Результат интеллектуальной деятельности: ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ПЕРЕМЕННОЙ СТЕПЕНЬЮ СЖАТИЯ И СПОСОБ ОБУЧЕНИЯ ДЛЯ НЕГО
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к двигателю внутреннего сгорания, оборудованному механизмом переменной степени сжатия и, в частности, к обучению опорному положению управляющего вала.
Уровень техники
[0002] Патентный документ 1 раскрывает технологию, в которой производится обучение опорному положению управляющего вала в двигателе внутреннего сгорания с переменной степенью сжатия, оборудованном механизмом переменной степени сжатия, способным изменять степень сжатия двигателя в соответствии с угловым положением управляющего вала. Конкретно, обучение опорному положению выполняется на основании выходного сигнала от датчика степени сжатия в состоянии, когда подвижная часть, которая работает вместе с управляющим валом, удерживается в прилегающем контакте со стопором, предусмотренным на элементе опоры коленчатого вала, которая поддерживает с возможностью вращения коленчатый вал.
Патентный документ 2 описывает обнаружение опорного положения угла управляющего вала в двигателе внутреннего сгорания с переменной степенью сжатия, оборудованном механизмом переменной степени сжатия, способным изменять степень сжатия двигателя в соответствии с угловым положением первого управляющего вала, в то время как участок второго управляющего вала удерживается в прилегающем контакте со стопором, предусмотренным на корпусе.
Список источников
Патентная литература
[0003] Патентный документ 1: Японская предварительная патентная публикация № JP2006-226133
Патентный документ 2: Японская предварительная патентная публикация № JP2011-169152
Раскрытие изобретения
Техническая задача
[0004] Однако, в патентном документе 1, вращающиеся части, которые вращаются вместе с коленчатым валом, такие как шатунная шейка, противовесы и т.п., присутствуют вокруг элемента опоры коленчатого вала, и, таким образом, ограничения на компоновку являются строгими. Следовательно, трудно адекватно обеспечивать прочность и жесткость стопора, предусмотренного на элементе опоры коленчатого вала. По этой причине, когда подвижная часть, которая работает вместе с управляющим валом, приводится в прилегающий контакт со стопором, существует необходимость ограничения крутящего момента посредством снижения скорости подвижной части. Это ведет к проблеме увеличения продолжительности времени, требуемого для обучения опорному положению.
Также, в патентном документе 2, корпус, на котором предусмотрен стопор, расположен снаружи блока цилиндров, и таким образом множество соединительных частей вмешиваются между стопором и поршнем. Это ведет к проблеме точности опорного положения, такой как сниженная точность обучения опорному положению.
Кроме того, при обучении опорному положению управляющего вала, в дополнение к операции обучения в положении максимального поворота в одном направлении вращения управляющего вала, необходимо выполнять операцию обучения в положении максимального поворота в обратном направлении вращения, противоположном первому направлению вращения управляющего вала.
[0005] Следовательно, в виду ранее описанных обстоятельств, задача настоящего изобретения состоит в сокращении продолжительности времени, требуемого для обучения опорному положению, без снижения точности обучения опорному положению.
Решение задачи
[0006] Двигатель внутреннего сгорания с переменной степенью сжатия имеет механизм переменной степени сжатия, способный изменять степень сжатия двигателя в соответствии с угловым положением управляющего вала, приводной мотор для изменения и удержания углового положения управляющего вала, первый стопор, предусмотренный снаружи корпуса двигателя, для механического ограничения положения максимального поворота управляющего вала в первом направлении вращения посредством приведения первой подвижной части, которая работает вместе с управляющим валом, в прилегающий контакт с первым стопором, и второй стопор, предусмотренный внутри корпуса двигателя, для механического ограничения положения максимального поворота управляющего вала во втором направлении вращения, противоположном первому направлению вращения, посредством приведения второй подвижной части, которая работает вместе с управляющим валом, в прилегающий контакт со вторым стопором. Обучение опорному положению управляющего вала выполняется в состоянии, когда положение максимального поворота управляющего вала в первом направлении вращения механически ограничено посредством первого стопора. Затем выполняется обучение максимальному диапазону угла поворота управляющего вала в состоянии, когда положение максимального поворота управляющего вала во втором направлении вращения механически ограничено посредством второго стопора.
[0007] Вследствие наличия первого стопора снаружи корпуса двигателя существует меньшее ограничение на компоновку в сравнении с таким случаем, когда первый стопор предусмотрен внутри корпуса двигателя. Следовательно, легко обеспечивать достаточную прочность и жесткость. Следовательно, представляется возможным обеспечение прочного и надежного первого стопора. Соответственно, не обязательно снижать скорость первой подвижной части для ограничения крутящего момента, когда первая подвижная часть управляющего вала приводится в прилегающий контакт с первым стопором. В результате этого, представляется возможным сокращение продолжительности времени, требуемого для обучения опорному положению, без снижения точности обучения опорному положению. Кроме того, обучение максимальному диапазону угла поворота управляющего вала выполняется в состоянии, когда положение максимального поворота управляющего вала во втором направлении вращения механически ограничено посредством второго стопора, предусмотренного на стороне второго направления вращения, противоположного первому направлению вращения. Следовательно, представляется возможным более определенное устранение индивидуальных различий произведенных датчиков управляющего вала и, следовательно, повышение точности обнаружения степени сжатия двигателя. Кроме того, наличие второго стопора внутри корпуса двигателя способствует меньшему числу соединительных частей, вмешивающихся между вторым стопором и поршнем, в сравнении с таким случаем, когда второй стопор предусмотрен снаружи корпуса двигателя. Таким образом, представляется возможным повышение точности обучения опорному положению.
Преимущества изобретения
[0008] Согласно настоящему изобретению, представляется возможным сокращение продолжительности времени, требуемого для обучения опорному положению, без снижения точности обучения опорному положению.
