Результат интеллектуальной деятельности: МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ
Вид РИД
Изобретение
Изобретение относится к механизмам, применяемым в технике для получения заданного движения выходного звена.
Известен кулисно-рычажный механизм для огибания эллипсов [Артоболевский И.И. Механизмы в современной технике. Том И. Рычажные механизмы. Издательство «Наука», гл. редакция физ.-мат. лит-ры, 1971, 1008 с. (стр. 88, механизм No. 1046)]. Недостатком такого механизма является невозможность воспроизведения пространственной кривой, так как механизм выполнен плоским.
Наиболее близким к заявляемому изобретению является механизм для воспроизведения пространственных кривых (Патент RU №2309051 МПК B43L 11/00, опубл. 27.10.2007). Механизм для воспроизведения пространственных кривых включает стойку, кривошип, шатун, выполненный в виде винта, взаимодействующего с гайкой, с жестко установленным на ней элементом, воспроизводящим кривую, и коромысло. Кинематические пары между стойкой и кривошипом, кривошипом и шатуном, стойкой и коромыслом выполнены вращательными с параллельными осями, а кинематическая пара между гайкой и коромыслом выполнена вращательной с осью, перпендикулярной осям остальных вращательных кинематических пар и совпадающей с продольной осью шатуна, образующего винтовую кинематическую пару с гайкой. Всего в механизм входит четыре подвижных звена (n=4) и пять кинематических пар пятого класса (p5=5). Подвижность механизма определяется по формуле [Артоболевский И.И. Теория механизмов. Изд-во «Наука», гл. редакция физ.-мат. лит-ры, 1965, 776 с.]

что гарантирует определенность движения всех звеньев механизма при задании движения единственному ведущему звену, кривошипу. Механизм позволяет воспроизводить пространственную винтовую траекторию с постоянным шагом и криволинейной осью.
Механизм для воспроизведения пространственных кривых принимается за прототип. Недостатком прототипа является то, что выходным звеном в нем является гайка. В связи с тем, что расстояние от вращательной пары шатуна до гайки в процессе работы данного механизма является переменным, это требует выполнения элемента, воспроизводящего пространственную кривую, относительно длинным для того, чтобы исключить пересечение воспроизводимой кривой с шатуном. Вместе с тем, увеличение длины элемента будет приводить к дополнительным инерционным нагрузкам. Также механизм прототипа не позволяет одновременно воспроизводить разные типы пространственных кривых в силу того, что только одно звено механизма - гайка выходит из плоскости движения всех остальных звеньев.
Технической проблемой, решаемой предлагаемым изобретением, является расширение функциональных возможностей прототипа путем введения дополнительных подвижных звеньев, совершающих пространственное движение, и установки на них элемента, воспроизводящего пространственные кривые.
Сущность заявляемого изобретения заключается в том, что предлагается механизм для вычерчивания пространственных кривых, включающий стойку, кривошип, шатун, выполненный в виде винта, взаимодействующего с гайкой, коромысло и элемент, воспроизводящий пространственную кривую, причем кинематические пары между стойкой и кривошипом, кривошипом и шатуном, стойкой и коромыслом выполнены вращательными с параллельными осями, а кинематическая пара между гайкой и коромыслом выполнена с осью вращения, перпендикулярной этим осям, при этом, механизм снабжен дополнительным коромыслом, образующим со стойкой сферическую кинематическую пару, и выходным звеном, входящим в поступательную кинематическую пару с дополнительным коромыслом, причем выходное звено жестко соединено с элементом, воспроизводящим пространственную кривую, и образует двухподвижную кинематическую пару со стержнем, жестко установленным на гайке.
Технический эффект, получаемый при реализации изобретения, заключается в расширении функциональных возможностей, а именно, появляется возможность воспроизведения пространственной кривой, которая не будет пересекаться с подвижными звеньями механизма в процессе его работы.
