Результат интеллектуальной деятельности: УСТРОЙСТВО ОЦЕНКИ СОБСТВЕННОЙ ПОЗИЦИИ И СПОСОБ ОЦЕНКИ СОБСТВЕННОЙ ПОЗИЦИИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству оценки собственной позиции и к способу оценки собственной позиции, которые оценивают позицию транспортного средства.
Уровень техники
[0002] Известен способ оценки позиции транспортного средства посредством сопоставления картографической информации и информации, обнаруженной посредством датчиков, таких как камера и дальномер. Точность оценки собственной позиции может повышаться посредством использования картографической информации с трехмерной информацией, но этот способ имеет проблемы увеличения затрат на создание картографической информации и увеличения нагрузки по обработке при оценке собственной позиции. Между тем, предложена технология, в которой мобильный объект оценивает позицию себя посредством использования картографической информации, имеющей информацию в отношении ориентиров, описанных в качестве двумерной информации (см. патентный документ 1). Эта технология может сокращать затраты на создание картографической информации и нагрузку по обработке при оценке собственной позиции.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2008-250906
Сущность изобретения
Техническая задача
[0004] Тем не менее, технология, описанная в патентном документе 1, основана на таком допущении, что информация, полученная посредством датчиков и сопоставляемая с картографической информацией для оценки собственной позиции, является информацией, полученной в пределах предварительно определенного расстояния от последней собственной позиции. В этом случае, когда линейный маршрут продолжается на предварительно определенное расстояние или более, и информация в отношении ориентира описывается как прямая линия, параллельная маршруту, имеется определенная степень свободы в направлении вдоль прямой линии, и это может приводить к уменьшению точности оценки собственной позиции.
[0005] С учетом вышеописанных проблем, цель настоящего изобретения заключается в том, чтобы предоставлять устройство оценки собственной позиции и способ оценки собственной позиции, которые позволяют повышать точность оценки собственной позиции.
Решение задачи
[0006] Устройство оценки собственной позиции выбирает, на основе углов, сформированных посредством линий пересечения между прямыми линиями, полученных посредством использования ориентиров вокруг, фрагменты данных позиций ориентиров, которые должны использоваться для оценки собственной позиции, и сопоставляет выбранные фрагменты данных позиций ориентиров и позиции ориентиров в картографической информации, чтобы оценивать позицию транспортного средства.
Преимущества изобретения
[0007] Настоящее изобретение может предоставлять устройство оценки собственной позиции и способ оценки собственной позиции, которые позволяют повышать точность оценки собственной позиции посредством выбора, на основе углов, сформированных посредством пересекающихся прямых линий между прямыми линиями, полученных посредством использования ориентиров вокруг, фрагментов данных позиций ориентиров, которые должны использоваться для оценки собственной позиции, фрагментов данных, которые должны использоваться в оценке собственной позиции.
Краткое описание чертежей
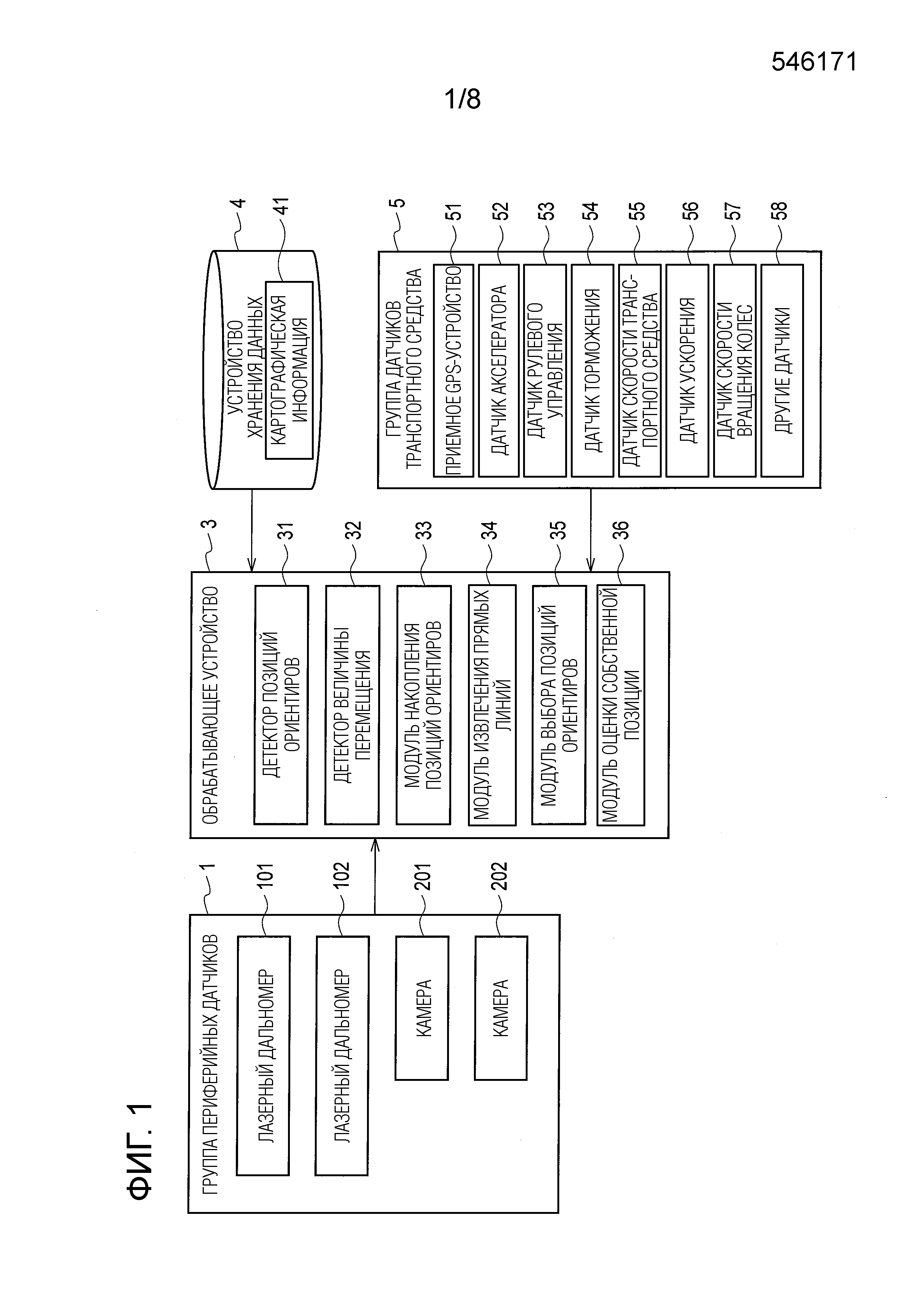
[0008] Фиг. 1 является блок-схемой, поясняющей пример конфигурации устройства оценки собственной позиции согласно варианту осуществления настоящего изобретения.
Фиг. 2 является примером, иллюстрирующим лазерные дальномеры и камеры, смонтированные в транспортном средстве.