Краткое описание чертежей
[0009] [Фиг. 1]
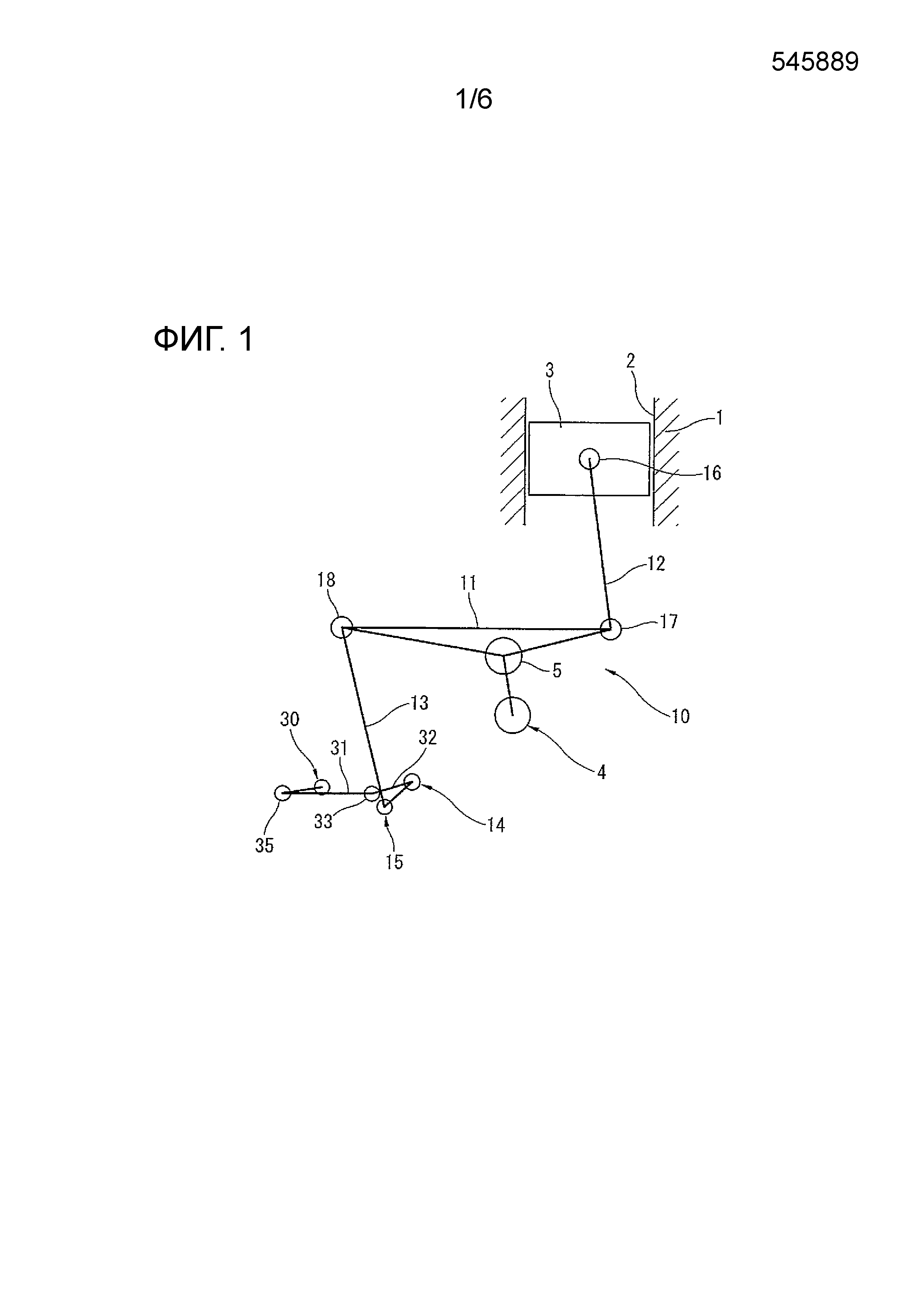
Фиг. 1 - это схема, схематично иллюстрирующая конфигурацию механизма переменной степени сжатия в одном варианте осуществления, в котором применяется изобретение.
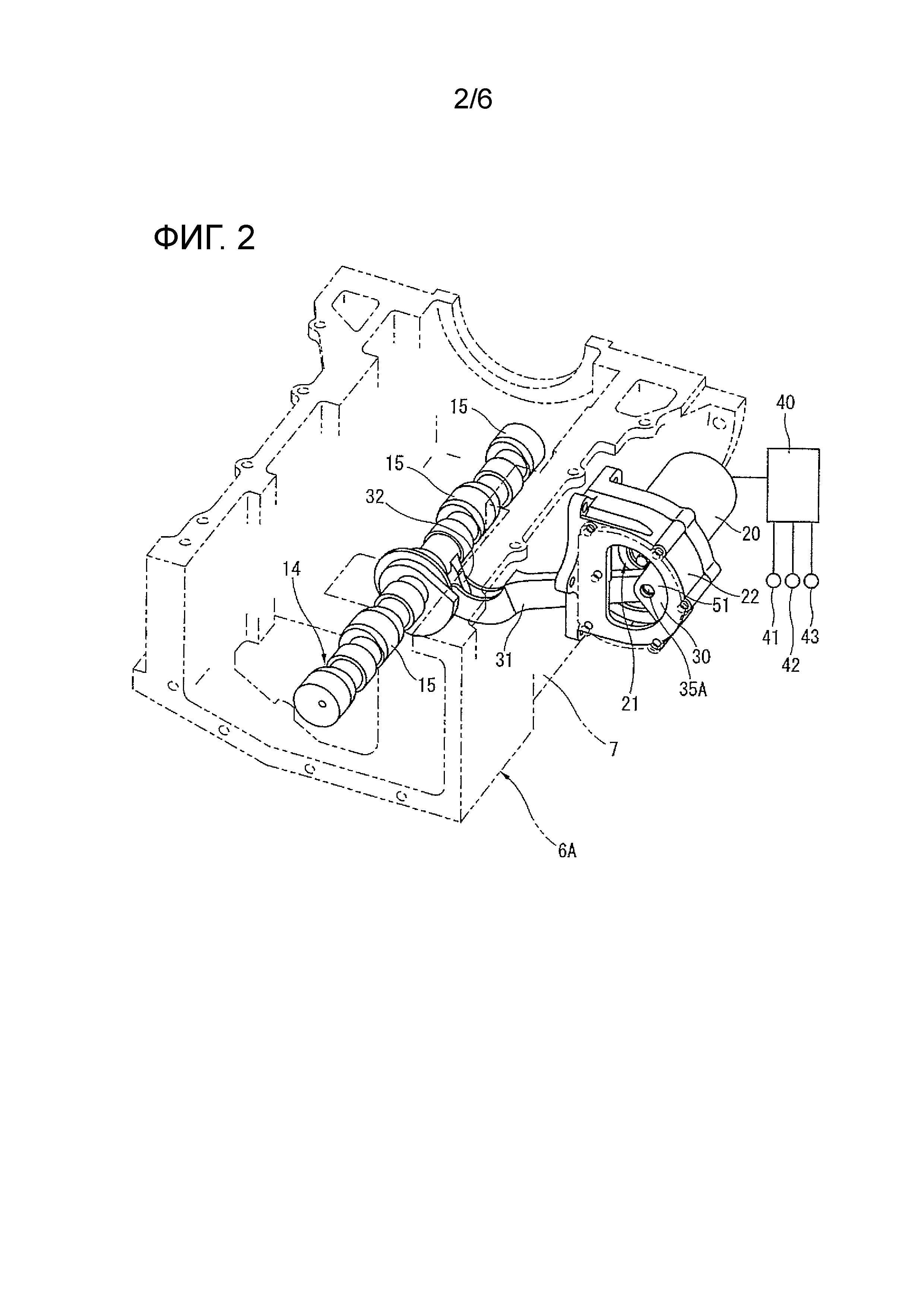
[Фиг. 2]
Фиг. 2 - это вид в перспективе, иллюстрирующий часть двигателя внутреннего сгорания с переменной степенью сжатия, оборудованного механизмом переменной степени сжатия.
