Результат интеллектуальной деятельности: МОДУЛЬ УПРАВЛЕНИЯ ПОЛИГОННЫМ ОБОРУДОВАНИЕМ
Вид РИД
Изобретение
Изобретение относится к средствам решения задач информационного обмена и управления и может быть использовано в комплексах дистанционно-управляемого полигонного оборудования.
Известна система управления появляющейся мишенью (см. патент RU №2431799 С1, опубл. 20.10.11 г., Бюл. №29), принятая за прототип. Изобретение относится к учебно-тренировочным средствам и может использоваться при разработке дистанционно управляемых тренажеров для стрельбы. Комплекс содержит командный пункт, включающий взаимосвязанные между собой пульт управления, устройство отображения и документирования, при этом командный пункт соединен по дуплексным каналам связи с объектом управления мишенью. Пульт управления выполнен в виде формирователя команд управления, формирователя запросов состояния механизма управления, соединенных с приемопередатчиком, объект управления мишенью выполнен в виде несущей рамы, на которой расположен электронный блок управления, соединенный с подъемным механизмом мишени, расположенные в корпусе и представляющие собой герметизированную несущую конструкцию, один конец поворотного вала подъемного механизма крепится на боковых стенках корпуса в подшипниках, установленных в цилиндрические упорные втулки, закрепленные в установленные отверстия боковых стенок, на другом конце поворотного вала закреплен Г-образный поворотный рычаг, содержащий зажимное устройство держателя мишени, в котором крепится щит мишени, вращение поворотного вала осуществляется в зоне чувствительности бесконтактного датчика положения, установленного на заглушке втулки первого конца вала и соединенного с контроллером электронного блока управления, содержащего световой имитатор, звуковой имитатор, датчик поражения, и средства контроля функционирования электронного блока управления, соединенные с контролером и процессором, выполненным с возможностью приема команд управления и подачи их на подъемный механизм и на световой и звуковой имитаторы в заданные временные интервалы, с возможностью приема запроса состояния подъемного механизма и передачи статистической и диагностической информации в командный пункт.
Недостатками прототипа являются:
- ограниченные функциональные возможности системы автоматического управления комплексом полигонного оборудования;
- структурная сложность системы управления;
- недостаточная гибкость при реализации процесса изменения мишенной обстановки;
- ограниченные возможности по использованию в составе радиоуправляемого стрельбищного оборудования.
Предлагаемым изобретением решается задача по повышению эффективности управления сложными полигонными комплексами для стрелкового оружия.
Технический результат, получаемый при осуществлении изобретения, заключается в создании модуля управления полигонным оборудованием, обеспечивающего ручное и автоматическое управление мишенным оборудованием, дистанционное тестирование составных частей, отображение положения мишени, обработку информации о состоянии мишенного оборудования, результатах огневого поражения мишеней с учетом зон поражения, формирование групповых целей и сценария показа мишени и управление мишенным оборудованием в автоматическом режиме согласно заранее сформированному сценарию, а также в ручном режиме управления возможность показа мишенной обстановки по отдельным рубежам и отдельным целям.
Указанный технический результат достигается тем, что в предлагаемом модуле управления полигонным оборудованием, содержащем пульт управления с устройством отображения, выполненный в виде формирователей команд управления, запросов состояния мишенной установки и приемника данных о полученном состоянии, соединенных с приемопередатчиком, систему управления мишенной установкой с приемопередатчиком и антенно-фидерным устройством, блоком управления, состоящим из контроллера, процессора и средств контроля функционирования, автономный источник питания, датчики попадания и угла поворота, новым является то, что модуль управления полигонным оборудованием выполнен с возможностью ручного и автоматизированного управления модульной установкой предъявления появляющейся цели и сателлитом модульной установки предъявления появляющейся цели, модульной универсальной установкой предъявления перемещающейся цели по беспроводному каналу связи, обработки информации о состоянии мишенного оборудования, результатах огневого воздействия на мишени с учетом зон поражения, формирования групповых целей и сценариев показа мишеней и содержит базовый цифровой радиомодем и сервер последовательных устройств, персональный компьютер, оснащенный программным обеспечением, системы автоматического управления модульной установкой предъявления появляющейся цели, сателлитом модульной установки предъявления появляющейся цели, модульной универсальной установкой предъявления перемещающейся цели, система автоматического управления модульной установкой предъявления появляющейся цели имеет в своем составе вычислитель на базе микропроцессора, плату датчиков положения мишени, плату обработки сигналов попадания в мишень, плату контроля электропитания и состояния автономного источника электропитания, силовую плату управления двигателем и радиомодем, система автоматического управления сателлитом модульной установки предъявления появляющейся цели имеет в своем составе вычислитель на базе микропроцессора, плату датчиков положения мишени и силовую плату управления двигателем, система автоматического управления модульной универсальной установкой предъявления перемещающейся цели состоит из системы автоматического управления модульной установкой предъявления появляющейся цели и системы автоматического управления исполнительным устройством перемещения, содержащей в своем составе вычислитель на базе микропроцессора, систему навигации, плату контроля электропитания и состояния автономного источника электропитания, силовую плату управления двигателями и радиомодем.
