Результат интеллектуальной деятельности: УСТРОЙСТВО НАПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ НАПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству направления транспортного средства и способу направления транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Существует традиционная технология направления транспортных средств по полосам движения, проходящим в одном и том же направлении, которая предназначена для определения уровней загруженности соответствующих полос движения и направления транспортного средства на полосу движения с низким уровнем загруженности.
Список цитируемых источников
Патентная литература
[0003] Патентная литература 1: Публикация заявки на патент Японии № 2011-237329
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0004] Однако, если другое транспортное средство с медленным начальным ускорением, такое как, например, крупногабаритное транспортное средство, останавливается впереди направляемого транспортного средства, тогда на направляемое транспортное средство оказывает влияние транспортное средство с медленным начальным ускорением, и оно вынуждено также начинать движение медленно.
[0005] Следовательно, направляемое транспортное средство может быть неспособно проехать светофор, пока свет остается зеленым, и оно в результате может снова остановиться. Другими словами, может возникать случай, когда трудно увеличивать число транспортных средств, которые проезжают светофор, даже посредством использования технологии для направления транспортного средства на полосу движения с низким уровнем загруженности.
[0006] Настоящее изобретение было реализовано с учетом вышеупомянутой проблемы, и его задача состоит в создании устройства направления транспортного средства и способа направления транспортного средства, которые могут увеличивать число транспортных средств, проезжающих светофор, установленный около множества полос движения, проходящих в одинаковом направлении, пока свет остается зеленым.
[0007] Устройство направления транспортного средства согласно аспекту настоящего изобретения получает характеристики начала движения останавливающихся транспортных средств, которым не удается проехать светофор, пока свет остается зеленым, светофор устанавливается около множества полос движения, проходящих в одинаковом направлении. Устройство направления транспортного средства вычисляет линию одновременного проезда, включающую в себя первую линию и вторую линию. Первая линия указывает задний край транспортного средства в хвосте на первой полосе движения, когда транспортное средство, имеющее характеристику начала движения ниже базовой характеристики начала движения, включено в первую полосу движения, и когда транспортное средство, имеющее характеристику начала движения выше характеристик начала движения транспортных средств на первой полосе движения, включено во вторую полосу движения. Вторая линия указывает задний край в положении остановки транспортного средства на второй полосе движения, которое, как прогнозируется, должно проехать светофор одновременно с транспортным средством в хвосте на первой полосе движения. Устройство направления транспортного средства направляет транспортное средство следом за соответствующим останавливающимся транспортным средством вперед за линию одновременного проезда.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
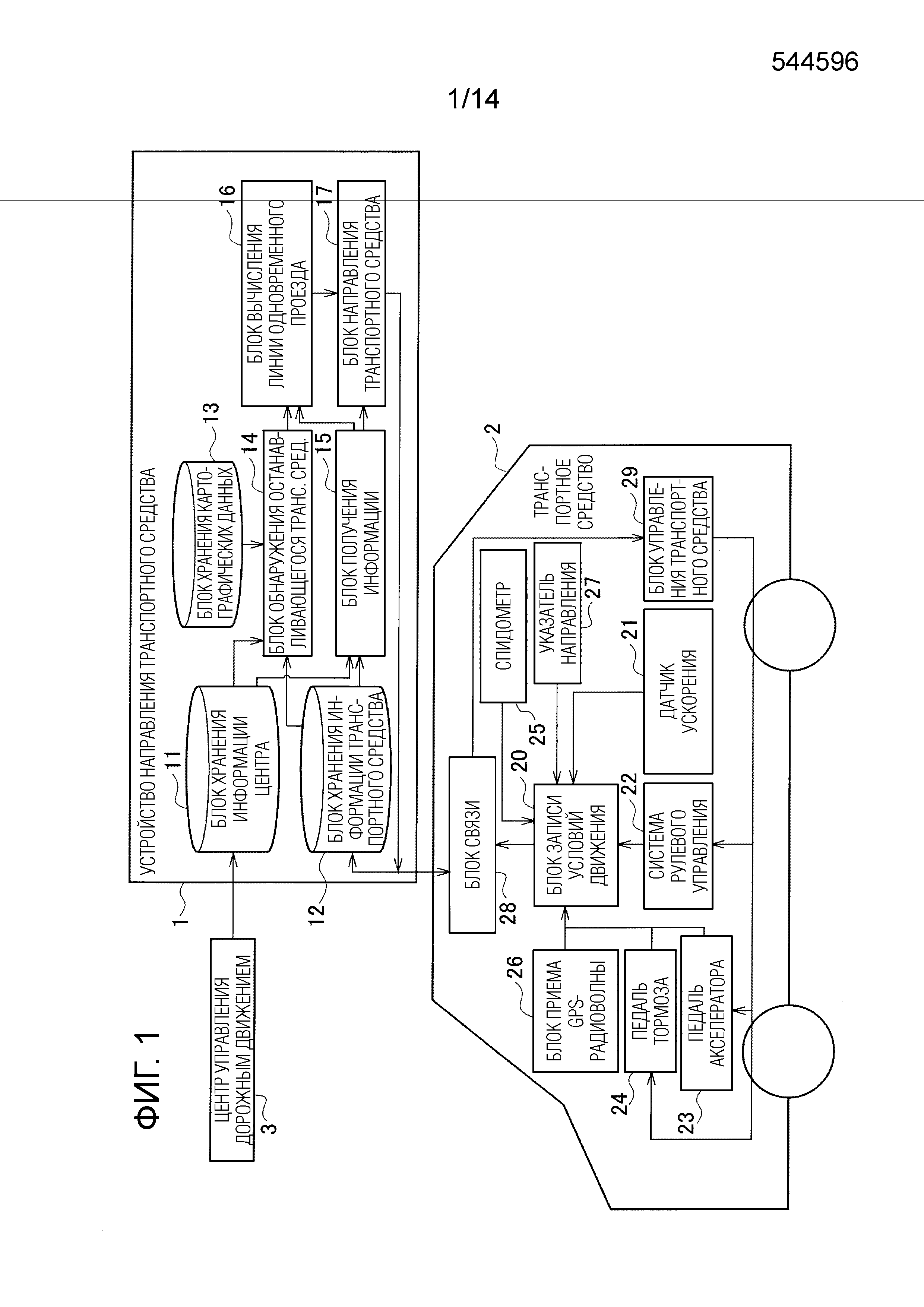
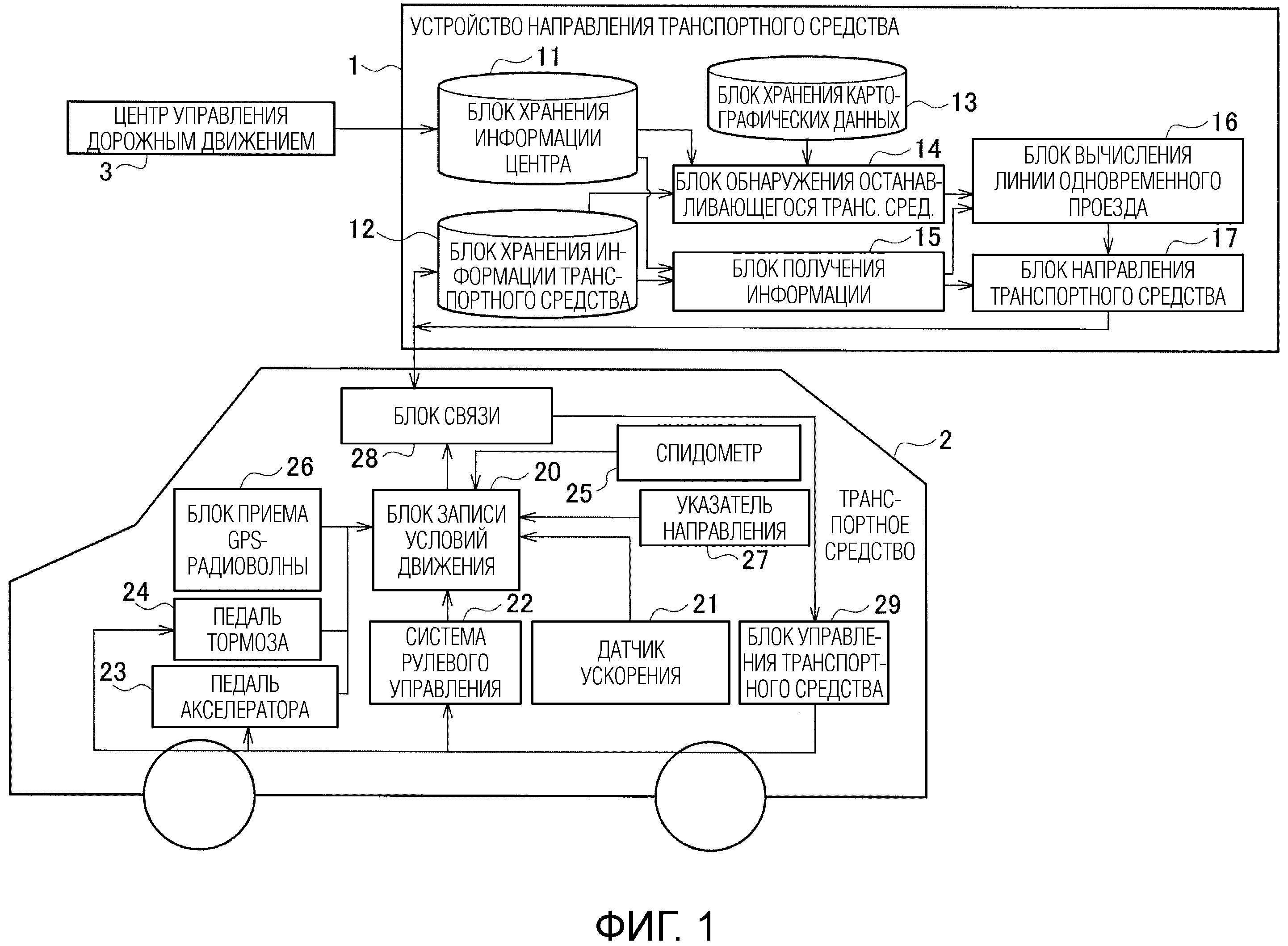
[0008] Фиг. 1 - это схема, показывающая пример полезной формы устройства направления транспортного средства согласно варианту осуществления.
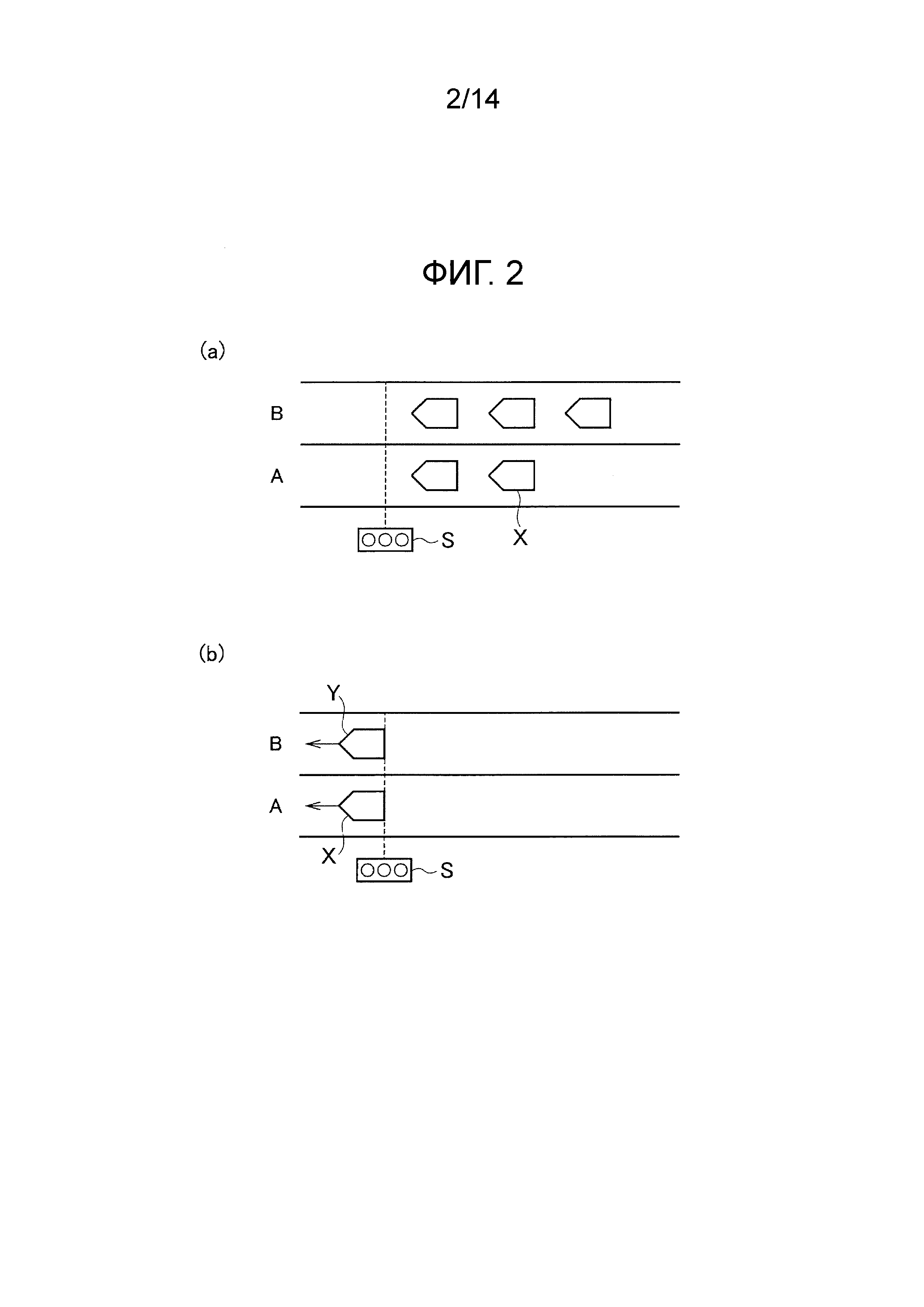
Фиг. 2(a) - это схема, показывающая пример рядов останавливающихся транспортных средств, которым не удается проехать светофор S, пока его свет остается зеленым, а фиг. 2(b) является схемой, показывающей состояние, когда транспортные средства X и Y проезжают через светофор S.