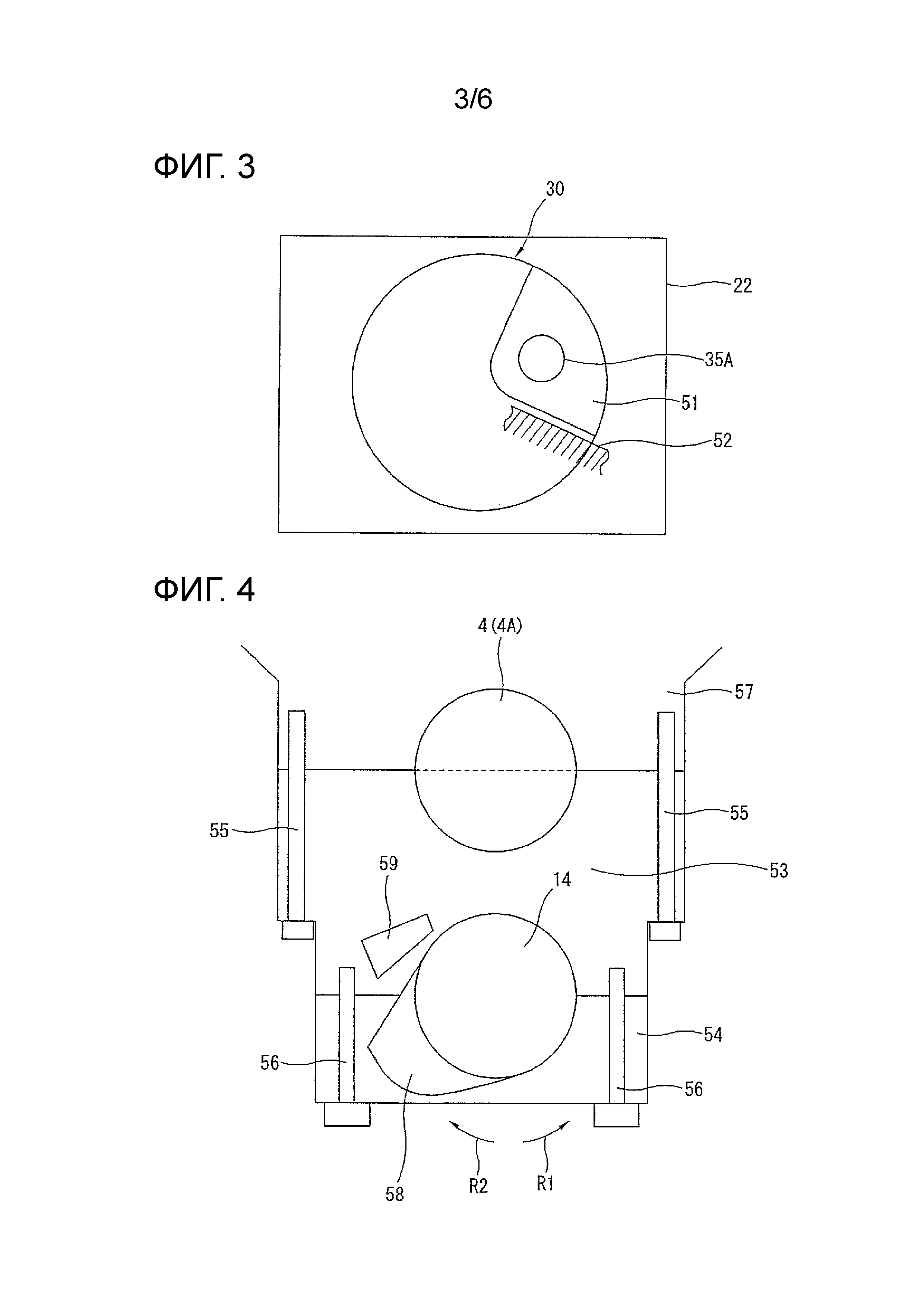
[Фиг. 3]
Фиг. 3 - это пояснительный вид, схематично иллюстрирующий первую подвижную часть и первый стопор, предусмотренный на корпусе.
[Фиг. 4]
Фиг. 4 - это пояснительный вид, схематично иллюстрирующий вторую подвижную часть и второй стопор, предусмотренный на элементе опоры коленчатого вала.
[Фиг. 5]
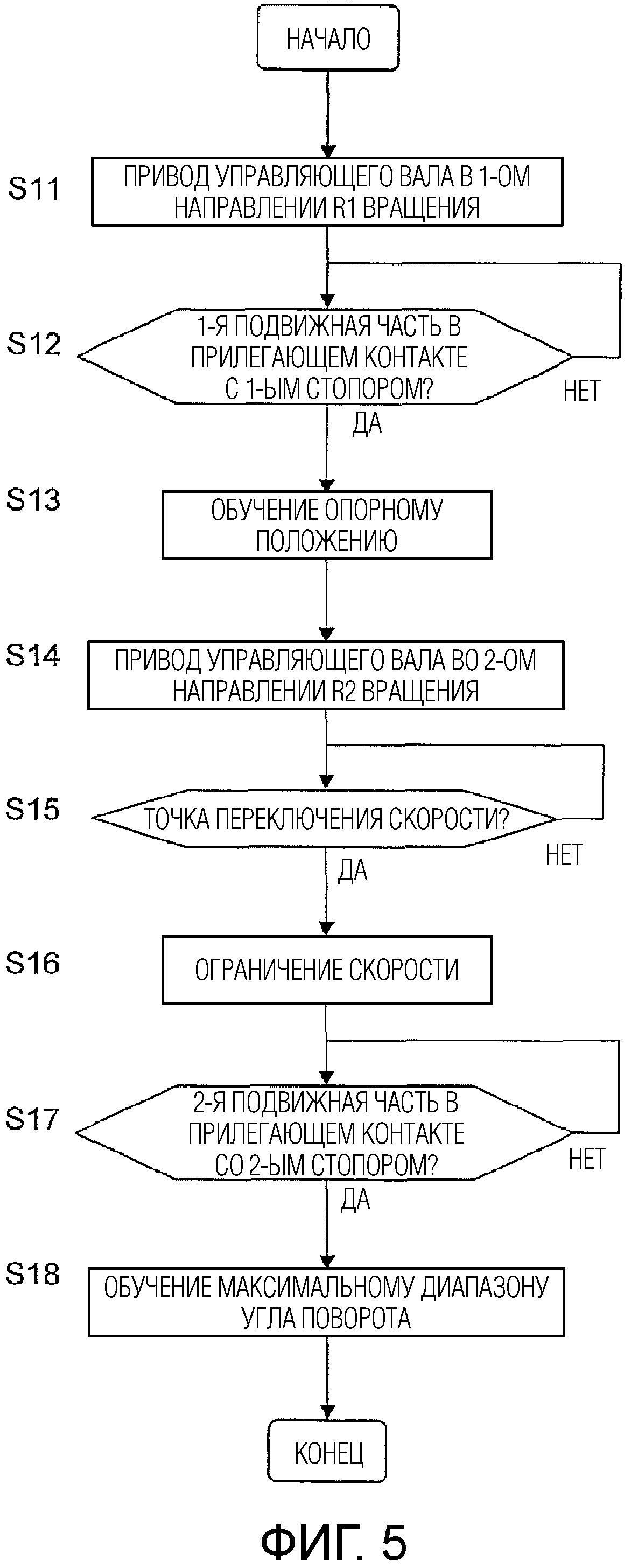
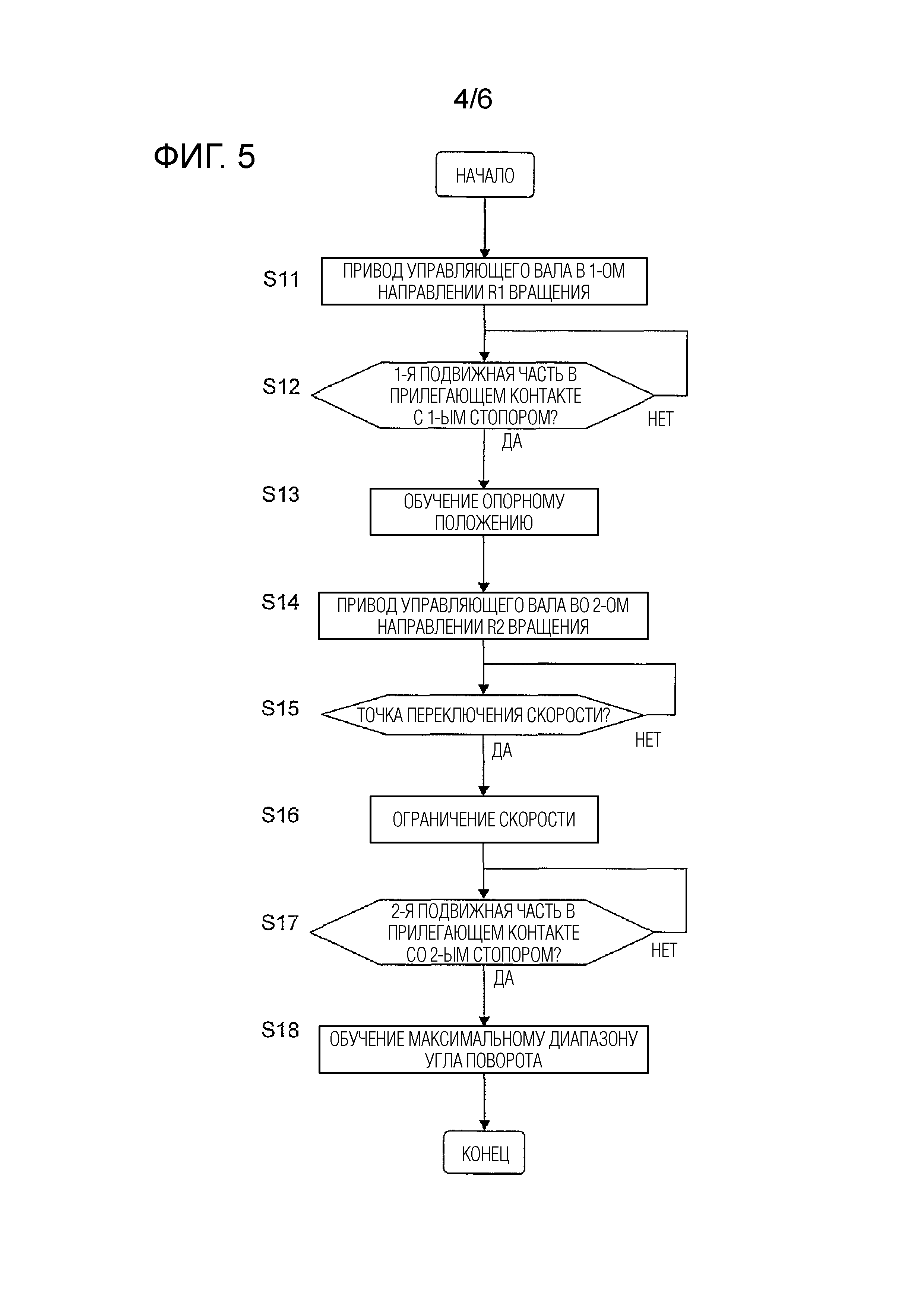
