Результат интеллектуальной деятельности: ТЕРМОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ ПЕРЕМЕЩЕНИЯ ОПТИЧЕСКИХ КОМПОНЕНТОВ ОБЪЕКТИВА
Вид РИД
Изобретение
Изобретение относится к области приборостроения и может быть использовано в тепловизорах в качестве механического привода автоматической фокусировки изображения, построенного его объективом, в рабочем диапазоне температур от минус 40°C до плюс 50°C.
Уровень техники
Объективы для ИК-области спектра изготавливают в основном из монокристаллического германия или кремния, а также других материалов, прозрачных в указанных областях спектра. Эти материалы, особенно германий, характеризуются значительным изменением показателя преломления от температуры, что вызывает дефокусировку изображения объектива - смещение плоскости изображения относительно плоскости фотоприемника вдоль оптической оси. Это приводит к существенному снижению качества изображения, особенно в температурном диапазоне от минус 40°C до плюс 50°C.
В существующих конструкциях объективов для уменьшения температурной дефокусировки изображения используются дорогостоящие материалы оправ, такие, например, как инвар и титан.
Наиболее близким по технической сущности решением задачи сохранения качества изображения в широком температурном диапазоне является подвижка всего объектива или его отдельных оптических компонентов с помощью электропривода, которая компенсирует температурный сдвиг плоскости изображения.
Недостатком конструкции объективов с подвижным оптическим компонентом (см. патенты РФ №2365952 и США №4479695) является осуществление подвижки компонента объектива электроприводом с батареями для его электропитания, электродвигателями, редукторами, датчиками температуры, что приводит к увеличению: массы и габаритов изделия, энергопотребления и снижению эксплуатационной оперативности.
Раскрытие изобретения
