Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛЕТОМ, А ТАКЖЕ ЭЛЕКТРОННОЕ УСТРОЙСТВО
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка основа на заявке на патент КНР №201510284823.6, поданной 28 мая 2015 г., полное содержание которой включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Варианты осуществления настоящего изобретения в общем относятся к технической области управления летательным аппаратом и в частности к способу и устройству для управления полетом и электронному устройству.
УРОВЕНЬ ТЕХНИКИ
[0003] Беспилотные летательные аппараты могут использоваться во многих областях, таких как аэрофотосъемка, транспортировка грузов и тому подобное, и имеют такие характеристики, как низкая стоимость, малый размер, высокая гибкость и тому подобное. С помощью беспроводной связи между летательным аппаратом и устройством дистанционного управления пользователь может управлять полетом летательного аппарата для осуществления необходимой цели полета.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Варианты осуществления настоящего изобретения предлагают способ и устройство для управления полетом и электронное устройство, которые предназначены для решения проблем в предшествующем уровне техники.
[0005] В соответствии с первым аспектом вариантов осуществления настоящего изобретения предлагается способ управления полетом, включающий в себя следующее:
[0006] определяют соотношение взаимного положения между летательным аппаратом и устройством управления;
[0007] определяют полярную систему координат с устройством управления в начале координат в соответствии с соотношением взаимного положения;
[0008] принимают команду управления направлением полета, посланную устройством управления, при этом команду управления направлением полета генерируют на основе полярной системы координат; и
[0009] в соответствии с координатной информацией о летательном аппарате в полярной системе координат, управляют летательным аппаратом для полета в соответствии с командой управления направлением полета.
[0010] Опционально, шаг, на котором летательным аппаратом управляют для полета в соответствии с командой управления направлением полета, может включать в себя следующее:
[0011] когда команда управления направлением полета относится к полету вперед или полету назад, летательным аппаратом управляют для полета вдоль линии, соединяющей летательный аппарат и устройство управления, таким образом, что значение расстояния в координатной информации изменяется, а значение угла в координатной информации не изменяется.
[0012] Опционально, шаг, в котором летательным аппаратом управляют для полета в соответствии с командой управления направлением полета, может включать в себя следующее:
[0013] когда команда управления направлением полета относится к левому повороту или правому повороту, летательным аппаратом управляют для полета в направлении, перпендикулярном линии, соединяющей летательный аппарат и устройство управления, таким образом, что значение угла в координатной информации изменяется, а значение расстояния в координатной информации не изменяется.
[0014] Опционально, шаг, на котором летательным аппаратом управляют для полета в соответствии с командой управления направлением полета, может включать в себя следующее:
[0015] когда команда управления направлением полета относится к полету под косым углом, извлекают прямой компонент и вращательный компонент, содержащиеся в команде управления направлением полета, при этом прямой компонент соответствует полету вперед или полету назад летательного аппарата, а вращательный компонент соответствует левому повороту или правому повороту полета; и
[0016] летательным аппаратом управляют в соответствии с прямым компонентом и вращательным компонентом таким образом, что значение расстояния в координатной информации изменяется в соответствии с прямым компонентом, а значение угла в координатной информации изменяется в соответствии с вращательным компонентом.
[0017] Опционально, шаг, на котором определяют соотношение взаимного положения между летательным аппаратом и устройством управления, может включать в себя следующее:
[0018] измерительный сигнал, передаваемый устройством приемопередачи сигналов в устройстве управления, принимают соответственно посредством множества устройств измерения сигналов, установленных в различных местоположениях на летательном аппарате;
[0019] интенсивности сигналов, измеренных соответственно устройствами измерения сигналов, сравнивают, при этом проекции устройства измерения сигнала, соответствующего самой высокой интенсивности сигнала, устройства измерения сигнала, соответствующего самой низкой интенсивности сигнала, и устройства управления, на вертикальное направление располагаются на одной прямой линии, а устройство измерения сигнала, соответствующее самой высокой интенсивности сигнала, и устройство управления являются соседними узловыми точками на прямой линии; и
[0020] соотношение взаимного положения определяют в соответствии с местоположениями устройств измерения сигналов на летательном аппарате.
[0021] Опционально, шаг, на котором определяют соотношение взаимного положения, может включать в себя следующее:
[0022] сигналы обнаружения передают к устройству приемопередачи сигналов в устройстве управления одновременно посредством множества устройств передачи сигналов, установленных в различных местоположениях на летательном аппарате;
[0023] сигнал обнаружения, первым принятый устройством приемопередачи сигналов, и сигнал обнаружения, последним принятый устройством приемопередачи сигналов, определяют в соответствии с принятым ответным сообщением, возвращенным устройством приемопередачи сигналов, при этом проекции устройств передачи сигналов, соответствующих сигналам обнаружения, и устройства управления на вертикальное направление расположены на одной и той же прямой линии, а устройство передачи сигналов, соответствующее первому принятому сигналу обнаружения, и устройство управления являются соседними узловыми точками на этой прямой линии; и
[0024] соотношение взаимного положения определяют в соответствии с местоположениями устройств передачи сигналов на летательном аппарате.
[0025] Опционально, шаг, на котором определяют соотношение взаимного положения между летательным аппаратом и устройством управления, может включать в себя следующее:
[0026] первую информацию позиционирования о летательном аппарате считывают с помощью первого устройства позиционирования, установленного на летательном аппарате;
[0027] принимают вторую информацию позиционирования, переданную устройством приемопередачи сигналов в устройстве управления, при этом вторая информация позиционирования генерируется вторым устройством позиционирования в устройстве управления; и
[0028] соотношение взаимного положения определяют в соответствии с первой информацией позиционирования и второй информацией позиционирования.
[0029] Опционально, способ может дополнительно включать в себя следующее:
[0030] считывают тип идентификатора, содержащийся в команде управления направлением полета; и
[0031] определяют тип команды управления направлением полета в соответствии с типом идентификатора, при этом, когда тип идентификатора имеет первое значение, это указывает, что команда управления направлением полета генерируется на основе полярной системы координат; а когда тип идентификатора имеет второе значение, это указывает, что команда управления направлением полета генерируется на основе полетной системы координат летательного аппарата, так что команду управления направлением полета непосредственно выполняют для того, чтобы управлять летательным аппаратом.
[0032] Опционально, шаг, в котором летательным аппаратом управляют для полета в соответствии с командой управления направлением полета, может включать в себя следующее:
[0033] целевое направление, соответствующее команде управления направлением полета, преобразуют из полярной системы координат в полетную систему координат летательного аппарата; и
[0034] летательным аппаратом управляют в соответствии с преобразованным целевым направлением.
[0035] В соответствии со вторым аспектом вариантов осуществления настоящего изобретения предложено устройство для управления полетом, содержащее:
[0036] блок определения соотношения, выполненный с возможностью определять соотношение взаимного положения между летательным аппаратом и устройством управления;
[0037] блок определения системы координат, выполненный с возможностью определять полярную систему координат с устройством управления в начале координат в соответствии с соотношением взаимных положения;
[0038] приемный блок, выполненный с возможностью принимать команду управления направлением полета, посланную устройством управления, при этом команду управления направлением полета генерируют на основе полярной системы координат; и
[0039] блок управления, выполненный с возможностью управлять, в соответствии с координатной информацией о летательном аппарате в полярной системе координат, летательным аппаратом для полета в соответствии с командой управления направлением полета.
[0040] Опционально, блок управления может содержать.
[0041] первый субблок управления, выполненный с возможностью, когда команда управления направлением полета относится к полету вперед или полету назад, управлять летательным аппаратом для полета вдоль линии, соединяющей летательный аппарат и устройство управления, таким образом, что значение расстояния в координатной информации изменяется, а значение угла в координатной информации не изменяется.
[0042] Опционально, блок управления может содержать:
[0043] второй субблок управления, выполненный с возможностью, когда команда управления направлением полета относится к левому повороту или правому повороту, управлять летательным аппаратом для полета по направлению, перпендикулярному линии, соединяющей летательный аппарат и устройство управления, таким образом, что значение угла в координатной информации изменяется, а значение расстояния в координатной информации не изменяется.
[0044] Опционально, блок управления может содержать:
[0045] субблок извлечения, выполненный с возможностью, когда команда управления направлением полета относится к полету под косым углом, извлекать прямой компонент и вращательный компонент, содержащиеся в команде управления направлением полета, при этом прямой компонент соответствует полету вперед или полету назад летательного аппарата, а вращательный компонент соответствует левому повороту или правому повороту полета; и
[0046] третий субблок управления, выполненный с возможностью управлять летательным аппаратом в соответствии с прямым компонентом и вращательным компонентом таким образом, что значение расстояния в координатной информации изменяется в соответствии с прямым компонентом, а значение угла в координатной информации изменяется в соответствии с вращательным компонентом.
[0047] Опционально, блок определения соотношения может содержать:
[0048] субблок измерения, выполненный с возможностью измерять измерительный сигнал, передаваемый устройством приемопередачи сигналов в устройстве управления, с помощью множества устройств измерения сигналов, установленных в различных местоположениях на летательном аппарате;
[0049] субблок сравнения, выполненный с возможностью сравнивать интенсивности сигналов, измеренных соответственно устройствами измерения сигналов, при этом проекции устройства измерения сигнала, соответствующего самой высокой интенсивности сигнала, устройства измерения сигнала, соответствующего самой низкой интенсивности сигнала, и устройства управления, на вертикальное направление расположены на одной и той же прямой линии, причем устройство измерения сигнала, соответствующее самой высокой интенсивности сигнала, и устройство управления являются соседними узловыми точками на этой прямой линии; и
[0050] первый субблок определения соотношения, выполненный с возможностью определять соотношение взаимного положения в соответствии с местоположениями устройств измерения сигналов на летательном аппарате.
[0051] Опционально, блок определения соотношения может содержать:
[0052] субблок отправки, выполненный с возможностью отправлять сигналы обнаружения к устройству приемопередачи сигналов в устройстве управления одновременно посредством множества устройств передачи сигналов, установленных в различных местоположениях на летательном аппарате;
[0053] субблок определения устройства, выполненный с возможностью определять сигнал обнаружения, первым принятый устройством приемопередачи сигналов, и сигнал обнаружения, последним принятый устройством приемопередачи сигналов, в соответствии с принятым ответным сообщением, возвращенным устройством приемопередачи сигналов, при этом проекции устройств передачи сигналов, соответствующих сигналам обнаружения, и устройства управления, на вертикальное направление расположены на одной и той же прямой линии, причем устройство передачи сигналов, соответствующее первому принятому сигналу обнаружения, и устройство управления являются соседними узловыми точками на этой прямой линии; и
[0054] второй субблок определения соотношения, выполненный с возможностью определять соотношение взаимного положения в соответствии с местоположениями устройств передачи сигналов на летательном аппарате.
[0055] Опционально, блок определения соотношения может содержать:
[0056] субблок считывания, выполненный с возможностью считывать первую информацию позиционирования о летательном аппарате посредством первого устройства позиционирования, установленного на летательном аппарате;
[0057] приемный субблок, выполненный с возможностью принимать вторую информацию позиционирования, посланную устройством приемопередачи сигналов в устройстве управления, при этом вторую информацию позиционирования генерируют вторым устройством позиционирования в устройстве управления; и
[0058] третий субблок определения соотношения, выполненный с возможностью определять соотношение взаимного положения в соответствии с первой информацией позиционирования и второй информацией позиционирования.
[0059] Опционально, устройство может дополнительно содержать:
[0060] блок считывания, выполненный с возможностью считывать идентификатор типа, содержащийся в команде управления направлением полета; и
[0061] блок определения, выполненный с возможностью определять тип команды управления направлением полета в соответствии с идентификатором типа, в котором, когда идентификатор типа имеет первое значение, это указывает, что команда управления направлением полета генерируется на основе полярной системы координат; а когда идентификатор типа имеет второе значение, это указывает, что команда управления направлением полета генерируется на основе полетной системы координат летательного аппарата, так что блок управления непосредственно выполняет команду управления направлением полета, чтобы управлять летательным аппаратом.
[0062] Опционально, блок управления может содержать:
[0063] субблок преобразования, выполненный с возможностью преобразовывать целевое направление, соответствующее команде управления направлением полета, из полярной системы координат в полетную систему координат летательного аппарата; и
[0064] четвертый субблок управления, выполненный с возможностью управлять летательным аппаратом в соответствии с преобразованным целевым направлением.
