Результат интеллектуальной деятельности: УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ И СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству помощи при парковке и к способу помощи при парковке, которые помогают при операции парковки, при которой транспортное средство перпендикулярно паркуется в области для парковки.
Уровень техники
[0002] Известно устройство помощи при парковке, выполненное с возможностью помогать при операции парковки, при которой транспортное средство паркуется посредством движения задним ходом из начальной позиции для движения задним ходом к целевой позиции для парковки (см. патентный документ 1). В патентном документе 1, помощь при парковке выполняется при объезде объезжаемых точек, заданных около целевой позиции для парковки.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2011-001029
Сущность изобретения
Техническая задача
[0004] Тем не менее, устройство помощи при парковке, описанное в патентном документе 1, фокусируется только на предотвращении столкновения на маршруте, по которому транспортное средство движется задним ходом из начальной позиции для движения задним ходом к целевой позиции для парковки. Соответственно, когда ширина проезда для транспортного средства, к которому обращена область для парковки, является небольшой, транспортное средство будет пересекаться с помехой в начальной позиции для движения задним ходом. Таким образом, помощь при парковке может выполняться только в ограниченных ситуациях.
[0005] Настоящее изобретение осуществлено с учетом проблемы, описанной выше, и его цель заключается в том, чтобы предоставлять устройство помощи при парковке и способ помощи при парковке, которые позволяют формировать маршрут, на котором транспортное средство не будет пересекаться с помехой около проезда для транспортного средства также в окружении, в котором ширина проезда для транспортного средства является небольшой.
Решение задачи
[0006] Устройство помощи при парковке согласно одному аспекту настоящего изобретения формирует маршрут, по которому транспортное средство должно двигаться в область для парковки через позицию, в которой направление движения меняется на противоположное. Устройство помощи при парковке ищет углы ориентации транспортного средства в позиции, в которой направление движения меняется на противоположное, на основе ширины проезда для транспортного средства, чтобы обеспечивать формирование маршрута, на котором передний участок транспортного средства не будет пересекаться в позиции, в которой направление движения меняется на противоположное, с помехой рядом с проездом для транспортного средства в направлении ширины.
Преимущества изобретения
[0007] Согласно одному аспекту настоящего изобретения, маршрут, на котором транспортное средство не будет пересекаться с помехой около проезда для транспортного средства, может формироваться также в окружении, в котором ширина проезда для транспортного средства является небольшой, посредством поиска углов ориентации транспортного средства в позиции, в которой направление движения меняется на противоположное, на основе ширины проезда для транспортного средства.
Краткое описание чертежей
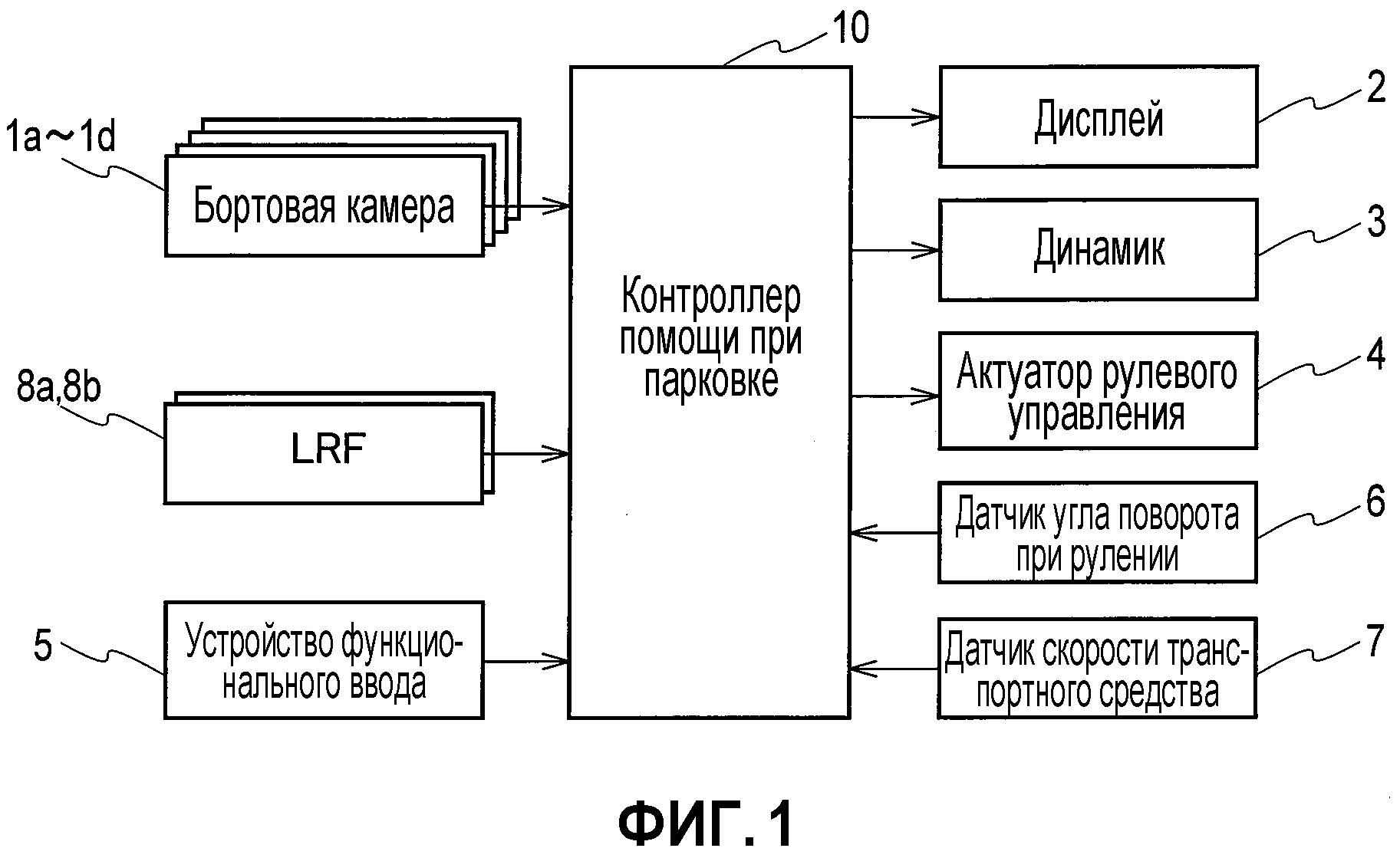
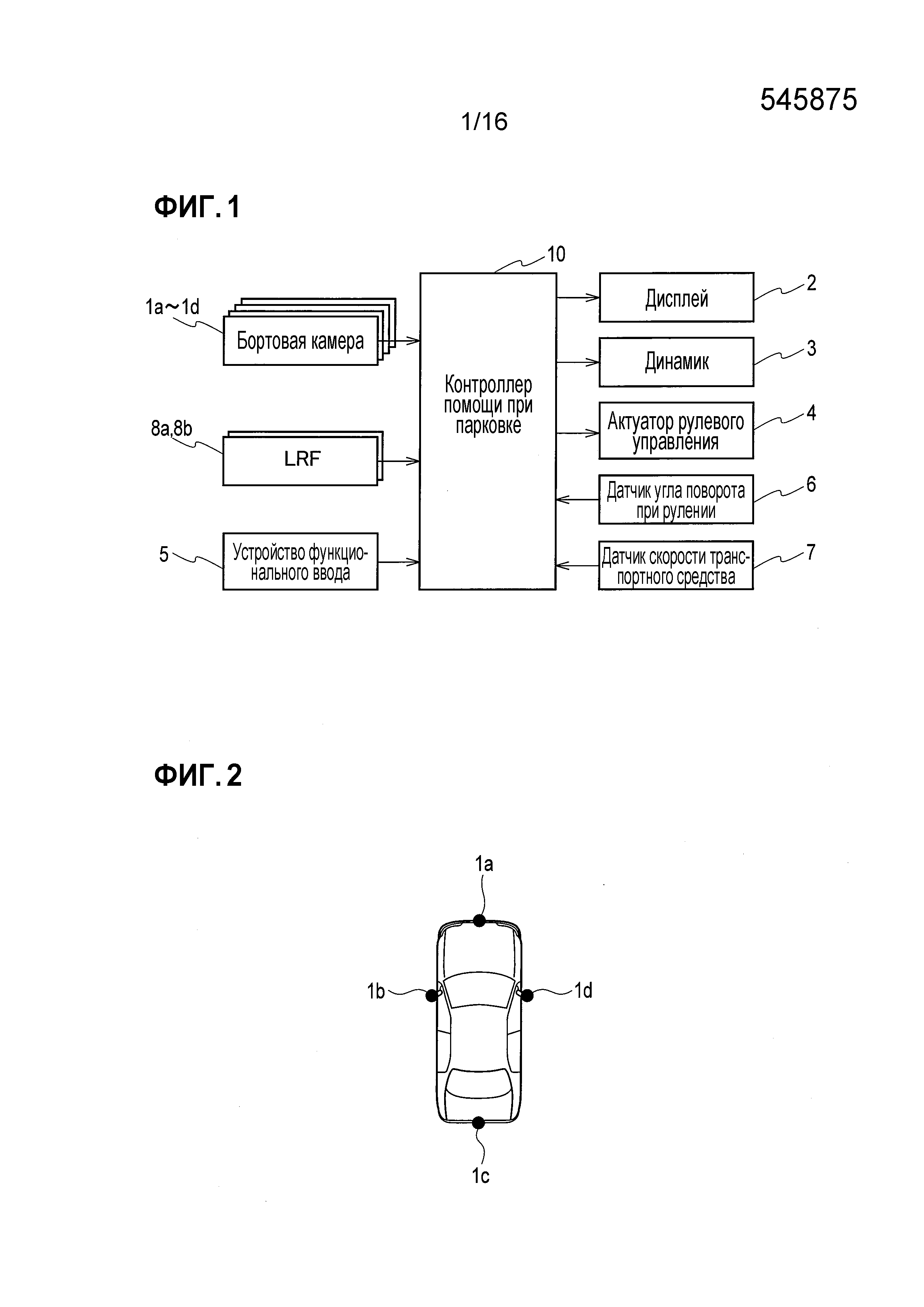
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства помощи при парковке согласно первому варианту осуществления.
Фиг. 2 является видом сверху, иллюстрирующим пример того, как бортовые камеры 1a-1d монтируются в транспортном средстве.
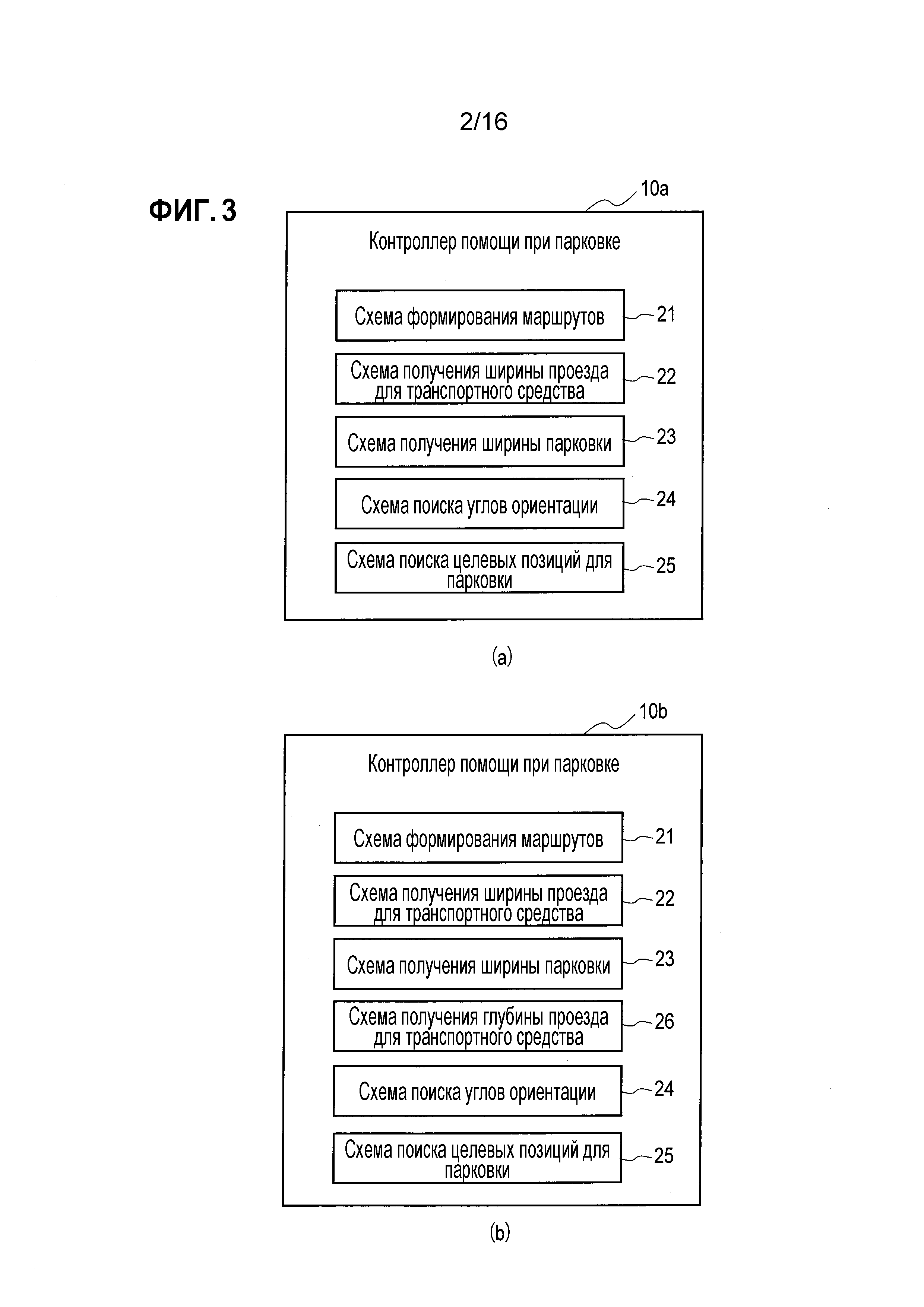
Часть (a) по фиг. 3 является блок-схемой, иллюстрирующей несколько схем обработки информации, реализованных посредством контроллера 10a помощи при парковке согласно первому варианту осуществления, и часть (b) по фиг. 3 является блок-схемой, иллюстрирующей несколько схем обработки информации, реализованных посредством контроллера 10b помощи при парковке согласно второму варианту осуществления.