Задачей изобретения является создание привода для компенсации дефокусировки изображения объектива тепловизора, работающего в широком интервале температур, основанного на эффекте линейного изменения геометрии твердых тел при изменении температуры.
Технический результат: обеспечение термокомпенсации дефокусировки изображения объектива тепловизора, работающего в температурном интервале от минус 40°C до плюс 50°C, в пределах ошибки измерения дефокусировки изображения объектива. При этом не требуется дополнительной электроэнергии, двигателей, редукторов, датчиков температуры и других компонентов электропривода.
Поставленная задача решена созданием термомеханического привода (далее - термопривода), основными деталями которого являются пластины одинаковой геометрии, состоящие из двух материалов с разными коэффициентами линейного расширения, при условии совместимости технологии их соединения. Например, это может быть ковар и нержавеющая сталь, которые хорошо свариваются между собой любым способом сварки. Ширина и толщина пластин определяются из прочностного расчета и конструкторских решений, а длина пластин - из терморасчета.
Описание конструкции термопривода
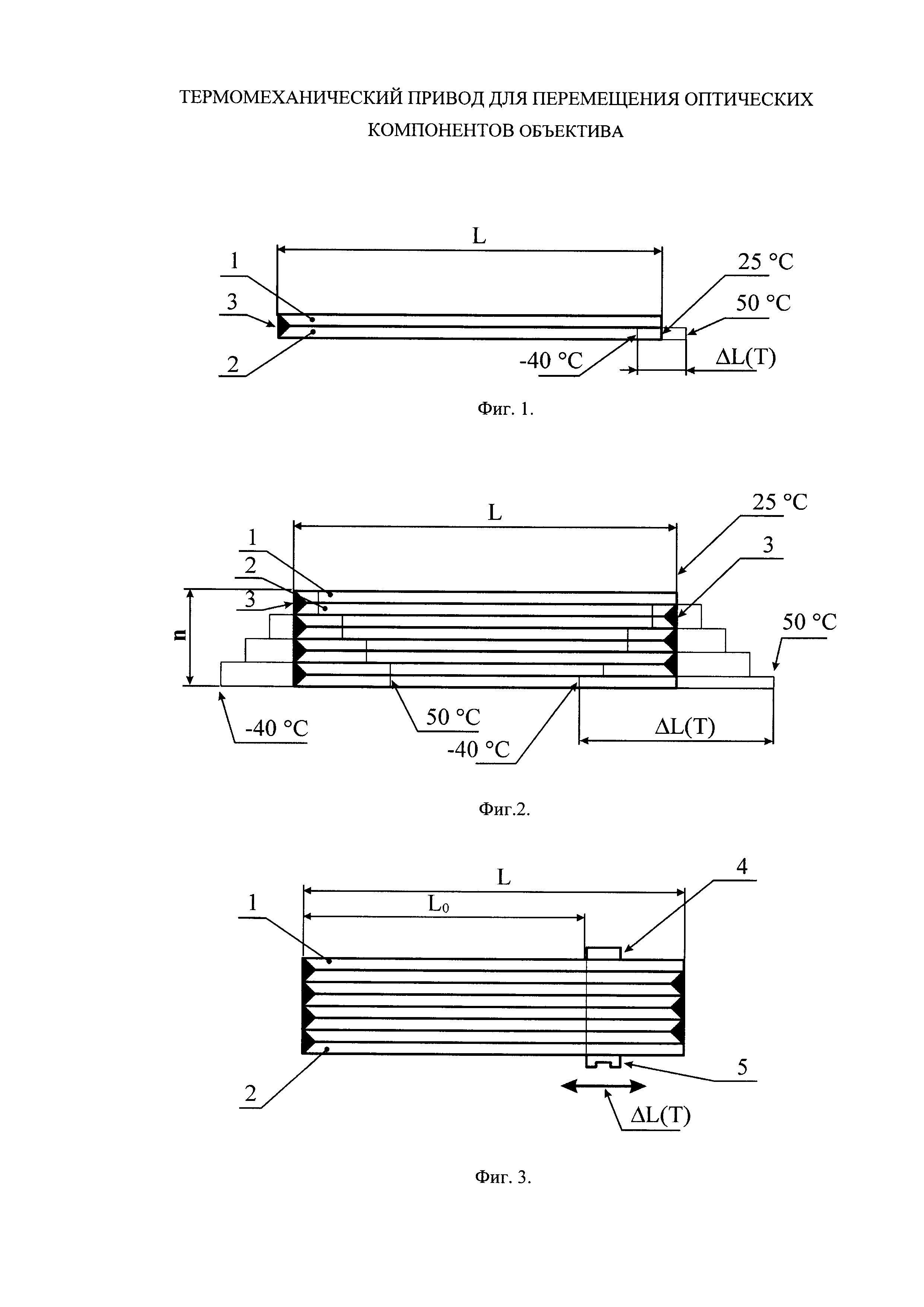
Пластины из разных материалов, попарно свариваются между собой, как показано на фигуре 1, где:
1 - пластина из материала с малым коэффициентом температурного расширения, например ковара;
2 - пластина из материала с большим коэффициентом температурного расширения, например нержавеющей стали,
3 - место сварки,
L - длина пластины.
Для пластин, закрепленных таким образом, как показано на фигуре 1, справедлива формула:

где ΔL(T) - суммарное перемещение конца второй пластины относительно неподвижного конца первой пластины при изменении температуры,
L - длина пластин,
ΔT - интервал изменения температуры,
α 1 и α2 - коэффициенты линейного расширения материалов пластин.
