Результат интеллектуальной деятельности: Способ и устройство для уборки мусора
Вид РИД
Изобретение
[0001] Эта заявка основана на заявке на патент КНР №2014107643948, зарегистрированной 11 декабря 2014 г., все содержание которой включено в данный документ путем ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Изобретение касается области "умной" бытовой техники и, более конкретно, касается способов уборки мусора и устройств для уборки мусора.
УРОВЕНЬ ТЕХНИКИ
[0003] Робот-уборщик - это домашний электрический прибор, который способен автоматически поддерживать чистоту пола в комнате посредством искусственного интеллекта.
[0004] Робот-уборщик обычно работает в назначенной манере уборки. А именно, пользователь назначает определенное время для работы робота-уборщика, обычно это время после того, как пользователь уходит из дома. Робот-уборщик начнет работать в назначенное время, чтобы выполнить уборку пола.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Чтобы решить проблему низкой эффективности робота-уборщика на существующем уровне техники, варианты осуществления изобретения предлагают способы уборки мусора и устройства для уборки мусора. Используются следующие технические решения.
[0006] Согласно первому аспекту вариантов осуществления изобретения, предложен способ уборки мусора. Способ включает:
[0007] получение данных контроля контролируемой области;
[0008] обнаружение, согласно данным контроля, присутствует ли мусор в контролируемой области;
[0009] если мусор присутствует в контролируемой области, получение информации о местоположении мусора в контролируемой области; и
[0010] посылку информации о местоположении мусора роботу-уборщику, конфигурированному для уборки мусора согласно информации о местоположении.
[0011] В примере осуществления, обнаружение, согласно данным контроля, присутствует ли мусор в контролируемой области, включает:
[0012] оценку, согласно по меньшей мере одному кадру изображения в данных контроля, производит ли действие пользователя мусор; или
[0013] получение области различия между двумя кадрами изображений из данных контроля путем сравнения, и обнаружение, согласно этой области различия, присутствует ли мусор в контролируемой области; или
[0014] обнаружение, изменилось ли изображение в данных контроля, и если изображение в данных контроля изменилось, определение, присутствует ли мусор в измененных изображениях.
[0015] В варианте осуществления, получение информации о местоположении мусора в контролируемой области включает:
[0016] получение границы между стеной и нижней поверхностью в контролируемой области согласно данным контроля;
[0017] моделирование нижней поверхности согласно границе между стеной и нижней поверхностью в контролируемой области; и
[0018] вычисление информации о местоположении мусора на смоделированной нижней поверхности.
[0019] В варианте осуществления, получение информации о местоположении мусора в контролируемой области включает:
[0020] установление совпадения области местоположения мусора, где мусор расположен в данных контроля, с областью, где робот-уборщик расположен по меньшей мере в одном образцовом изображении, при этом образцовое изображение является изображением, ранее записанным устройством контроля, когда робот-уборщик передвигался или стоял в контролируемой области, причем каждое образцовое изображение связано с информацией о местоположении, которую синхронно сообщил робот-уборщик; и
[0021] если совпадение успешно установлено, определение информации о местоположении, связанной с соответствующим образцовым изображением, как информации о местоположении мусора в контролируемой области.
[0022] В варианте осуществления способ также включает:
[0023] запись по меньшей мере одного изображения в качестве образцового изображения, когда робот-уборщик передвигается или стоит в контролируемой области;
[0024] прием информации о местоположении, синхронно сообщаемой роботом-уборщиком в процессе записи изображения;
[0025] идентификация области, где робот-уборщик расположен в каждом образцовом изображении; и
[0026] связывание и запоминание каждого образцового изображения, области, где робот-уборщик расположен в образцовом изображении, и информации о местоположении, которую синхронно сообщил робот-уборщик.
[0027] В варианте осуществления способ также включает:
[0028] обнаружение, находится ли мусор на нижней поверхности контролируемой области; и
[0029] выполнение шага получения информации о местоположении мусора в контролируемой области, если мусор находится на нижней поверхности контролируемой области.
[0030] Согласно второму аспекту вариантов осуществления изобретения, предложен способ уборки мусора. Способ включает:
[0031] прием информации о местоположении мусора, посланной устройством контроля; и
[0032] уборку мусора согласно информации о его местоположении.
[0033] Согласно третьему аспекту вариантов осуществления изобретения, предложено устройство для уборки мусора. Устройство включает:
[0034] модуль получения, конфигурированный для получения данных контроля контролируемой области;
[0035] модуль обнаружения, конфигурированный для обнаружения, согласно данным контроля, присутствует ли мусор в контролируемой области;
[0036] модуль локализации, конфигурированный, если мусор присутствует в контролируемой области, для получения информации о местоположении мусора в контролируемой области; и
[0037] модуль посылки информации, конфигурированный для посылки информации о местоположении мусора роботу-уборщику, конфигурированному для уборки мусора согласно информации о местоположении.
[0038] В варианте осуществления модуль обнаружения включает:
[0039] первый подмодуль обнаружения, конфигурированный, чтобы оценивать, согласно по меньшей мере одному кадру изображения в данных контроля, производит ли действие пользователя мусор; или
[0040] второй подмодуль обнаружения, конфигурированный для получения области различия между двумя кадрами изображений из данных контроля путем сравнения и для обнаружения, согласно этой области различия, присутствует ли мусор в контролируемой области; или
[0041] третий подмодуль обнаружения, конфигурированный для обнаружения, изменилось ли изображение в данных контроля; и если изображение в данных контроля изменилось, для определения, присутствует ли мусор в измененных изображениях.
[0042] В варианте осуществления модуль локализации включает:
[0043] подмодуль получения, конфигурированный для получения границы между стеной и нижней поверхностью в контролируемой области согласно данным контроля;
[0044] подмодуль моделирования, конфигурированный, чтобы моделировать нижнюю поверхность согласно границе между стеной и нижней поверхностью в контролируемой области; и
[0045] вычисляющий подмодуль, конфигурированный, чтобы вычислять информацию о местоположении мусора на смоделированной нижней поверхности.
[0046] В варианте осуществления модуль локализации включает:
[0047] подмодуль установления совпадения, конфигурированный, чтобы установить совпадение области местоположения мусора, где мусор расположен в данных контроля, с областью, где робот-уборщик расположен по меньшей мере в одном образцовом изображении, при этом образцовое изображение является изображением, ранее записанным устройством контроля, когда робот-уборщик передвигался или стоял в контролируемой области, причем каждое образцовое изображение связано с информацией о местоположении, которую синхронно сообщил робот-уборщик; и
[0048] подмодуль определения, конфигурированный, чтобы определить, если совпадение успешно установлено, информацию о местоположении, связанную с соответствующим образцовым изображением, как информацию о местоположении мусора в контролируемой области.
[0049] В варианте осуществления устройство также включает:
[0050] модуль записи, конфигурированный для записи по меньшей мере одного изображения в качестве образцового изображения, когда робот-уборщик передвигается или стоит в контролируемой области;
[0051] модуль приема, конфигурированный для приема информации о местоположении, которую синхронно сообщает робот-уборщик в процессе записи;
[0052] модуль идентификации, конфигурированный для определения области, где робот-уборщик расположен в каждом образцовом изображении; и
[0053] модуль хранения, конфигурированный для связывания и запоминания каждого образцового изображения, области, где робот-уборщик расположен в образцовом изображении, и информации о местоположении, которую синхронно сообщил робот-уборщик.
[0054] В варианте осуществления устройство также включает:
[0055] модуль обнаружения нижней поверхности, конфигурированный для обнаружения, находится ли мусор на нижней поверхности контролируемой области; и
[0056] модуль локализации, конфигурированный для выполнения шага получения информации о местоположении мусора в контролируемой области, если мусор находится на нижней поверхности в контролируемой области.
[0057] Согласно четвертому аспекту вариантов осуществления изобретения, предложено устройство для уборки мусора. Устройство включает:
[0058] модуль приема, конфигурированный для приема информации о местоположении мусора, посланной устройством контроля; и
[0059] модуль уборки, конфигурированный для уборки мусора согласно информации о местоположении.
[0060] Согласно пятому аспекту вариантов осуществления изобретения, предложено устройство для уборки мусора. Устройство включает:
[0061] процессор; и
[0062] память для хранения команд, выполняемых процессором;
[0063] при этом процессор конфигурируется для выполнения:
[0064] получения данных контроля контролируемой области;
[0065] обнаружения, согласно данным контроля, присутствует ли мусор в контролируемой области;
[0066] если мусор присутствует в контролируемой области, получения информации о местоположении мусора в контролируемой области; и
[0067] посылки информации о местоположении мусора роботу-уборщику, конфигурированному для уборки мусора согласно информации о местоположении.
[0068] Согласно шестому аспекту вариантов осуществления изобретения, предложено устройство для уборки мусора. Устройство включает:
[0069] процессор; и
[0070] память для хранения команд, выполняемых процессором;
[0071] при этом процессор конфигурируется для выполнения:
[0072] приема информации о местоположении мусора, посланной устройством контроля; и
[0073] уборки мусора согласно информации о местоположении.
[0074] Технические решения, предложенные в вариантах осуществления изобретения, могут дать следующие положительные эффекты.
[0075] Получают данные контроля контролируемой области; обнаруживают, согласно данным контроля, присутствует ли мусор в контролируемой области; если мусор присутствует в контролируемой области, получают информацию о местоположении мусора в контролируемой области; и эту информацию о местоположении мусора посылают роботу-уборщику, который конфигурирован для уборки мусора согласно информации о местоположении. Это решает проблему низкой эффективности робота-уборщика и дает эффекты своевременной уборки мусора и точной уборки мусора согласно информации о местоположении.
[0076] Нужно понимать, что вышеприведенное общее описание и подробное описание, данное ниже, являются только иллюстративными и пояснительными, но не ограничивают изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0077] Сопровождающие чертежи, которые включены в описание и составляют его часть, поясняют варианты осуществления, совместимые с описанием, и вместе с описанием служат для того, чтобы объяснить принципы изобретения.