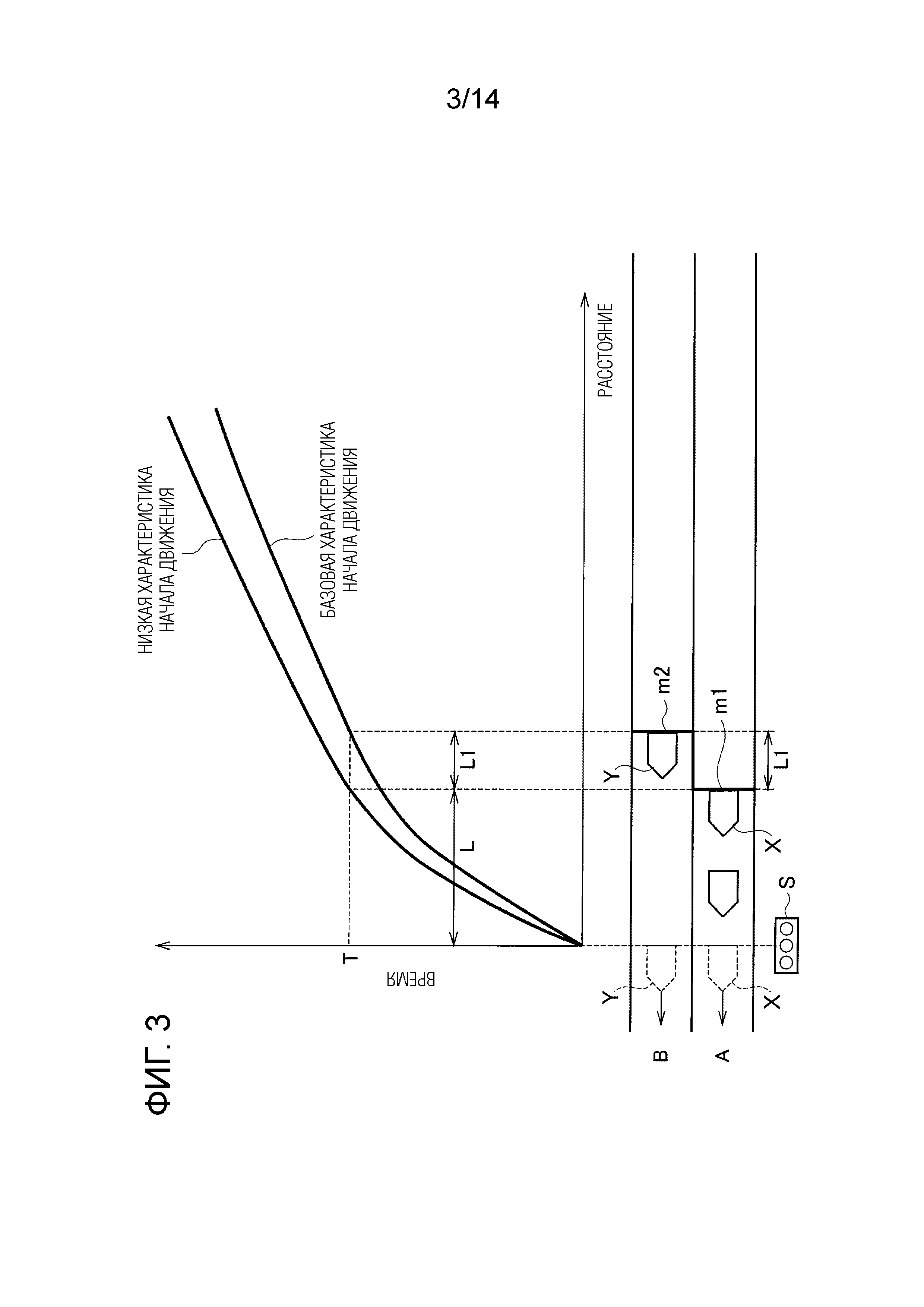
Фиг. 3 - это схема для объяснения линии одновременного проезда.
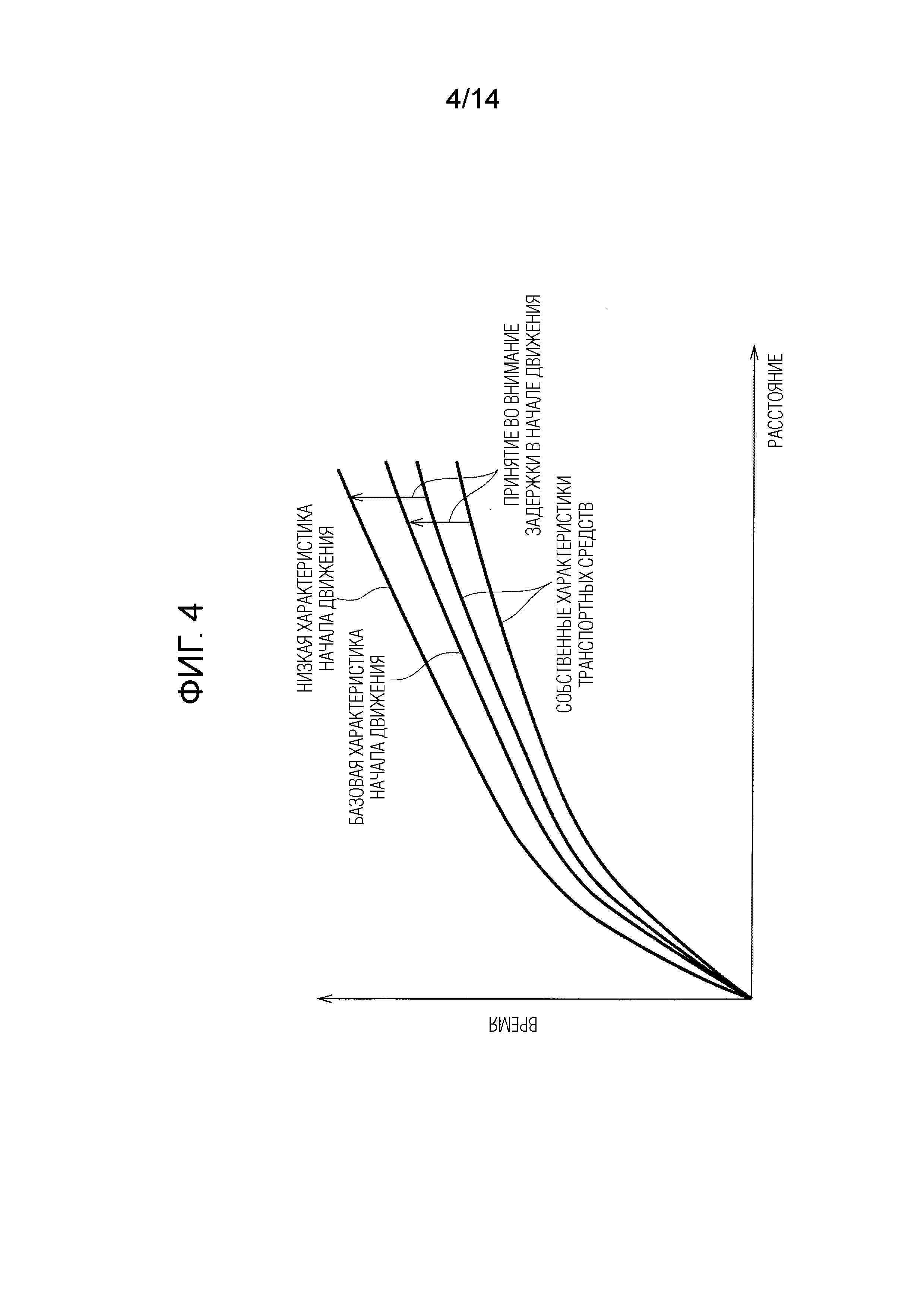
Фиг. 4 - это схема, показывающая собственную базовую характеристику начала движения и низкую характеристику начала движения транспортного средства, а также его базовую характеристику начала движения и низкую характеристику начала движения с учетом задержки в начале движения.
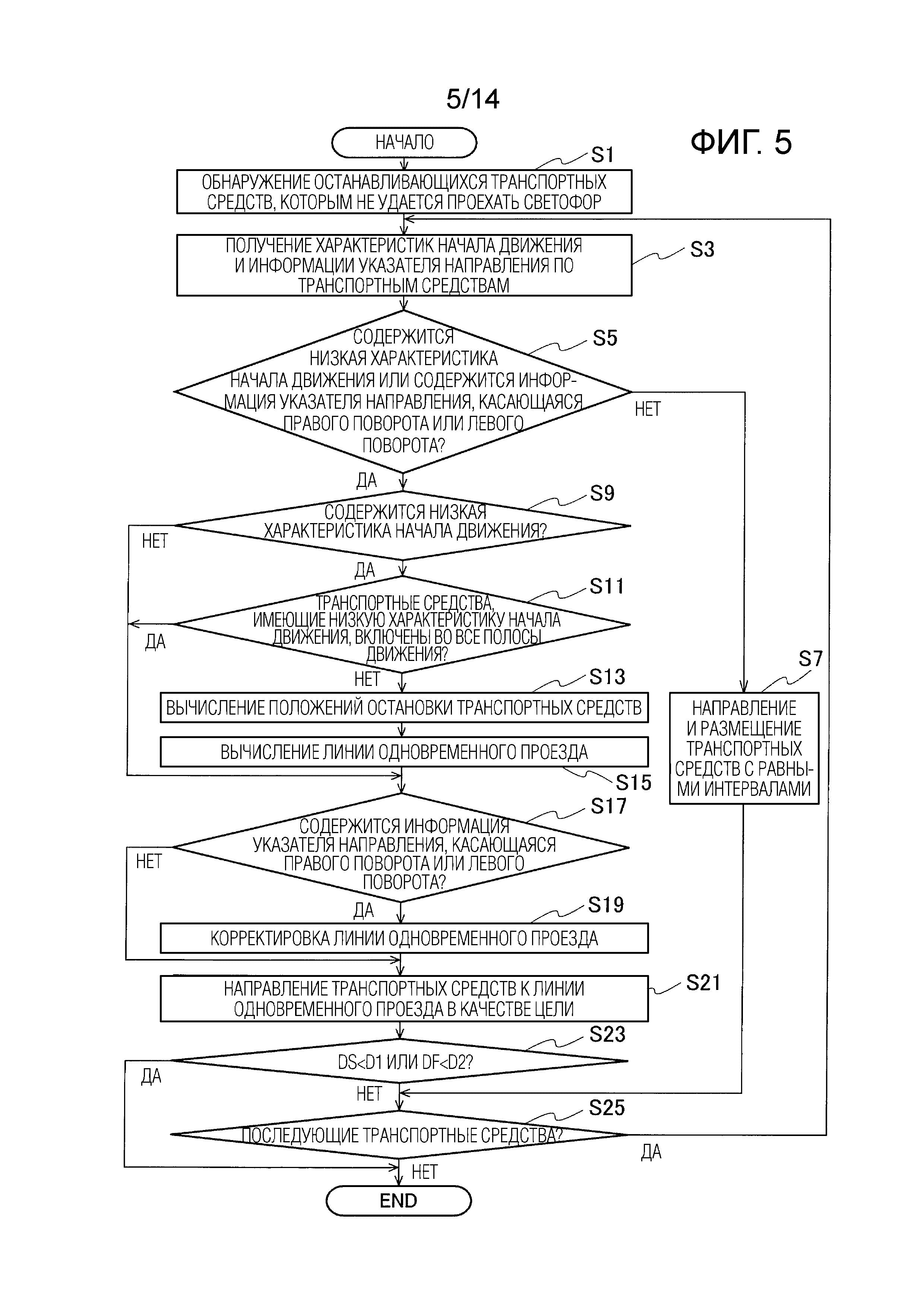
Фиг. 5 - это блок-схема, показывающая последовательность операций для устройства 1 направления транспортного средства.