Выполнение модуля управления полигонным оборудованием с возможностью ручного и автоматизированного управления полигонным оборудованием позволяет:
- осуществлять как раздельное управление модульной установкой предъявления появляющейся цели, сателлитом модульной установки предъявления появляющейся цели и модульной универсальной установкой предъявления перемещающейся цели, так и их совместное управление в составе комплекса полигонного оборудования;
- управлять мишенным оборудованием согласно заранее сформированному сценарию.
Включение в состав модуля управления полигонным оборудованием регулируемой по высоте антенной мачты, на которой установлены базовый цифровой радиомодем и сервер последовательных устройств, позволяет:
- обеспечить прием/передачу команд управления и эксплуатационной информации;
- обеспечить устойчивую радиосвязь между мишенным оборудованием и рабочим местом модуля управления полигонным оборудованием на дальности не менее 1000 м.
Включение в состав модуля управления полигонным оборудованием персонального компьютера, оснащенного специальным программным обеспечением, позволяет:
- обеспечить ручное и автоматическое управление мишенным оборудованием, дистанционное тестирование составных частей;
- обеспечить обработку информации о состоянии мишенного оборудования, результатах огневого поражения мишеней, наглядное отображение полученных данных на дисплее и хранение конечной информации;
- формирование групповых целей с возможностью определения поражения каждой мишени;
- формирование сценария показа мишени, хранение его в электронной памяти.
Включение в состав модуля управления полигонным оборудованием систем автоматического управления составными частями комплекса позволяет:
- организовать информационный взаимообмен между управляющей стороной и исполнительными устройствами;
- организовать двухуровневое управление исполнительными устройствами.
Включение в состав системы автоматического управления модульной установкой предъявления появляющейся цели вычислителя, платы датчиков положения мишени, платы обработки сигналов попадания в мишень, платы датчиков параметров окружающей среды, платы контроля электропитания, силовой платы управления и радиомодема позволяет:
- получать информацию от датчика положения мишени, от системы определения попадания в сектора мишени, о токе и напряжении автономного источника электропитания;
- передавать информацию с номером пораженного сектора, о времени от поднятия до ее поражения, о степени разряженности автономного источника электропитания;
- формировать управляющие сигналы на силовую плату управления двигателем.
Включение в состав системы автоматического управления сателлитом модульной установки предъявления появляющейся цели вычислителя, платы датчиков положения мишени и силовой плату управления двигателем позволяет:
- получать информацию от датчика положения мишени;
- передавать информацию с номером пораженного сектора, о времени от поднятия до ее поражения;
- формировать управляющие сигналы на силовую плату управления двигателем.
Включение в состав системы автоматического управления исполнительным устройством перемещения вычислителя, системы навигации, бесплатформенной инерциальную навигационную системы, платы датчиков параметров окружающей среды, платы контроля электропитания, силовой платы управления и радиомодема позволяет:
- получать информацию о маршруте и заданных параметрах движения
- получать информацию о местонахождении устройства и текущих параметрах движения;
- передавать информацию о координатах местоположения, о текущих параметрах движения, о степени разряженности автономного источника электропитания
- формировать управляющие сигналы на силовую плату управления двигателями правого и левого борта исполнительного устройства перемещения.
Включение в состав системы автоматического управления модульной установкой предъявления появляющейся цели системы навигации позволяет получать информацию о местонахождении мишенной установки.