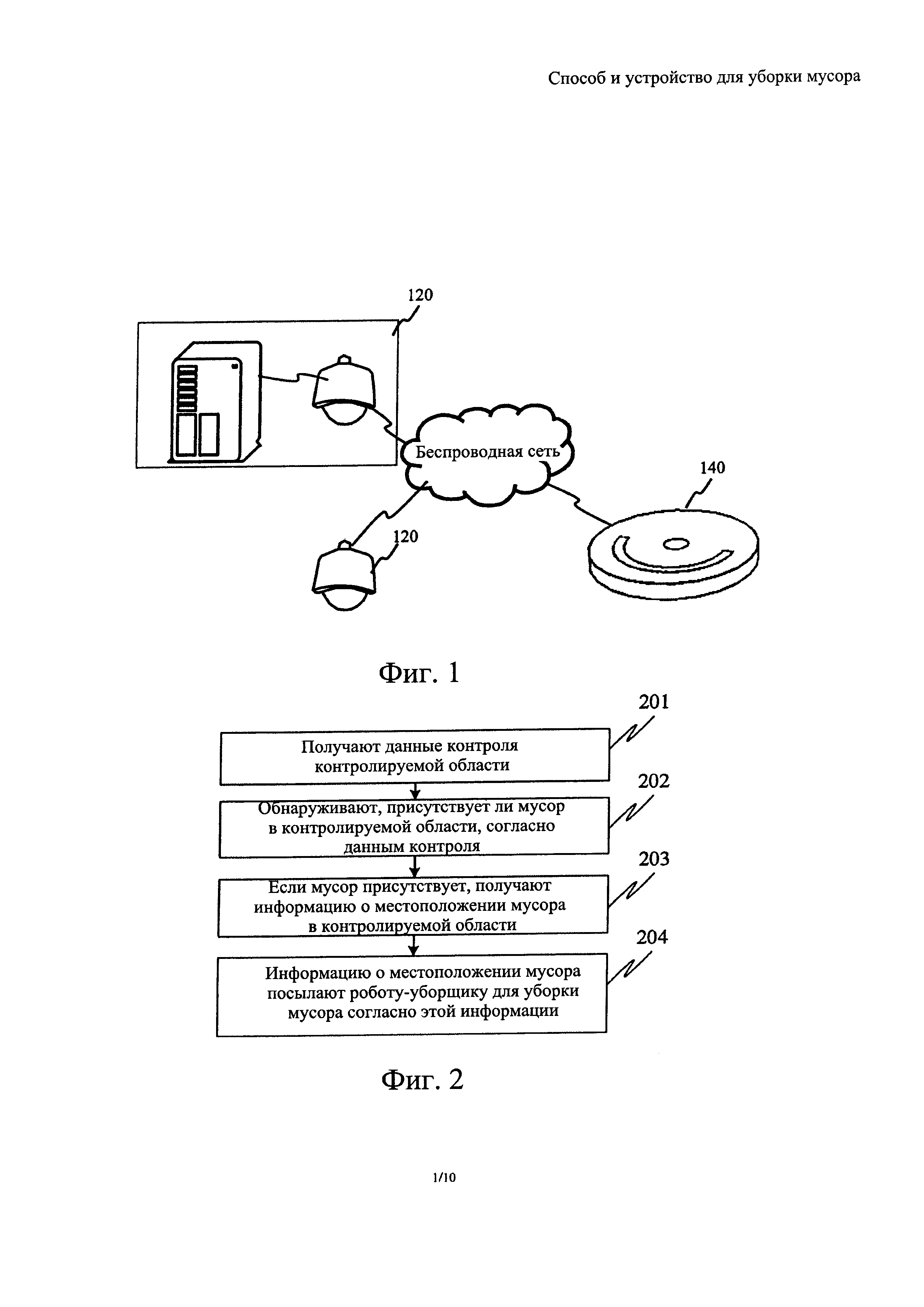
[0078] Фиг. 1 является структурной схемой, поясняющей среду осуществления способа уборки мусора согласно варианту осуществления изобретения;
[0079] Фиг. 2 является блок-схемой, поясняющей способ уборки мусора согласно примеру осуществления изобретения;
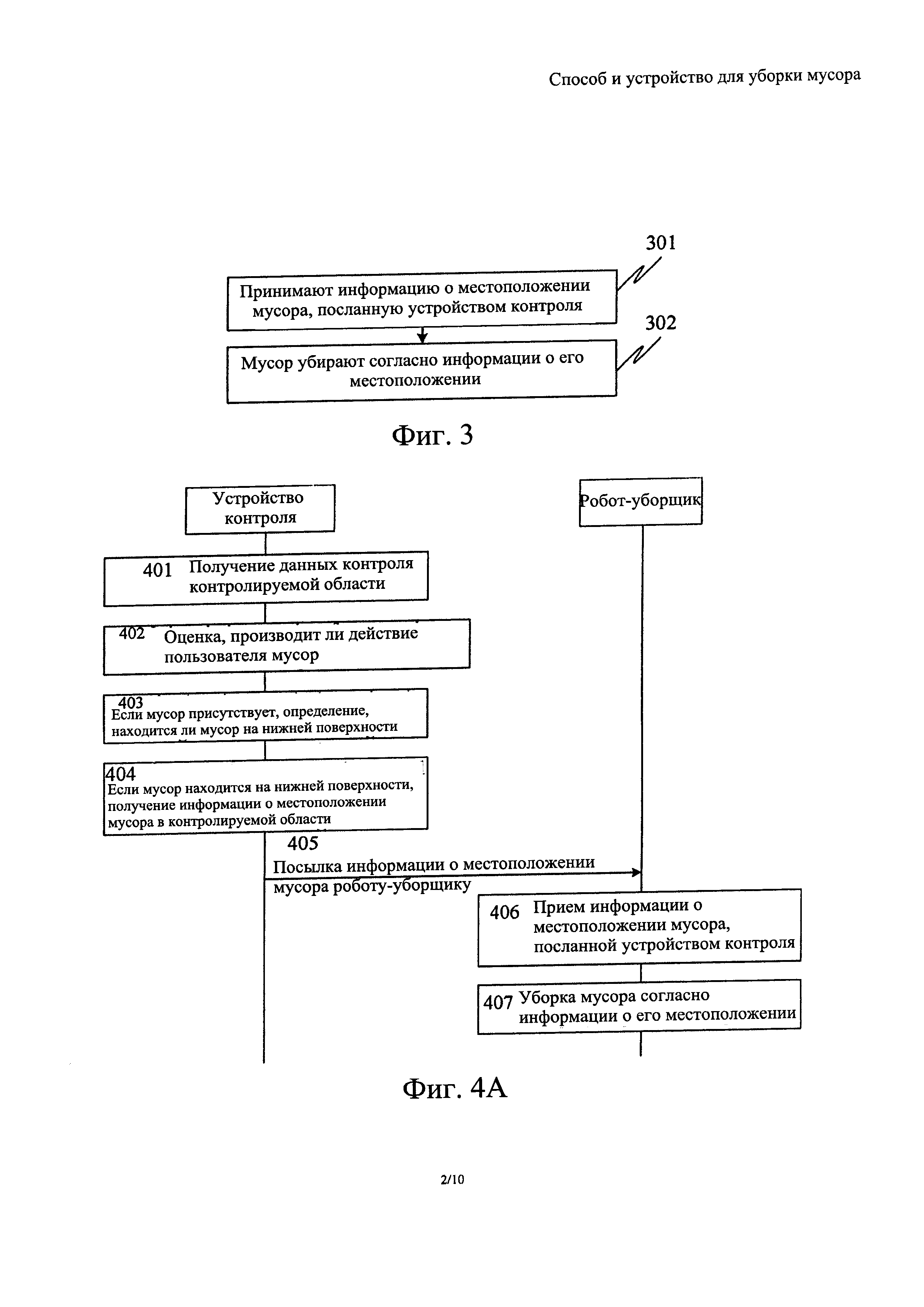
[0080] Фиг. 3 является блок-схемой, поясняющей способ уборки мусора согласно другому примеру осуществления изобретения;
[0081] Фиг. 4А является блок-схемой, поясняющей способ уборки мусора согласно другому примеру осуществления изобретения;
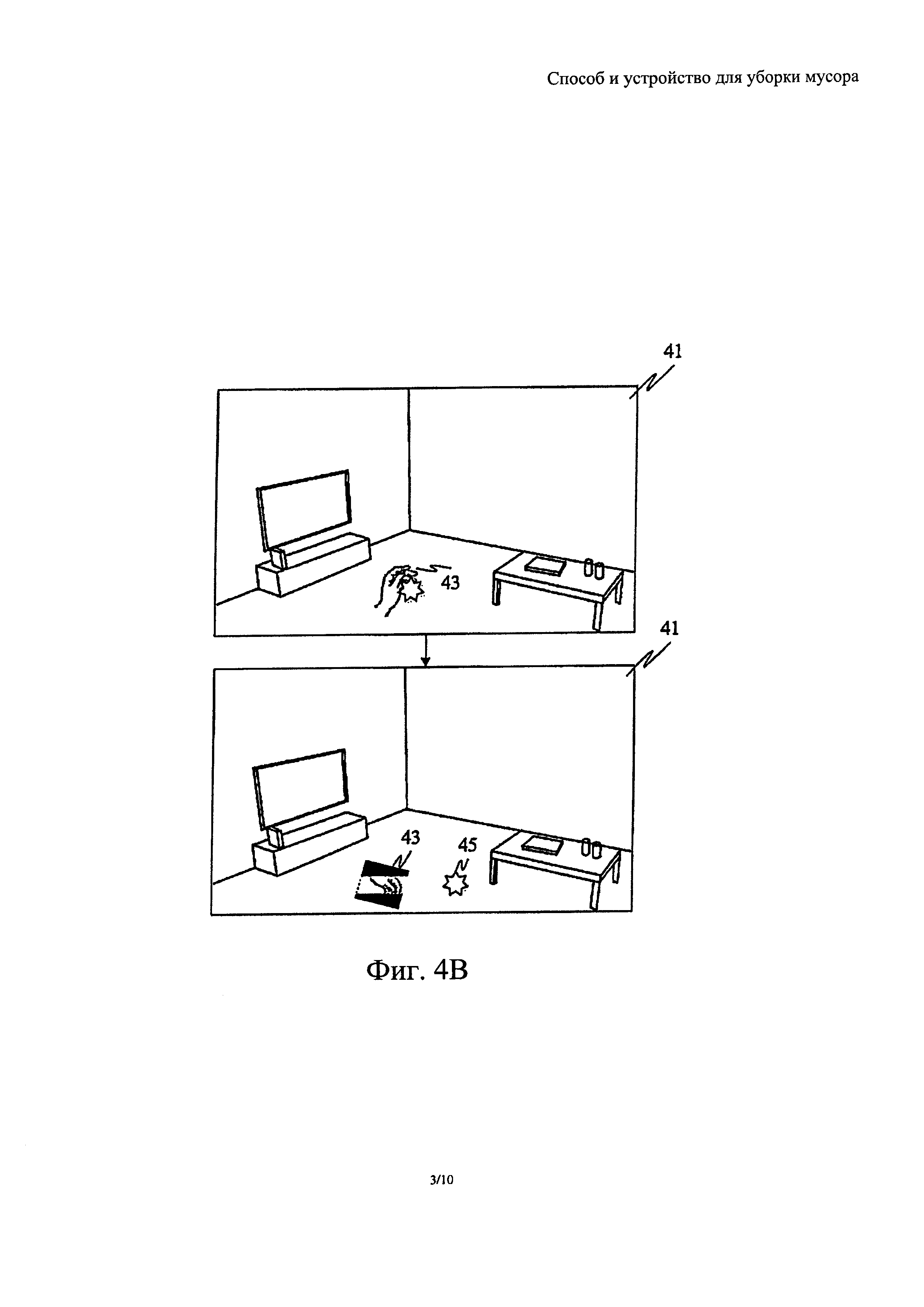
[0082] Фиг. 4В является схемой сценария выполнения способа уборки мусора согласно варианту осуществления, показанному на фиг.4А;
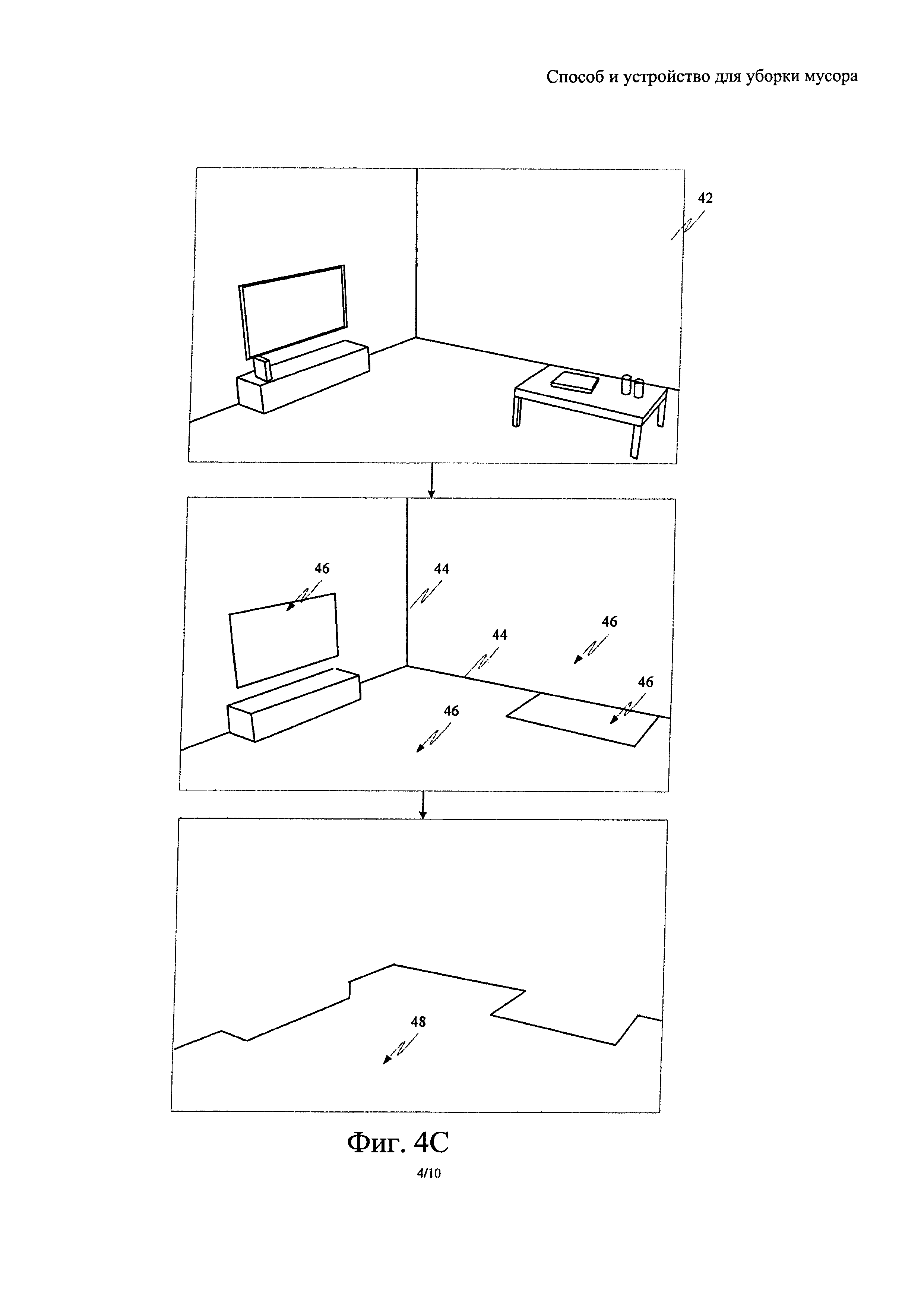
[0083] Фиг. 4С является схемой сценария выполнения способа уборки мусора согласно варианту осуществления, показанному на фиг. 4А;
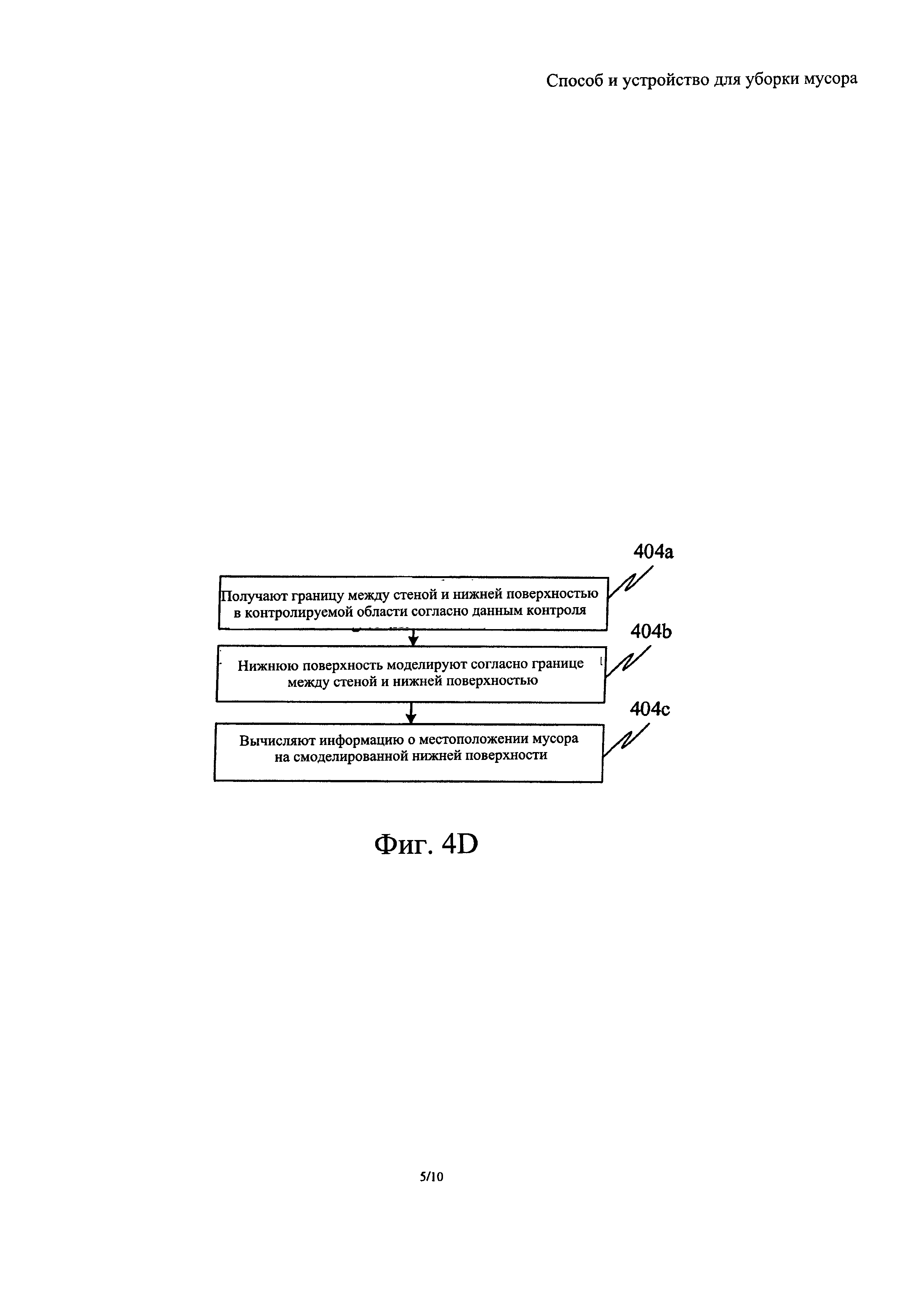
[0084] Фиг. 4D является блок-схемой, поясняющей шаг 404 в способе уборки мусора согласно варианту осуществления, показанному на фиг. 4А;
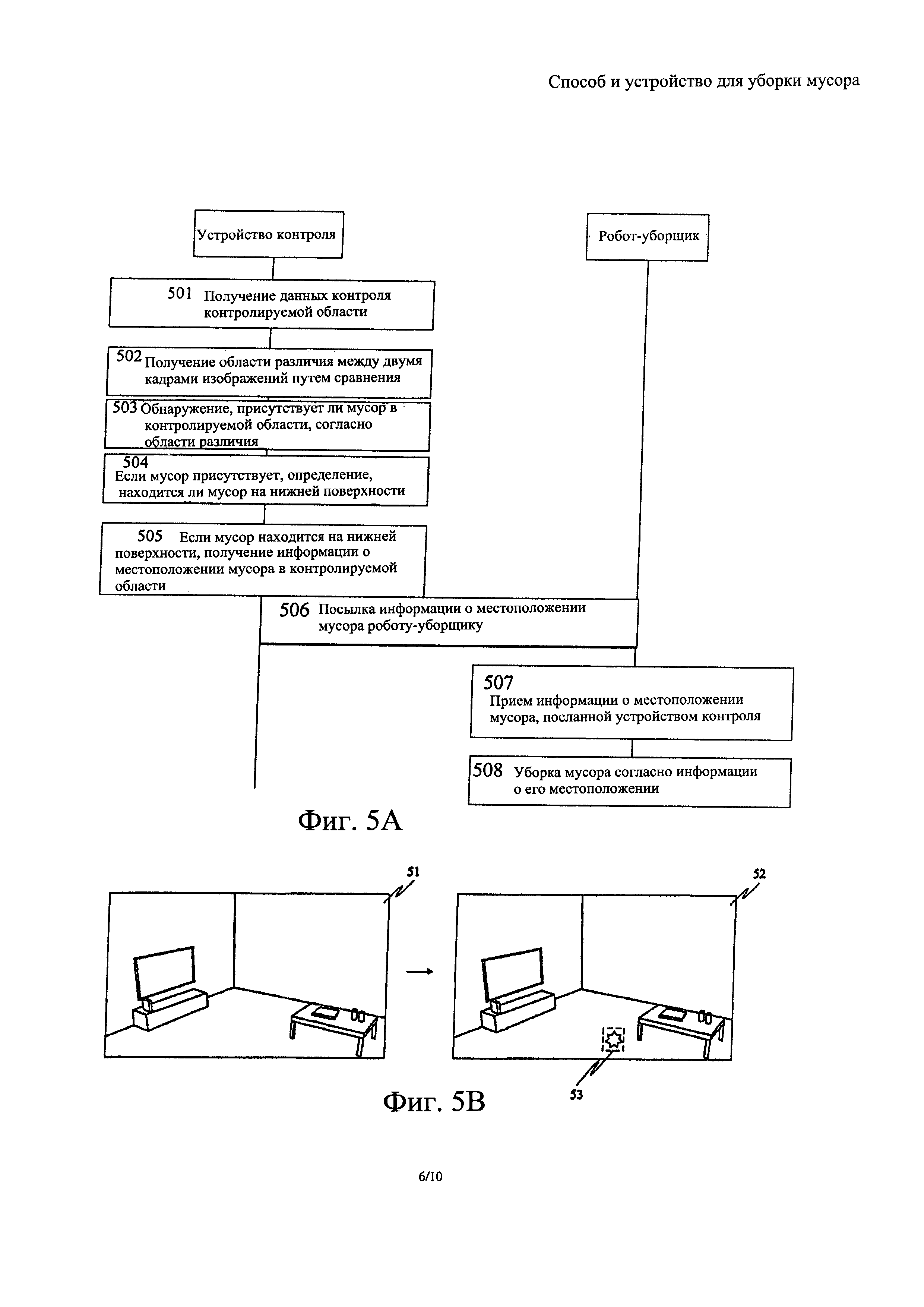