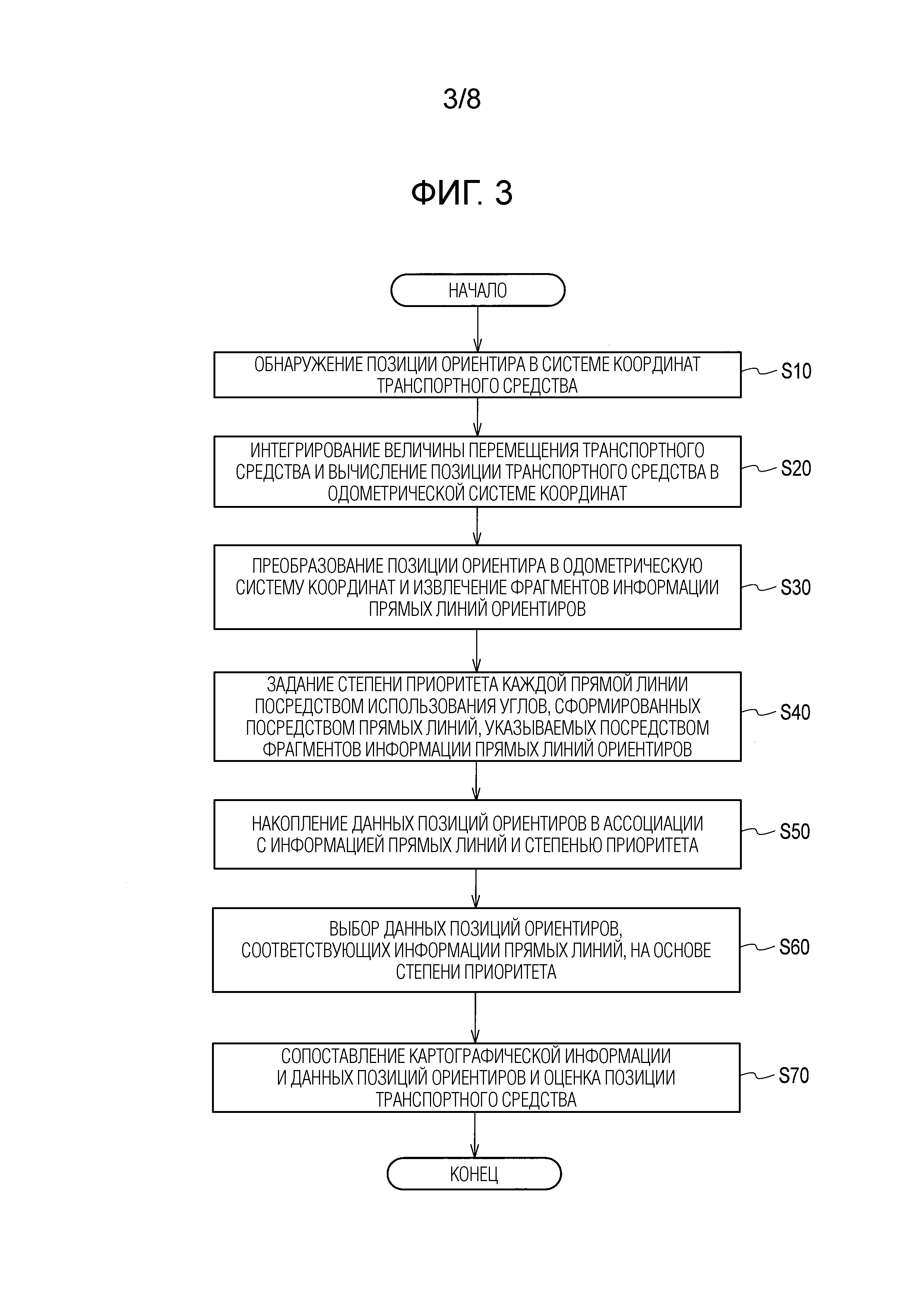
Фиг. 3 является блок-схемой последовательности операций способа, поясняющей последовательность операций обработки устройства оценки собственной позиции согласно варианту осуществления настоящего изобретения.
Фиг. 4 является примером, иллюстрирующим окружение, в котором движется транспортное средство с установленным устройством оценки собственной позиции согласно варианту осуществления настоящего изобретения.
Фиг. 5 является видом, поясняющим область, указываемую посредством модуля задания областей, включенного в устройство оценки собственной позиции согласно варианту осуществления настоящего изобретения.
Фиг. 6 является схемой, поясняющей обработку, выполняемую посредством детектора позиций ориентиров, включенного в устройство оценки собственной позиции согласно варианту осуществления настоящего изобретения.
Фиг. 7 является схемой, поясняющей обработку, выполняемую посредством детектора величины перемещения, включенного в устройство оценки собственной позиции согласно варианту осуществления настоящего изобретения.
Фиг. 8 является схемой, поясняющей обработку, выполняемую посредством модуля извлечения прямых линий, включенного в устройство оценки собственной позиции согласно варианту осуществления настоящего изобретения.
Фиг. 9 является примером, иллюстрирующим фрагменты информации прямых линий, извлеченной посредством модуля извлечения прямых линий в то время, когда транспортное средство движется.
Фиг. 10 является таблицей, иллюстрирующей фрагменты информации прямых линий, извлеченной посредством модуля извлечения прямых линий и полученные времена.
Фиг. 11 является таблицей, поясняющей состояние, в котором приоритет задается для каждой комбинации фрагментов информации прямых линий, на основе углов, сформированных посредством пересекающихся прямых линий.
Фиг. 12 является таблицей, поясняющей состояние, в котором приоритет задается для каждого фрагмента информации прямых линий согласно полученным временам и углам, сформированным посредством пересекающихся прямых линий.
Подробное описание вариантов осуществления
[0009] Ниже описывается вариант осуществления настоящего изобретения со ссылкой на чертежи. В описании чертежей, идентичные или аналогичные части обозначаются посредством идентичных или аналогичных ссылок с номерами, и перекрывающееся описание опускается.
[0010] Устройство оценки собственной позиции
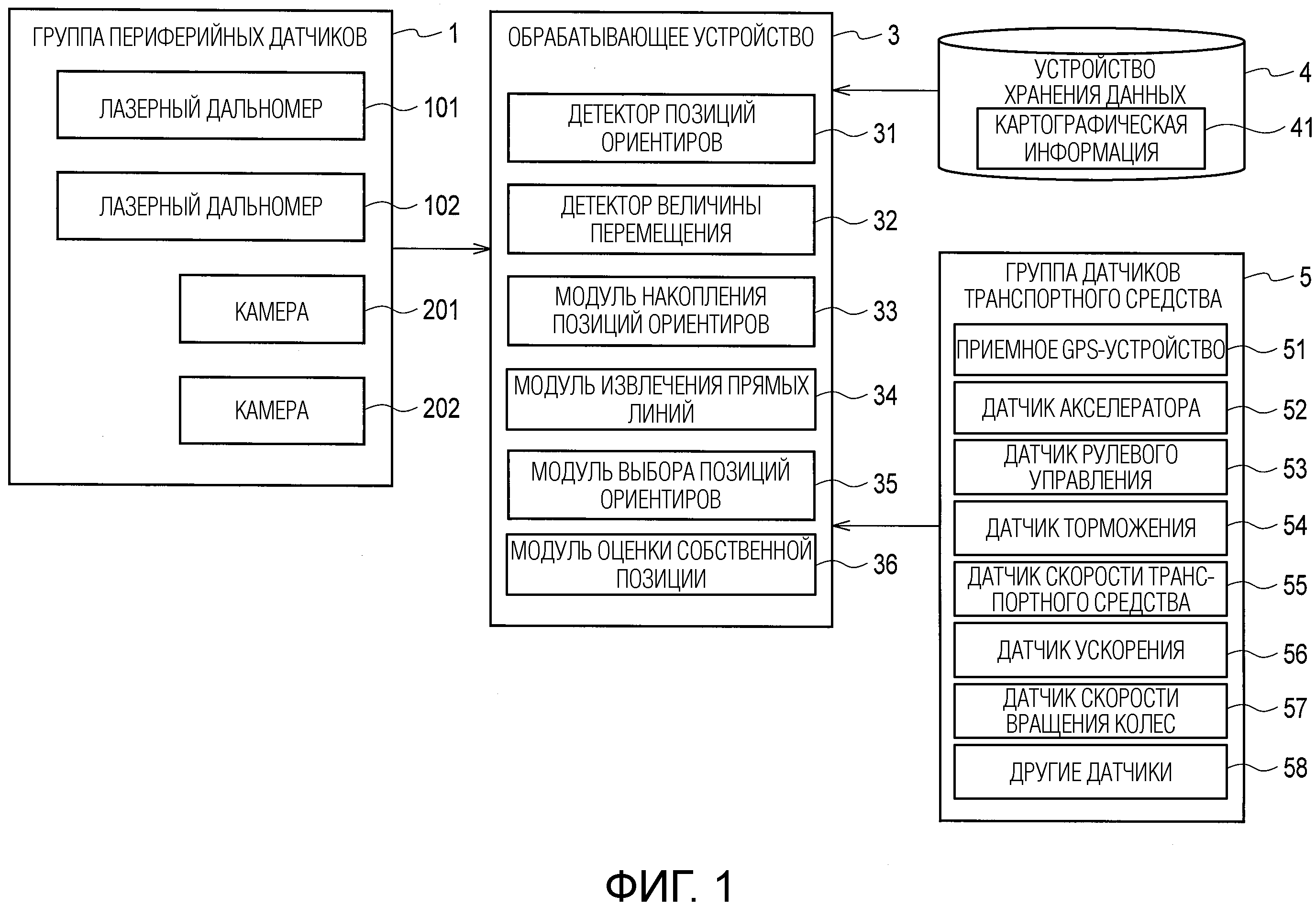
Фиг. 1 является видом, поясняющим конфигурацию устройства оценки собственной позиции согласно варианту осуществления. Устройство оценки собственной позиции согласно варианту осуществления включает в себя группу 1 периферийных датчиков, обрабатывающее устройство 3, устройство 4 хранения данных и группу 5 датчиков транспортного средства. Устройство оценки собственной позиции согласно варианту осуществления монтируется в транспортном средстве V (см. фиг. 2) и оценивает позицию транспортного средства V.