Включение в состав системы автоматического управления сателлитом модульной установки предъявления появляющейся цели приемника GPS/ГЛОНАСС с антенным оборудованием позволяет обеспечить беспроводную связь сателлита с системой автоматического управления модулем управления полигонным оборудованием.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
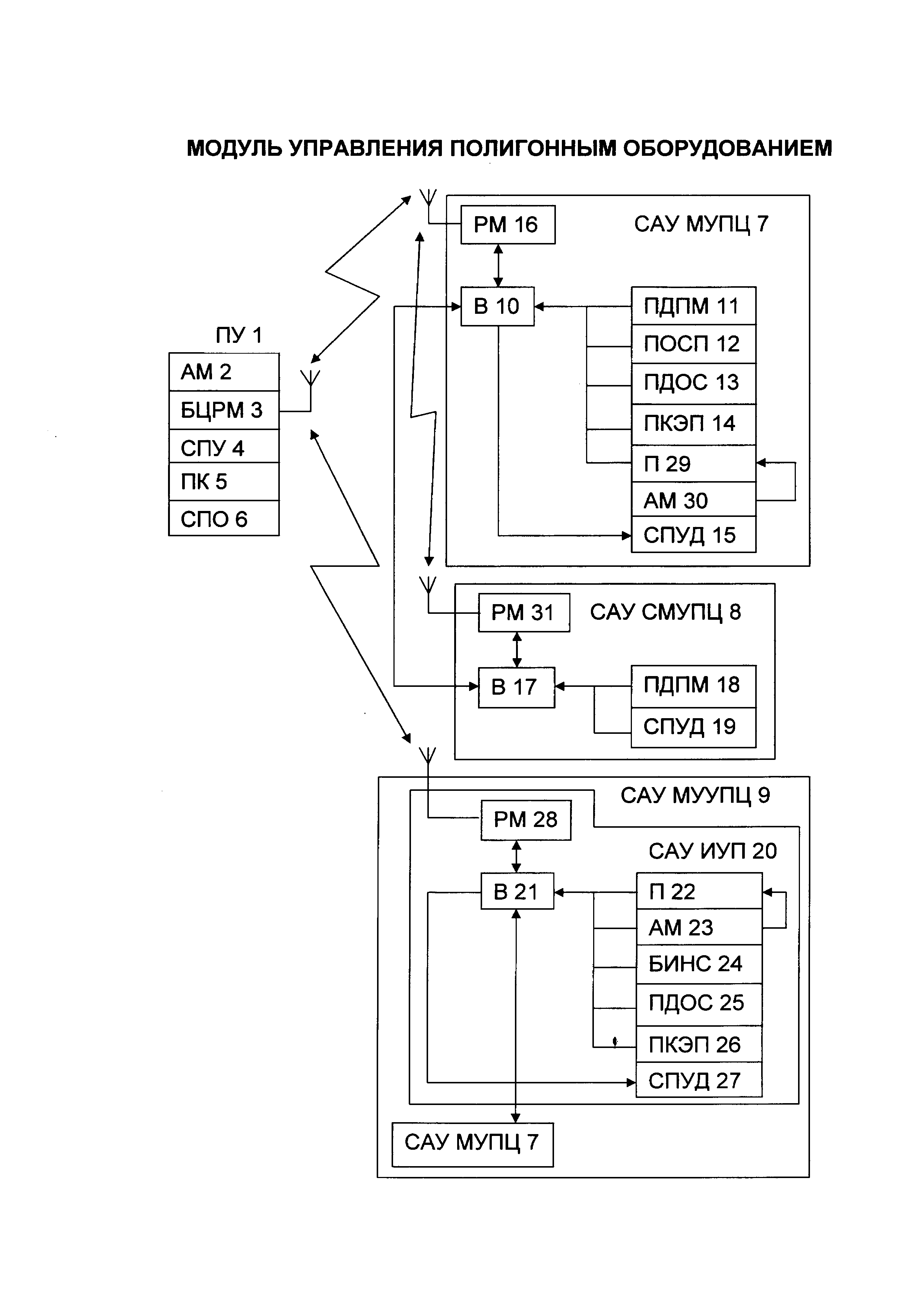
Сущность изобретения поясняется чертежом, где показана структурная схема модуля управления полигонным оборудованием.