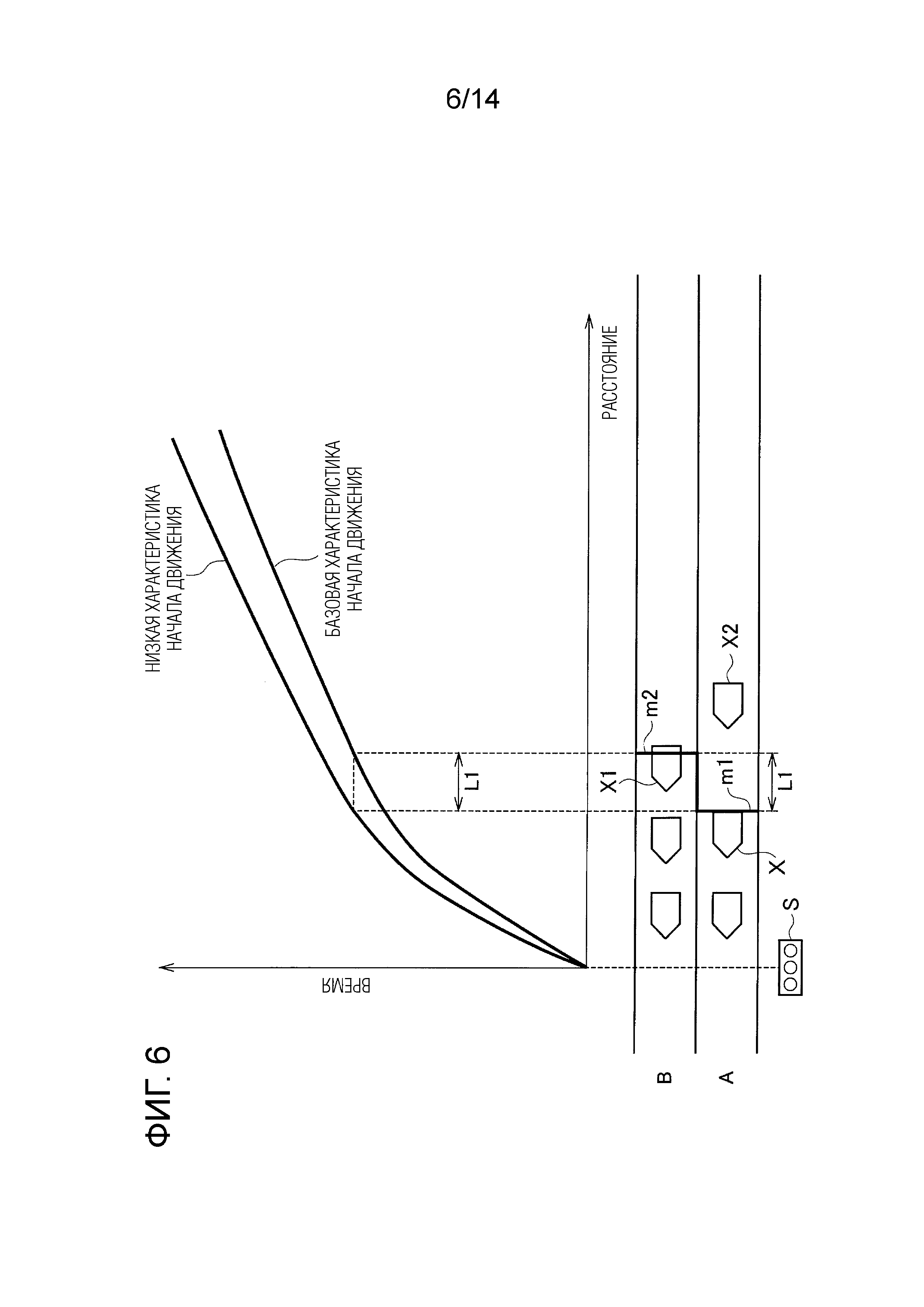
Фиг. 6 - это схема, показывающая состояние, в котором последующее транспортное средство X2 движется по направлению к одному из рядов транспортных средств на фиг. 2(a).
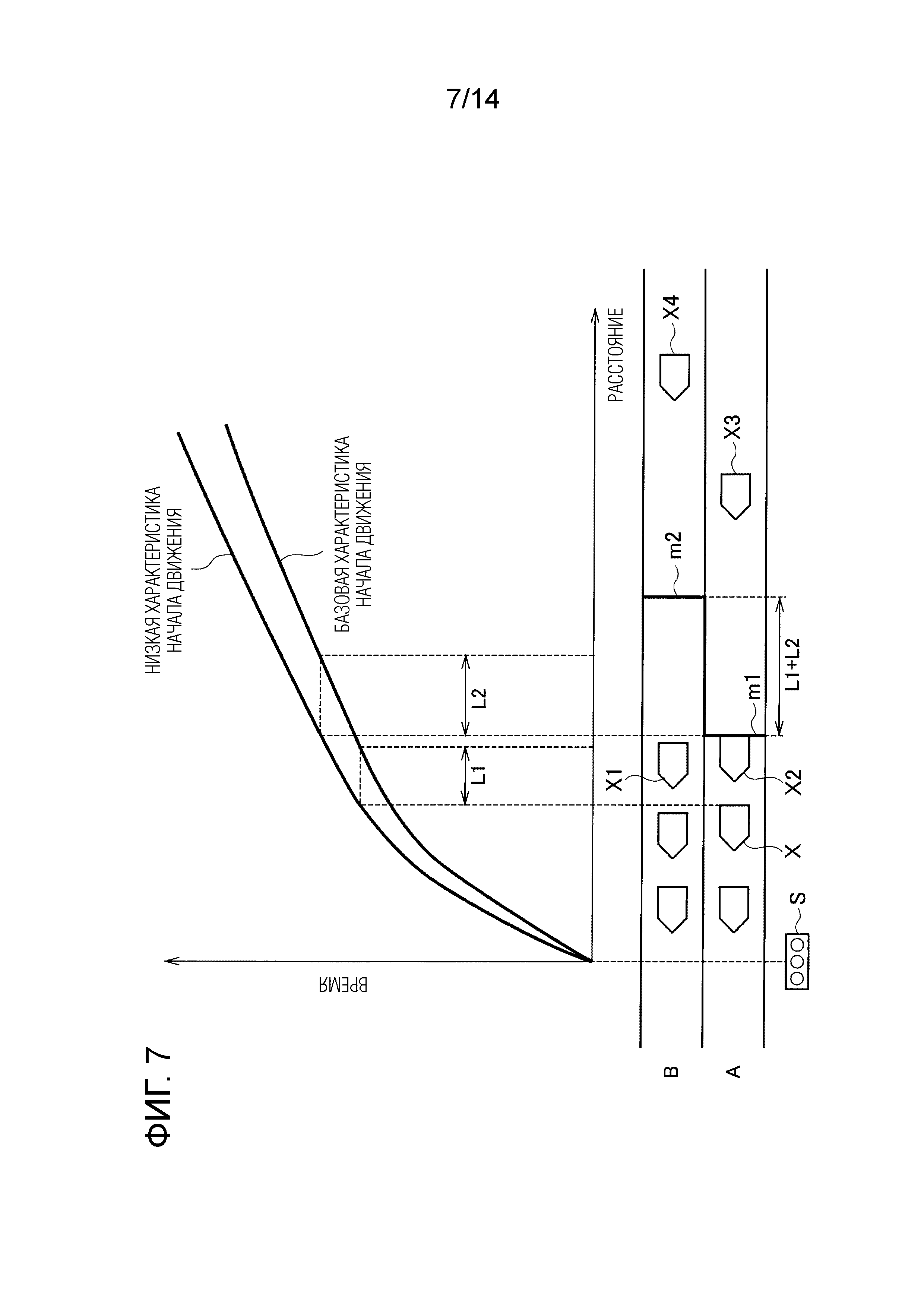
Фиг. 7 - это схема, показывающая состояние, в котором новая линия одновременного проезда вычисляется после направления транспортного средства X2 на фиг. 6, и последующие транспортные средства X3 и X4 едут вместе.
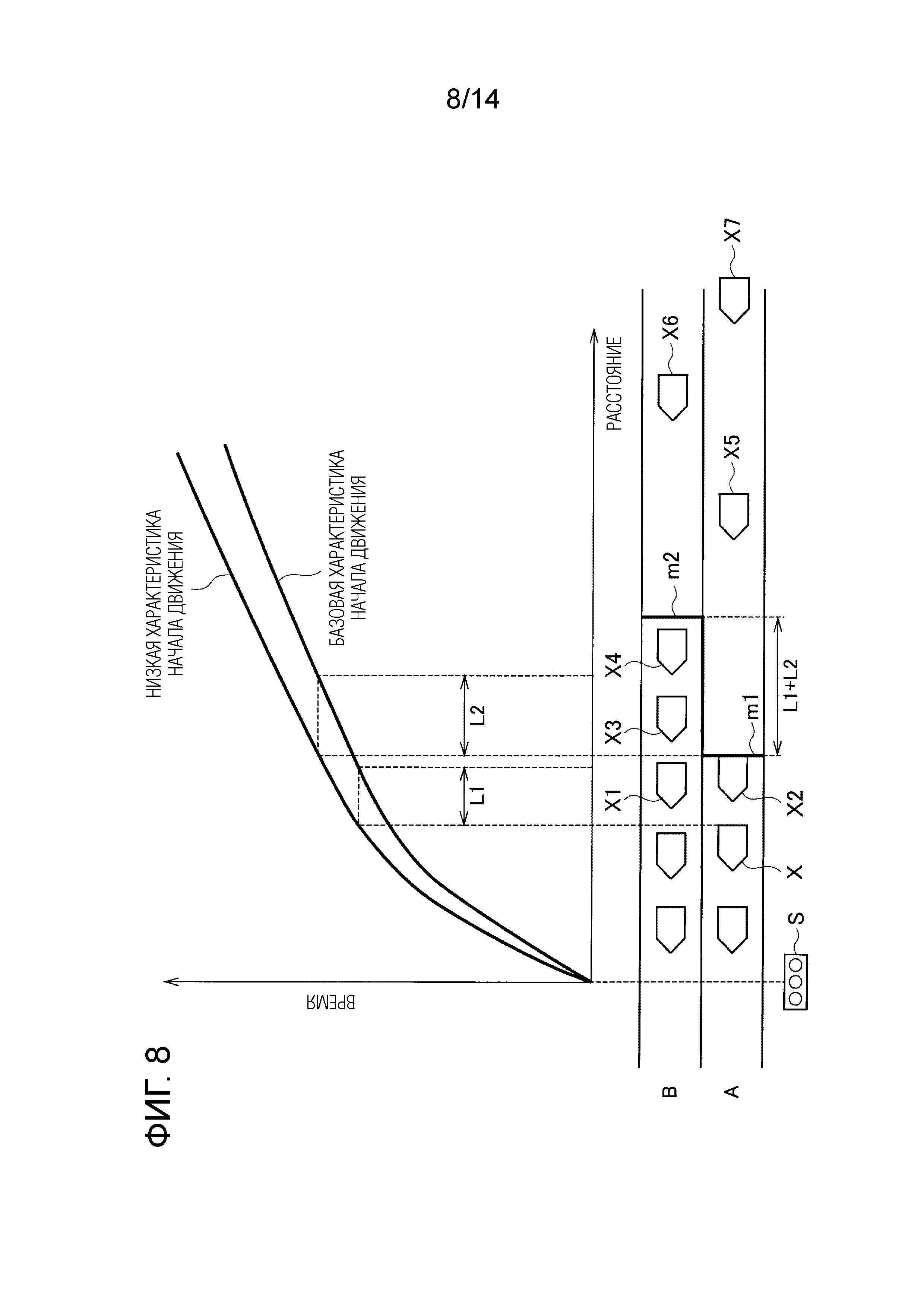
Фиг. 8 - это схема, показывающая состояние, в котором последующие транспортные средства X5, X6 и X7 едут вместе после направления транспортных средств X3 и X4 на фиг. 7.