[0065] В соответствии с третьим аспектом вариантов осуществления настоящего изобретения предлагается электронное устройство, содержащее:
[0066] процессор; и
[0067] память, выполненную с возможностью хранить команды, исполняемые процессором,
[0068] где процессор выполнен с возможностью:
[0069] определять соотношение взаимного положения между летательным аппаратом и устройством управления;
[0070] определять полярную систему координат с устройством управления в начале координат в соответствии с соотношением взаимного положения;
[0071] принимать команду управления направлением полета, посланную устройством управления, при этом команду управления направлением полета генерируют на основе полярной системы координат; и
[0072] управлять, в соответствии с координатной информацией о летательном аппарате в полярной системе координат, летательным аппаратом для полета в соответствии с командой управления направлением полета.
[0073] Технические решения, предложенные в вариантах осуществления настоящего изобретения, могут иметь следующие положительные эффекты.
[0074] Из приведенных выше вариантов осуществления можно видеть, что при установлении полярной системы координат с пользователем в начале координат и принятии команды управления направлением полета на основе полярной системы координат варианты осуществления настоящего изобретения дают возможность пользователю принимать самого себя в качестве центра в процессе управления, без учета позиции летательного аппарата и без управления с позиции летательного аппарата, тем самым упрощая операции управления и уменьшая трудности в управлении летательным аппаратом.
[0075] Следует понимать, что вышеуказанное общее описание и последующее подробное описание являются только примерами и пояснениями и не ограничивают настоящее изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0076] Прилагаемые чертежи, которые включены в состав настоящего описания и составляют его часть, иллюстрируют варианты осуществления в соответствии с настоящим изобретением и вместе с описанием служат для объяснения принципов вариантов осуществления изобретения.
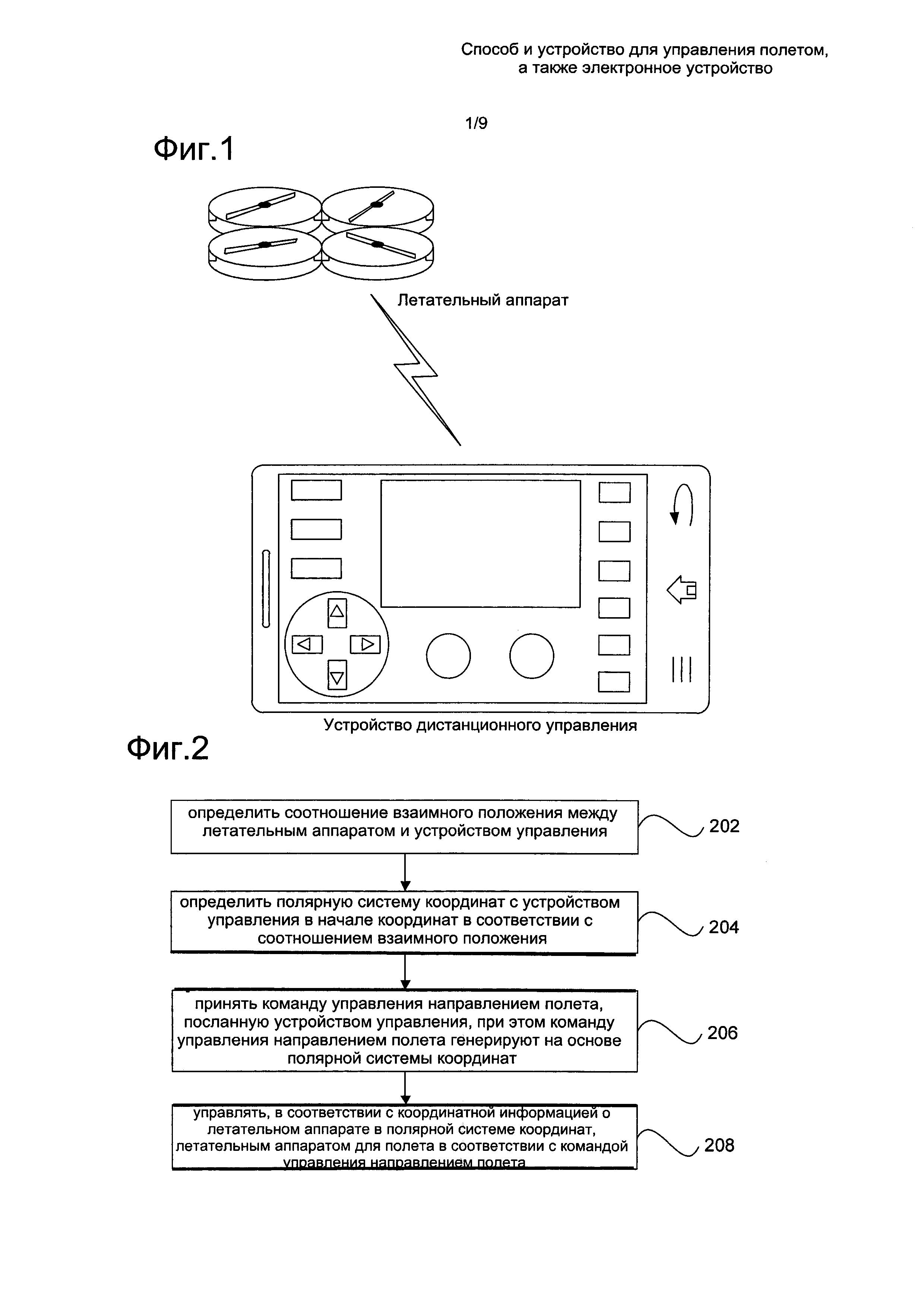
[0077] Фиг. 1 представляет схематическое изображение, иллюстрирующее сценарий управления полетом в соответствии с примером осуществления.
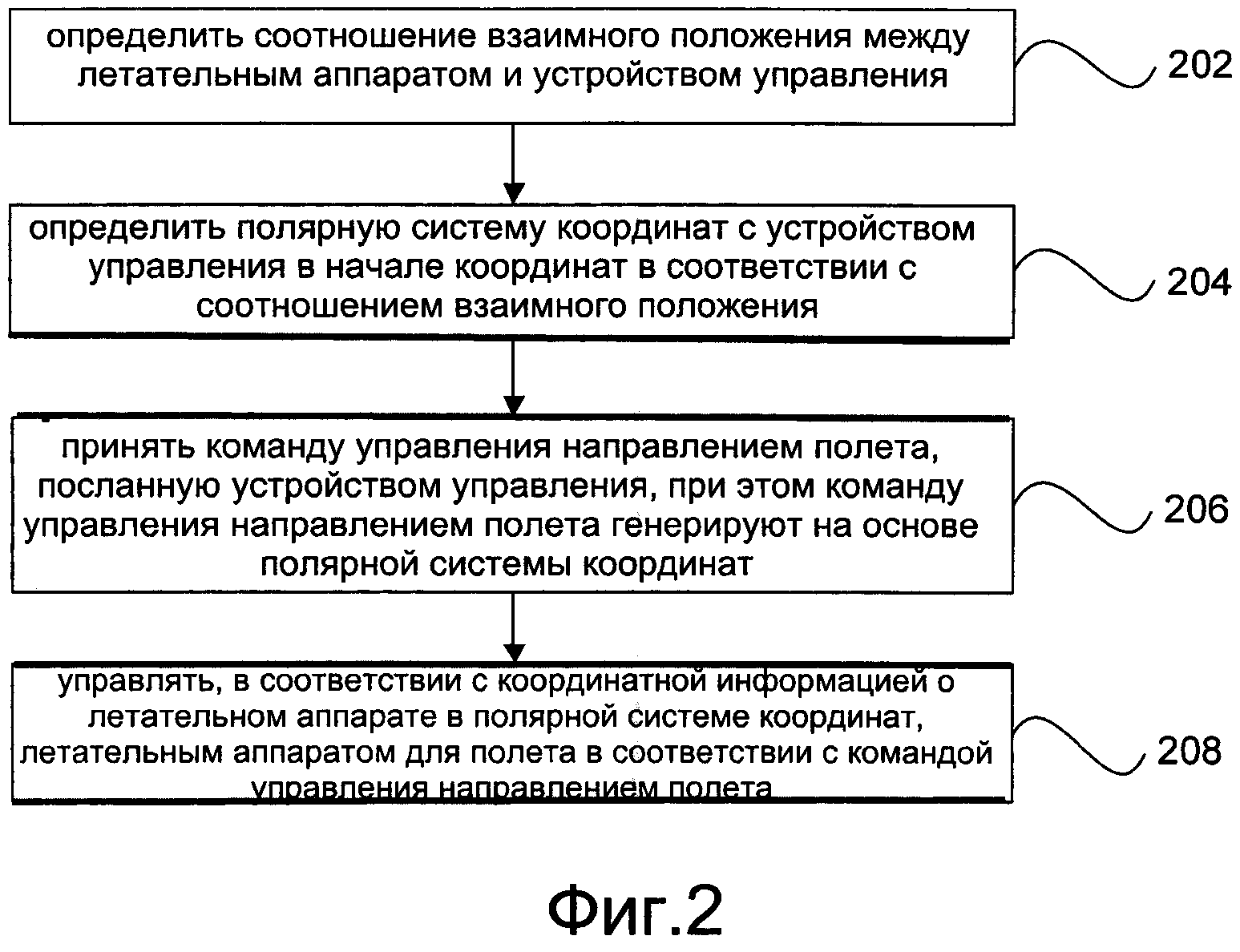
[0078] Фиг. 2 представляет блок-схему, показывающую способ управления полетом в соответствии с примером осуществления.
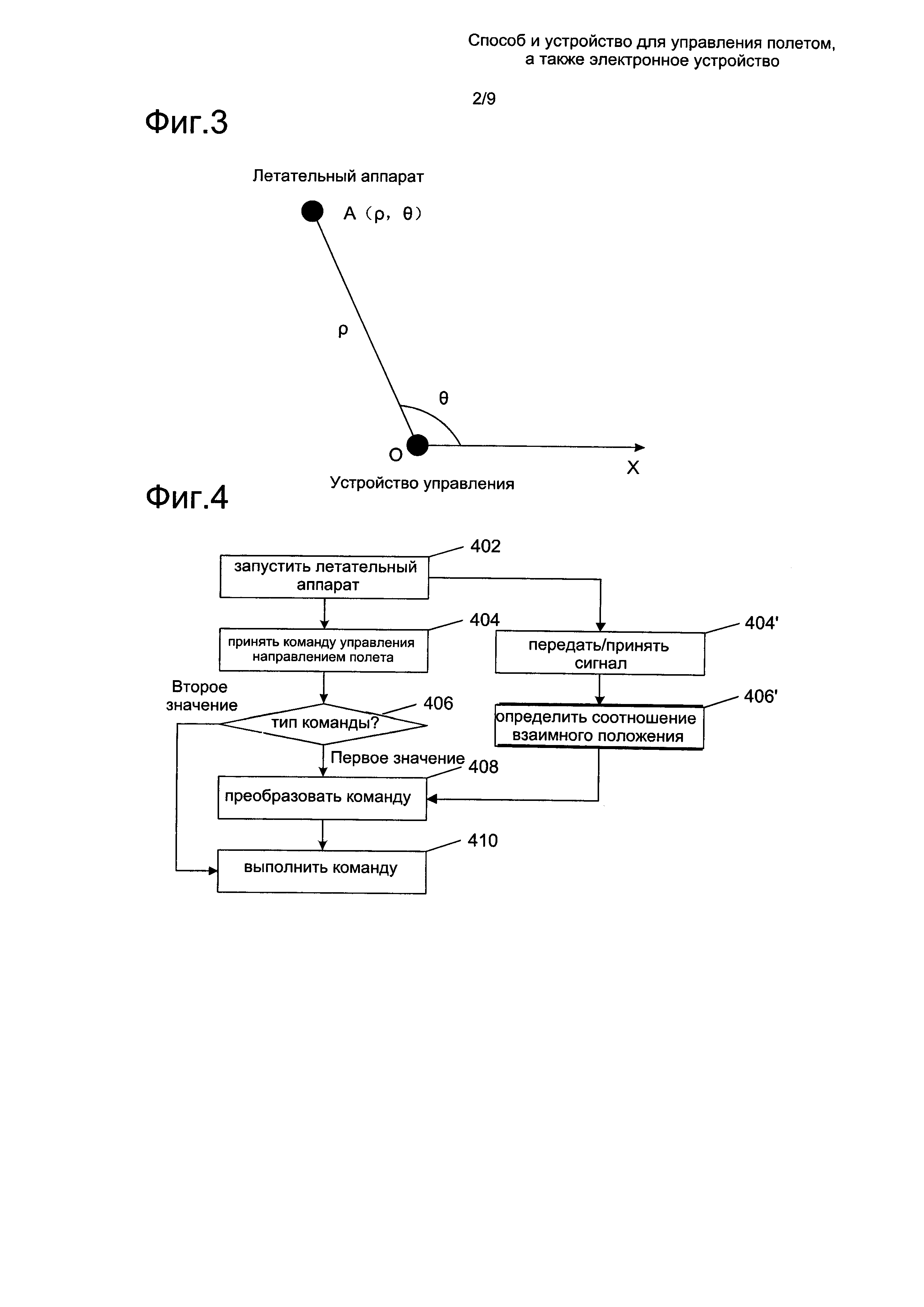
[0079] Фиг. 3 представляет схему, иллюстрирующую соотношение координат для управления полетом в соответствии с примером осуществления.