Фиг. 5 - это блок-схема, иллюстрирующая последовательность операций управления с обучением согласно варианту осуществления.
[Фиг. 6]
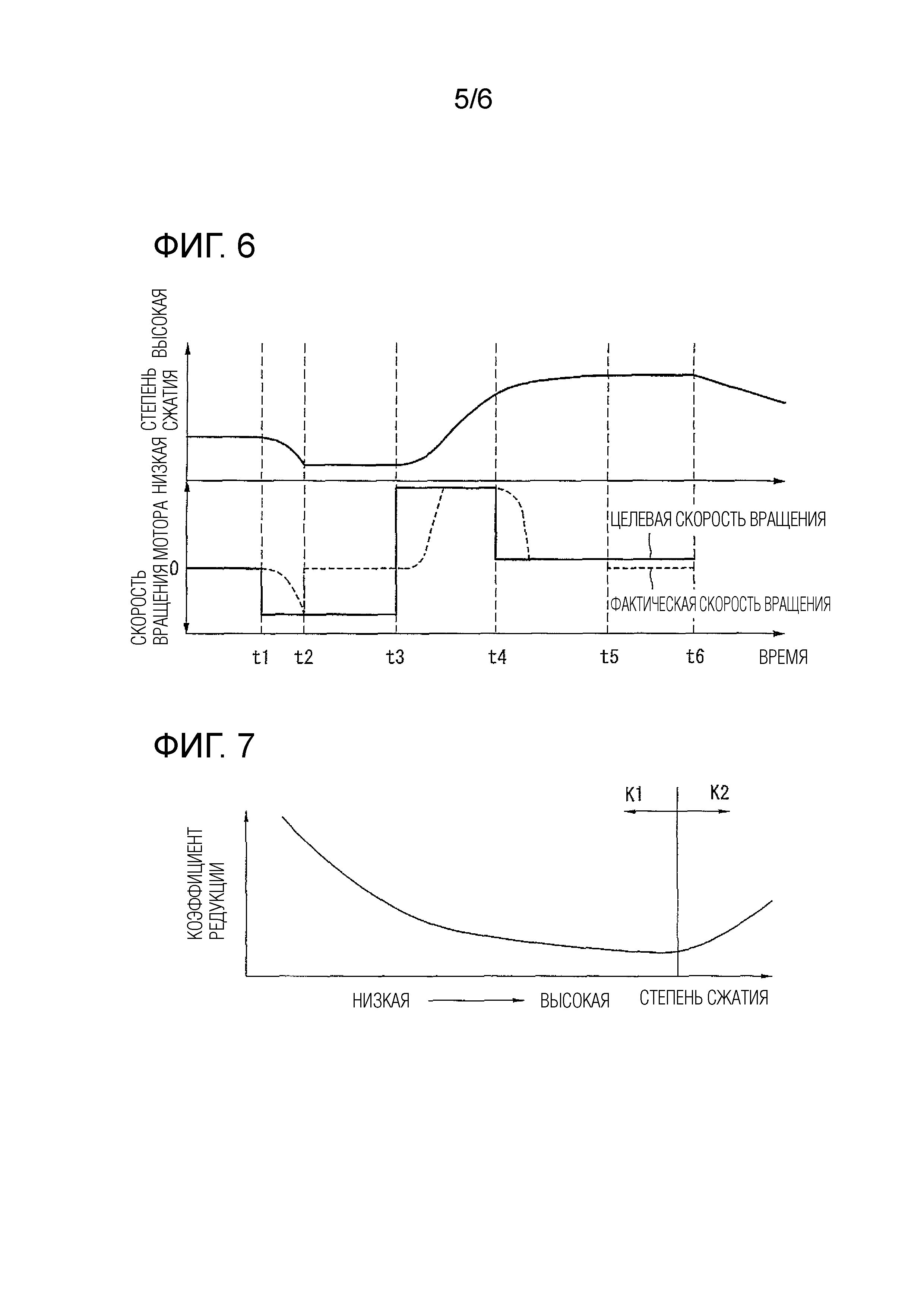
Фиг. 6 - это временная диаграмма, иллюстрирующая работу во время управления с обучением в варианте осуществления.
[Фиг. 7]
Фиг. 7 - это пояснительный вид, иллюстрирующий соотношение между степенью сжатия двигателя и коэффициентом редукции передаточного механизма.
