прохождением времени от самого раннего времени, которое является временем начала помощи. С другой стороны, ECU 50 согласно варианту осуществления фиксирует режим вывода информации помощи при вождении во второй период времени от самого позднего времени и далее. Более конкретно, первый режим вывода информации помощи при вождении в первый период времени является режимом, в котором информация помощи при вождении изменяется по мере прохождения времени. С другой стороны, второй режим вывода информации помощи при вождении во второй период времени является режимом, в котором информация помощи при вождении не изменяется по мере прохождения времени.
[0045] Здесь описывается один пример схематичной структуры ECU 50 в отношении блок-схемы на фиг. 2.
[0046] Здесь, целевая величина состояния движения описывается посредством рассмотрения, в качестве примера, целевой скорости начала операции торможения, которая является рекомендованной скоростью транспортного средства, на которой рекомендуется операция торможения (операция запроса на торможение) водителем. Кроме того, операция отпускания педали акселератора (операция отмены операции запроса на ускорение) описывается в качестве одного примера рекомендованной операции вождения, посредством которой устройство 1 помощи при вождении помогает водителю. Кроме того, предполагается, что устройство 1 помощи при вождении выводит визуальную информацию в качестве одного примера информации помощи при вождении. Устройство 1 помощи при вождении описывается здесь в качестве отображающего изображения с визуальной информацией в качестве информации помощи при вождении на устройстве отображения визуальной информации, таком как центральный индикатор, дисплей на лобовом стекле (HUD), дисплей на переднем ветровом стекле, жидкокристаллическая панель отображения и т.п., которое составляет HMI-устройство 4.
[0047] Другими словами, вследствие выполнения водителем операции отпускания педали акселератора в первый период времени от самого раннего времени до самого позднего времени, скорость транспортного средства 2 становится приблизительно целевой скоростью начала операции торможения в предписанном местоположении. Другими словами, первый период времени от самого раннего времени до самого позднего времени является оптимальным периодом времени прекращения ускорения. Устройство 1 помощи при вождении отображает изображение информации помощи при вождении посредством HMI-устройства 4, чтобы указывать операцию отпускания педали акселератора, таким образом, что водитель выполняет операцию отпускания педали акселератора в первый период времени от самого раннего времени до самого позднего времени. Следовательно, устройство 1 помощи при вождении обеспечивает возможность предоставлять помощь при вождении таким образом, что скорость транспортного средства 2 становится целевой скоростью начала операции торможения в предписанном местоположении и в предписанное время.
[0048] Более конкретно, как показано посредством примера на фиг. 2, ECU 50 включает в себя модуль 51 вычисления первой информации, модуль 52 вычисления второй информации и модуль 53 управления транспортного средства. Модуль 51 вычисления первой информации и модуль 52 вычисления второй информации являются модулями вычисления, которые являются совместимыми, например, с интеллектуальной транспортной системой (ITS), и служат для инфраструктурной координации и навигационной координации. Модуль 53 управления транспортного средства является модулем управления для управления различными модулями транспортного средства 2. Модуль 53 управления транспортного средства подключается к ECU привода или датчику, который управляет различными приводами, такими как ECU управления двигателем, ECU управления электродвигателем-генератором, ECU управления трансмиссией, ECU управления тормозом, ECU управления аккумулятором и т.п., через контроллерную сеть 54 (CAN), которая сконструирована как бортовая сеть. ECU 50 не ограничивается этим и также может включать в себя навигационное устройство, в дополнение к модулю 51 вычисления первой информации.
[0049] Модуль 51 вычисления первой информации вычисляет оставшееся расстояние от транспортного средства 2 до временной остановки или поворота в прямом направлении движения на основе статической информации инфраструктуры, например, картографической информации и т.п., которая включает в себя информацию дороги. Кроме того, модуль 51 вычисления первой информации изучает поведение при нормальном вождении водителя и на основе этого проводит оценку поведения при вождении и изучает/прогнозирует поведение при замедлении и остановке водителя. Первый модуль вычисления 51 также вычисляет оставшееся расстояние от транспортного средства 2 до позиции, в которой транспортное средство замедляется и останавливается (может называться "позицией замедления и остановки" ниже) в прямом направлении движения. Здесь, позиция замедления и остановки, полученная посредством изучения поведения при нормальном вождении водителя, является, например, позицией, в которой возникает высокая частота замедления и остановки водителем (в дальнейшем иногда называемая в качестве "замедления и остановки"), помимо временных остановок.
[0050] Модуль 51 вычисления первой информации может выполнять изучение поведения при замедлении и остановке водителя на основе различной информации, полученной посредством фактического движения транспортного средства 2, другими словами, изучение позиций замедления и остановки, соответствующих водителю. Например, на основе различной информации, полученной в ходе фактического движения транспортного средства 2, модуль 51 вычисления первой информации изучает привычки и склонности при операции вождения из нормального вождения водителя, в ассоциации с человеком (например, атрибуты водителя), местоположением (например, место, в котором выполняется операция), обстановкой (например, временной диапазон и т.д.) и т.п. Например, модуль 51 вычисления первой информации изучает позиции замедления и остановки и т.п., в которых возникает высокая частота временной остановки или замедления и остановки водителем, посредством статистической обработки операций нажатия и отпускания педали акселератора и операций нажатия и отпускания педали тормоза, выполняемых водителем. Модуль 51 вычисления первой информации сохраняет изученную информацию в базе 15 данных в качестве информации изучения.
[0051] В функциональном отношении модуль 51 вычисления первой информации содержит модуль 51a оценки местоположения, модуль 51b получения информации о временных остановках и поворотах (который может называться "модулем получения информации об остановках и поворотах" ниже) и модуль 51c вычитания. Модуль 51a оценки местоположения получает GPS-информацию через GPS-устройство 13 и получает информацию текущего местоположения транспортного средства 2 (данного транспортного средства). Модуль 51a оценки местоположения выводит эту информацию текущего местоположения в модуль 51b получения информации об остановках и поворотах и модуль 51c вычитания. Модуль 51b получения информации об остановках и поворотах обращается к картографической информации, сохраненной в базе 15 данных, различной информации, полученной посредством фактического движения транспортного средства 2, и изученной информации на основе информации текущего местоположения, вводимой из модуля 51a оценки местоположения, и получает информацию целевого местоположения, указывающую позицию временной остановки, поворота или замедления и остановки в прямом направлении движения транспортного средства 2. Модуль 51b получения информации об остановках и поворотах выводит эту информацию целевого местоположения в модуль 51c вычитания. Модуль 51c вычитания вычисляет разность между местоположением транспортного средства 2, как указано посредством информации текущего местоположения, вводимой из модуля 51a оценки местоположения, и позицией временной остановки, поворота или замедления и остановки, указываемой посредством информации целевого местоположения, вводимой из модуля 51b получения информации об остановках и поворотах, и вычисляет оставшееся расстояние до позиции временной остановки, поворота или замедления и остановки. Модуль 51c вычитания выводит информацию оставшегося расстояния, указывающую это оставшееся расстояние, в модуль 53a регулирования модуля 53 управления транспортного средства.
[0052] Модуль 52 вычисления второй информации, например, вычисляет оставшееся расстояние от транспортного средства 2 до позиции остановки вследствие красного сигнала светофора в прямом направлении движения, на основе динамической информации инфраструктуры, такой как информация о сигналах светофора и т.п.
[0053] В функциональном отношении модуль 52 вычисления второй информации содержит модуль 52a оценки местоположения, модуль 52b получения информации о сигналах светофора и модуль 52c вычитания. Модуль 52a оценки местоположения получает информацию текущего местоположения для транспортного средства 2 посредством получения GPS-информации через GPS-устройство 13. Модуль 52a оценки местоположения выводит эту информацию текущего местоположения в модуль 52c вычитания. Модуль 52b получения информации о сигналах светофора получает информацию о сигналах светофора через устройство 14 беспроводной связи и получает информацию целевого местоположения, указывающую позицию остановки вследствие красного сигнала светофора в прямом направлении движения транспортного средства 2, на основе этой информации о сигналах светофора. Модуль 52b получения информации о сигналах светофора выводит информацию целевого местоположения в модуль 52c вычитания. Модуль 52c вычитания вычисляет разность между местоположением транспортного средства 2, указываемым посредством информации текущего местоположения, вводимой из модуля 52a оценки местоположения, и позицией остановки вследствие красного сигнала светофора, указываемой посредством целевой информации местоположения, вводимой из модуля 52b получения информации о сигналах светофора, и вычисляет оставшееся расстояние до позиции остановки вследствие красного сигнала светофора. Модуль 52c вычитания выводит информацию оставшегося расстояния, указывающую это оставшееся расстояние, в модуль 53a регулирования модуля 53 управления транспортного средства.
[0054] Модуль 53 управления транспортного средства выполняет полное управление HMI-устройством 4 и мощностью приведения в движение транспортного средства 2 на основе оставшегося расстояния до позиции временной остановки, поворота или замедления и остановки, вычисленного посредством модуля 51 вычисления первой информации, оставшегося расстояния до позиции остановки вследствие красного сигнала светофора, вычисленного посредством модуля 52 вычисления второй информации, скорости Vx транспортного средства 2 и активации/деактивации операции нажатия педали акселератора и операции торможения.
[0055] В функциональном отношении модуль 53 управления транспортного средства содержит модуль 53a регулирования, модуль 53b вычисления целевых величин и модуль 53c управления мощностью торможения и приведения в движение. Модуль 53a регулирования регулирует информацию оставшегося расстояния до позиции временной остановки, поворота или замедления и остановки, вводимую из модуля 51c вычитания, и информацию оставшегося расстояния до позиции остановки вследствие красного сигнала светофора, вводимую из модуля 52c вычитания. Например, модуль 53a регулирования регулирует информацию оставшегося расстояния на основе точности информации оставшегося расстояния или относительного размера оставшегося расстояния и т.д. и выводит результат регулирования в модуль 53b вычисления целевых величин.
[0056] Модуль 53b вычисления целевых величин вычисляет целевую величину состояния движения на основе результата регулирования информации оставшегося расстояния, вводимого из модуля 53a регулирования, скорости Vx транспортного средства 2, вводимой из датчика 10 скорости транспортного средства через CAN 54 и т.п., и т.д. Модуль 53b вычисления целевых величин управляет HMI-устройством 4 на основе этой целевой величины состояния движения. Кроме того, модуль 53b вычисления целевых величин вычисляет самое раннее время и самое позднее время для выдачи инструкций и помощи при операции отпускания педали акселератора через HMI-устройство 4 на основе целевой величины состояния движения и управляет HMI-устройством 4 таким образом, чтобы выводить информацию помощи при вождении, соответственно.
[0057] Здесь описывается один пример вычисления самого раннего времени и самого позднего времени посредством модуля 53b вычисления целевых величин и помощи при вождении, предоставленной посредством HMI-устройства 4, со ссылкой на фиг. 3, 4 и 5. В примере на фиг. 4, описывается случай, в котором целью является помощь при вождении в отношении временной остановки или позиции остановки вследствие красного сигнала светофора, но процедура является практически аналогичной в случае, если целью является помощь при вождении в отношении поворота, на котором прогнозируется операция торможения водителем. Здесь, если целью является помощь при вождении в отношении поворота, на котором прогнозируется операция торможения водителем, то процедура отличается от примера на фиг. 4 тем, что операция торможения водителем может завершаться в состоянии, в котором скорость транспортного средства 2 превышает нуль (это применяется аналогично к вариантам осуществления, приведенным ниже).
[0058] Модуль 53b вычисления целевых величин вычисляет самое раннее время и самое позднее время на основе целевой величины состояния движения и темпа замедления при отпускании педали акселератора. Здесь, темп замедления при отпускании педали акселератора соответствует темпу замедления транспортного средства 2, когда операция ускорения и операция торможения деактивированы (когда операция запроса на ускорение и операция запроса на торможение для транспортного средства 2 отменяются). Кроме того, например, целевая величина состояния движения является целевой скоростью начала операции торможения, на которой рекомендуется операция торможения водителем, как описано выше, и модуль 53b вычисления целевых величин вычисляет самое раннее время и самое позднее время на основе идентичного темпа замедления при отпускании педали акселератора и различных целевых скоростей начала операции торможения.