[0080] Фиг. 4 представляет другую блок-схему, показывающую способ управления полетом в соответствии с примером осуществления.
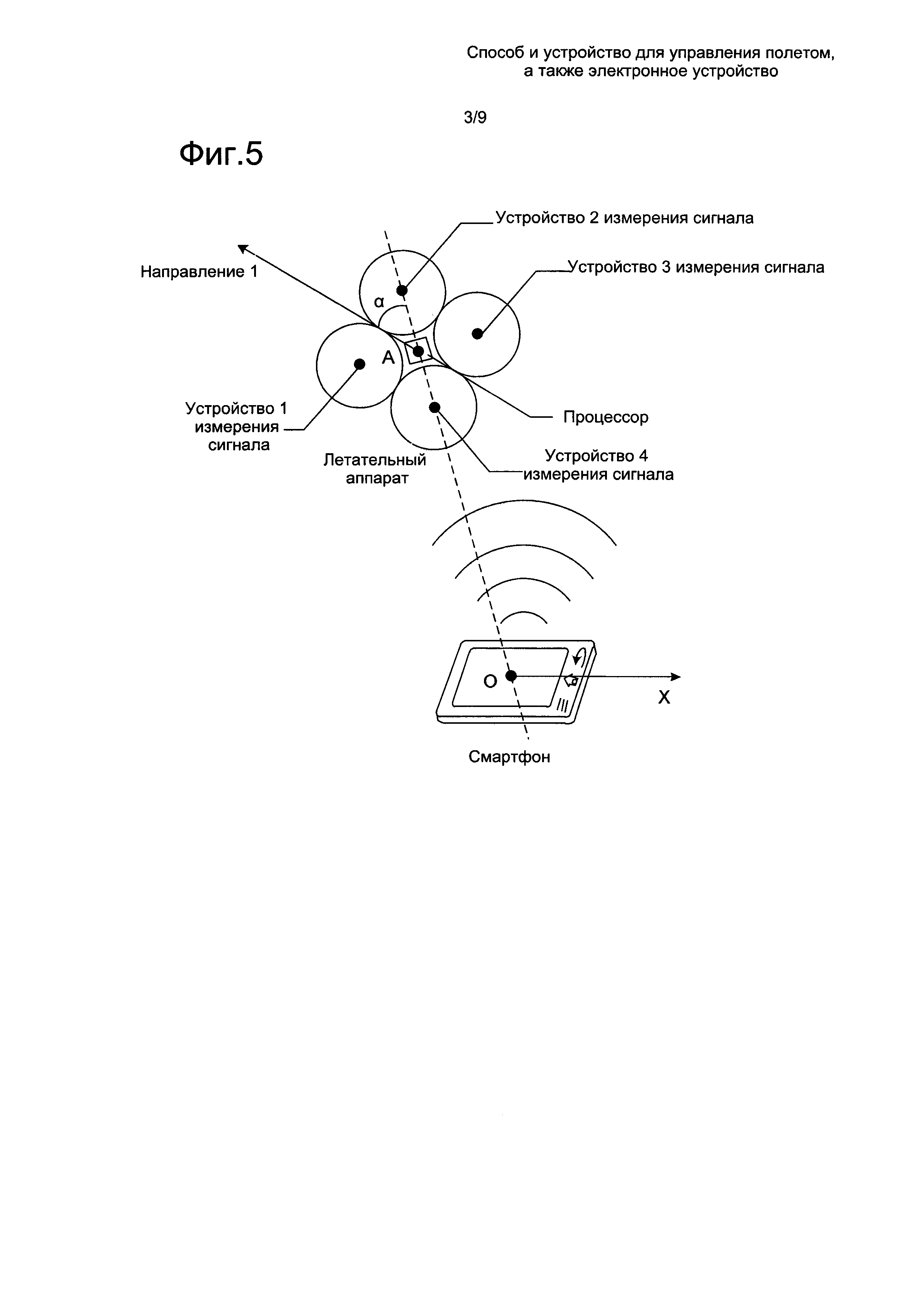
[0081] Фиг. 5 представляет схему, иллюстрирующую определение соотношения взаимного положения в соответствии с примером осуществления.
[0082] Фиг. 6 представляет другую схему, иллюстрирующую определение соотношения взаимного положения в соответствии с примером осуществления.
[0083] Фиг. 7 представляет схему, иллюстрирующую управление полетом в соответствии с примером осуществления.
[0084] Фиг. 8 представляет другую схему, иллюстрирующую управление полетом в соответствии с примером осуществления.
[0085] Фиг. 9 представляет еще одну схему, иллюстрирующую управление полетом в соответствии с примером осуществления
[0086] Фиг. 10-18 представляют структурные схемы устройства для управления полетом в соответствии с примером осуществления.
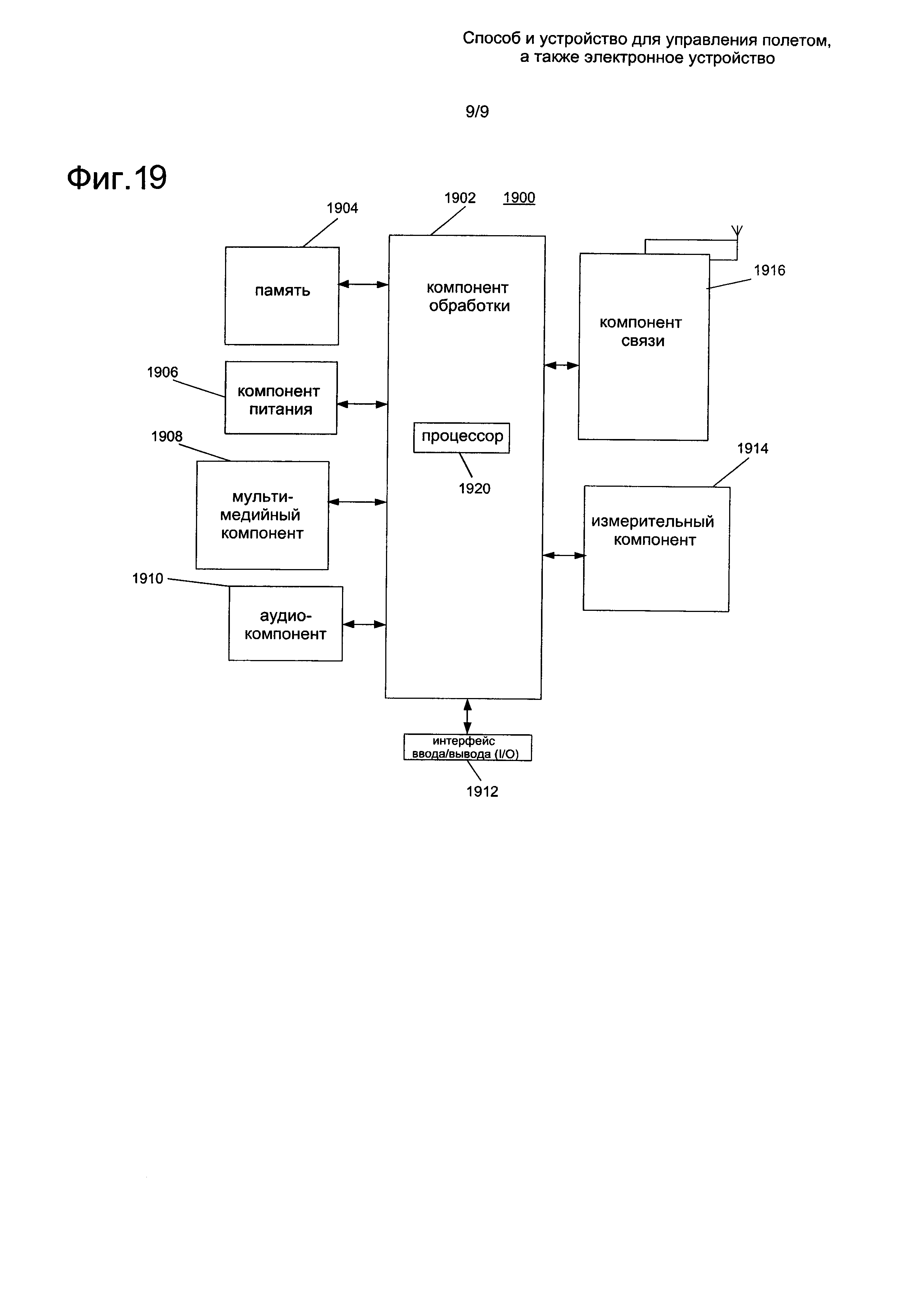
[0087] Фиг. 19 представляет структурную схему, иллюстрирующую устройство для управления полетом в соответствии с примером осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0088] Теперь будет приведено подробное описание вариантов осуществления, примеры которых проиллюстрированы на прилагаемых чертежах. Последующее описание относится к прилагаемым чертежам, на которых одинаковые номера на различных чертежах представляют одинаковые или подобные элементы, если не указано иное. Реализации, изложенные в последующем описании примеров осуществления, не представляют всех вариантов осуществления настоящего изобретения. Напротив, они являются только примерами устройств и способов в соответствии с аспектами, относящимися к вариантам осуществления настоящего изобретения, как изложено в прилагаемой формуле изобретения.
[0089] На фиг. 1 представлена схема, иллюстрирующая сценарий управления полетом в соответствии с примером осуществления. Как показано на фиг. 1, передача сигнала осуществляется беспроводным образом между устройством дистанционного управления и летательным аппаратом. После того, как пользователь отправляет команду управления на летательный аппарат с помощью устройства дистанционного управления, этим летательным аппаратом можно управлять для осуществления полета.
[0090] В существующем уровне техники, когда пользователь посылает команду управления, в частности команду управления направлением полета, на летательный аппарат с помощью устройства дистанционного управления, управление полетом должно осуществляться с позиции летательного аппарата. Например, когда команда управления направлением полета относится к левому повороту, она должна быть интерпретирована таким образом, что летательный аппарат поворачивается в левую сторону относительно самого летательного аппарата. Однако, когда летательный аппарат улетает далеко и трудно наблюдать ориентацию этого летательного аппарата или когда летательный аппарат представляет собой четырехосную конструкцию, показанную на фиг. 1, пользователь часто может не различить положения летательного аппарата в реальном времени, тем самым затрудняется осуществление управление с позиции летательного аппарата.
[0091] Следовательно, варианты осуществления настоящего изобретения путем улучшения управления полетом в отношении летательного аппарата решают вышеупомянутые технические проблемы, существующие в данной области техники.
[0092] На фиг. 2 представлена блок-схема, иллюстрирующая способ управления полетом в соответствии с примером осуществления. Как показано на фиг. 1, способ применяется к летательному аппарату и может включать в себя следующие шаги.
[0093] На шаге 202 определяют соотношение взаимного положения между летательным аппаратом и устройством управления.
[0094] В настоящем варианте осуществления, в качестве примера реализации, летательный аппарат может получать соотношение взаимного положения в соответствии с заранее заданным периодом времени или, в качестве другого примера реализации, летательный аппарат может получать соотношение взаимного положения всякий раз при приеме команды управления направлением полета.