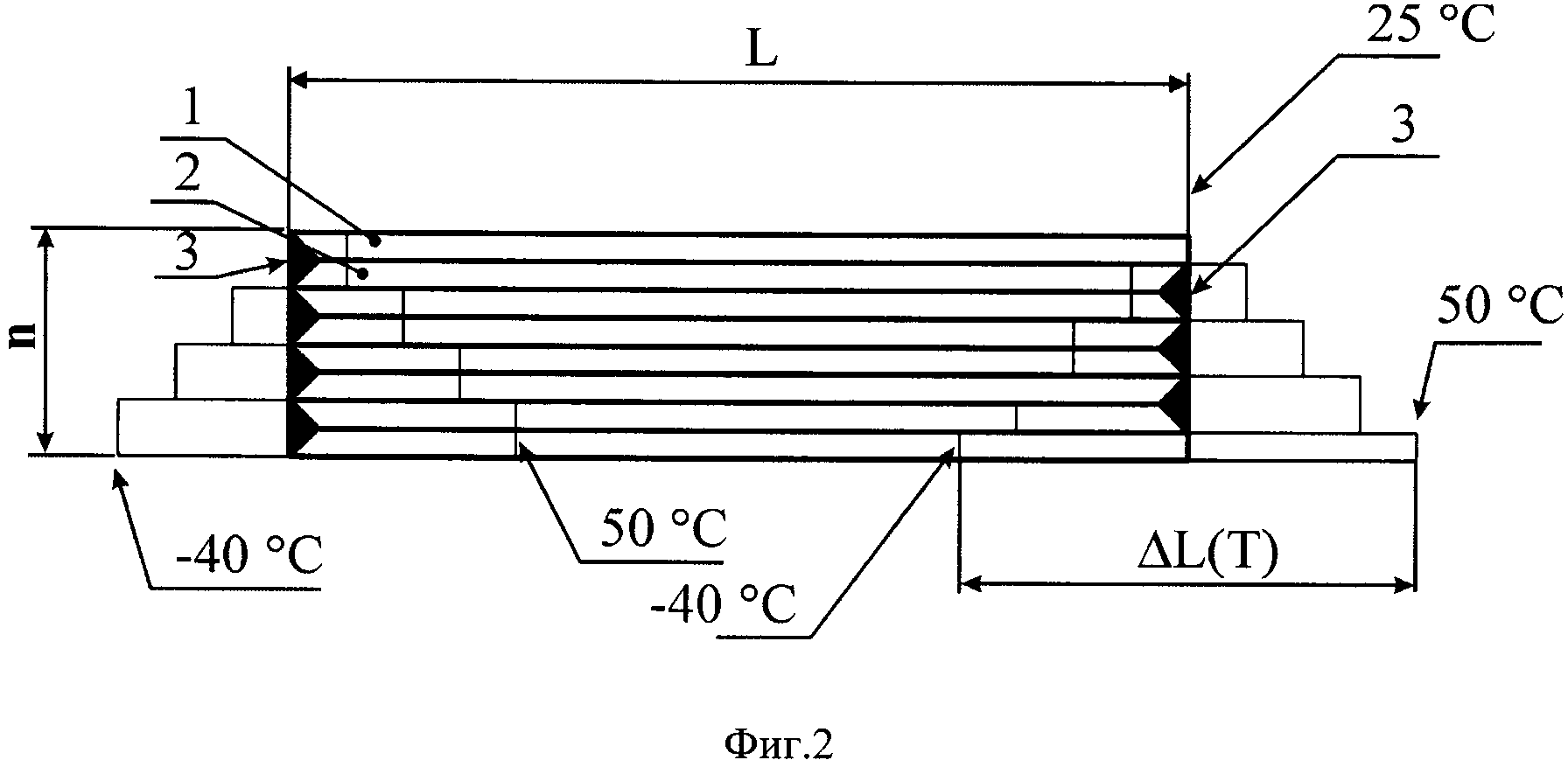
Далее пары пластин складываются в стопку из n пар пластин и также свариваются между собой таким образом, чтобы получилась стопка чередующихся пластин с меньшим и большим коэффициентами расширения, при этом крайними будут пластина с меньшим и пластина с большим коэффициентами расширения, как показано на фигуре 2.
Для конструкции, показанной на фигуре 2, справедлива формула:

где n - количество пар пластин.
Далее конструкция термопривода поясняется фигурами 3 и 4.
К первой пластине (например, из ковара) стопки n пар пластин, как показано на фигуре 3, приваривается планка 4 (например, из нержавеющей стали). К последней пластине стопки n пар пластин (например, из нержавеющей стали) приваривается планка 5 также из нержавеющей стали. L0 - рабочая длина первой и последней пластины.
