Результат интеллектуальной деятельности: СПОСОБ ТАРИРОВКИ ДАТЧИКА МИКРОУСКОРЕНИЙ В УСЛОВИЯХ КОСМИЧЕСКОГО ПОЛЕТА
Вид РИД
Изобретение
Изобретение относится к космической технике и может быть использовано при тарировке датчика микроускорений на космическом аппарате (КА) в условиях космического полета.
Для измерения ускорений используются специальные датчики и приборы - акселерометры. В процессе их использования вследствие различных причин происходит ухудшение точности измерений и появляется необходимость установления величины погрешности прибора, т.е. его тарировка. Такая задача возникает и перед началом использования прибора.
Известен способ тарировки датчиков ускорений - акселерометров, реализуемый устройством для создания нормированных ускорений при поверке акселерометров (патент РФ RU 2393488 С1, 27.06.2010 Бюл. №18). Данный способ обеспечивает выполнение тарировки датчиков и позволяет исключить волновые процессы и получить необходимый закон изменения ускорения. Недостатком данного способа является то, что он не в полной мере обеспечивает выполнение тарировки датчиков в диапазоне ускорений, возникающих на КА в условиях космического полета.
Известен способ тарировки датчика микроускорений, основанный на сопоставлении измерений с калиброванными значениями и определении погрешностей в измерениях датчика микроускорений (патент США US 3779065 А, 18.12.1973). В данном способе тарировка датчиков осуществляется путем воздействия на датчик бойком с последующим измерением воздействия и фиксированием показаний датчика.
На КА в штатных условиях космического полета возникают обычно малые ускорения, значение которых не превышает 10-3 g, где g=9,8 м/с2 (М.Ю. Беляев. «Научные эксперименты на космических кораблях и орбитальных станциях», М.: «Машиностроение», 1984). Точное измерение таких ускорений является весьма сложной технической задачей и для ее решения используются различные датчики микроускорений (Д.М. Климов, В.И. Полежаев, М.Ю. Беляев, А.И. Иванов, С.Б. Рябуха, В.В. Сазонов. «Проблемы и перспективы использования невесомости в экспериментах на орбитальных станциях». РКТ, серия 12, выпуск 1-2, 2011). В процессе полета возникают неизбежные погрешности в показаниях используемых датчиков и появляется необходимость выполнения их тарировки.
Известен способ тарировки датчика микроускорений в космическом полете (патент РФ RU 2583882 С1, 10.05.2016 Бюл. №13 - прототип), согласно которому фиксируют в связанной с КА системе координат вектор, определяющий положение датчика микроускорений, измеряют угловую скорость КА и его угловое ускорение, определяют угловое положение и орбиту КА, по изменению орбиты КА и определенному его угловому положению оценивают плотность атмосферы на высоте полета КА и ускорение его торможения, по предложенной формуле определяют калиброванное значение микроускорения и погрешность в измерениях датчика микроускорений определяют в результате сопоставления измеренного датчиком значения с упомянутым калиброванным значением микроускорения. Способ-прототип обеспечивает возможность тарировка датчика микроускорений в требуемом диапазоне ускорений малой величины, характерных для условий космического полета.
К недостаткам способа-прототипа относится то, что для тарировки необходимо включить в программу полета КА специальные полетные операции - дополнительные по отношению с штатной программе полета КА, - в ходе которых требуемым образом изменяются угловые скорость и ускорение КА, при этом необходимо выполнить высокоточное измерение требуемых параметров, включая текущие угловые скорость и ускорение КА, текущее угловое положение КА относительно орбитальной системы координат, текущее значение баллистического коэффициента КА, текущее значение плотности атмосферы на высоте полета КА и т.д.
Возможность выполнения необходимых бортовых измерений определяется составом и техническими характеристиками бортовой измерительной аппаратуры КА, поэтому для использования способа-прототипа необходимо наличие на КА соответствующей измерительной аппаратуры.
Таким образом, реализация способа-прототипа требует определенных затрат (финансовых, ресурсных, организационных, управленческих), связанных с обеспечением КА необходимым составом высокоточной измерительной аппаратуры и включением в программу полета КА специальных полетных операций тарировки.