Модуль управления полигонным оборудованием (МУПО) содержит пункт управления (ПУ) 1, состоящий из регулируемой по высоте антенной мачты (AM) 2, на которой установлены базовый цифровой радиомодем (БЦРМ) 3 и сервер последовательных устройств (СПУ) 4, и персонального компьютера (ПК) 5, оснащенного специальным программным обеспечением (СПО) 6, системы автоматического управления модульной установкой предъявления появляющейся цели (САУ МУПЦ) 7, сателлитом модульной установки предъявления появляющейся цели (САУ СМУПЦ) 8, модульной универсальной установкой предъявления перемещающейся цели (САУ МУУПЦ) 9. САУ МУПЦ 7 содержит вычислитель (В) 10 на базе микропроцессора, плату датчиков положения мишени (ПДПМ) 11, плату обработки сигналов попадания в мишень (ПОСП) 12, плату датчиков параметров окружающей среды (ПДОС) 13, плату контроля электропитания и состояния автономного источника электропитания (ПКЭП) 14, силовую плату управления двигателем (СПУД) 15 и радиомодем (РМ) 16. САУ СМУПЦ 8 содержит вычислитель (В) 17 на базе микропроцессора, плату датчиков положения мишени (ПДПМ) 18 и силовую плату управления двигателем (СПУД) 19. САУ МУУПЦ 9 состоит из САУ МУПЦ 7 и системы автоматического управления исполнительным устройством перемещения (САУ ИУП) 20, содержащей в своем составе вычислитель (В) 21 на базе микропроцессора, приемник (П) 22 GPS/ГЛОНАСС с антенным модулем (AM) 23, бесплатформенную инерциальную навигационную систему (БИНС) 24, плату датчиков параметров окружающей среды (ПДОС) 25, плату контроля электропитания и состояния автономного источника электропитания (ПКЭП) 26, силовую плату управления двигателями (СПУД) 27 и радиомодем (РМ) 28.
САУ МУПЦ 7 может быть дополнительно оснащена приемником (П) 29 GPS/ГЛОНАСС с антенным модулем (AM) 30.
САУ СМУПЦ 8 может быть дополнительно оснащена радиомодемом (РМ) 31.
Модуль управления полигонным оборудованием функционирует следующим образом. Модуль управления полигонным оборудованием
располагается на открытой местности вне зоны прямых попаданий пуль с вероятных направлений стрельбы и регулируется по высоте для обеспечения устойчивой радиосвязи. Управление движением ИУП, подъемом и опусканием щита мишени производится по командам, поступающим с пульта управления МУПО по радиоканалу. Проверяется выполнение всех команд на прямолинейное движение и повороты ИУП в ручном режиме. Убеждаются в наличии устойчивого сигнала системы спутниковой навигации. После вывода ИУП на исходную позицию с помощью ручного управления производится загрузка сценария упражнения, дается команда на выполнение сценария.
Организационно каждая САУ является независимым устройством, которое обладает своей функциональностью, может действовать по заложенной в него программе и в режиме ручного управления. САУ всех объектов передает телеметрические данные по запросу на БЦРМ 3. Пункт управления в определенном порядке (последовательно, с учетом назначенного приоритета) опрашивает все САУ объектов мишенного поля. САУ при этом действует по заложенной программе независимо от наличия связи с пультом управления, накапливая данные о происшедших событиях до запроса. САУ ИУП 20 имеет наиболее высокий приоритет опроса.
Входные сигналы и данные для САУ МУПЦ 7:
- информация от датчика положения мишени о ее положении (лежит, стоит, поднимается, опускается). В качестве такого датчика используется бесконтактный датчик, работающий на принципе эффекта Холла с дискретностью 0,3 градуса. Сигнал обрабатывается в ПДПМ 11;
- информация от системы определения попадания в сектора мишени (попал/не попал, номер сектора). Сигнал обрабатывается в ПОСП 12;
- информация о местоположении МУПЦ 6 по данным П 29 GPS/ГЛОНАСС с AM 30;
- информация о токе и напряжении автономного источника электропитания. Сигнал обрабатывается в ПКЭП 14;
- порядок показа мишеней (время показа, число показов, действия при попадании в различные сектора мишени).
Выходными сигналами для САУ МУПЦ 7 является информационная посылка переменной длины, формируемая в соответствии с протоколом обмена. Выходные сигналы и данные для САУ МУПЦ 7:
- координаты местоположения МУПЦ;
- номер пораженного сектора мишени;
- время поднятия мишени до ее поражения;
- степень разряженности автономного источника электропитания;
- служебное слово состояния;
- управляющие дискретные сигналы на СПУД 15.