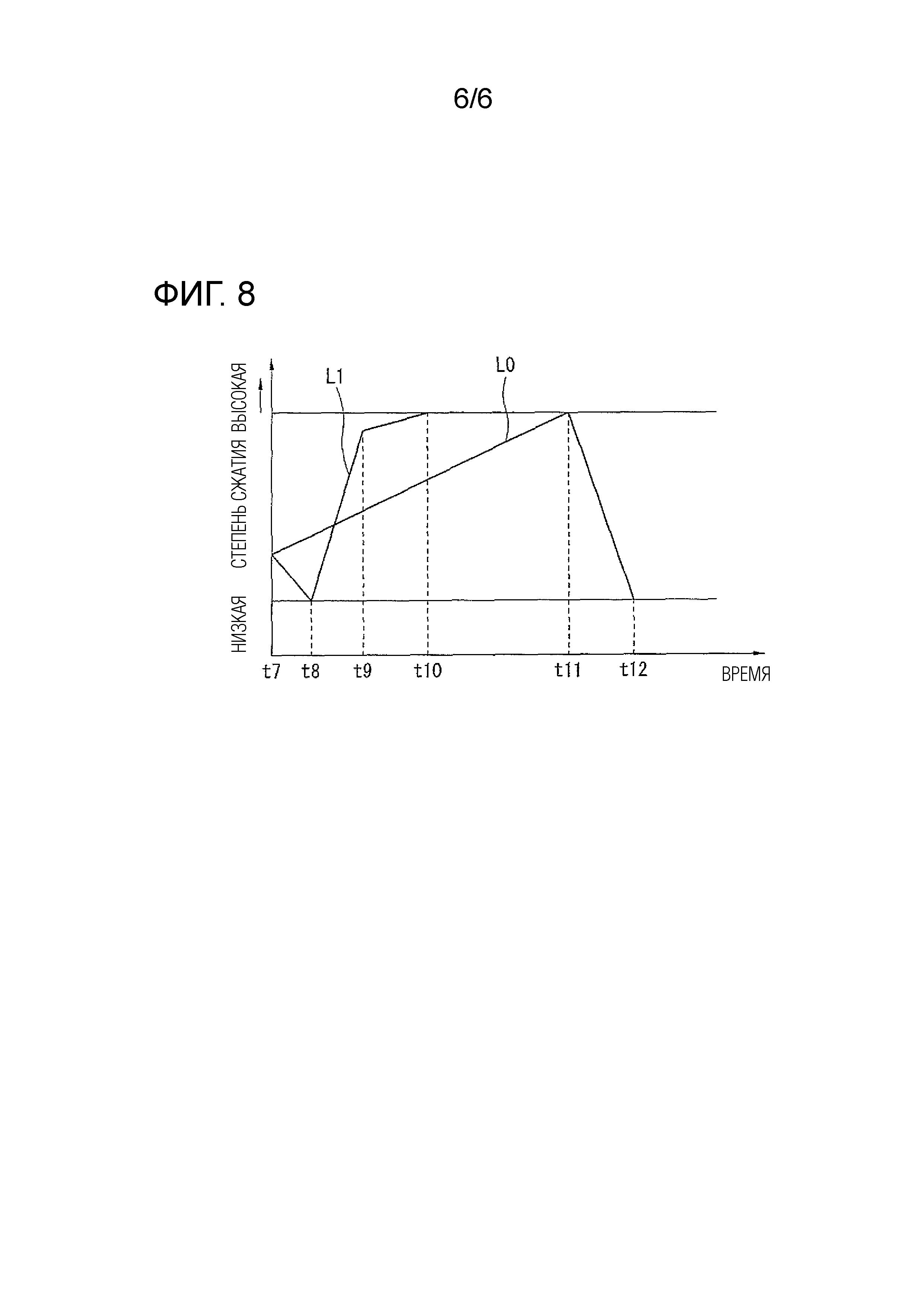
[Фиг. 8]
Фиг. 8 - это временная диаграмма, иллюстрирующая различие во времени обучения между вариантом осуществления и сравнительным примером.
Осуществление изобретения
[0010] Далее в данном документе подробно со ссылкой на чертежи объясняются предпочтительные варианты осуществления настоящего изобретения. Прежде всего, механизм переменной степени сжатия одного варианта осуществления согласно изобретению, который использует многозвенный поршневой кривошипно-шатунный механизм, далее в данном документе объясняется со ссылкой на фиг. 1 и 2. Кстати, сам этот механизм был описан в рассмотренной выше японской предварительной патентной публикации № JP2006-226133 и хорошо известен, и, таким образом, ограничимся кратким описанием
[0011] Поршень 3, который предусмотрен для каждого отдельного цилиндра, вставлен с возможностью скольжения в цилиндр 2 блока 1 цилиндров, который образует часть корпуса двигателя для двигателя внутреннего сгорания. Также, коленчатый вал 4 поддерживается с возможностью вращения посредством блока цилиндров. Механизм 10 переменной степени сжатия имеет нижнее звено 11, верхнее звено 12, управляющий вал 14, эксцентриковый участок 15 управляющего вала и управляющее звено 13. Нижнее звено 11 установлено с возможностью вращения на шатунной шейке 5 коленчатого вала 4. Верхнее звено 12 механически связывает нижнее звено 11 с поршнем 3. Управляющий вал 14 поддерживается с возможностью вращения на стороне корпуса двигателя, такой как блок 1 цилиндров. Управляющее звено 13 механически связывает эксцентриковый участок 15 управляющего вала с нижним звеном 11. Поршень 3 и верхний конец верхнего звена 12 соединены с возможностью вращения вместе посредством поршневого пальца 16 с обеспечением возможности относительного вращения между ними. Нижний конец верхнего звена 12 и нижнее звено 11 соединены с возможностью вращения вместе посредством первого соединительного штифта 17 с обеспечением возможности относительного вращения между ними. Верхний конец управляющего звена 13 и нижнее звено 11 соединены с возможностью вращения вместе посредством второго соединительного штифта 18, с обеспечением возможности относительного вращения между ними. Нижний конец управляющего звена 13 установлен с возможностью вращения на эксцентриковым участке 15 управляющего вала.
[0012] Приводной мотор 20 (см. фиг. 2) соединён с управляющим валом 14 через соединительный механизм 21. Изменение угловой ориентации нижнего звена 11 происходит посредством изменения и удержания углового положения управляющего вала 14 посредством приводного мотора 20. Благодаря изменению угловой ориентации нижнего звена, характеристика хода поршня, включающая в себя положение верхней мертвой точки (TDC) поршня и положение нижней мертвой точки (BDC) поршня, изменяется, и, таким образом, изменяется степень сжатия двигателя. Следовательно, может осуществляться управление степенью сжатия двигателя может в соответствии с условием работы двигателя посредством управления возможностью привода приводного мотора 20 посредством блока 40 управления.
[0013] Блок 40 управления соединён с различными датчиками, такими как датчик 41 управляющего вала, датчик 42 температуры масла, датчик 43 температуры всасываемого воздуха и т.п. Датчик 41 управляющего вала предусмотрен для обнаружения углового положения управляющего вала 14, соответствующего степени сжатия двигателя. Датчик 42 температуры масла предусмотрен для обнаружения температуры масла двигателя внутреннего сгорания. Датчик 43 температуры всасываемого воздуха предусмотрен для обнаружения температуры всасываемого воздуха. Блок управления выполнен с возможностью выполнения на основании выходных сигналов от этих датчиков различного управления двигателем, такого как управление впрыском топлива, управление моментом зажигания и т.п. Например, на основании выходного сигнала от датчика 41 управляющего вала блок управления выполняет управление с обратной связью для приводного мотора 20 таким образом, чтобы поддерживать степень сжатия двигателя ближе к целевой степени сжатия.