[0059] Как показано на фиг. 3 и 4, во-первых, модуль 53b вычисления целевых величин вычисляет целевую верхнюю предельную скорость V_b1 начала операции торможения и целевую нижнюю предельную скорость V_b2 начала операции торможения, в качестве различных целевых скоростей начала операции торможения, на основе текущей скорости V_now (скорости приближения) транспортного средства 2 (ST1). Модуль 53b вычисления целевых величин вычисляет целевую верхнюю предельную скорость V_b1 начала операции торможения посредством умножения скорости V_now транспортного средства на предписанный коэффициент верхней предельной скорости. Модуль 53b вычисления целевых величин вычисляет целевую нижнюю предельную скорость V_b2 начала операции торможения посредством умножения скорости V_now транспортного средства на предписанный коэффициент нижней предельной скорости, который меньше коэффициента верхней предельной скорости. Коэффициент верхней предельной скорости, например, задается таким образом, что целевая верхняя предельная скорость V_b1 начала операции торможения является скоростью, при которой у водителя транспортного средства 2 или у водителя следующего транспортного средства не возникает ощущение экстренного торможения, когда выполняется операция нажатия педали тормоза. Коэффициент нижней предельной скорости, например, задается таким образом, что целевая нижняя предельная скорость V_b2 начала операции торможения является скоростью, на которой позиция остановки может быть достигнута без вызывания стресса у водителя транспортного средства 2 или у водителя следующего транспортного средства вследствие чрезмерно низкой скорости транспортного средства 2, после выполнения операции отпускания педали акселератора и до выполнения операции нажатия педали тормоза.
[0060] Затем, модуль 53b вычисления целевых величин вычисляет целевую самую раннюю позицию X_b1 начала операции торможения и целевую самую позднюю позицию X_b2 начала операции торможения в качестве предписанных точек на основе целевой верхней предельной скорости V_b1 начала операции торможения и целевой нижней предельной скорости V_b2 начала операции торможения и заранее установленного целевого темпа A_brake замедления при торможении (ST2).
[0061] Целевой темп A_brake замедления при торможении, например, задается заранее в качестве фиксированного значения в соответствии с темпом замедления, который не дает водителю ощущение экстренного торможения или не вызывает странное ощущение, когда водитель выполняет операцию нажатия педали тормоза. Кроме того, здесь, поскольку система 3 управления транспортного средства является гибридной системой, то более предпочтительно, целевой темп A_brake замедления при торможении задается равным темпу замедления, имеющему некоторый запас относительно верхнего предельного темпа замедления при рекуперации, при котором рекуперация может эффективно выполняться посредством электродвигателя-генератора 6. Кроме того, предпочтительно, целевой темп A_brake замедления при торможении задается в соответствии с темпом замедления, при котором замедление, запрашиваемое в соответствии с операцией торможения водителем, может удовлетворяться посредством рекуперативного торможения электродвигателем-генератором 6. В этом случае в системе 3 управления транспортного средства, которая является гибридной системой, при условии, что темп замедления, запрашиваемый в соответствии с операцией торможения водителем, равен или меньше целевого темпа замедления при торможении, то можно останавливать транспортное средство 2 в позиции остановки посредством рекуперативного торможения посредством электродвигателя-генератора 6 без необходимости фрикционного торможения посредством тормозного устройства 8. В этом случае, система 3 управления транспортного средства обеспечивает возможность эффективно рекуперировать кинетическую энергию транспортного средства 2 в качестве электрической мощности посредством рекуперации при торможении в соответствии с операцией торможения водителем без потребления кинетической энергии транспортного средства 2 в форме тепловой энергии посредством фрикционного торможения, и, следовательно, может ожидаться хороший эффект в снижении расхода топлива.
[0062] Модуль 53b вычисления целевых величин вычисляет целевую самую раннюю позицию X_b1 начала операции торможения на основе целевой верхней предельной скорости V_b1 начала операции торможения и целевого темпа A_brake замедления при торможении, посредством рассмотрения, в качестве исходной позиции, позиции остановки, соответствующей оставшемуся расстоянию, регулируемому посредством модуля 53a регулирования. Другими словами, модуль 53b вычисления целевых величин выполняет обратное вычисление позиции начала операции торможения, посредством которой транспортное средство 2 может быть остановлено в позиции остановки, если транспортное средство 2, движущееся на целевой верхней предельной скорости V_b1 начала операции торможения, замедляется при целевом темпе A_brake замедления при торможении посредством операции торможения, и задает ее в качестве целевой самой ранней позиции X_b1 начала операции торможения.
[0063] Аналогично, модуль 53b вычисления целевых величин вычисляет целевую самую позднюю позицию X_b2 начала операции торможения на основе целевой нижней предельной скорости V_b2 начала операции торможения и целевого темпа A_brake замедления при торможении, посредством рассмотрения, в качестве исходной позиции, позиции остановки, соответствующей оставшемуся расстоянию, регулируемому посредством модуля 53a регулирования. Другими словами, модуль 53b вычисления целевых величин выполняет обратное вычисление позиции начала операции торможения, посредством которой транспортное средство 2 может быть остановлено в позиции остановки, если транспортное средство 2, движущееся на целевой нижней предельной скорости V_b2 начала операции торможения, замедляется при целевом темпе A_brake замедления при торможении посредством операции торможения, и задает ее в качестве целевой самой поздней позиции X_b2 начала операции торможения.
[0064] Комбинация целевой самой ранней позиции X_b1 начала операции торможения, которая является предписанным местоположением, и целевой верхней предельной скорости V_b1 начала операции торможения, которая является целевой величиной состояния движения, соответствует комбинации самой ранней позиции начала операции торможения и скорости начала операции торможения, посредством которой транспортное средство может приближаться к позиции остановки при оптимальном целевом темпе A_brake замедления при торможении, когда водитель выполняет операцию торможения. Комбинация целевой самой поздней позиции X_b2 начала операции торможения, которая является предписанным местоположением, и целевой нижней предельной скорости V_b2 начала операции торможения, которая является целевой величиной состояния движения, соответствует комбинации самой поздней позиции начала операции торможения и скорости начала операции торможения, посредством которой транспортное средство может приближаться к позиции остановки при оптимальном целевом темпе A_brake замедления при торможении, когда водитель выполняет операцию торможения.
[0065] Система 3 управления транспортного средства может инструктировать транспортному средству 2 останавливаться в позиции остановки при оптимальном целевом темпе A_brake замедления при торможении или ниже посредством выполнения водителем операции торможения в состоянии, в котором транспортное средство 2 находится в диапазоне от целевой самой ранней позиции X_b1 начала операции торможения до целевой самой поздней позиции X_b2 начала операции торможения, и скорость транспортного средства находится в диапазоне от целевой верхней предельной скорости V_b1 начала операции торможения до целевой нижней предельной скорости V_b2 начала операции торможения. Здесь, устройство 1 помощи при вождении выдает инструкции и помогает при операции отпускания педали акселератора водителем в первый период времени от самого раннего времени до самого позднего времени таким образом, что скорость транспортного средства находится в диапазоне от целевой верхней предельной скорости V_b1 начала операции торможения до целевой нижней предельной скорости V_b2 начала операции торможения, когда транспортное средство 2 входит в диапазон от целевой самой ранней позиции X_b1 начала операции торможения до целевой самой поздней позиции X_b2 начала операции торможения. Следовательно, устройство 1 помощи при вождении обеспечивает возможность предоставлять надлежащие инструкции таким образом, что темп замедления, запрашиваемый в соответствии с операцией торможения, равен или меньше оптимального целевого темпа A_brake замедления при торможении, когда водитель фактически выполняет операцию торможения, чтобы останавливаться в позиции остановки.
[0066] Затем, модуль 53b вычисления целевых величин вычисляет самую раннюю позицию X_a1 для выдачи инструкции по отпусканию педали акселератора и самую позднюю позицию X_a2 для выдачи инструкции по отпусканию педали акселератора на основе целевой самой ранней позиции X_b1 начала операции торможения и целевой самой поздней позиции X_b2 начала операции торможения и заранее установленного указанного темпа A_offbrake замедления при отпускании педали акселератора (ST3).
[0067] Темп A_offbrake замедления при отпускании педали акселератора является темпом замедления транспортного средства 2, когда операция нажатия педали акселератора и операция торможения деактивированы. Темп A_offbrake замедления при отпускании педали акселератора задается заранее в качестве фиксированного значения на основе, например, тормозного крутящего момента двигателя, сформированного посредством сопротивления вращению в двигателе 5, тормозного крутящего момента трансмиссии, сформированного посредством сопротивления вращению в трансмиссии 7, и в случае гибридной системы, к примеру, системы по варианту осуществления, крутящего момента рекуперации электродвигателя, соответствующего величине рекуперации, сформированной посредством электродвигателя-генератора 6.
[0068] Модуль 53b вычисления целевых величин вычисляет самую раннюю позицию X_a1 для выдачи инструкции по отпусканию педали акселератора на основе темпа A_offbrake замедления при отпускании педали акселератора и целевой нижней предельной скорости V_b2 начала операции торможения посредством рассмотрения целевой самой поздней позиции X_b2 начала операции торможения в качестве исходной позиции. Более конкретно, модуль 53b вычисления целевых величин выполняет обратное вычисление позиции для операции отпускания педали акселератора, посредством которой скорость транспортного средства 2 должна становиться целевой нижней предельной скоростью V_b2 начала операции торможения в целевой самой поздней позиции X_b2 начала операции торможения, когда транспортное средство 2 замедляется в темпе A_offbrake замедления при отпускании педали акселератора, и задает ее в качестве самой ранней позиции X_a1 для выдачи инструкции по отпусканию педали акселератора.
[0069] Аналогично, модуль 53b вычисления целевых величин вычисляет самую раннюю позицию X_a1 для выдачи инструкции по отпусканию педали акселератора на основе темпа A_offbrake замедления при отпускании педали акселератора и целевой верхней предельной скорости V_b1 начала операции торможения, посредством рассмотрения целевой самой ранней позиции X_b1 начала операции торможения в качестве исходной позиции. Другими словами, модуль 53b вычисления целевых величин выполняет обратное вычисление позиции для операции отпускания педали акселератора, посредством которой скорость транспортного средства 2 должна становиться целевой верхней предельной скоростью V_b1 начала операции торможения в целевой самой ранней позиции X_b1 начала операции торможения, когда транспортное средство 2 замедляется в темпе A_offbrake замедления при отпускании педали акселератора, и задает ее в качестве самой поздней позиции X_a2 для выдачи инструкции по отпусканию педали акселератора.
[0070] Модуль 53b вычисления целевых величин выводит информацию помощи при вождении, связанную с инструкциями и помощью при отпускании педали акселератора, в первый период времени от самого раннего времени, в которое транспортное средство 2 должно достигать самой ранней позиции X_a1 для выдачи инструкции по отпусканию педали акселератора на текущей скорости, до самого позднего времени, в которое транспортное средство 2 должно достигать самой поздней позиции X_a2 для выдачи инструкции по отпусканию педали акселератора, в HMI-устройство 4. HMI-устройство 4 отображает HMI, связанный с инструкциями и помощью при отпускании педали акселератора, в качестве информации помощи при вождении (ST4), после чего текущий период управления завершается, и процедура переходит к следующему периоду управления.
[0071] Модуль 53b вычисления целевых величин согласно варианту осуществления варьирует режим отображения информации помощи при вождении между первым периодом времени от самого раннего времени до самого позднего времени, которые вычисляются так, как описано выше, и вторым периодом времени от самого позднего времени и далее. Другими словами, модуль 53b вычисления целевых величин переходит между режимом вывода информации помощи при вождении от самого раннего времени до самого позднего времени и режимом вывода информации помощи при вождении от самого позднего времени и далее. Более конкретно, модуль 53b вычисления целевых величин изменяет режим отображения информации помощи при вождении по обе стороны от границы, которая представляет собой самое позднее время.
[0072] Здесь, первый режим вывода информации помощи при вождении в первый период времени является режимом, в котором отображаемая информация помощи при вождении изменяется по мере прохождения времени. Другими словами, первый период времени от самого раннего времени до самого позднего времени является изменяющимся периодом отображения в помощи при вождении на HMI-устройстве 4.
[0073] Модуль 53b вычисления целевых величин постепенно изменяет режим отображения информации помощи при вождении на HMI-устройстве 4 от самого раннего времени до самого позднего времени. Например, как показано в верхней части по фиг. 4 и на фиг. 5, модуль 53b вычисления целевых величин постепенно изменяет цвет 55 фона значка автомобиля на центральном индикаторе, который составляет HMI-устройство 4. Например, модуль 53b вычисления целевых величин постепенно изменяет цвет 55 фона с бесцветного состояния на темно-оранжевый цвет или постепенно увеличивает диапазон цвета 55 фона по мере того, как проходит время от самого раннего времени до самого позднего времени. Таким образом, модуль 53b вычисления целевых величин достигает первого режима отображения информации помощи при вождении в HMI-устройстве 4 в первый период времени от самого раннего времени до самого позднего времени. Следовательно, устройство 1 помощи при вождении может указывать операцию отпускания педали акселератора водителем прогрессивным способом в первый период времени от самого раннего времени до самого позднего времени.