[0095] На шаге 204, определяют полярную систему координат с устройством управления в начале координат в соответствии с соотношением взаимного положения.
[0096] На шаге 206, принимают команду управления направлением полета, посланную устройством управления, при этом команду управления направлением полета генерируют на основе полярной системы координат.
[0097] В настоящем варианте осуществления устройство управления посылает данные, например команду управления направлением полета, и другие типы команд или информацию на летательный аппарат с помощью устройства приемопередачи сигналов, и это устройство приемопередачи сигналов может быть встроено в устройство дистанционного управления. Передача данных может быть осуществлена между летательным аппаратом и устройством дистанционного управления любым беспроводным способом, например WiFi или Bluetooth, и нет никаких специальных ограничений в данном варианте осуществления изобретения.
[0098] В настоящем варианте осуществления изобретения, поскольку команда управления направлением полета генерируется на основе полярной системы координат и начало полярной системы координат расположено в устройстве управления, управление полетом летательного аппарата осуществляется, в действительности, принятием устройства управления в качестве центра без необходимости рассматривать положение в реальном времени (например ориентацию) летательного аппарата, а летательный аппарат может сам настроиться в соответствии с целевым направлением, соответствующим команде управления направлением полета.
[0099] На шаге 208, в соответствии с координатной информацией о летательном аппарате в полярной системе координат летательным аппаратом управляют для полета в соответствии с командой управления направлением полета.
[00100] Как показано на фиг. 3, предполагается, что устройство управления находится в точке О, и устанавливается полярная система координат ОХ с точкой О в качестве начала координат. Летательный аппарат может получить координатную информацию о самом летательном аппарате в полярной системе координат ОХ в соответствии с соотношением взаимного положения между самим летательным аппаратом и устройством управления. Предполагается, что летательный аппарат находится в точке А и координатной информацией является (ρ, θ), тогда управляющее устройство может не рассматривать, преследуя цель управления полетом для летательного аппарата, аспекты, например положение летательного аппарата в реальном времени, и вместо этого может послать команду управления направлением полета методом самоцентрирования, и летательному аппарату необходимо только преобразовать команду управления направлением полета в корректировку координатной информации о самом летательном аппарате. Например, в качестве примера реализации, летательный аппарат может осуществить полет, преобразуя целевое направление, соответствующее команде управления направлением полета из полярной системы координат в полетную систему координат самого летательного аппарата, и таким образом выполняя преобразованное целевое направление.
[00101] В настоящем варианте осуществления команда управления направлением полета сконфигурирована с возможностью управлять направлением полета летательного аппарата, в том числе направлением вперед, направлением назад, направлением влево и направлением вправо в плоскости, и исключая направление вверх и направление вниз в трехмерном пространстве.
[00102] Из приведенных выше вариантов осуществления можно видеть, что при выполнении преобразования координат в отношении целевого направления, соответствующего команде управления направлением полета, варианты осуществления настоящего изобретения позволяют пользователю выполнять управление непосредственно в соответствии с его собственной целью управления, не преобразуя цели управления с позиции летательного аппарата, тем самым значительно уменьшая трудности в управлении летательным аппаратом.
[00103] На фиг. 4 представлена другая блок-схема, показывающая способ управления полетом в соответствии с примером осуществления. Как показано на фиг. 4, способ может включать в себя следующие шаги.
[00104] На шаге 402, летательный аппарат начинает лететь.
[00105] На шаге 404, летательный аппарат принимает команду управления направлением полета, посланную устройством управления.
[00106] В настоящем варианте осуществления передача и прием сигналов между устройством управления и летательным аппаратом может осуществляться с помощью устройства дистанционного управления. Например, устройством дистанционного управления может быть специализированное дистанционное управление летательным аппаратом или оно может быть реализовано с помощью приложения, установленного на смарт-устройстве, например смартфоне или планшетном компьютере, в данном документе беспроводные сигналы могут передаваться и приниматься между устройством дистанционного управления и летательным аппаратом с помощью WiFi, Bluetooth и тому подобного.
[00107] На шаге 406, соответствующий тип команды идентифицируют путем считывания значения идентификатора типа в команде управления направлением полета. Когда идентификатор типа имеет первое значение, это указывает, что целевое направление получают на основе полярной системы координат и необходимо переходить к шагу 408. Когда идентификатор типа имеет второе значение, это указывает, что целевое направление получают на основании полетной системы координат летательного аппарата и необходимо переходить к шагу 410.
[00108] В настоящем варианте осуществления устройство управления служит в качестве начала полярной системы координат, а летательный аппарат служит в качестве начала полетной системы координат. Когда устройство управления посылает команду управления направлением полета на основе полярной системы координат, соответствующее целевое направление получают на основе полярной системы координат, тем самым способствуя осуществлению эффективного управления полетом пользователем, когда ему трудно различить положения летательного аппарата (в частности, четырехосного летательного аппарата). Однако необходимо, чтобы летательный аппарат преобразовал соответствующее целевое направление в целевое направление в его полетной системе координат так, чтобы полетное задание после этого могло быть правильно выполнено летательным аппаратом. Когда устройство управления посылает команду управления направлением полета на основе полетной системы координат, соответствующее целевое направление получают на основе полетной системы координат, т.е. пользователь посылает команду управления направлением полета с позиции летательного аппарата, и летательный аппарат может непосредственно исполнить соответствующую команду управления направлением полета так, чтобы правильно выполнить полетное задание.
[00109] В настоящем варианте осуществления в устройстве дистанционного управления может быть предусмотрен соответствующий переключатель формата команды, так что пользователь посылает необходимый тип команды управления направлением полета с помощью этого переключателя.
[00110] В настоящем варианте осуществления формат команды управления может быть установлен заранее, и один или более битов данных в команде управления служат в качестве идентификатора типа, который может таким образом представлять режим управления для пользователя. Предполагается, что идентификатор типа содержит два бита данных, целевое направление в команде управления направлением полета получают на основе полярной системы координат, когда идентификатором типа является '00', т.е. первое значение, и целевое направление в команде управления направлением полета получают на основе полетной системы координат, когда идентификатором типа является '01', т.е. второе значение.
[00111] На шаге 404', между летательным аппаратом и устройством управления выполняют операции передачи и приема.
[00112] На шаге 406', летательный аппарат определяет соотношение взаимного положения между летательным аппаратом и устройством управления в соответствии с условиями передачи и приема сигналов.
[00113] В настоящем варианте осуществления соотношение взаимного положения между летательным аппаратом и устройством управления определяют с помощью шагов 404-406', и здесь нет ограничений на последовательность между шагами 404-406' и шагами 404-406. Летательный аппарат может выполнить шаги 404-406' в соответствии с заранее заданным режимом, например, летательный аппарат может выполнить шаги 404'-406' в соответствии с заранее заданным периодом времени или может выполнить шаги 404'-406' после получения команды управления направлением полета.
[00114] В настоящем варианте осуществления соотношение взаимного положения между летательным аппаратом и устройством управления может быть определено на основе передачи и приема сигналов между летательным аппаратом и устройством управления (а именно устройством дистанционного управления). Некоторые режимы для определения соотношения взаимного положения проиллюстрированы ниже на основе вышеуказанных режимов передачи и приема сигналов.
[00115] Реализация 1
[00116] В качестве примера осуществления измерительный сигнал, переданный устройством приемопередачи сигналов в устройстве управления, измеряют соответственно с помощью множества устройств измерения сигналов, установленных в различных местоположениях на летательном аппарате. Интенсивности сигналов, измеренных соответственно с помощью устройств измерения сигналов сравнивают, при этом проекции устройства измерения сигнала, соответствующего самой высокой интенсивности сигнала, устройства измерения сигнала, соответствующего самой низкой интенсивности сигнала, и устройства управления на вертикальное направление расположены на одной и той же прямой линии, а устройство измерения сигнала, соответствующее самой высокой интенсивности сигнала, и устройство управления являются соседними узловыми точками на этой прямой линии. Соотношение взаимного положения определяют в соответствии с местоположениями установки устройств измерения сигналов на летательном аппарате.
[00117] Как показано на фиг. 5, предполагается, что пользователь берет смартфон в качестве устройства дистанционного управления с тем, чтобы осуществить дистанционное управление летательным аппаратом. Смартфон выполнен с устройство приемопередачи сигналов для любого беспроводного сигнала, и измерительный сигнал посылают с помощью этого устройства приемопередачи сигналов. Множество устройств измерения сигналов установлены в различных местоположениях на летательном аппарате. Например, в четырехосном летательном аппарате, показанном на фиг. 5, предусмотрены устройство 1 измерения сигнала, устройство 2 измерения сигнала, устройство 3 измерения сигнала, устройство 4 измерения сигнала и тому подобное. Каждое устройство измерения сигнала измеряет вышеупомянутый измерительный сигнал и сообщает процессору летательного аппарата измеренную интенсивность сигнала, и процессор сравнивает интенсивности сигналов для определения устройства измерения сигнала, соответствующего самой высокой интенсивности сигнала, и устройства измерения сигнала, соответствующего самой низкой интенсивности сигнала.
[00118] Предположим, что интенсивность сигнала, измеренная устройством 4 измерения сигнала, является самой высокой, а интенсивность сигнала, измеренная устройством 2 измерения сигнала, является самой низкой, и будем считать, что проекции устройства управления (именно, устройства дистанционного управления, например смартфона на фиг. 5), устройства 4 измерения сигнала и устройства 2 измерения сигнала на вертикальное направление расположены на одной прямой линии. Летательный аппарат может полагать, что ориентацией устройства управления является определенное фиксированное направление, и полярная координатная система может быть определена соответственно, как, например, полярная координатная система ОХ, показанная на фиг. 5.
[00119] Предположим, что летательный аппарат находится в точке А (ρ, θ) в полярной системе координат ОХ, где р является расстоянием OA и может быть вычислено в соответствии с измеренными интенсивностями сигналов с помощью устройства 4 измерения сигнала и устройства 2 измерения сигнала (например, соотношения между интенсивностями измеренных сигналов и расстояниями сохранены заранее). Либо может быть принят режим относительного расстояния. Например, точка А, записанная в определенный момент, служит в качестве начала координат, поэтому последующее изменение расстояния принимается в качестве относительного изменения расстояния по отношению к точке А. 6 является внутренним углом между OA и ОХ и может быть получен расчетным путем после того, как определяют ориентацию полярной оси (а именно, оси X) полярной системы координат ОХ.
[00120] Кроме того, так как местоположение установки каждого устройства измерения сигнала на летательном аппарате определено заранее, текущее положение летательного аппарата и угол а отклонения между направлением 1, куда смотрит летательный аппарат, и лучом OA может быть получен на основе координатного положения точки А в полярной системе координат ОХ, так что в процессе управления полетом летательного аппарата угол а отклонения может быть принят во внимание, и нет необходимости для устройства управления получать положение летательного аппарата в реальном времени.