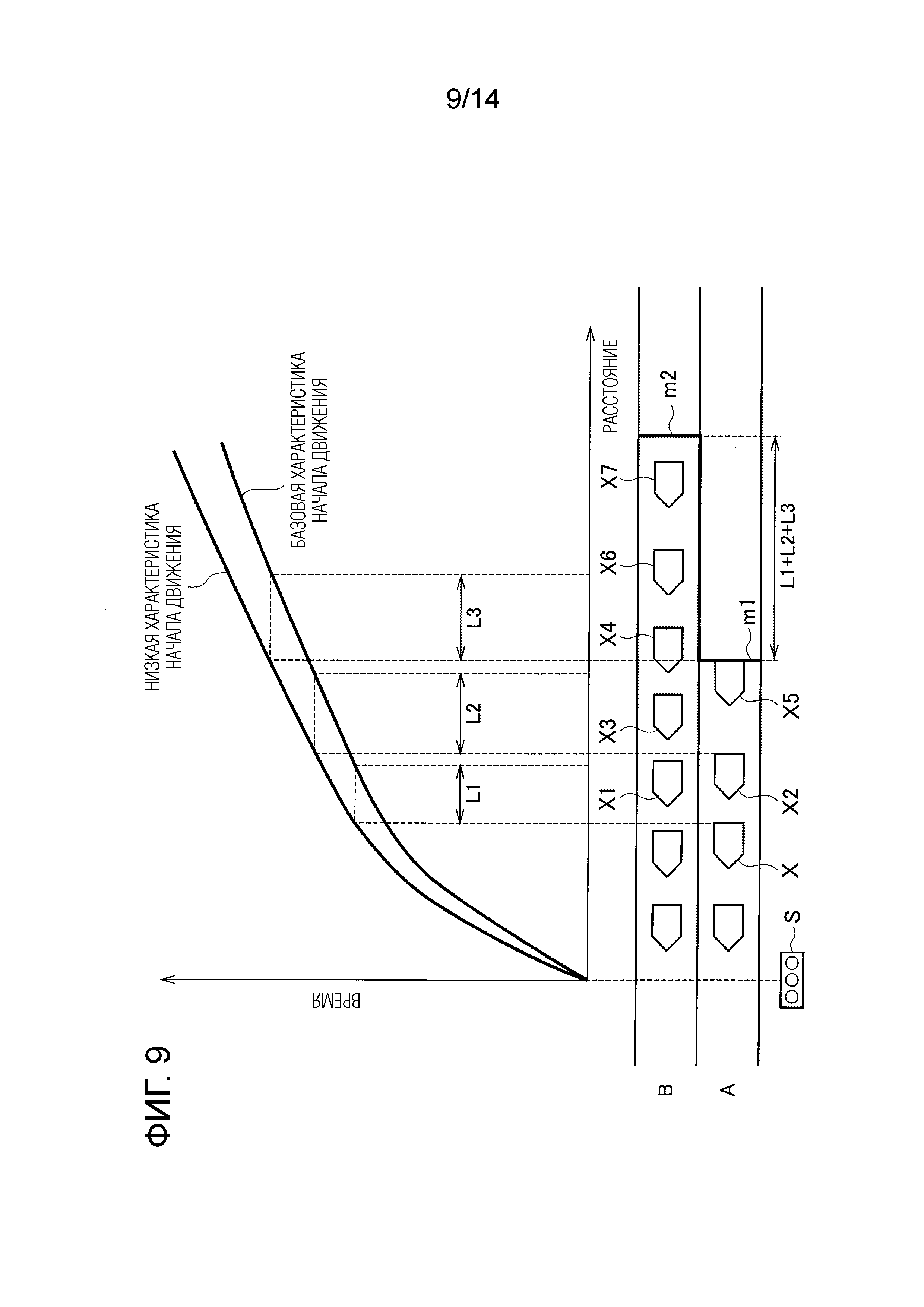
Фиг. 9 - это схема, показывающая состояние, в котором последующие транспортные средства X6 и X7 направляются посредством вычисления новой линии одновременного проезда после направления транспортного средства X5 на фиг. 8.
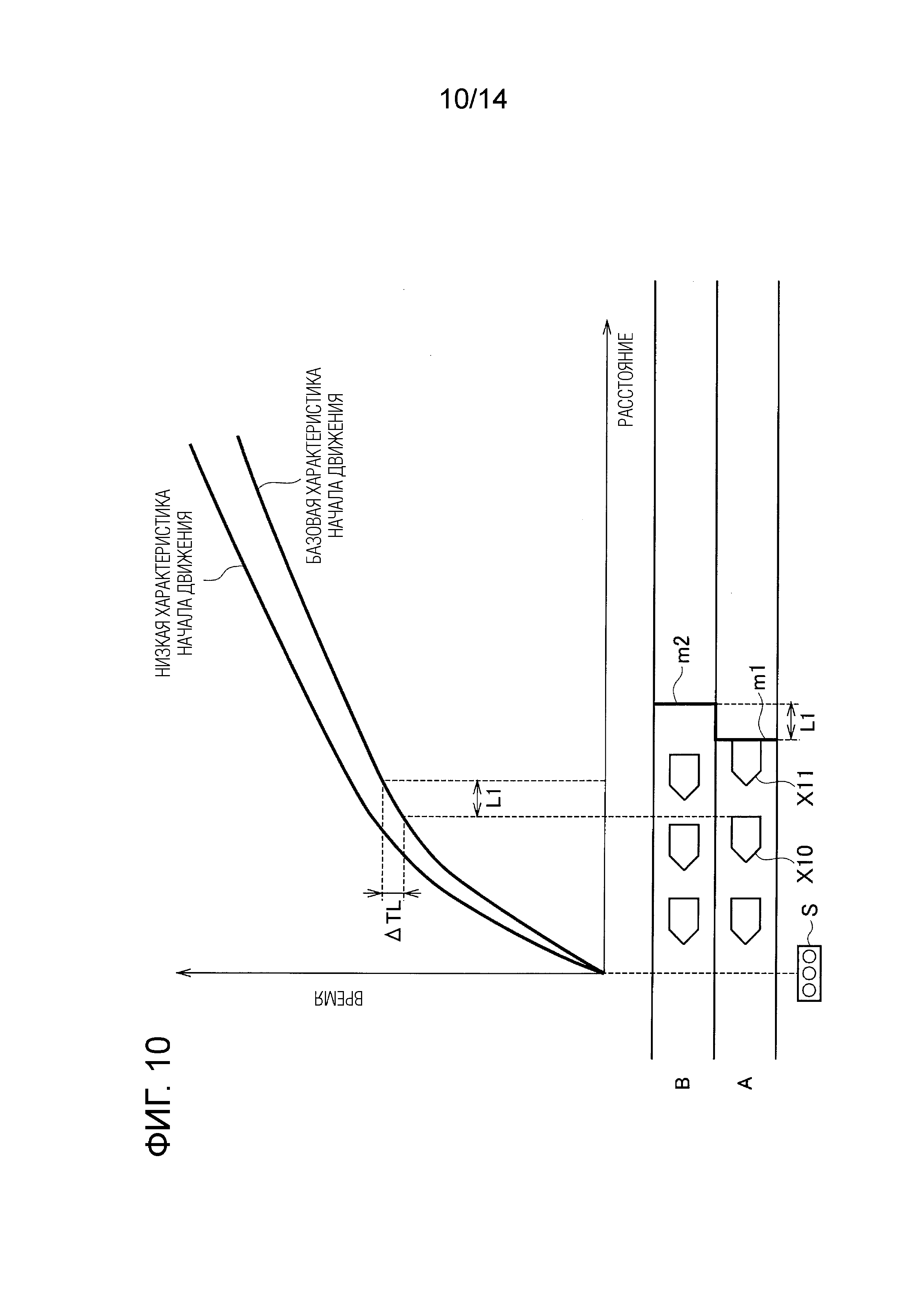
Фиг. 10 - это схема, показывающая ряды транспортных средств, в которых транспортные средства, имеющие низкую характеристику начала движения, не включены в полосы A и B движения, в то время как транспортное средство, выполняющее левый поворот, включено в полосу A движения, и показывающая пример вычисленной линии одновременного проезда.
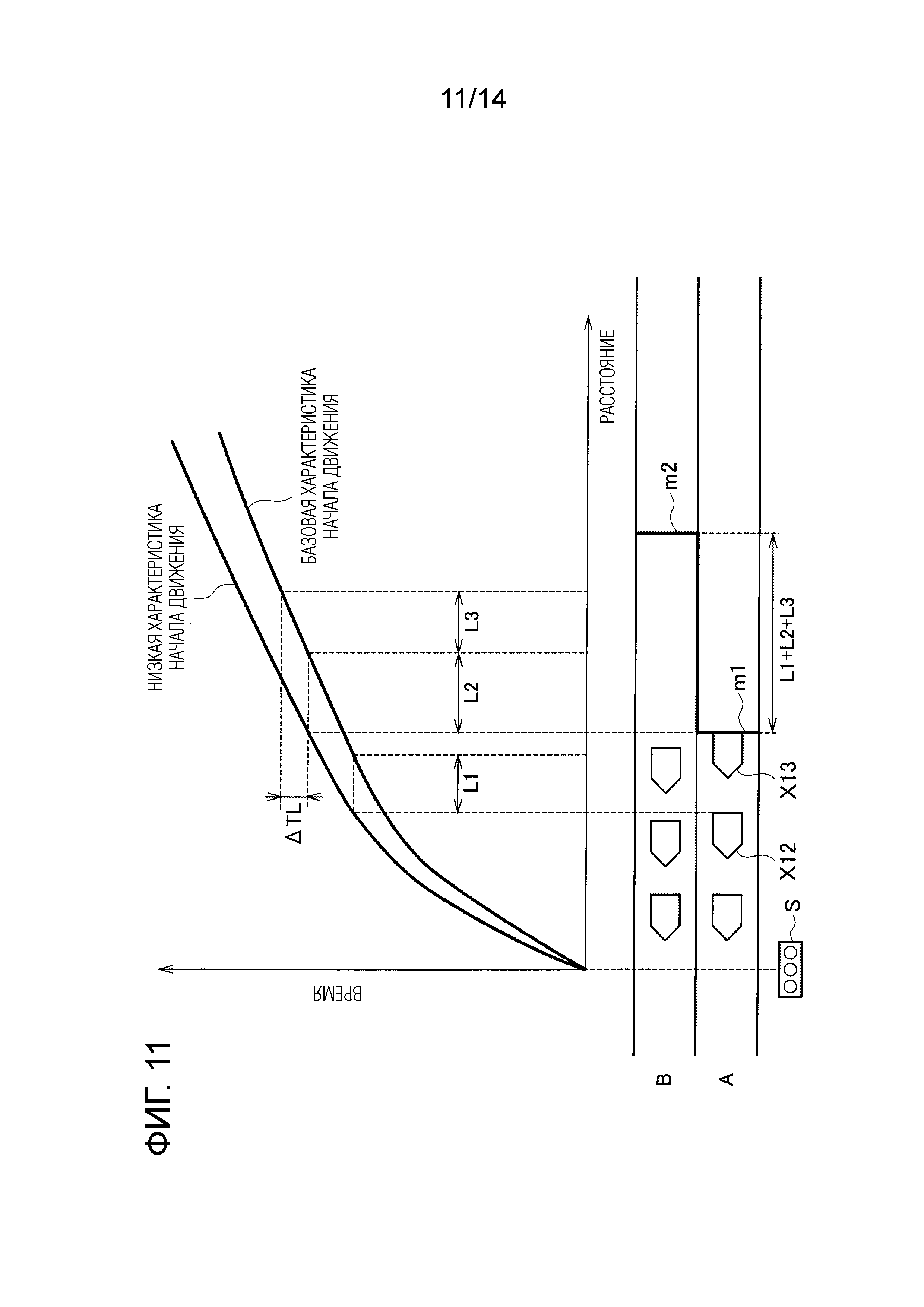
Фиг. 11 - это схема, показывающая ряды транспортных средств, в которых транспортное средство, имеющее низкую характеристику начала движения, транспортное средство, выполняющее левый поворот, включены в полосу A движения, и показывающая пример вычисленной линии одновременного проезда.