[0085] Фиг. 5А является блок-схемой, поясняющей способ уборки мусора согласно другому примеру осуществления изобретения;
[0086] Фиг. 5В является схемой сценария выполнения способа уборки мусора согласно варианту осуществления, показанному на фиг. 5А;
[0087] Фиг. 6А является блок-схемой, поясняющей способ уборки мусора согласно другому примеру осуществления изобретения;
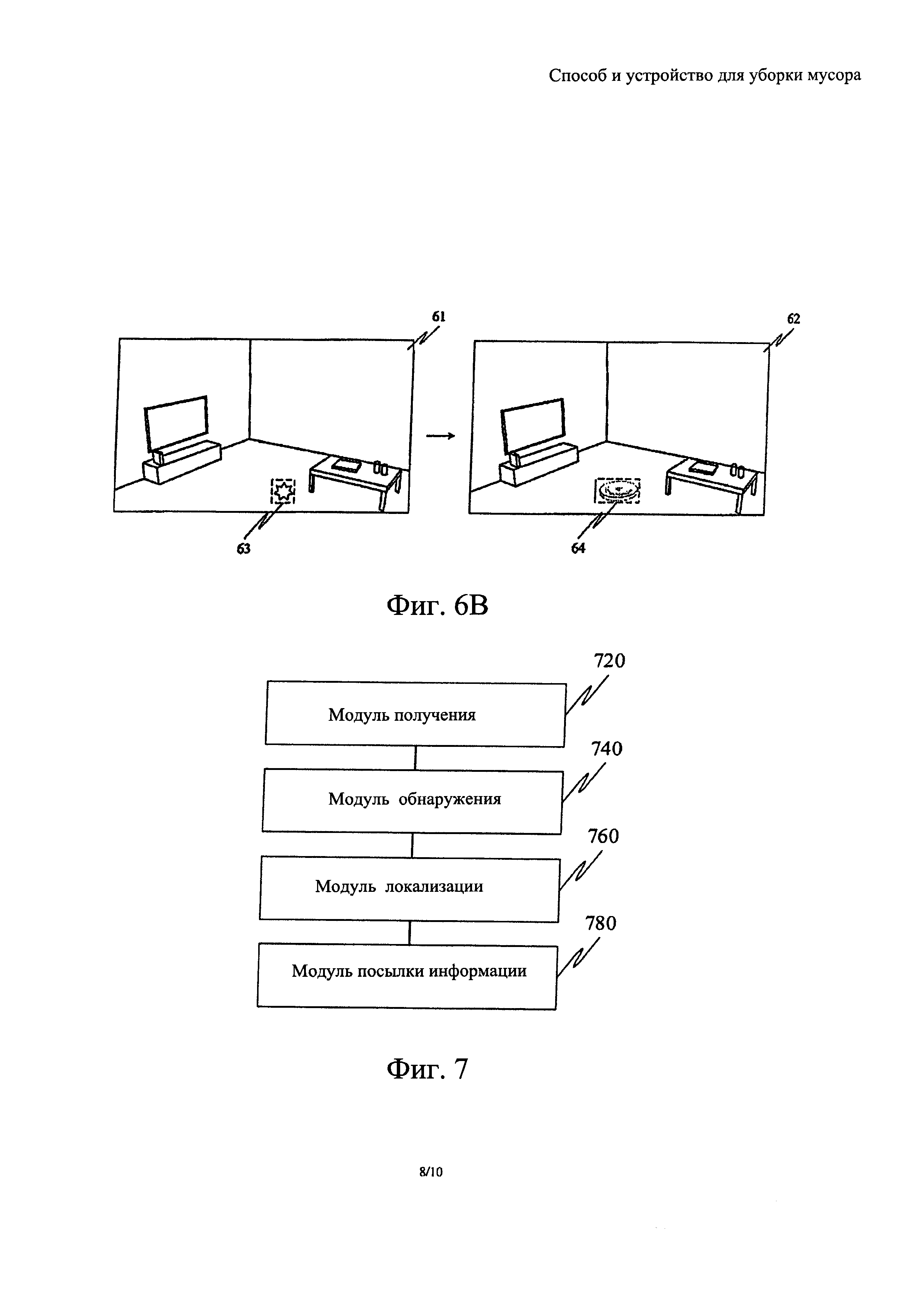
[0088] Фиг. 6В является схемой сценария выполнения способа уборки мусора согласно варианту осуществления, показанному на фиг. 6А;
[0089] Фиг. 7 является блок-схемой, поясняющей устройство для уборки мусора согласно примеру осуществления изобретения;
[0090] Фиг. 8 является блок-схемой, поясняющей устройство для уборки мусора согласно другому примеру осуществления изобретения;
[0091] Фиг. 9 является блок-схемой, поясняющей устройство для уборки мусора согласно примеру осуществления изобретения;
[0092] Фиг. 10 является блок-схемой, поясняющей устройство для уборки мусора согласно примеру осуществления изобретения; и
[0093] Фиг. 11 является блок-схемой, поясняющей устройство для уборки мусора согласно другому примеру осуществления изобретения.