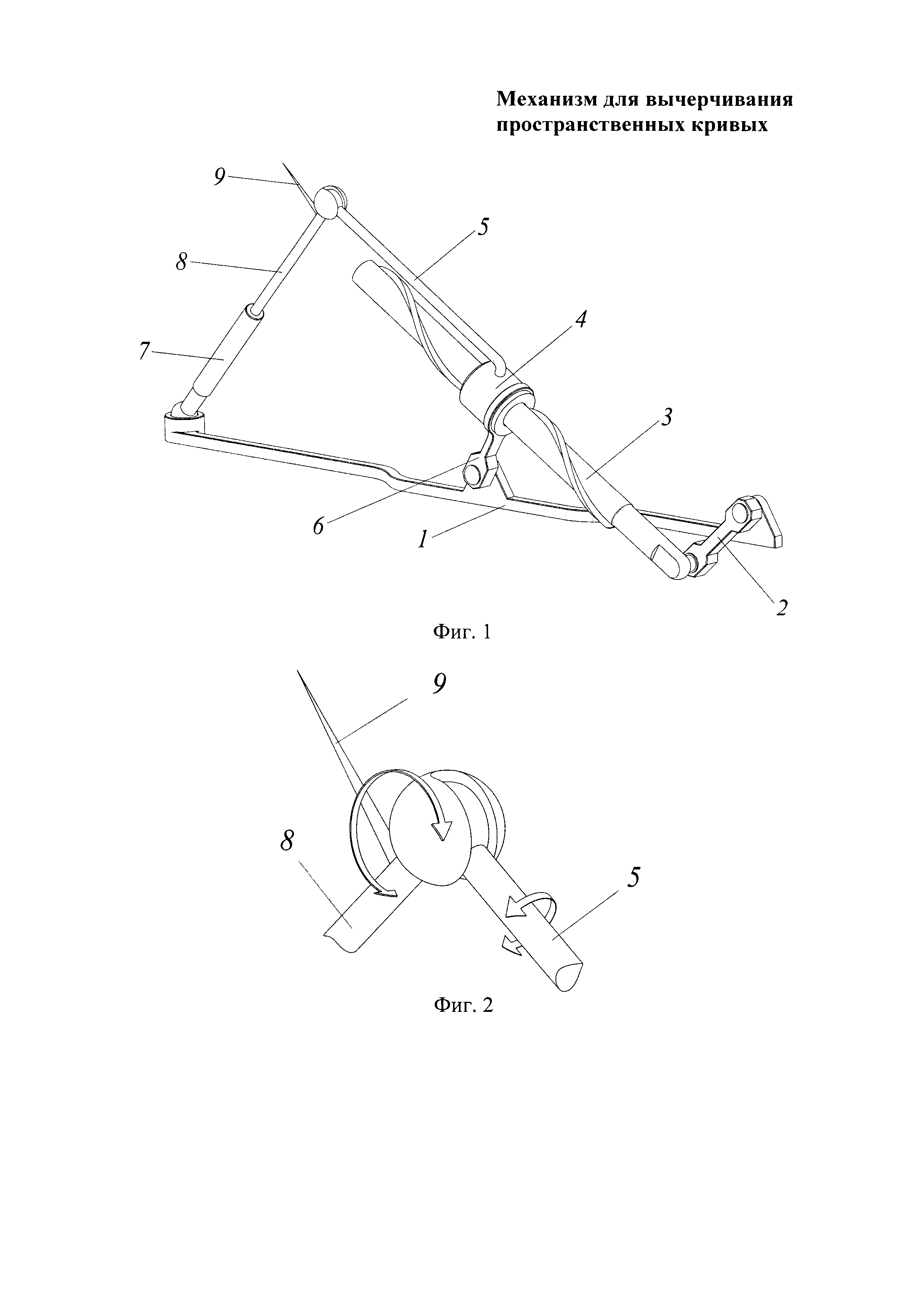
На фиг. 1 показан механизм для вычерчивания пространственных кривых. На фиг. 2 показана двухподвижная сферическая кинематическая пара.
