Результат интеллектуальной деятельности: Способ помощи в навигации для уточнения траектории летательного аппарата
Вид РИД
Изобретение
Изобретение относится к области авиации, а именно к области способов помощи в навигации для уточнения траектории летательного аппарата. Изобретение предназначено для применения в области авиационного приборостроения в пилотажно-навигационном оборудовании летательных аппаратов (ЛА).
Способ помощи в навигации заключается в уточнении углов пространственного положения ЛА после отделения его от носителя с целью исключения отклонения управляемого автономного ЛА от заданной траектории. По причине воздействия вихревых потоков, создаваемых носителем, неравномерного срабатывания замков подвеса и из-за воздействия набегающего потока на несимметричную аэродинамику отделяемый ЛА может получить большие крутящие моменты. Как показывает практика, угловая скорость вращения может превысить максимальный порог измерения датчиков угловых скоростей (ДУС). В результате чего, после остановки вращения стабилизированный угол крена может отличаться от нуля на десятки градусов, что приводит к сильному отклонению ЛА от заданной траектории. Актуальной задачей является повышение точности управления за счет автономного уточнения угла крена после устранения вращения ЛА. Во многих ЛА используются инерциальные системы управления, а спутниковые корректоры отсутствуют. Даже при наличии спутниковых приемников относительно большое время захвата сигналов от спутников или помехи не позволяют их использовать на начальном этапе полета. Случай, приведенный выше, имеет вероятностный характер и используется единожды после отделения носимого ЛА от носителя. По этой причине установка на ЛА нескольких ДУС с разными диапазонами измерений сопряжена с необходимостью значительных финансовых затрат и в ряде случаев нецелесообразна.
Существует способ помощи в навигации для определения траектории летательного аппарата, патент №RU 2523183, МКП G08G 5/02, G05D 1/06, приоритет от 28.04.2009 г. FR 09/02066, опубликован 20.07.2014 г, бюл. №20.
Способ помощи в навигации заключается в определении будущей траектории захода на посадку с помощью произведения оценки прогнозируемых безопасных радиусов на будущей траектории, основанной на вычислении предельного момента, начиная с которого прогнозируемый безопасный радиус превышает или равен пределу выдачи тревожного сигнала и вычисления предельного момента ухода, который соответствует максимальному моменту, в который летательный аппарат должен покинуть заранее определенную траекторию, по которой он двигался, чтобы иметь возможность выйти на безопасную высоту.
В приведенном выше способе отсутствует режим автономной коррекции углов ориентации бесплатформенной инерциальной навигационной системы (БИНС) при потере сигнала от спутниковых систем коррекции, что может привести к отклонению ЛА от заданной траектории, за счет снижения точности.
Целью данного изобретения является повышение точности формирования текущей траектории ЛА путем автономной коррекции угла крена.
Поставленная цель достигается за счет того, что согласно заявляемому способу помощи в навигации для уточнения траектории летательного аппарата, осуществляют начальную выставку БИНС, счисление углов пространственной ориентации, скоростей, координат ЛА и формирование текущей траектории полета, дополнительно осуществляют уточнение текущего значения угла крена, для чего выполняют проверку выхода ωx за ограничение пределов измерений датчика ДУС, если модуль ωx превысил ограничение, устанавливают признак  , вычисляют мгновенное значение статической оценки крена
, вычисляют мгновенное значение статической оценки крена  , где: nz - показания акселерометра по оси z, ϑ - текущее значение тангажа, вычисляют скользящее среднее статической оценки крена
, где: nz - показания акселерометра по оси z, ϑ - текущее значение тангажа, вычисляют скользящее среднее статической оценки крена  и скользящее СКО крена σ(γ), выполняют сдвиг буфера для скользящего СКО крена σ(γ) и буфера для скользящего среднего статической оценки крена
и скользящее СКО крена σ(γ), выполняют сдвиг буфера для скользящего СКО крена σ(γ) и буфера для скользящего среднего статической оценки крена  , на массивах этих буферов вычисляют скользящее СКО крена σ(γ) и скользящее среднее статической оценки крена
, на массивах этих буферов вычисляют скользящее СКО крена σ(γ) и скользящее среднее статической оценки крена  , если скользящее СКО крена σ(γ) меньше порога «П», и текущее время от момента команды на отделение больше tl, тогда устанавливают признак обнаружения «площадки» крена γi=1; запоминают номер отсчета обнаружения «площадки» крена
, если скользящее СКО крена σ(γ) меньше порога «П», и текущее время от момента команды на отделение больше tl, тогда устанавливают признак обнаружения «площадки» крена γi=1; запоминают номер отсчета обнаружения «площадки» крена  ; запоминают корректирующее значение крена
; запоминают корректирующее значение крена  равное скользящему среднему статической оценки крена
равное скользящему среднему статической оценки крена  на момент обнаружения «площадки», если скользящее СКО крена σ(γ) меньше порога «П», и номер текущего отсчета равен
на момент обнаружения «площадки», если скользящее СКО крена σ(γ) меньше порога «П», и номер текущего отсчета равен  , и признак выхода на ограничение установлен в единицу
, и признак выхода на ограничение установлен в единицу  , тогда в алгоритме ориентации СПО изделия выполняют замену текущей оценки крена ЛА γ на корректирующее значение
, тогда в алгоритме ориентации СПО изделия выполняют замену текущей оценки крена ЛА γ на корректирующее значение  .