Задачей, на решение которой направлено настоящее изобретение, является выполнение тарировки размещенного на КА датчика микроускорений в условиях штатного космического полета.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в снижении затрат на выполнение тарировки (повышении эффективности выполнения тарировки) датчика микроускорений в полете за счет обеспечения возможности тарировки датчика микроускорений при реализации штатных полетных операций коррекции орбиты КА.
Технический результат достигается тем, что в способе тарировки датчика микроускорений в условиях космического полета, включающем воздействие заданной величины на датчик микроускорений, запоминание показаний датчика и сравнение расчетных данных и данных, полученных по показаниям датчика, дополнительно воздействие на жесткозакрепленный на КА датчик микроускорений выполняют путем приложения к КА калибровочного импульса посредством включения двигательной установки КА, до и после интервала приложения калибровочного импульса измеряют параметры орбиты КА, по изменению параметров орбиты КА определяют фактическое значение приложенного к КА импульса, по показаниям датчика определяют значения микроускорений на интервале приложения калибровочного импульса, производят сравнение величины импульса, определенной по показаниям датчика на интервале приложения калибровочного импульса, с фактическим значением приложенного калибровочного импульса, определенным по изменению параметров орбиты КА, и по результатам данного сравнения осуществляют тарировку датчика.
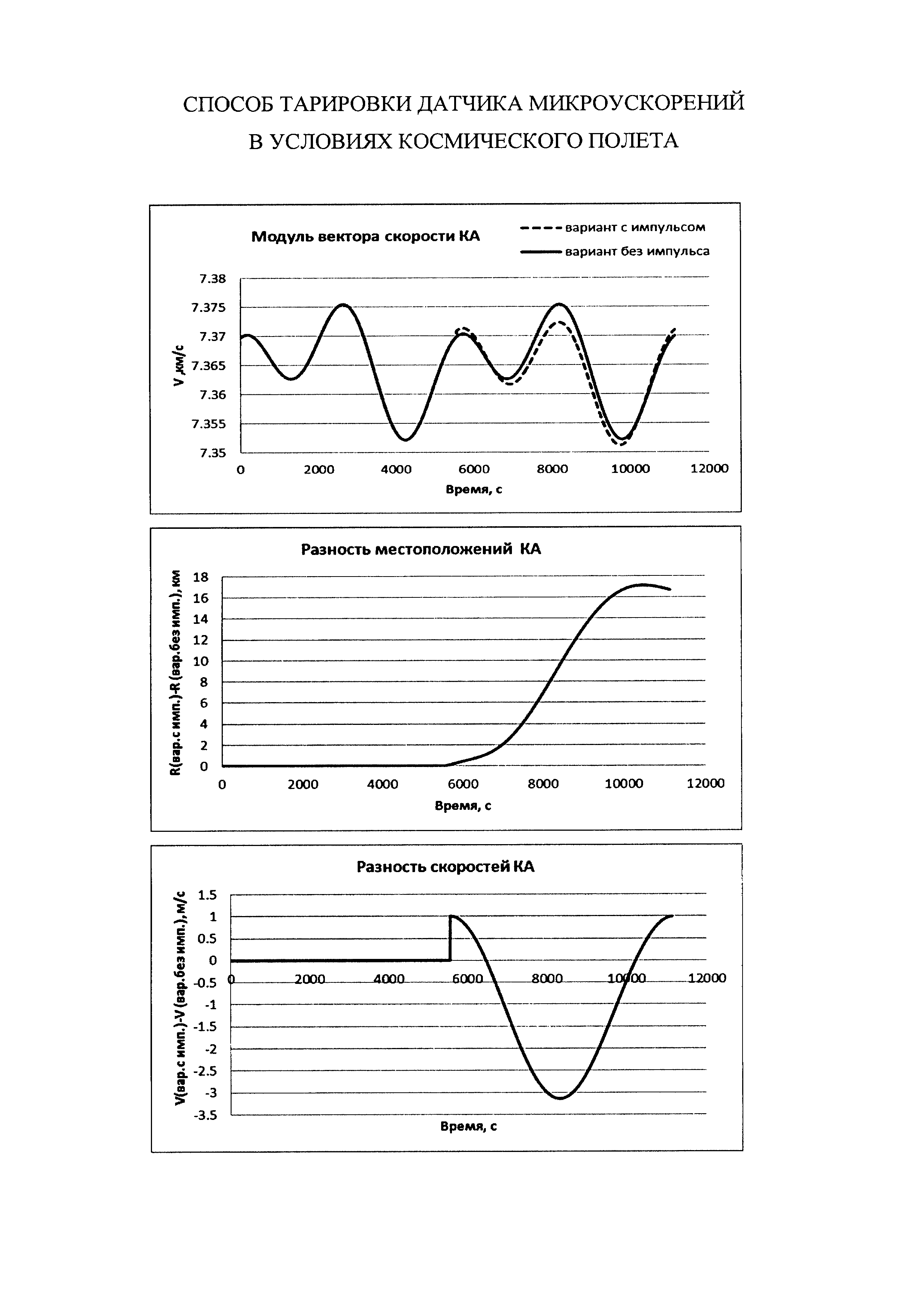
Изобретение поясняется иллюстрацией, на которой представлены графики, отображающие данные по орбите МКС на двух последовательных витках для двух вариантов орбиты: вариант 1 - с выдачей между первым и вторым витками импульса коррекции орбиты, вариант 2 - без импульса.