[0094] Посредством вышеупомянутых сопровождающих чертежей показаны конкретные варианты осуществления изобретения, более подробное описание которых будет дано ниже. Эти чертежи и текстовое описание не предназначены для ограничения изобретения в любом отношении, а служат для объяснения специалистам концепции изобретения посредством частных вариантов его осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0095] Далее будут подробно рассмотрены варианты осуществления, примеры которых поясняются на сопровождающих чертежах. Следующее описание относится к сопровождающим чертежам, на которых одинаковые номера на различных чертежах представляют одинаковые или подобные элементы, если не указано иначе. Примеры осуществления, рассмотренные в следующем описании вариантов осуществления, не представляют все возможные варианты выполнения, совместимые с изобретением. Это просто примеры устройств и способов, совместимых с аспектами изобретения, изложенными в приложенной формуле изобретения.
[0096] Фиг. 1 является структурной схемой, поясняющей среду выполнения способа уборки мусора согласно варианту осуществления изобретения; среда выполнения способа может включать устройство 120 контроля и робота-уборщика 140.
[0097] Устройство 120 контроля может быть камерой видеонаблюдения, имеющей вычислительные возможности. Устройство 120 контроля может также быть комбинацией электронных устройств, имеющих вычислительные возможности, и обычной камеры видеонаблюдения. Электронные устройства, имеющие вычислительные возможности, могут быть смартфоном, планшетным компьютером, персональным компьютером, сервером и т.п.
[0098] Устройство 120 контроля может сообщаться с роботом-уборщиком 140 посредством сигналов беспроводной связи. Сигналы беспроводной связи могут быть любыми из сигналов Bluetooth, инфракрасных сигналов, сигналов Wi-Fi и акустических сигналов.
[0099] Робот-уборщик 140 является роботом, способным к уборке мусора. Робот-уборщик 140 может быть роботом для подметания, роботом для чистки шваброй и т.п.
[0100] Фиг. 2 является блок-схемой, поясняющей способ уборки мусора согласно примеру осуществления изобретения. В данном варианте осуществления в способе уборки мусора применяется, например, устройство контроля, показанное на фиг. 1. Способ уборки мусора может включать следующие шаги:
[0101] На шаге 201 получают данные контроля контролируемой области.
[0102] На шаге 202 обнаруживают, присутствует ли мусор в контролируемой области, согласно данным контроля.
[0103] На шаге 203, если мусор присутствует в контролируемой области, получают информацию о местоположении мусора в контролируемой области.
[0104] На шаге 204 информацию о местоположении мусора посылают роботу-уборщику, который конфигурирован для уборки мусора согласно информации о местоположении.
[0105] Соответственно, в способе уборки мусора, предложенном в этом варианте осуществления, получают данные контроля контролируемой области; обнаруживают, согласно данным контроля, присутствует ли мусор в контролируемой области; если мусор присутствует в контролируемой области, получают информацию о местоположении мусора в контролируемой области; и посылают информацию о местоположении мусора роботу-уборщику, конфигурированному для уборки мусора согласно информации о местоположении. Это решает проблему низкой эффективности робота-уборщика и дает эффекты своевременной уборки мусора и точной уборки мусора согласно информации о местоположении.
[0106] Фиг. 3 является блок-схемой, поясняющей способ уборки мусора согласно другому примеру осуществления изобретения. В данном варианте осуществления в способе уборки мусора используется, например, робот-уборщик, показанный на фиг. 1. Способ уборки мусора может включать следующие шаги:
[0107] На шаге 301 принимают информацию о местоположении мусора, посланную устройством контроля.
[0108] При этом устройство контроля выполняет получение данных контроля контролируемой области; обнаружение, согласно данным контроля, присутствует ли мусор в контролируемой области; если мусор присутствует в контролируемой области, то информация о местоположении мусора - это полученная информация, посылаемая роботу-уборщику.
[0109] На шаге 302 мусор убирают согласно информации о его местоположении.
[0110] Соответственно, в способе уборки мусора, предложенном в этом варианте осуществления, робот-уборщик принимает информацию о местоположении мусора, посланную устройством контроля, и убирает мусор согласно информации о местоположении. Это решает проблему низкой эффективности робота-уборщика и дает эффекты своевременной уборки мусора и точной уборки мусора согласно информации о местоположении.
[0111] Фиг. 4А является блок-схемой, поясняющей способ уборки мусора согласно другому примеру осуществления изобретения. В данном варианте осуществления способ уборки мусора выполняется, например, в среде выполнения, показанной на фиг. 1. Способ уборки мусора может включать следующие шаги:
[0112] На шаге 401 устройство контроля получает данные контроля контролируемой области.
[0113] Данные контроля могут быть изображением или видео.
[0114] Когда устройство контроля - это камера видеонаблюдения, изображение или видео контролируемой области получают посредством этой камеры.
[0115] Когда устройство контроля - это комбинация электронных устройств, имеющих вычислительные возможности, и камеры видеонаблюдения, изображение или видео контролируемой области могут быть получены электронными устройствами через камеру видеонаблюдения.
[0116] При этом видео можно рассматривать как последовательные кадры изображений.
[0117] На шаге 402 устройство контроля оценивает, согласно по меньшей мере одному кадру изображения в данных контроля, производит ли действие пользователя мусор.
[0118] Так как мусор, главным образом, производится действием пользователя, устройство контроля может оценивать, производит ли действие пользователя мусор, согласно по меньшей мере одному кадру изображения.
[0119] Как пример выполнения, этот шаг может включать следующие под шаги:
[0120] Во-первых, устройство контроля определяет, имеет ли место действие пользователя по меньшей мере в одном кадре изображения.
[0121] По меньшей мере один кадр изображения может быть по меньшей мере одним из последовательных кадров изображений в видеоданных. По меньшей мере один кадр изображения может также быть по меньшей мере одним кадром изображений, собранных за заранее заданный интервал времени; например, изображение может формироваться каждую секунду.
[0122] Во-вторых, если пользовательское действие имеет место, устройство контроля обнаруживает, имеется ли двигающийся предмет, соответствующий этому действию.
[0123] В-третьих, если двигающийся предмет, соответствующий действию, имеется, устройство контроля определяет, является ли двигающийся предмет мусором, согласно заранее заданной библиотеке признаков мусора.
[0124] Например, как показано на фиг. 4В, устройство контроля может определить, что пользователь производит действие взмаха рукой, согласно по меньшей мере одному кадру изображения 41. Устройство контроля может также определить, что двигающийся предмет 45, соответствующий действию 43 взмаха рукой, присутствует по меньшей мере в одном кадре изображения 41. Затем устройство контроля идентифицирует двигающийся предмет 45 как выброшенную бумагу, согласно заранее заданной библиотеке признаков мусора. Тогда определяется, что мусор присутствует в контролируемой области.
[0125] На шаге 403, если мусор присутствует в контролируемой области, устройство контроля определяет, находится ли мусор на нижней поверхности контролируемой области.
[0126] Так как обычно робот-уборщик способен к обработке мусора только на нижней поверхности, устройство контроля может опционально обнаруживать, находится ли мусор на нижней поверхности контролируемой области.
[0127] Как пример выполнения, как показано на фиг. 4С, устройство контроля может заранее получить изображение 42, на котором не присутствует никакой двигающийся предмет. Затем устройство контроля распознает различные линии 44 границ в изображении 42 посредством алгоритма обнаружения границ и разбивает изображение 42 по меньшей мере на одну область 46 согласно различным линиям 44 границ. Наконец, устройство контроля идентифицирует область 48 нижней поверхности по меньшей мере в одной области 46 согласно заранее заданной библиотеке признаков нижней поверхности или путем операций ручной установки пользователем.
[0128] Устройство контроля может обнаруживать, находится ли мусор в области 48 нижней поверхности.
[0129] На шаге 404, если мусор находится на нижней поверхности контролируемой области, устройство контроля получает информацию о местоположении мусора в контролируемой области.
[0130] Как пример выполнения, этот шаг может включать следующие подшаги, как показано на фиг. 4D.
[0131] На подшаге 404а, границу между стеной и нижней поверхностью в контролируемой области получают согласно данным контроля.
[0132] Устройство контроля получает границу между стеной и нижней поверхностью в контролируемой области посредством алгоритма обнаружения границ. Опционально, устройство контроля может также получить границу между стенами в контролируемой области посредством алгоритма обнаружения границ.
[0133] На подшаге 404b, нижнюю поверхность моделируют согласно границе между стеной и нижней поверхностью в контролируемой области.
[0134] Устройство контроля моделирует нижнюю поверхность в трех измерениях согласно границе между стеной и нижней поверхностью и границе между стенами. Так как угол в доме - обычно прямой угол, устройство контроля может смоделировать нижнюю поверхность в контролируемой области согласно углам между различными границами и на основании принципа перспективы. Когда статичный объект, такой как мебель и домашний электроприбор, в контролируемой области является объектом из заранее заданной библиотеки объектов, устройство контроля может также получить фактический размер нижней поверхности путем осуществления преобразования согласно фактическому размеру статического предмета и его размеру на изображении.