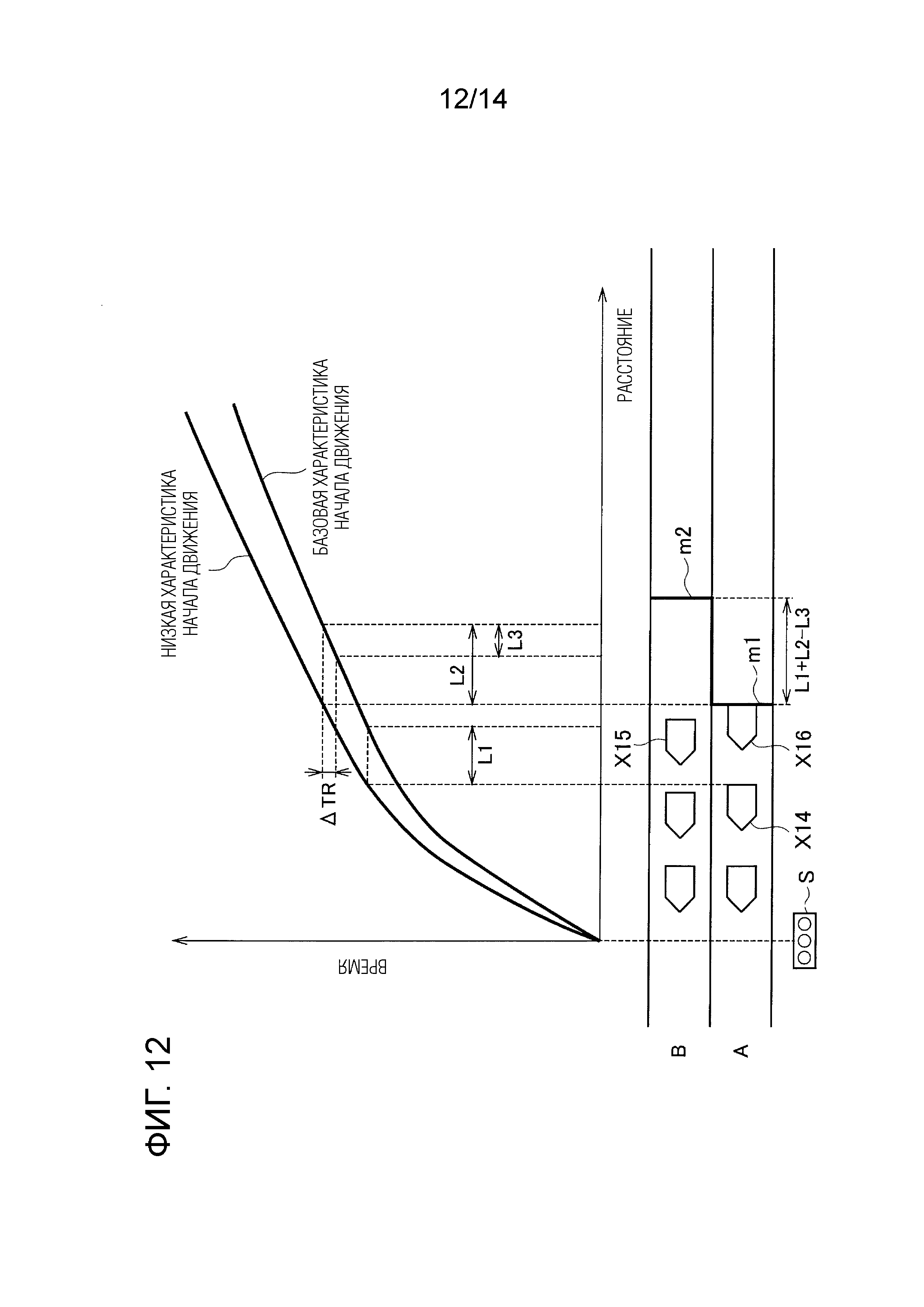
Фиг. 12 - это схема, показывающая ряды транспортных средств, в которых транспортное средство, имеющее низкую характеристику начала движения, включено в полосу A, а транспортное средство, выполняющее правый поворот, включено в полосу B движения, и показывающая пример вычисленной линии одновременного проезда.
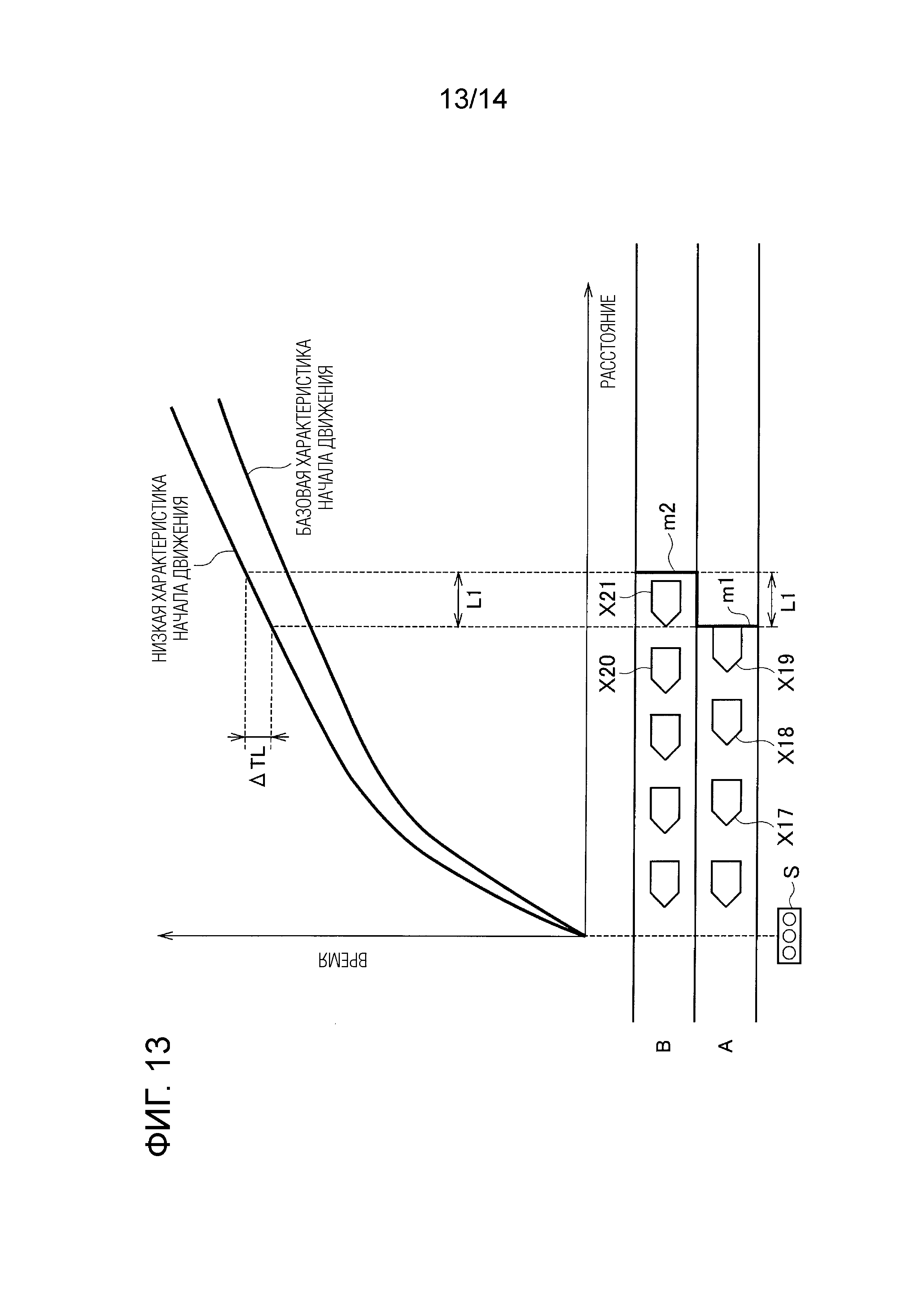
Фиг. 13 - это схема, показывающая ряды транспортных средств, в которых транспортные средства, имеющие низкую характеристику начала движения, включены в полосы A и B движения, в то время как транспортное средство, выполняющее левый поворот, включено в полосу A движения, и показывающая пример вычисленной линии одновременного проезда.
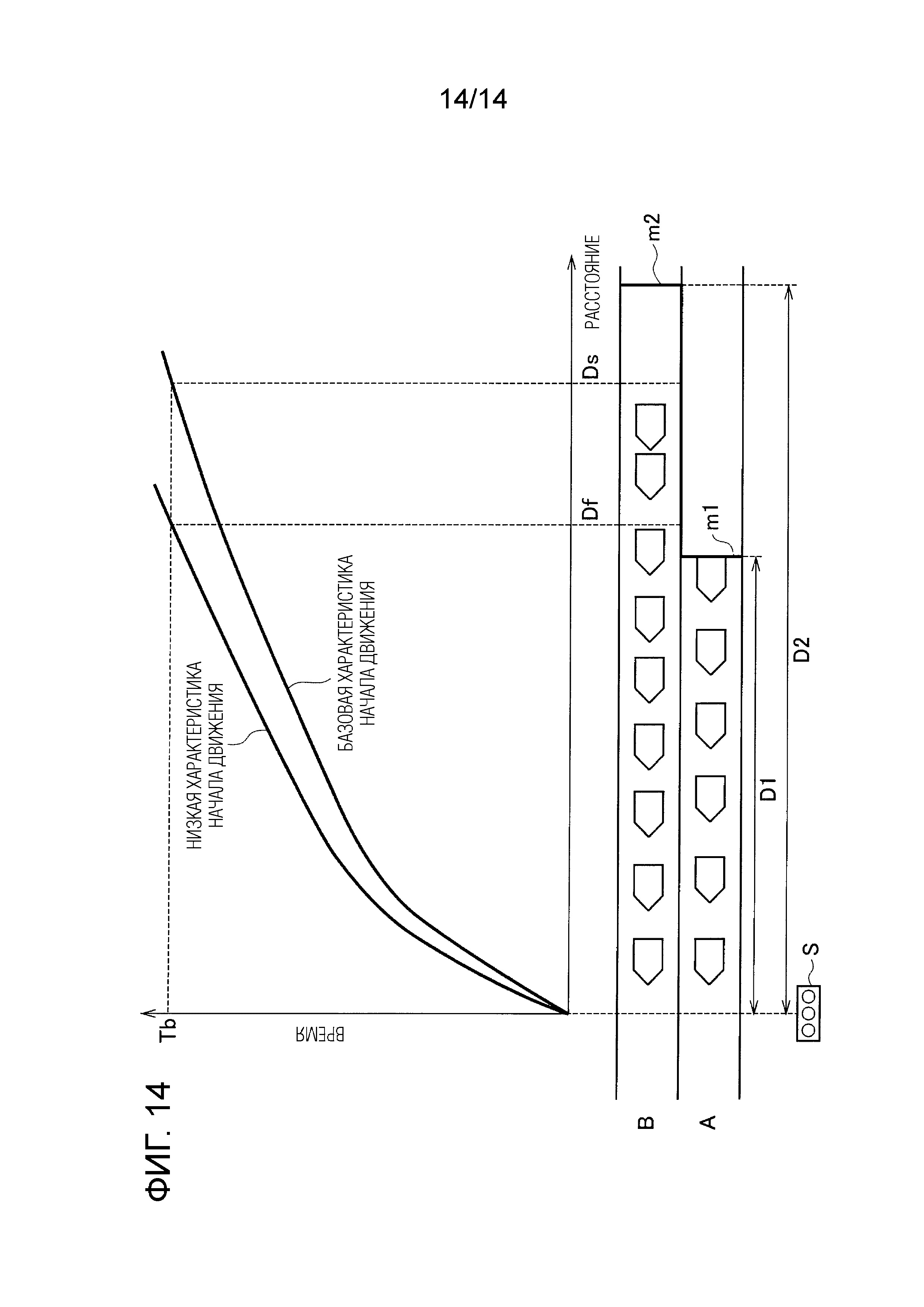
Фиг. 14 - это схема, показывающая пример рядов транспортных средств в случае, когда направление транспортных средств приостанавливается.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0009] Далее будет подробно описан вариант осуществления настоящего изобретения со ссылкой на чертежи. В описании одинаковые компоненты обозначены одинаковыми условными обозначениями, и их повторное объяснение не будет приведено.
[0010] Пример полезной формы устройства направления транспортного средства согласно варианту осуществления будет описан со ссылкой на фиг. 1.
[0011] Устройство 1 направления транспортного средства является устройством, выполненным с возможностью направления транспортного средства 2, и выполнено с возможностью осуществления связи с транспортным средством 2. Транспортное средство 2 на фиг. 1 иллюстрируется как типичный представитель для множества транспортных средств. Кроме того, устройство 1 направления транспортного средства также выполнено с возможностью осуществления связи с серверным устройством в центре 3 управления дорожным движением.
[0012] Блок 20 записи условий движения транспортного средства 2 является блоком, который включает в себя CPU, ROM, RAM, интерфейсную схему и т.п.
[0013] Блок 20 записи условий движения сохраняет темп ускорения транспортного средства, обнаруженный с помощью датчика 21 ускорения, прикрепленного к положению центра тяжести транспортного средства 2, угол поворота управляемых колес, обнаруженный с помощью датчика в системе 22 рулевого управления, угол хода акселератора, обнаруженный с помощью датчика в педали 23 акселератора, угол хода тормоза, обнаруженный с помощью датчика в педали 24 тормоза, и т.п. в качестве историй вождения и затем вычисляет и сохраняет характеристику начала движения транспортного средства 2 на основании историй вождения.
[0014] Между тем, блок 20 записи условий движения получает текущую скорость от спидометра 25 транспортного средства 2 и сохраняет текущую скорость. Кроме того, блок 20 записи условий движения вычисляет и сохраняет текущее положение транспортного средства 2 с помощью радиоволны, которую блок 26 приема GPS-радиоволн принимает от GPS-спутника.
[0015] Тем временем, на основании положения остановки транспортного средства 2 на перекрестке и положения остановки другого транспортного средства, останавливающегося впереди транспортного средства 2, блок 20 записи условий движения вычисляет и сохраняет расстояние между транспортными средствами относительно транспортного средства 2.