[0074] С другой стороны, второй режим вывода информации помощи при вождении во второй период времени является режимом отображения, который не изменяет информацию помощи при вождении по мере прохождения времени. Другими словами, второй период времени от самого позднего времени и далее является фиксированным периодом времени отображения в помощи при вождении, предоставленной посредством HMI-устройства 4. В этом случае, например, модуль 53b вычисления целевых величин сохраняет цвет 55 фона неизменным в темно-оранжевом цвете. Таким образом, модуль 53b вычисления целевых величин достигает второго режима отображения информации помощи при вождении в HMI-устройстве 4 во второй период времени от самого позднего времени и далее. Следовательно, устройство 1 помощи при вождении может указывать операцию отпускания педали акселератора водителю посредством более интенсивного представления в течение второго периода от самого позднего времени и далее.
[0075] Следовательно, устройство 1 помощи при вождении может выдавать инструкции и помогать при операции отпускания педали акселератора водителем в первый период времени от самого раннего времени до самого позднего времени. Следовательно, устройство 1 помощи при вождении обеспечивает возможность выдавать инструкции и помогать во время операции прекращения ускорения водителем таким образом, что скорость находится в диапазоне от целевой верхней предельной скорости V_b1 начала операции торможения до целевой нижней предельной скорости V_b2 начала операции торможения, когда транспортное средство 2 входит в диапазон от целевой самой ранней позиции X_b1 начала операции торможения до целевой самой поздней позиции X_b2 начала операции торможения. Как результат этого, устройство 1 помощи при вождении обеспечивает возможность предоставлять надлежащие инструкции таким образом, что темп замедления, запрашиваемый в соответствии с операцией торможения, становится оптимальным целевым темпом A_brake замедления при торможении или ниже, когда водитель фактически выполняет операцию торможения, чтобы останавливаться в позиции остановки. Соответственно, устройство 1 помощи при вождении обеспечивает возможность помогать водителю без возникновения у водителя ощущения внезапного торможения, когда водитель выполняет операцию нажатия педали тормоза, и в этом случае может достигаться значительный эффект в отношении снижения расхода топлива.
[0076] Устройство 1 помощи при вождении согласно варианту осуществления обеспечивает возможность достигать надлежащей помощи при вождении, которая подавляет странное ощущение, возникающее у водителя, посредством вывода информации помощи при вождении таким образом, чтобы применять запас для времени указания рекомендованной операции вождения водителю. Более конкретно, устройство 1 помощи при вождении обеспечивает возможность предоставлять помощь при вождении, которая учитывает время реакции до тех пор, пока водитель фактически не выполнит операцию отпускания педали акселератора после наблюдения и оценки дисплея, посредством отображения информации помощи при вождении таким образом, чтобы иметь запас времени, вместо точного определения времени для указания операции отпускания педали акселератора водителю. Время реакции до фактического выполнения операции отпускания педали акселератора зависит от индивидуальных различий между водителями и меняется в зависимости от потребностей для водителя, таких как преобладающая ситуация трафика. Тем не менее, устройство 1 помощи при вождении обеспечивает возможность предоставлять надлежащую помощь при вождении независимо от варьирований во времени реакции и т.п. посредством предоставления помощи при вождении, при которой запас применяется ко времени, когда указывается операция отпускания педали акселератора.
[0077] Кроме того, посредством предоставления помощи при вождении, при которой запас прикладывается ко времени указания операции отпускания педали акселератора, то даже если существует флуктуация в фактическом времени операции отпускания педали акселератора, устройство 1 помощи при вождении обеспечивает возможность сохранять эту флуктуацию в пределах заранее прогнозированного диапазона, и влияние на последующие операции вождения и управления может быть минимизировано. Посредством выдачи инструкций и помощи при операции отпускания педали акселератора в диапазоне первого периода времени от самого раннего времени до самого позднего времени, например, устройство 1 помощи при вождении обеспечивает возможность ограничивать возникновение внезапного торможения, когда, например, операция нажатия педали тормоза выполняется в то время, когда скорость транспортного средства 2 является слишком высокой близко к позиции остановки. Кроме того, посредством выдачи инструкций и помощи при операции отпускания педали акселератора в диапазоне первого периода времени от самого раннего времени до самого позднего времени, устройство 1 помощи при вождении обеспечивает возможность ограничивать возникновение стресса, вызываемого у водителя транспортного средства 2 или у водителя следующего транспортного средства, например, вследствие слишком низкой скорости транспортного средства 2 перед позицией остановки.
[0078] Кроме того, здесь, посредством изменения режима помощи при указании операции отпускания педали акселератора водителю по мере прохождения времени от самого раннего времени, устройство 1 помощи при вождении дает возможность водителю легко понять, что существует запас во времени указания операции отпускания педали акселератора. В результате этого, устройство 1 помощи при вождении позволяет проще передавать помощь при вождении, предоставленную посредством устройства 1 помощи при вождении, водителю, посредством чего может достигаться более надлежащая помощь при вождении.
[0079] Модуль 53c управления мощностью торможения и приведения в движение управляет мощностью торможения и приведения в движение, когда водитель фактически выполняет операцию отпускания педали акселератора в первый период времени от самого раннего времени до самого позднего времени, чтобы регулировать фактический темп замедления транспортного средства 2 таким образом, что он становится указанным темпом A_offbrake замедления при отпускании педали акселератора. Здесь, поскольку система 3 управления транспортного средства является гибридной системой, то модуль 53c управления мощностью торможения и приведения в движение выполняет управление нарастанием рекуперативного торможения двигателем, в котором рекуперация для торможения двигателем выполняется посредством электродвигателя-генератора 6 в дополнение к нормальному торможению двигателем и т.п., так что темп замедления становится указанным темпом A_offbrake замедления при отпускании педали акселератора. Рекуперация для торможения двигателем на основе этого управления нарастанием рекуперативного торможения двигателем фактически имеет незначительный эффект в отношении количества тепла, сформированного во время рекуперации, и, следовательно, фактически имеет относительно высокую эффективность рекуперации по сравнению с рекуперацией при торможении, соответствующей операции нажатия педали тормоза, выполняемой водителем, как описано выше. Следовательно, система 3 управления транспортного средства может обеспечивать относительно длительный период времени для реализации этого управления нарастанием рекуперативного торможения двигателем через выдачу инструкций и помощи при операции отпускания педали акселератора посредством устройства 1 помощи при вождении водителем в соответствующее время, и, следовательно, может ожидаться улучшенный эффект в отношении снижения расхода топлива.
[0080] Кроме того, когда водитель фактически выполняет операцию отпускания педали акселератора в первый период времени от самого раннего времени до самого позднего времени, модуль 53b вычисления целевых величин выводит информацию помощи при вождении, указывающую, что операция отпускания педали акселератора выполнена надлежащим образом в соответствии с управлением нарастанием рекуперативного торможения двигателем, в HMI-устройство 4. HMI-устройство 4 отображает HMI, указывающий, что операция отпускания педали акселератора выполнена надлежащим образом, в качестве информации помощи при вождении, например, посредством изменения цвета 55 фона на зеленый цвет и т.п. Следовательно, устройство 1 помощи при вождении обеспечивает возможность сообщать водителю, что он достигает вождения, которое способствует снижению расхода топлива.
[0081] Система 3 управления транспортного средства обеспечивает возможность получения преимущества в отношении снижения расхода топлива, даже если водитель фактически выполняет операцию отпускания педали акселератора во второй период времени после самого позднего времени. В этом случае, возникают случаи, когда, например, система 3 управления транспортного средства останавливает транспортное средство 2 в позиции остановки также посредством использования фрикционного торможения тормозным устройством 8 в дополнение к рекуперативному торможению электродвигателем-генератором 6 вследствие того факта, что темп замедления, запрашиваемый в соответствии с операцией торможения водителем, превышает целевой темп A_brake замедления при торможении. В этом случае, хотя часть кинетической энергии транспортного средства 2 потребляется в качестве тепловой энергии посредством фрикционного торможения, и, следовательно, эффективность рекуперации кинетической энергии транспортного средства 2 в определенной степени уменьшается, система 3 управления транспортного средства позволяет обеспечивать предписанное преимущество в отношении снижения расхода топлива, поскольку остаток кинетической энергии транспортного средства 2 может быть восстановлен в качестве электрической энергии посредством рекуперативного торможения.
[0082] Согласно варианту осуществления, описанному выше, устройство 1 помощи при вождении содержит HMI-устройство 4, которое допускает вывод информации помощи при вождении для помощи при вождении транспортного средства 2 на основе целевой скорости начала операции торможения транспортного средства 2, и ECU 50, который управляет HMI-устройством 4 и изменяет режим вывода информации помощи при вождении между периодом времени от самого раннего времени на основе целевой скорости начала операции торможения до самого позднего времени, которое основано на целевой скорости начала операции торможения и которое следует после самого раннего времени, и периодом времени от самого позднего времени и далее.
[0083] Согласно варианту осуществления, описанному выше, устройство 1 помощи при вождении содержит HMI-устройство 4, которое может выводить информацию помощи при вождении для помощи при вождении транспортного средства 2 на основе целевой скорости начала операции торможения транспортного средства 2, и ECU 50, который управляет HMI-устройством 4, чтобы изменять режим вывода информации помощи при вождении по мере прохождения времени от самого раннего времени на основе целевой скорости начала операции торможения.
[0084] Следовательно, устройство 1 помощи при вождении обеспечивает возможность помогать водителю в вождении транспортного средства 2 легкодоступным способом в соответствующее время, и, следовательно, может предоставляться надлежащая помощь при вождении, например, помощь в экономичном вождении водителя может предоставляться надлежащим образом, за счет этого уменьшая использование топлива и снижая расход топлива.
[0085] В описании, приведенном выше, устройство 1 помощи при вождении описывается посредством рассмотрения транспортного средства 2 как гибридного транспортного средства, но изобретение не ограничено этим и также может предоставлять помощь при вождении надлежащим образом в традиционном транспортном средстве или электромобиле (EV).
[0086] ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 6 является блок-схемой последовательности операций способа, показывающей один пример управления, выполняемого посредством ECU, связанного со вторым вариантом осуществления; и фиг. 7 является схематичным чертежом, показывающим один пример режима помощи и взаимосвязь между оставшимся расстоянием до позиции остановки и скоростью транспортного средства в системе управления транспортного средства, связанной со вторым вариантом осуществления. Устройство помощи при вождении, связанное со вторым вариантом осуществления, отличается от первого варианта осуществления тем, что темп замедления транспортного средства изменяется в состоянии, в котором операция запроса на ускорение и операция запроса на торможение относительно транспортного средства отменяются. Кроме этого, дублированное описание структуры, действий и преимуществ, которые являются общими с вариантом осуществления, описанным выше, опускаются в максимально возможной степени. Кроме того, следует обратиться к фиг. 1 и 2 и т.д. относительно соответствующих структурных частей устройства помощи при вождении, связанного со вторым вариантом осуществления (то же применяется ниже).
[0087] Устройство 201 помощи при вождении, связанное с вариантом осуществления, может изменять темп замедления транспортного средства 2, когда операция ускорения и операция торможения деактивированы, другими словами, темп A_offbrake замедления при отпускании педали акселератора. Как указано выше, темп A_offbrake замедления при отпускании педали акселератора определяется на основе тормозного крутящего момента двигателя, сформированного посредством сопротивления вращению в двигателе 5, тормозного крутящего момента трансмиссии, сформированного посредством сопротивления вращению в трансмиссии 7, и в случае гибридной системы, как в варианте осуществления, крутящего момента рекуперации электродвигателя, соответствующего величине рекуперации электродвигателя-генератора 6, и т.п. Устройство 201 помощи при вождении обеспечивает возможность изменять темп A_offbrake замедления при отпускании педали акселератора, например, посредством изменения передаточного числа (передачи) трансмиссии 7 и/или величины рекуперации электродвигателя-генератора 6.