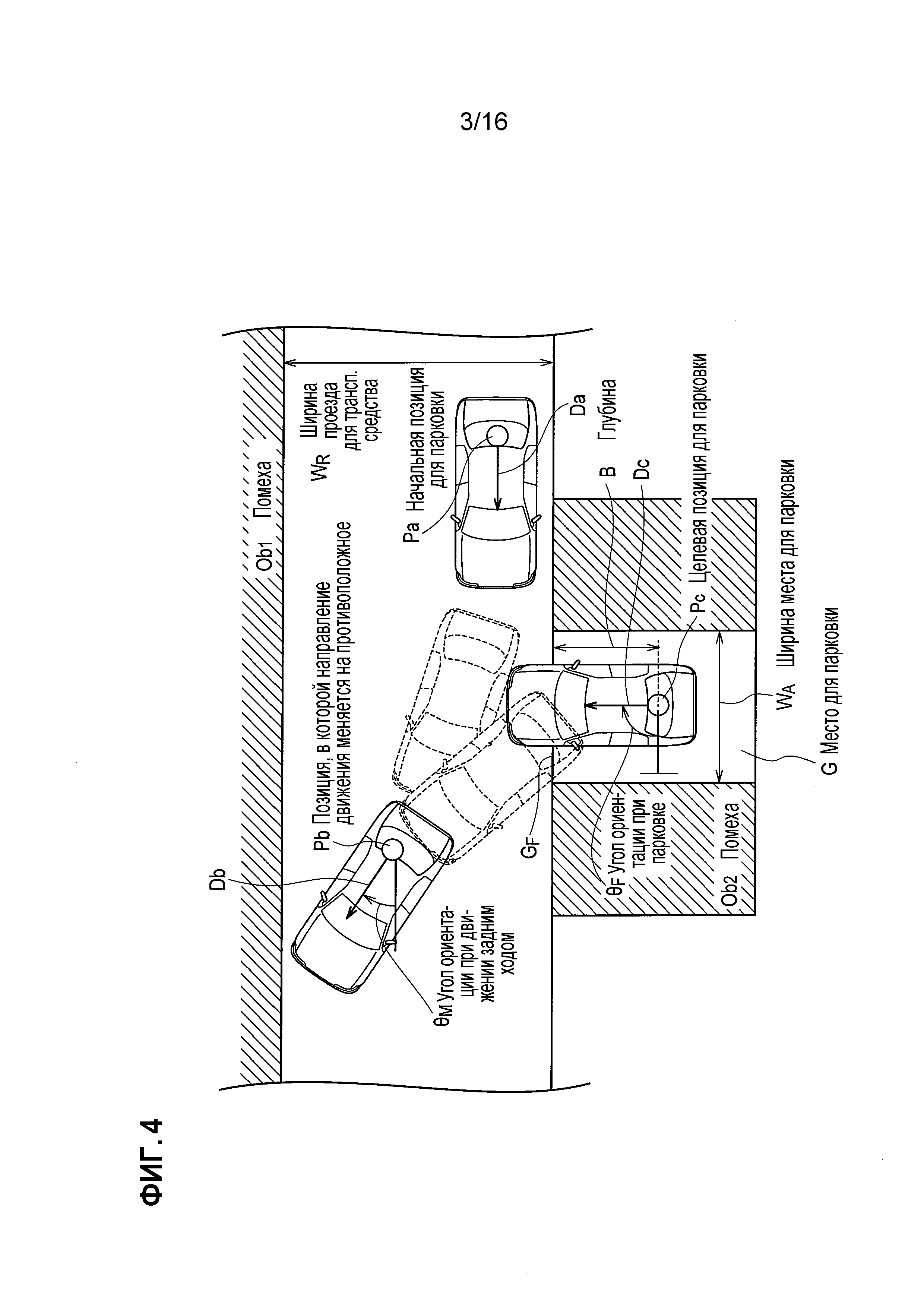
Фиг. 4 является видом сверху, описывающим определения основных терминов в первом варианте осуществления.
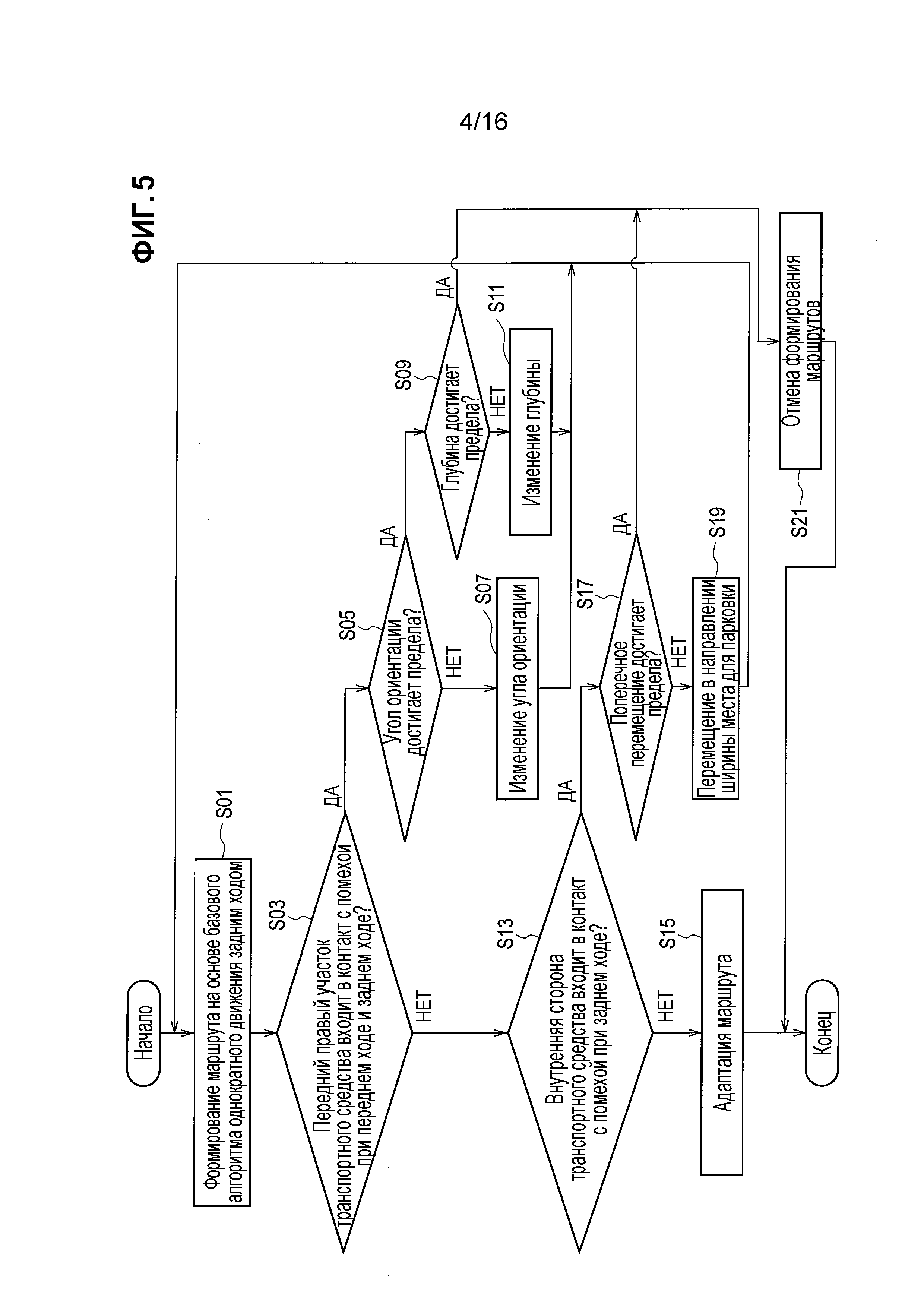
Фиг. 5 является блок-схемой последовательности операций, иллюстрирующей пример способа формирования "маршрута до парковки при однократном движении задним ходом", который осуществляется посредством устройства помощи при парковке по фиг. 1.
Фиг. 6 является видом для пояснения этапа (S03) определения пересечения между передним правым участком транспортного средства и помехой (Ob1) в позиции (Pb), в которой направление движения меняется на противоположное.
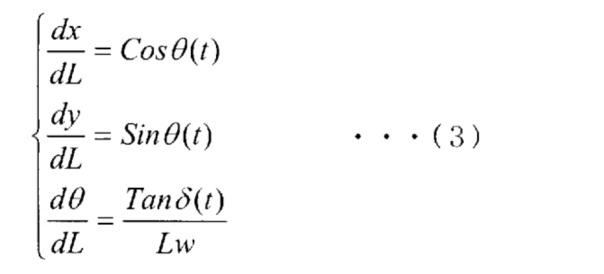
Фиг. 7 является видом для пояснения этапа (S13) определения пересечения между транспортным средством и помехой (Ob2) в секции от позиции (Pb), в которой направление движения меняется на противоположное, до целевой позиции (Pc) для парковки.
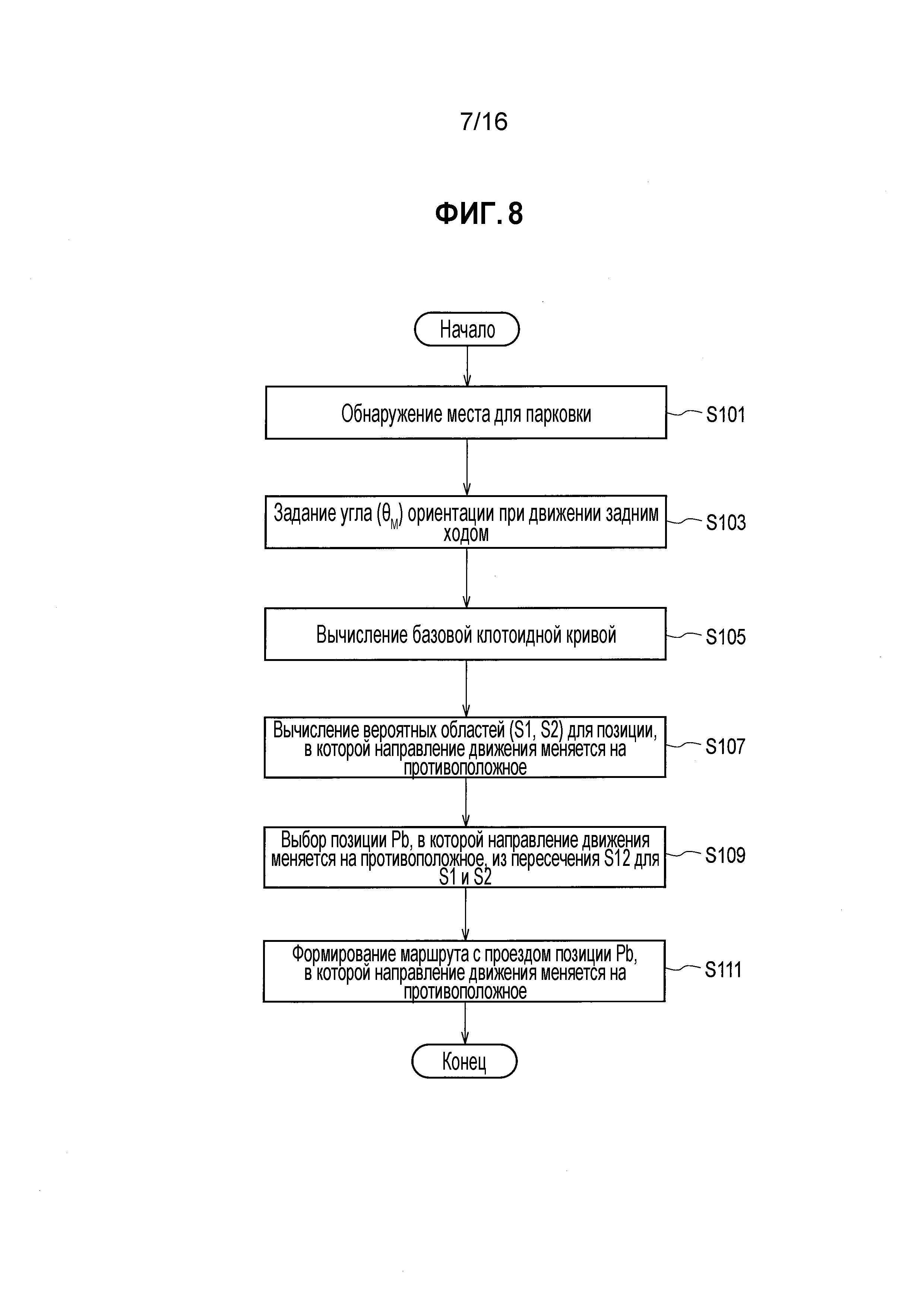
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей пример подробных процедур на этапе S01 по фиг. 5.