[0016] Между тем, блок 20 записи условий движения получает информацию указателя направления, указывающую состояние указателя 27 направления, от датчика, предусмотренного в указателе 27 направления, и сохраняет информацию указателя направления.
[0017] Блок 28 связи получает темп ускорения, угол поворота управляемых колес, угол хода акселератора, угол хода тормоза, характеристику начала движения, текущую скорость, текущее положение, расстояние между транспортными средствами и информацию указателя направления от блока 20 записи условий движения и отправляет устройству 1 направления транспортного средства эти части информации в качестве информации о транспортном средстве.
[0018] Между тем, блок 28 связи управляет блоком 29 управления транспортным средством посредством управляющего сигнала, принимаемого, например, от устройства 1 направления транспортного средства. Таким образом, блок 29 управления транспортным средством управляет положением транспортного средства 2, управляя системой 22 рулевого управления, педалью 23 акселератора, педалью 24 тормоза и т.п.
[0019] Устройство 1 направления транспортного средства включает в себя блок 11 хранения информации центра, который хранит информацию центра, принятую от серверного устройства в центре 3 управления дорожным движением, блок 12 хранения информации транспортного средства, который хранит информацию транспортного средства, принятую от транспортного средства 2, и блок 13 хранения картографических данных, который хранит картографические данные области, где транспортное средство 2 движется. Устройство 1 направления транспортного средства включает в себя блок 14 обнаружения останавливающегося транспортного средства, который обнаруживает останавливающиеся транспортные средства, которым не удается проехать светофор, установленный около дороги, по которой движется транспортное средство 2, пока свет остается зеленым, и блок 15 получения информации, который получает характеристику начала движения каждого обнаруженного транспортного средства от блока 12 хранения информации транспортного средства.
[0020] Устройство 1 направления транспортного средства включает в себя: блок 16 вычисления линии одновременного проезда, который вычисляет линию одновременного проезда на основании полученной характеристики начала движения, линия одновременного проезда служит в качестве цели для направления последующего транспортного средства; и блок 17 направления транспортного средства, который направляет последующее транспортное средство вперед за линию одновременного проезда. Устройство 1 направления транспортного средства выполняет способ направления транспортного средства.
[0021] Картографические данные включают в себя положения дорог, положения светофоров и ограничения разрешенной скорости на дорогах. Информация центра включает в себя, например, интервал времени, который каждый светофор сохраняет включенным зеленый свет, интервал времени, который каждый светофор сохраняет включенным красный свет, текущую погодную информацию, информацию о периоде затора движения каждой из дорог и т.д.
[0022] Далее, линия одновременного проезда будет объяснена конкретно, ссылаясь на пример.
Как показано на фиг. 2(a), светофор S устанавливается около дороги, включающей в себя полосы A и B движения, которые проходят в одном направлении. Транспортное средство X, имеющее более медленную характеристику начала движения (далее в данном документе упоминаемую как низкая характеристика начала движения) в ускорении в начале движения, чем характеристика начала движения, служащая в качестве эталона (далее в данном документе упоминаемая как базовая характеристика начала движения), включено в число транспортных средств, останавливающихся на полосе A движения. Транспортное средство X также является транспортным средством в хвосте на полосе A движения. Транспортные средства, останавливающиеся на полосе B движения, не включают в себя транспортные средства, имеющие низкую характеристику начала движения.
[0023] Здесь, как показано на фиг. 2(b), будет рассмотрена ситуация, где транспортное средство X в хвосте на полосе A движения, которая включает в себя транспортное средство, имеющее низкую характеристику начала движения, и транспортное средство Y, имеющее базовую характеристику начала движения, на полосе B движения, которая не включает в себя транспортные средства, имеющие низкую характеристику начала движения, начинают движение в одно и то же время и проезжают светофор S в одно и то же время. Т.е. транспортные средства X и Y движутся в течение одинакового периода времени (далее в данном документе упоминаемого как время T) и затем проезжают светофор S.
[0024] В это время транспортное средство Y, как предполагается, должно ускоряться в соответствии с базовой характеристикой начала движения, в то время как транспортное средство X, как предполагается, должно ускоряться в соответствии с низкой характеристикой начала движения. Отметим, что полоса движения, такая как полоса A, которая включает в себя транспортное средство, имеющее низкую характеристику начала движения, будет называться первой полосой движения, в то время как полоса движения, такая как полоса B, которая не включает в себя какое-либо транспортное средство, имеющее низкую характеристику начала движения, будет называться второй полосой движения.
[0025] Другими словами, вторая линия является задним краем в положении остановки транспортного средства на второй полосе движения, которое, как прогнозируется, должно проехать светофор одновременно с транспортным средством в хвосте на первой полосе движения.
[0026] Горизонтальная ось графика, показанного на фиг. 3, указывает расстояние между положением остановки транспортного средства и светофором S, в то время как вертикальная его ось указывает время, требуемое для проезда расстояния. Чем длиннее расстояние, тем больше времени требуется для проезда расстояния.
[0027] Как показано на фиг. 3, транспортное средство X, имеющее низкую характеристику начала движения, проезжает расстояние L [м] за время T. Транспортное средство X, указанное сплошной линией, представляет положение остановки транспортного средства X, в то время как транспортное средство X, указанное штриховой линией, представляет состояние после проезда светофора S.
[0028] С другой стороны, транспортное средство Y, имеющее базовую характеристику начала движения, проезжает расстояние L+L1 [м] за время T. Транспортное средство Y, указанное сплошной линией, представляет положение остановки транспортного средства Y, в то время как транспортное средство Y, указанное штриховой линией, представляет состояние после проезда светофора S.
[0029] Т.е. расстояние между положением в начале движения (положением остановки) транспортного средства X и светофором S равно L [м], а расстояние между положением в начале движения (положением остановки) транспортного средства Y и светофором S равно L+L1 [м].
[0030] В этом варианте осуществления положение заднего края транспортного средства X, показанного на фиг. 3, называется первой линией m1, положение заднего края транспортного средства Y называется второй линией m2, и первая линия m1 и вторая линия m2 совокупно называются линией одновременного проезда. Ради удобства линия одновременного проезда указывается жирной многоугольной линией, которая связывает первую линию m1 со второй линией m2.
[0031] Здесь, когда множество транспортных средств останавливается на полосе A движения, транспортное средство в хвосте начинает движение, после того как транспортное средство впереди него начало движение. Соответственно, базовая характеристика начала движения и низкая характеристика начала движения становятся хуже (медленнее) собственной характеристики начала движения соответствующего транспортного средства. Следовательно, предпочтительно получать характеристики начала движения, в то же время учитывая задержку в начале движения, как показано на фиг. 3.
[0032] Между тем, как и с задержкой в начале движения, характеристики начала движения ухудшаются, например, при плохой погоде. Соответственно, предпочтительно получить характеристики начала движения после подвергания ухудшению при такой погоде.
[0033] Аналогично, характеристики начала движения ухудшаются, например, в течение периода, загруженного движением транспортных средств. Соответственно, предпочтительно получать характеристики начала движения после подвергания ухудшению в таком периоде затора движения.
[0034] Далее последовательность операций устройства 1 направления транспортного средства будет описана со ссылкой на фиг. 5. Обработка в блок-схеме на фиг. 5 циклически выполняется в каждом заданном периоде, таком как 10 миллисекунд.
[0035] S1: Из картографических данных в блоке 13 хранения картографических данных блок 14 обнаружения останавливающегося транспортного средства получает положение дороги, на которой предусмотрены две или более полосы движения с каждой стороны и светофор с включенным зеленым светом, положение светофора и ограничение разрешенной скорости для дороги. Блок 14 обнаружения останавливающегося транспортного средства также получает текущие положения транспортных средств, едущих по дороге, от блока 12 хранения информации транспортного средства.
[0036] Кроме того, блок 14 обнаружения останавливающегося транспортного средства получает оставшееся время в состоянии зеленого света из информации центра в блоке 11 хранения информации центра. Блок 14 обнаружения останавливающегося транспортного средства обнаруживает останавливающиеся транспортные средства, которым не удается проехать светофор, в то время как свет остается зеленым, на основании разрешенного ограничения скорости для дороги, положения светофора, текущих положений транспортных средств и оставшегося времени.
[0037] Например, когда оставшееся время равно 30 [секундам], и разрешенное ограничение скорости равно 60 [км/ч], транспортные средства, находящиеся далеко на расстоянии (расстоянии определения) 500 [м] (= 60×1000/3600×30) или более до светофора, как предполагается, должны останавливаться на светофоре. Таким образом, обнаруживаются подходящие транспортные средства.
[0038] Здесь, каждое останавливающееся транспортное средство может также быть обнаружено с помощью текущей скорости, а также текущего темпа ускорения транспортного средства. Например, если оставшееся время становится меньше заданного периода, т.е. если расстояние определения становится короче заданного расстояния, тогда останавливающееся транспортное средство может быть обнаружено на основании: положения светофора; текущего положения, текущей скорости и текущего темпа ускорения транспортного средства; и оставшегося времени без помощи ограничения разрешенной скорости.
[0039] S3: Далее блок 15 получения информации получает характеристики начала движения, а также информацию указателя направления, по транспортным средствам, обнаруженным на этапе S1, от блока 12 хранения информации транспортного средства. Например, блок 15 получения информации получает характеристики начала движения, включенные в информацию транспортного средства, сохраненную в блоке 12 хранения информации транспортного средства.
[0040] Блок 15 получения информации может получать текущую погодную информацию и информацию о периоде затора движения для дороги из информации центра в блоке 11 хранения информации центра, таким образом, получая характеристику начала движения, подходящую по меньшей мере для одного из погоды и периода. Например, как дополняется в описании со ссылкой на фиг. 4, характеристика начала движения снижается в случае плохой погоды или во время периода затора движения. Альтернативно, такая характеристика начала движения сохраняется заранее и используется при необходимости.
[0041] S5: Далее, блок 16 вычисления линии одновременного проезда определяет, удовлетворяется ли одно из следующих условий, а именно (условие 1) - что низкая характеристика начала движения включена в полученные характеристики начала движения, и (условие 2) - что информация указателя направления, указывающая состояние выполнения правого поворота или левого поворота, включена в полученную информацию указателя направления. Если ни одно из двух условий не удовлетворяется (S5: Нет), обработка переходит к этапу S7. Когда по меньшей мере одно из условий удовлетворяется (S5: Да), обработка переходит к этапу S9.
[0042] Отметим, что определение (условия 2) относительно того, включена ли информация указателя направления, указывающая состояние выполнения правого поворота или левого поворота, эквивалентно определению относительно того, выполняет ли транспортное средство правый поворот или левый поворот, или движется прямо. Это определение может быть выполнено без помощи информации указателя направления. Например, история вождения водителя может быть включена в информацию транспортного средства, которая должна быть получена. Затем, на основании истории вождения, правый поворот или левый поворот может быть предположен в таком местоположении, где водитель часто выполнял правый поворот или левый поворот в прошлом.
[0043] S7: Блок 17 направления транспортного средства направляет и размещает транспортные средства, обнаруженные на этапе S1 с равными интервалами, и затем обработка переходит к этапу S25. На этапе S7 блок 17 направления транспортного средства передает управляющие сигналы транспортным средствам, которым необходимо изменять текущие положения, например, и транспортные средства, принимающие управляющие сигналы, автоматически изменяют текущие положения и, таким образом, размещаются с равными интервалами.
[0044] Здесь, экран карты, установленный в каждом транспортном средстве, может указывать положение после изменения на основании управляющего сигнала, и водитель, получивший указание таким образом, может перемещать транспортное средство, например, в положение после изменения. В качестве альтернативы, перемещение может направляться голосом и т.п. Кроме того, транспортное средство может принудительно перемещаться посредством рекомендации для перемещения вместо непосредственного управления или инструкций, как упомянуто выше. Здесь, даже если транспортное средство не изменяет положение вопреки управлению или рекомендации, остается тот факт, что транспортное средство было направлено. То же применяется к аналогичному направлению транспортного средства, которое будет описано позже.
[0045] S9: Блок 16 вычисления линии одновременного проезда определяет, содержится ли низкая характеристика начала движения в характеристиках начала движения, полученных на этапе S3. Обработка переходит к этапу S11, когда низкая характеристика начала движения содержится в полученных характеристиках начала движения (S9: Да), или переходит к этапу S17, когда низкая характеристика начала движения не содержится в них (S9: Нет).
[0046] S11: Блок 16 вычисления линии одновременного проезда получает текущее положение каждого транспортного средства, имеющего низкую характеристику начала движения, от блока 12 хранения информации транспортного средства. На основании текущего положения блок 16 вычисления линии одновременного проезда определяет, включены ли транспортные средства, имеющие низкую характеристику начала движения, во все полосы движения. Обработка переходит к этапу S17, когда транспортные средства, имеющие низкую характеристику начала движения, включены во все полосы движения (S11: Да), или переходит к этапу S13, когда транспортные средства, имеющие низкую характеристику начала движения, не включены по меньшей мере в одну из полос движения (S11: Нет).