[0011] В варианте осуществления оцениваются позиция и угол ориентации всего с тремя степенями свободы на двумерной плоскости, причем три степени свободы включают в себя: позицию (координату X (м)) в направлении восток-запад (в направлении по оси X) и позицию (координату Y (м)) в направлении север-юг (в направлении по оси Y), которые представляют собой оцененную собственную позицию транспортного средства V; и азимутальный угол θ (угол относительно вертикальной оси (рад)) транспортного средства, который является информацией угла ориентации.
[0012] Группа 1 периферийных датчиков включает в себя, например, несколько лазерных дальномеров 101, 102 (LRF), выполненных с возможностью обнаруживать расстояние до цели посредством использования отражения лазерного излучения, падающего на цель, и несколько камер 201, 202, выполненных с возможностью захватывать цифровое изображение, которое может подвергаться обработке изображений. Как описано выше, группа 1 периферийных датчиков включает в себя несколько датчиков, которые обнаруживают ориентиры, присутствующие вокруг транспортного средства V.
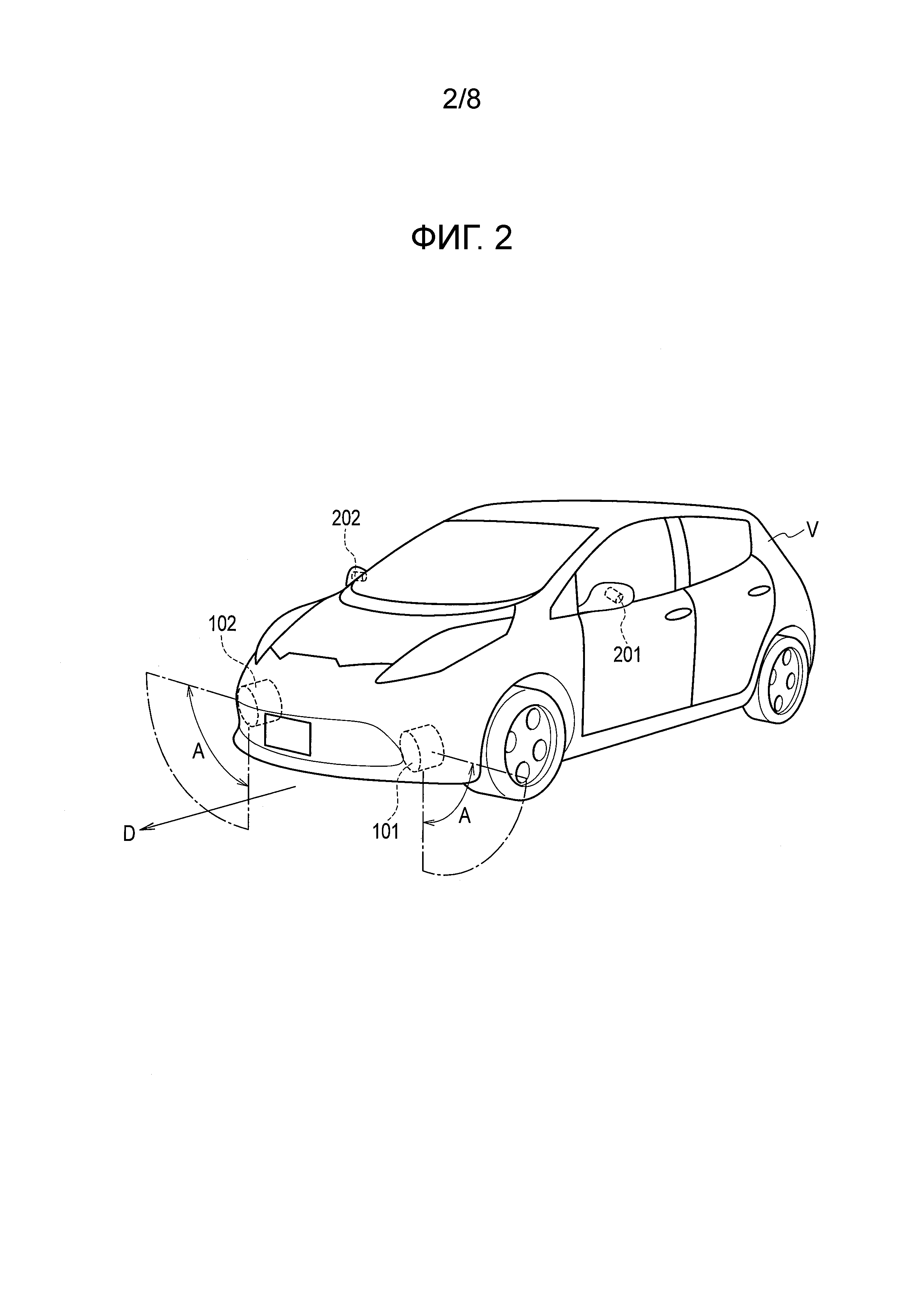
[0013] Фиг. 2 является примером, иллюстрирующим состояние, в котором группа 1 периферийных датчиков монтируется в транспортном средстве V. LRF 101, 102 могут монтироваться, например, около левого и правого передних крыльев транспортного средства V. Например, LRF 101, 102 выполняют сканирование в пределах предварительно определенного угла θ сканирования (например, 90°) с осью поворота сканирования, идущей в продольном направлении D транспортного средства V, так что траектории излучаемого лазерного света формируют плоскость, перпендикулярную поверхности дороги. LRF 101, 102 могут за счет этого обнаруживать ориентиры, такие как бордюры, присутствующие в направлении слева направо транспортного средства V. LRF 101, 102 выводят формы обнаруженных ориентиров друг за другом в обрабатывающее устройство 3 в качестве результатов обнаружения.
[0014] Например, камеры 201, 202 могут монтироваться в левом и правом боковых зеркалах транспортного средства V. Камеры 201, 202 захватывают изображения посредством использования, например, полупроводниковых элементов формирования изображений, таких как CCD или CMOS. Камеры 201, 202 захватывают, например, изображения поверхности дороги на поперечных сторонах транспортного средства V. Камеры 201, 202 выводят захваченные изображения в обрабатывающее устройство 3 друг за другом.
[0015] Устройство 4 хранения данных представляет собой устройство хранения картографической информации, выполненное с возможностью сохранять картографическую информацию 41, включающую в себя позиции ориентиров, присутствующих вокруг дорог. Устройство 4 хранения данных может формироваться из полупроводникового запоминающего устройства, магнитного диска и т.п. Ориентиры, записываемые в картографическую информацию 41, включают в себя, например, знаки на поверхности дороги, указывающие стоп-линии, пешеходные переходы, дорожные знаки оповещения относительно пешеходных переходов, линии со штриховкой и т.п., конструкции, такие как бордюры и различные установки, которые могут обнаруживаться посредством группы 1 периферийных датчиков. В картографической информации 41 ориентиры, которые фактически имеют определенные высоты, такие как бордюры, также описываются только посредством информации позиции на двумерной плоскости. В картографической информации 41 информация позиции относительно каждого из бордюров, сигнальных линий дорожной разметки и т.п. задается посредством сбора фрагментов информации прямых линий, имеющей двумерную информацию на обоих концах. В картографической информации 41, когда форма ориентира в фактическом окружении является кривой, ориентир описывается как фрагменты информации прямых линий на двумерной плоскости, приблизительно рисующих кривую посредством ломаных линий.
[0016] Группа 5 датчиков транспортного средства включает в себя приемное GPS-устройство 51, датчик 52 акселератора, датчик 53 рулевого управления, датчик 54 торможения, датчик 55 скорости транспортного средства, датчик 56 ускорения, датчик 57 скорости вращения колес и другие датчики 58, к примеру, датчик скорости относительно вертикальной оси. Датчики 51-58 соединяются с обрабатывающим устройством 3 и выводят различные результаты обнаружения в обрабатывающее устройство 3 друг за другом. Обрабатывающее устройство 3 может вычислять аппроксимирующую позицию транспортного средства V в картографической информации 41 посредством использования результатов обнаружения группы 5 датчиков транспортного средства и вычислять одометрию, указывающую величину перемещения транспортного средства V в единицу времени.