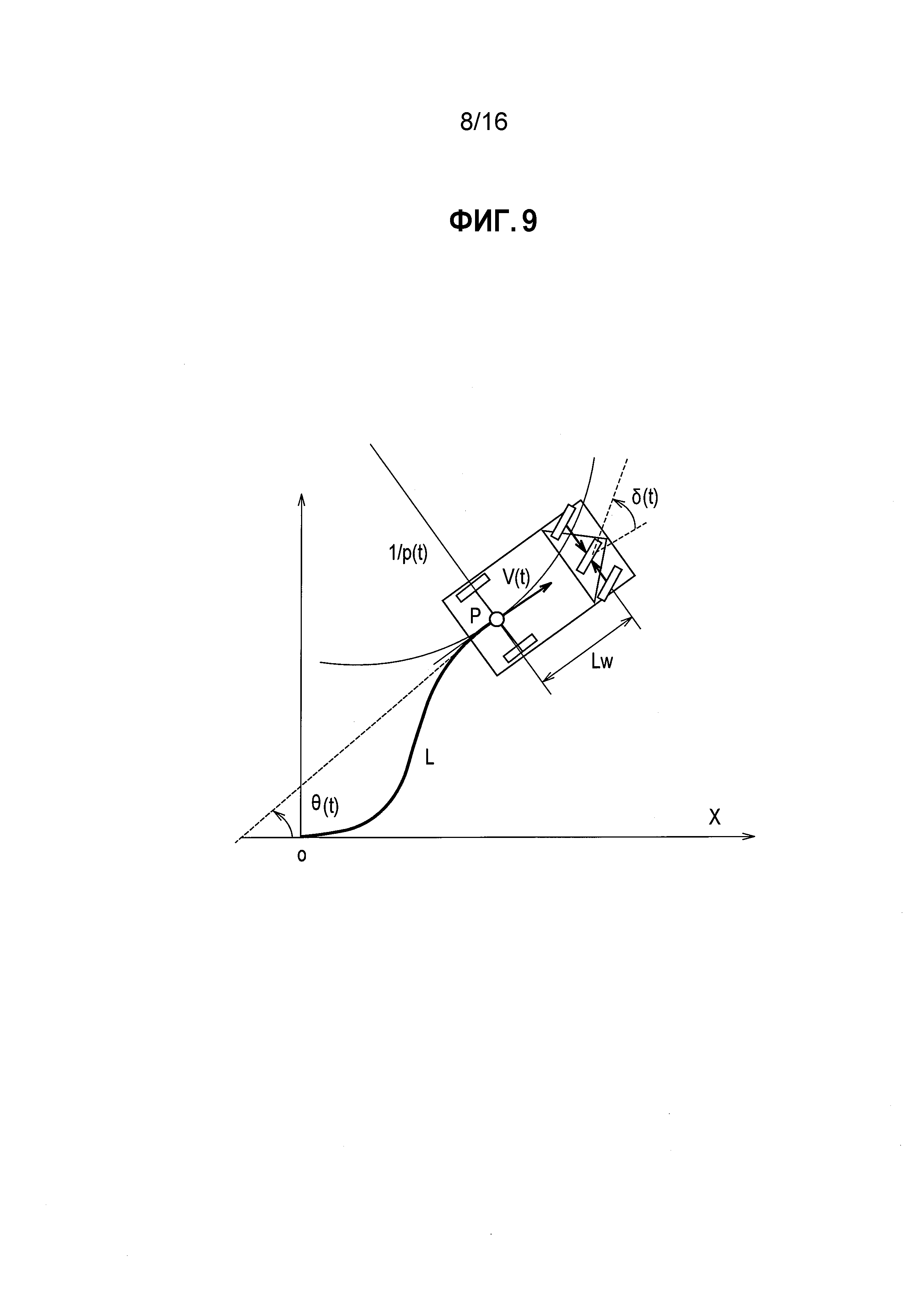
Фиг. 9 является видом, иллюстрирующим модель транспортного средства Аккермана-Жанто.
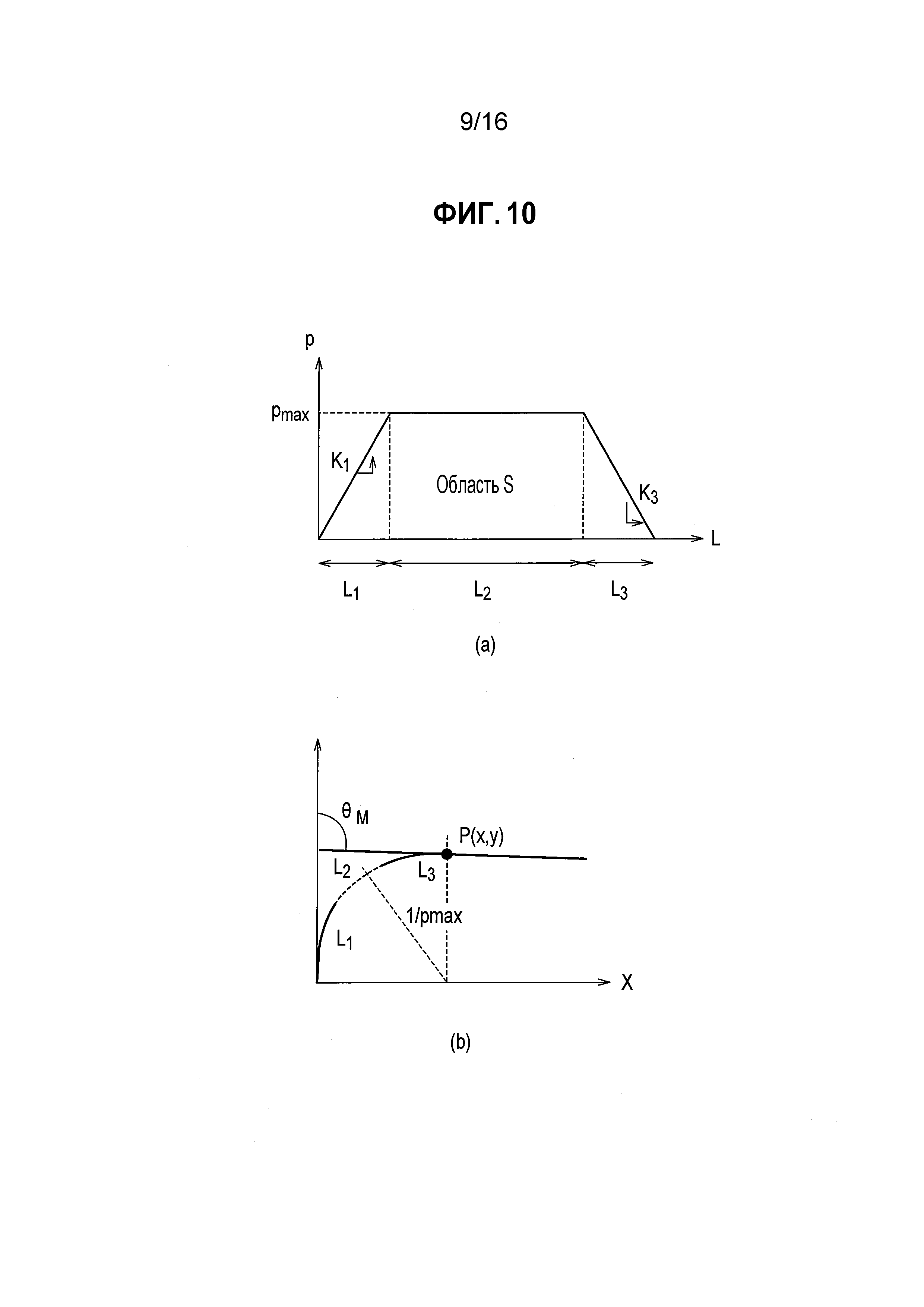
Фиг. 10 включает в себя графики, иллюстрирующие взаимосвязи между кривизной (ρ) клотоидной кривой и траекторией движения, и иллюстрирует случай, когда шины рулятся до максимальной кривизны (ρmax), соответствующей минимальному радиусу поворота транспортного средства.
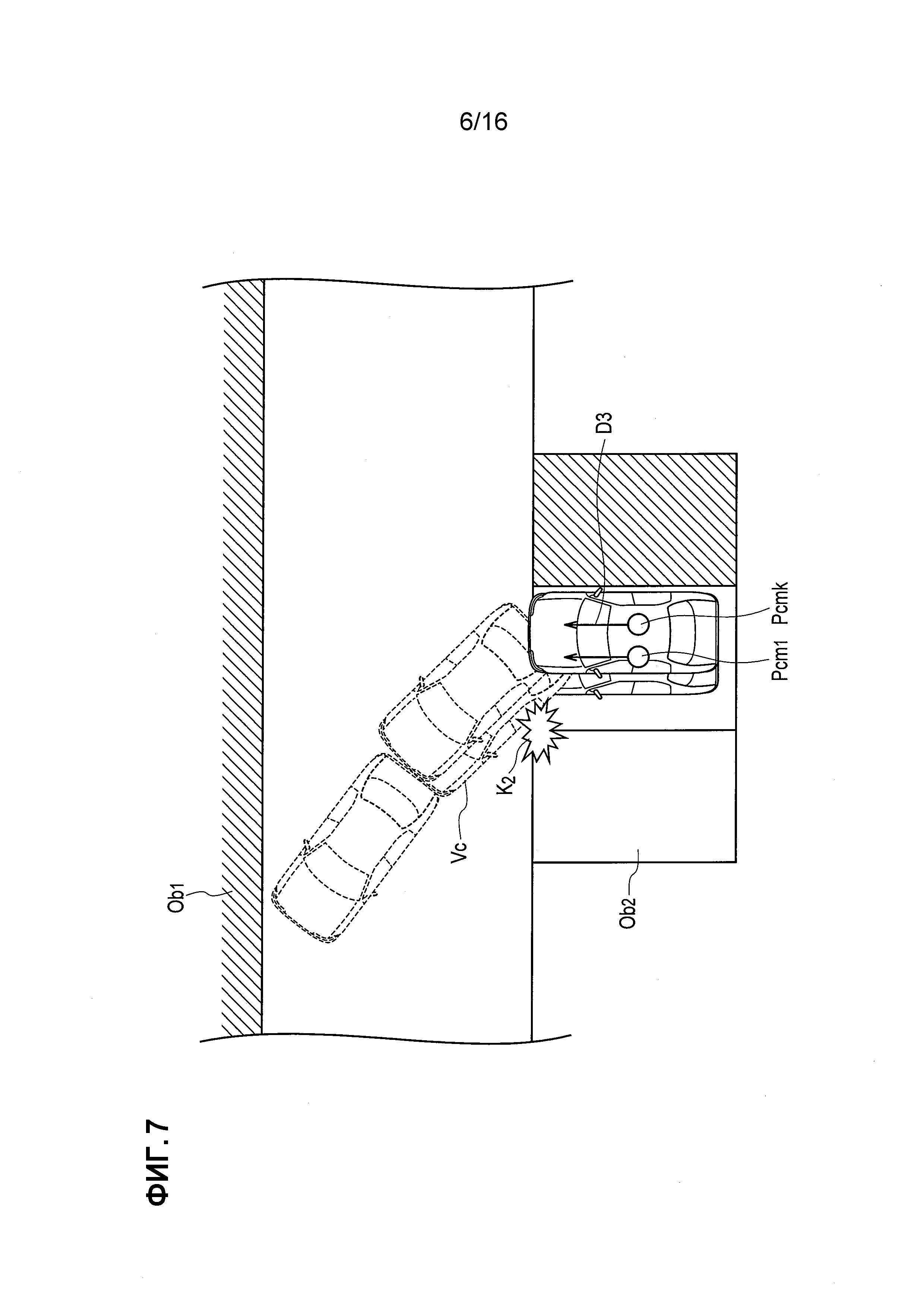
Фиг. 11 включает в себя графики, иллюстрирующие взаимосвязи между кривизной (ρ) клотоидной кривой и траекторией движения, и иллюстрирует случай, когда шины не рулятся до максимальной кривизны (ρmax).
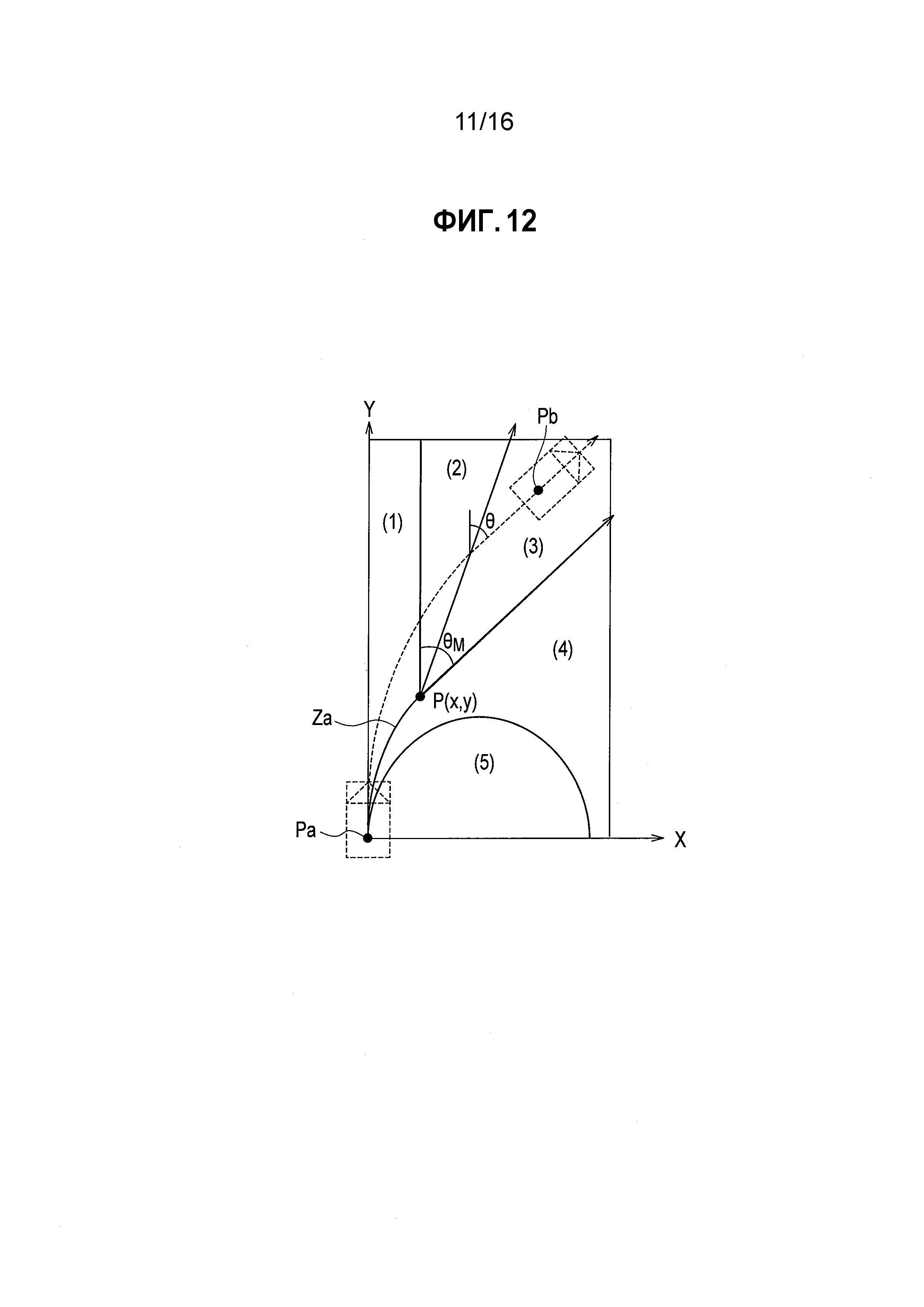
Фиг. 12 является графиком, иллюстрирующим диапазон, в который может попадать конечная точка траектории, формирующей клотоидную кривую.