Поясним предложенные в способе действия.
Как правило установленные на КА датчики микроускорений жесткозакреплены на корпусе КА. Например, на международной космической станции (МКС) размещенные на ней датчики микроускорений ИМУ, ИМУ-Ц, MAMS, SAMS являются стационарными, т.е. жестко закрепляются на различных модулях российского и американского сегментов МКС. Для выполнения тарировки переносного датчика микроускорений он предварительно жестко закрепляется на корпусе КА.
В полете КА его орбита формируется путем выполнения маневров КА. Например, программа маневров такого КА как МКС составляется исходя из требований обеспечения функционирования МКС - запуска и возвращения экипажей, приема грузовых кораблей, уклонения от осколков, поддержания высоты орбиты в требуемом диапазоне значений и т.д. Дальнейшие действия способа осуществляются на фоне выполнения штатной полетной операции коррекции орбиты КА.
Выполнение полетной операции коррекции орбиты КА осуществляется посредством включения двигательной установки КА, в результате чего к КА прикладывается необходимый расчетный импульс. В приложении к решаемой задаче тарировки любой приложенный к КА импульс рассматриваем как калибровочный. Поскольку датчик микроускорений жесткозакреплен на корпусе КА, то данный калибровочный импульс воздействует на указанный датчик.
До и после интервала приложения калибровочного импульса измеряют параметры орбиты КА.
По изменению параметров орбиты КА определяют фактическое значение приложенного к КА импульса.
По показаниям датчика определяют значения микроускорений на интервале приложения калибровочного импульса.
Производят сравнение величины импульса, определенной по показаниям датчика на интервале приложения калибровочного импульса, с фактическим значением приложенного калибровочного импульса, определенным по изменению параметров орбиты КА. По результатам данного сравнения осуществляют тарировку датчика. Например, сопоставление полученного значения калибровочного импульса с величиной импульса, определенной по показаниям датчика, позволяет определить погрешность в измерениях датчика путем расчета поправочного коэффициента, равного отношению величины импульса, определенной по показаниям датчика на интервале приложения калибровочного импульса, с фактическим значением приложенного калибровочного импульса, определенным по изменению параметров орбиты КА.
В качестве примера рассмотрим возможность применения предложенного способа для тарировки датчика микроускорений на КА типа МКС.
Для обеспечения функционирования МКС (запуска и возвращения экипажей, приема грузовых кораблей, уклонения от осколков и т.д.) и поддержание необходимой высоты полета МКС регулярно выполняются коррекции орбиты (маневры) МКС. Маневры МКС всегда выполняются на подъем орбиты и реализуются средствами служебного модуля или средствами пристыкованных к станции транспортных грузовых кораблей (ТГК) «Прогресс», при этом величина импульса маневра выбирается, как правило, в пределах от 0,3 до 1, 5 м/сек при продолжительности импульса от десятков до сотен секунд (в зависимости от величины импульса и средств его реализации). Например, при высоте орбиты МКС порядка 400 км импульс маневра МКС ΔVимп≈0.6 м/с обеспечивает подъем (увеличение высоты) орбиты на величину ΔН≈1,1 км; импульс маневра МКС ΔVимп≈1.3 м/с обеспечивает подъем орбиты на величину ΔН≈2,3 км.