[0017] Обрабатывающее устройство 3 включает в себя детектор 31 позиций ориентиров, детектор 32 величины перемещения, модуль 33 накопления позиций ориентиров, модуль 34 извлечения прямых линий, модуль 35 выбора позиций ориентиров и модуль 36 оценки собственной позиции. Обрабатывающее устройство 3 может формироваться, например, из микроконтроллера, который представляет собой интегральную схему, включающую в себя центральный процессор (CPU), запоминающее устройство, интерфейс ввода-вывода и т.п. В этом случае несколько информационных процессоров (31-36), формирующих обрабатывающее устройство 3, реализуются посредством CPU, выполняющего компьютерную программу, установленную заранее в микроконтроллере. Части, формирующие обрабатывающее устройство 3, могут формироваться из нераздельного фрагмента аппаратных средств или отдельных фрагментов аппаратных средств. Микроконтроллер также может служить в качестве электронного модуля управления (ECU), используемого для другого управления, ассоциированного с транспортным средством V, такого как, например, управление автоматическим вождением.
[0018] Детектор 31 позиций ориентиров обнаруживает позиции ориентиров, присутствующих вокруг транспортного средства V относительно транспортного средства V, на основе результатов обнаружения по меньшей мере одного из LRF 101, 102 и камер 201, 202. Позиции, обнаруженные посредством детектора 31 позиций ориентиров, представляют собой позиции в системе координат транспортного средства. Система координат транспортного средства, например, представляет собой систему, в которой центр задней оси транспортного средства V задается в качестве начала координат, прямое направление задается в качестве положительного направления оси X, направление влево задается в качестве положительного направления оси Y, и направление вверх задается в качестве положительного направления оси Z. Кроме того, формула для преобразования из систем координат LRF 101, 102 и камер 201, 202 в систему координат транспортного средства задается заранее в детекторе 31 позиций ориентиров. Параметры поверхностей дороги в системе координат транспортного средства задаются аналогично.
[0019] Детектор 32 величины перемещения обнаруживает одометрию, которая является величиной перемещения транспортного средства V в единицу времени, на основе информации результатов обнаружения по меньшей мере одного из датчиков, включенных в группу 5 датчиков транспортного средства. Величина перемещения транспортного средства V обнаруживается в качестве величины перемещения в одометрической системе координат. Модуль 33 накопления позиций ориентиров накапливает, в качестве фрагментов данных позиций ориентиров, позиции ориентиров, обнаруженных посредством детектора 31 позиций ориентиров в прошлом с предварительно определенными интервалами, на основе величины перемещения, обнаруженной посредством детектора 32 величины перемещения.
[0020] Модуль 34 извлечения прямых линий извлекает фрагменты информации прямых линий посредством использования фрагментов данных позиций ориентиров, накопленных в модуле 33 накопления позиций ориентиров. Модуль 35 выбора позиций ориентиров выбирает фрагменты данных позиций ориентиров из прямых линий, указываемых посредством фрагментов информации прямых линий, извлеченной посредством модуля 34 извлечения прямых линий, на основе углов в 90° или меньше, сформированных посредством комбинаций пересекающихся прямых линий. Модуль 36 оценки собственной позиции оценивает позицию транспортного средства V посредством сопоставления фрагментов сопоставления фрагментов данных позиций ориентиров, выбранных посредством модуля 35 выбора позиций ориентиров, и позиций ориентиров в картографической информации 41.
[0021] Модуль 35 выбора позиций ориентиров задает приоритеты фрагментов информации прямых линий таким образом, что комбинациям прямых линий, формирующих углы в 90° или меньше, присваивается высокий приоритет в порядке убывания сформированного угла. Затем модуль 35 выбора позиций ориентиров выбирает фрагменты данных позиций ориентиров в порядке по убыванию приоритетов, заданных для фрагментов информации прямых линий. В частности, модуль 35 выбора позиций ориентиров выбирает, из фрагментов данных позиций ориентиров, накопленных в модуле 33 накопления позиций ориентиров, фрагменты данных позиций ориентиров, соответствующие фрагментам информации прямых линий, по меньшей мере, относительно комбинации пересекающихся прямых линий, формирующих наибольший угол из углов в 90° или меньше, сформированных посредством комбинаций пересекающихся прямых линий.
[0022] Модуль 35 выбора позиций ориентиров задает высокий приоритет для каждого фрагмента информации прямых линий в порядке убывания времени получения соответствующего фрагмента данных позиций ориентиров. Затем модуль 35 выбора позиций ориентиров выбирает фрагменты данных позиций ориентиров в порядке по убыванию приоритетов, заданных для фрагментов информации прямых линий. Приоритет, заданный для каждого фрагмента информации прямых линий, изменяется время от времени на основе времени получения соответствующих фрагментов данных позиций ориентиров и угла, сформированного посредством прямой линии, которая представляет собой проведенную линию фрагмента информации прямых линий.
[0023] Модуль 33 накопления позиций ориентиров определяет фрагменты данных позиций ориентиров, которые должны накапливаться, на основе приоритета каждого фрагмента информации прямых линий, заданной посредством модуля 35 выбора позиций ориентиров. В частности, модуль 33 накопления позиций ориентиров предпочтительно накапливает фрагменты данных позиций ориентиров, соответствующих фрагменту информации прямых линий с высоким приоритетом, и предпочтительно удаляет фрагменты данных позиций ориентиров, соответствующих фрагменту информации прямых линий с низким приоритетом.
[0024] Способ оценки собственной позиции
Ниже описывается пример способа оценки собственной позиции с использованием устройства оценки собственной позиции согласно варианту осуществления со ссылкой на блок-схему последовательности операций способа по фиг. 3.
[0025] Во-первых, на этапе S10 детектор 31 позиций ориентиров обнаруживает позицию каждого ориентира вокруг транспортного средства V, на основе результатов обнаружения группы 1 периферийных датчиков. Детектор 31 позиций ориентиров получает результаты обнаружения LRF 101, 102 и камер 201, 202 и обнаруживает позиции знаков на поверхности дороги, таких как линии со штриховкой и стоп-линии, и конструкций, таких как бордюры и здания в системе координат транспортного средства.