[0135] На подшаге 404 с вычисляют информацию о местоположении мусора на смоделированной нижней поверхности.
[0136] Следовательно, устройство контроля вычисляет информацию о местоположении мусора на смоделированной нижней поверхности.
[0137] Следует заметить, что подшаг 404а и подшаг 404b не выполняют в ограниченных временных рамках; они могут быть выполнены во время первоначальной установки или в любое время простоя.
[0138] На шаге 405 устройство контроля посылает информацию о местоположении мусора роботу-уборщику.
[0139] Устройство контроля может немедленно послать информацию о местоположении мусора роботу-уборщику.
[0140] Устройство контроля может также послать информацию о местоположении мусора роботу-уборщику, когда никакой двигающийся предмет не присутствует в контролируемой области. Когда двигающиеся предметы отсутствуют в контролируемой области, это обычно означает, что пользователь покинул эту область, и операция робота-уборщика по уборке не может помешать пользователю.
[0141] На шаге 406 робот-уборщик принимает информацию о местоположении мусора, посланную устройством контроля.
[0142] На шаге 407 робот-уборщик убирает мусор согласно информации о местоположении мусора.
[0143] Робот-уборщик двигается в область нижней поверхности, соответствующую информации о местоположении мусора, и затем убирает мусор в этой области нижней поверхности.
[0144] Соответственно, в способе уборки мусора, предложенном в этом варианте осуществления, получают данные контроля контролируемой области; обнаруживают, согласно данным контроля, присутствует ли мусор в контролируемой области; если мусор присутствует в контролируемой области, получают информацию о местоположении мусора в контролируемой области; и эту информацию о местоположении мусора посылают роботу-уборщику, который конфигурирован для уборки мусора согласно информации о местоположении мусора. Это решает проблему низкой эффективности робота-уборщика и дает эффекты своевременной уборки мусора и точной уборки мусора согласно информации о местоположении.
[0145] Также, согласно способу уборки мусора, предложенному в этом варианте осуществления, оценивают, согласно по меньшей мере одному кадру изображения, производит ли действие пользователя мусор; и, таким образом, механизм оценки наличия мусора может быть запущен только тогда, когда пользовательское действие присутствует в данных контроля. Это улучшает эффективность оценки наличия мусора устройством контроля и уменьшает ненужную рабочую нагрузку.
[0146] Кроме того, согласно способу уборки мусора, предложенному в этом варианте осуществления, границу между стеной и нижней поверхностью в контролируемой области получают согласно данным контроля, и нижнюю поверхность моделируют согласно различным границам в контролируемой области. Таким образом, информация о местоположении мусора в контролируемой области может быть точно вычислена.
[0147] Фиг. 5А является блок-схемой, поясняющей способ уборки мусора согласно другому примеру осуществления изобретения. В данном варианте осуществления способ уборки мусора применяют, например, в среде выполнения, показанной на фиг. 1. Способ уборки мусора может включать следующие шаги:
[0148] На шаге 501 устройство контроля получает данные контроля контролируемой области.
[0149] Данные контроля могут быть изображением или видео.
[0150] Когда устройство контроля - это камера видеонаблюдения, изображение или видео контролируемой области получают посредством этой камеры.
[0151] Когда устройство контроля - это комбинация электронных устройств, имеющих вычислительные возможности, и камеры видеонаблюдения, изображение или видео контролируемой области могут быть получены электронными устройствами через камеру видеонаблюдения.
[0152] При этом видео можно рассматривать как последовательные кадры изображений.
[0153] На шаге 502 устройство контроля получает область различия между двумя кадрами изображений из данных контроля путем сравнения.
[0154] Сначала устройство контроля извлекает два кадра изображений из данных контроля.
[0155] Два кадра изображений могут быть двумя смежными кадрами изображений в видеоданных, например, кадром изображения с номером n и кадром изображения с номером n+1.
[0156] Два кадра изображений могут также быть двумя смежными кадрами изображений, которые получают с заранее заданным интервалом, например, изображением в момент t секунд и изображением в момент t+5 секунд через каждые 5 секунд.
[0157] Один кадр изображения в двух кадрах изображений - это фоновое изображение без двигающихся объектов, а другой кадр изображения - самое последнее изображение из данных контроля. Фоновое изображение без двигающихся объектов может быть фоновым изображением, полученным устройством контроля, когда пользователь был вне дома, и после того, как робот-уборщик выполнил общую уборку.
[0158] Устройство контроля получает область различия между двумя кадрами изображений путем сравнения.
[0159] На фиг. 5В изображение 51 является фоновым изображением без двигающихся объектов, а изображение 52 является самым последним изображением из данных контроля, и устройство контроля получает область 53 различия между двумя кадрами изображений путем сравнения.
[0160] На шаге 503 устройство контроля обнаруживает, присутствует ли мусор в контролируемой области, согласно этой области различия.
[0161] После того, как устройство контроля обнаруживает область различия для кадра изображения, полученного в более поздний момент среди двух кадров изображений, устройство контроля определяет, присутствует ли мусор в области этой различия на изображении согласно заранее заданной библиотеке признаков мусора.
[0162] На шаге 504, если мусор присутствует в контролируемой области, устройство контроля обнаруживает, находится ли мусор на нижней поверхности контролируемой области.
[0163] Так как обычно робот-уборщик способен к обработке мусора только на нижней поверхности, устройство контроля может опционально обнаруживать, находится ли мусор на нижней поверхности контролируемой области. Процесс обнаружения может быть выполнен согласно шагу 403.
[0164] Следует заметить, что альтернативное выполнение шага 503 и шага 504 может быть следующим: устройство контроля обнаруживает, накладывается ли область различия на область нижней поверхности в контролируемой области; и если накладывается, то устройство контроля выполняет шаг определения, присутствует ли мусор в области различия в изображении, согласно заранее заданной библиотеке признаков мусора.
[0165] На шаге 505, если мусор находится на нижней поверхности контролируемой области, устройство контроля получает информацию о местоположении мусора в контролируемой области.
[0166] Получение информации о местоположении мусора устройством контроля может быть выполнено согласно шагу 404.
[0167] На шаге 506 устройство контроля посылает информацию о местоположении мусора роботу-уборщику.
[0168] Устройство контроля может немедленно послать информацию о местоположении мусора роботу-уборщику.
[0169] Устройство контроля может также послать информацию о местоположении мусора роботу-уборщику, когда никакой двигающийся предмет не присутствует в контролируемой области. Когда двигающиеся предметы отсутствуют в контролируемой области, это обычно означает, что пользователь покинул эту область, и операция робота-уборщика по уборке не может помешать пользователю.
[0170] На шаге 507 робот-уборщик принимает информацию о местоположении мусора, посланную устройством контроля.
[0171] На шаге 508 робот-уборщик убирает мусор согласно информации о местоположении мусора.
[0172] Робот-уборщик двигается в область нижней поверхности, соответствующую информации о местоположении мусора, и затем убирает мусор в этой области нижней поверхности.
[0173] Соответственно, в способе уборки мусора, предложенном в этом варианте осуществления, получают данные контроля контролируемой области; обнаруживают, согласно данным контроля, присутствует ли мусор в контролируемой области; если мусор присутствует в контролируемой области, получают информацию о местоположении мусора в контролируемой области; и эту информацию о местоположении мусора посылают роботу-уборщику, который конфигурирован для уборки мусора согласно информации о местоположении. Это решает проблему низкой эффективности робота-уборщика и дает эффекты своевременной уборки мусора и точной уборки мусора согласно информации о местоположении.
[0174] Также, согласно способу уборки мусора, предложенному в этом варианте осуществления, обнаруживают присутствие мусора, получая путем сравнения область различия между двумя кадрами изображений из данных контроля. Вычислительная нагрузка уменьшается, и скорость вычислений увеличивается, поэтому это решение может быть осуществлено в устройстве контроля с низкой вычислительной способностью, и таким образом может иметь широкое применение.
[0175] Фиг. 6А является блок-схемой, поясняющей способ уборки мусора согласно другому примеру осуществления изобретения. В данном варианте осуществления способ уборки мусора применяют, например, в среде выполнения, показанной на фиг. 1. Способ уборки мусора может включать следующие шаги:
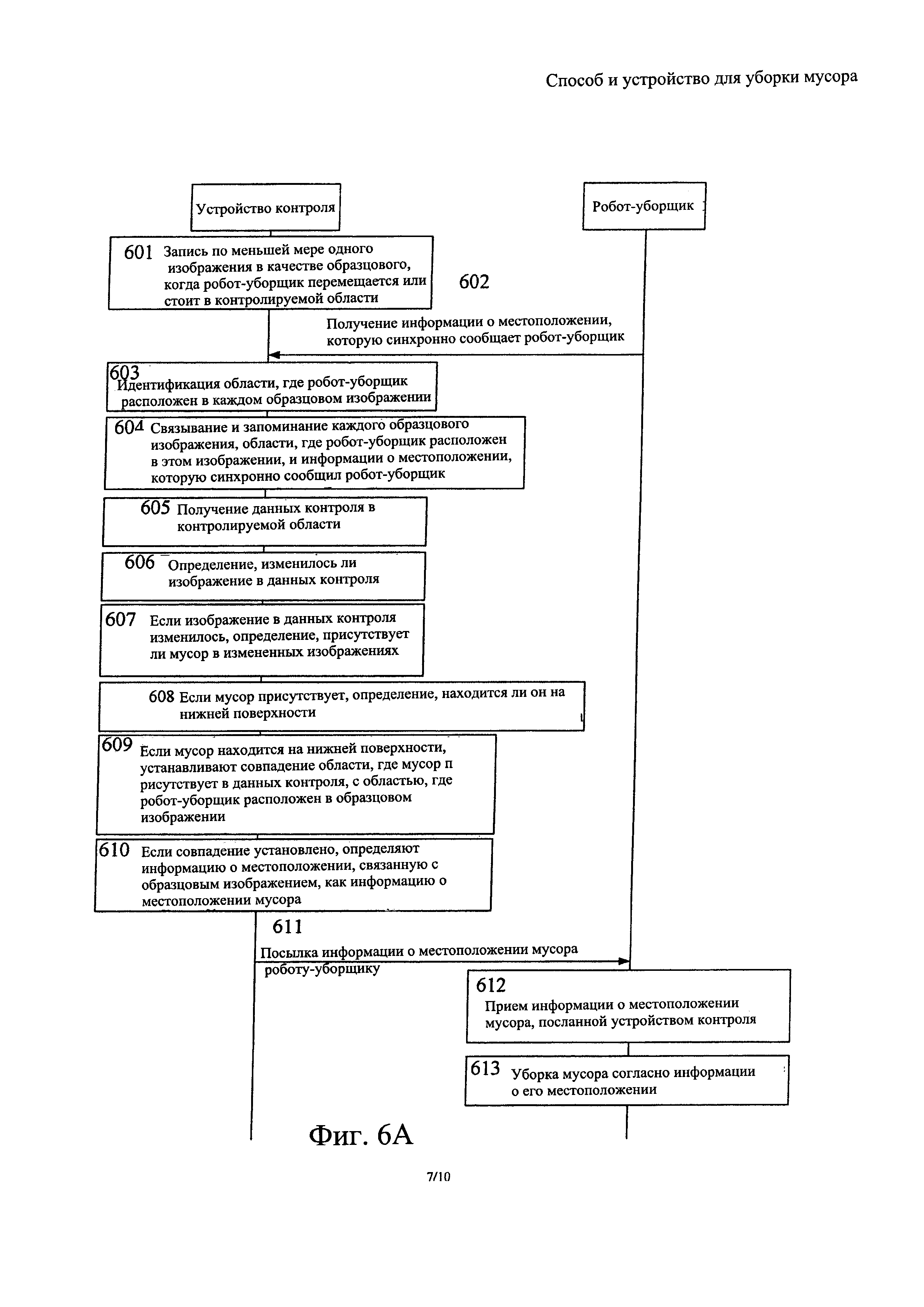
[0176] На шаге 601 устройство контроля делает запись по меньшей мере одного изображения в качестве образцового изображения, когда робот-уборщик перемещается или стоит в контролируемой области.