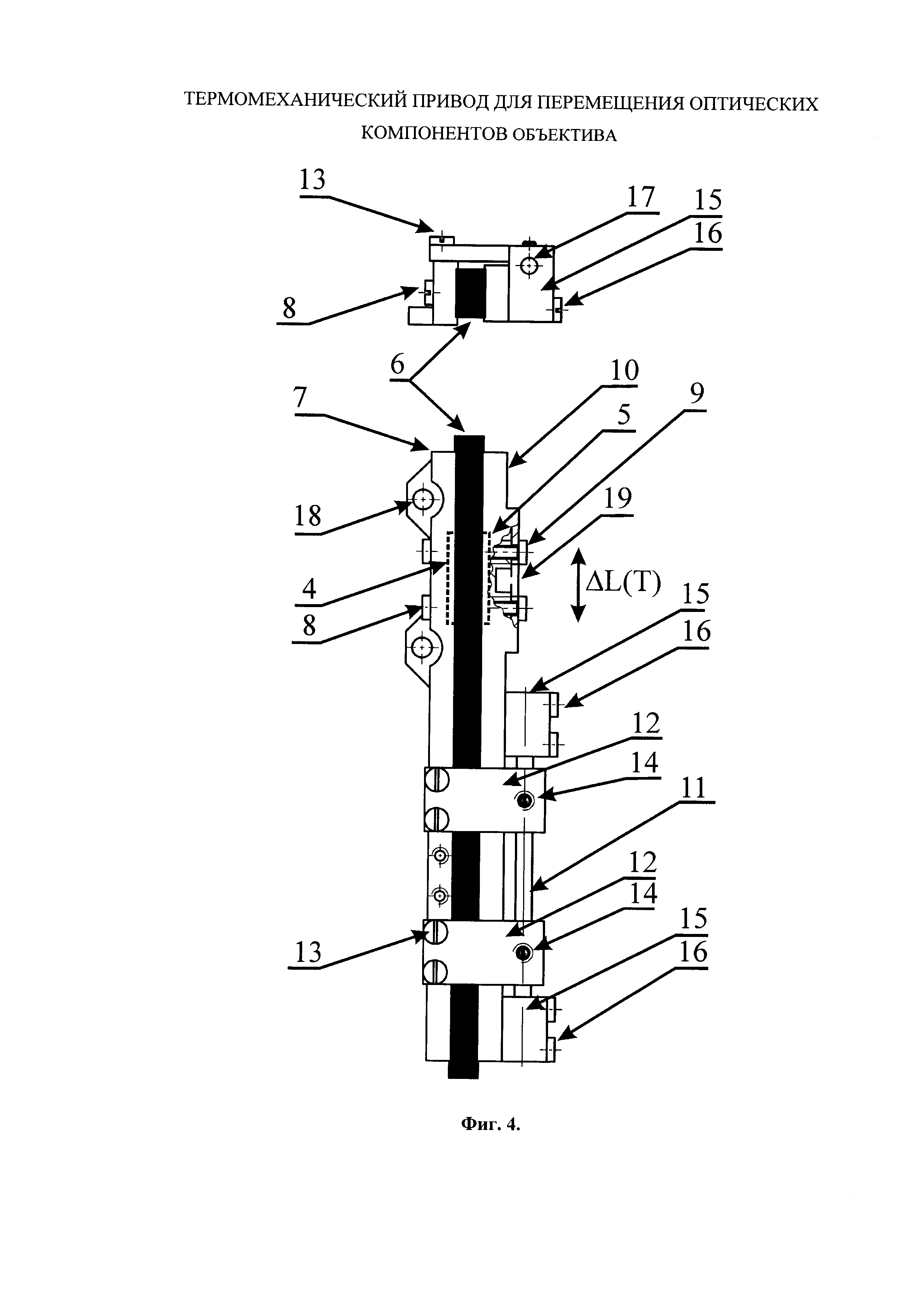
Как показано на фигуре 4, планка 4 используется для закрепления стопки 6 из n пар пластин к неподвижной оправе 7, винтами 8. Оправа 7 в свою очередь крепится к неподвижной части объектива.
Планка 5 используется для закрепления стопки 6 из n пар пластин винтами 9 к подвижной оправе 10 (фигура 4), которая в свою очередь крепится к подвижному компоненту объектива.
Для обеспечения параллельности перемещения подвижной оправы 10 относительно неподвижной оправы 7 применена направляющая 11 в виде стержня цилиндрической или другой формы, которая жестко крепится к неподвижной оправе 7 с помощью двух опор 12, винтами 13 и стопорными винтами 14. Две опоры 15 крепятся к подвижной оправе 10 с помощью винтов 16 и содержат сквозные отверстия 17, расположенные на одной оси, параллельной оптической оси объектива, в которых свободно перемещается направляющая 11. Форма отверстий 17 совпадает с формой сечения направляющей 11. Параллельность неподвижной 7 и подвижной 10 оправ обеспечивается настройкой опор 12 и 15 в зазорах их крепящих винтов. Для крепления термопривода к неподвижной части объектива неподвижная оправа 7 содержит, например, монтажные отверстия 18. Для крепления термопривода к подвижной части объектива подвижная оправа 10 содержит, например, паз 19.