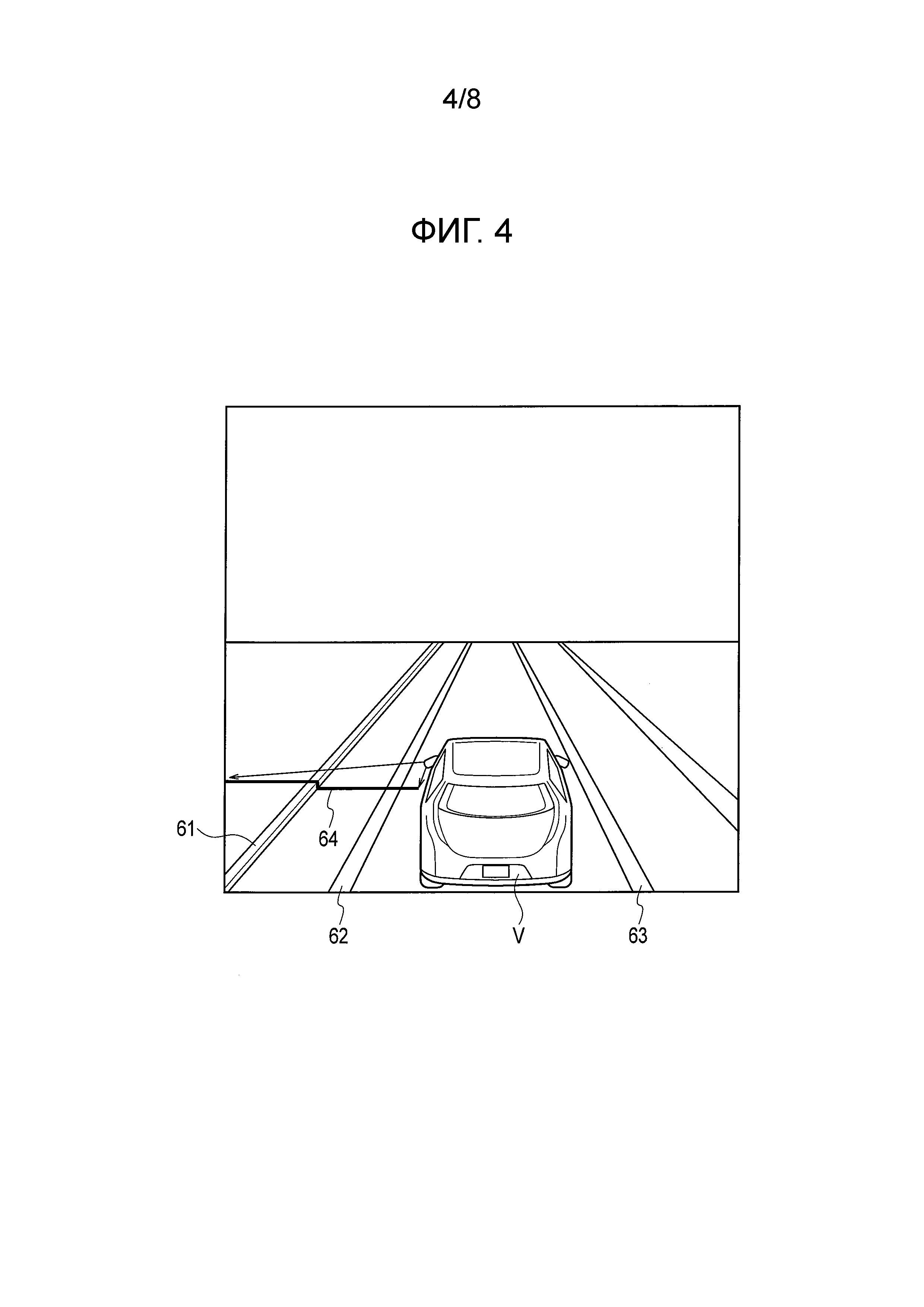
[0026] Фиг. 4 является примером, иллюстрирующим окружение, в котором транспортное средство V движется при выполнении оценки собственной позиции. В примере, проиллюстрированном на фиг. 4, лазерное излучение, испускаемое из LRF 101, падает на поверхность дороги, включающую в себя бордюр 61, как проиллюстрировано посредством линии 64. Детектор 31 позиций ориентиров извлекает позицию, в которой форма значительно изменяется, в качестве позиции бордюра 61, посредством использования направления и расстояния падающего лазерного излучения и обнаруживает его позицию (x, y, z) в системе координат транспортного средства. Поскольку можно допускать то, что поверхность дороги постоянно присутствует в направлении вертикально вниз LRF 101, 102, бордюр может обнаруживаться посредством сравнения высоты каждой точки с высотой поверхности дороги и извлечения точки большого изменения высоты.
[0027] Кроме того, детектор 31 позиций ориентиров обнаруживает сигнальные линии 62, 63 дорожной разметки, присутствующие с обеих сторон транспортного средства V, посредством использования информации яркости изображений, захваченных посредством камер 201, 202. Например, детектор 31 позиций ориентиров может обнаруживать рисунок изменения яркости, в котором яркость изменяется с темной на яркую и затем на темную, в полутоновых изображениях, захваченных посредством камер 201, 202, и за счет этого обнаруживать центры светлых участков в качестве сигнальных линий 62, 63 дорожной разметки. Позиции (x, y, z) сигнальных линий 62, 63 дорожной разметки в системе координат транспортного средства могут обнаруживаться посредством использования позиционных взаимосвязей между поверхностью дороги и камерами 201, 202. Информация высоты (компонент по оси Z) позиций (x, y, z) в системе координат транспортного средства, обнаруженная на этапе S10, исключается, и позиции далее обрабатываются в качестве двумерных данных.
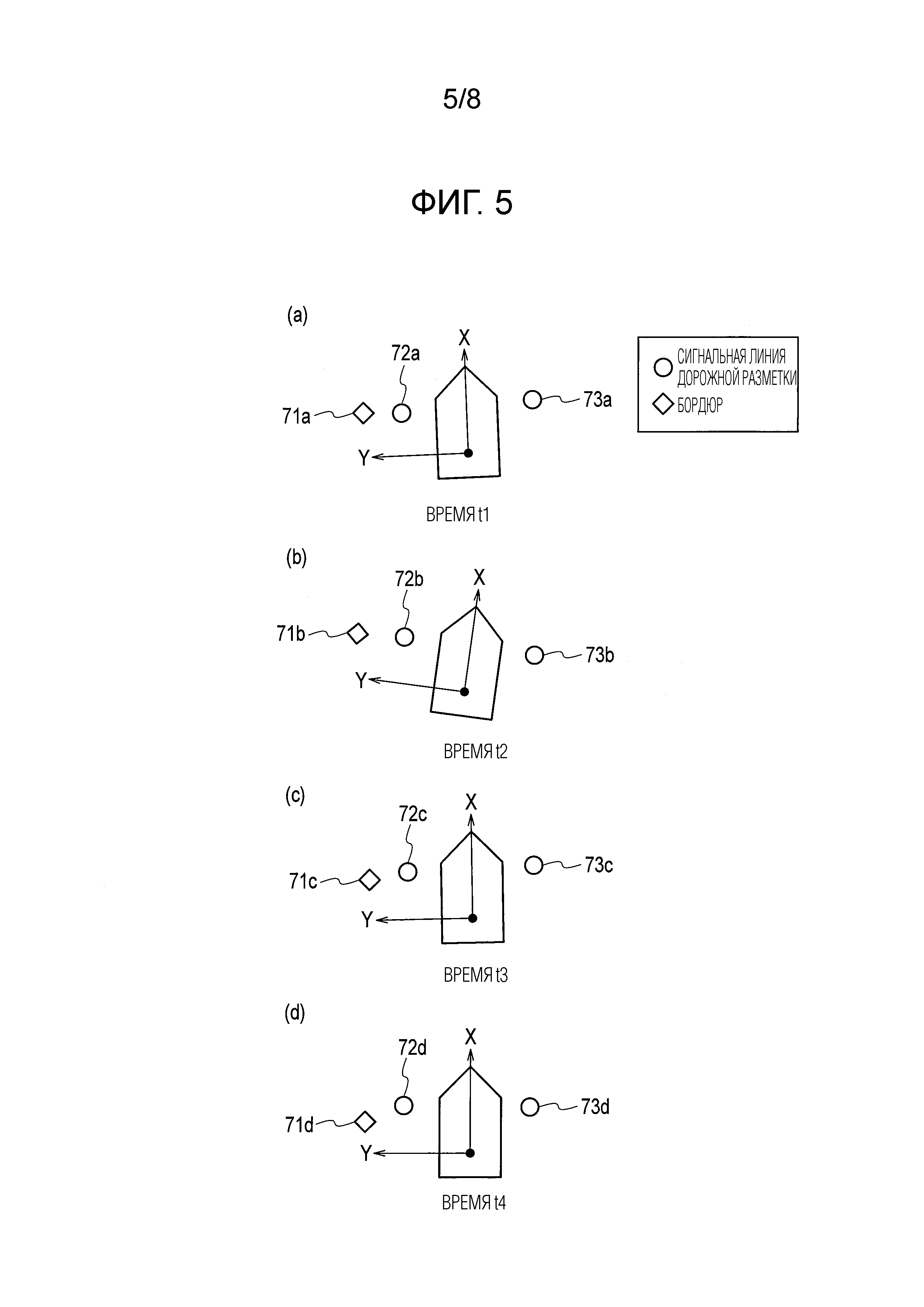
[0028] Часть (a)-(d) по фиг. 5 являются схемами, иллюстрирующими позицию 71 бордюра 61 и позиции 72, 73 сигнальных линий 62, 63 дорожной разметки в системе координат транспортного средства, которые обнаруживаются посредством детектора 31 позиций ориентиров в период от времени t1 до t4 в примере, проиллюстрированном на фиг. 4. Время t1 является самым ранним временем, и время t4 является последним временем.
[0029] На этапе S20 детектор 32 величины перемещения интегрирует величину перемещения транспортного средства V, вычисленную на основе результатов обнаружения группы 5 датчиков транспортного средства, чтобы вычислять позицию транспортного средства V в одометрической системе координат. Одометрическая система координат, например, может представлять собой систему, в которой позиция транспортного средства V в то время, когда устройство оценки собственной позиции включается, или когда обработка сбрасывается, задается в качестве начала координат, и азимутальный угол транспортного средства V в это время задается в качестве 0°. Интегрирование величины перемещения транспортного средства V выполняется в одометрической системе координат.