САУ СМУПЦ 8 соединяется с САУ МУПЦ 7 кабелями питания и управления. При необходимости САУ СМУПЦ 8 может быть оснащена РМ 31, и тогда передача команд управления осуществляется по радиоканалу.
Входные сигналы и данные для САУ СМУПЦ 8:
- информация от датчика положения мишени о ее положении (лежит, стоит, поднимается, опускается). Сигнал обрабатывается в ПДПМ 18;
- порядок показа мишеней (время показа, число показов, действия при попадании в различные сектора мишени).
Выходные сигналы и данные для САУ СМУПЦ 8:
- время поднятия мишени до ее поражения;
- управляющие дискретные сигналы на СПУД 19.
Входные сигналы и данные для САУ ИУП 20:
- положение в пространстве (по данным БИНС 24);
- местонахождение ИУП (по данным П 22 GPS/ГЛОНАСС);
- параметры движения (совмещенные данные от П 22 GPS/ГЛОНАСС и БИНС 24, а также от датчиков оборотов ведущих колес);
- маршрут движения и заданная скорость.
Выходные сигналы и данные для САУ ИУП 20:
- координаты местоположения;
- фактические параметры движения;
- степень разряженности автономного источника электропитания;
- служебное слово состояния;
- управляющие аналоговые сигналы на СПУД 27.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании модуля управления полигонным оборудованием, обеспечивающего ручное и автоматическое управление мишенным оборудованием, дистанционное тестирование составных частей, отображение положения мишени, обработку информации о состоянии мишенного оборудования, результатах огневого поражения мишеней с учетом зон поражения, формирование групповых целей и сценария показа мишени и управление мишенным оборудованием в автоматическом режиме согласно заранее сформированному сценарию, а также в ручном режиме управления возможность показа мишенной обстановки по отдельным рубежам и отдельным целям.
Модуль управления полигонным оборудованием, содержащий пульт управления с устройством отображения, выполненный в виде формирователей команд управления, запросов состояния мишенной установки и приемника данных о полученном состоянии, соединенных с приемопередатчиком, систему управления мишенной установкой с приемопередатчиком и антенно-фидерным устройством, блоком управления, состоящим из контроллера, процессора и средств контроля функционирования, автономный источник питания, датчики попадания и угла поворота, отличающийся тем, что модуль управления полигонным оборудованием выполнен с возможностью ручного и автоматизированного управления модульной установкой предъявления появляющейся цели и сателлитом модульной установки предъявления появляющейся цели, модульной универсальной установкой предъявления перемещающейся цели по беспроводному каналу