[0088] Устройство 201 помощи при вождении изменяет темп A_offbrake замедления при отпускании педали акселератора в соответствии с оставшимся расстоянием до позиции остановки во время фактической операции отпускания педали акселератора водителем. Следовательно, при условии, что фактическая операция отпускания педали акселератора выполняется в первый период времени от самого раннего времени до самого позднего времени, устройство 201 помощи при вождении обеспечивает возможность задавать комбинацию фактической позиции начала операции торможения и скорости начала операции торможения практически идентичной независимо от времени операции отпускания педали акселератора. Другими словами, устройство 201 помощи при вождении обеспечивает возможность достигать надлежащей комбинации позиции начала операции торможения и скорости начала операции торможения посредством регулирования темпа A_offbrake замедления при отпускании педали акселератора, даже если существует варьирование во времени фактической операции отпускания педали акселератора в первый период времени от самого раннего времени до самого позднего времени.
[0089] В устройстве 201 помощи при вождении согласно варианту осуществления, ECU 50 выступает в качестве устройства управления темпом замедления, а также устройства управления помощью. ECU 50 изменяет темп A_offbrake замедления при отпускании педали акселератора посредством изменения передаточного числа (шестерни) трансмиссии 7 и величины рекуперации электродвигателя-генератора 6 ступенчатым способом. Здесь, например, ECU 50 может изменять темп A_offbrake замедления при отпускании педали акселератора за два шага, а именно, как первый темп замедления, который является темпом A_offbrakeD замедления в диапазоне движения при отпускании педали акселератора, и второй темп замедления, который является темпом A_offbrakeB замедления в диапазоне торможения при отпускании педали акселератора. Темп A_offbrakeD замедления в диапазоне движения при отпускании педали акселератора соответствует темпу замедления при отпускании педали акселератора, когда диапазон движения выбирается в качестве диапазона переключения передач. Темп A_offbrakeB замедления в диапазоне торможения при отпускании педали акселератора соответствует темпу замедления при отпускании педали акселератора, когда диапазон торможения выбирается в качестве диапазона переключения передач, и является темпом замедления, имеющим большее абсолютное значение относительно темпа A_offbrakeD замедления в диапазоне движения при отпускании педали акселератора. ECU 50 изменяет время переключения между темпом A_offbrakeD замедления в диапазоне движения при отпускании педали акселератора и темпом A_offbrakeB замедления в диапазоне торможения при отпускании педали акселератора, в соответствии со временем фактической операции отпускания педали акселератора водителем.
[0090] Ниже, со ссылкой на фиг. 6 и 7, описывается один пример вычисления самого раннего времени и самого позднего времени посредством модуля 53b вычисления целевых величин согласно варианту осуществления, а также помощи и инструкций посредством HMI-устройства 4.
[0091] Модуль 53b вычисления целевых величин вычисляет самое раннее время и самое позднее время на основе целевой величины состояния движения и темпа замедления при отпускании педали акселератора. Кроме того, здесь, как указано выше, целевая величина состояния движения является целевой скоростью начала операции торможения, на которой рекомендуется операция торможения водителем, и модуль 53b вычисления целевых величин согласно варианту осуществления вычисляет самое раннее время и самое позднее время на основе идентичной целевой скорости начала операции торможения и различных темпов замедления при отпускании педали акселератора.
[0092] Как показано на фиг. 6 и 7, во-первых, модуль 53b вычисления целевых величин вычисляет целевую скорость V_b начала операции торможения на основе текущей скорости V_now (скорости приближения) транспортного средства 2 (ST21). Модуль 53b вычисления целевых величин умножает скорость V_now транспортного средства на предписанный коэффициент скорости, чтобы вычислять целевую скорость V_b начала операции торможения. Коэффициент скорости, например, задается таким образом, что целевая скорость V_b начала операции торможения является скоростью, на которой у водителя транспортного средства 2 и у водителя следующего транспортного средства не возникает ощущение внезапного торможения, когда выполняется операция нажатия педали тормоза, и скоростью, на которой транспортное средство 2 может достигать позиции остановки без вызывания стресса вследствие слишком низкой скорости транспортного средства 2.
[0093] Затем, модуль 53b вычисления целевых величин вычисляет целевую позицию X_b начала операции торможения в качестве предписанного местоположения на основе целевой скорости V_b начала операции торможения и заранее установленного целевого темпа A_brake замедления при торможении (ST22).
[0094] Модуль 53b вычисления целевых величин вычисляет целевую позицию X_b начала операции торможения на основе целевой скорости V_b начала операции торможения и целевого темпа A_brake замедления при торможении посредством рассмотрения позиции остановки, соответствующей оставшемуся расстоянию, регулируемому посредством модуля 53a регулирования, в качестве исходной позиции. Другими словами, модуль 53b вычисления целевых величин выполняет обратное вычисление позиции начала операции торможения, посредством которой транспортное средство 2 останавливается в позиции остановки, когда транспортное средство 2, движущееся на целевой скорости V_b начала операции торможения, замедляется при целевом темпе A_brake замедления при торможении посредством операции торможения, и задает ее в качестве целевой позиции X_b начала операции торможения. Комбинация целевой позиции X_b начала операции торможения, которая является предписанным местоположением, и целевой скорости V_b начала операции торможения, которая является целевой величиной состояния движения, соответствует комбинации позиции начала операции торможения и скорости начала операции торможения, посредством которой транспортное средство может приближаться к позиции остановки при оптимальном целевом темпе A_brake замедления при торможении, когда водитель выполняет операцию торможения.
[0095] После этого модуль 53b вычисления целевых величин вычисляет самую раннюю позицию X_a1 для выдачи инструкции по отпусканию педали акселератора и самую позднюю позицию X_a2 для выдачи инструкции по отпусканию педали акселератора на основе целевой позиции X_b начала операции торможения и заранее установленного темпа A_offbrakeD замедления в диапазоне движения при отпускании педали акселератора и темпа A_offbrakeB замедления в диапазоне торможения при отпускании педали акселератора (ST23).
[0096] Модуль 53b вычисления целевых величин вычисляет самую раннюю позицию X_a1 для выдачи инструкции по отпусканию педали акселератора на основе темпа A_offbrakeD замедления в диапазоне движения при отпускании педали акселератора и целевой скорости V_b начала операции торможения посредством рассмотрения целевой позиции X_b начала операции торможения в качестве исходной позиции. Другими словами, модуль 53b вычисления целевых величин выполняет обратное вычисление позиции отпускания педали акселератора, в которой скорость транспортного средства 2 может переключаться на целевую скорость V_b начала операции торможения в целевой позиции X_b начала операции торможения, когда транспортное средство 2 замедляется в темпе A_offbrakeD замедления в диапазоне движения при отпускании педали акселератора, и задает ее в качестве самой ранней позиции X_a1 для выдачи инструкции по отпусканию педали акселератора.
[0097] Аналогично, модуль 53b вычисления целевых величин вычисляет самую позднюю позицию X_a2 для выдачи инструкции по отпусканию педали акселератора на основе темпа A_offbrakeB замедления в диапазоне торможения при отпускании педали акселератора и целевой скорости V_b начала операции торможения посредством рассмотрения целевой позиции X_b начала операции торможения в качестве исходной позиции. Более конкретно, модуль 53b вычисления целевых величин выполняет обратное вычисление позиции для операции отпускания педали акселератора, посредством которой скорость транспортного средства 2 может переключаться на целевую скорость V_b начала операции торможения в целевой позиции X_b начала операции торможения, когда транспортное средство 2 замедляется в темпе A_offbrakeB замедления в диапазоне торможения при отпускании педали акселератора, и она задается в качестве самой поздней позиции X_a2 для выдачи инструкции по отпусканию педали акселератора.
[0098] Модуль 53b вычисления целевых величин выводит, в HMI-устройство 4, информацию помощи при вождении, связанную с инструкциями и помощью при отпускании педали акселератора, в первый период времени от самого раннего времени, в которое транспортное средство 2 достигает самой ранней позиции X_a1 для выдачи инструкции по отпусканию педали акселератора на текущей скорости, до самого позднего времени, в которое транспортное средство 2 достигает самой поздней позиции X_a2 для выдачи инструкции по отпусканию педали акселератора на текущей скорости. HMI-устройство 4 отображает HMI, связанный с инструкциями и помощью при отпускании педали акселератора, в качестве информации помощи при вождении (ST24).
[0099] Модуль 53b вычисления целевых величин варьирует режим отображения информации помощи и инструкций между первым периодом времени от самого раннего времени до самого позднего времени, вычисленными так, как описано выше, и вторым периодом времени от самого позднего времени и далее. Первый режим вывода информации помощи при вождении в первый период времени является режимом, который изменяет отображаемую информацию помощи при вождении по мере прохождения времени. С другой стороны, второй режим вывода информации помощи при вождении во второй период времени является режимом отображения, в котором информация помощи при вождении не изменяется по мере прохождения времени. Следовательно, устройство 201 помощи при вождении обеспечивает возможность выдавать инструкции и помогать при операции отпускания педали акселератора водителем в первый период времени от самого раннего времени до самого позднего времени.
[0100] Модуль 53c управления мощностью торможения и приведения в движение управляет мощностью торможения и приведения в движение, когда водитель фактически выполняет операцию отпускания педали акселератора в первый период времени от самого раннего времени до самого позднего времени, чтобы регулировать фактический темп замедления транспортного средства 2 таким образом, что он становится указанным темпом A_offbrakeD замедления в диапазоне движения при отпускании педали акселератора. В ходе этого, модуль 53c управления мощностью торможения и приведения в движение выполняет управление нарастанием рекуперативного торможения двигателем таким образом, чтобы выполнять рекуперацию для торможения двигателем посредством электродвигателя-генератора 6, в дополнение к нормальному торможению двигателем и т.п.
[0101] Модуль 53c управления мощностью торможения и приведения в движение согласно варианту осуществления вычисляет время, в которое следует переключать темп замедления при отпускании педали акселератора, на основе текущей скорости V_now транспортного средства 2 и оставшегося расстояния L до позиции остановки от текущей позиции X_r во время фактической операции отпускания педали акселератора водителем. Модуль 53c управления мощностью торможения и приведения в движение переключает темп замедления при отпускании педали акселератора с темпа A_offbrakeD замедления в диапазоне движения при отпускании педали акселератора на темп A_offbrakeB замедления в диапазоне торможения при отпускании педали акселератора, например, во время, когда устанавливается неравенство в нижеприведенном выражении (1). Модуль 53c управления мощностью торможения и приведения в движение регулирует фактический темп замедления транспортного средства 2 таким образом, что он становится темпом A_offbrakeB замедления в диапазоне торможения при отпускании педали акселератора (ST25), текущий период управления завершается, и процедура переходит к следующему периоду управления.
[0102] (Выражение 1)

[0103] В вышеприведенном выражении (1) [V_now] представляет текущую скорость транспортного средства 2, когда водитель выполняет операцию отпускания педали акселератора. [V_b] представляет целевую скорость начала операции торможения. [A_offbrakeB] представляет темп замедления в диапазоне торможения при отпускании педали акселератора. [L] представляет оставшееся расстояние от текущей позиции до позиции остановки во время фактической операции отпускания педали акселератора, выполняемой водителем. [X_b] представляет целевую позицию начала операции торможения.
[0104] Устройство 201 помощи при вождении, имеющее структуру, описанную выше, может выдавать инструкции и помогать во время операции отпускания педали акселератора водителем таким образом, что скорость транспортного средства становится целевой скоростью V_b начала операции торможения, когда транспортное средство 2 достигает целевой позиции X_b начала операции торможения, посредством отображения информации помощи при вождении в первом режиме в течение первого периода времени от самого раннего времени до самого позднего времени. В результате этого, устройство 201 помощи при вождении может предоставлять надлежащие инструкции таким образом, что темп замедления, запрашиваемый в соответствии с операцией торможения, равен или меньше оптимального целевого темпа A_brake замедления при торможении, когда водитель фактически выполняет операцию торможения, чтобы останавливаться в позиции остановки, и, следовательно, можно достигать значительного преимущества в отношении снижения расхода топлива.
[0105] В этом случае устройство 201 помощи при вождении определяет самое раннее время и самое позднее время на основе идентичной целевой скорости начала операции торможения и различных темпов замедления при отпускании педали акселератора, и, следовательно, первый период времени от самого раннего времени до самого позднего времени может задаваться равным относительно длительному периоду времени. Следовательно, устройство 201 помощи при вождении может не допускать укорачивания первого периода времени от самого раннего времени до самого позднего времени и, следовательно, обеспечивает возможность предоставлять более надлежащую помощь при вождении водителю.