При выполнении импульса на МКС возникают ускорения от 10-3 g (10-2 м/с2) до 10-2g (0,1 м/с2), g=9,8 м/с2, которые должны находиться в зоне чувствительности тарируемого датчика. Отметим, что данный уровень ускорений доступен измерению такими используемыми на МКС датчиками микроускорений как ИМУ, ИМУ-Ц, MAMS, SAMS. По показаниям тарируемого датчика микроускорений рассчитывается расчетная величина импульса ΔVрасч.датч, определяемая по показаниям датчика микроускорений на интервале приложения импульса.
Измерение параметров орбиты МКС, выполняемое с использованием имеющихся штатных навигационных средств (средств радиоконтроля орбиты и средств навигационных спутниковых систем GPS и ГЛОНАСС), позволяет определить местоположение МКС с точностью до единиц метров. По измерениям местоположения МКС на витках до и после выдачи импульса коррекции орбиты определяется скорость МКС перед моментом начала выдачи импульса маневра и скорость МКС после окончания выдачи импульса маневра, по которым определяется фактическое приращение скорости МКС за интервал времени импульса маневра ΔVфакт.имп с точностью 10-3 м/с.
В качестве иллюстрации приведен пример данных по орбите МКС на двух последовательных витках для двух вариантов орбиты: вариант 1 - с выдачей между первым и вторым витками импульса коррекции орбиты ΔVимп=1 м/с и вариант 2 - без импульса.
На верхнем графике представлены значения модуля вектора скорости МКС: сплошной линией показан график вектора скорости орбиты без выдачи импульса, пунктирной линией - орбиты с выдачей импульса.
На среднем и нижнем графиках представлены разность местоположений МКС и разность скоростей КА между указанными вариантами орбиты.
Представленные на графиках данные показывают, что величине импульса ΔVимп=1 м/с соответствует величина разности между местоположениями МКС при варианте орбиты с выдачей импульса и варианте орбиты без импульса, полученная на момент через виток после выдачи импульса, равная ≈17 км.
Используя данное соответствие можно получить вышеуказанную оценку точности определения ΔVфакт.имп: при величине точности определения местоположения МКС 10÷20 м на интервале времени, охватывающем виток до и виток после выдачи импульса коррекции орбиты, точность оценки/определения фактической величины импульса ΔVфакт.имп составляет 10-3 м/с.
При использовании полученной фактической величины импульса ΔVфакт.имп для тарировки датчика микроускорений необходимо, чтобы указанная точность определения ΔVфакт.имп соответствовала точности определения расчетной величины импульса ΔVрасч.датч, определяемой по показаниям датчика микроускорений на интервале приложения импульса, точность определения которой определяется чувствительностью датчика (минимальным измеримым изменением показаний датчика, отнесенным к единице измеряемой датчиком величины), умноженной на продолжительность импульса. Так, вышеуказанной оценке значения точности определения ΔVфакт.имп 10-3 м/с соответствует чувствительность датчика порядка 10-5g (10-4 м/с2) (например, данный уровень чувствительности имеют используемые на МКС датчики микроускорений MAMS, SAMS).
Полученная расчетная величина импульса ΔVрасч.датч, определенная по показаниям датчика на интервале приложения импульса, сопоставляется с полученным фактическим значением приложенного калибровочного импульса ΔVфакт.имп, определенным по изменению параметров орбиты КА. По результатам данного сопоставления осуществляется тарировка датчика - например, рассчитывается поправочный коэффициент к измерениям (показаниям) датчика, равный отношению ΔVрасч.датч к ΔVфакт.имп.
Отметим, что данная методика тарировки применима к датчикам, предназначенным в первую очередь для измерений квазипостоянных значений микроускорений - микроускорений, обусловленых вращением КА вокруг центра масс, неоднородностью гравитационного поля в пределах конструкции КА и действием на КА сопротивления атмосферы (М.Ю. Беляев. «Научные эксперименты на космических кораблях и орбитальных станциях», М.: «Машиностроение», 1984; Д.М. Климов, В.И. Полежаев, М.Ю. Беляев, А.И. Иванов, С.Б. Рябуха, В.В. Сазонов. «Проблемы и перспективы использования невесомости в экспериментах на орбитальных станциях». РКТ, серия 12, выпуск 1-2, 2011).