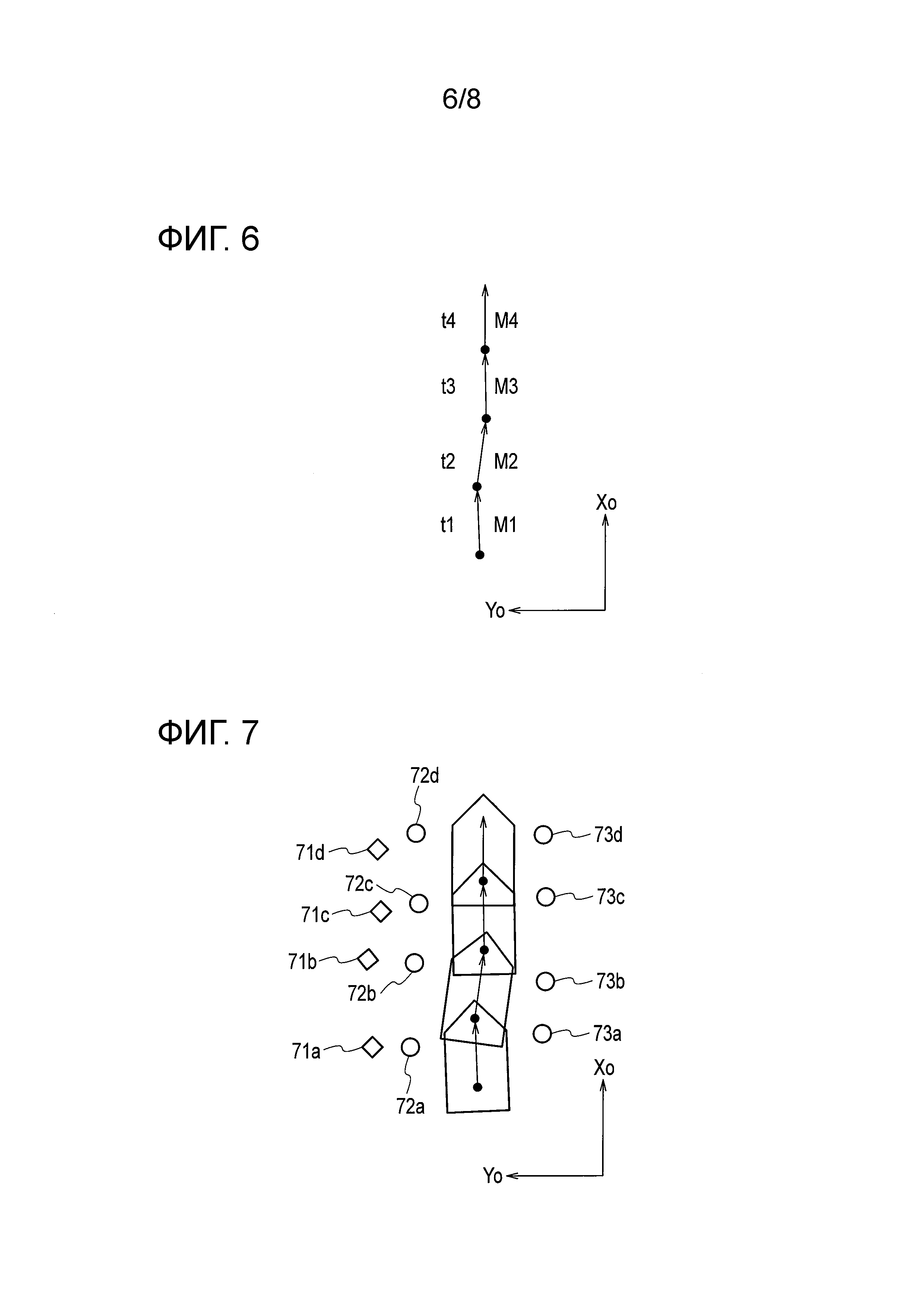
[0030] Фиг. 6 является схемой, иллюстрирующей результат интегрирования величины перемещения транспортного средства V, вычисленной на основе результатов обнаружения группы 5 датчиков транспортного средства в примере, проиллюстрированном в частях (a)-(d) по фиг. 5. Детектор 32 величины перемещения за счет этого вычисляет позицию (Xo, Yo) транспортного средства V в одометрической системе координат.
[0031] Фиг. 7 является схемой, иллюстрирующей фрагменты данных позиций ориентиров, преобразованных во фрагменты данных в одометрической системе координат в примерах, проиллюстрированных на фиг. 5 и 6. Модуль 33 накопления позиций ориентиров преобразует позицию каждого ориентира, обнаруженного на этапе S10, во фрагмент данных в одометрической системе координат на основе величины перемещения, обнаруженной на этапе S20, и накапливает фрагмент преобразованных данных в качестве фрагмента данных позиций ориентиров.
[0032] На этапе S30 модуль 34 извлечения прямых линий извлекает каждый фрагмент информации прямых линий посредством использования фрагментов данных позиций ориентиров, накопленных в модуле 33 накопления позиций ориентиров. Модуль 34 извлечения прямых линий извлекает прямую линию посредством использования фрагментов данных позиций ориентиров, полученных в период от времени t0 до t0+Δt, где Δt является единицей времени. Число фрагментов данных позиций ориентиров, получаемых в единицу Δt времени, определяется в зависимости от периодов дискретизации LRF 101, 102 и камер 201, 202. Кроме того, модуль 34 извлечения прямых линий может определять то, находится позиция каждого ориентира на левой стороне или на правой стороне относительно транспортного средства V, посредством определения того, является значение координаты Y в системе координат транспортного средства положительным или отрицательным. Соответственно, модуль 34 извлечения прямых линий группирует фрагменты данных позиций ориентиров на фрагменты данных на правой стороне и фрагменты данных на левой стороне и затем выполняет оценку параметров каждой прямой линии.
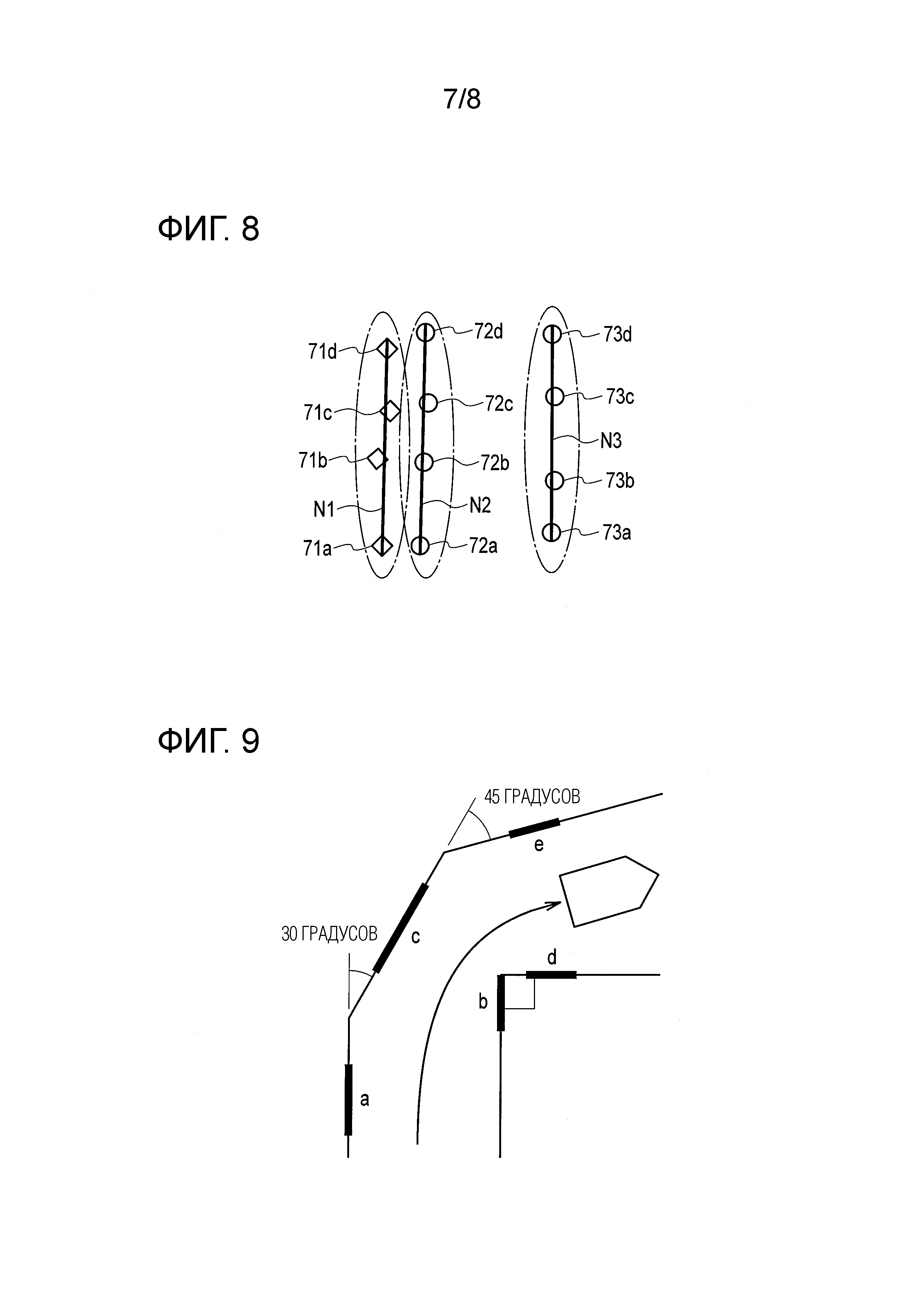
[0033] Фиг. 8 является схемой, иллюстрирующей фрагменты информации N1, N2, N3 прямых линий, извлеченной посредством модуля 34 извлечения прямых линий в примере, проиллюстрированном на фиг. 7. Облака точек, указываемые посредством фрагментов данных позиций ориентиров, являются двумерной информацией. Соответственно, модуль 34 извлечения прямых линий может оценивать каждую прямую линию посредством применения прямой линии ax+by+c=0 к точкам pi=(xi, yi), обнаруженным в качестве сигнальной линии дорожной разметки или бордюра, и получения оптимальных параметров a, b c. Модуль 34 извлечения прямых линий получает сумму расстояний между оцененной прямой линией и соответствующими точками, используемыми для оценки, и когда сумма равна или выше предварительно определенного порогового значения, не извлекает оцененную прямую линию в качестве фрагмента информации прямых линий. Когда сумма меньше порогового значения, модуль 34 извлечения прямых линий получает точки на прямой линии, ближайшие к соответствующим точкам, используемым для оценки, выбирает две из полученных точек, между которыми расстояние является наибольшим, в качестве конечных точек и извлекает выбранные