Механизм для вычерчивания пространственных кривых состоит из неподвижного звена - стойки 1, кривошипа 2, шатуна 3, выполненного в виде винта, гайки 4 с жестко установленным на ней стержнем 5, коромысла 6, дополнительного коромысла 7, выходного звена 8 и элемента 9, воспроизводящего пространственную кривую, и жестко установленного на выходном звене 8.
Кинематические пары между стойкой 1 и кривошипом 2, кривошипом 2 и шатуном 3, стойкой 1 и коромыслом 6 выполнены вращательными с параллельными осями. Кинематическая пара между гайкой 4 и коромыслом 6 выполнена вращательной с осью, перпендикулярной осям остальных вращательных кинематических пар и совпадающей с продольной осью шатуна 3, образующего винтовую кинематическую пару с гайкой 4. Кинематическая пара между стойкой 1 и дополнительным коромыслом 7 выполнена сферической, между дополнительным коромыслом 7 и выходным звеном 8 выполнена поступательной, между выходным звеном 8 и стержнем 5 выполнена двухподвижной с двумя относительными вращениями.
Подвижность механизма определяется следующим образом. Так как в состав механизма входят две кинематических цепи (звеньев 1-6 и звеньев 7-9), их подвижность определяется независимо друг от друга. Подвижность звеньев 1-6 вычисляется по формуле (1) и равна W=1, а подвижность звеньев 7-9 определится по формуле Малышева А.П. Кинематическая цепь звеньев 7-9 имеет n=2, р5=1, р4=1 и p3=1, тогда ее подвижность будет равна

Тогда суммируя результаты, полученные по формулам (1) и (2), определим, что механизм обладает одной степенью подвижности W=1. В нем движение задается кривошипу 1, являющемуся ведущим звеном.
Принцип работы механизма заключается в следующем. Задавая вращение кривошипу 2, шатун 3 начнет вкручиваться в гайку 4, тем самым, приводя ее в движение. При этом длина между кинематическими парами 2-3 и 3-4 будет переменной. Стержень 5, жестко соединенный с гайкой 4, передаст движение выходному звену 8 через кинематическую пару звеньев 5-8. Выходное звено 8, ориентируемое в пространстве стержнем 5 и дополнительным коромыслом 7, будет направлять элемент 9, воспроизводящий кривую, по заданной пространственной траектории.