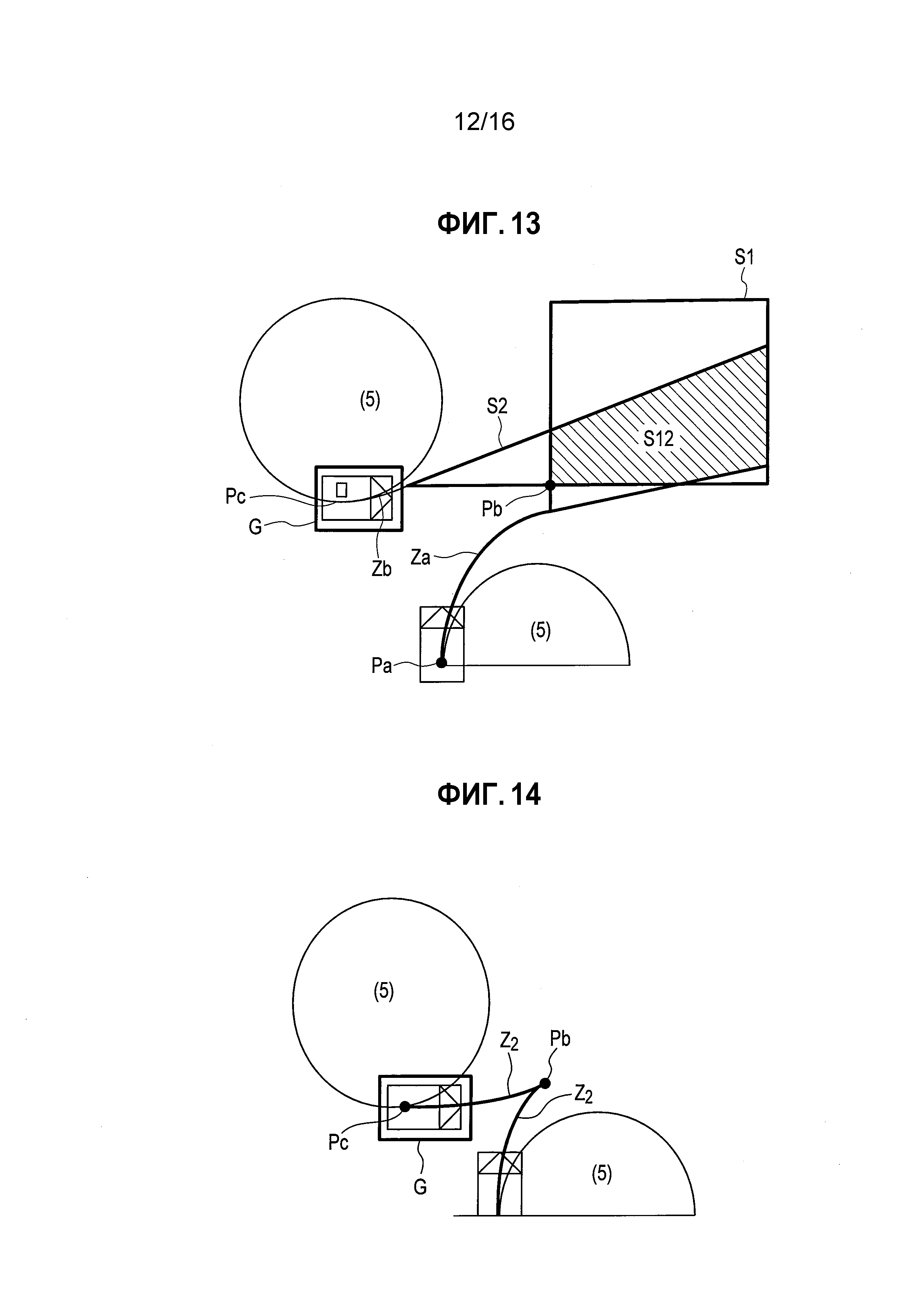
Фиг. 13 является схемой, иллюстрирующей базовую клотоидную кривую (Za), начальная точка которой находится в начальной позиции (Pa) для парковки, и базовую клотоидную кривую (Zb), начальная точка которой находится в целевой позиции (Pc) для парковки.
Фиг. 14 является схемой, иллюстрирующей клотоидную кривую (Z1) от начальной позиции (Pa) для парковки до позиции (Pb), в которой направление движения меняется на противоположное, и клотоидную кривую (Z2) от позиции (Pb), в которой направление движения меняется на противоположное, до целевой позиции (Pc) для парковки.
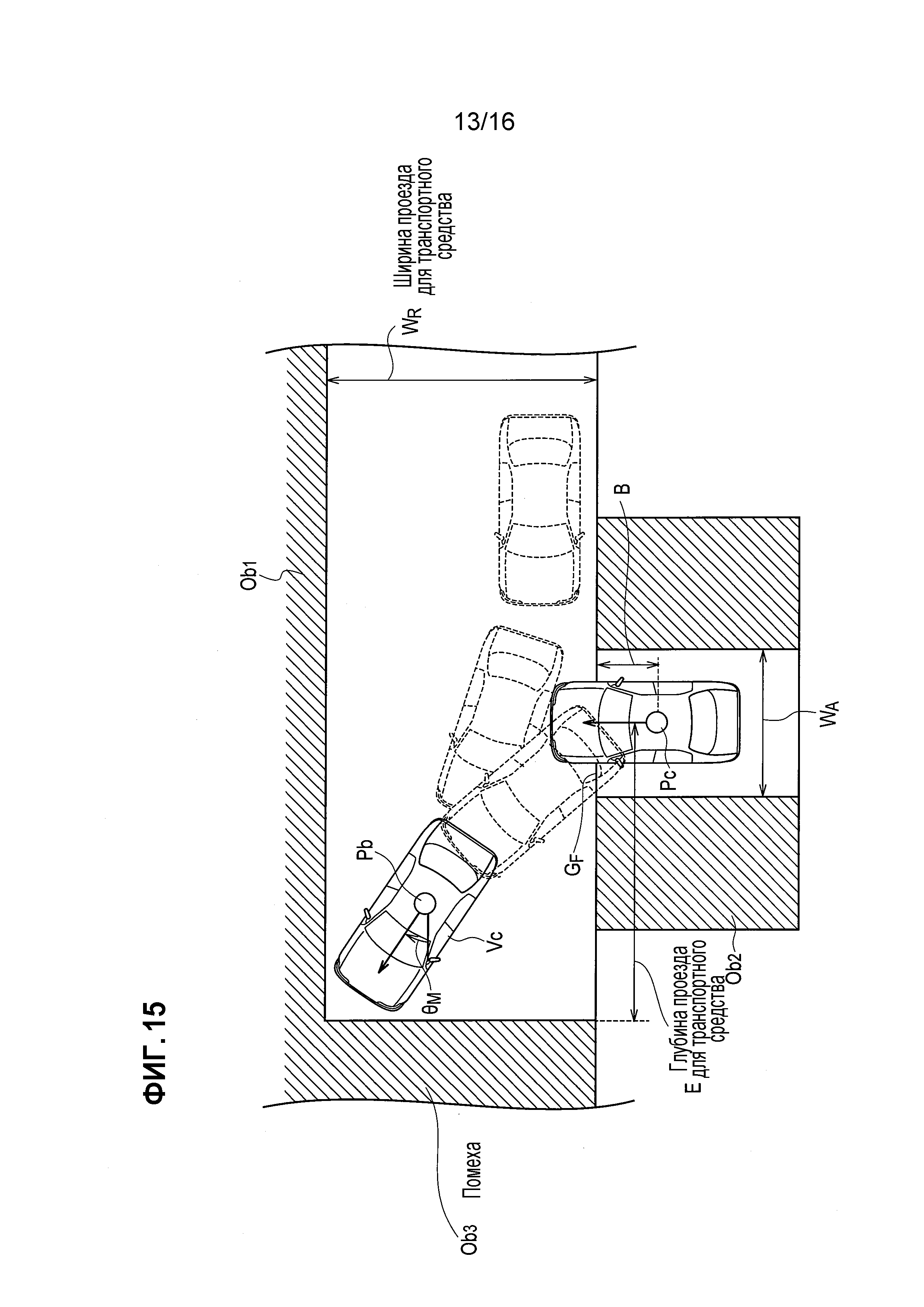
Фиг. 15 является видом сверху, описывающим определения основных терминов во втором варианте осуществления.
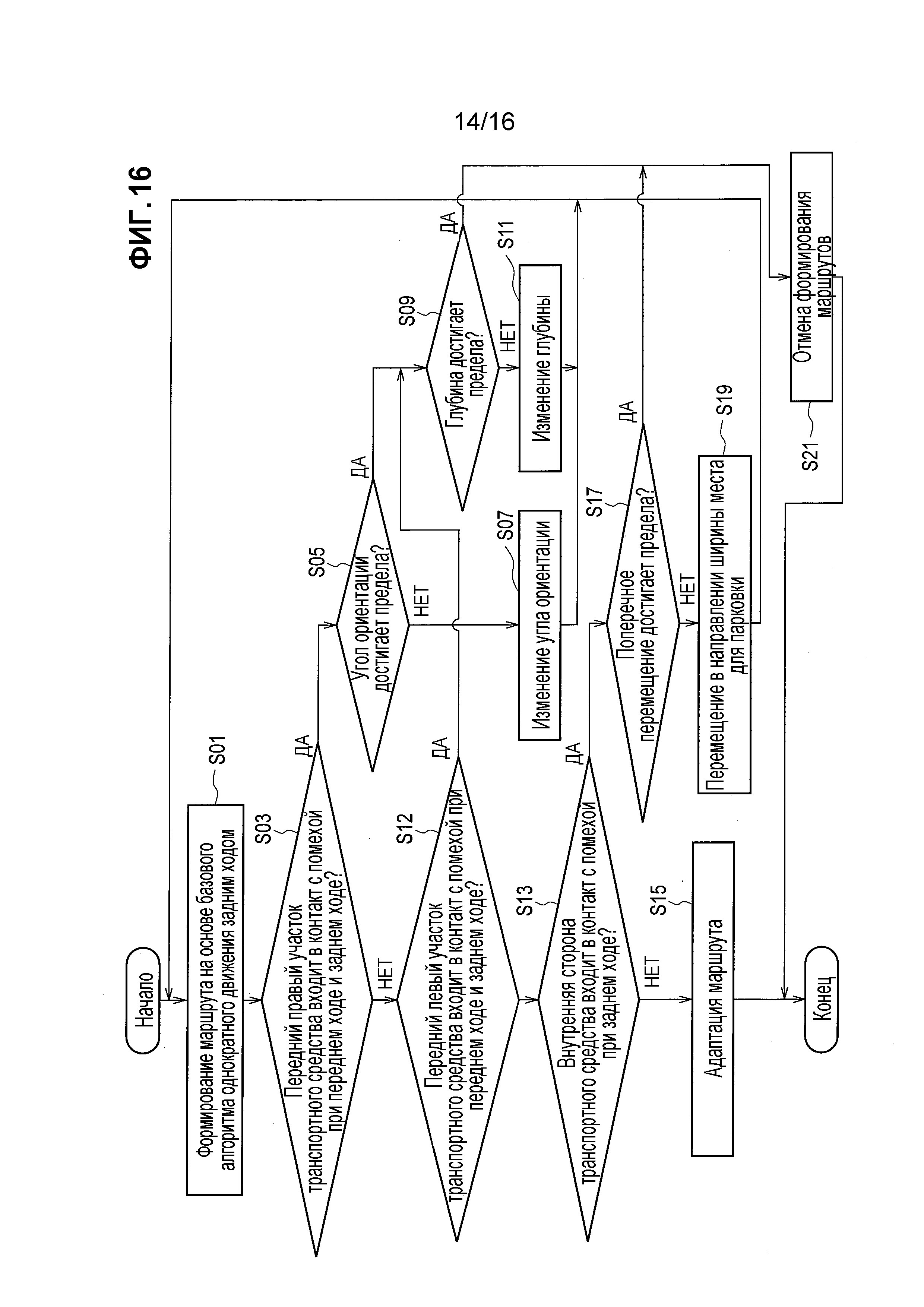
Фиг. 16 является блок-схемой последовательности операций, иллюстрирующей пример способа формирования "маршрута до парковки при однократном движении задним ходом" посредством использования устройства 10b помощи при парковке в части (b) по фиг. 3.