[00121] Реализация 2
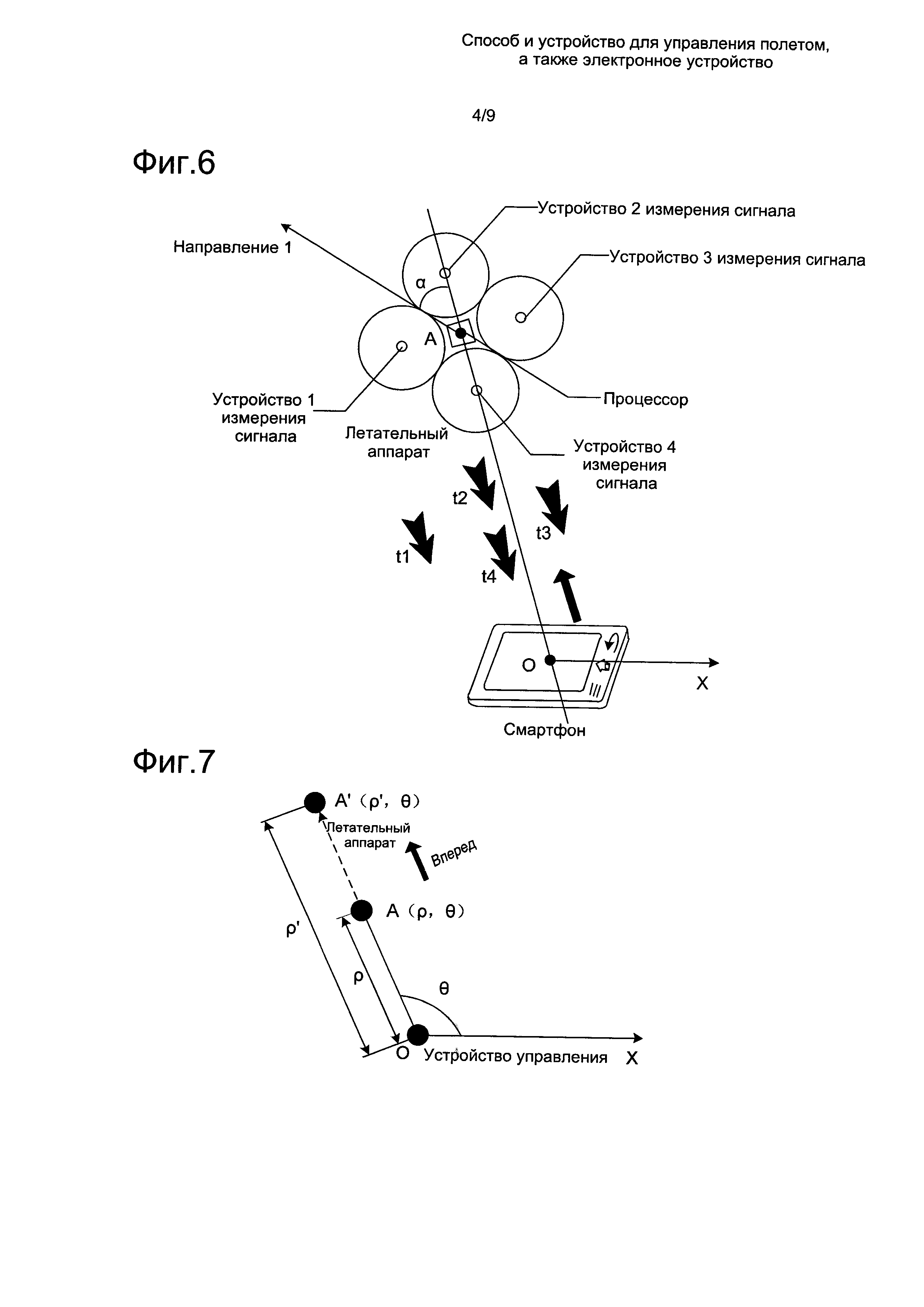
[00122] В качестве другого примера осуществления, сигналы обнаружения посылаются устройству приемопередачи сигналов в устройстве управления одновременно с помощью множества устройств передачи сигналов, установленных в различных местоположениях на летательном аппарате; сигнал обнаружения, первым принятый устройством приемопередачи сигналов, и сигнал обнаружения, последним принятый устройством приемопередачи сигналов, определяют в соответствии с принятым ответным сообщением, возвращенным устройством приемопередачи сигналов, при этом проекции устройств передачи сигналов, соответствующие сигналам обнаружения, и устройства управления на вертикальное направление расположены на одной прямой линии, причем устройство передачи сигнала, соответствующее первому принятому сигналу обнаружения, и устройство управления являются соседними узловыми точками на этой прямой линии. Соотношение взаимного положения определяют в соответствии с положениями установки устройств передачи сигналов на летательном аппарате.
[00123] Как показано на фиг. 6, устройство 1 передачи сигнала, устройство 2 передачи сигнала, устройство 3 передачи сигнала, устройство 4 передачи сигнала и тому подобное устанавливают в различных позициях на летательном аппарате, устройство приемопередачи сигналов имеется в устройстве управления (а именно, смартфоне), и устройство приемопередачи сигналов может принимать сигнал обнаружения, посланный каждым устройством передачи сигнала на летательном аппарате.
[00124] Поскольку положения установки всех устройств передачи сигналов разные, относительные расстояния между соответствующими устройствами передачи сигналов и смартфоном различны, поэтому, когда все устройства передачи сигналов передают сигналы обнаружения одновременно, устройство приемопередачи сигналов в смартфоне будет приминать эти сигналы обнаружения в разные моменты времени. Идентификатор каждого устройства обнаружения сигнала может содержаться в соответствующем переданном сигнале обнаружения, и таким образом смартфон может различать и записывать последовательность приема соответствующего сигнала обнаружения от каждого устройства передачи сигнала.
[00125] Например, как показано на фиг. 6, предположим, что устройство 1 передачи сигнала, устройство 2 передачи сигнала, устройство 3 передачи сигнала и устройство 4 передачи сигнала соответствуют времени t1 приема, времени t2 приема, времени t3 приема и времени t4 приема, где t4 является минимумом и t2 является максимумом, и считаем, что проекции устройства управления (а именно, устройства дистанционного управления, такого как смартфон на фиг. 6), устройства 4 передачи сигнала и устройства 2 передачи сигнала на вертикальное направление расположены на одной прямой линии. Затем способ определения соотношения взаимного положения аналогичен варианту осуществления, показанному на фиг. 5, и не будет разрабатываться в настоящем документе.
[00126] Реализация 3
[00127] В еще одном примере осуществления, устройства позиционирования (например, чипы глобальной системы позиционирования (GPS) и чипы системы позиционирования Бейдоу) могут быть установлены на летательном аппарате и устройстве дистанционного управления для устройства управления, соответственно, таким образом, что они сконфигурированы для получения информации позиционирования (например, информации о долготе и широте), касающейся летательного аппарата и устройства дистанционного управления, соответственно. Таким образом, соотношение взаимного положения между ними может быть вычислено путем совместного использования информации позиционирования между летательным аппаратом и устройством дистанционного управления.
[00128] На шаге 408, летательный аппарат преобразует целевое направление в команде управления направлением полета в соответствии с соотношением взаимного положения между летательным аппаратом и устройством управления.
[00129] На шаге 410, выполняют команду для управления летательным аппаратом для полета к целевому направлению.
[00130] В настоящем варианте осуществления в случае перехода к шагу 406 летательный аппарат непосредственно выполняет принятую команду управления направлением полета, а в случае перехода к шагу 408 летательный аппарат должен преобразовать целевое направление в принятой команде управления направлением полета и осуществляет управление полетом в соответствии с преобразованным целевым направлением.
[00131] Когда команду управления направлением полета генерируют на основе полярной системы координат, летательный аппарат может управляться посредством режимов управления полетом, соответствующим различным целевым направлениям.
[00132] 1. Полет вперед и назад
[00133] Когда команда управления направлением полета относится к полету вперед или полету назад, летательным аппаратом управляют для полета вдоль линии, соединяющей летательный аппарат и устройство управления, таким образом, что значение расстояния в координатной информации изменяется, а значение угла в координатной информации не изменяется.
[00134] Как показано на фиг. 7, предполагается, что устройство управления находится в точке О, и устанавливается полярная система координат ОХ с точкой О в качестве начала координат. Летательный аппарат находится в точке А, а координатной информацией является (ρ, θ), это указывает, что длина отрезка OA составляет ρ и внутренний угол между ОХ и OA равен 6.
[00135] Когда команда управления направлением полета, посланная устройством управления, относится к полету вперед, летательный аппарат будет лететь в направлении продолжения луча OA посредством регулировки и распределения мощности для каждого приводного элемента (например, приводных двигателей по четырем осям четырехосного летательного аппарата). Предполагается, что летательный аппарат летит в точку А' и его координатная информация изменяется на (ρ', θ).
[00136] В описанном выше способе устройству управления нет необходимости фокусироваться на положении летательного аппарата в реальном времени в точке А, например, ориентацией летательного аппарата может и не быть направление OA, но летательный аппарат может сам регулировать свое положение и направление полета в реальном времени на основе соотношения взаимного положения между самим летательным аппаратом и устройством управления и координатной информацией относительно точки А, тем самым плавно перелетая в точку А'. Аналогичным образом, когда команда управления направлением полета относится к полету назад, летательный аппарат сделает ρ уменьшенным, а θ неизменяемым, т.е. летательный аппарат будет лететь по направлению луча АО.
[00137] 2. Полет влево и вправо
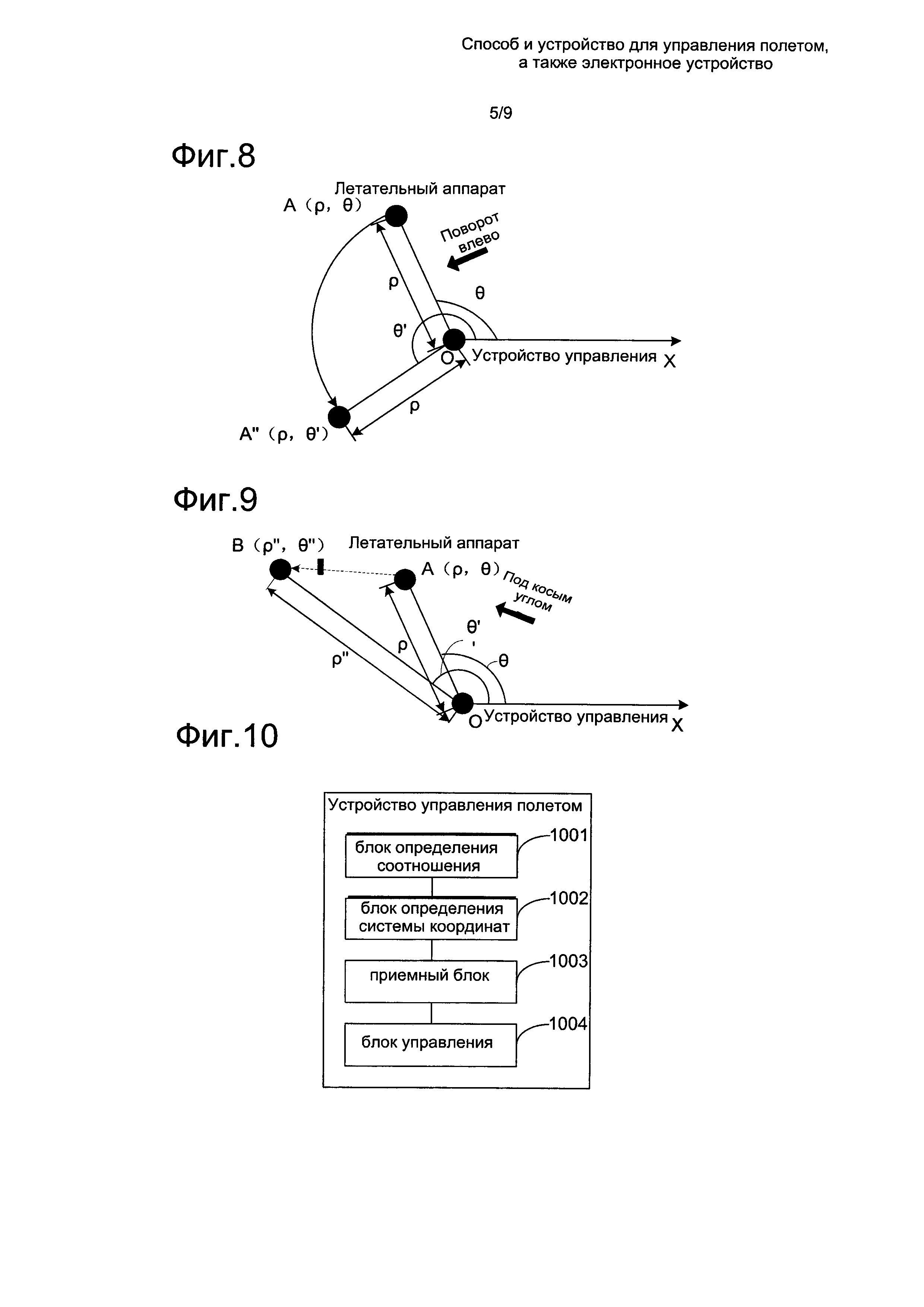
[00138] Когда команда управления направлением полета относится к левому повороту или правому повороту, летательным аппаратом управляют для полета в направлении, перпендикулярном линии, соединяющей летательный аппарат и устройство управления, таким образом, что значение угла в координатной информации изменяется, а значение расстояния в координатной информации не изменяется.
[00139] Как показано на фиг. 8, предполагается, что устройство управления находится в точке О, и устанавливается полярная система координат ОХ с точкой О в качестве начала координат. Летательный аппарат находится в точке А и координатной информацией является (ρ, θ), что указывает, что длина отрезка OA составляет р и внутренний угол между ОХ и OA равен θ.