Изобретение позволяет воспроизводить пространственные кривые, которые не будут пересекаться с подвижными звеньями механизма в процессе его работы. Применение механизма целесообразно при обработке внутренних поверхностей различной кривизны, лазерной резки, воспроизведении пространственных кривых, где выходному звену должно быть задано пространственное движение по сложной траектории.
Механизм для вычерчивания пространственных кривых, включающий стойку, кривошип, шатун, выполненный в виде винта, взаимодействующего с гайкой, коромысло и элемент, воспроизводящий пространственную кривую, причем кинематические пары между стойкой и кривошипом, кривошипом и шатуном, стойкой и коромыслом выполнены вращательными с параллельными осями, а кинематическая пара между гайкой и коромыслом выполнена с осью вращения, перпендикулярной этим осям, отличающийся тем, что механизм снабжен дополнительным коромыслом, образующим со стойкой сферическую кинематическую пару, и выходным звеном, входящим в поступательную кинематическую пару с дополнительным коромыслом, причем выходное звено жестко соединено с элементом, воспроизводящим пространственную кривую, и образует двухподвижную кинематическую пару со стержнем, жестко установленным на гайке.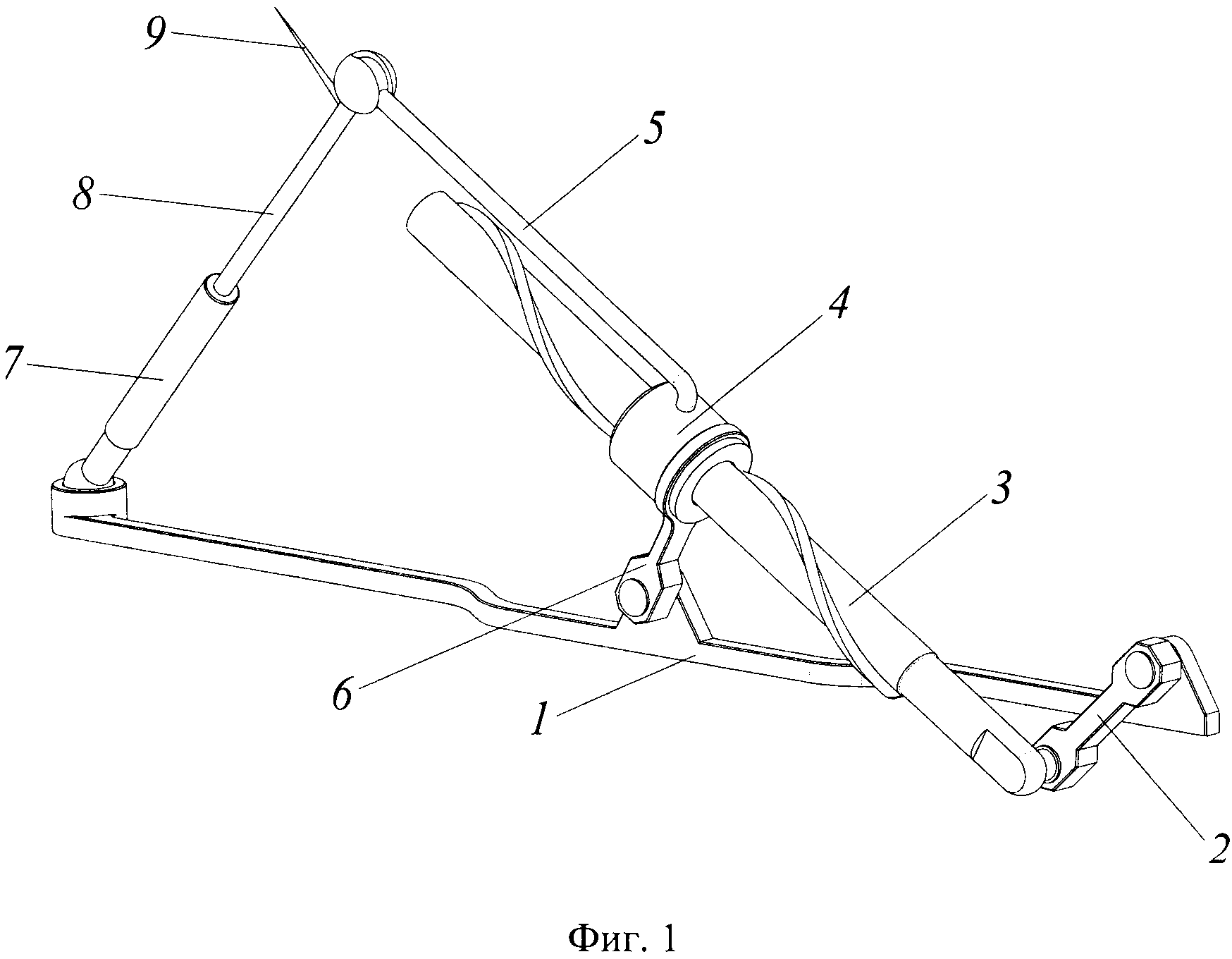
Машина для контактной стыковой сварки
Винторычажный смесительный механизм
Способ получения сырьевой смеси для декоративной строительной керамики
Режущая пластина бурового резца
Порошковая проволока
Способ нанесения износостойких покрытий на основе алюминия и оксида иттрия на силумин
Способ очистки газов от пыли
Способ нанесения биоинертных покрытий на основе титана, ниобия, циркония и азота на титановые имплантаты
Порошковая проволока
Модульная робототехническая технологическая установка
Механизм с тремя степенями свободы
Пространственный четырехзвенный механизм
Трехподвижная кинематическая пара
Пространственный механизм с шестью степенями свободы
Пространственный механизм
Двухподвижная кинематическая пара
Пространственный механизм с тремя степенями свободы
Пространственный механизм с четырьмя степенями свободы
Пространственный механизм с шестью степенями свободы