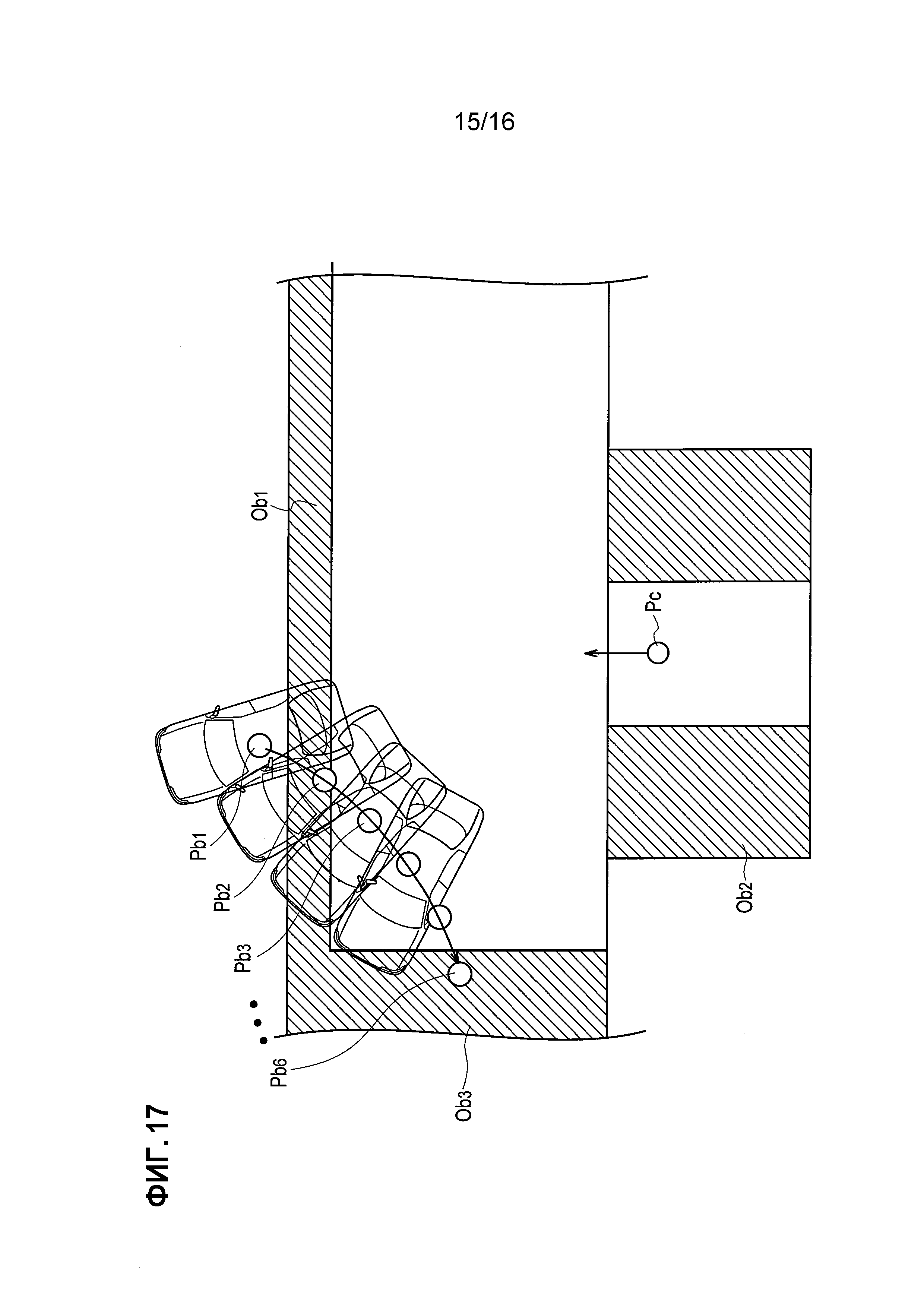
Фиг. 17 является видом для пояснения процедуры поиска углов (θM) ориентации в порядке по убыванию, начиная с начального значения.
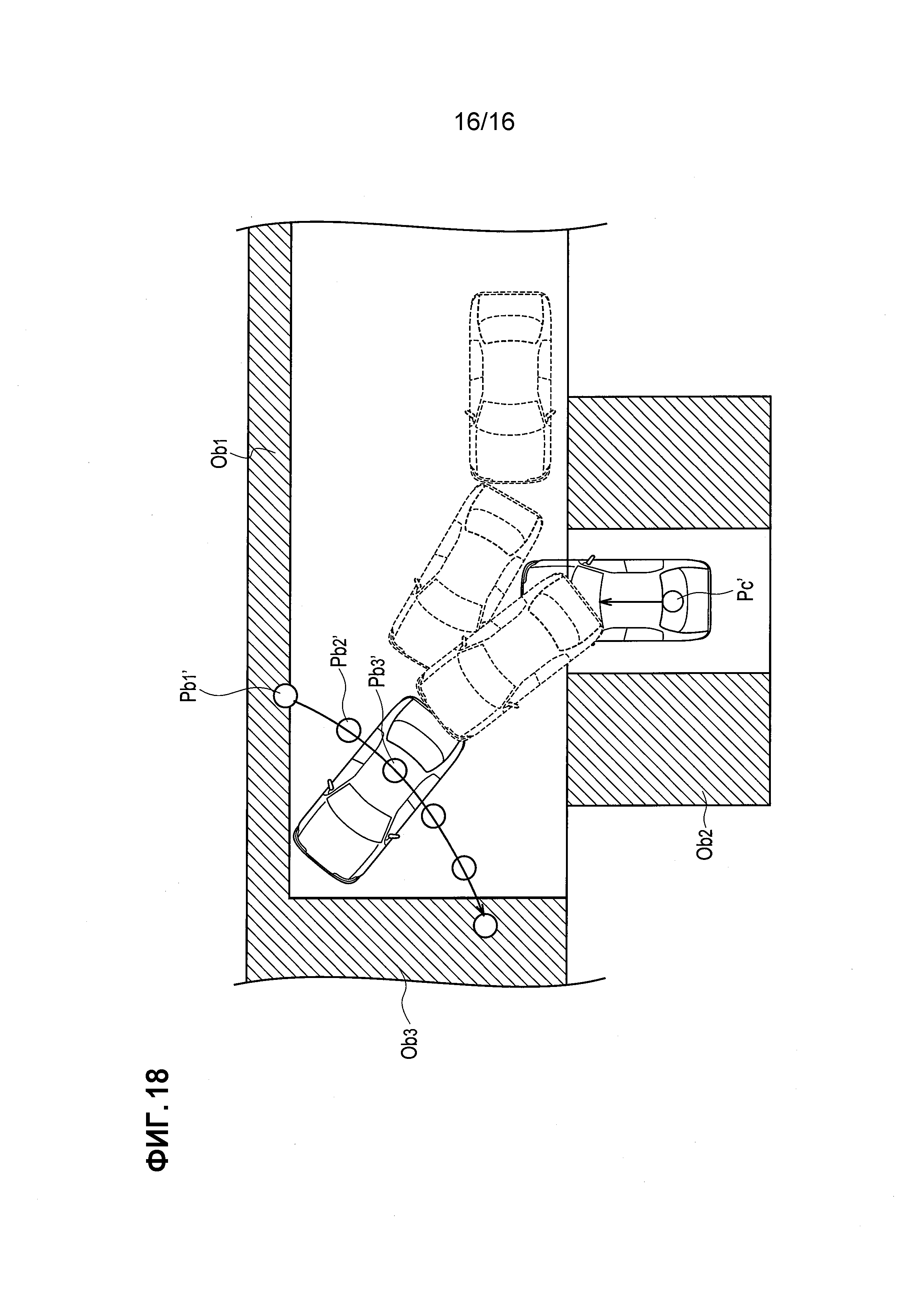
Фиг. 18 является видом для пояснения процедур сдвига целевой позиции (Pc') для парковки относительно целевой позиции для парковки на фиг. 17 в направлении въезда транспортного средства и поиска углов (θM) ориентации снова.
Подробное описание вариантов осуществления
[0009] Первый вариант осуществления
Далее подробно описывается вариант осуществления настоящего изобретения со ссылкой на чертежи.
[0010] Ниже описывается конфигурация устройства помощи при парковке согласно первому варианту осуществления со ссылкой на фиг. 1. Устройство помощи при парковке монтируется в транспортном средстве и вычисляет маршрут, по которому транспортное средство должно двигаться из начальной позиции для парковки (например, текущей позиции) в область для парковки, чтобы направлять транспортное средство по этому маршруту. В частности, устройство помощи при парковке направляет транспортное средство посредством автоматического управления операцией руления транспортного средства. Как проиллюстрировано на фиг. 1, устройство помощи при парковке включает в себя контроллер 10 помощи при парковке, четыре бортовых камеры 1a-1d, которые захватывают видео области около транспортного средства, лазерные дальномеры 8a, 8b (LRF), которые обнаруживают помехи около транспортного средства, дисплей 2, динамик 3, который выводит аудио с инструкциями, актуатор 4 рулевого управления, который осуществляет руление транспортным средством, устройство 5 функционального ввода, которое принимает функциональные вводы, выполненные водителем транспортного средства, датчик 6 угла поворота при рулении, который определяет угол поворота при рулении транспортного средства, и датчик 7 скорости транспортного средства, который определяет скорость транспортного средства транспортного средства.
[0011] Бортовые камеры 1a-1d представляют собой CCD-камеры или CMOS-камеры, которые имеют угол обзора, например, примерно в 180 градусов. Четыре бортовых камеры 1a-1d монтируются в соответствующих участках транспортного средства, чтобы захватывать видео всей зоны, окружающей транспортное средство. В частности, как проиллюстрировано, например, на фиг. 2, бортовая камера 1a присоединяется к решетке радиатора транспортного средства, бортовая камера 1b присоединяется к боковому левому зеркалу, бортовая камера 1c присоединяется к задней накладке, и бортовая камера 1d присоединяется к правому боковому зеркалу, и бортовые камеры 1a-1d захватывают видео зоны в предварительно определенном диапазоне в области около транспортного средства.
[0012] Бортовые камеры 1a-1d непрерывно выполняют захват изображений несколько раз в ходе движения транспортного средства, и это обеспечивает измерение расстояния до каждой из помех (включающих в себя другие транспортные средства и стены), появляющихся в нескольких видео, и измерение направления, в котором существует помеха. Альтернативно, расстояние до помехи и направление, в котором существует помеха, может измеряться посредством использования двух видео, одновременно захваченных посредством пары камер (стереокамеры). Бортовые камеры 1a-1d могут определять, в дополнение к помехам, место для парковки, которое представляет собой пример области для парковки посредством распознавания сигнальных линий дорожной разметки, нарисованных на поверхности дороги. Сигнальные линии дорожной разметки могут распознаваться посредством выполнения обработки обнаружения краев для видео.
[0013] Лазерные дальномеры 8a, 8b (LRF) испускают инфракрасный лазер в каждую из помех и могут измерять расстояние до помехи и направление, в котором помеха существует, на основе степени отражения инфракрасного лазера. Поле обзора лазерных дальномеров 8a, 8b составляет 200 градусов или более. Каждый из лазерных дальномеров 8a, 8b за счет этого обнаруживает расстояние от левой боковой поверхности или правой боковой поверхности транспортного средства до помехи, существующей впереди транспортного средства. Следует отметить, что сонар зазора, использующий ультразвуковую волну, может задаваться как другое средство для измерения расстояния до каждой помехи около транспортного средства.
[0014] Дисплей 2 представляет собой устройство отображения, такое как жидкокристаллический дисплей, установленный в салоне транспортного средства транспортного средства, и отображает вид "с высоты птичьего полета" области около транспортного средства, сформированный посредством контроллера 10 помощи при парковке, и различные типы вспомогательной информации, полезной в случае, если водитель выполняет операции вождения при парковке. Аудиодинамик, в общем, монтируемый в транспортном средстве и т.п., используется в качестве динамика 3, и динамик 3 выводит различные типы аудио с инструкциями для помощи при парковке.
[0015] Например, дисплей 2 может отображать символ, указывающий текущую позицию транспортного средства, символы в рамке, указывающие целевую позицию для парковки и позицию, в которой направление движения меняется на противоположное, и информацию, инструктирующую касательно угла поворота при рулении для руления в каждой из текущей позиции транспортного средства и позиции, в которой направление движения меняется на противоположное. Динамик 3 может предоставлять аудиоинструкцию, инструктирующую касательно направления, в котором руль должен рулиться таким образом, что транспортное средство может перемещаться по маршруту. Это обеспечивает возможность более точной помощи при парковке.
[0016] Актуатор 4 рулевого управления управляется посредством контроллера 10 помощи при парковке и осуществляет рулевое управление транспортного средства. Например, электромотор рулевого привода устройства-электронного усилителя рулевого управления (EPS), которое выполняет электрическое усиление при операции руления водителем, либо аналогичное устройство используется в качестве актуатора 4 рулевого управления. Контроллер 10 помощи при парковке автоматически управляет операцией руления транспортного средства таким образом, что транспортное средство может перемещаться по маршруту. Это автоматическое управление рулением позволяет уменьшать рабочую нагрузку водителя при операции парковки.
[0017] Устройство 5 функционального ввода принимает различные типы функциональных вводов, выполненных водителем транспортного средства, и включает в себя, например, клавишу направления, сенсорную панель и т.п. Когда операция выполнена водителем, устройство 5 функционального ввода вводит управляющий сигнал, соответствующий этому функциональному вводу, в контроллер 10 помощи при парковке. Например, устройство 5 функционального ввода принимает целевую позицию для парковки и угол ориентации транспортного средства в целевой позиции для парковки, которые вводятся водителем. Кроме того, датчик 6 угла поворота при рулении и датчик 7 скорости транспортного средства вводят информацию относительно угла поворота при рулении транспортного средства и скорости транспортного средства в контроллер 10 помощи при парковке по мере необходимости.
[0018] Контроллер 10 помощи при парковке состоит из микроконтроллера, включающего в себя, например, CPU, запоминающее устройство и модуль ввода и вывода, и реализует несколько схем обработки информации, включенных в устройство помощи при парковке, посредством выполнения компьютерной программы, установленной заранее. Контроллер 10 помощи при парковке выполняет последовательность циклов обработки информации, в каждом из которых вычисляется маршрут на место для парковки. Контроллер 10 помощи при парковке может служить также в качестве электронного модуля управления (ECU), используемого для других видов управления, связанных с транспортным средством.
[0019] Как проиллюстрировано на фиг. 3, несколько схем обработки информации, реализованных посредством контроллера 10 помощи при парковке, включают в себя схему 21 формирования маршрутов, схему 22 получения ширины проезда для транспортного средства, схему 23 получения ширины парковки, схему 24 поиска углов ориентации и схему 25 поиска целевых позиций для парковки.
[0020] Как проиллюстрировано на фиг. 4, схема 21 формирования маршрутов формирует маршрут, по которому транспортное средство должно двигаться из начальной позиции (Pa) для парковки, через позицию (Pb), в которой направление движения меняется на противоположное, на место (G) для парковки, на котором должно парковаться транспортное средство. В частности, схема 21 формирования маршрутов формирует так называемый "маршрут до парковки при однократном движении задним ходом", в котором транспортное средство должно двигаться передним ходом от начальной позиции (Pa) для парковки до позиции (Pb), в которой направление движения меняется на противоположное, и затем рулиться в противоположном направлении, чтобы двигаться задним ходом в целевую позицию (Pc) для парковки, заданную в месте (G) для парковки.