[0014] Корпус 22, в котором размещена часть соединительного механизма 21, расположен снаружи боковой стенки 7 на впускной стороне верхней части 6A поддона картера, прикрепленной к нижней секции блока 1 цилиндров и образующей часть корпуса двигателя. Оба из корпуса 22 и приводной мотор 20, который установлен на корпус, размещены в продольном направлении двигателя. Т.е. приводной мотор 20 установлен на блоке 1 цилиндров, служащем в качестве части корпуса двигателя, через корпус 22.
[0015] Как показано на фиг. 1, 2, управляющий вал 14, который размещён внутри корпуса двигателя, и вспомогательный вал 30 соединительного механизма 21, который размещён внутри корпуса 22, связываются вместе через рычаг 31. К слову, в показанном варианте осуществления, вспомогательный вал 30 выполнен как одно целое с выходным валом и редуктором скорости (не показан). Вместо этого, вспомогательный вал 30 может быть выполнен отдельно от выходного вала редуктора скорости, так что вспомогательный вал и выходной вал редуктора скорости вращаются вместе как одно целое.
[0016] Один конец рычага 31 и верхний конец рычажка 32, проходящего радиально наружу от осевого центрального участка управляющего вала 14, связаны между собой посредством третьего соединительного штифта 33 с обеспечением возможности относительного вращения между ними. Другой конец рычага 31 и вспомогательный вал 30 связаны друг с другом через четвертый соединительный штифт 35 с обеспечением возможности относительного вращения между ними. К слову, на фиг. 2, четвертый соединительный штифт 35 не показан и пропущен, но вместо этого показано соединительное отверстие 35A под штифт для вспомогательного вала 30, в которое вставлен четвертый соединительный штифт 35. Щелевидное передаточное отверстие, через которое вставлен рычаг 31, выполнено сквозь боковую стенку 7 на впускной стороне верхней части 6A поддона картера.
[0017] Соединительный механизм 21 снабжён редуктором скорости для уменьшения выходной мощности (крутящего момента), выводимой от приводного двигателя 20, и для передачи мощности пониженной скорости стороне управляющего вала 14. В качестве предпочтительного редуктора скорости используется особый редуктор скорости, способный обеспечивать высокие коэффициенты редукции, такой как устройство зубчатой передачи с волнообразным движением или редуктор скорости с циклоидальным планетарным механизмом. Кроме того, передаточный механизм выполнен таким образом, что коэффициент редукции, который обеспечивается посредством соединительной структуры, включающей в себя рычаг 31, рычажок 32 и т.п., изменяется в соответствии с угловым положением управляющего вала 14. Т.е. степень сжатия двигателя уменьшается посредством поворота управляющего вала 14, и, таким образом изменяется угловая ориентация соединительной структуры, включающей в себя рычажок 32 и рычаг 31. Благодаря изменению угловой ориентации также изменяется коэффициент редукции пути передачи крутящего момента от приводного мотора 20 управляющему валу 14. Конкретно, как показано в общем на фиг. 7 путь передачи крутящего момента от приводного мотора 20 управляющему валу 14 выполнен таким образом, что коэффициент редукции пути передачи крутящего момента увеличивается, когда управляющий вал 14 вращается в направлении низкой степени сжатия. Кроме того, рядом с максимальной степенью сжатия, путь передачи крутящего момента выполнен таким образом, что коэффициент редукции увеличивается, когда управляющий вал 14 вращается в направлении высокой степени сжатия.
[0018] Как показано на фиг. 3, проходящая в осевом направлении веерообразная первая подвижная часть 51 выполнена как одно целое с вспомогательным валом 30, который работает вместе с управляющим валом 14. Первый стопор 52 предусмотрен на корпусе 22, в котором размещена часть соединительного механизма 21. Первый стопор предусмотрен для механического ограничения положения максимального поворота управляющего вала 14 в первом направлении R1 вращения (см. фиг. 4), соответствующем направлению низкой степени сжатия, посредством приведения первой подвижной части 51 в прилегающий контакт с первым стопором 52.
[0019] Кроме того, как показано на фиг. 4, крышка 53 подшипника, служащая в качестве элемента опоры коленчатого вала, и вспомогательная крышка 54 закреплены вместе на перегородке 57 блока 1 цилиндров, служащего в качестве части корпуса двигателя, с помощью множества болтов 55, 56. Коренная шейка 4A коленчатого вала 4 поддерживается с возможностью вращения между крышкой 53 подшипника и перегородкой 57. Шейка управляющего вала 14 поддерживается с возможностью вращения между крышкой 53 подшипника и вспомогательной крышкой 54. Вторая подвижная часть 58 предусмотрена на управляющем валу 14 таким образом, что она проходит радиально наружу от управляющего вала. Вторая подвижная часть 58 работает как одно целое вместе с управляющим валом 14. Второй стопор 59 предусмотрен как одно целое на одной боковой поверхности крышки 53 подшипника и выполнен с возможностью проходить в осевом направлении управляющего вала 14, так что второй стопор способен примыкать ко второй подвижной части 58. Второй стопор предусмотрен для механического ограничения положения максимального поворота управляющего вала 14 во втором направлении R2 вращения, соответствующем направлению высокой степени сжатия, посредством приведения второй подвижной части 58 в прилегающий контакт со вторым стопором 59.
[0020] Далее управление с обучением опорному положению управляющего вала варианта осуществления подробно объяснено со ссылкой на фиг. 5 и 6. Управление с обучением опорному положению выполняется однократно на заводе по сборке двигателя внутреннего сгорания, после того как двигатель внутреннего сгорания был собран. Однако при необходимости такое управление с обучением опорному положению может выполняться во время работы двигателя.
[0021] Прежде всего, на этапе S11, управляющий вал 14 приводится во вращение в первом направлении R1 вращения, соответствующем направлению низкой степени сжатия, посредством приводного мотора 20. Период времени t1-t2 со времени t1 до времени t2 на фиг. 6 представляет состояние, когда управляющий вал 14 вращается и сдвигается к направлению низкой степени сжатия. В это время скорость вращения управляющего вала 14 не ограничена, и, следовательно, управляющий вал 14 приводится во вращение посредством приводного мотора 20 без какого-либо ограничения крутящего момента, так что управляющий вал 14 вращается с максимальной скоростью.
[0022] На этапе S12 выполняется проверка для определения, была ли первая подвижная часть 51 приведена в прилегающий контакт с первым стопором 52, и, таким образом, управляющий вал 14 удерживается в положении максимального поворота в первом направлении R1 вращения. Например, проверка может быть выполнена просто на основании информации о том, прошел ли заданный период времени с начала привода управляющего вала 14 в первом направлении R1 вращения. Вместо этого проверка может быть выполнена на основании сигнала обнаружения датчика 41 управляющего вала.