[0047] S13: Блок 16 вычисления линии одновременного проезда вычисляет положение остановки каждого транспортного средства, обнаруженного на этапе S1. Положение остановки вычисляется, например, на основании текущей скорости, текущего положения, расстояния между транспортными средствами во время остановки и текущего темпа ускорения в информации транспортного средства. Между тем, связь между транспортными средствами может быть разрешена, и число транспортных средств, движущихся впереди некоторого транспортного средства, может быть получено посредством связи между транспортными средствами и использовано для вычисления. Дополнительно, длина транспортного средства для каждого транспортного средства может быть получена и использована для вычисления.
[0048] S15: Далее, блок 16 вычисления линии одновременного проезда вычисляет линию одновременного проезда (первую линию m1 и вторую линию m2) на основании положений остановки, вычисленных на этапе S13 и на основании низкой характеристики начала движения, и для каждого из сочетаний первой полосы движения, включающей в себя транспортное средство, имеющее низкую характеристику начала движения, и соседней второй полосы, которая не включает в себя какое-либо транспортное средство, имеющее низкую характеристику начала движения. Затем, обработка переходит к этапу S17.
[0049] S17: Блок 16 вычисления линии одновременного проезда определяет, включена ли информация указателя направления, указывающая состояние выполнения правого поворота или левого поворота, в информацию указателя направления, полученную на этапе S3. Обработка переходит к этапу S19, когда информация указателя направления, указывающая состояние выполнения правого поворота или левого поворота, включена в полученную информацию указателя направления (S17: Да), или переходит к этапу S21, если информация не включена в нее (S17: Нет).
[0050] Здесь, как и с этапом S5, определение может быть выполнено на основании истории вождения относительно того, собирается ли транспортное средство выполнить правый поворот или левый поворот. Затем, обработка может переходить к этапу S19, когда транспортное средство собирается выполнить правый поворот или левый поворот, или может переходить к этапу S21, если транспортное средство собирается двигаться прямо.
[0051] S19: Блок 14 вычисления линии одновременного проезда корректирует линию одновременного проезда, и затем обработка переходит к этапу S21.
[0052] На этапе S19, когда одно или более транспортных средств (поворачивающие направо транспортные средства или поворачивающие налево транспортные средства), соответствующих информации указателя направления, указывающей состояние выполнения правого поворота или левого поворота, включены в первую полосу движения, например, блок 16 вычисления линии одновременного проезда перемещает вторую линию m2 назад в ответ на число поворачивающих направо транспортных средств или поворачивающих налево транспортных средств. Между тем, когда одно или более поворачивающих направо транспортных средств или поворачивающих налево транспортных средств включены во вторую полосу движения, например, блок 16 вычисления линии одновременного проезда перемещает вторую линию m2 вперед в ответ на число поворачивающих направо транспортных средств или поворачивающих налево транспортных средств.
[0053] S21: Блок 17 направления транспортного средства направляет транспортное средство к линии одновременного проезда в качестве цели, и затем обработка переходит к этапу S23. Например, блок 17 направления транспортного средства направляет последующее транспортное средство, которое движется из-за линии одновременного проезда, вперед за линию одновременного проезда.
[0054] S23: Блок 15 получения информации получает интервал времени, в течение которого соответствующий светофор сохраняет включенным зеленый свет, из информации центра в блоке 11 хранения информации центра. Блок 17 направления транспортного средства определяет, удовлетворяется ли какое-либо одно из двух условий (условий 1 и 2).
[0055] Условием 1 является то, что расстояние (упоминаемое как Ds), которое транспортное средство, начинающее движение с низкой характеристикой начала движения, проезжает за интервал времени, пока светофор сохраняет включенным зеленый свет, короче расстояния (упоминаемое как D1) между светофором и первой линией m1. Условием 2 является то, что расстояние (упоминаемое как Df), которое транспортное средство, начинающее движение с базовой характеристикой начала движения, проезжает за интервал времени, пока светофор сохраняет включенным зеленый свет, короче расстояния (называемого D2) между светофором и второй линией m2.
[0056] Управление в блок-схеме на фиг. 5 завершается, когда по меньшей мере одно из условий удовлетворяется (S23: Да). Обработка переходит к этапу S25, если ни одно из условий не удовлетворяется (S23: Нет).
[0057] S25: Блок 17 направления транспортного средства определяет, имеется ли транспортное средство, которое следует за каждым транспортным средством, обнаруженным на этапе S1. Управление в блок-схеме на фиг. 5 завершается, когда нет последующих транспортных средств (S25: Нет). Обработка возвращается к этапу S3, когда есть последующее транспортное средство (S25: Да).
[0058] Когда обработка возвращается от этапа S25 к этапу S3, каждое последующее транспортное средство, обнаруженное на этапе S25, рассматривается как транспортное средство, обнаруженное на этапе S1, а именно, транспортное средство, останавливающееся около светофора. Кроме того, на последующем этапе S3 блок 15 получения информации получает характеристику начала движения и информацию указателя направления по каждому из последующих транспортных средств, обнаруженных на этапе S25, от блока 12 хранения информации транспортного средства.
[0059] Далее, направление транспортных средств с помощью линии одновременного проезда будет описано с помощью конкретного примера.
Как показано на фиг. 6, последующее транспортное средство X2 движется по направлению к линии транспортных средств на фиг. 2(a).
Положение первой линии m1 находится на заднем крае транспортного средства X, в то время как положение второй линии m2 находится на расстоянии L1 [м] позади первой линии m1, как было описано со ссылкой на фиг. 3.
[0060] На фиг. 6 транспортное средство X1 пересекает вторую линию m2, и не имеется пространство, которое позволяет транспортному средству выдвинуться впереди второй линии m2. Соответственно, устройство 1 направления транспортного средства направляет транспортное средство X2 на полосу A движения с более коротким рядом транспортных средств, как показано на фиг. 7.
[0061] Устройство 1 направления транспортного средства вычисляет новую линию одновременного проезда с точки зрения ряда транспортных средств, включающих в себя транспортное средство X2.
Поскольку транспортное средство X2 останавливается позади транспортного средства X, транспортное средство X2 вынуждено начинать движение с низкой характеристикой начала движения, несмотря на базовую характеристику начала движения. Устройство 1 направления транспортного средства считает, что транспортное средство X2 имеет низкую характеристику начала движения, и вычисляет расстояние L2 [м], соответствующее транспортному средству X2, с помощью того же способа, что и способ для L1. Положение такой новой первой линии m1 находится на заднем крае транспортного средства X2, в то время как положение новой второй линии m2 находится на расстоянии L1+L2 [м] позади первой линии m1.
[0062] Следовательно, последующие транспортные средства X3 и X4 движутся вместе.
Имеется пространство, которое позволяет транспортным средствам выдвинуться впереди второй линии m2. Соответственно, устройство 1 направления транспортного средства направляет транспортные средства X3 и X4 в пространство впереди второй линии m2, как показано на фиг. 8.
Как следствие, транспортные средства X3 и X4 могут проезжать светофор S одновременно с транспортным средством X2 в хвосте или раньше него.
[0063] Здесь блок 15 получения информации может получать информацию о типе транспортного средства по транспортному средству от такого транспортного средства, в то время как блок 16 вычисления линии одновременного проезда может вычислять линию одновременного проезда на основании информации о типе транспортного средства, и блок 17 направления транспортного средства может направлять транспортное средство перед линией одновременного проезда на основании информации о типе транспортного средства.
[0064] Например, если длина транспортного средства обнаруживается из информации о типе транспортного средства, представляется возможным вычислять линию одновременного проезда более точно. Даже когда положение водительского сиденья в транспортном средстве в хвосте на первой полосе движения определяется в качестве текущего положения, положение второй линии изменяется в зависимости от длины транспортного средства. Представляется возможным безусловно увеличивать число транспортных средств, которые проезжают светофор S, пока свет остается зеленым, получая длину транспортного средства из информации о типе транспортного средства и вычисляя вторую линию в зависимости от длины.
[0065] После этого, последующие транспортные средства X5, X6 и X7 движутся вместе. Здесь, поскольку пространство впереди второй линии m2 было использовано транспортными средствами X3 и X4, устройство 1 направления транспортного средства направляет транспортное средство X5 на полосу A движения с более коротким рядом транспортных средств, как показано на фиг. 9.
[0066] Устройство 1 направления транспортного средства вычисляет новую линию одновременного проезда с точки зрения ряда транспортных средств, включающих в себя транспортное средство X5.
Устройство 1 направления транспортного средства считает, что транспортное средство X5 имеет низкую характеристику начала движения, и вычисляет расстояние L3 [м], соответствующее транспортному средству X5, с помощью того же способа, что и способ для расстояния L1 и L2. Положение новой первой линии m1 находится на заднем крае транспортного средства X5, в то время как положение новой второй линии m2 находится на расстоянии L1+L2+L3 [м] позади первой линии m1.
[0067] Здесь, что касается транспортных средств, отличных от транспортного средства X2 на фиг. 6, если транспортные средства X2, X3, X4 и X5 едут вместе, и транспортное средство X5 становится транспортным средством в хвосте на полосе A движения, тогда линия одновременного проезда (m1 и m2) на фиг. 9 может быть вычислена в первом месте без вычисления одновременных линий проезда (m1 и m2), показанных на фиг. 7 и 8. Таким образом, необязательно вычислять более ранние линии одновременного проезда, и, таким образом, представляется возможным уменьшать вычислительную нагрузку.
[0068] Т.е. когда транспортное средство в хвосте множества транспортных средств, следующих за останавливающимся транспортным средством, становится транспортным средством в хвосте первой полосы движения, блок 16 вычисления линии одновременного проезда определяет задний край этого транспортного средства в качестве первой линии и вычисляет вторую линию на основании первой линии. Таким образом, представляется возможным уменьшать нагрузку, чтобы вычислять линии одновременного проезда.
[0069] Имеется пространство, которое позволяет транспортным средствам выдвинуться впереди новой второй линии m2. Соответственно, устройство 1 направления транспортного средства направляет транспортные средства X6 и X7 в пространство впереди второй линии m2.
[0070] Как описано выше, согласно этому варианту осуществления, устройство 1 направления транспортного средства обнаруживает останавливающиеся транспортные средства, которым не удается проехать светофор, пока свет остается зеленым, и получает характеристики начала движения соответствующих обнаруженных транспортных средств. Затем, на основании характеристик начала движения, устройство 1 направления транспортного средства вычисляет линию одновременного проезда, когда транспортное средство, имеющее характеристику начала движения ниже базовой характеристики начала движения, включено в транспортные средства, останавливающиеся на первой полосе (A) движения, и когда транспортные средства, имеющие низкую характеристику начала движения, не включены в транспортные средства, останавливающиеся на второй полосе (B) движения.
[0071] Линия одновременного проезда включает в себя первую линию (m1), указывающую задний край транспортного средства (X) в хвосте на первой полосе (A) движения, и вторую линию (m2), указывающую задний край в положении остановки транспортного средства (Y) на второй полосе (B) движения, которое, как прогнозируется, должно проехать светофор одновременно с транспортным средством в хвосте на первой полосе движения. Устройство 1 направления транспортного средства направляет последующие транспортные средства вперед за линию одновременного проезда.
[0072] Таким образом, направляемые транспортные средства X3 и X4, например, могут проезжать светофор S одновременно с или раньше транспортного средства X2 в хвосте. Между тем, направляемые транспортные средства X6 и X7 могут проезжать светофор S одновременно с транспортным средством X5 в хвосте или раньше него. В результате представляется возможным увеличить число транспортных средств, которые проезжают светофор S, пока свет остается зеленым, и улучшить интенсивность дорожного движения.
[0073] Между тем, блок 15 получения информации получает характеристику начала движения, подходящую по меньшей мере для одного из погоды и периода во время вычисления линии одновременного проезда, в то время как блок 16 вычисления линии одновременного проезда вычисляет линию одновременного проезда на основании характеристики начала движения, и блок 17 направления транспортного средства направляет транспортное средство вперед за линию одновременного проезда. Соответственно, в случае плохой погоды или в течение периода затора движения, когда характеристика начала движения отличается от характеристики в хорошую погоду или в течение периода без затора движения, например, все еще представляется возможным увеличивать число транспортных средств, проезжающих светофор S, в то время как свет остается зеленым.
[0074] Далее будет приведено описание случая, когда транспортное средство, выполняющее правый поворот, или транспортное средство, выполняющее левый поворот, включено в ряд транспортных средств.
На фиг. 10 не имеются транспортные средства, имеющие низкую характеристику начала движения, и транспортное средство X10 на полосе A движения собирается выполнить левый поворот в положении светофора S. Время, требуемое, чтобы транспортное средство выполнило левый поворот, будет определено как ΔTL [секунд]. Транспортное средство X10 проезжает светофор S на ΔTL [секунд] позже случая движения прямо. Между тем, на транспортное средство X11 справа позади транспортного средства X10 оказывает влияние транспортное средство X10, даже когда транспортное средство X11 движется прямо, и, следовательно, проезжает светофор S на ΔTL [секунд] позже.