Опишем технический эффект предлагаемого изобретения.
За счет выполнения предлагаемых действий возможна тарировка датчика микроускорений на КА в условиях космического полета. В отличие от способа-прототипа, в котором тарировка датчика осуществляется с помощью создания на КА калиброванных значений микроускорений малой величины, в предлагаемом способе тарировка датчика осуществляется по калибровочному импульсу (интегралу ускорений по времени), при этом для создания на КА необходимого калибровочного импульса используется штатная полетная операция по выполнению коррекции орбиты КА. Измеряя и отслеживая изменения параметров орбиты КА, определяют фактическое значение приложенного к КА импульса, который в применении к решаемой задаче тарировки рассматривается как калибровочный. Сопоставление полученного значения калибровочного импульса с величиной импульса, определенной по показаниям датчика, позволяет осуществить тарировку датчика.
Таким образом, предлагаемое техническое решение позволяет снизить затраты на выполнение тарировки (повысить эффективность выполнения тарировки) датчика микроускорений в полете за счет обеспечения возможности тарировки датчика микроускорений при реализации штатных полетных операций коррекции орбиты КА (т.е. за счет использования для выполнения тарировки датчика микроускорений штатных полетных операций коррекции орбиты КА). В частности, предлагаемое техническое решение позволяет выполнить тарировку размещенного на КА датчика микроускорений в условиях космического полета без требования наличия на КА высокоточной измерительной аппаратуры для высокоточного измерения углового движения КА.
В настоящее время технически все готово для реализации предложенного способа, например, на таких КА как МКС, транспортный грузовой корабль «Прогресс» и др. Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено с использованием существующих технических средств. Система управления КА штатно позволяет осуществлять построение необходимой ориентации для выполнения маневров, а двигательная установка КА обеспечивает выдачу необходимых расчетных импульсов, корректирующих орбиту КА. Измерение параметров орбиты КА может быть выполнено с использованием существующих штатных навигационных средств - средств радиоконтроля орбиты и навигационных спутниковых систем GPS и ГЛОНАСС. Необходимые вычисления могут быть выполнены с использованием бортовых вычислительных средств КА.