[00140] Когда команда управления направлением полета, посланная устройством управления, относится к левому повороту, летательный аппарат будет всегда лететь в направлении, перпендикулярном линии, соединяющей сам летательный аппарат и точку О, посредством регулировки и распределения мощности для каждого приводного элемента (например, приводных двигателей по четырем осям четырехосного летательного аппарата). Другими словами, летательный аппарат летит по дуге окружности с точкой О, служащей центром круга, a OA является радиусом, и ориентацией летательного аппарата в процессе полета является касательная к дуге окружности. Например, летательный аппарат летит из точки А в точку А'', и координатная информация изменяется на (ρ, θ').
[00141] В описанном выше способе маршрут полета и процесс управления летательным аппаратом полностью использует точку О, в которой находится устройство управления, в качестве центра, тем самым упрощая управление полетом со стороны устройства управления. Аналогичным образом, когда команда управления направлением полета относится к правому повороту, летательный аппарат будет делать ρ неизменным, а θ уменьшенным, т.е. летательный аппарат будет лететь вдоль правого касательного направления OA.
[00142] 3. Полет под косым углом
[00143] Когда команда управления направлением полета относится к полету под косым углом, извлекают прямой компонент и вращательный компонент, содержащиеся в команде управления направлением полета, при этом прямой компонент соответствует полету вперед или полету назад летательного аппарата, а вращательный компонент соответствует повороту влево или повороту вправо полета. Летательным аппаратом управляют в соответствии с прямым компонентом и вращательным компонентом таким образом, что значение расстояния в координатной информации изменяется в соответствии с прямым компонентом, а значение угла в координатной информации изменяется в соответствии с вращательным компонентом.
[00144] Как показано на фиг. 9, предполагается, что устройство управления находится в точке О, и устанавливается полярная система координат ОХ с точкой О в качестве начала координат. Летательный аппарат находится в точке А и координатной информацией является (ρ, θ), что указывает, что длина участка OA составляет ρ и внутренний угол между ОХ и OA равен 0.
[00145] Направление под косым углом является направлением, которое не является чистым направлением вперед-назад или направлением влево-вправо, но содержит компоненты как направления вперед-назад, так и направления влево-вправо. Таким образом, когда команда управления направлением полета, посланная устройством управления, относится к полету под косым углом, летательным аппаратом управляют для полета путем разложения направления под косым углом на направление вперед-назад (а именно, прямой компонент) и направление влево-вправо (а именно, вращательный компонент). Например, летательный аппарат находится в точке А (ρ, θ), и на основе целевого направления команды управления направлением полета прямой компонент, полученный при разложении, должен использоваться, чтобы регулировать ρ, вращательный компонент, полученный при разложении, должен использоваться, чтобы регулировать θ, и получают отрегулированные ρ'' и θ'', соответственно, т.е. точка В (ρ'', θ'') берется в качестве цели полета.
[00146] В соответствии с вышеуказанными вариантами осуществления для способа управления полетом варианты осуществления настоящего изобретения также предлагают устройство для управления полетом.
[00147] На фиг. 10 показана структурная схема устройства для управления полетом в соответствии с примером осуществления. Как показано на фиг. 10, устройство содержит блок 1001 определения соотношения, блок 1002 определения системы координат, приемный блок 1003 и блок 1004 управления, где:
[00148] блок 1001 определения соотношения выполнен с возможностью определять соотношение взаимного положения между летательным аппаратом и устройством управления;
[00149] блок 1002 определения системы координат выполнен с возможностью определять полярную систему координат с устройством управления в начале координат в соответствии с соотношением взаимного положения;
[00150] приемный блок 1003 выполнен с возможностью принимать команду управления направлением полета, посланную устройством управления, при этом команду управления направлением полета генерируют на основе полярной системы координат; и
[00151] блок 1004 управления выполнен с возможностью управлять, в соответствии с координатной информацией о летательном аппарате в полярной системе координат, летательным аппаратом для полета в соответствии с командой управления направлением полета.
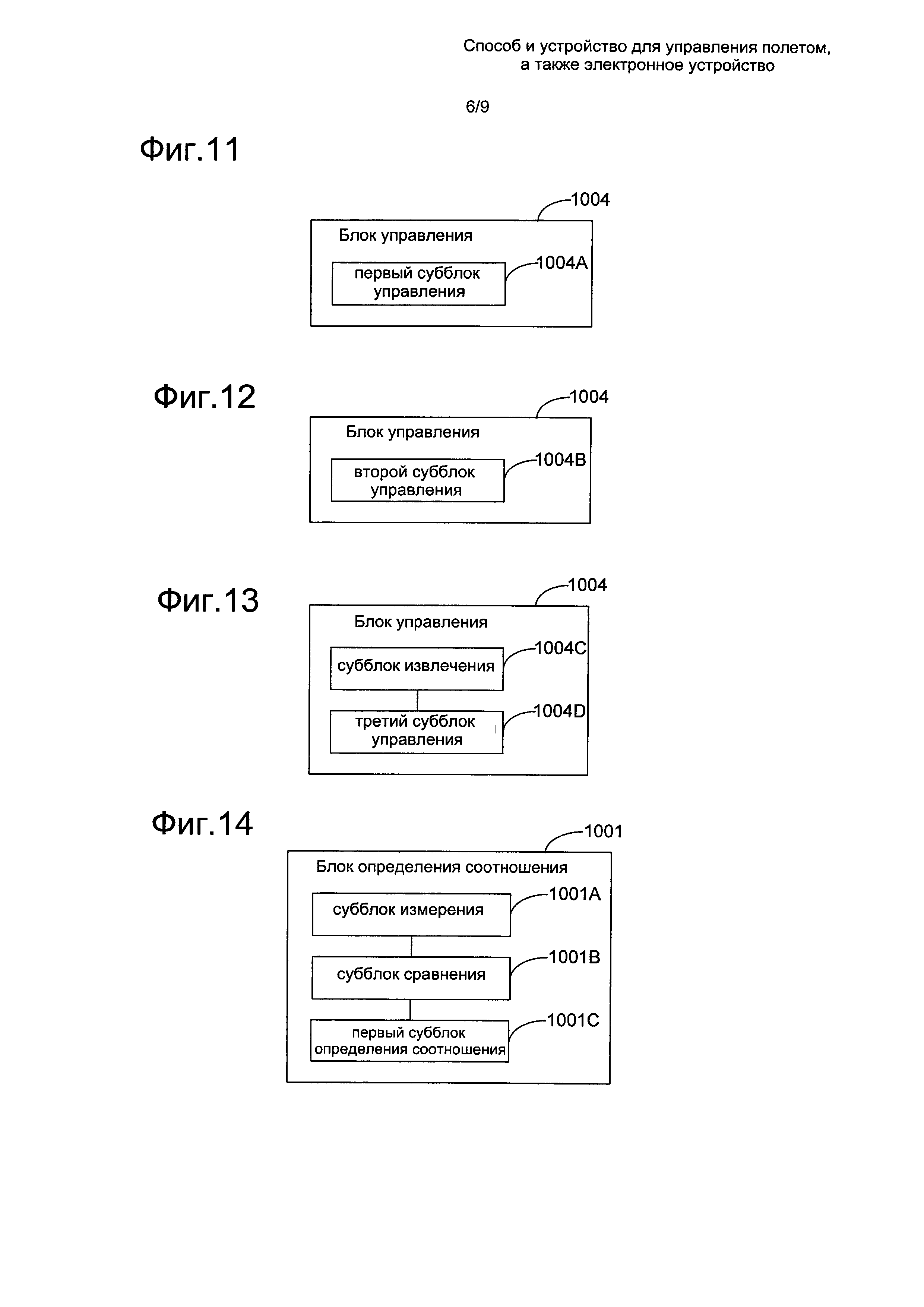
[00152] Как показано на фиг. 11, которая представляет другую структурную схему устройства для управления полетом в соответствии с примером осуществления, на основе вышеупомянутого варианта осуществления на фиг. 10, блок 1004 управления в соответствии с этим вариантом осуществления может содержать: первый субблок 1004А управления.
[00153] Первый субблок 1004А управления выполнен с возможностью, когда команда управления направлением полета относится к полету вперед или полету назад, управлять летательным аппаратом для полета вдоль линии, соединяющей летательный аппарат и устройство управления, таким образом, что значение расстояния в координатной информации изменяется, а значение угла в координатной информации не изменяется.
[00154] Как показано на фиг. 12, которая представляет еще одну структурную схему устройства для управления полетом в соответствии с примером осуществления, на основе вышеупомянутого варианта осуществления на фиг. 10, блок 1004 управления в соответствии с этим вариантом осуществления может содержать: второй субблок 1004В управления.
[00155] Второй субблок 1004 В управления выполнен с возможностью, когда команда управления направлением полета относится к повороту влево или повороту вправо, управлять летательным аппаратом для полета по направлению, перпендикулярному линии, соединяющей летательный аппарат и устройство управления, таким образом, что значение угла в координатной информации изменяется, а значение расстояния в координатной информации не изменяется.
[00156] Как показано на фиг. 13, которая является еще одной структурной схемой устройства для управления полетом в соответствии с примером осуществления, на основе вышеупомянутого варианта осуществления, показанного на фиг. 10, блок 1004 управления в соответствии с этим вариантом осуществления может содержать: субблок 1004С извлечения и третий субблок 1004D управления, где:
[00157] субблок 1004С извлечения выполнен с возможностью, когда команда управления направлением полета относится к полету под косым углом, извлекать прямой компонент и вращательный компонент, содержащиеся в команде управления направлением полета, при этом прямой компонент соответствует полету вперед или полету назад, а вращательный компонент соответствует левому повороту или правому повороту; и
[00158] третий субблок 1004D управления выполнен с возможностью управлять летательным аппаратом в соответствии с прямым компонентом и вращательным компонентом таким образом, что значение расстояния в координатной информации изменяется в соответствии с прямым компонентом, а значение угла в координатной информации изменяется в соответствии с вращательным компонентом.
[00159] Как показано на фиг. 14, которая является еще одной структурной схемой устройства для управления полетом в соответствии с примером осуществления, на основе вышеупомянутого варианта осуществления, показанного на фиг. 10, блок 1001 определения соотношения в соответствии с этим вариантом осуществления может содержать: субблок 1001А измерения, субблок 1001 В сравнения и первый субблок 1001С определения соотношения, где:
[00160] субблок 1001А измерения выполнен с возможностью измерять измерительный сигнал, передаваемый устройством приемопередачи сигналов в устройстве управления, соответственно посредством множества устройств измерения сигналов, установленных в различных местоположениях на летательном аппарате;
[00161] субблок 1001 В сравнения выполнен с возможностью сравнивать интенсивности сигналов, соответственно измеренных устройствами измерения сигналов, при этом проекции устройства измерения сигнала, соответствующего самой высокой интенсивности сигнала, устройства измерения сигнала, соответствующего самой низкой интенсивности сигнала, и устройства управления на вертикальное направление расположены на одной прямой линии, а устройство измерения сигнала, соответствующее самой высокой интенсивности сигнала, и устройство управления являются соседними узловыми точками на этой прямой линии; и
[00162] первый субблок 1001С определения соотношения выполнен с возможностью определять соотношение взаимного положения в соответствии с положениями установки устройств измерения сигналов на летательном аппарате.
[00163] Важно отметить, что схемы расположения субблока 1001А измерения, субблока 1001В сравнения и первого субблока 1001С определения соотношения в вышеупомянутом варианте осуществления устройства, показанном на фиг. 14, могут также содержаться в вышеуказанных вариантах осуществления устройства, показанных на фиг. 11-13, и нет никаких специальных ограничений в данном варианте осуществления изобретения.