[0106] Даже если существует варьирование во времени фактической операции отпускания педали акселератора в первый период времени от самого раннего времени до самого позднего времени, устройство 201 помощи при вождении может достигать надлежащей комбинации фактической позиции начала операции торможения и скорости начала операции торможения посредством регулирования темпа замедления при отпускании педали акселератора. Другими словами, устройство 201 помощи при вождении обеспечивает возможность задавать комбинацию фактической позиции начала операции торможения и скорости начала операции торможения практически идентичной независимо от времени операции отпускания педали акселератора при условии, что фактическая операция отпускания педали акселератора выполняется в первый период времени от самого раннего времени до самого позднего времени. В результате этого, устройство 201 помощи при вождении обеспечивает возможность подавлять возникновение варьирования в комбинации фактической позиции начала операции торможения и скорости начала операции торможения относительно комбинации целевой позиции начала операции торможения и целевой скорости начала операции торможения, посредством которой транспортное средство может приближаться к позиции остановки при оптимальном целевом темпе A_brake замедления при торможении, когда водитель выполняет операцию торможения.
[0107] Устройство 201 помощи при вождении согласно варианту осуществления, описанному выше, обеспечивает возможность помогать водителю в вождении транспортного средства 2 легкодоступным способом в соответствующее время, и, следовательно, может достигаться надлежащая помощь при вождении, например, помощь в экономичном вождении водителя может предоставляться надлежащим образом, за счет этого подавляя использование топлива и снижая расход топлива.
[0108] Кроме того, согласно устройству 201 помощи при вождении, связанному с вариантом осуществления, описанным выше, целевая величина состояния движения является целевой скоростью начала операции торможения, и самое раннее время и самое позднее время вычисляются на основе идентичной целевой скорости начала операции торможения и различных темпов замедления при отпускании педали акселератора. Следовательно, устройство 201 помощи при вождении может не допускать укорачивания первого периода времени от самого раннего времени до самого позднего времени и, следовательно, обеспечивает возможность предоставлять более надлежащую помощь при вождении водителю.
[0109] Кроме того, в устройстве 201 помощи при вождении, связанном с вариантом осуществления, описанным выше, ECU 50 предоставляется с возможностью управлять темпом замедления транспортного средства 2 до тех пор, пока не будет выполнена операция торможения, в соответствии со временем операции отпускания педали акселератора (временем отмены) в течение первого периода времени от самого раннего времени до самого позднего времени. Следовательно, устройство 201 помощи при вождении обеспечивает возможность не допускать отличие комбинации позиции начала операции торможения и скорости начала операции торможения от целевой комбинации, и, следовательно, возникновение варьирования в комбинации фактической позиции начала операции торможения и скорости начала операции торможения может подавляться, и можно не допускать возникновения странного ощущения у водителя.
[0110] ТРЕТИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 8 является блок-схемой последовательности операций способа, показывающей один пример управления посредством ECU, связанного с третьим вариантом осуществления, и фиг. 9 является схематичным чертежом одного примера режима помощи и взаимосвязи между оставшимся расстоянием до позиции остановки и скоростью транспортного средства в системе управления транспортного средства, связанной с третьим вариантом осуществления. Устройство помощи при вождении, связанное с третьим вариантом осуществления, отличается от второго варианта осуществления тем, что темп замедления транспортного средства может быть изменен непрерывным (бесступенчатым) способом.
[0111] В устройстве 301 помощи при вождении согласно варианту осуществления, ECU 50 также служит в качестве устройства управления темпом замедления, а также устройства управления помощью. ECU 50 согласно варианту осуществления изменяет темп A_offbrake замедления при отпускании педали акселератора непрерывным способом посредством непрерывного изменения передаточного отношения (передачи) трансмиссии 7 и величины рекуперации в электродвигателе-генераторе 6. Если система 3 управления транспортного средства, к которой применяется это устройство 301 помощи при вождении, имеет такую конструкцию, чтобы изменять темп A_offbrake замедления при отпускании педали акселератора непрерывно посредством непрерывного изменения передаточного отношения ECU 50 трансмиссии 7, то бесступенчатая AT и т.п., которая может непрерывно изменять передаточное отношение, приспосабливается в качестве трансмиссии 7.
[0112] Здесь, например, ECU 50 обеспечивает возможность изменять темп A_offbrake замедления при отпускании педали акселератора непрерывно между темпом A_offbrakeD замедления в диапазоне движения при отпускании педали акселератора и темпом A_offbrakeB замедления в диапазоне торможения при отпускании педали акселератора.
[0113] Ниже описываются примеры вычисления самого раннего времени и самого позднего времени посредством модуля 53b вычисления целевых величин и выдачи инструкций для помощи посредством HMI-устройства 4 согласно варианту осуществления со ссылкой на фиг. 8 и 9.
[0114] Модуль 53b вычисления целевых величин вычисляет самое раннее время и самое позднее время на основе идентичной целевой скорости начала операции торможения и различных темпов замедления при отпускании педали акселератора, как описано выше. Модуль 53b вычисления целевых величин выводит, в HMI-устройство 4, информацию помощи при вождении, связанную с инструкциями и помощью при отпускании педали акселератора, в первый период времени от самого раннего времени, в которое транспортное средство 2 достигает самой ранней позиции X_a1 для выдачи инструкции по отпусканию педали акселератора на текущей скорости, до самого позднего времени, в которое транспортное средство 2 достигает самой поздней позиции X_a2 для выдачи инструкции по отпусканию педали акселератора на текущей скорости. HMI-устройство 4 отображает HMI, связанный с инструкциями и помощью при отпускании педали акселератора, в качестве информации помощи при вождении (ST24).
[0115] Модуль 53b вычисления целевых величин изменяет режим отображения информации помощи при вождении между первым периодом времени от самого раннего времени до самого позднего времени, которые вычислены, и вторым периодом времени от самого позднего времени и далее. Первый режим вывода информации помощи при вождении в первый период времени является режимом, в котором отображаемая информация помощи при вождении изменяется по мере прохождения времени. С другой стороны, второй режим вывода информации помощи при вождении во второй период времени является режимом отображения, который не изменяет информацию помощи при вождении по мере прохождения времени. Следовательно, устройство 301 помощи при вождении может выдавать инструкции и помогать при операции отпускания педали акселератора водителем в первый период времени от самого раннего времени до самого позднего времени.
[0116] Модуль 53c управления мощностью торможения и приведения в движение управляет мощностью торможения и приведения в движение, когда водитель фактически выполняет операцию отпускания педали акселератора в первый период времени от самого раннего времени до самого позднего времени, чтобы регулировать фактический темп замедления транспортного средства 2 таким образом, что он становится оптимальным темпом замедления между темпом A_offbrakeD замедления в диапазоне движения при отпускании педали акселератора и диапазоном A_offbrakeB замедления в диапазоне торможения при отпускании педали акселератора. В ходе этого, модуль 53c управления мощностью торможения и приведения в движение выполняет управление нарастанием рекуперативного торможения двигателем таким образом, чтобы выполнять рекуперацию для торможения двигателем посредством электродвигателя-генератора 6, в дополнение к нормальному торможению двигателем и т.п.
[0117] Модуль 53c управления мощностью торможения и приведения в движение согласно варианту осуществления вычисляет целевой темп замедления при отпускании педали акселератора на основе текущей скорости V_now транспортного средства 2 и оставшегося расстояния L до позиции остановки от текущей позиции X_r во время фактической операции отпускания педали акселератора, выполняемой водителем, и регулирует фактический темп замедления при отпускании педали акселератора таким образом, что он становится целевым темпом замедления при отпускании педали акселератора (ST35), после чего текущий период управления завершается, и процедура переходит к следующему периоду управления. Модуль 53c управления мощностью торможения и приведения в движение использует, например, нижеприведенное выражение (2), для того чтобы вычислять целевой темп A_targetoffbrake замедления при отпускании педали акселератора.
[0118] (Выражение 2)
[0119] В вышеприведенном выражении (2), [A_targetoffbrake] представляет целевой темп замедления при отпускании педали акселератора. [V_now] представляет текущую скорость транспортного средства 2, когда водитель выполняет операцию отпускания педали акселератора. [V_b] представляет целевую скорость начала операции торможения. [L] представляет оставшееся расстояние до позиции остановки от текущей позиции во время фактической операции отпускания педали акселератора, выполняемой водителем. [X_b] представляет целевую позицию начала операции торможения.
[0120] Устройство 301 помощи при вождении, сконфигурированное так, как описано выше, обеспечивает возможность выдавать инструкции и помогать во время операции отпускания педали акселератора водителем таким образом, что скорость транспортного средства становится целевой скоростью V_b начала операции торможения, когда транспортное средство 2 достигает целевой позиции X_b начала операции торможения, посредством отображения информации помощи при вождении в первом режиме в течение первого периода времени от самого раннего времени до самого позднего времени. В результате этого, устройство 301 помощи при вождении может предоставлять надлежащие инструкции таким образом, что темп замедления, запрашиваемый в соответствии с операцией торможения, равен или меньше оптимального целевого темпа A_brake замедления при торможении, когда водитель фактически выполняет операцию торможения, чтобы останавливаться в позиции остановки, и, следовательно, обеспечивает возможность достигать значительного преимущества в отношении снижения расхода топлива.
[0121] В этом случае, устройство 301 помощи при вождении обеспечивает возможность задавать первый период времени от самого раннего времени до самого позднего времени равным относительно длительному периоду, поскольку самое раннее время и самое позднее время определяются на основе идентичной целевой скорости начала операции торможения и различных темпов замедления при отпускании педали акселератора. Следовательно, устройство 301 помощи при вождении может не допускать укорачивания первого периода времени от самого раннего времени до самого позднего времени и, следовательно, обеспечивает возможность предоставлять более надлежащую помощь при вождении водителю.
[0122] Устройство 301 помощи при вождении обеспечивает возможность достигать надлежащей комбинации фактической позиции начала операции торможения и скорости начала операции торможения посредством регулирования темпа замедления при отпускании педали акселератора непрерывно в соответствии со временем фактической операции отпускания педали акселератора, даже если существует варьирование во времени фактической операции отпускания педали акселератора в первый период времени от самого раннего времени до самого позднего времени. Другими словами, устройство 301 помощи при вождении обеспечивает возможность задавать комбинацию фактической позиции начала операции торможения и скорости начала операции торможения практически идентичной независимо от времени операции отпускания педали акселератора и других внешних возмущений (например, варьирования сопротивления поверхности дороги или сопротивления воздуха) и т.п. при условии, что фактическая операция отпускания педали акселератора выполняется в первый период времени от самого раннего времени до самого позднего времени. В результате этого, устройство 301 помощи при вождении обеспечивает возможность ограничивать возникновение варьирования в комбинации фактической позиции начала операции торможения и скорости начала операции торможения относительно комбинации целевой позиции начала операции торможения и целевой скорости начала операции торможения, посредством которой транспортное средство может приближаться к позиции остановки при оптимальном целевом темпе A_brake замедления при торможении, когда водитель выполняет операцию торможения.
[0123] Устройство 301 помощи при вождении, связанное с вариантом осуществления, описанным выше, обеспечивает возможность помогать водителю в вождении транспортного средства 2 легкодоступным способом в соответствующее время, и, следовательно, может предоставляться надлежащая помощь при вождении, например, помощь в экономичном вождении водителя может предоставляться надлежащим образом, за счет этого уменьшая использование топлива и снижая расход топлива.
[0124] Кроме того, в устройстве 301 помощи при вождении, связанном с вариантом осуществления, описанным выше, целевая величина состояния движения является целевой скоростью начала операции торможения, и самое раннее время и самое позднее время вычисляются на основе идентичной целевой скорости начала операции торможения и различных темпов замедления при отпускании педали акселератора. Следовательно, устройство 301 помощи при вождении может не допускать укорачивания первого периода времени от самого раннего времени до самого позднего времени и, следовательно, обеспечивает возможность предоставлять более надлежащую помощь при вождении водителю.
[0125] Кроме того, устройство 301 помощи при вождении, связанное с вариантом осуществления, описанным выше, содержит ECU 50, который управляет темпом замедления транспортного средства 2 до тех пор, пока не будет выполнена операция торможения, в соответствии со временем отпускания педали акселератора (временем отмены) в первый период времени от самого раннего времени до самого позднего времени. Следовательно, устройство 301 помощи при вождении обеспечивает возможность не допускать отличие комбинации позиции начала операции торможения и скорости начала операции торможения от целевой комбинации, и, следовательно, возникновение варьирования в комбинации фактической позиции начала операции торможения и скорости начала операции торможения может подавляться, и можно не допускать возникновения странного ощущения у водителя.
[0126] Устройство помощи при вождении, связанное с вариантами осуществления изобретения, описанными выше, не ограничено вариантами осуществления, приведенными выше, и различные модификации могут выполняться в пределах объема формулы изобретения. Конструкция устройства помощи при вождении, связанного с вариантами осуществления, может формироваться посредством надлежащего комбинирования составляющих элементов вариантов осуществления, описанных выше.