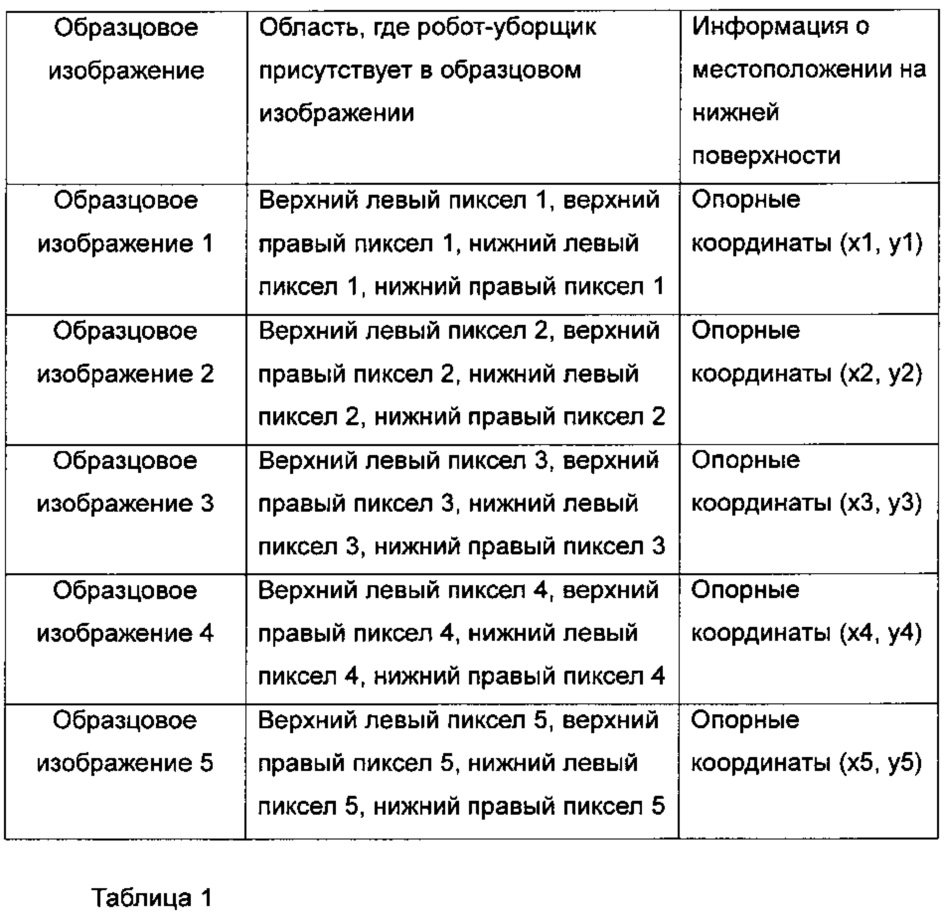
[0177] Некоторые роботы-уборщики сами могут генерировать информацию о местоположении на нижней поверхности. Например, робот-уборщик использует технологию многоточечной матрицы позиционирования, чтобы выразить информацию о местоположении на нижней поверхности, используя опорные координаты. Устройство контроля может использовать информацию о местоположении, генерируемую самим роботом-уборщиком.
[0178] Как пример выполнения, когда робот-уборщик находится в состоянии уборки, устройство контроля делает запись по меньшей мере одного изображения в качестве образцового изображения, когда робот-уборщик передвигается или стоит в контролируемой области. Например, когда робот-уборщик начинает работать, сигнал старта посылают в устройство контроля; и после получения сигнала старта устройство контроля берет по меньшей мере одно изображение из данных контроля как образцовое изображение.
[0179] На шаге 602 устройство контроля принимает информацию о местоположении, которую синхронно сообщает робот-уборщик в процессе записи.
[0180] В этом процессе робот-уборщик может синхронно сообщать информацию о своем местоположении. Часть информации о местоположении, в качестве примера, включает "время сообщения: час хх минута хх секунда хх месяц хх день хх год хх: информация о местоположении: опорные координаты (x, y)".
[0181] Соответственно, устройство контроля получает информацию о местоположении, которую синхронно сообщает робот-уборщик в процессе записи.
[0182] На шаге 603 устройство контроля идентифицирует область, где робот-уборщик расположен в каждом образцовом изображении.
[0183] Особенности верхней крышки робота-уборщика могут быть заранее заданы в устройстве контроля, и область, где робот-уборщик расположен в образцовом изображении, может быть идентифицирована согласно особенностям верхней крышки робота-уборщика.
[0184] На шаге 604 устройство контроля связывает и запоминает каждое образцовое изображение, область, где робот-уборщик расположен в образцовом изображении, и информацию о местоположении, которую синхронно сообщил робот-уборщик.
[0185] Таблица 1 представляет пример связей, хранимых в устройстве контроля.
[0186] На шаге 605 данные контроля в контролируемой области получают посредством устройства контроля.
[0187] В обычном процессе контроля устройство контроля получает данные контроля в контролируемой области, при этом данные контроля могут быть изображением или видеоданными.
[0188] Когда устройство контроля - это камера видеонаблюдения, изображение или видео контролируемой области получают посредством этой камеры.
[0189] Когда устройство контроля - это комбинация электронных устройств, имеющих вычислительные возможности, и камеры видеонаблюдения, изображение или видео контролируемой области могут быть получены электронными устройствами через камеру видеонаблюдения.
[0190] При этом видео можно рассматривать как последовательные кадры изображений.
[0191] На шаге 606 устройство контроля обнаруживает, изменилось ли изображение в данных контроля.
[0192] Устройство контроля может обнаружить, имеют ли место изменения между двумя смежными кадрами изображений.
[0193] Альтернативно, устройство контроля обнаруживает, изменилось ли изображение в данных контроля по сравнению с фоновым изображением без двигающихся объектов. Фоновое изображение без двигающихся объектов может быть фоновым изображением, полученным устройством контроля, когда пользователь был вне дома, и после того, как робот-уборщик выполнил общую уборку.
[0194] На шаге 607, если изображение в данных контроля изменилось, устройство контроля определяет, присутствует ли мусор в измененных изображениях.
[0195] Устройство контроля определяет, присутствует ли мусор в измененном изображении, согласно заранее заданной библиотеке признаков мусора.
[0196] На шаге 608, если мусор присутствует в контролируемой области, устройство контроля определяет, находится ли мусор на нижней поверхности контролируемой области.
[0197] Так как обычно робот-уборщик способен к обработке мусора только на нижней поверхности, устройство контроля может опционально обнаруживать, находится ли мусор на нижней поверхности контролируемой области. Процесс обнаружения может быть выполнен согласно шагу 403.
[0198] Следует заметить, что альтернативное выполнение шагов 606-608 может быть следующим: устройство контроля обнаруживает, изменилась ли область нижней поверхности в изображении из данных контроля; и если область нижней поверхности изменилась, то устройство контроля выполняет шаг определения, присутствует ли мусор в измененном изображении.
[0199] На шаге 609, если мусор находится на нижней поверхности контролируемой области, устройство контроля устанавливает совпадение области, где мусор присутствует в данных контроля, с областью, где робот-уборщик расположен в образцовом изображении.
[0200] Образцовое изображение - это изображение, ранее записанное устройством контроля, когда робот-уборщик передвигался или стоял в контролируемой области, причем каждое образцовое изображение связано с информацией о местоположении, которую синхронно сообщил робот-уборщик.
[0201] Как показано на фиг. 6В, устройство контроля устанавливает совпадение области 63, где расположен мусор согласно данным 61 контроля, с областью 64, где робот-уборщик расположен в образцовом изображении 62. Успешное установление совпадения означает, что степень перекрытия двух областей превышает заранее заданный порог. Образцовое изображение 62 на фиг. 6В может быть образцовым изображением 1, указанным в табл. 1.
[0202] На шаге 610, если совпадение успешно установлено, устройство контроля определяет информацию о местоположении, связанную с соответствующим образцовым изображением, как информацию о местоположении мусора в контролируемой области.
[0203] Если область 63 совпадает с областью 64, где расположен робот-уборщик, и область 64, где расположен робот-уборщик, является образцовым изображением 1, указанным в табл. 1, то устройство контроля определяет опорные координаты (x1, y1) как информацию о местоположении мусора в контролируемой области.
[0204] На шаге 611 устройство контроля посылает информацию о местоположении мусора роботу-уборщику.
[0205] Устройство контроля может немедленно послать информацию о местоположении мусора роботу-уборщику.
[0206] Устройство контроля может также послать информацию о местоположении мусора роботу-уборщику, когда никакой двигающийся предмет не присутствует в контролируемой области. Когда двигающиеся предметы отсутствуют в контролируемой области, это обычно означает, что пользователь покинул эту область, и операция робота-уборщика по уборке не может помешать пользователю.
[0207] На шаге 612 робот-уборщик получает информацию о местоположении мусора, посланную устройством контроля.
[0208] На шаге 613 робот-уборщик убирает мусор согласно информации о местоположении мусора.
[0209] Робот-уборщик двигается в область нижней поверхности, соответствующую информации о местоположении мусора, и затем убирает мусор в этой области нижней поверхности.
[0210] Соответственно, в способе уборки мусора, предложенном в этом варианте осуществления, получают данные контроля контролируемой области; обнаруживают, согласно данным контроля, присутствует ли мусор в контролируемой области; если мусор присутствует в контролируемой области, получают информацию о местоположении мусора в контролируемой области; и эту информацию о местоположении мусора посылают роботу-уборщику, который конфигурирован для уборки мусора согласно информации о местоположении. Это решает проблему низкой эффективности робота-уборщика и дает эффекты своевременной уборки мусора и точной уборки мусора согласно информации о местоположении.
[0211] Также, согласно способу уборки мусора, предложенному в этом варианте осуществления, устройство контроля получает информацию о местоположении мусора согласно информации о местоположении, генерируемой самим роботом-уборщиком. Это понижает рабочую нагрузку, связанную с вычислением информации о местоположении мусора, выполняемым устройством контроля, и понижает требования к вычислительной способностью устройства контроля.
[0212] Следует также заметить, что фиг. 4А, 5А и 6А, соответственно, поясняют три различных способа обнаружения, присутствует ли мусор в контролируемой области, согласно данным контроля. Фиг. 4А и 6А, соответственно, также поясняют два различных способа получения информации о местоположении мусора в контролируемой области. Три различных способа обнаружения и два различных способа получения могут быть комбинированы любым путем, что дает шесть различных вариантов осуществления. Эти варианты осуществления могут быть без труда поняты специалистом на основании вариантов осуществления, поясняемых на фиг. 4А, 5А и 6А, и не будут описываться здесь повторно.
[0213] Ниже будут описаны варианты осуществления устройства согласно изобретению, такие устройства могут использоваться для выполнения вариантов осуществления предложенного способа. За деталями, которые не раскрыты при описании вариантов осуществления устройства, можно обратиться к вариантам осуществления способа согласно изобретению.
[0214] Фиг. 7 является блок-схемой устройства для уборки мусора согласно примеру осуществления изобретения. Устройство для уборки мусора может быть осуществлено с использованием программного обеспечения, аппаратных средств или комбинации программного и аппаратного обеспечения, как устройство контроля в целом или его часть. Устройство для уборки мусора может включать:
[0215] модуль 720 получения, конфигурированный для получения данных контроля контролируемой области;
[0216] модуль 740 обнаружения, конфигурированный для обнаружения, согласно данным контроля, присутствует ли мусор в контролируемой области;
[0217] модуль 760 локализации, конфигурированный для получения информации о местоположении мусора в контролируемой области, если мусор присутствует в контролируемой области; и
[0218] модуль 780 посылки информации, конфигурированный для посылки информации о местоположении мусора роботу-уборщику, конфигурированному для уборки мусора согласно информации о местоположении.