[0021] Схема 21 формирования маршрутов задает целевую позицию для парковки и угол ориентации в целевой позиции для парковки при использовании транспортного средства в начале парковки в качестве опорного элемента. Например, схема 21 формирования маршрутов задает позицию транспортного средства в начале помощи при парковке в качестве начальной позиции (Pa) для парковки и задает целевую позицию (Pc) для парковки относительно начальной позиции (Pa) для парковки. В частности, схема 21 формирования маршрутов задает целевую позицию (Pc) для парковки в системе координат, исходная точка которой представляет собой начальную позицию (Pa) для парковки. Кроме того, например, схема 21 формирования маршрутов задает угол между направлением (Dc) движения транспортного средства в целевой позиции (Pc) для парковки и направлением (Da) движения транспортного средства в начальной позиции (Pa) для парковки, который представляет собой угол (θF) ориентации при завершении парковки. Следует отметить, что в варианте осуществления, "угол (θ) ориентации" представляет собой угол относительно направления движения транспортного средства в начале парковки. Тем не менее, угол ориентации не ограничен углом относительно направления движения транспортного средства в начале парковки. Альтернативно, угол ориентации может представлять собой угол относительно помехи (Ob1) рядом с проездом для транспортного средства в направлении ширины или угол относительно помехи (Ob2) рядом с областью для парковки в направлении ширины. Следует отметить, что промежуточная позиция между двумя задними колесами предоставляется в качестве примера каждой из начальной позиции для парковки, целевой позиции для парковки и позиции, в которой направление движения меняется на противоположное (описана ниже).
[0022] Схема 21 формирования маршрутов принимает сигналы, выведенные из различных датчиков, включающих в себя бортовые камеры 1a-1d, лазерные дальномеры 8a, 8b (LRF) и сонар зазора, как описано выше. Схема 21 формирования маршрутов за счет этого распознает позиции и направления помех (включающих в себя другие транспортные средства и стены) и сигнальные линии дорожной разметки около транспортного средства, обнаруживает область для парковки и определяет целевую позицию для парковки и угол ориентации в целевой позиции для парковки при парковке транспортного средства в области для парковки. Следует отметить, что информация относительно распознанных помех и сигнальных линий дорожной разметки записывается в ECU в качестве картографической информации. Альтернативно, схема 21 формирования маршрутов может получать информацию из инфраструктуры, которая предоставляет информацию относительно открытого пространства для парковки, и определять целевую позицию для парковки и угол ориентации в целевой позиции для парковки. В качестве другой альтернативы, схема 21 формирования маршрутов может отображать изображение, захваченное посредством бортовых камер, и определять целевую позицию для парковки и угол ориентации в целевой позиции для парковки на основе позиции и направления, указываемых водителем в отображаемом изображении.
[0023] Затем, схема 21 формирования маршрутов формирует маршрут до парковки при однократном движении задним ходом на основе целевой позиции для парковки, угла ориентации в целевой позиции для парковки и угла (θM) ориентации в позиции (Pb), в которой направление движения меняется на противоположное, посредством использования "базового алгоритма однократного движения задним ходом". Ниже описывается "базовый алгоритм однократного движения задним ходом" со ссылкой на фиг. 8-14. Посредством формирования маршрута, схема 21 формирования маршрутов может одновременно определять позицию (Pb), в которой направление движения меняется на противоположное, проиллюстрированную на фиг. 4.
[0024] Схема 22 получения ширины проезда для транспортного средства вычисляет ширину (WR) "проезда для транспортного средства", проиллюстрированного на фиг. 4, на основе позиций и направлений помех (включающих в себя другие транспортные средства и стены) и сигнальных линий дорожной разметки около транспортного средства, которые распознаются посредством схемы 21 формирования маршрутов. "Проезд для транспортного средства" представляет собой зону, к которой обращена область для парковки (например, место G для парковки), и представляет собой зону возможности движения транспортного средства. Схема 22 получения ширины проезда для транспортного средства может вычислять ширину (WR) зоны возможности движения транспортного средства (проезда для транспортного средства) на основе позиций и направлений помех (включающих в себя другие транспортные средства и стены) и сигнальных линий дорожной разметки около транспортного средства. Как и следовало ожидать, схема 22 получения ширины проезда для транспортного средства может получать информацию относительно ширины проезда для транспортного средства из инфраструктуры вместе с информацией относительно открытого пространства для парковки.
[0025] Схема 23 получения ширины парковки вычисляет ширину области для парковки, обнаруженной посредством схемы 21 формирования маршрутов. Как и следовало ожидать, ширина области для парковки может получаться снаружи, к примеру, ширина (WR) проезда для транспортного средства, или задаваться равным значению, введенному водителем. Здесь, ширина (WA) места для парковки, проиллюстрированная на фиг. 4 используется в качестве примера ширины области для парковки.
[0026] Как проиллюстрировано на фиг. 4, схема 24 поиска углов ориентации ищет углы (θM) ориентации транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное, на основе ширины (WR) проезда для транспортного средства. В этом случае, схема 24 поиска углов ориентации ищет углы (θM) ориентации, чтобы обеспечивать формирование маршрута, на котором передний участок транспортного средства не пересекается в позиции (Pb), в которой направление движения меняется на противоположное, с помехой (Ob1) рядом с проездом для транспортного средства в направлении ширины.
[0027] Схема 24 поиска углов ориентации задает угол (θM) ориентации транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное, равным определенному углу (θM) ориентации и затем определяет то, пересекается или нет передний участок транспортного средства с помехой (Ob1) в позиции (Pb), в которой направление движения меняется на противоположное, на маршруте, сформированном на основе заданного угла (θM) ориентации. При определении того, что передний участок пересекается, схема 24 поиска углов ориентации изменяет угол (θM) ориентации транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное. Схема 24 поиска углов ориентации определяет то, пересекается или нет передний участок транспортного средства с помехой рядом с проездом для транспортного средства в направлении ширины в позиции (Pb), в которой направление движения меняется на противоположное, на маршруте, сформированном на основе измененного угла (θM) ориентации. Изменение угла (θM) ориентации и формирование маршрута повторяются до тех пор, пока схема 24 поиска углов ориентации не определит то, что никакого пересечения не возникает. Схема 24 поиска углов ориентации за счет этого ищет углы (θM) ориентации, чтобы обеспечивать формирование маршрута, на котором транспортное средство не пересекается с помехой.
[0028] Чем меньше ширина (WR) проезда для транспортного средства, тем меньшим имеет тенденцию быть угол (θM) ориентации в позиции (Pb), в которой направление движения меняется на противоположное. Соответственно, схема 24 поиска углов ориентации начинает поиск углов (θM) ориентации из угла (θF) ориентации при завершении парковки и затем выполняет поиск в порядке по убыванию, начиная с угла (θF) ориентации. В частности, при определении того, что пересечение возникает, схема 24 поиска углов ориентации постепенно уменьшает угол (θM) ориентации транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное, и задает постепенно уменьшенный угол в качестве нового угла (θM) ориентации. Затем схема 24 поиска углов ориентации выбирает наибольший угол (θM) ориентации из углов ориентации, которые обеспечивают формирование маршрутов, на которых транспортное средство не пересекается с помехой (Ob1) в позиции (Pb), в которой направление движения меняется на противоположное. Выбор наибольшего угла ориентации обеспечивает формирование маршрута, на котором транспортное средство с меньшей вероятностью пересекается с помехой (Ob2) в секции от позиции (Pb), в которой направление движения меняется на противоположное, до целевой позиции (Pc) для парковки.
[0029] Схема 25 поиска целевых позиций для парковки ищет целевые позиции (Pc) для парковки на месте (G) для парковки на основе ширины (WR) проезда для транспортного средства, чтобы обеспечивать формирование маршрута, на котором передний участок транспортного средства не пересекается в позиции (Pb), в которой направление движения меняется на противоположное, с помехой (Ob1) рядом с проездом для транспортного средства в направлении ширины.
[0030] Схема 25 поиска целевых позиций для парковки задает целевые позиции (Pc) для парковки на месте (G) для парковки равными определенным целевым позициям (Pc) для парковки и затем определяет то, пересекается или нет передний участок транспортного средства с помехой (Ob1) в позиции (Pb), в которой направление движения меняется на противоположное, на маршруте, сформированном на основе заданной целевой позиции (Pc) для парковки. При определении того, что пересечение возникает, схема 25 поиска целевых позиций для парковки изменяет целевую позицию (Pc) для парковки на месте (G) для парковки. Схема 25 поиска целевых позиций для парковки определяет то, пересекается или нет передний участок транспортного средства с помехой рядом с проездом для транспортного средства в направлении ширины в позиции (Pb), в которой направление движения меняется на противоположное, на маршруте, сформированном на основе измененной целевой позиции (Pc) для парковки. Изменение целевой позиции (Pc) для парковки и формирование маршрута повторяются до тех пор, пока схема 25 поиска целевых позиций для парковки не определит то, что пересечение не возникает. Схема 25 поиска целевых позиций для парковки за счет этого ищет целевые позиции (Pc) для парковки, чтобы обеспечивать формирование маршрута, на котором транспортное средство не пересекается с помехой.
[0031] Как проиллюстрировано на фиг. 4, чем больше расстояние (глубина B) от конца (GF) места (G) для парковки на стороне въезда транспортного средства до целевой позиции (Pc) для парковки, тем более вероятно, что транспортное средство пересекается с помехой (Ob2) около места (G) для парковки при движении задним ходом. Соответственно, схема 25 поиска целевых позиций для парковки начинает поиск целевых позиций (Pc) для парковки от конца (GF) места (G) для парковки на стороне въезда транспортного средства. В частности, формирование маршрута начинается с задания глубины (B) равной нулю, и схема 25 поиска целевых позиций для парковки ищет глубины (B) в порядке по возрастанию. Более конкретно, при определении того, что пересечение возникает, схема 25 поиска целевых позиций для парковки перемещает целевую позицию (Pc) для парковки в направлении въезда транспортного средства и задает перемещенную позицию в качестве новой целевой позиции (Pc) для парковки. Затем схема 25 поиска целевых позиций для парковки выбирает целевую позицию (Pc) для парковки с наименьшей глубиной (B) из целевых позиций (Pc) для парковки, которые обеспечивают формирование маршрутов, на которых транспортное средство не пересекается с помехой (Ob1) в позиции (Pb), в которой направление движения меняется на противоположное. За счет этого может формироваться маршрут, на котором транспортное средство с меньшей вероятностью пересекается с помехой (Ob2) в секции от позиции (Pb), в которой направление движения меняется на противоположное, до целевой позиции (Pc) для парковки.
[0032] Как описано выше, устройство помощи при парковке измеряет область возможности движения транспортного средства, включающую в себя область для парковки (место G для парковки) и ширину (WR) проезда для транспортного средства. Затем устройство помощи при парковке многократно выполняет формирование маршрутов, определение пересечения и регулирование параметров (угла (θM) ориентации, целевой позиции (Pc) для парковки), чтобы получать маршрут, подходящий для области возможности движения.
[0033] Далее описывается пример способа формирования "маршрута до парковки при однократном движении задним ходом", который осуществляется посредством устройства помощи при парковке по фиг. 1, со ссылкой на фиг. 5-7.
[0034] На этапе S01, маршрут, по которому транспортное средство должно двигаться из начальной позиции (Pa) для парковки, через позицию (Pb), в которой направление движения меняется на противоположное, на место (G) для парковки, на котором должно парковаться транспортное средство, формируется посредством использования "базового алгоритма однократного движения задним ходом". В первом цикле, угол (θM) ориентации в позиции (Pb), в которой направление движения меняется на противоположное, задается равным углу (θF) ориентации при завершении парковки, и целевая позиция (Pc) для парковки задается как конец (GF) места (G) для парковки на стороне проезда для транспортного средства. Ниже описываются подробности этапа S01 со ссылкой на фиг. 8-14.
[0035] Переходя к этапу S03, контроллер 10a помощи при парковке определяет то, пересекается или нет передний участок транспортного средства с помехой (Ob1) рядом с проездом для транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное, на сформированном маршруте. В частности, как проиллюстрировано на фиг. 6, контроллер 10a помощи при парковке определяет то, перемещается или нет правый передний участок транспортного средства за пределы проезда для транспортного средства (области возможности движения) и пересекается или нет с помехой (Ob1) в позиции (Pb), в которой направление движения меняется на противоположное (K1). Когда правый передний участок не пересекается ("Нет" на S03), обработка переходит к этапу S13. Когда правый передний участок пересекается ("Да" на S03), обработка переходит к этапу S05.
[0036] На этапе S05, контроллер 10a помощи при парковке определяет то, может или нет угол (θM) ориентации постепенно уменьшаться. Когда текущий угол (θM) ориентации уже является минимальным значением (например, нулем), постепенное уменьшение не может выполняться. Когда угол (θM) ориентации может постепенно уменьшаться ("Нет" на S05), контроллер 10a помощи при парковке постепенно уменьшает угол (θM) ориентации и возвращается к этапу S01, чтобы формировать маршрут снова посредством использования постепенно уменьшенного угла (θM) ориентации.
[0037] Когда угол (θM) ориентации не может постепенно уменьшаться ("Да" на S05), контроллер 10a помощи при парковке определяет то, может или нет глубина (B) постепенно увеличиваться (S09). Целевая позиция (Pc) для парковки, которая приводит к тому, что транспортное средство располагается за пределами места (G) для парковки, не может задаваться. Когда глубина (B) может постепенно увеличиваться ("Да" на этапе S09), контроллер 10a помощи при парковке постепенно увеличивает глубину (B). В этом случае, угол (θM) ориентации сбрасывается до начального значения, которое представляет собой угол (θF) ориентации при парковке. Затем возвращаясь к этапу S01, маршрут формируется снова посредством использования новой целевой позиции (Pc) для парковки. Как описано выше, контроллер 10a помощи при парковке сначала выполняет поиск маршрута, на котором пересечение не возникает, в то время, когда сканирование углов (θM) ориентации в порядке по убыванию, начиная с начального значения. После этого, когда угол (θM) ориентации достигает своего предела, контроллер 10a помощи при парковке изменяет целевую позицию (Pc) для парковки и выполняет сканирование угла (θM) ориентации из начального значения снова.
[0038] Когда маршрут, на котором пересечение не возникает, формируется до того, как оба из угла (θM) ориентации и целевой позиции (Pc) для парковки достигают пределов ("Нет" на S03), обработка может переходить к этапу S13. Между тем, когда оба из угла (θM) ориентации и целевой позиции (Pc) для парковки достигают пределов ("Да" на этапе S09), контроллер 10a помощи при парковке определяет то, что формирование маршрута при однократном движении задним ходом является трудным, и отменяет формирование маршрутов.