[0127] В описании, приведенном выше, устройство управления помощью и устройство управления темпом замедления описываются как совместно используемые с ECU 50, но изобретение не ограничено этим. Например, устройство управления помощью и устройство управления темпом замедления, соответственно, могут конструироваться отдельно от ECU 50 и взаимно обмениваться такой информацией, как сигналы определения, сигналы приведения в действие, команды управления и т.п.
[0128] В описании, приведенном выше, первый режим вывода информации помощи при вождении в первый период времени является режимом, который изменяет информацию помощи при вождении по мере прохождения времени, тогда как второй режим вывода информации помощи при вождении во второй период времени является режимом, который не изменяет информацию помощи при вождении по мере прохождения времени, но изобретение не ограничено этим. Первый режим и второй режим не ограничены вышеприведенным и могут быть различными режимами.
[0129] В описании, приведенном выше, целевая величина состояния движения является целевой скоростью начала операции торможения, которая является рекомендованной скоростью транспортного средства, на которой рекомендуется операция торможения (операция запроса на торможение) пользователем, но изобретение не ограничено этим. Целевая величина состояния движения может быть целевой величиной состояния, которая указывает состояние движения транспортного средства, например, она может быть ускорением целевого транспортного средства или темпом замедления, целевым передаточным числом (целевой передачей), целевым углом поворота при рулении и т.п.