связи, обработки информации о состоянии мишенного оборудования, результатах огневого воздействия на мишени с учетом зон поражения, формирования групповых целей и сценариев показа мишеней и содержит базовый цифровой радиомодем и сервер последовательных устройств, персональный компьютер, оснащенный программным обеспечением, системы автоматического управления модульной установкой предъявления появляющейся цели, сателлитом модульной установки предъявления появляющейся цели, модульной универсальной установкой предъявления перемещающейся цели, система автоматического управления модульной установкой предъявления появляющейся цели имеет в своем составе вычислитель на базе микропроцессора, плату датчиков положения мишени, плату обработки сигналов попадания в мишень, плату контроля электропитания и состояния автономного источника электропитания, силовую плату управления двигателем и радиомодем, система автоматического управления сателлитом модульной установки предъявления появляющейся цели имеет в своем составе вычислитель на базе микропроцессора, плату датчиков положения мишени и силовую плату управления двигателем, система автоматического управления модульной универсальной установкой предъявления перемещающейся цели состоит из системы автоматического управления модульной установкой предъявления появляющейся цели и системы автоматического управления исполнительным устройством перемещения, содержащей в своем составе вычислитель на базе микропроцессора, систему навигации, плату контроля электропитания и состояния автономного источника электропитания, силовую плату управления двигателями и радиомодем.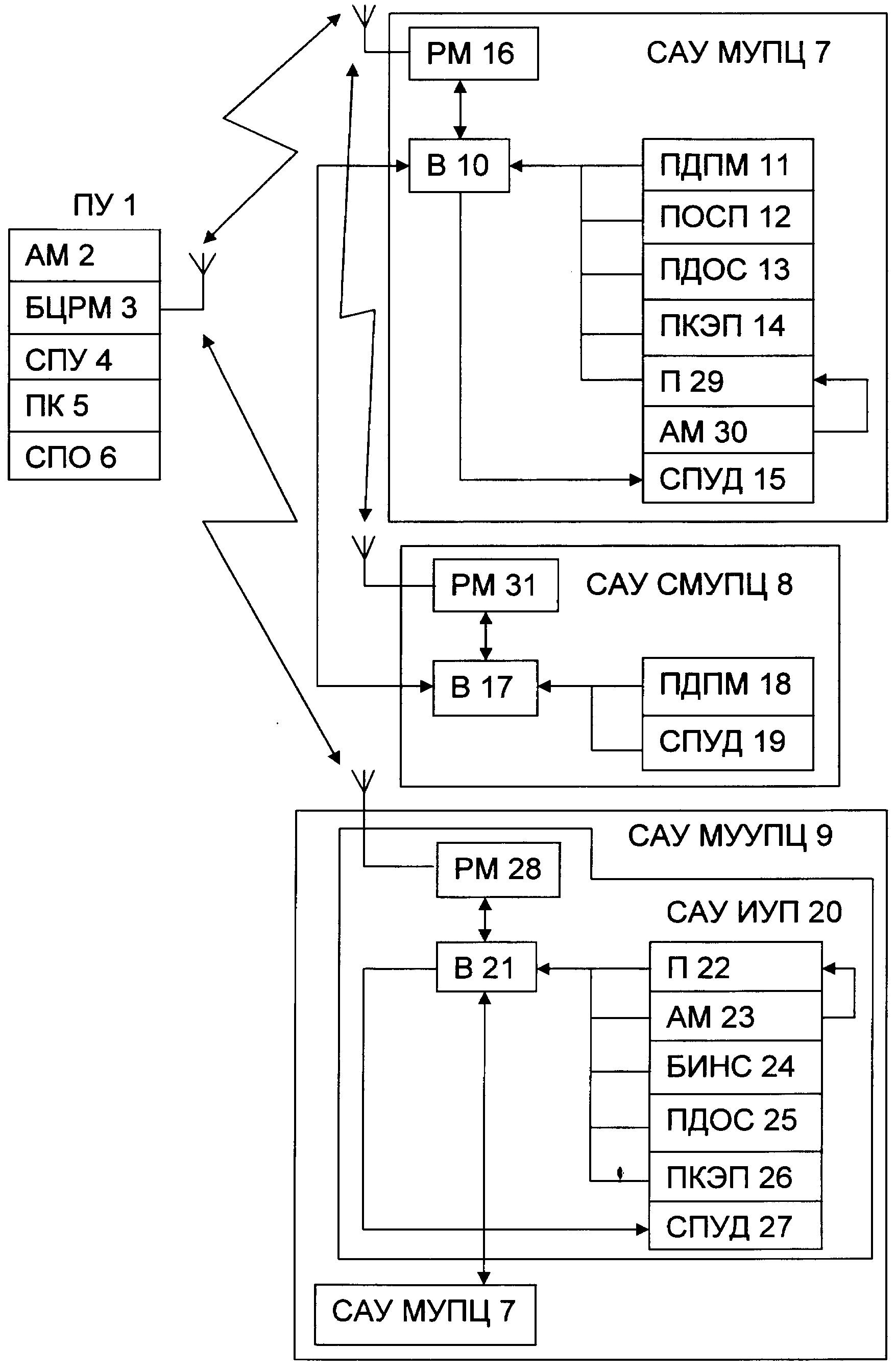
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет
Способ создания топогеодезических сетей для подготовки боевых действий ракетных войск, артиллерии и противовоздушной обороны сухопутных войск
Самодвижущаяся платформа робототехнического комплекса
Устройство для закрепления пустотелой детали
Огнестрельное автоматическое оружие
Пулемет
Способ установки специального программно-математического обеспечения на бортовом компьютере программно-аппаратного комплекса топопривязчика
Способ информационно-технического сопряжения информационно-управляющего вычислителя с блоком управления двигателями мобильного робототехнического комплекса
Исполнительное устройство перемещения
Храповое устройство для стопорения вала
Система для определения и обеспечения показателей надёжности объекта военной техники
Имитатор воздушных целей
Система управления многофункционального робототехнического комплекса обеспечения боевых действий
Регулируемый спусковой механизм огнестрельного оружия