две точки в качестве конечных точек фрагмента информации прямых линий. Точки 71a и 71d извлекаются в качестве конечных точек фрагмента информации N1 прямых линий, точки 72a и 72d извлекаются в качестве конечных точек фрагмента информации N2 прямых линий, и точки 73a и 73d извлекаются в качестве конечных точек фрагмента информации N3 прямых линий. Модуль 33 накопления позиций ориентиров накапливает облако точек (данные позиций ориентиров), используемое для оценки прямой линии, фрагменты информации прямых линий и полученное время t0+Δt в ассоциации друг с другом.
[0034] На этапе S40 модуль 35 выбора позиций ориентиров считывает конечные точки фрагментов информации прямых линий, накопленной в модуле 33 накопления позиций ориентиров, и получает углы в 90° или меньше, сформированные посредством прямых линий, которые проходят мимо конечных точек фрагментов информации прямых линий и которые представляют собой проведенные линии фрагментов информации прямых линий. Поскольку каждый фрагмент информации прямых линий накапливается в качестве двух конечных точек в модуле 33 накопления позиций ориентиров, когда две конечные точки выражаются как ps=(xs, ys), pe (xe, ye), вектор направления фрагмента информации прямых линий может выражаться как V=(xe-xs, ye-ys).
[0035] Кроме того, когда векторы направления определенных двух фрагментов прямой информации выражаются как Vi и Vj, угол argij в 90° или меньше, сформированный посредством проведенных линий двух фрагментов информации прямых линий, может получаться следующим образом:
aijcos-1 ((Vi*Vj)/(|Vi||Vj|))
(когда aij превышает 90 градусов), argij=180-aij
(когда aij 90 составляет градусов или меньше), argij=aij.
[0036] Модуль 35 выбора позиций ориентиров задает приоритеты фрагментов информации прямых линий таким образом, что комбинациям прямых линий, формирующих углы arg, присваивается высокий приоритет в порядке убывания сформированного угла. Когда приоритеты фрагментов информации прямых линий на основе углов являются идентичными, модуль 35 выбора позиций ориентиров может задавать высокий приоритет для каждого фрагмента информации прямых линий в порядке по убыванию времени получения соответствующего фрагмента данных позиций ориентиров.
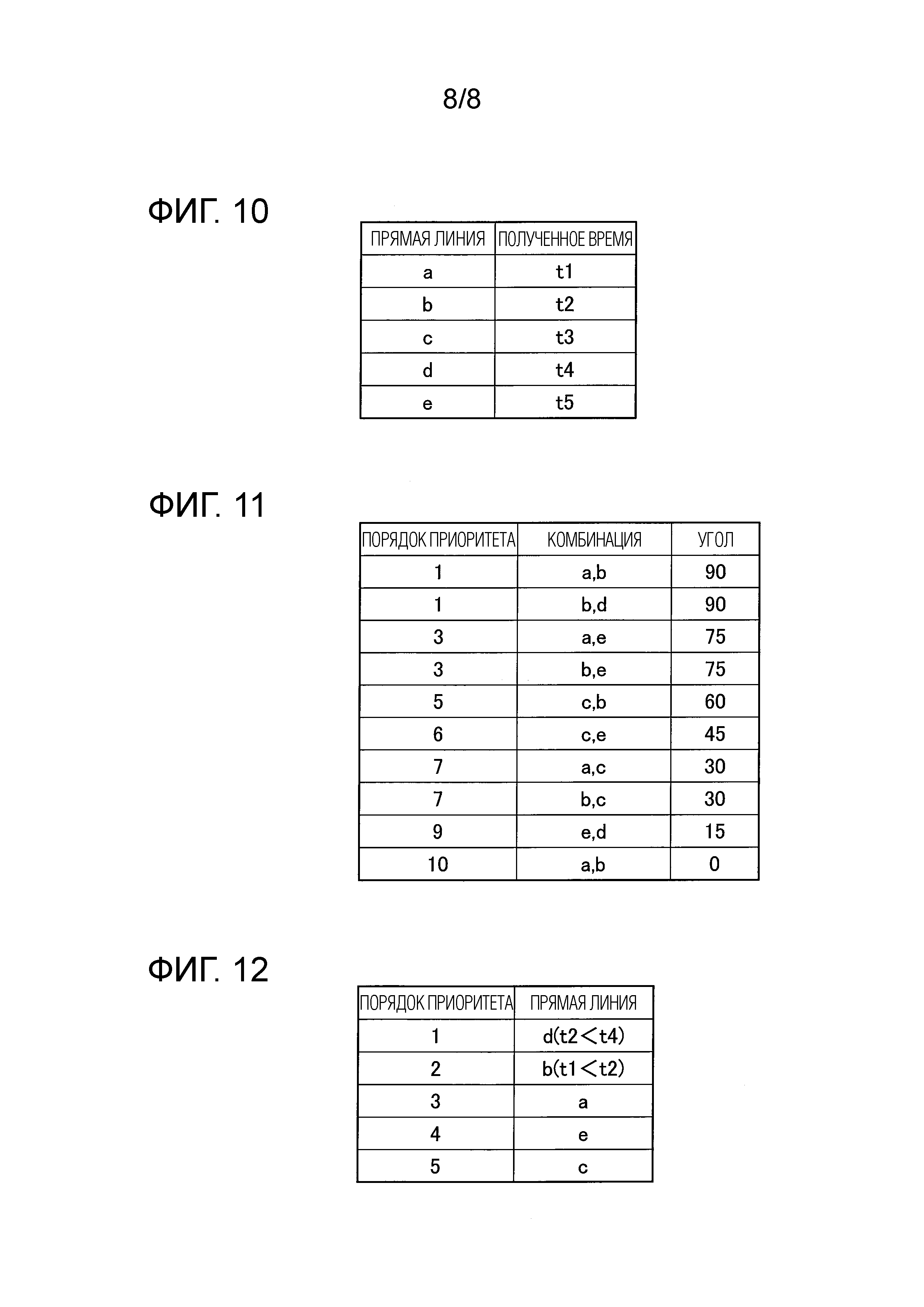
[0037] Фиг. 9 является схемой, поясняющей случай, в котором пять фрагментов информации a-e прямых линий извлекаются посредством модуля 34 извлечения прямых линий в то время, когда транспортное средство V движется. Как проиллюстрировано на фиг. 10, фрагменты информации a, b, c, d и e прямых линий получаются во время t1, t2, t3, t4 и t5, соответственно. Время t1 является самым ранним временем, и время t5 является последним временем. В этом случае, как проиллюстрировано на фиг. 11, модуль 35 выбора позиций ориентиров сначала получает комбинации фрагментов информации a-e прямых линий и углов в 90° или меньше, сформированных посредством проведенных линий комбинаций фрагментов информации a-e прямых линий, и задает приоритеты для комбинаций таким образом, что комбинациям прямых линий, формирующих углы в 90° или меньше, присваивается высокий приоритет в порядке убывания сформированного угла. Приоритеты соответствующих комбинаций фрагментов информации a-e прямых линий за счет этого определяются так, как проиллюстрировано на фиг. 11.