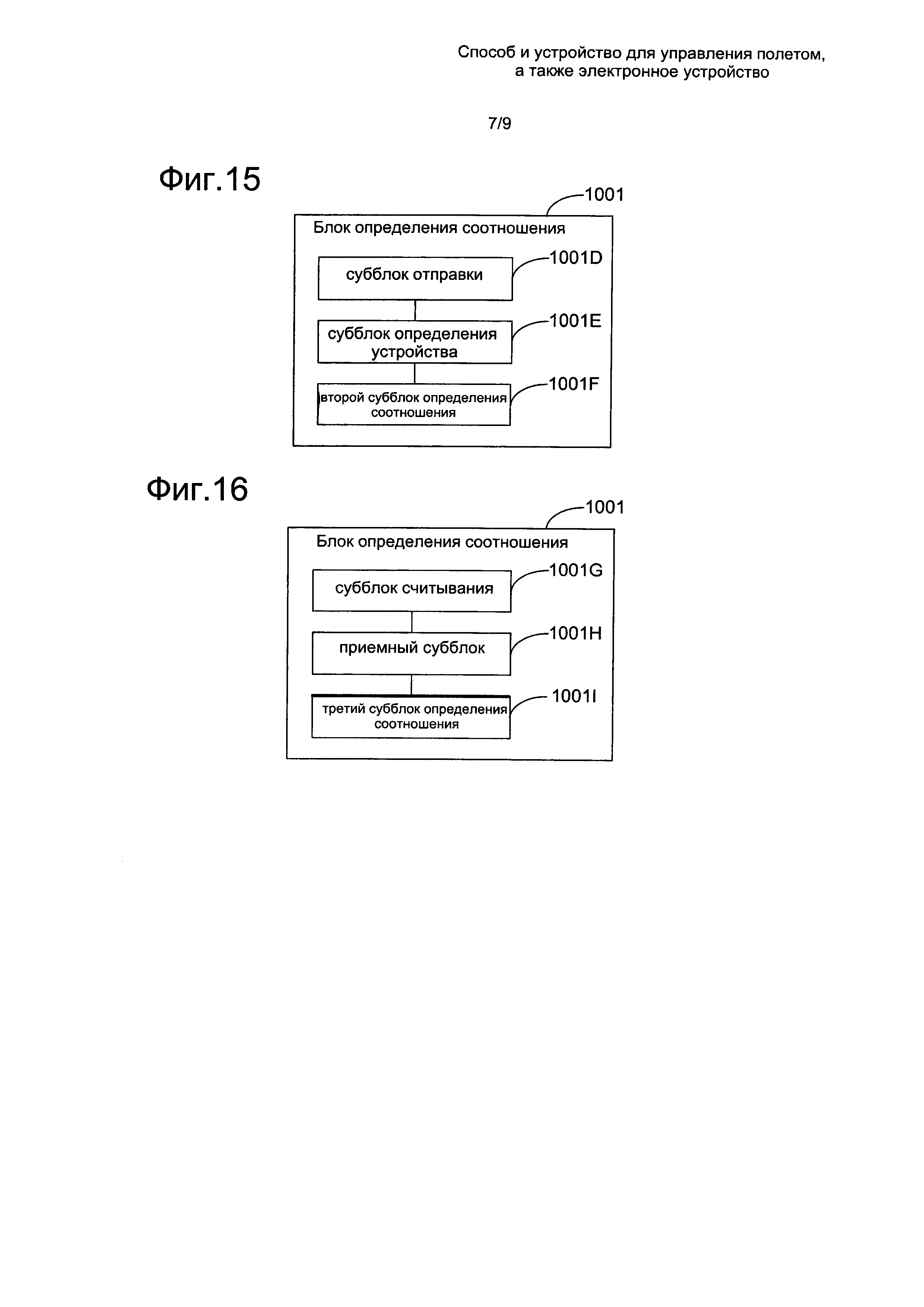
[00164] Как показано на фиг. 15, которая является еще одной структурной схемой устройства для управления полетом в соответствии с примером осуществления, на основе вышеупомянутого варианта осуществления, показанного на фиг. 10, блок 1001 определения соотношения в соответствии с этим вариантом осуществления может содержать: субблок 1001D отправки, субблок 1001Е определения устройства и второй субблок 1001F определения соотношения, где:
[00165] субблок 1001D отправки выполнен с возможностью отправлять сигналы обнаружения к устройству приемопередачи сигналов одновременно посредством множества устройств передачи сигналов, установленных в различных положениях на летательном аппарате;
[00166] субблок 1001Е определения устройства выполнен с возможностью определять сигнал обнаружения, первым принятый устройством приемопередачи сигналов, и сигнал обнаружения, последним принятый устройством приемопередачи сигналов, в соответствии с принятым ответным сообщением, возвращенным устройством приемопередачи сигналов, при этом проекции устройств передачи сигналов, соответствующих сигналам обнаружения, и устройства управления на вертикальное направление расположены на одной прямой линии, а устройство передачи сигнала, соответствующее первому принятому сигналу обнаружения, и устройство управления являются соседними узловыми точками на этой прямой линии; и
[00167] второй субблок 1001F определения соотношения выполнен с возможностью определять соотношение взаимного положения в соответствии с местоположениями установки устройств передачи сигналов на летательном аппарате.
[00168] Важно отметить, что схемы расположения субблока 1001D измерения, субблока 1001Е определения устройства и второго субблока 1001F определения соотношения в вышеуказанном варианте осуществления устройства, показанном на фиг. 15, могут также содержаться в вышеуказанных вариантах осуществления устройства, показанных на фиг. 11-13, и нет никаких специальных ограничений в данном варианте осуществления изобретения.
[00169] Как показано на фиг. 16, которая является еще одной структурной схемой устройства для управления полетом в соответствии с примером осуществления, на основе вышеупомянутого варианта осуществления, показанного на фиг. 10, блок 1001 определения соотношения в соответствии с этим вариантом осуществления может содержать: субблок1001С считывания, приемный субблок 1001Н и третий субблок 10011 определения соотношения, где:
[00170] субблок 1001G считывания выполнен с возможностью считывать первую информацию позиционирования о летательном аппарате с помощью первого устройства позиционирования, установленного на летательном аппарате;
[00171] приемный субблок 1001Н выполнен с возможностью принимать вторую информацию позиционирования, посланную устройством приемопередачи сигналов в устройстве управления, при этом вторую информацию позиционирования генерируют с помощью второго устройства позиционирования в устройстве управления; и
[00172] третий субблок 10011 определения соотношения выполнен с возможностью определять соотношения взаимного положения в соответствии с первой информацией позиционирования и второй информацией позиционирования.
[00173] Важно отметить, что схемы расположения субблока 1001G считывания, приемного субблока 1001Н и третьего субблока 1001I определения соотношения в вышеуказанном варианте осуществления устройства, показанном на фиг. 16, могут также содержаться в вышеуказанных вариантах осуществления устройства, показанных на фиг. 11-13, и нет никаких специальных ограничений в данном варианте осуществления изобретения.
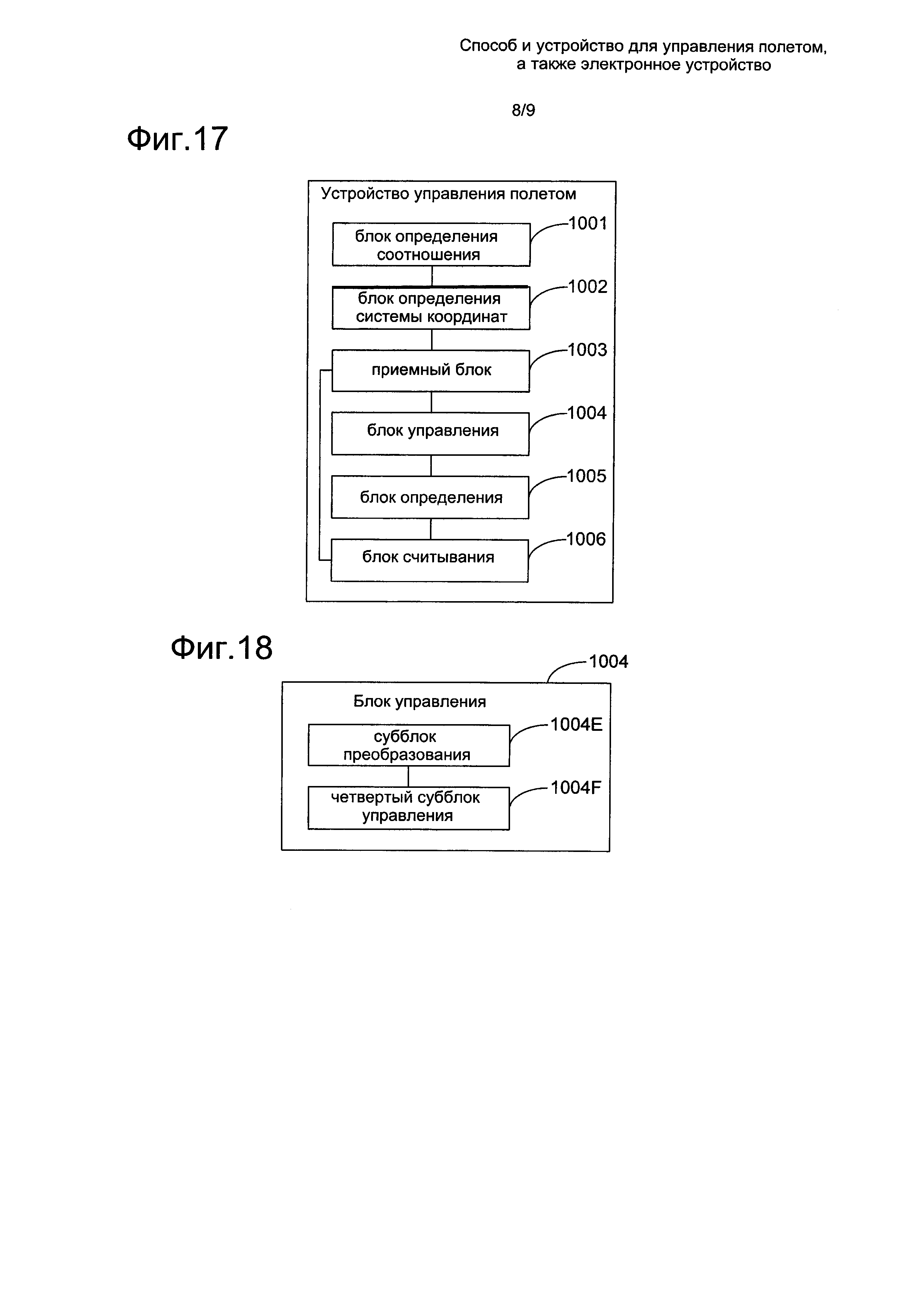
[00174] Как показано на фиг. 17, которая является еще одной структурной схемой устройства для управления полетом в соответствии с примером осуществления, на основе вышеуказанного варианта осуществления, показанного на фиг. 10, устройство в соответствии с этим вариантом осуществления может дополнительно содержать: блок 1006 считывания и блок 1005 определения, где:
[00175] блок 1006 считывания выполнен с возможностью считывать идентификатор типа, содержащийся в команде управления направлением полета; и
[00176] блок 1005 определения выполнен с возможностью определять тип команды управления направлением полета в соответствии с идентификатором типа, при этом, когда идентификатор типа имеет первое значение, это указывает, что команда управления направлением полета генерируется на основе полярной системы координат; и когда идентификатор типа имеет второе значение, это указывает, что команда управления направлением полета генерируется на основе полетной системы координат летательного аппарата, таким образом, блок 1004 управления непосредственно выполняет команду управления направлением полета таким образом, чтобы управлять летательным аппаратом.
[00177] Важно отметить, что схемы расположения блока 1006 считывания и блока 1005 определения в вышеупомянутом варианте осуществления устройства, показанном на фиг. 17, могут также содержаться в вышеуказанных вариантах осуществления устройств, показанных на фиг. 11-16, и нет никаких специальных ограничений в данном варианте осуществления изобретения.
[00178] Как показано на фиг. 18, которая является еще одной структурной схемой устройства для управления полетом в соответствии с примером осуществления, на основе вышеуказанного варианта осуществления, показанного на фиг. 10, блок 1004 управления в соответствии с этим вариантом осуществления может содержать: субблок 1004Е преобразования и четвертый субблок 1004F управления, где:
[00179] субблок 1004Е преобразования выполнен с возможностью преобразовывать целевое направление, соответствующее команде управления направлением полета, из полярной системы координат в полетную систему координат летательного аппарата; и
[00180] четвертый субблок 1004F управления выполнен с возможностью управлять летательным аппаратом в соответствии с преобразованным целевым направлением.