[0039] На этапе S13, контроллер 10a помощи при парковке определяет то, пересекается или нет транспортное средство с помехой (Ob2) в секции от позиции (Pb), в которой направление движения меняется на противоположное, до целевой позиции (Pc) для парковки, как проиллюстрировано на фиг. 7 (K2). Когда транспортное средство пересекается с помехой (Ob2) ("Да" на S13), контроллер 10a помощи при парковке перемещает целевую позицию (Pc) для парковки в направлении ширины места для парковки в пределах диапазона места (G) для парковки ("Нет" на S17). Затем возвращаясь к этапу S01, контроллер 10a помощи при парковке формирует маршрут снова посредством использования перемещенной целевой позиции (Pc) для парковки. В этом случае, угол (θM) ориентации сбрасывается до угла (θF) ориентации при завершении парковки. Аналогично, глубина (B) целевой позиции (Pc) для парковки также сбрасывается до нуля.
[0040] Когда целевая позиция (Pc) для парковки не может перемещаться в направлении ширины места для парковки в пределах диапазона места (G) для парковки ("Да" на S17), обработка переходит к этапу S21.
[0041] Когда транспортное средство не пересекается с помехой (Ob2) ("Нет" на S13), обработка переходит к этапу S15, и маршрут, сформированный в этом цикле, приспосабливается в качестве маршрута, подходящего для области возможности движения.
[0042] Ниже описывается пример подробных процедур на этапе S01 по фиг. 5 со ссылкой на фиг. 8. На этапе S101, схема 21 формирования маршрутов обнаруживает область для парковки (включающую в себя место G для парковки) из позиций и направлений помех (включающих в себя другие транспортные средства и стены) и сигнальных линий дорожной разметки около транспортного средства и определяет целевую позицию (Pc) для парковки и угол (θF) ориентации в целевой позиции (Pc) для парковки при парковке транспортного средства в этой области для парковки.
[0043] Переходя к этапу S103, схема 21 формирования маршрутов задает угол (θM) ориентации в позиции (Pb), в которой направление движения меняется на противоположное. В первом цикле, схема 21 формирования маршрутов задает угол (θM) ориентации равным углу (θF) ориентации, а во втором цикле и далее, изменяет или сбрасывает угол (θM) ориентации в зависимости от инструкции на этапе S07, S11 или S19.
[0044] Переходя к этапу S105, схема 21 формирования маршрутов вычисляет базовую клотоидную кривую на основе целевой позиции (Pc) для парковки, угла (θF) ориентации и угла (θM) ориентации. Ниже описывается способ вычисления базовой клотоидной кривой со ссылкой на фиг. 9-13.
[0045] Модель движения транспортного средства на очень низкой скорости
Известно, что модель транспортного средства Аккермана-Жанто является полезной в анализе транспортного средства, движущегося в режиме движения на очень низкой скорости, к примеру, при парковке, при которой не возникает боковое скольжение колес. Фиг. 9 иллюстрирует эту модель транспортного средства. На фиг. 9, Lw (м) обозначает колесную базу, σ(t) (рад) обозначает угол поворота при рулении от передних колес, V(t) (м/с) обозначает скорость транспортного средства в центре (P) оси задних колес, θ(t) (рад) обозначает угол ориентации транспортного средства, и ρ(t) обозначает кривизну траектории, по которой перемещен центр (P) оси задних колес. Дифференциальное уравнение центра (P) оси задних колес для времени (t) выражается посредством формулы (1).
[0046] Математическое выражение 1
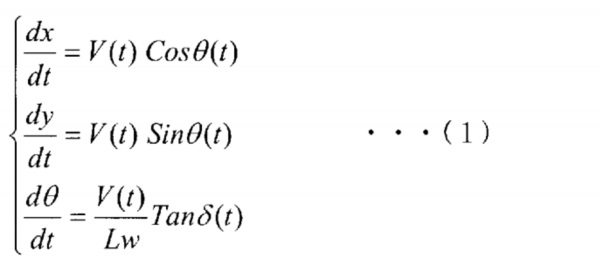
[0047] Производная по времени единичного расстояния выражается посредством формулы (2). Соответственно, формула (3) получается посредством перезаписи формулы (1) в дифференциальное уравнение для проезжаемого расстояния (L).
[0048] Математическое выражение 2

[0049] Математическое выражение 3
[0050] Клотоидная кривая
Когда транспортное средство движется на постоянной скорости транспортного средства и при постоянном углу поворота при рулении руля, траектория транспортного средства формирует клотоидную кривую. В шаблоне руления, в котором угол поворота при рулении шины составляет 0 (рад) в начальной точке и конечной точке целевой траектории, руление в неподвижном состоянии может исключаться, и это является эффективным с точки зрения снижения износа шин и нагрузки на актуатор. Взаимосвязи между кривизной (ρ) и траекторией движения в этом шаблоне руления проиллюстрированы на фиг. 10 и 11. Фиг. 10 иллюстрирует случай, в котором шины рулятся до максимальной кривизны (ρmax), соответствующей минимальному радиусу поворота транспортного средства. Фиг. 11 иллюстрирует случай, в котором шины не рулятся до максимальной кривизны (ρmax). L обозначает проезжаемое расстояние, и k обозначает темп изменения кривизны. В части (a) по фиг. 10 и в части (a) по фиг. 11, поскольку скорость изменения угла поворота при рулении руля является постоянной в траекториях (L1 и L3) движения, траектории (L1 и L3) движения формируют клотоидную кривую. В части (a) по фиг. 10, поскольку угол поворота руля при рулении является постоянным, т.е. угловая скорость является нулевой в траектории (L2) движения, траектория (L2) движения формирует дугу.
[0051] Кривизна (ρ) выражается посредством формулы (4). Соответственно, когда темп (k) изменения кривизны и максимальная кривизна (ρmax) определяются, и целевой угол (θ) ориентации задается, определяется уникальный шаблон изменения кривизны (ρ). Кроме того, взаимосвязь между кривизной (ρ) и углом (σ) поворота при рулении от передних колес является взаимосвязью "один-к-одному". Таким образом, когда целевой угол (θ) ориентации задается, определяется уникальный угол (σ) поворота при рулении от передних колес.
[0052] Математическое выражение 4

[0053] Диапазон, в который может попадать конечная точка траектории, формирующей клотоидную кривую
Предположим случай, в котором маршрут, соединяющий начальную позицию (Pa) для парковки и позицию (Pb), в которой направление движения меняется на противоположное, получается посредством использования клотоидной кривой. Когда угол (θM) ориентации в позиции (Pb), в которой направление движения меняется на противоположное, задается, уникальная траектория движения, по которой транспортное средство движется до тех пор, пока оно не будет отклонено на угол (θM) ориентации относительно направления движения транспортного средства в начальной позиции (Pa) для парковки, может выражаться посредством использования клотоидной кривой.
[0054] Как проиллюстрировано на фиг. 12, эта траектория движения упоминается как базовая клотоидная кривая (Za). Базовая клотоидная кривая (Za) может укрупняться до аналогичной кривой, или прямая линия может добавляться после начальной точки (Pa) или до конечной точки (Pb). Клотоидная кривая, которая формирует угол (θM) ориентации, в силу этого может проводиться в зонах (2) и (3), проиллюстрированных на фиг. 12. Между тем, в других зонах (1), (4) и (5), клотоидная кривая, которая формирует угол (θM) ориентации, не может проводиться. Другими словами, позиция (Pb), в которой направление движения меняется на противоположное, может задаваться в зонах (2) и (3), но не может задаваться в зонах (1), (4) и (5).
[0055] Следует отметить, что зона (2) представляет собой зону, которой транспортное средство может достигать посредством первоначального движения по прямой из начальной позиции (Pa) для парковки и последующего проведения клотоидной кривой. Зона (3) представляет собой зону, которой транспортное средство может достигать посредством первоначального проведения клотоидной кривой из начальной позиции (Pa) для парковки и последующего движения по прямой.
[0056] Фиг. 13 иллюстрирует базовую клотоидную кривую (Za), начальная точка которой находится в начальной позиции (Pa) для парковки, и зона (S1) соответствует зонам (2) и (3), проиллюстрированным на фиг. 12. Базовая клотоидная кривая (Zb), идущая из целевой позиции (Pc) для парковки и формирующаяся угол (θF-θM), полученный посредством вычитания угла (θM) ориентации из угла (θF) ориентации, может аналогично вычисляться. Зона (2) указывает зону, в которой может проводиться клотоидная кривая, идущая из целевой позиции (Pc) для парковки и формирующая угол (θF-θM).
[0057] Возвращаясь к фиг. 8, на этапе S105, схема 21 формирования маршрутов вычисляет базовую клотоидную кривую (Za), начальная точка которой находится в начальной позиции (Pa) для парковки, и базовую клотоидную кривую (Zb), начальная точка которой находится в целевой позиции (Pc) для парковки. Переходя к этапу S107, схема 21 формирования маршрутов вычисляет зоны (S1, S2), проиллюстрированные на фиг. 13.
[0058] Переходя к этапу S109, схема 21 формирования маршрутов извлекает зону (S12), в которой зона (S1) и зона (2) перекрывают друг друга. Затем, как проиллюстрировано на фиг. 13, схема 21 формирования маршрутов выбирает такую позицию в зоне (S12), что получаются кратчайшая клотоидная кривая, начальная точка которой находится в начальной позиции (Pa) для парковки, и кратчайшая клотоидная кривая, начальная точка которой находится в целевой позиции (Pc) для парковки, в качестве позиции (Pb), в которой направление движения меняется на противоположное.
[0059] На этапе S111, как проиллюстрировано на фиг. 14, схема 21 формирования маршрутов соединяет клотоидную кривую (Z1) от начальной позиции (Pa) для парковки до позиции (Pb), в которой направление движения меняется на противоположное, и клотоидную кривую (Z2) от позиции (Pb), в которой направление движения меняется на противоположное, до целевой позиции (Pc) для парковки. В силу этого маршрут завершается.
[0060] В первом варианте осуществления, описанном выше, могут получаться следующие операции и преимущества.
[0061] Схема 24 поиска углов ориентации ищет углы (θM) ориентации транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное, на основе ширины (WR) проезда для транспортного средства, чтобы обеспечивать формирование маршрута, на котором передний участок транспортного средства не пересекается в позиции (Pb), в которой направление движения меняется на противоположное, с помехой (Ob1) рядом с проездом для транспортного средства в направлении ширины. Маршрут, на котором транспортное средство не пересекается с помехами (Ob1, Ob2) около проезда для транспортного средства, может за счет этого формироваться также в окружении, в котором ширина (WR) проезда для транспортного средства является небольшой.
[0062] Схема 24 поиска углов ориентации выбирает наибольший угол ориентации из углов (θM) ориентации транспортного средства, которые обеспечивают формирование маршрутов, на которых передний участок транспортного средства не пересекается в позиции (Pb), в которой направление движения меняется на противоположное, с помехой (Ob1) рядом с проездом для транспортного средства в направлении ширины. За счет этого может формироваться маршрут, на котором транспортное средство с меньшей вероятностью пересекается с помехами за пределами позиции, в которой направление движения меняется на противоположное.
[0063] В первом варианте осуществления, приводится описание случая, когда начальное значение (начальный угол ориентации) угла (θF) ориентации задается равным углу (θF) ориентации при завершении парковки. Тем не менее, чем меньше ширина (WR) проезда для транспортного средства, тем меньшим имеет тенденцию быть угол (θM) ориентации в позиции (Pb), в которой направление движения меняется на противоположное. Соответственно, в случае поиска углов (θM) ориентации в порядке по убыванию, начиная с начального значения (начальный угол ориентации), начальное значение (начальный угол ориентации) может задаваться таким образом, что чем меньше ширина (WR), тем меньше начальное значение (начальный угол ориентации). Это позволяет уменьшать бесполезное время поиска и добиваться уменьшения нагрузки по обработке информации и быстрого расчета маршрута.
[0064] В некоторых случаях, маршрут, на котором передний участок транспортного средства не пересекается с помехой (Ob1) в позиции (Pb), в которой направление движения меняется на противоположное, не может формироваться посредством поиска углов (θM) ориентации ("Да" на S05). В этом случае, схема 24 поиска углов ориентации перемещает целевую позицию (Pc) для парковки в направлении въезда транспортного средства от конца (GF) места (G) для парковки на стороне въезда транспортного средства (S11). Затем схема 24 поиска углов ориентации ищет углы (θM) ориентации транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное, на основе перемещенной целевой позиции (Pc) для парковки. Преимущество, аналогичное преимуществу в случае, если ширина (WR) проезда для транспортного средства увеличивается, может получаться при формировании маршрутов посредством перемещения целевой позиции (Pc) для парковки в направлении въезда транспортного средства. Маршрут, на котором транспортное средство не пересекается с помехами около проезда для транспортного средства, может за счет этого формироваться также в окружении, в котором ширина (WR) проезда для транспортного средства является небольшой.
[0065] Кроме того, схема 24 поиска углов ориентации выбирает целевую позицию (Pc) для парковки, для которой величина перемещения (глубина B) является наименьшей в направлении въезда транспортного средства, из целевых позиций (Pc) для парковки, которые обеспечивают формирование маршрутов, на которых транспортное средство не пересекается с помехой (Ob2) рядом с местом для парковки в направлении ширины. За счет этого может формироваться маршрут, на котором транспортное средство с меньшей вероятностью пересекается с помехой (Ob2) в секции от позиции (Pb), в которой направление движения меняется на противоположное, до целевой позиции (Pc) для парковки.
[0066] В некоторых случаях, маршрут, на котором транспортное средство не пересекается с помехой (Ob1) в позиции (Pb), в которой направление движения меняется на противоположное, не может формироваться посредством перемещения целевой позиции (Pc) для парковки в направлении въезда транспортного средства от конца (GF) места (G) для парковки и посредством поиска углов (θM) ориентации ("Да" на S09). В этом случае, схема 24 поиска углов ориентации определяет то, что маршрут, по которому транспортное средство должно двигаться на место (G) для парковки через позицию (Pb), в которой направление движения меняется на противоположное, не может формироваться (S21). Устройство помощи при парковке может определять то, что затруднительно формировать "маршрут до парковки при однократном движении задним ходом" посредством использования угла (θM) ориентации и глубины (B) целевой позиции (Pc) для парковки в качестве переменных. Соответственно, можно начинать формирование маршрута до парковки, на котором движение задним ходом выполняется два или более раз. Альтернативно, устройство помощи при парковке может фактически перемещать транспортное средство в точку за один шаг до столкновения с помехой и затем выполнять формирование маршрутов снова.