[0219] Соответственно, в устройстве для уборки мусора, предложенном в этом варианте осуществления, получают данные контроля контролируемой области; обнаруживают, согласно данным контроля, присутствует ли мусор в контролируемой области; если мусор присутствует в контролируемой области, получают информацию о местоположении мусора в контролируемой области; и посылают информацию о местоположении мусора роботу-уборщику, конфигурированному для уборки мусора согласно информации о местоположении. Это решает проблему низкой эффективности робота-уборщика и дает эффекты своевременной уборки мусора и точной уборки мусора согласно информации о местоположении.
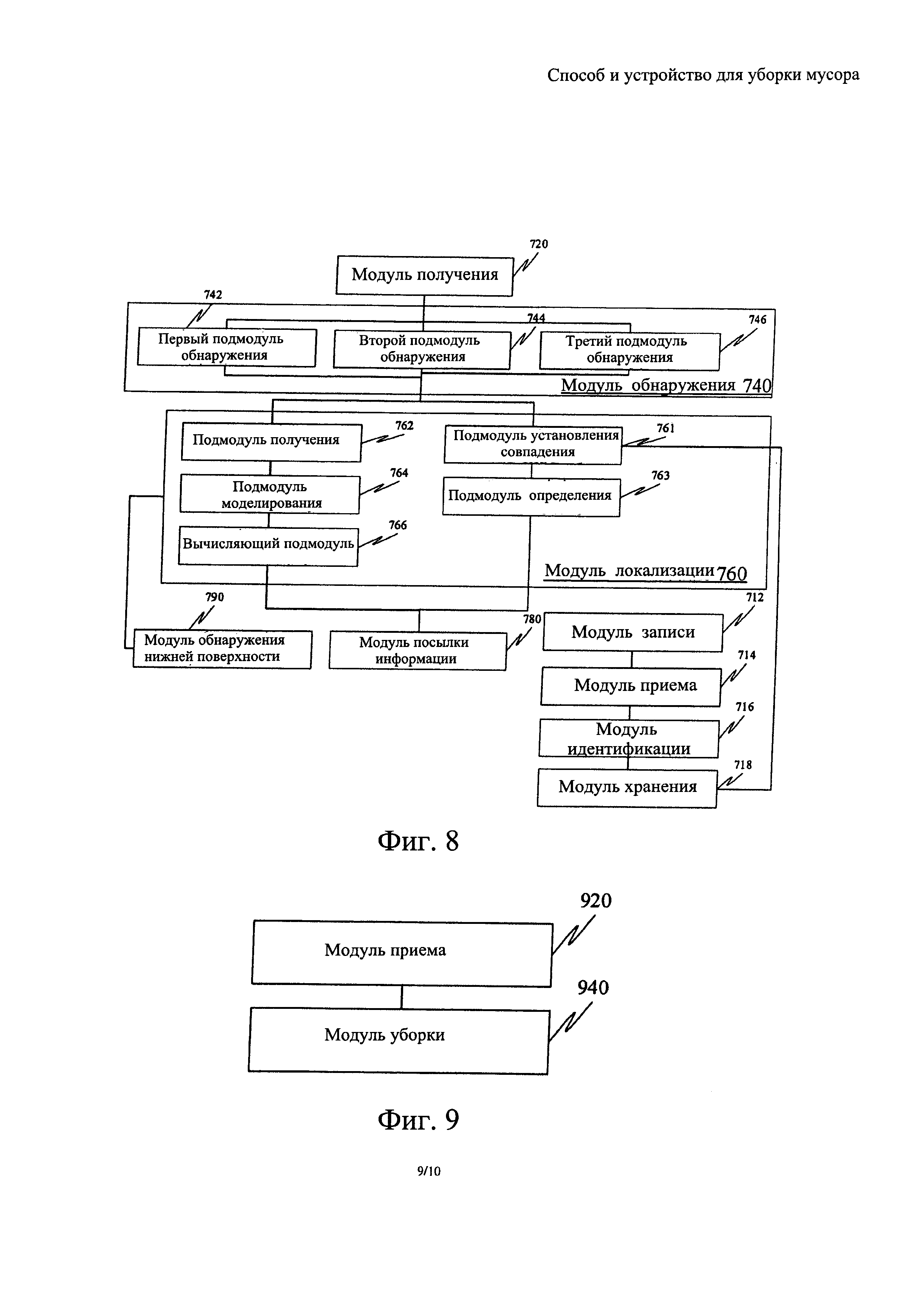
[0220] Фиг. 8 является блок-схемой, поясняющей устройство для уборки мусора согласно примеру осуществления изобретения. Устройство для уборки мусора может быть осуществлено с использованием программного обеспечения, аппаратных средств или комбинации программного и аппаратного обеспечения, как устройство контроля в целом или его часть. Устройство для уборки мусора может включать:
[0221] модуль 720 получения, конфигурированный для получения данных контроля контролируемой области;
[0222] модуль 740 обнаружения, конфигурированный для обнаружения, согласно данным контроля, присутствует ли мусор в контролируемой области;
[0223] модуль 760 локализации, конфигурированный для получения информации о местоположении мусора в контролируемой области, если мусор присутствует в контролируемой области; и
[0224] модуль 780 посылки информации, конфигурированный для посылки информации о местоположении мусора роботу-уборщику, конфигурированному для уборки мусора согласно информации о местоположении.
[0225] Опционально, модуль 740 обнаружения включает:
[0226] первый подмодуль 742 обнаружения, конфигурированный, чтобы оценивать, согласно по меньшей мере одному кадру изображения в данных контроля, производит ли действие пользователя мусор; или
[0227] второй подмодуль 744 обнаружения, конфигурированный для получения области различия между двумя кадрами изображений из данных контроля путем сравнения и для обнаружения, согласно этой области различия, присутствует ли мусор в контролируемой области; или
[0228] третий подмодуль 746 обнаружения, конфигурированный для обнаружения, имеется ли область с измененным фоном в данных контроля; и если область с измененным фоном имеется, для определения, присутствует ли мусор в контролируемой области, согласно этой измененной области.
[0229] Опционально, модуль локализации 760 включает:
[0230] подмодуль 762 получения, конфигурированный для получения границы между стеной и нижней поверхностью в контролируемой области согласно данным контроля;
[0231] подмодуль 764 моделирования, конфигурированный, чтобы моделировать нижнюю поверхность согласно границе между стеной и нижней поверхностью в контролируемой области; и
[0232] вычисляющий подмодуль 766, конфигурированный, чтобы вычислять информацию о местоположении мусора на смоделированной нижней поверхности.
[0233] Опционально, модуль 760 локализации включает:
[0234] подмодуль 761 установления совпадения, конфигурированный для установления совпадения области местоположения мусора, где мусор расположен в данных контроля, с областью, где робот-уборщик расположен по меньшей мере в одном образцовом изображении, при этом образцовое изображение является изображением, ранее записанным устройством контроля, когда робот-уборщик передвигался или стоял в контролируемой области, причем каждое образцовое изображение связано с информацией о местоположении, которую синхронно сообщил робот-уборщик; и
[0235] подмодуль 763 определения, конфигурированный, чтобы определить, если совпадение успешно установлено, информацию о местоположении, связанную с соответствующим образцовым изображением, как информацию о местоположении мусора в контролируемой области.
[0236] Опционально, устройство также включает:
[0237] модуль 712 записи, конфигурированный для записи по меньшей мере одного изображения в качестве образцового изображения, когда робот-уборщик передвигается или стоит в контролируемой области;
[0238] модуль 714 приема, конфигурированный, чтобы принимать информацию о местоположении, которую синхронно сообщает робот-уборщик в процессе записи;
[0239] модуль 716 идентификации, конфигурированный для определения области, где робот-уборщик расположен в каждом образцовом изображении; и
[0240] модуль 718 хранения, конфигурированный для связывания и запоминания каждого образцового изображения, области, где робот-уборщик расположен в образцовом изображении, и информации о местоположении, которую синхронно сообщил робот-уборщик.
[0241] Опционально, устройство также включает:
[0242] модуль 790 обнаружения нижней поверхности, конфигурированный для обнаружения, находится ли мусор на нижней поверхности контролируемой области;
[0243] при этом модуль 760 локализации конфигурирован для выполнения шага получения информации о местоположении мусора в контролируемой области, если мусор находится на нижней поверхности контролируемой области.
[0244] Соответственно, в устройстве для уборки мусора, предложенном в этом варианте осуществления, получают данные контроля контролируемой области; обнаруживают, согласно данным контроля, присутствует ли мусор в контролируемой области; если мусор присутствует в контролируемой области, получают информацию о местоположении мусора в контролируемой области; и посылают информацию о местоположении мусора роботу-уборщику, конфигурированному для уборки мусора согласно информации о местоположении. Это решает проблему низкой эффективности робота-уборщика и дает эффекты своевременной уборки мусора и точной уборки мусора согласно информации о местоположении.
[0245] Также, в устройстве для уборки мусора, предложенном в этом варианте осуществления, согласно данным контроля получают границу между стеной и нижней поверхностью в контролируемой области, и нижнюю поверхность моделируют согласно границе между стеной и нижней поверхностью в контролируемой области. Таким образом, информация о местоположении мусора в контролируемой области может быть точно вычислена.
[0246] Кроме того, в устройстве для уборки мусора в этом варианте осуществления обнаруживают, присутствует ли мусор, получая путем сравнения область различия между двумя кадрами изображений из данных контроля. Вычислительная нагрузка уменьшается, и скорость вычислений увеличивается, поэтому это решение может быть осуществлено в устройстве контроля с низкой вычислительной способностью, и таким образом может иметь широкое применение.
[0247] В устройстве для уборки мусора, предложенном в этом варианте осуществления, устройство контроля получает информацию о местоположении мусора согласно информации о местоположении, генерируемой роботом-уборщиком. Это понижает рабочую нагрузку, связанную с вычислением информации о местоположении мусора, выполняемым устройством контроля, и понижает требования к вычислительной способностью устройства контроля.
[0248] Фиг. 9 является блок-схемой, поясняющей устройство для уборки мусора согласно примеру осуществления изобретения. Устройство для уборки мусора может быть осуществлено с использованием программного обеспечения, аппаратных средств или комбинации программного и аппаратного обеспечения, как робот-уборщик в целом или его часть. Устройство для уборки мусора может включать:
[0249] модуль 920 приема, конфигурированный, чтобы принимать информацию о местоположении мусора, посланную устройством контроля. При этом устройство контроля выполняет получение данных контроля контролируемой области; обнаружение, согласно данным контроля, присутствует ли мусор в контролируемой области; если мусор присутствует в контролируемой области, то информация о местоположении мусора - это полученная информация, посылаемая роботу-уборщику.
[0250] модуль 940 уборки, конфигурированный для уборки мусора согласно информации о местоположении.
[0251] Соответственно, в устройстве для уборки мусора, предложенном в этом варианте осуществления, робот-уборщик получает информацию о местоположении мусора, посланную устройством контроля, и убирает мусор согласно этой информации о местоположении. Это решает проблему низкой эффективности робота-уборщика и дает эффекты своевременной уборки мусора и точной уборки мусора согласно информации о местоположении.
[0252] Относительно устройств в вышеупомянутых вариантах осуществления изобретения, конкретное выполнение операций, выполняемых различными модулями этих устройств, было описано подробно в вариантах осуществления изобретения, поясняющих предложенные способы, и повторно здесь не приводится.