[0038] В состоянии, проиллюстрированном на фиг. 11, приоритет задается для каждой комбинации фрагментов информации прямых линий. Модуль 35 выбора позиций ориентиров в силу этого дополнительно задает приоритет каждого фрагмента информации прямых линий таким образом, что высокий приоритет задается для каждого фрагмента прямой информации в порядке убывания времени получения фрагмента информации прямых линий или фрагмента данных позиций ориентиров. Например, времена получения фрагментов информации a, b, d прямых линий, которые задаются с возможностью иметь наивысший приоритет на фиг. 11 t1, t2, t4, соответственно, на фиг. 10, и время получения фрагмента информации d прямых линий в силу этого является последним, после которого следует b и a. Следовательно, приоритет фрагмента информации d прямых линий задается наибольшим, после которого следует b и a, как проиллюстрировано на фиг. 12. Кроме того, приоритеты фрагментов информации c и e прямых линий, которые задаются в качестве вторых наибольших, после приоритетов фрагментов информации a, b, d прямых линий на фиг. 11, определяются таким образом, что приоритет фрагмента информации e прямых линий выше c.
[0039] На этапе S50 модуль 33 накопления позиций ориентиров сохраняет фрагменты информации прямых линий и фрагменты данных позиций ориентиров в ассоциации, согласно приоритетам, заданным на этапе S40. Когда емкость хранения модуля 33 накопления позиций ориентиров ограничена, модуль 33 накопления позиций ориентиров может удалять фрагменты информации прямых линий в порядке по возрастанию приоритета.
[0040] На этапе S60 модуль 36 оценки собственной позиции сопоставляет фрагменты данных позиций ориентиров, накопленные в модуле 33 накопления позиций ориентиров, и позиции ориентиров в картографической информации 41, чтобы оценивать позицию транспортного средства V. В частности, модуль 36 оценки собственной позиции оценивает позицию и угол ориентации транспортного средства V всего с тремя степенями свободы, которые включают в себя позицию (координату X) транспортного средства V в направлении восток-запад, позицию (координату Y) транспортного средства V в направлении север-юг и азимутальный угол θ (угол относительно вертикальной оси θ) транспортного средства V.
[0041] Алгоритм на основе ICP (интерактивных ближайших точек) может использоваться для сопоставления, выполняемого на этапе S50. В этом случае модуль 36 оценки собственной позиции выполняет сопоставление, например, для линий со штриховкой, из позиций ориентиров, включенных в картографическую информацию 41, посредством использования конечных точек на обоих концах каждой линии со штриховкой в качестве точек оценки. Кроме того, чем ближе фрагмент данных позиций ориентиров к транспортному средству V (группе 1 периферийных датчиков), тем меньше эффект ошибки одометрии. Соответственно, модуль 36 оценки собственной позиции может увеличивать число точек оценки для областей около транспортного средства V посредством выполнения линейной интерполяции и сокращать число точек оценки для областей, дальних от транспортного средства V.
[0042] Как описано выше, устройство оценки собственной позиции согласно варианту осуществления извлекает фрагменты информации прямых линий посредством использования фрагментов данных позиций ориентиров и выбирает фрагменты данных позиций ориентиров, необходимых для уникальной оценки собственной позиции, на основе углов, сформированных посредством проведенных линий извлеченных фрагментов информации прямых линий. Устройство оценки собственной позиции согласно варианту осуществления в силу этого может повышать точность оценки собственной позиции транспортного средства. Кроме того, поскольку устройство оценки собственной позиции согласно варианту осуществления извлекает фрагменты информации прямых линий на основе ориентиров вокруг транспортного средства и извлекает по меньшей мере одну комбинацию извлеченных фрагментов информации прямых линий, проведенные линии которых пересекают друг друга, устройство оценки собственной позиции может уникально оценивать собственную позицию.
[0043] Кроме того, устройство оценки собственной позиции согласно варианту осуществления может выполнять оценку собственной позиции посредством использования фрагментов данных позиций ориентиров, соответствующих фрагментам информации прямых линий относительно комбинации пересекающихся прямых линий, формирующих наибольший угол из углов в 90° или меньше, сформированных посредством комбинаций пересекающихся прямых линий. Устройство оценки собственной позиции согласно варианту осуществления в силу этого может выбирать самый надежный фрагмент данных из фрагментов данных позиций ориентиров, необходимых для уникальной оценки собственной позиции.
[0044] Кроме того, устройство оценки собственной позиции согласно варианту осуществления задает приоритеты фрагментов информации прямых линий таким образом, что комбинациям прямых линий, формирующих углы в 90° или меньше, присваивается высокий приоритет в порядке убывания сформированного угла. Приоритеты в силу этого задаются для фрагментов данных позиций ориентиров в порядке по убыванию применимости в оценке собственной позиции, и может повышаться точность оценки собственной позиции транспортного средства.
[0045] Кроме того, устройство оценки собственной позиции согласно варианту осуществления задает высокий приоритет для каждого фрагмента информации прямых линий в порядке убывания времени получения соответствующего фрагмента данных позиций ориентиров. Устройство оценки собственной позиции согласно варианту осуществления в силу этого может выбирать недавний фрагмент данных позиций ориентиров, который существенно способствует оценке собственной позиции, и повышать точность оценки собственной позиции транспортного средства.
[0046] Кроме того, в устройстве оценки собственной позиции согласно варианту осуществления модуль 33 накопления позиций ориентиров определяет фрагменты данных позиций ориентиров, которые должны накапливаться, на основе заданных приоритетов. Устройство оценки собственной позиции согласно варианту осуществления в силу этого может удалять фрагменты данных с низкими приоритетами, когда удаление данных становится необходимым вследствие таких причин, как ограниченная емкость хранения. Соответственно, устройство оценки собственной позиции согласно варианту осуществления может продолжать хранить фрагменты данных позиций ориентиров, необходимые для того, чтобы уникально оценивать собственную позицию.
[0047] Хотя настоящее изобретение описано выше посредством использования вышеуказанного варианта осуществления, не следует понимать, что описание и чертежи, составляющие часть этого раскрытия сущности, ограничивают настоящее изобретение. Из этого раскрытия сущности, различные альтернативные варианты осуществления, примеры и рабочие технологии должны выявляться специалистами в данной области техники. Настоящее изобретение включает в себя различные варианты осуществления и т.п., которые не описываются в данном документе, к примеру, конфигурации, взаимно приспосабливающие вышеуказанные конфигурации, как и следовало ожидать. Соответственно, объем настоящего изобретения должен определяться только посредством предметов, задающих изобретение в пределах объема формулы изобретения, считающегося надлежащим на основе описания.
Промышленная применимость
[0048] Настоящее изобретение может предоставлять устройство оценки собственной позиции и способ оценки собственной позиции, которые позволяют повышать точность оценки собственной позиции посредством выбора фрагментов данных, используемых для оценки собственной позиции, на основе углов, сформированных посредством прямых линий, полученных посредством использования ориентиров в периферии.
Список номеров ссылок
[0049] V - транспортное средство
4 - устройство хранения данных (устройство хранения картографической информации)
31 - детектор позиций ориентиров
32 - детектор величины перемещения
33 - модуль накопления позиций ориентиров
34 - модуль извлечения прямых линий
35 - модуль выбора позиций ориентиров
36 - модуль оценки собственной позиции
41 - картографическая информация
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство оценки положения транспортного средства и способ оценки положения транспортного средства