Для полученной таким образом конструкции термопривода справедлива формула:

где L0 - рабочая длина первой и последней пластин термопривода.
Если приравнять величину суммарного перемещения планки 5 от температуры ΔL(T) к величине дефокусировки Δf изображения объектива тепловизора, работающего в широком интервале температур, то можно определить длины L всех пластин термопривода по формуле:

Для образца термопривода, изготовленного по вышеизложенному описанию из пластин ковара (сталь 29НК) и нержавеющей стали (сталь 12Х18Н10Т), при величине дефокусировки Δf=0.98 мм, измеренной по факту для объектива заданной конструкции:
L=80.1 мм,
при этом:
L 0=58 мм;
ΔT=90°C;
n=12 (пар пластин);
α 1=5×10-6 K-1 (сталь 29НК);
α 2=16,6×10-6 K-1 (сталь 12Х18Н10Т).
Таким образом, по сравнению с прототипом предлагаемое изобретение позволяет с помощью термопривода, работающего на эффекте линейного изменения геометрии твердых тел от температуры, обеспечить термокомпенсацию дефокусировки изображения объектива тепловизора, работающего в температурном интервале от минус 40°C до плюс 50°C в пределах ошибки измерения дефокусировки изображения объектива. При этом не требуется дополнительной электроэнергии, двигателей, редукторов, датчиков температуры и других компонентов электропривода.
Устройство работает следующим образом.
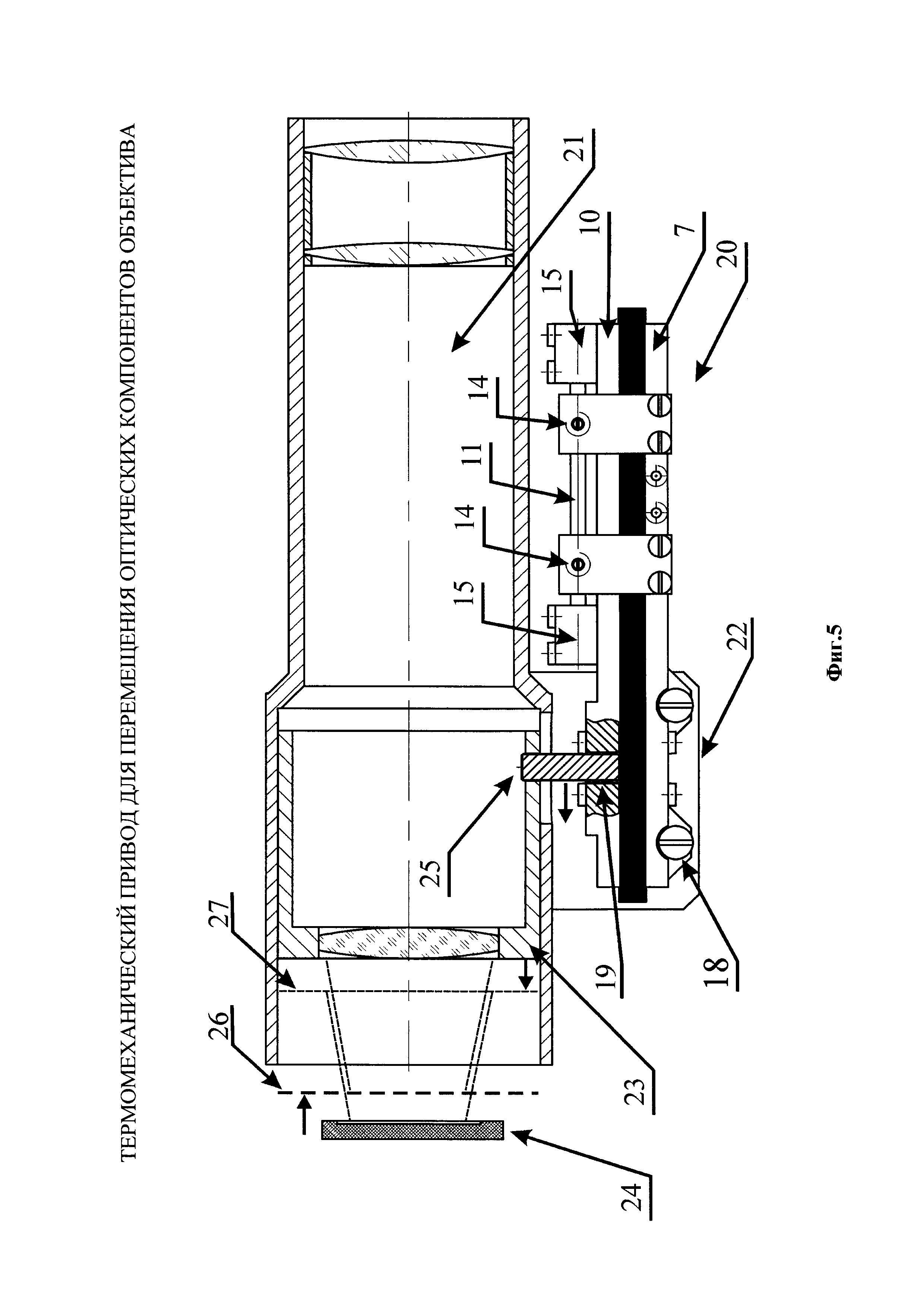
Термопривод 20 (фигура 5) монтируют на объективе 21 таким образом, что его неподвижная оправа 7, например, с помощью винтов и монтажных отверстий 18, крепится к неподвижной части объектива 21, например к посадочному месту 22 на корпусе объектива 21. Подвижная оправа 10, например, с помощью паза 19 крепится к подвижному компоненту объектива 23 либо к фотоприемнику 24, содержащему соответствующий штифт 25, вставляемый в паз 19. Термопривод крепят таким образом, чтобы обеспечить прямолинейное движение подвижного компонента объектива параллельно его оптической оси при изменении температуры. Длину пластин рассчитывают по формуле (4), а ширину и толщину - из прочностных расчетов, обеспечивающих надежность конструкции.