[0023] Когда видно, что первая подвижная часть 51 была приведена в прилегающий контакт с первым стопором 52, и, таким образом, управляющий вал 14 удерживается в положении максимального поворота в первом направлении R1 вращения, процедура переходит от этапа S12 к этапу S13. На этом этапе управление с обучением опорному положению выполняется на основании сигнала обнаружения датчика 41 управляющего вала (см. период времени t2-t3 на фиг. 6). Таким образом, в конкретном положении, в котором угловое положение управляющего вала 14 механически ограничено первым стопором 52, сигнал обнаружения датчика 41 управляющего вала обучается и корректируется. Следовательно, представляется возможным устранение индивидуального различия (различия рабочей характеристики) датчика 41 управляющего вала, тем самым повышая точность обнаружения степени сжатия двигателя.
[0024] Непосредственно после завершения управления с обучением опорному положению процедура переходит к этапу S14. На этом этапе управляющий вал 14 приводится во вращение во втором направлении R2 вращения, соответствующем направлению высокой степени сжатия, которое противоположно первому направлению R1 вращения. К слову, во время первой половины (см. период времени t3-t4 на фиг. 6) периода перехода к высокой степени сжатия, скорость вращения (целевая скорость вращения) управляющего вала 14 не ограничена, и, следовательно, управляющий вал 14 приводится во вращение посредством приводного мотора 20 без какого-либо ограничения крутящего момента, так что управляющий вал 14 вращается с максимальной скоростью.
[0025] На этапе S15 выполняется проверка для определения, была ли достигнута точка переключения скорости (см. время t4 на фиг. 6), соответствующая второй половине периода перехода к высокой степени сжатия. Например, проверка может быть выполнена просто на основании информации о том, прошел ли заданный период времени с начала периода перехода к высокой степени сжатия. Вместо этого проверка может быть выполнена на основании сигнала обнаружения датчика 41 управляющего вала.
[0026] Непосредственно после того как точка переключения скорости была достигнута, т.е. непосредственно после перехода ко второй половине (см. период времени t4-t5 на фиг. 6) периода перехода к высокой степени сжатия, процедура переходит от этапа S15 к этапу S16. На этом этапе крутящий момент привода (целевая скорость вращения) приводного мотора 20 ограничен с целью ограничения или сдерживания скорости вращения управляющего вала 14. Таким образом, в состоянии, когда скорость вращения управляющего вала 14 была ограничена, управляющий вал 14 вращается во втором направлении R2 вращения, соответствующем стороне высокой степени сжатия.
[0027] На этапе S17 выполняется проверка для определения, была ли вторая подвижная часть 58 приведена в прилегающий контакт со вторым стопором 59, и, таким образом, управляющий вал 14 удерживается в положении максимального поворота во втором направлении R2 вращения. Когда определено, что вторая подвижная часть 58 была приведена в прилегающий контакт со вторым стопором 59, и, таким образом, управляющий вал 14 удерживается в положении максимального поворота во втором направлении R2 вращения, процедура переходит от этапа S17 к этапу S18. На этом этапе, в особом состоянии, когда положение максимального поворота управляющего вала 14 во втором направлении R2 вращения механически ограничено вторым стопором 59, управление обучением максимальному диапазону угла поворота управляющего вала 14 выполняется на основании сигнала обнаружения датчика 41 управляющего вала (см. период времени t5-t6 на фиг. 6). Таким образом, в конкретном положении, в котором угловое положение управляющего вала 14 механически ограничено вторым стопором 59, сигнал обнаружения датчика 41 управляющего вала обучается и корректируется. Следовательно, представляется возможным более определенное устранение индивидуального различия (различия рабочей характеристики) датчика 41 управляющего вала, тем самым повышая точность обнаружения степени сжатия двигателя.
[0028] Указанная конфигурация варианта осуществления и ее работа и результаты перечисляются ниже в данном документе.
[1] В конфигурации, в которой выполняется обучение опорному положению управляющего вала 14 в состоянии, когда положение максимального поворота управляющего вала 14 в первом направлении R1 вращения механически ограничено посредством первого стопора 52, первый стопор 52 предусмотрен на корпусе 22. Таким образом, первый стопор 52 предусмотрен на корпусе 22, расположенном снаружи корпуса двигателя, и, таким образом, существует меньшее ограничение на компоновку в сравнении с таким случаем, когда первый стопор 52 предусмотрен на крышке 53 подшипника (элементе опоры коленчатого вала), расположенной в блоке 1 цилиндров, образующем часть корпуса двигателя. Следовательно, легко обеспечивать его достаточную прочность и жесткость. Следовательно, представляется возможным обеспечение прочного и надежного первого стопора 52. Соответственно, не обязательно снижать скорость первой подвижной части для ограничения крутящего момента, когда первая подвижная часть 51 приводится в прилегающий контакт с первым стопором 52. В результате этого, представляется возможным сокращать продолжительность времени, требуемого для обучения опорному положению, без снижения точности обучения опорному положению.
[0029] Кроме того, двигатель внутреннего сгорания с переменной степенью сжатия имеет второй стопор 59 для механического ограничения положения максимального поворота управляющего вала 14 во втором направлении R2 вращения, противоположном первому направлению R1 вращения, посредством приведения второй подвижной части 58, которая работает вместе с управляющим валом 14, в прилегающий контакт со вторым стопором. Двигатель внутреннего сгорания с переменной степенью сжатия выполнен таким образом, что обучение максимальному диапазону угла поворота управляющего вала 14 выполняется в состоянии, когда положение максимального поворота управляющего вала 14 во втором направлении R2 вращения механически ограничено посредством второго стопора 59. Посредством обучения и корректировки максимального диапазона угла поворота управляющего вала 14, как описано выше, представляется возможным более определенное устранение индивидуального различия (различия рабочей характеристики) датчика 41 управляющего вала и, следовательно, повышение точности обнаружения степени сжатия двигателя. Вследствие этого, второй стопор 59 предусмотрен на крышке 53 подшипника, расположенной внутри корпуса двигателя. Наличие второго стопора внутри корпуса двигателя способствует меньшему числу соединительных частей, вмешивающихся между вторым стопором 59 и поршнем 3, в сравнении с таким случаем, когда второй стопор 59 предусмотрен снаружи корпуса двигателя. Таким образом, представляется возможным повышение точности обучения опорному положению. Обращаясь к фиг. 8, показана временная диаграмма, иллюстрирующая различие времени обучения между вариантом осуществления, выраженным характеристикой L1, и сравнительным примером, выраженным характеристикой L0. Ради ясности, продолжительность времени, в течение которого фактически выполняется обучение, пропущена. Как показано на фиг. 8, во время t7, соответствующее точке начала управления с обучением, угловое положение управляющего вала 14 является неидентифицированным. Как видно в сравнительном примере, выраженном характеристикой L0, предположим, что, прежде всего, управляющий вал 14 вращается во втором направлении R2 вращения (т.е. направлении высокой степени сжатия), и затем управляющий вал 14 вращается в первом направлении R1 вращения (т.е. направлении низкой степени сжатия). В таком случае, для ограничения крутящего момента, когда вторая подвижная часть 58 приводится в прилегающий контакт со вторым стопором 59, предусмотренным на крышке 53 подшипника, скорость приводного двигателя 20 должна быть ограничена непосредственно после начала приведения в движение приводного мотора 20, т.е. непосредственно после времени t7. Это обусловлено тем, что вращающиеся части, которые вращаются вместе с коленчатым валом 4, такие как шатунная шейка 5, противовесы и т.п., присутствуют вокруг крышки 53 подшипника, расположенной внутри корпуса двигателя, и, таким образом, ограничения на компоновку являются строгими. Следовательно, трудно адекватно обеспечивать прочность и жесткость второго стопора 59, предусмотренного на крышке 53 подшипника. По этой причине, когда вторая подвижная часть 58 приводится в прилегающий контакт со вторым стопором 59, существует необходимость ограничения скорости. Следовательно, занимает длительное время приведение второй подвижной части 58 в прилегающий контакт со вторым стопором 59 (см. период времени t7-t11). Таким образом, время до завершения обучения становится очень длительным.