Способ тарировки датчика микроускорений в условиях космического полета, включающий воздействие заданной величины на датчик микроускорений, запоминание показаний датчика и сравнение расчетных данных и данных, полученных по показаниям датчика, отличающийся тем, что дополнительно воздействие на жесткозакрепленный на космическом аппарате датчик микроускорений выполняют путем приложения к космическому аппарату калибровочного импульса посредством включения двигательной установки космического аппарата, до и после интервала приложения калибровочного импульса измеряют параметры орбиты космического аппарата, по изменению параметров орбиты космического аппарата определяют фактическое значение приложенного к космическому аппарату импульса, по показаниям датчика определяют значения микроускорений на интервале приложения импульса, производят сравнение величины импульса, определенной по показаниям датчика на интервале приложения импульса, с фактическим значением приложенного импульса, определенным по изменению параметров орбиты космического аппарата, и по результатам данного сравнения осуществляют тарировку датчика.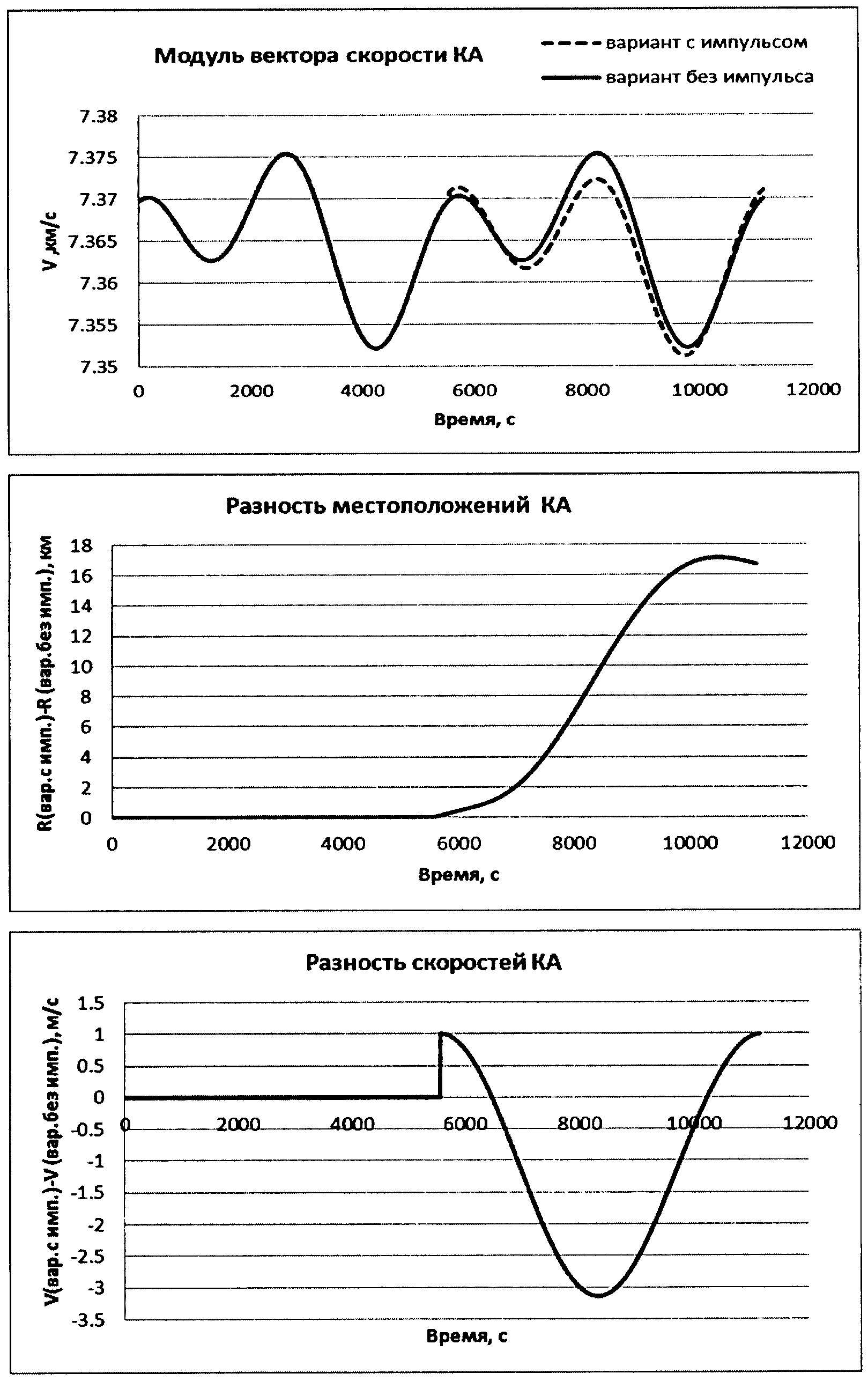
Система коммутации исполнительных органов и способ неразрушающего контроля работоспособности и разобщённости элементов коммутации и исполнительных органов
Способ управления движением космического объекта при сближении с другим космическим объектом
Периферийный стыковочный механизм
Способ воздушного термостатирования отсеков космического аппарата при наземных испытаниях и устройство для его осуществления
Электрохимический компрессор водорода
Способ определения работоспособности пиротехнических изделий при тепловом воздействии
Способ преобразования энергии при энергоснабжении космического аппарата
Способ определения плотности атмосферы на высоте полета космического аппарата
Способ контроля системы энергопитания снабженного солнечными батареями космического аппарата
Устройство контроля ориентации космических аппаратов при сближении
Способ управления спуском космического аппарата при проведении наблюдений
Способ одноосной ориентации космического аппарата вытянутой формы
Способ одноосной ориентации космического аппарата вытянутой формы
Способ одноосной ориентации космического аппарата вытянутой формы
Способ определения положения объекта преимущественно относительно космического аппарата и система для его осуществления
Способ контроля нештатных ситуаций на пилотируемом космическом аппарате и система для его осуществления
Способ контроля передвижения космонавта относительно космического аппарата и система для его осуществления
Способ определения момента времени схода наблюдаемого с космического аппарата ледника
Способ контроля готовности экипажа космического аппарата к нештатным ситуациям и система для его осуществления
Способ определения деформации корпуса космического аппарата в полете