[0067] Схема 24 поиска углов ориентации задает угол (θM) ориентации транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное (S103). Контроллер 10a помощи при парковке определяет то, пересекается или нет передний участок транспортного средства с помехой (Ob1) рядом с проездом для транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное, на маршруте, сформированном на основе заданного угла (θM) ориентации (S03). При определении того, что пересечение возникает ("Да" на S03), контроллер 10a помощи при парковке изменяет угол (θM) ориентации транспортного средства в позиции, в которой направление движения меняется на противоположное (S07), и определяет то, пересекается или нет передний участок транспортного средства с помехой рядом с проездом для транспортного средства в направлении ширины в позиции (Pb), в которой направление движения меняется на противоположное, на маршруте, сформированном на основе измененного угла (θM) ориентации (S03). Формирование маршрута, определение пересечения и изменение угла ориентации в силу этого могут многократно выполняться. Соответственно, можно искать углы (θM) ориентации и формировать маршрут без пересечения.
[0068] Схема 25 поиска целевых позиций для парковки ищет целевые позиции (Pc) для парковки на месте (G) для парковки на основе ширины (WR) проезда для транспортного средства, чтобы обеспечивать формирование маршрута, на котором передний участок транспортного средства не пересекается в позиции (Pb), в которой направление движения меняется на противоположное, с помехой (Ob1) рядом с проездом для транспортного средства в направлении ширины. Целевые позиции (Pc) для парковки могут перемещаться из одной в другую посредством поиска целевых позиций (Pc) для парковки на основе ширины (WR) проезда. Преимущество, аналогичное преимуществу в случае, если ширина (WR) проезда для транспортного средства увеличивается, может в силу этого получаться при формировании маршрутов. Маршрут, на котором транспортное средство не пересекается с помехами около проезда для транспортного средства, может за счет этого формироваться также в окружении, в котором ширина проезда для транспортного средства является небольшой.
[0069] Второй вариант осуществления
В первом варианте осуществления, приводится описание примера помощи при парковке с акцентированием внимания на ширине (WR) проезда для транспортного средства, к которому обращено место (G) для парковки. Во втором варианте осуществления, как проиллюстрировано на фиг. 15, приводится описание устройства и способа помощи при парковке, которые формируют маршрут, на котором транспортное средство не пересекается с помехами (Ob1, Ob2, Ob3), с учетом не только ширины (WR) проезда для транспортного средства, но также и глубины проезда для транспортного средства (глубины E проезда для транспортного средства).
[0070] Устройство помощи при парковке ищет углы (θM) ориентации и целевые позиции (Pc) для парковки на основе не только ширины (WR) проезда для транспортного средства, но также и глубины (E) проезда для транспортного средства. В этом случае, устройство помощи при парковке ищет углы (θM) ориентации и целевые позиции (Pc) для парковки, чтобы обеспечивать формирование маршрута, на котором транспортное средство не пересекается с помехами около проезда для транспортного средства.
[0071] Как проиллюстрировано в части (b) по фиг. 3, несколько схем обработки информации, реализованных посредством контроллера 10b помощи при парковке согласно второму варианту осуществления, включают в себя, в дополнение к схемам (21-25), проиллюстрированным в части (a) по фиг. 3, схему 26 получения глубины проезда для транспортного средства, которая получает глубину (E) проезда для транспортного средства.
[0072] Схема 26 получения глубины проезда для транспортного средства вычисляет глубину (E) проезда для транспортного средства, проиллюстрированную на фиг. 15, на основе позиций и направлений помех (включающих в себя другие транспортные средства и стены) и сигнальных линий дорожной разметки около транспортного средства, которые распознаются посредством схемы 21 формирования маршрутов. "Глубина (E) проезда для транспортного средства" указывает расстояние от целевой позиции (Pc) для парковки до конца проезда для транспортного средства в направлении, перпендикулярном ширине (WR) проезда для транспортного средства. Схема 26 получения глубины проезда для транспортного средства получает позиции и направления помех (включающих в себя другие транспортные средства и стены) и сигнальные линии дорожной разметки около транспортного средства из схемы 21 формирования маршрутов. Схема 26 получения глубины проезда для транспортного средства может вычислять глубину (E) зоны возможности движения транспортного средства (проезда для транспортного средства), на основе позиций и направлений помех (включающих в себя другие транспортные средства и стены) и сигнальных линий дорожной разметки около транспортного средства. Как и следовало ожидать, схема 26 получения глубины проезда для транспортного средства может получать информацию относительно глубины проезда для транспортного средства из инфраструктуры, вместе с информацией относительно открытого пространства для парковки.
[0073] Схема 24 поиска углов ориентации ищет углы (θM) ориентации транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное, на основе ширины проезда для транспортного средства и глубины проезда для транспортного средства, чтобы обеспечивать формирование маршрута, на котором передний участок транспортного средства не пересекается в позиции (Pb), в которой направление движения меняется на противоположное, с помехами (Ob1, Ob3) рядом с проездом для транспортного средства в направлении ширины и в направлении глубины.
[0074] Схема 24 поиска углов ориентации управляет направлением сканирования углов (θM) ориентации в зависимости от глубины (E) проезда для транспортного средства и ширины (WR) проезда для транспортного средства. Когда глубина (E) проезда для транспортного средства является небольшой, угол (θM) ориентации имеет тенденцию быть большим, а когда ширина (WR) проезда для транспортного средства является небольшой, угол (θM) ориентации имеет тенденцию быть небольшим.
[0075] Например, схема 24 поиска углов ориентации может выбирать угол (θM) ориентации таким образом, что чем меньше глубина (E) проезда для транспортного средства, тем больше выбранный угол (θM) ориентации.
[0076] Альтернативно, когда глубина (E) проезда для транспортного средства превышает ширину (WR) проезда для транспортного средства, схема 24 поиска углов ориентации ищет углы (θM) ориентации в позиции (Pb), в которой направление движения меняется на противоположное, в порядке по возрастанию, начиная с нуля. Между тем, когда глубина (E) проезда для транспортного средства равна или меньше ширины (WR) проезда для транспортного средства, схема 24 поиска углов ориентации ищет углы (θM) ориентации в позиции (Pb), в которой направление движения меняется на противоположное, в порядке по убыванию, начиная с угла (θF) ориентации при завершении парковки. Это позволяет уменьшать бесполезное время поиска и добиваться уменьшения нагрузки по обработке информации и быстрого расчета маршрута.
[0077] В качестве другой альтернативы, определение расстояния может выполняться посредством использования пороговых значений, заданных заранее, для глубины (E) проезда для транспортного средства и ширины (WR) проезда для транспортного средства, соответственно. Например, когда глубина (E) проезда для транспортного средства и ширина (WR) проезда для транспортного средства равны или меньше пороговых значений, либо когда только глубина (E) проезда для транспортного средства равна или меньше порогового значения, схема 24 поиска углов ориентации ищет углы (θM) ориентации в порядке по убыванию, начиная с угла (θF) ориентации при завершении парковки. Когда только ширина (WR) проезда для транспортного средства равна или меньше порогового значения, схема 24 поиска углов ориентации ищет углы (θM) ориентации в порядке по убыванию, начиная с угла (θF) ориентации при завершении парковки.
[0078] Схема 25 поиска целевых позиций для парковки ищет целевые позиции (Pc) для парковки на месте (G) для парковки, на основе ширины (WR) проезда для транспортного средства и глубины (E) проезда для транспортного средства. Целевая позиция (Pc) для парковки может перемещаться посредством поиска целевых позиций (Pc) для парковки на основе ширины (WR) проезда для транспортного средства и глубины (E) проезда для транспортного средства. Преимущество, аналогичное преимуществу в случае, если ширина (WR) проезда для транспортного средства увеличивается, может в силу этого получаться при формировании маршрутов. Таким образом, маршрут, на котором транспортное средство не пересекается с помехами около проезда для транспортного средства, может формироваться также в окружении, в котором ширина проезда для транспортного средства является небольшой.
[0079] Ниже описывается процедура формирования маршрутов в способе помощи при парковке второго варианта осуществления со ссылкой на фиг. 16. Процедура формирования маршрутов отличается от процедуры по фиг. 5 тем, что этап S12 предоставляется между этапом S03 и этапом S13.
[0080] На этапе S12, контроллер 10b помощи при парковке определяет то, пересекается или нет передний участок транспортного средства с помехой (Ob3) рядом с проездом для транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное, на сформированном маршруте. В частности, как проиллюстрировано на фиг. 17, контроллер 10b помощи при парковке определяет то, перемещается или нет левый передний участок транспортного средства за пределы проезда для транспортного средства (области возможности движения) и пересекается или нет с помехой (Ob3) в позиции (Pb), в которой направление движения меняется на противоположное. Когда левый передний участок не пересекается ("Нет" на S12), обработка переходит к этапу S13. Когда левый передний участок пересекается ("Да" на S12), обработка переходит к этапу S09. Другие этапы S01 на S21 являются идентичными этапам на фиг. 5, и их описание опускается.
[0081] Со ссылкой на фиг. 17 и 18, приводится описание примеров поиска углов (θM) ориентации посредством схемы 24 поиска углов ориентации и поиска целевых позиций (Pc) для парковки посредством схемы 25 поиска целевых позиций для парковки. Как проиллюстрировано на фиг. 17, целевая позиция (Pc) для парковки сначала определяется, и формирование маршрутов (S01) и определение пересечения (S03) многократно выполняется в то время, когда сканирование углов (θM) ориентации выполняется в порядке по убыванию, начиная с начального значения. Позиции, в которых направление движения меняется на противоположное, при формировании маршрутов, выполненном в сумме шесть раз, обозначаются посредством Pb1, Pb2, Pb3, Pb4,..., Pb6, соответственно. Транспортное средство пересекается с помехами (Ob1, Ob3) во всех позициях (Pb1, Pb2, Pb3, Pb4,..., Pb6), в которых направление движения меняется на противоположное, проиллюстрированных на фиг. 17 ("Да" на S03). Когда угол (θM) ориентации достигает своего предела ("Да" на этапе S05), как проиллюстрировано на фиг. 18, целевая позиция (Pc) для парковки сдвигается в направлении въезда транспортного средства, и новая целевая позиция (Pc') для парковки задается (этап S11).
[0082] Формирование маршрутов (S01) и определение пересечения (S03) многократно выполняется снова в то время, когда сканирование углов (θM) ориентации выполняется в порядке по убыванию, начиная с начального значения. Хотя транспортное средство пересекается с помехой (Ob1) в позициях (Pb1', Pb2'), в которых направление движения меняется на противоположное, транспортные средства не пересекается с помехами (Ob1, Ob3) в позиции (Pb3'), в которой направление движения меняется на противоположное ("Нет" на S12).
[0083] Контроллер 10b помощи при парковке ищет углы (θM) ориентации транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное, на основе ширины (WR) проезда для транспортного средства и глубины (E) проезда для транспортного средства, как описано выше. За счет этого может формироваться маршрут, на котором передний участок транспортного средства не пересекается в позиции (Pb), в которой направление движения меняется на противоположное, с помехами (Ob1, Ob3) рядом с проездом для транспортного средства в направлении ширины и в направлении глубины.
[0084] Во втором варианте осуществления, описанном выше, могут получаться следующие операции и преимущества.
[0085] Схема 24 поиска углов ориентации ищет углы (θM) ориентации транспортного средства в позиции (Pb), в которой направление движения меняется на противоположное, на основе ширины (WR) проезда для транспортного средства и глубины (E) проезда для транспортного средства, чтобы обеспечивать формирование маршрута, на котором передний участок транспортного средства не пересекается в позиции (Pb), в которой направление движения меняется на противоположное, с помехами рядом с проездом для транспортного средства в направлении ширины и в направлении глубины. Маршрут, на котором передний участок транспортного средства не пересекается с помехами (Ob1, Ob3), может за счет этого формироваться, если не только ширина (WR) проезда для транспортного средства, но также и глубина (E) проезда для транспортного средства является небольшой.
[0086] Схема 24 поиска углов ориентации выбирает угол (θM) ориентации таким образом, что чем меньше глубина (E) проезда для транспортного средства, тем больше выбранный угол (θM) ориентации. Таким образом, маршрут, на котором транспортное средство не пересекается с помехами около проезда для транспортного средства, может формироваться также в окружении, в котором глубина (E) проезда для транспортного средства является небольшой.
[0087] Когда глубина (E) проезда для транспортного средства превышает ширину (WR) проезда для транспортного средства, схема 24 поиска углов ориентации выполняет сканирование углов (θM) ориентации в позиции (Pb), в которой направление движения меняется на противоположное, в порядке по возрастанию, начиная с нуля. Когда глубина (E) проезда для транспортного средства равна или меньше ширины (WR) проезда для транспортного средства, схема 24 поиска углов ориентации выполняет сканирование углов (θM) ориентации в позиции (Pb), в которой направление движения меняется на противоположное, в порядке по убыванию, начиная с угла ориентации при завершении парковки.
[0088] Хотя выше описаны варианты осуществления настоящего изобретения, не следует понимать, что описание и чертежи, составляющие часть этого раскрытия сущности, ограничивают настоящее изобретение. Из этого раскрытия сущности, различные альтернативные варианты осуществления, примеры и рабочие технологии должны становиться очевидными для специалистов в данной области техники.
Список номеров ссылок
[0089] 21 - схема формирования маршрутов
22 - схема получения ширины проезда для транспортного средства
23 - схема получения ширины парковки
24 - схема поиска углов ориентации
25 - схема поиска целевых позиций для парковки
26 - схема получения глубины проезда для транспортного средства
E - глубина проезда для транспортного средства
G - место для парковки
Ob1, Ob2, Ob3 - помеха
Pa - начальная позиция для парковки
Pb - позиция, в которой направление движения меняется на противоположное
Pc - целевая позиция для парковки
θM, θF - угол ориентации
WR - ширина проезда для транспортного средства

Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Моторное транспортное средство и способ управления выполнением руления для управляемого колеса