[00181] Важно отметить, что схемы расположения субблока 1004Е преобразования и четвертого субблока 1004F управления в вышеуказанной варианте осуществления устройства, показанного на фиг. 18, могут также содержаться с вышеуказанных вариантах осуществления устройства, показанных на фиг. 11-17, и нет никаких специальных ограничений в данном варианте осуществления изобретения.
[00182] В отношении устройств в описанных выше вариантах осуществления, конкретные способы выполнения операций для отдельных их модулей были описаны подробно в вариантах осуществления, касающихся способа, и не будут повторно разрабатываться в настоящем документе.
[00183] В связи с тем, что варианты осуществления устройства по существу соответствуют вариантам осуществления способа, для более подробного описания следует обратиться к описанию вариантов осуществления способа. Варианты осуществления устройства, описанные выше, являются лишь схематичными. Блоки, показанные в виде отдельных компонентов, могут быть или могут не быть физически разделены. Компоненты устройства отображения могут быть или могут не быть физическими устройствами. То есть, компоненты могут быть расположены в каком-либо месте или могут быть распределены на множестве сетевых узлов. Цели решений в вариантах осуществления настоящего изобретения могут быть достигнуты путем выбора некоторых или всех модулей в соответствии с фактическими потребностями. Специалисты в данной области техники могут понять и реализовать эти решения без творческой деятельности.
[00184] Соответственно, варианты осуществления настоящего изобретения также предлагают устройство для управления полетом, которое содержит: процессор и память, выполненную с возможностью хранить команды, исполняемые процессором, в котором процессор выполнен с возможностью: определять соотношение взаимных положения между летательным аппаратом и устройством управления; определять полярную систему координат с устройством управления в начале координат в соответствии с соотношением взаимного положения; принимать команду управления направлением полета, причем эту команду управления направлением полета генерируют на основе полярной системы координат; и управлять, в соответствии с координатной информацией о летательном аппарате в полярной системе координат, летательным аппаратом для полета в соответствии с командой управления направлением полета.
[00185] Соответственно, варианты осуществления настоящего изобретения также предлагают терминал, который содержит память и одну или более программ, где одна или более программ хранятся в памяти и исполняются одним или более процессорами, при этом одна или более программ содержат команды, предназначенные для выполнения следующих операций: определение соотношения взаимного положения между летательным аппаратом и устройством управления; определение полярной системы координат с устройством управления в начале координат в соответствии с соотношением взаимного положения; прием команды управления направлением полета, посланной устройством управления, при этом команду управления направлением полета генерируют на основе полярной системы координат; и управление, в соответствии с координатной информацией о летательном аппарате в полярной системе координат, летательным аппаратом для полета в соответствии с командой управления направлением полета.
[00186] На фиг. 19 представлена структурная схема устройства 1900 для управления полетом в соответствии с примером осуществления. Например, устройством 1900 может быть мобильный телефон, компьютер, цифровой широковещательный терминал, устройство передачи сообщений, игровая консоль, планшетное устройство, медицинское устройство, тренажеры, персональный цифровой помощник и т.п.
[00187] Как показано на фиг. 19, устройство 1900 может содержать один или более из следующих компонентов: компонент 1902 обработки, память 1904, компонент 1906 питания, мультимедийный компонент 1908, аудиокомпонент 1910, интерфейс 1912 ввода/вывода (input/output (I/O)), измерительный компонент 1914 и компонент 1916 связи.
[00188] Компонент 1902 обработки, как правило, управляет всеми операциями устройства 1900, например операциями, связанными с отображением, телефонными звонками, передачей данных, операциями с камерой и операциями записи. Компонент 1902 обработки может содержать один или более процессоров 1920 для исполнения команд с целью выполнения всех или части шагов вышеуказанных способов. Кроме того, компонент 1902 обработки может содержать один или более модулей, которые облегчают взаимодействие между компонентом 1902 обработки и другими компонентами. Например, компонент 1902 обработки может содержать мультимедийный модуль для облегчения взаимодействия между мультимедийным компонентом 1908 и компонентом 1902 обработки.
[00189] Память 1904 выполнена с возможностью запоминать различные виды данных для поддержки работы устройства 1900. Примеры таких данных включают в себя команды для любого приложения или способа, реализуемых в устройстве 1900, контактные данные, данные телефонной книги, сообщения, изображения, видео и т.д. Память 1904 может быть выполнена с использованием любого вида энергозависимых или энергонезависимых запоминающих устройств или их комбинации, таких как статическое оперативное запоминающее устройство (static random access memory) (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (electrically erasable programmable read-only memory) (EEPROM), стираемое программируемое постоянное запоминающее устройство (erasable programmable read-only memory) (EPROM), программируемое постоянное запоминающее устройство (programmable read-only memory) (PROM), постоянное запоминающее устройство (read-only memory) (ROM), магнитная память, флэш-память, магнитный или оптический диск.
[00190] Компонент 1906 питания обеспечивает питанием различные компоненты устройства 1900. Компонент 1906 питания может включать в себя систему управления питанием, один или более источников питания и любые другие компоненты, связанные с производством, управлением и распределением энергии в устройстве 1900.
[00191] Мультимедийный компонент 1908 включает в себя экран, создающий выходной интерфейс между устройством 1900 и пользователем. В некоторых вариантах осуществления экран может включать в себя жидкокристаллический дисплей (liquid crystal display) (LCD) и сенсорную панель (touch panel) (TP). Если экран включает в себя сенсорную панель, то этот экран может быть реализован в виде сенсорного экрана для приема входных сигналов от пользователя. Сенсорная панель содержит один или более датчиков касания для восприятия касаний, скольжений и жестов на сенсорной панели. Датчики касания могут не только воспринимать границу действия касания или скольжения, но и измерять период времени и давление, связанные с действием касания или скольжения. В некоторых вариантах осуществления мультимедийный компонент 1908 содержит переднюю и/или заднюю камеру. Передняя камера и задняя камера могут принимать внешние мультимедийные данные, в то время как устройство 1900 находится в рабочем режиме, например режиме фотографирования или видеорежиме. Каждая из передней камеры и задней камеры может быть системой с фиксированными оптическими линзами или иметь способность к фокусировке и оптическому увеличению.
[00192] Аудиокомпонент 1910 выполнен с возможностью выводить и/или вводить аудиосигналы. Например, аудиокомпонент 1910 включает в себя микрофон ("MIC"), выполненный с возможностью принимать внешний аудиосигнал, когда устройство 1900 находится в режиме работы, например режиме вызова, режиме записи и режиме распознавания голоса. Полученный аудиосигнал может быть далее запомнен в памяти 1904 или передан посредством компонента 1916 связи. В некоторых вариантах осуществления аудиокомпонент 1910 дополнительно включает в себя динамик для вывода аудиосигналов.
[00193] Интерфейс 1912 ввода/вывода предлагает интерфейс между компонентом 1902 обработки и периферийными интерфейсными модулями, например клавиатурой, колесом прокрутки, кнопками и т.п.Кнопки могут включать в себя, но не ограничиваются этим, кнопку «домой», кнопку громкости, пусковую кнопку и кнопку блокировки.
[00194] Измерительный компонент 1914 содержит один или более датчиков, выполненных с возможностью обеспечивать оценку состояния различных аспектов устройства 1900. Например, измерительный компонент 1914 может обнаруживать открытое/закрытое состояние устройства 1900, относительное расположение компонентов, например дисплея и малой клавиатуры, устройства 1900, изменение в положении устройства 1900 или компонента устройства 1900, наличие или отсутствие контакта между пользователем и устройством 1900, ориентацию или ускорение/замедление устройства 1900, и изменение температуры устройства 1900. Измерительный компонент 1914 может представлять собой датчик близости, выполненный с возможностью обнаруживать присутствие близлежащих объектов без какого-либо физического контакта. Измерительный компонент 1914 может также представлять собой датчик света, например датчик изображения на структуре комплементарный металл-оксид-полупроводник (Complementary Metal Oxide Semiconductor) (CMOS, КМОП) или приборе с зарядовой связью (Charge Coupled Device) (CCD, ПЗС), для использования в применении, связанном с изображением. В некоторых вариантах осуществления измерительный компонент 1914 может также представлять собой акселерометрический датчик, гироскопический датчик, магнитный датчик, датчик давления или датчик температуры.
[00195] Компонент 1916 связи выполнен с возможностью содействовать связи, проводной или беспроводной, между устройством 1900 и другими устройствами. Устройство 1900 может получить доступ к беспроводной сети на основе стандарта связи, например беспроводного интернета (WiFi), сети 2-го поколения (2G) или 3-го поколения (3G), или их комбинации. В одном примере осуществления компонент 1916 связи принимает широковещательный сигнал или связанную с широковещанием информацию из внешней системы управления широковещанием через широковещательный канал. В одном примере осуществления компонент 1916 связи дополнительно содержит модуль коммуникации ближнего поля (Near Field Communication) (NFC) для облегчения коммуникации ближнего радиуса действия. Например, NFC-модуль может быть реализован на основе технологии радиочастотной идентификации (Radio Frequency Identification) (RFID), технологии Ассоциации по инфракрасной технологии передачи данных (Infrared Data Association) (IrDA), технологии сверхширокополосной передачи данных (Ultra-WideBand) (UWB), технологии Bluetooth (ВТ) и других технологий.
[00196] В примерах осуществления устройство 1900 может быть реализовано с помощью одной или более специализированных интегральных схем (Application Specific Integrated Circuit) (ASIC), цифровых сигнальных процессоров (Digital Signal Processor) (DSP), устройств цифровой обработки сигналов (Digital Signal Processing Devices) (DSPD), программируемых логических устройств (Programmable Logic Device) (PLD), программируемых вентильных матриц (Field Programmable Gate Array) (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных элементов для выполнения вышеописанных способов.
[00197] В примерах осуществления также предлагается машиночитаемый носитель данных, содержащий команды, например память 1904, содержащая команды, исполняемые процессором 1920 в устройстве 1900 для выполнения описанных выше способов. Например, машиночитаемым носителем может быть ПЗУ (ROM), ОЗУ (RAM), компакт-диск (Compact Disc Read-Only Memory) (CD-ROM), магнитная лента, гибкий диск, оптическое устройство для хранения информации и тому подобное.
[00198] Другие варианты осуществления настоящего изобретения будут очевидны для специалистов в данной области из данного описания и практического осуществления настоящего изобретения. Эта заявка предназначена для охвата любых вариантов, применений или адаптаций настоящего изобретения, следующих из общих принципов изобретения и включающих в себя такие отклонения от настоящего изобретения, которые находятся в пределах известной или обычной практики в данной области техники. Предполагается, что описание и примеры следует рассматривать только как иллюстративные, с истинными объемом и сущностью настоящего изобретения, указанными в последующей формуле изобретения.
[00199] Следует понимать, что варианты осуществления настоящего изобретения не ограничены точной конструкцией, которая была описана выше и проиллюстрирована на прилагаемых чертежах, и что различные модификации и изменения могут быть произведены в объеме настоящего изобретения. Предполагается, что объем настоящего изобретения ограничивается только прилагаемой формулой изобретения.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[00200] Устанавливая полярную систему координат с пользователем в начале координат и принимая команду управления направлением полета на основе полярной системы координат, варианты осуществления настоящего изобретения позволяют пользователю принимать себя в качестве центра процесса управления без учета позиции летательного аппарата и без управления с позиции летательного аппарата, тем самым упрощая операции управления и уменьшая трудности в управлении летательным аппаратом.
Способ и устройство для отображения информации уведомления
Способ и устройство для получения информации
Способ и устройство для блокировки файла
Способ и устройство для управления полномочиями
Способ и устройство для обработки идентификатора видеофайла
Способ, устройство и система для установления беспроводного сетевого соединения
Способ и оборудование для управления устройством
Способ и устройство для обработки уведомления о безопасности
Способ и устройство для совместного использования фотографии
Способ и устройство для обеспечения стационарного состояния балансирующего транспортного средства
Способ и аппарат для запроса данных о температуре
Носимое устройство и способ его изготовления
Способ и устройство для установки задания
Способ и аппарат для отображения данных о состоянии здоровья
Способ и устройство для регулировки мощности сигнала маршрутизатора
Способ и устройство для уборки мусора
Способ, устройство и система для установления беспроводного сетевого соединения
Способ и устройство для запуска приложения
Способ управления беспилотным летательным аппаратом и устройство для этого
Способ, оборудование и система для управления устройством