[0030] В отличие от вышесказанного, в варианте осуществления, выраженном характеристикой L1, прежде всего, обучение опорному положению управляющего вала 14 в состоянии, когда положение максимального поворота управляющего вала 14 в первом направлении R1 вращения механически ограничено посредством первого стопора 52, и затем выполняется обучение максимальному диапазону угла поворота управляющего вала 14 в состоянии, когда положение максимального поворота управляющего вала 14 во втором направлении R2 вращения механически ограничено посредством второго стопора 59. Т.е. прежде всего, управляющий вал 14 приводится во вращение в первом направлении R1 вращения, и затем управляющий вал приводится во вращение во втором направлении R2 вращения. Вслед за этим первый стопор 52, расположенный на стороне первого направления R1 вращения, предусмотрен на прочном корпусе 22, и, таким образом, не нужно ограничивать скорость приводного мотора 20. Т.е. когда управляющий вал 14 сначала приводится во вращение в первом направлении R1 вращения, не нужно ограничивать скорость приводного мотора 20. Следовательно, период времени (t7-t8) до тех пор, пока первая подвижная часть 51 не будет приведена в прилегающий контакт с первым стопором 52, может быть сокращен. После этого, когда управляющий вал 14 приводится во вращение во втором направлении R2 вращения, приведение во вращение управляющего вала 14 во втором направлении R2 вращения начинается из конкретного состояния, когда первая подвижная часть 51 удерживается в прилегающем контакте с первым стопором. Следовательно, на раннем этапе (t8-t9) приведения во вращение не нужно выполнять какое-либо ограничение скорости приводного мотора 20. В результате этого, представляется возможным значительное сокращение времени (t7-t10) до завершения обучения.
[2] Кроме того, второй стопор 59 предусмотрен на крышке 53 подшипника, служащей в качестве элемента опоры коленчатого вала. Таким образом, такое положение стопора, при котором выполняется обучение максимальному диапазону угла поворота, структурировано как крышка корпуса подшипника, расположенная рядом с управляющим валом 14. Следовательно, представляется возможным повышение точности обучения.
[0031] [3] Однако, вращающиеся части, которые вращаются вместе с коленчатым валом 4, такие как шатунная шейка 5, противовесы и т.п., присутствуют вокруг крышки 53 подшипника, расположенной внутри блока 1 цилиндров, и, таким образом, ограничения на компоновку являются строгими. Следовательно, невозможно строго предусматривать второй стопор 59 с достаточной долговечностью. По этой причине, когда вторая подвижная часть 58 приводится в прилегающий контакт со вторым стопором 59 для обучения максимальному диапазону угла поворота, рабочая скорость приводного мотора 20 ограничена с целью сдерживания крутящего момента во время прилегающего контакта (см. поздний этап (t9-t10) приведения во вращение управляющего вала 14 во втором направлении R2 вращения на фиг. 8). Таким образом, второй стопор 59 предусмотрен на крышке 53 подшипника, но представляется возможным обеспечение желаемой точности обучения.
[0032] [4] Как показано на фиг. 7, путь передачи крутящего момента от приводного мотора 20 управляющему валу 14 выполнен таким образом, что коэффициент редукции для пути передачи крутящего момента задан в порядке «большой, малый и большой», когда управляющий вал 14 вращается от стороны низкой степени сжатия к стороне высокой степени сжатия. Также вторая подвижная часть 58 выполнена с возможностью вхождения в прилегающий контакт со вторым стопором 59 в секции K2, в которой коэффициент редукции изменяется с малого на большой. Кроме того, когда вторая подвижная часть 58 приводится в прилегающий контакт со вторым стопором 59 для обучения максимальному диапазону угла поворота, рабочая скорость приводного мотора 20 ограничена в секции K2, после того как коэффициент редукции переключился с малого на большой.
[0033] Предположим, что скорость приводного мотора 20 ограничена в секции K1, в которой коэффициент редукции изменяется с большого на малый, коэффициент редукции уменьшается, когда управляющий вал 14 поворачивается во втором направлении R2 вращения (в направлении высокой степени сжатия), и, таким образом, крутящий момент, передаваемый от приводного мотора 20 управляющему валу 14, также уменьшается. В таком случае существует вероятность, что вторая подвижная часть 58 нежелательным образом останавливается в середине операции из-за трения каждой из частей.
[0034] В показанном варианте осуществления скорость приводного мотора ограничена в секции K2, после того как коэффициент редукции был переключен с малого на большой. Следовательно, коэффициент редукции увеличивается, когда управляющий вал 14 вращается во втором направлении R2 вращения (в направлении высокой степени сжатия), и, таким образом, крутящий момент, передаваемый от приводного мотора 20 управляющему валу 14, также увеличивается. Соответственно, представляется возможным удержание второй подвижной части 58 от нежелательной остановки до прилегающего контакта второй подвижной части со вторым стопором 59, даже с ограничением скорости, тем самым повышая надежность управления с обучением.
[0035] [5] Механизм переменной степени сжатия выполнен таким образом, что степень сжатия двигателя увеличивается, когда управляющий вал вращается в первом направлении R1 вращения, и что степень сжатия двигателя уменьшается, когда управляющий вал вращается во втором направлении R2 вращения. Как описано выше, второй стопор 59 на стороне направления высокой степени сжатия, который требует высокой точности для предотвращения возникновения детонации и преждевременного зажигания, предусмотрен на крышке 53 подшипника рядом с поршнем 3 и управляющим валом 14. Следовательно, представляется возможным обеспечение высокой точности обучения на стороне высокой степени сжатия, тем самым удовлетворительно предотвращая возникновение детонации и преждевременного зажигания.
[0036] При том, что выше приведено описание конкретных вариантов осуществления, реализующих изобретение, следует понимать, что изобретение не ограничено конкретными вариантами осуществления, показанными и описанными в данном документе, но могут быть выполнены различные изменения и модификации. Например, в показанном варианте осуществления первое направление R1 вращения задано как направление низкой степени сжатия, тогда как второе направление R2 вращения задано как направление высокой степени сжатия. Напротив, первое направление R1 вращения может быть задано как направление высокой степени сжатия, тогда как второе направление R2 вращения может быть задано как направление низкой степени сжатия.
Список условных обозначений
[0037] 1 Блок цилиндров
4 Коленчатый вал
10 Механизм переменной степени сжатия
14 Управляющий вал
20 Приводной мотор
21 Соединительный механизм
22 Корпус
51 Первая подвижная часть
52 Первый стопор
53 Крышка подшипника (элемент опоры коленчатого вала)
58 Вторая подвижная часть
59 Второй стопор
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство для различения ценных бумаг со средством центрирования
Двигатель внутреннего сгорания
Способ управления для двигателя внутреннего сгорания и устройство управления для двигателя внутреннего сгорания