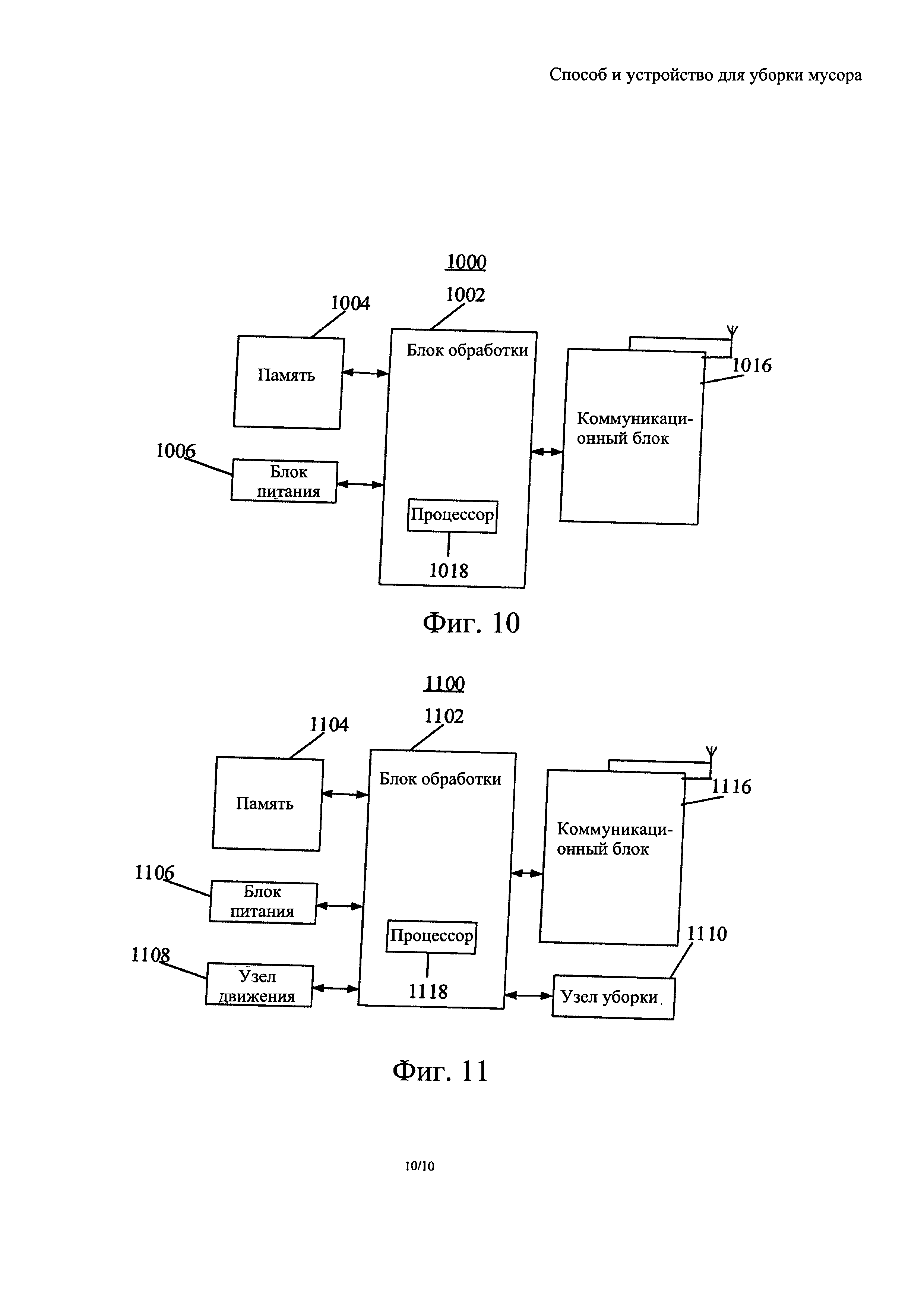
[0253] Фиг. 10 является блок-схемой, поясняющей устройство для уборки мусора 1000 согласно примеру осуществления изобретения. Например, устройство 1000 может быть камерой видеоконтроля, комбинацией камеры видеоконтроля и сервера, или комбинацией камеры видеоконтроля и мобильного терминала.
[0254] Как показано на фиг. 10, устройство 1000 может включать один или более компонент из следующих: блок 1002 обработки, память 1004, блок 1006 питания и коммуникационный блок 1016.
[0255] Блок 1002 обработки обычно управляет всеми операциями устройства 1000, включая такие операции как разрешение адреса, прием данных, управление трафиком передачи и т.п. Блок 1002 обработки может включать один или более процессор 1018, чтобы исполнять команды для выполнения всех или части шагов в вышеописанных способах. Кроме того, блок 1002 обработки может включать один или более модуль, которые обеспечивают взаимодействие между блоком 1002 обработки и другими компонентами.
[0256] Память 1004 конфигурируется, чтобы хранить различные типы данных для поддержки операций устройства 1000. Примеры таких данных включают команды для выполнения любого приложения или способа в устройстве 1000, пользовательские данные и т.п. Память 1004 может быть реализована с использованием любого типа энергозависимых или энергонезависимых устройств памяти, или их комбинации, таких как статическая память произвольного доступа (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитная память, флэш-память, магнитный или оптический диск. Память 1004 также хранит один или более модулей, которые конфигурированы для исполнения на одном или более процессорах 1018, чтобы осуществить все или часть шагов в вышеописанном способе уборки мусора.
[0257] Блок 1006 питания подает питание к различным узлам устройства 1000. Блок 1006 питания может включать систему управления электропитанием, один или более источников питания и другие компоненты, связанные с генерацией, управлением и распределением мощности питания в устройстве 1000.
[0258] Коммуникационный блок 1016 конфигурируется, чтобы обеспечить проводную или беспроводную связь между устройством 1000 и другими устройствами. Устройство 1000 может установить беспроводную сеть связи, основанную на стандарте, например, сеть Wi-Fi. В примере осуществления коммуникационный блок 1016 передает вещательный сигнал или передает в вещательном режиме соответствующую информацию через канал вещания.
[0259] В примерах осуществления устройство 1000 может быть осуществлено с использованием одной или более специализированных интегральных схем (ASIC), процессоров цифрового сигнала (DSP), устройств обработки цифровых сигналов (DSPD), программируемых логических устройств (PLD), программируемых матриц логических элементов (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, чтобы выполнять вышеописанные способы.
[0260] В примерах осуществления также предложен машиночитаемый носитель данных, включающий команды, такие как содержащиеся в памяти 1004, выполняемые процессором 1018 в устройстве 1000, чтобы осуществить вышеописанный способ уборки мусора. Например, машиночитаемый носитель данных может быть памятью ROM, памятью произвольного доступа (RAM), постоянным запоминающим устройством в виде компакт-диска (CD-ROM), магнитной лентой, гибким диском, оптическим устройством хранения данных и т.п.
[0261] Фиг. 11 является блок-схемой, поясняющей устройство для уборки мусора 1100 согласно примеру осуществления изобретения. Например, устройство 1100 может быть роботом для подметания, роботом для чистки шваброй и т.п.
[0262] Как показано на фиг. 11, устройство 1100 может включать один или более компонент из следующих: блок 1102 обработки, память 1104, блок 1106 питания, узел 1108 движения, узел 1110 уборки и коммуникационный блок 1116.
[0263] Блок 1102 обработки обычно управляет всеми операциями устройства 1100, включая такие операции как разрешение адреса, прием данных, управление трафиком передачи и т.п. Блок 1102 обработки может включать один или более процессор 1118, чтобы исполнять команды для выполнения всех или части шагов в вышеописанных способах. Кроме того, блок 1102 обработки может включать один или более модуль, которые обеспечивают взаимодействие между блоком 1102 обработки и другими компонентами.
[0264] Память 1104 конфигурируется, чтобы хранить различные типы данных для поддержки операций устройства 1100. Примеры таких данных включают команды для выполнения любого приложения или способа в устройстве 1100, пользовательские данные и т.п. Память 1104 может быть реализована с использованием любого типа энергозависимых или энергонезависимых устройств памяти, или их комбинации, таких как статическая память произвольного доступа (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитная память, флэш-память, магнитный или оптический диск. Память 1104 также хранит один или более модулей, которые конфигурированы для исполнения на одном или более процессорах 1118, чтобы осуществить все или часть шагов в вышеописанном способе уборки мусора.
[0265] Блок 1106 питания подает питание к различным узлам устройства 1100. Блок 1106 питания может включать систему управления электропитанием, один или более источников питания и другие компоненты, связанные с генерацией, управлением и распределением мощности питания в устройстве 1100.
[0266] Узел 1108 движения является механическим устройством для перемещения устройства 1100. Узел 1108 движения может быть колесом, гусеницей или механической ногой.
[0267] Узел 1110 уборки является механическим устройством для уборки мусора. Узел 1110 уборки может быть вакуумным узлом уборки, узлом подметания или узлом чистки шваброй.
[0268] Коммуникационный блок 1116 конфигурируется, чтобы обеспечить проводную или беспроводную связь между устройством 1100 и другими устройствами. Устройство 1100 может установить беспроводную сеть связи, основанную на стандарте, например, сеть Wi-Fi. В примере осуществления коммуникационный блок 1116 передает вещательный сигнал или передает в вещательном режиме соответствующую информацию через канал вещания.
[0269] В примерах осуществления устройство 1100 может быть осуществлено с использованием одной или более специализированных интегральных схем (ASIC), процессоров цифрового сигнала (DSP), устройств обработки цифровых сигналов (DSPD), программируемых логических устройств (PLD), программируемых матриц логических элементов (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, чтобы выполнять вышеописанные способы.
[0270] В примерах осуществления также предложен машиночитаемый носитель данных, включающий команды, такие как содержащиеся в памяти 1104, выполняемые процессором 1118 в устройстве 1100, чтобы осуществить вышеописанный способ уборки мусора. Например, машиночитаемый носитель данных может быть памятью ROM, памятью произвольного доступа (RAM), постоянным запоминающим устройством в виде компакт-диска (CD-ROM), магнитной лентой, гибким диском, оптическим устройством хранения данных и т.п.
[0271] Другие варианты осуществления изобретения будут очевидны для специалистов из данного описания и из практического использования раскрытого здесь изобретения. Эта заявка предназначена для охвата любых вариаций, использований или адаптаций настоящего изобретения в соответствии с его общими принципами, включая такие отклонения от представленного раскрытия, которые находятся в рамках общих знаний или общепринятых технических средств в данной области. Предполагается, что описание и варианты осуществления представляют собой только примеры, а действительный объем изобретения и его сущность определены приложенной формулой изобретения.
[0272] Очевидно, что изобретение не ограничено точной конструкцией, которая была описана выше и пояснялась на сопровождающих чертежах, и что различные модификации и изменения могут быть сделаны без выхода за рамки изобретения. Объем изобретения определяется только приложенной формулой изобретения.
Способ и устройство для корректировки цвета кожи
Способ, аппарат и устройство для сегментации изображения
Способ и мобильный терминал для реализации будильника в выключенном состоянии
Способ и устройство для идентификации телефонного вызова
Способ и устройство для привязки ключа токена к учетной записи
Способ и аппарат для управления интеллектуальным освещением
Способ, устройство и терминал для настройки виджета
Способ предоставления видео в режиме реального времени и устройство для его осуществления, а также сервер и терминальное устройство
Способ и устройство подсказки для выбора места в зале
Способ и устройство для увеличения отображаемого шрифта
Способ и устройство для корректировки цвета кожи
Способ, аппарат и устройство для сегментации изображения
Способ и мобильный терминал для реализации будильника в выключенном состоянии
Способ и устройство для идентификации телефонного вызова
Способ и устройство для привязки ключа токена к учетной записи
Способ и аппарат для управления интеллектуальным освещением
Способ, устройство и терминал для настройки виджета
Способ предоставления видео в режиме реального времени и устройство для его осуществления, а также сервер и терминальное устройство
Способ и устройство подсказки для выбора места в зале
Способ и устройство для увеличения отображаемого шрифта