[0075] Положение первой линии m1 находится на заднем крае транспортного средства X11. Предположим, что расстояние, которое транспортное средство, имеющее базовую характеристику начала движения, проезжает за период ΔTL [секунд] в положении светофора S, равно L1 [м], тогда положение второй линии m2 располагается на расстоянии L1 [м] позади первой линии m1.
[0076] Когда имеется транспортное средство (транспортное средство X10 в случае на фиг. 10), выполняющее правый поворот или левый поворот на первой полосе движения (полосе A движения на фиг. 10), включающей в себя транспортное средство, имеющее низкую характеристику начала движения, положение остановки транспортного средства Y на фиг. 3 должна быть расположена дальше от светофора S, чем положение в случае, когда нет транспортных средств, выполняющих правый поворот или левый поворот на первой полосе движения. Соответственно, вторая линия m2 перемещается назад на расстояние L1 [м] на фиг. 10.
[0077] На фиг. 11 транспортное средство X12 на полосе A движения является транспортным средством, имеющим низкую характеристику начала движения, в то время как транспортное средство X13 справа позади собирается выполнить левый поворот в положении светофора S. Другие транспортные средства являются транспортными средствами, имеющими базовую характеристику начала движения, и собираются двигаться прямо мимо светофора S.
[0078] Расстояние L1 [м] является разницей между расстоянием от транспортного средства X12, имеющего низкую характеристику начала движения, до светофора S и расстоянием, которое транспортное средство, имеющее базовую характеристику начала движения, проезжает за период, требуемый для транспортного средства X12, чтобы проехать светофор S.
[0079] Расстояние L2 [м] является разницей между расстоянием от транспортного средства X13, которое рассматривается как имеющее низкую характеристику начала движения вследствие влияния транспортного средства X12 впереди него, до светофора S и расстоянием, которое транспортное средство, имеющее базовую характеристику начала движения проезжает за период, требуемый для транспортного средства X13, чтобы проехать светофор S.
[0080] Расстояние L3 [м] является расстоянием, которое транспортное средство, имеющее базовую характеристику начала движения, проезжает в положении светофора S за ΔTL [секунд].
[0081] Положение первой линии m1 находится на заднем крае транспортного средства X13, а положение второй линии m2 находится на расстоянии L1+L2+L3 [м] позади первой линии m1.
[0082] Когда имеется транспортное средство (транспортное средство X13 в случае на фиг. 11), выполняющее правый поворот или левый поворот на первой полосе движения (полосе A движения на фиг. 11), включающей в себя транспортное средство, имеющее низкую характеристику начала движения, положение остановки транспортного средства Y на фиг. 3 должно быть расположено дальше от светофора S, чем положение в случае, когда нет транспортных средств, выполняющих правый поворот или левый поворот на первой полосе движения. Соответственно, вторая линия m2 перемещается назад на расстояние L3 [м] на фиг. 11.
[0083] Если не имеется пространство для транспортного средства впереди второй линии m2 перед перемещением, последующее транспортное средство направляется, например, вправо позади транспортного средства X13. По этой причине направляемое транспортное средство не может проехать светофор S одновременно с транспортным средством X13.
[0084] С другой стороны, когда предусматривается пространство для транспортного средства впереди второй линии m2 после перемещения, последующее транспортное средство направляется в это пространство. Соответственно, транспортное средство может проехать светофор S одновременно с транспортным средством X13 или раньше него.
[0085] Таким образом, представляется возможным увеличивать число транспортных средств, которые проезжают светофор S, больше числа транспортных средств в случае без перемещения второй линии m2.
[0086] Здесь, когда транспортное средство, управляемое водителем, имеющее низкоскоростную характеристику движения, включено в полосу A движения, предпочтительно перемещать вторую линию назад, как и в случае, когда транспортное средство, выполняющее правый поворот или левый поворот, включено в полосу A движения. Например, характеристика вождения водителя, который имеет больше шансов движения с низкой скоростью, определяется как низкоскоростная характеристика вождения, в то время как характеристика вождения водителя, который имеет меньше шансов движения с низкой скоростью, определяется как высокоскоростная характеристика вождения.
[0087] Например, характеристика вождения каждого водителя включена в информацию транспортного средства. Блок 15 получения информации получает характеристику вождения водителя каждого останавливающегося транспортного средства из информации транспортного средства, в то время как блок 16 вычисления линии одновременного проезда определяет, является ли характеристика вождения, соответствующая каждому транспортному средству, останавливающемуся на первой полосе движения, низкоскоростной характеристикой вождения или высокоскоростной характеристикой вождения, и перемещает вторую линию назад, когда характеристика вождения определяется как низкоскоростная характеристика вождения.
[0088] Таким образом, как и в случае, когда транспортное средство, выполняющее правый поворот или левый поворот, включено в полосу A движения, представляется возможным увеличивать число транспортных средств, которые проезжают светофор S, больше числа транспортных средств в случае без перемещения второй линии m2.
[0089] На фиг. 12, транспортное средство X14 на полосе A движения является транспортным средством, имеющим низкую характеристику начала движения, в то время как транспортное средство X15 на полосе B движения собирается выполнить правый поворот в положении светофора S. Другие транспортные средства являются транспортными средствами, имеющими базовую характеристику начала движения, и которые собираются двигаться прямо мимо светофора S.
[0090] Расстояние L1 [м] является разницей между расстоянием от транспортного средства X14, имеющего низкую характеристику начала движения, до светофора S и расстоянием, которое транспортное средство, имеющее базовую характеристику начала движения, проезжает за период, требуемый для транспортного средства X14, чтобы проехать светофор S.
[0091] Расстояние L2 [м] является разницей между расстоянием от транспортного средства X16, которое рассматривается как имеющее низкую характеристику начала движения вследствие влияния транспортного средства X14 впереди него, до светофора S и расстоянием, которое транспортное средство, имеющее базовую характеристику начала движения, проезжает за период, требуемый для транспортного средства X16, чтобы проехать светофор S.
[0092] Расстояние L3 [м] является расстоянием, которое транспортное средство, имеющее базовую характеристику начала движения, проезжает за время ΔTR [секунд], требуемое для выполнения правого поворота.
[0093] Положение первой линии m1 находится на заднем крае транспортного средства X16, а положение второй линии m2 находится на расстоянии L1+L2-L3 [м] позади первой линии m1.
[0094] Когда имеется транспортное средство (транспортное средство X15 в случае на фиг. 12), выполняющее правый поворот или левый поворот на второй полосе движения (полосе B движения на фиг. 12), которая не включает в себя транспортные средства, имеющие низкую характеристику начала движения, положение остановки транспортного средства Y на фиг. 3 должно быть расположено ближе к светофору S, чем положение в случае, когда нет транспортных средств, выполняющих правый поворот или левый поворот на второй полосе движения. Соответственно, вторая линия m2 перемещается вперед на расстояние L3 [м] на фиг. 12.
[0095] Если имеется пространство для транспортного средства впереди второй линии m2 перед перемещением, последующее транспортное средство направляется, например, в упомянутое пространство. По этой причине направляемое транспортное средство может не иметь возможности проехать светофор S одновременно с транспортным средством X16 или раньше него.
[0096] С другой стороны, если это пространство может быть ликвидировано посредством перемещения второй линии m2 вперед, транспортное средство, движущееся по полосе A движения, не может быть направлено, например, на полосу B движения. Таким образом, представляется возможным предотвращать вышеупомянутое необязательное направление.
[0097] На фиг. 13 транспортные средства X17, X18 и X19 на полосе A движения являются транспортными средствами, имеющими низкую характеристику начала движения, и транспортные средства X20 и X21 на полосе B движения также являются транспортными средствами, имеющими низкую характеристику начала движения. Транспортное средство X19 собирается выполнить левый поворот в положении светофора S. Другие транспортные средства являются транспортными средствами, имеющими базовую характеристику начала движения, и которые собираются двигаться прямо мимо светофора S.
[0098] Расстояние L1 [м] является расстоянием, которое транспортное средство X19, имеющее низкую характеристику начала движения и выполняющее левый поворот, проезжает за время ΔTL [секунд], являющееся временем, требуемым для транспортного средства, чтобы выполнить левый поворот в положении светофора S.
[0099] Положение первой линии m1 находится на заднем крае транспортного средства X19, в то время как положение второй линии m2 находится на расстоянии L1 [м] позади первой линии m1.
[0100] Если транспортное средство X19 не выполняет левый поворот, тогда положение второй линии m2 находится на заднем крае транспортного средства X21, поскольку транспортные средства, имеющие низкую характеристику начала движения, включены в полосы A и B движения, и транспортные средства на соответствующих полосах A и B движения начинают движение в одинаковых условиях.
[0101] Тем не менее, поскольку транспортное средство X19 выполняет левый поворот, положение второй линии m2 находится на расстоянии L1 [м] позади первой линии m1.
[0102] Как показано на фиг. 14, интервал времени, пока светофор S сохраняет включенным зеленый свет, определяется как Tb, расстояние, которое транспортное средство, имеющее базовую характеристику начала движения, проезжает за время Tb, определяется как Ds, и расстояние, которое транспортное средство, имеющее низкую характеристику начала движения, проезжает за время Tb, определяется как Df.
[0103] Между тем, расстояние между светофором S и первой линией m1 определяется как D1, а расстояние между светофором S и второй линией m2 определяется как D2.
[0104] В случае на фиг. 14 условие Ds<D2 удовлетворяется, в то время как условие Df<D1 не удовлетворяется. Другими словами, одно из условий удовлетворяется, и направление последующего транспортного средства, следовательно, приостанавливается.
[0105] Между тем, направление последующего транспортного средства также приостанавливается, когда условие Df<D1 удовлетворяется, в то время как условие Ds<D2 не удовлетворяется.
[0106] Кроме того, направление последующего транспортного средства также приостанавливается, когда условие Df<D1 удовлетворяется, и условие Ds<D2 также удовлетворяется.
[0107] Как описано выше, в этом варианте осуществления, направление последующего транспортного средства приостанавливается, когда по меньшей мере одно из условия Df<D1 и условия Ds<D2 удовлетворяется. Таким образом, необязательно вычислять линии одновременного проезда или направлять транспортные средства после этого. Следовательно, представляется возможным уменьшать нагрузки, ассоциированные с вычислением линий одновременного проезда, формированием сигналов, требуемых для направления транспортных средств, и т.д.
[0108] Хотя устройство 1 направления транспортного средства предусматривается отдельно от транспортного средства в этом варианте осуществления, устройство 1 направления транспортного средства может быть вместо этого включено в транспортное средство. В этом случае информация транспортного средства по другим транспортным средствам может быть получена посредством связи с такими транспортными средствами.
Кроме того, в этом варианте осуществления, линия одновременного проезда вычисляется, когда транспортное средство, имеющее низкую характеристику начала движения, включено в первую полосу (A) движения, в то время как транспортные средства, не имеющие низкую характеристику начала движения, включены во вторую полосу (B) движения.
Однако, линия одновременного проезда может быть вычислена, когда транспортное средство, имеющее низкую характеристику начала движения, включено в транспортные средства, останавливающиеся на первой полосе (A) движения, и транспортное средство (упоминаемое как релевантное транспортное средство), имеющее характеристику начала движения, более высокую, чем характеристики начала движения транспортных средств на первой полосе (A) движения, включено в транспортные средства, останавливающиеся на второй полосе (B) движения.
Это обусловлено тем, что характеристика начала движения релевантного транспортного средства выше по меньшей мере характеристик начала движения транспортных средств на первой полосе (A) движения, и положения первой линии и второй линии, следовательно, отличаются друг от друга.
[0109] Хотя выше был описан вариант осуществления настоящего изобретения, не следует подразумевать, что описание и чертежи, составляющие часть данного описания изобретения, предназначены для ограничения этого изобретения. Различные альтернативные варианты осуществления, примеры и методики применения будут очевидны специалистам в области техники из этого описания изобретения.
Список условных обозначений
[0110] 1 устройство направления транспортного средства
2 X, X2, X3, X4, X5, X6, X7, X10, X11, X12, X13, X14, X15, X16, X17, X18, X19, X20, X21, Y транспортное средство
3 центр управления дорожным движением
11 блок хранения информации центра
12 блок хранения информации транспортного средства
13 блок хранения картографических данных
14 блок обнаружения останавливающегося транспортного средства
15 блок получения информации
16 блок вычисления линии одновременного проезда
17 блок направления транспортного средства
20 блок записи условий движения
21 датчик ускорения
22 система рулевого управления
23 педаль акселератора
24 педаль тормоза
25 спидометр
26 блок приема GPS-радиоволн
27 указатель направления
28 блок связи
29 блок управления транспортным средством
A полоса движения (первая полоса движения)
B полоса движения (вторая полоса движения)
m1 первая линия
m2 вторая линия
S светофор
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