Начальную настройку объектива проводят в нормальных климатических условиях (НКУ) таким образом, чтобы изображение, формируемое объективом 21, совпадало с плоскостью фотоприемника 24, то есть получалось максимально четкое изображение. Далее, при изменении температуры окружающей среды и, следовательно, объектива происходит изменение положения плоскости формируемого изображения 26 из-за изменения оптических параметров линз объектива с температурой. В итоге, плоскость изображения 26 смещается вдоль оптической оси объектива относительно плоскости фотоприемника 24, как показано на фигуре 5. В то же время происходит изменение геометрических размеров пластин, составляющих термопривод 20: подвижная оправа 10 перемещает с помощью штифта 25 подвижную часть 23 объектива 21 в положение 27, возвращая плоскость изображения 26 в плоскость фотоприемника 24. При этом направляющая 11, жестко закрепленная стопорными винтами 14 в неподвижной оправе 7, за счет перемещения в отверстиях опор 15 обеспечивает прямолинейное перемещение подвижной оправы 10 параллельно оптической оси объектива 21.
Таким образом, формируемое изображение при любой температуре совпадает с плоскостью фотоприемника, в итоге достигается эффект термокомпенсации объектива.
Заливной криостат для приемника инфракрасного излучения
Способ изготовления структуры кремний-на-изоляторе
Способ изготовления структуры полупроводник-на-изоляторе
Устройство считывания с временной задержкой и накоплением сигналов с многоэлементных фотоприемников инфракрасного излучения
Способ измерения диффузионной длины неосновных носителей заряда в полупроводниках и тестовая структура для его осуществления
Способ формирования граней чипа для мозаичных фотоприемных модулей
Способ получения слоя фторографена
Датчик магнитного поля и способ его изготовления
Канальная матрица и способ ее изготовления
Резистивный флэш элемент памяти
Матричный преобразователь терагерцевого излучения (варианты)
Тензометрический преобразователь
Тензометрический датчик
Фотоупругий элемент
Тензометрический преобразователь
Устройство обработки сигнала пьезооптического преобразователя
Пироэлектрический детектор миллиметрового излучения (варианты)
Способ контроля параметров движения подъемного устройства
Матричный приемник терагерцового излучения