[0130] В описании, приведенном выше, рекомендованная операция вождения, является операцией, которую выдает устройство помощи при вождении и помогает выполнять водителю, другими словами, вождение с помощью устройства помощи при вождении, является операцией отпускания педали акселератора (отменой операции запроса на ускорение), выполняемой водителем, но изобретение не ограничено этим. Рекомендованная операция вождения, для которой устройство помощи при вождении выдает инструкции и которую помогает водителю выполнять, может быть, например, операцией запроса на ускорение, операцией запроса на торможение, операцией отмены запроса на торможение, операцией переключения передач, операцией руления и т.п.
[0131] В описании, приведенном выше, устройство помощи при вождении выводит визуальную информацию в качестве информации помощи при вождении, но изобретение не ограничено этим. Устройство помощи при вождении также может выводить звуковую информацию или тактильную информацию, например, в качестве информации помощи при вождении и может надлежащим образом варьировать режим этой звуковой информации или тактильной информации.
[0132] В описании, приведенном выше, самое раннее время и самое позднее время вычисляются на основе идентичного темпа замедления при отпускании педали акселератора и различных целевых скоростей начала операции торможения или на основе идентичной целевой скорости начала операции торможения и различных темпов замедления при отпускании педали акселератора, но изобретения не ограничено этим. Например, самое раннее время и самое позднее время могут быть вычислены на основе различных темпов замедления при отпускании педали акселератора и различных скоростей начала операции торможения.
[0133] 1, 201, 301 - устройство помощи при вождении
2 - транспортное средство
3 - система управления транспортного средства
4 - HMI-устройство (устройство помощи)
5 - двигатель (двигатель внутреннего сгорания)
6 - электродвигатель-генератор
13 - GPS-устройство
14 - устройство беспроводной связи
15 - база данных
50 - ECU (устройство управления помощью, устройство управления темпом замедления)
51 - модуль вычисления первой информации
52 - модуль вычисления второй информации
53 - модуль управления транспортного средства
54 - CAN
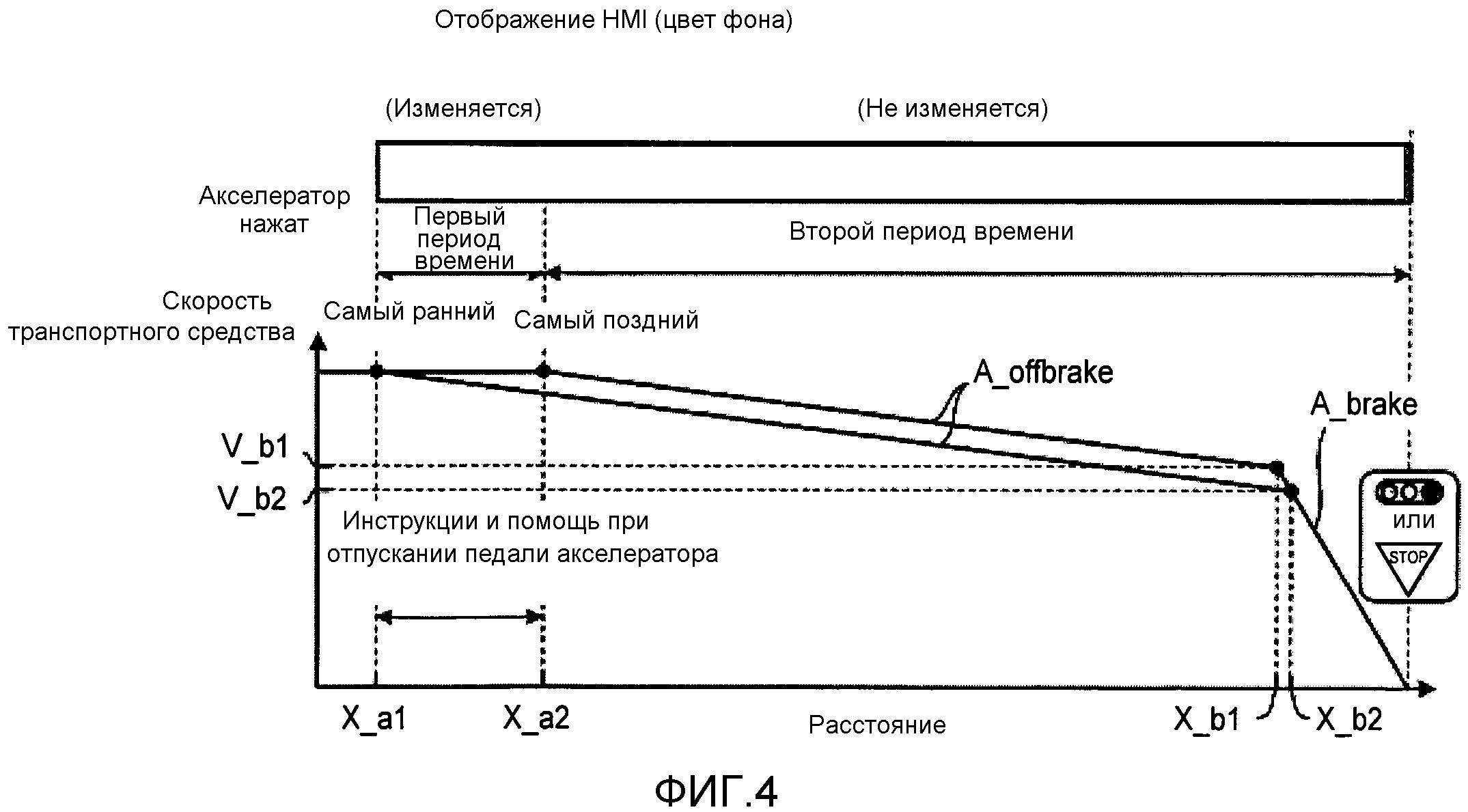
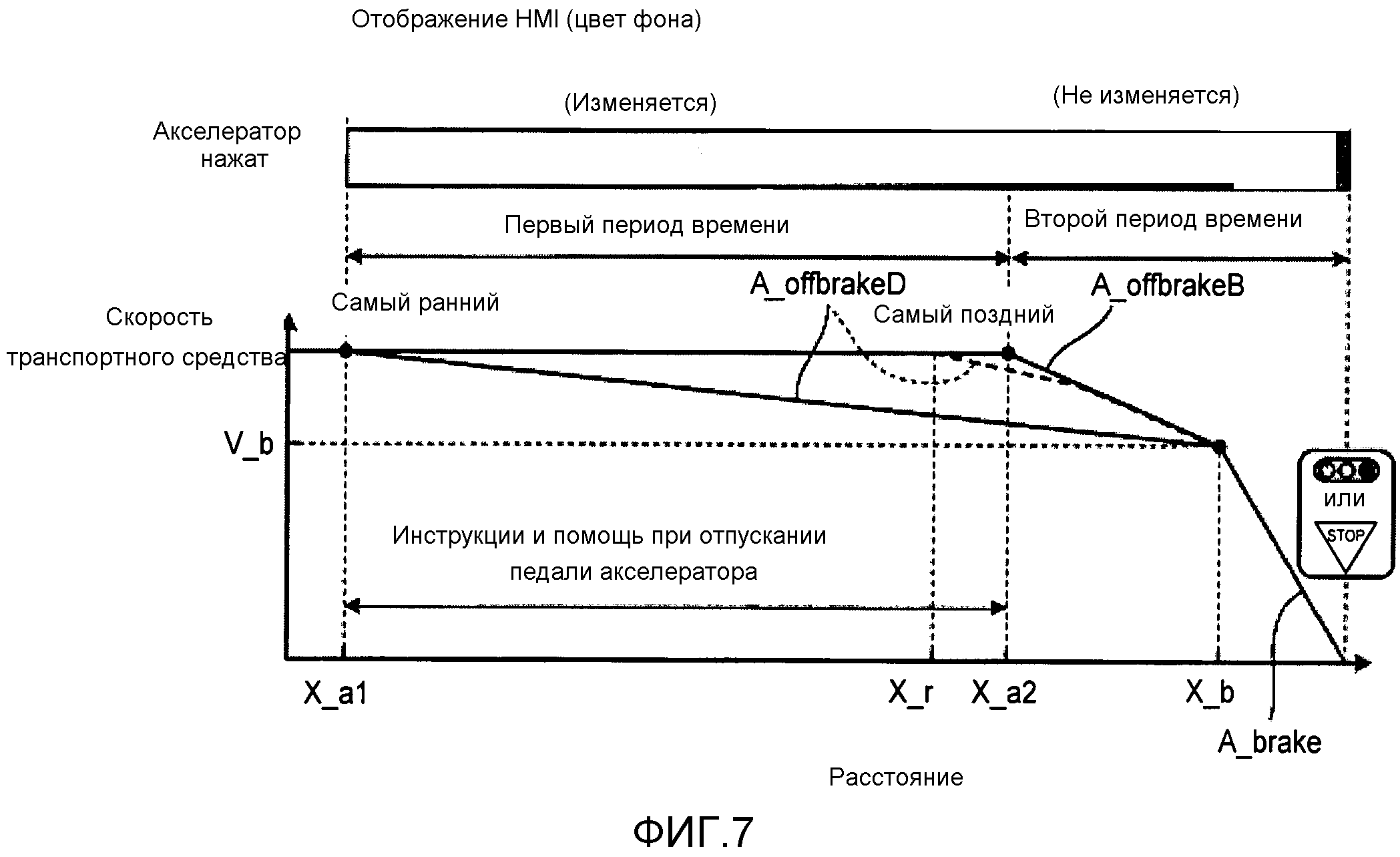
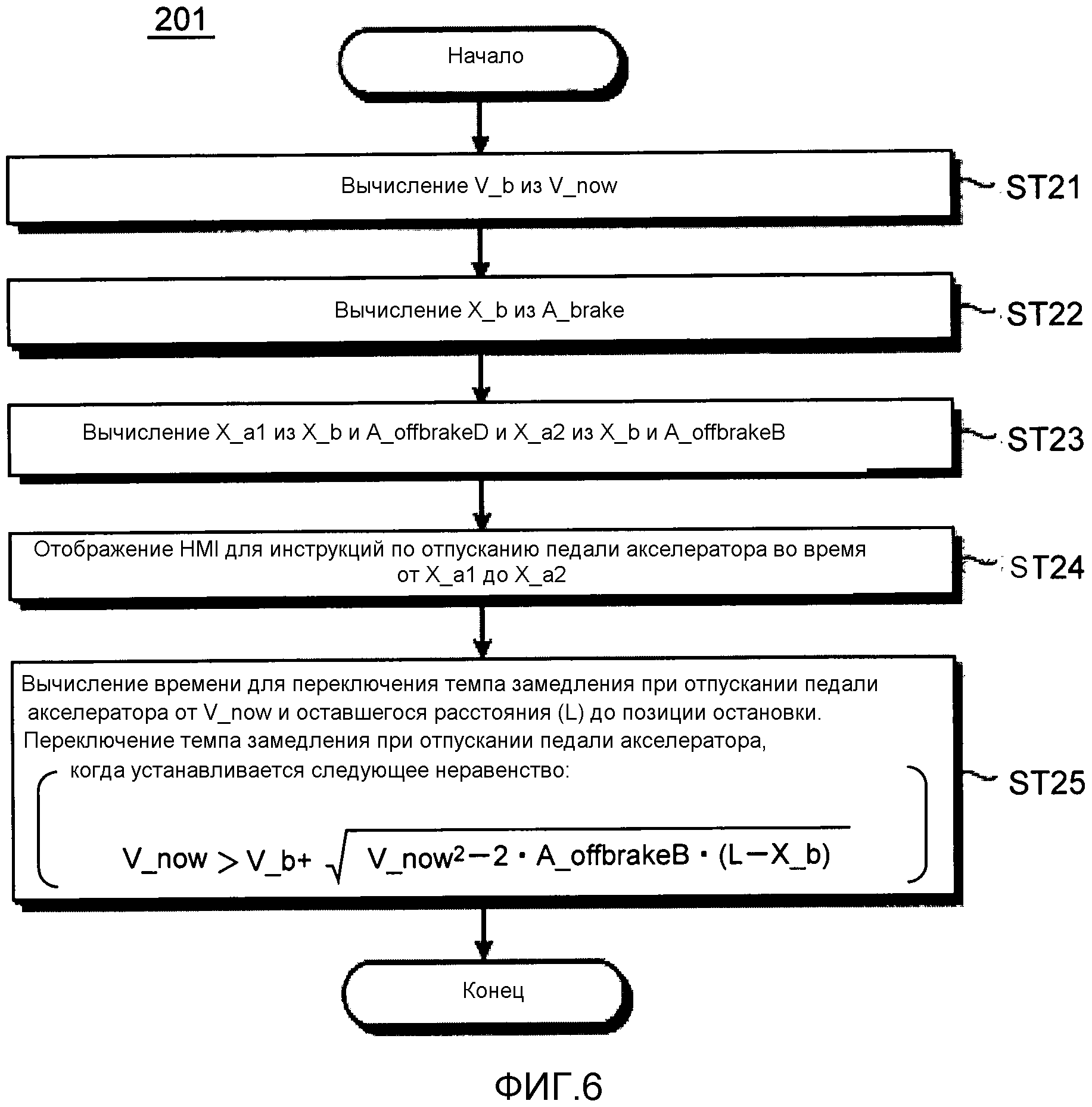
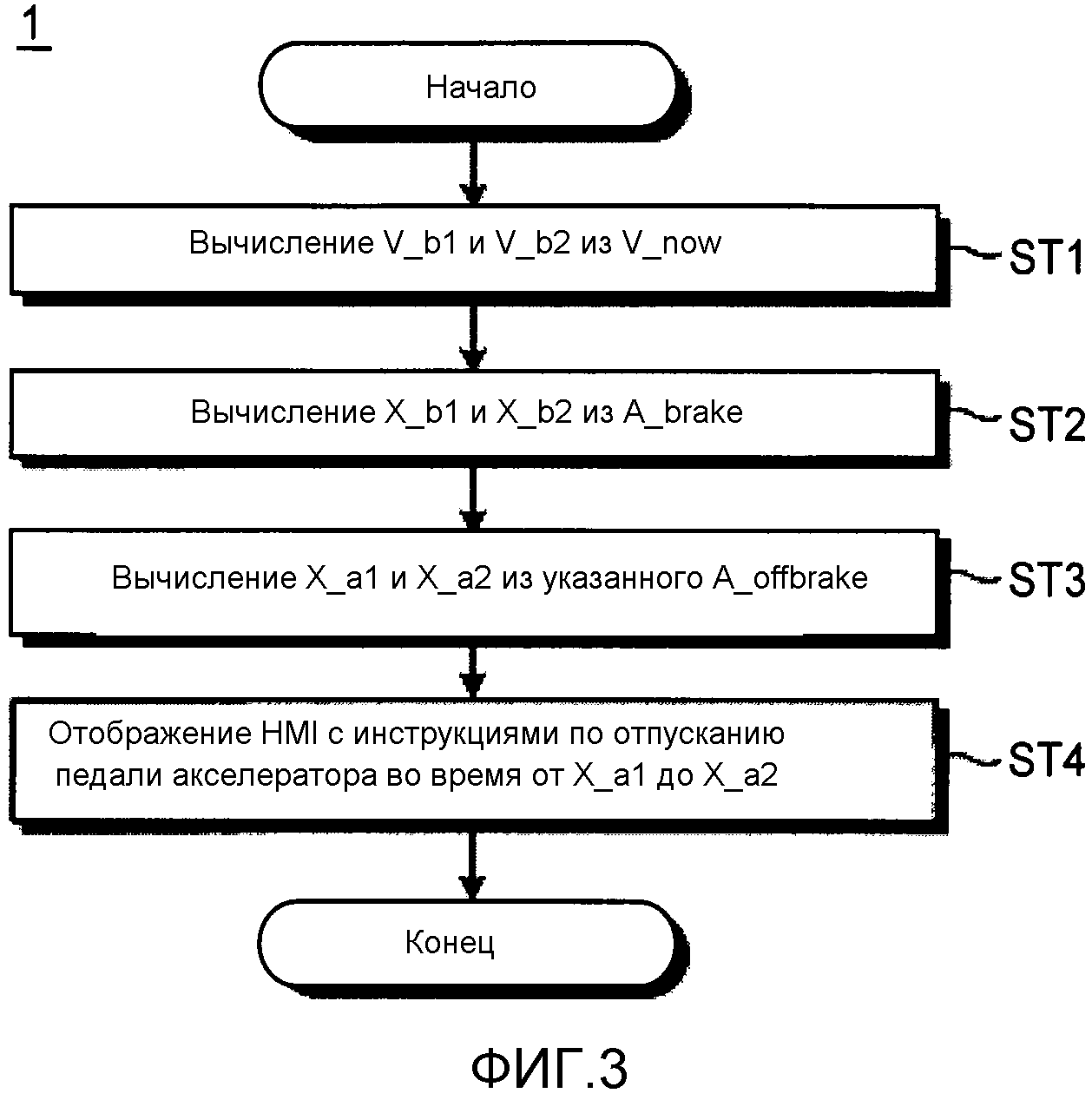
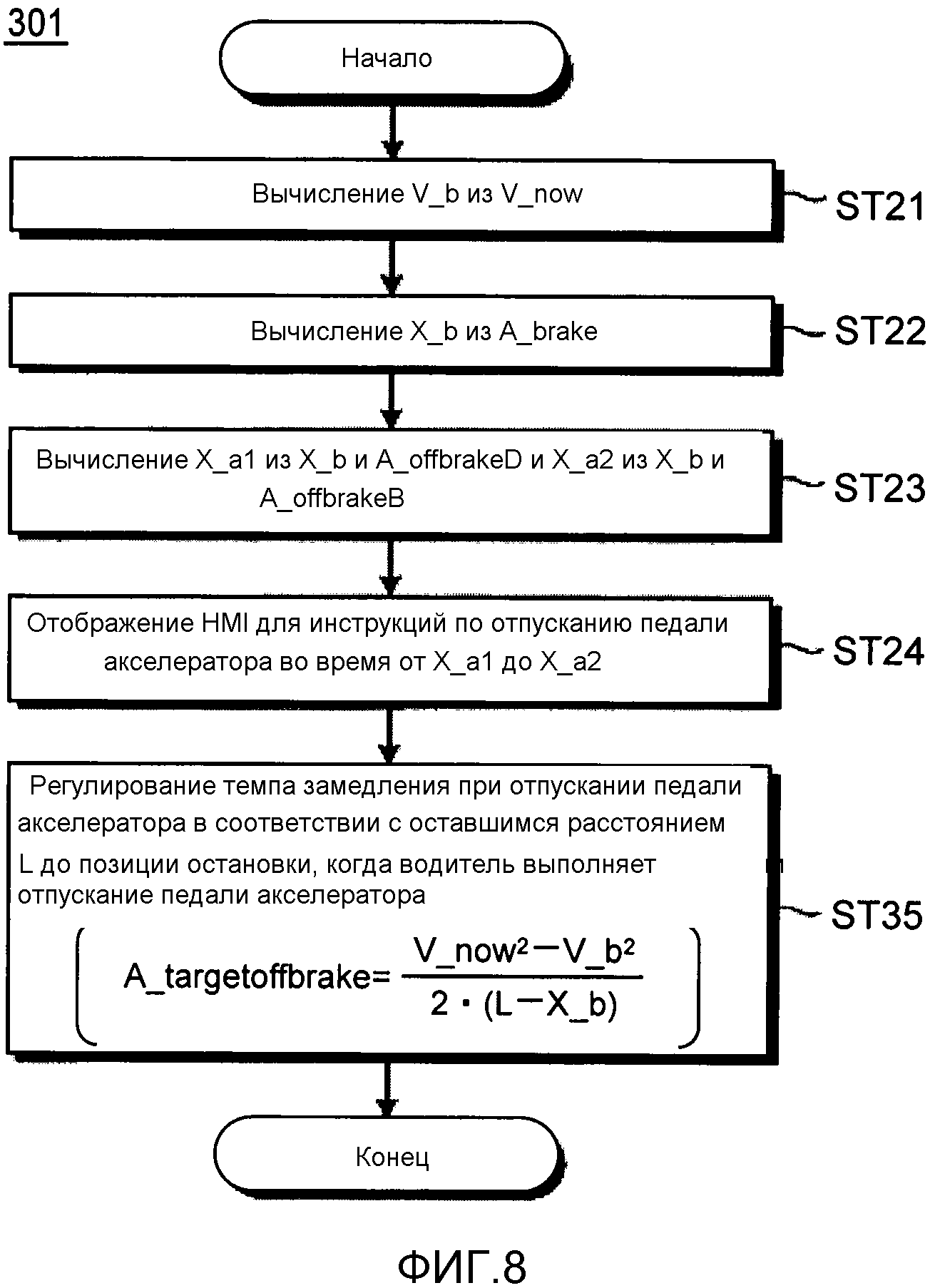
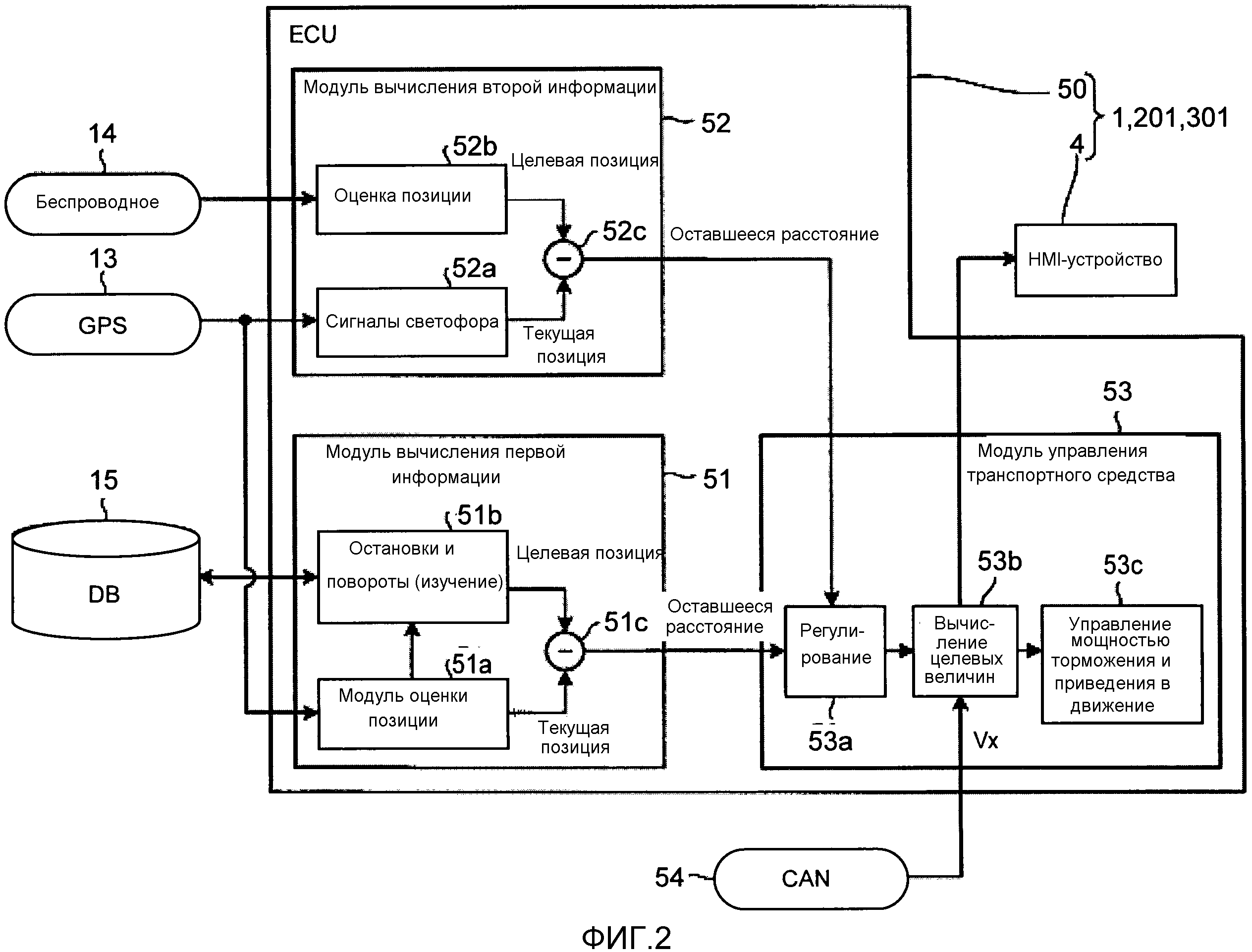
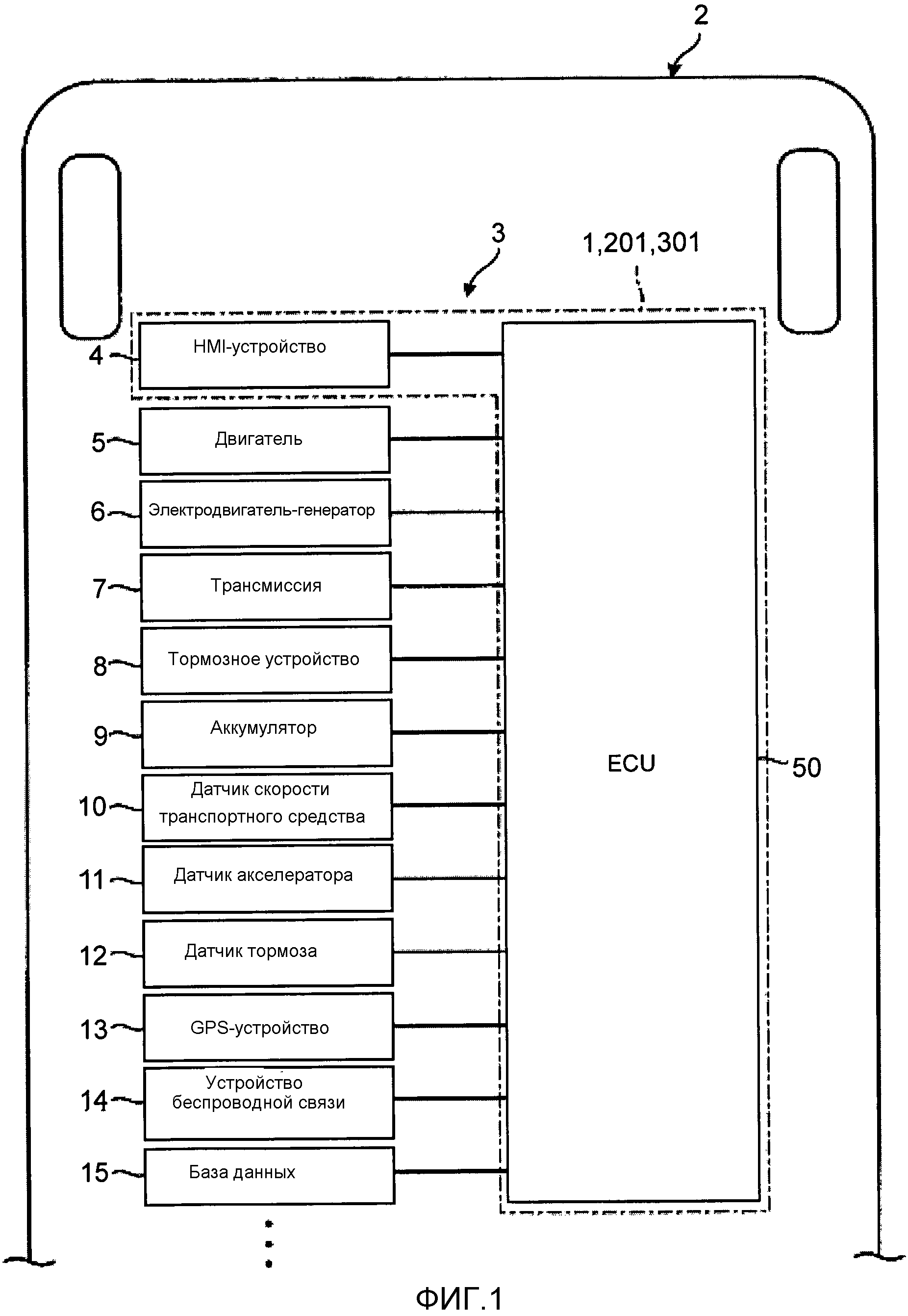
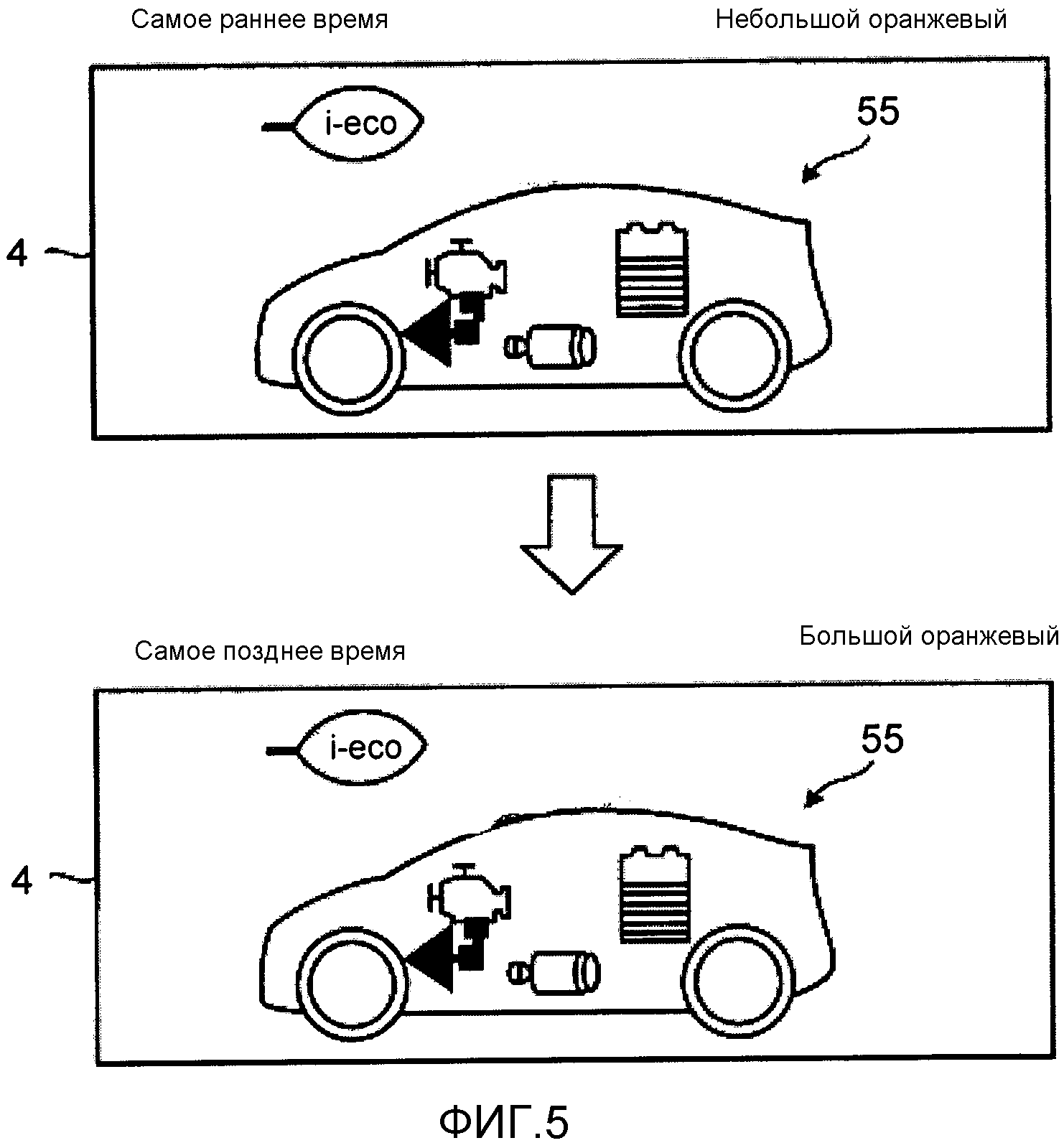
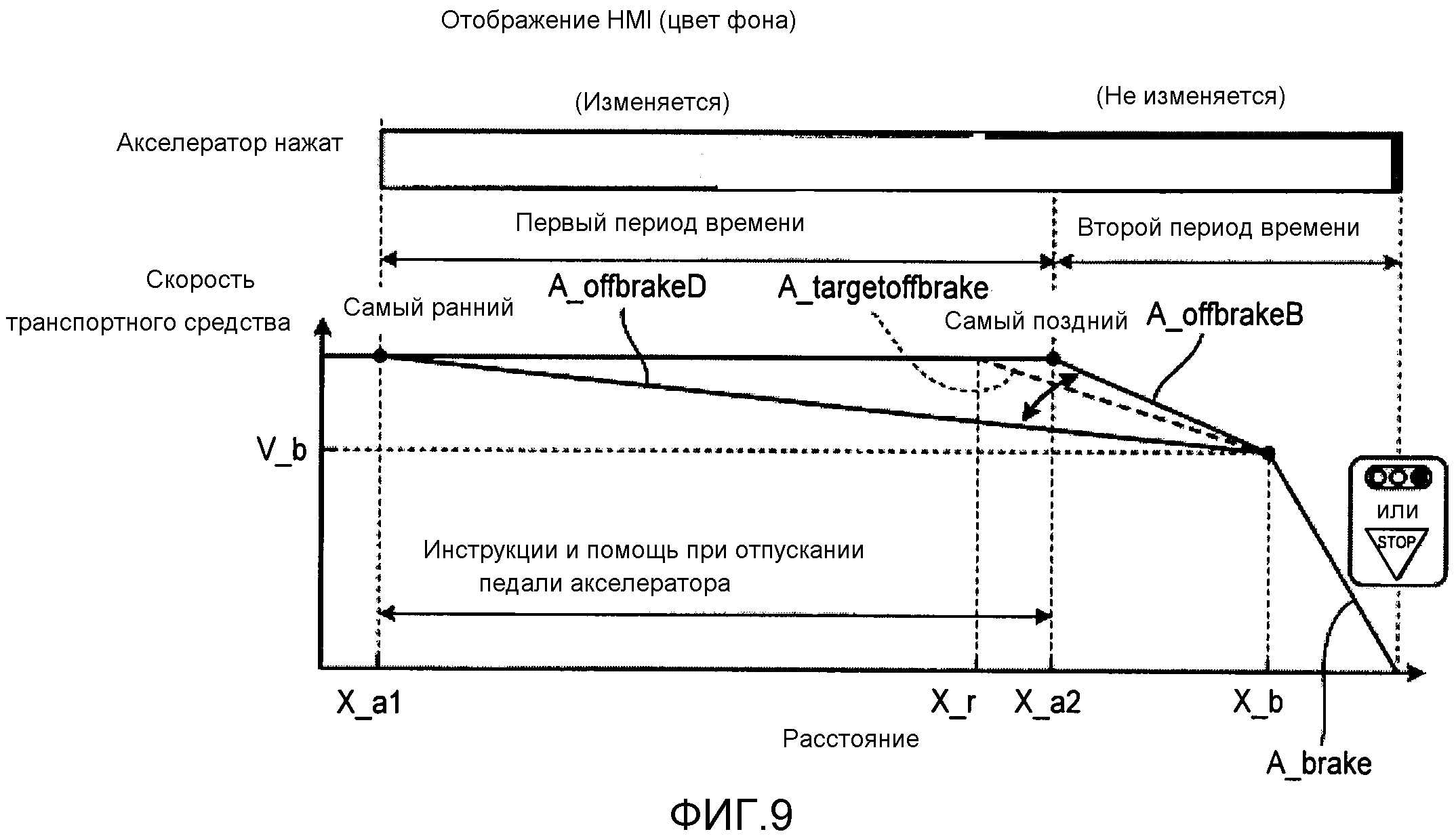
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания

