Результат интеллектуальной деятельности: Способ бесконтактного измерения угловой ориентации объекта
Вид РИД
Изобретение
Изобретение относится к области измерительной техники и может быть использовано для определения углового положения подвижных объектов при радиолокационных измерениях.
Способы видеоизмерительного определения координат объекта заключаются в обработке отдельных кадров видеопотока, фиксирующих изображение специальных (визирных) меток, закрепленных на исследуемом объекте.
Известно устройство для дистанционного определения координат и углового положения объекта (1 - патент RU 2166735 "Устройство для дистанционного определения координат и углового положения объекта"), в котором на контролируемом объекте закрепляется источник переменного магнитного поля, а определение координат и углового положения объекта осуществляется по измеренным составляющим векторов магнитной индукции.
Известен способ определения углового положения объекта (2 - патент SU 1675668 "Способ определения углового положения объекта"), в котором контроль за положением объекта ведется по отраженному от зеркальной поверхности объекта пучку когерентного излучения.
К недостаткам аналогов можно отнести обязательные конструктивные изменения в исследуемом объекте (размещение источника энергии и измерительных устройств, нанесение светоотражающего покрытия), что приводит к ошибкам при радиолокационных измерениях. Дополнительным источником ошибок при применении данных изобретений на отрытых радиоизмерительных полигонах являются переменные условия освещенности и значительное (до 30 м) удаление объекта исследования от поверхности земли.
Известен способ измерения координат удаленного объекта (3 - патент РФ №2506536 "Способ субпиксельного контроля и слежения за перемещением удаленного объекта"), взятый за прототип. В данном изобретении на контролируемом объекте закрепляется точечный источник с излучением на длине волны в красном спектральном диапазоне (контрольная точка), в точке наблюдения устанавливается видеодатчик с длиннофокусным объективом. Принцип работы способа основан на передаче по оптическому каналу изображения контрольной точки подвижной системы и слежении за смещением этой точки в подвижной системе координат по перемещению ее изображения на матрице видеокамеры в неподвижной системе координат, последующей передаче видеосигнала слежения по каналу связи в электронно-вычислительную машину (ЭВМ), обработке и вычислении смещения разности текущих и первоначальных, записанных в памяти ЭВМ координат центра изображения контрольной точки в подвижной системе координат, определении искомых координат контрольной точки объекта путем использования преобразования координат. Повышение точности определения координат точечного источника достигается за счет определения максимума интенсивности пятна засветки.
Прототип имеет те же недостатки, что и аналоги предлагаемого изобретения. Дополнительным источником ошибок в [3] являются оптические искажения в линзах длиннофокусного объектива видеодатчика.
Предлагаемый способ бесконтактного измерения угловой ориентации объекта устраняет отмеченные недостатки прототипа и позволяет определять угловую ориентацию объекта без внесения изменений в его конструкцию в полевых условиях.
Задачей, на решение которой направлено предлагаемое изобретение, является повышение точности определения углового положения подвижного объекта и устранение ошибок при радиолокационных измерениях.
Для решения указанной задачи предлагается способ бесконтактного измерения угловой ориентации объекта, включающий наблюдение за смещением объекта с помощью видеокамеры и передачу в последующем видеосигнала по каналу связи в ЭВМ.
Согласно изобретению вводят в алгоритм работы этап калибровки для получения калибровочных коэффициентов, используемых для коррекции оптических искажений в линзах длиннофокусного объектива видеокамеры, и размещают на продольной оси исследуемого объекта две квадроцентрические метки, находящиеся в поле зрения видеокамеры. Обрабатывают полученные на ЭВМ видеокадры с целью коррекции оптических искажений, накладываемых длиннофокусным объективом видеокамеры. Также вычисляют позиции и направления вектора угловой ориентации объекта на основе данных о положении и ориентации видеокамеры и по расположению центров квадроцентрических меток на каждом кадре, вычисленных на основе данных о предыдущих положениях центров квадроцентрических меток путем определения оптического потока пирамидальным алгоритмом Лукаса-Канадэ и уточненных с субпиксельной точностью алгоритмом поиска угла Ши-Томази.
Техническим результатом изобретения является получение углового положения объекта, например летательного аппарата, подвешенного на высоте до 30 метров с точностью до 8 угловых минут.
Указанный технический результат достигается за счет введения этапа калибровки, устраняющего оптические искажения в линзах длиннофокусного объектива, а также вычисления координат контрольных точек путем вычисления оптического потока пирамидальным алгоритмом Лукаса-Канадэ и их уточнения с субпиксельной точностью алгоритмом поиска угла Ши-Томази.
Сочетание отличительных признаков и свойств предлагаемого способа из литературы не известно, поэтому он соответствует критериям новизны и изобретательского уровня.
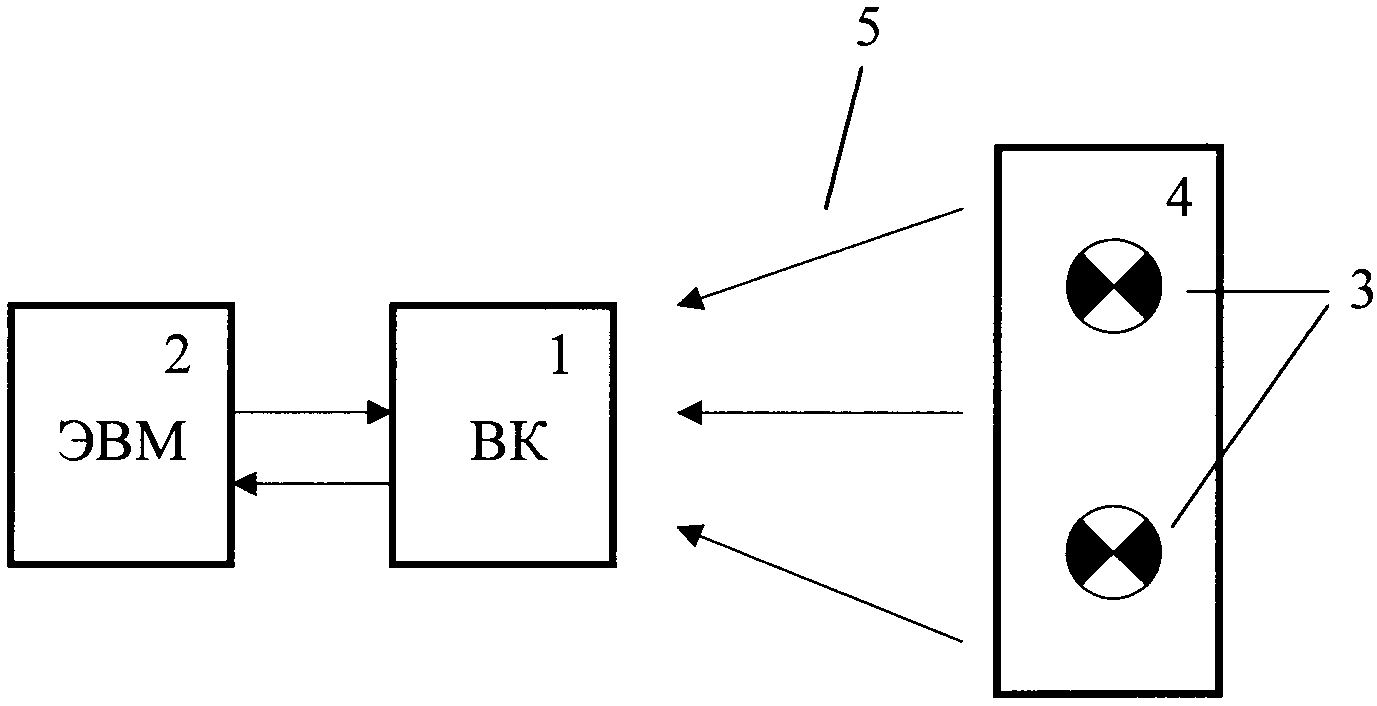
На чертеже изображена схема устройства, реализующего предлагаемый способ бесконтактного измерения угловой ориентации объекта.
При реализации предлагаемого способа выполняется следующая последовательность действий:
- калибровка видеокамеры - 1;
- размещение на продольной оси исследуемого объекта двух квадроцентрических меток - 2;
- наблюдение за смещением объекта с помощью видеокамеры и передача видеосигнала по каналу связи в ЭВМ - 3;
- обработка полученных на ЭВМ видеокадров с целью коррекции оптических искажений, накладываемых длиннофокусным объективом видеокамеры - 4;
- определение координат центров квадроцентрических меток на каждом видеокадре - 5;
- вычисление позиции и направления вектора угловой ориентации объекта относительно направления локации - 6.
Операцию 1 по калибровке видеокамеры проводят с помощью метода Ченгуэ Чанга (Zhengyou Zhang), для этого калибровочную доску поднимают на рабочую высоту и с помощью оттяжек придают ей горизонтальное положение. Зарегистрированный кадр, с изображением калибровочной доски, обрабатывают на ЭВМ с целью получения калибровочных коэффициентов, которые используются в алгоритме измерения угловой ориентации объекта для коррекции оптических искажений кадра. Затем проводят операцию 2 по размещению двух квадроцентрических меток на продольной оси объекта. После чего исследуемый объект поднимают на рабочую высоту таким образом, чтобы квадроцентрические метки были в поле видимости видеокамеры.
Смещение объекта регистрируется с помощью видеокамеры, видеосигнал с которой отправляется по каналу связи в ЭВМ (операция 3).
Текущий кадр, пришедший с видеокамеры, обрабатывается ЭВМ (операция 4) для удаления искажений, накладываемых видеокамерой, с помощью коэффициентов, полученных в результате калибровки.
Операция 5 по измерению координат квадроцентрических меток производится по следующему алгоритму:
1. Проверяется наличие предыдущих координат квадроцентрических меток. Если координаты не определены, то начальные положения квадроцентрических меток, соответствующие координатам их центров, указываются вручную оператором. В противном случае вызывается алгоритм вычисления оптического потока, на вход которому подаются координаты предыдущих положений, текущий и предыдущий кадры. В качестве метода расчета оптического потока используется пирамидальный алгоритм Лукаса-Канадэ. Так как процедура расчета оптического потока и процедура уточнения углов основаны на сравнении интенсивностей изображений в локальном окне вокруг особых точек, то в качестве особых точек используются центры квадроцентрических меток. Тем самым обеспечивается уверенное слежение за положением квадроцентрических меток на изображении. На выходе получают текущие координаты квадроцентрических меток в пикселях.
2. Координаты квадроцентрических меток уточняются с помощью процедуры детектирования углов, которая заключается в применении алгоритма поиска угла Ши-Томази в окрестности центра каждой квадроцентрической метки. Данный шаг необходим для предотвращения срыва слежения за центром квадроцентрической метки, а также приведения вычисленных значений к субпиксельной точности.
3. Текущий кадр сохраняется как предыдущий.
Операция 6 по вычислению вектора угловой ориентации объекта выполняется следующим образом:
1. Выполняется обратное проективное преобразование текущих координат квадроцентрических меток:
рм=М×W×рэ,
где рм - местные координаты квадроцентрических меток;
рэ - экранные координаты квадроцентрических меток;
М - матрица внутренних параметров калибровки видеокамеры;
W=[Rt] - матрица, состоящая из вектора переноса t и матрицы поворота R.
2. Вычисляется вектор продольной оси объекта и координат геометрического центра объекта для каждой видеокамеры:

где (х1; у1) - текущие координаты начала вектора продольной оси;
(х2,у2) - текущие координаты конца вектора продольной оси;
(xc, ус) - координаты геометрического центра.
Вычисляется угол наклона вектора продольной оси объекта относительно оси абсцисс местной системы координат  .
.
Выполняется, расчет угла отклонения от направления локации и получение конечного азимута объекта:

где β - азимут направления локации;
α - угол поворота продольной оси объекта в местной системе координат;
 - угол между направлением локации и продольной осью объекта.
- угол между направлением локации и продольной осью объекта.
Если полученное значение  , то прибавляется 360°.
, то прибавляется 360°.
3. Если направление локации при проведении радиолокационных измерений не совпадает с осью абсцисс местной системы координат, то итоговое значение азимута объекта получается суммированием значения азимута в местной системе координат с углом, образованным осью абсцисс и направлением локации.
Способ бесконтактного измерения угловой ориентации объекта, включающий этапы калибровки видеокамеры и измерения угловой ориентации объекта, реализуется с помощью устройства, которое содержит (чертеж) видеокамеру (ВК) 1 с длиннофокусным объективом, формирующую видеопоток с изображением 5 объекта, электронно-вычислительную машину (ЭВМ) 2, обрабатывающую отдельные кадры видеопотока с изображением и осуществляющую управление видеокамерой 1, и две квадроцентрические метки 3, закрепленные на продольной оси объекта 4.
Устройство работает следующим образом: по команде с ЭВМ 2 видеокамера 1 начинает передачу по оптическому каналу видеопотока с изображением 5, фиксирующего движение объекта 4, на ЭВМ 2 происходит поиск на полученном изображении квадроцентрических меток 3 и вычисление их координат в неподвижной системе координат, затем по полученным координатам происходит определение текущего углового положения исследуемого объекта 4 и угловых поправок относительно направления локации.
Способ бесконтактного измерения угловой ориентации объекта, при котором наблюдают за смещением объекта с помощью видеокамеры и передают в последующем видеосигнал по каналу связи в ЭВМ, отличающийся тем, что вводят в алгоритм работы этап калибровки для получения калибровочных коэффициентов, используемых для коррекции оптических искажений в линзах длиннофокусного объектива видеокамеры, размещают на продольной оси объекта две квадроцентрические метки, находящиеся в поле зрения видеокамеры, обрабатывают полученные на ЭВМ видеокадры с целью коррекции оптических искажений, накладываемых длиннофокусным объективом видеокамеры, определяют координаты центров квадроцентрических меток на каждом видеокадре на основе данных о предыдущих положениях центров квадроцентрических меток путем вычисления оптического потока пирамидальным алгоритмом Лукаса-Канадэ и уточнения полученных координат с субпиксельной точностью алгоритмом поиска угла Ши-Томази, вычисляют позиции и направления вектора угловой ориентации объекта на основе данных о положении и ориентации видеокамеры и по расположению центров квадроцентрических меток на каждом кадре.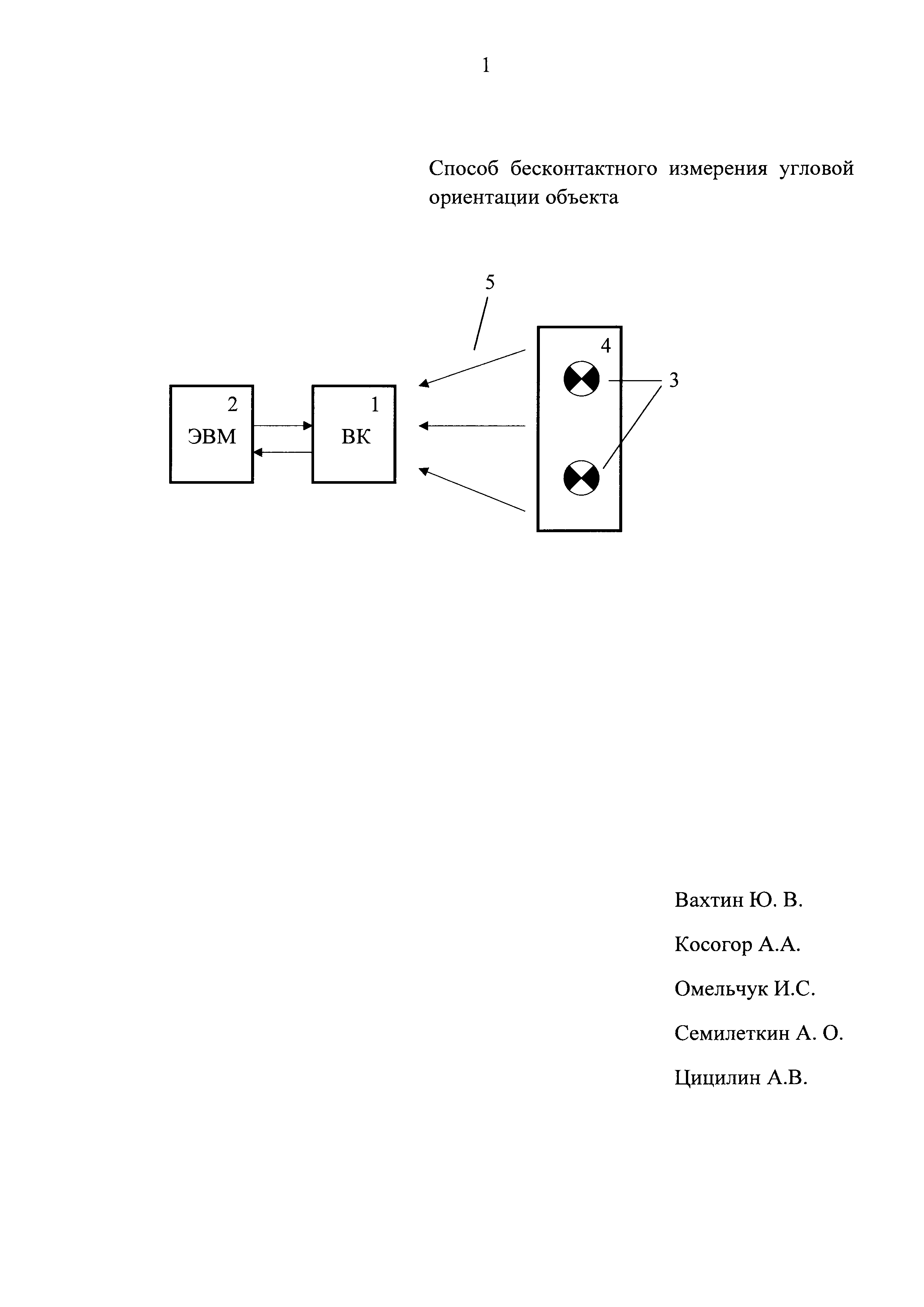
Устройство стабилизации ракеты
Устройство разделения ступеней двухступенчатой ракеты
Способ радиотехнического распознавания излучающих объектов в воздушно-космическом пространстве и устройство для его реализации
Устройство для контроля сварных соединений
Способ и устройство для калибровки приемной активной фазированной антенной решетки
Способ определения механических напряжений в стальных конструкциях магнитным методом контроля
Система подогрева установки с тепловым двигателем
Автоматическое аварийное устройство для остановки прокладываемого подводного кабеля
Способ измерения дальности
Гидравлическая система управления поворотно-сцепным устройством двухзвенной гусеничной машины
Способ обнаружения малых беспилотных летательных аппаратов
Мультисенсорный способ обнаружения беспилотных летательных аппаратов
Мультисенсорный способ обнаружения беспилотных летательных аппаратов
Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса
Уравновешенное опорно-поворотное устройство