.
Суть способа помощи в навигации для уточнения траектории летательного аппарата излагается ниже.
Коррекцию выполняют при стабилизации изделия в положении близкому к невозмущенному полету, после отделения от носителя.
Момент коррекции определяют по СКО оценки крена на скользящем интервале наблюдения с заданной длительностью.
По истечении tl после отделения, и при условии того, что СКО оценки крена на скользящем интервале меньше «П», корректирующее значение определяют соотношением:

Черта сверху означает усреднение на скользящем интервале.
Учитывают интервал времени, на котором происходит интенсивное вращение изделия после его отделения от носителя. Для этого задают время tl, отсчитываемое от момента команды на отделение изделия, в течение которого происходит основное вращение изделия:
- в течение tl определяют наличие выхода ωx на ограничение;
- по истечении tl находят «площадку» крена, на которой он достаточно стабилен для использования статической оценки крена  ;
;
- поскольку поиск «площадки» необходимо выполнять в процессе счисления ориентации, то данный алгоритм коррекции должен быть включен в «Быстрый цикл» решения навигационного алгоритма БИНС по Δt.
Момент обнаружения «площадки» крена фиксируют по величине скользящего СКО крена - σ(γ), которое вычисляют на скользящем интервале длиной в 1 секунду. Момент обнаружения «площадки» заранее не определен, и может варьироваться в зависимости от продолжительности и интенсивности вращения, но этот момент всегда больше tl.
Конкретное значение момента времени обнаружения «площадки» фиксируют в виде номера отсчета измерений от команды на отделение  до убывания скользящего СКО крена σ(γ) ниже заданного порога «П».
до убывания скользящего СКО крена σ(γ) ниже заданного порога «П».
Обнаружение «площадки» свидетельствует о достаточно стабильном положении изделия по крену, при этом само значение крена может быть различным, в зависимости от того, насколько удачно оно стабилизировалось в данном полете.
Параллельно с вычислением скользящего СКО крена σ(γ) вычисляют скользящее среднее статической оценки крена  . Для этого мгновенные значения статической оценки крена
. Для этого мгновенные значения статической оценки крена  усредняют на текущем положении скользящего интервала.
усредняют на текущем положении скользящего интервала.
Для коррекции используют скользящее среднее статической оценки крена  на отсчете
на отсчете  момента обнаружения «площадки», которое обозначают как
момента обнаружения «площадки», которое обозначают как  .
.
Заметим, что успех использования формулы  обеспечивается только совместно с правильным обнаружением «площадки» и при усреднении мгновенных статических оценок на заданном интервале.
обеспечивается только совместно с правильным обнаружением «площадки» и при усреднении мгновенных статических оценок на заданном интервале.
По мере решения шагов Δt, как только скользящее СКО крена σ(γ) становится меньше порога «П» фиксируют корректирующее значение крена  , которое присваивают текущей оценке крена γ в алгоритме ориентации БИНС при условии, что за время tl был зафиксирован выход ωx на ограничение.
, которое присваивают текущей оценке крена γ в алгоритме ориентации БИНС при условии, что за время tl был зафиксирован выход ωx на ограничение.
Таким образом, коррекцию выполняют на «площадке» установившегося углового положения по крену. Само угловое положение по крену при этом может быть произвольным. Важно, что определяют момент времени обнаружения «площадки» по скользящему СКО крена - σ(γ), где γ - оценка крена, вычисляемая в СПО изделия. «Площадка» характеризуется тремя величинами:
- номером отсчета ее обнаружения -  ;
;
- величиной скользящего СКО крена - σ(γ) < «П»;
- величиной скользящего среднего статической оценки крена на момент обнаружения «площадки» -  .
.
Коррекция крена заключается в присваивании оценке крена в алгоритме ориентации значения  при условии, что в течение tl имел место выход угловой скорости ωx на ограничение.
при условии, что в течение tl имел место выход угловой скорости ωx на ограничение.
Если же «площадка» крена не обнаруживается, то это означает, что изделие постоянно вращается и коррекция крена по ДЛУ невозможна.
Данный способ коррекции включают в общий цикл шагов «Быстрого цикла» БИНС по Δt.
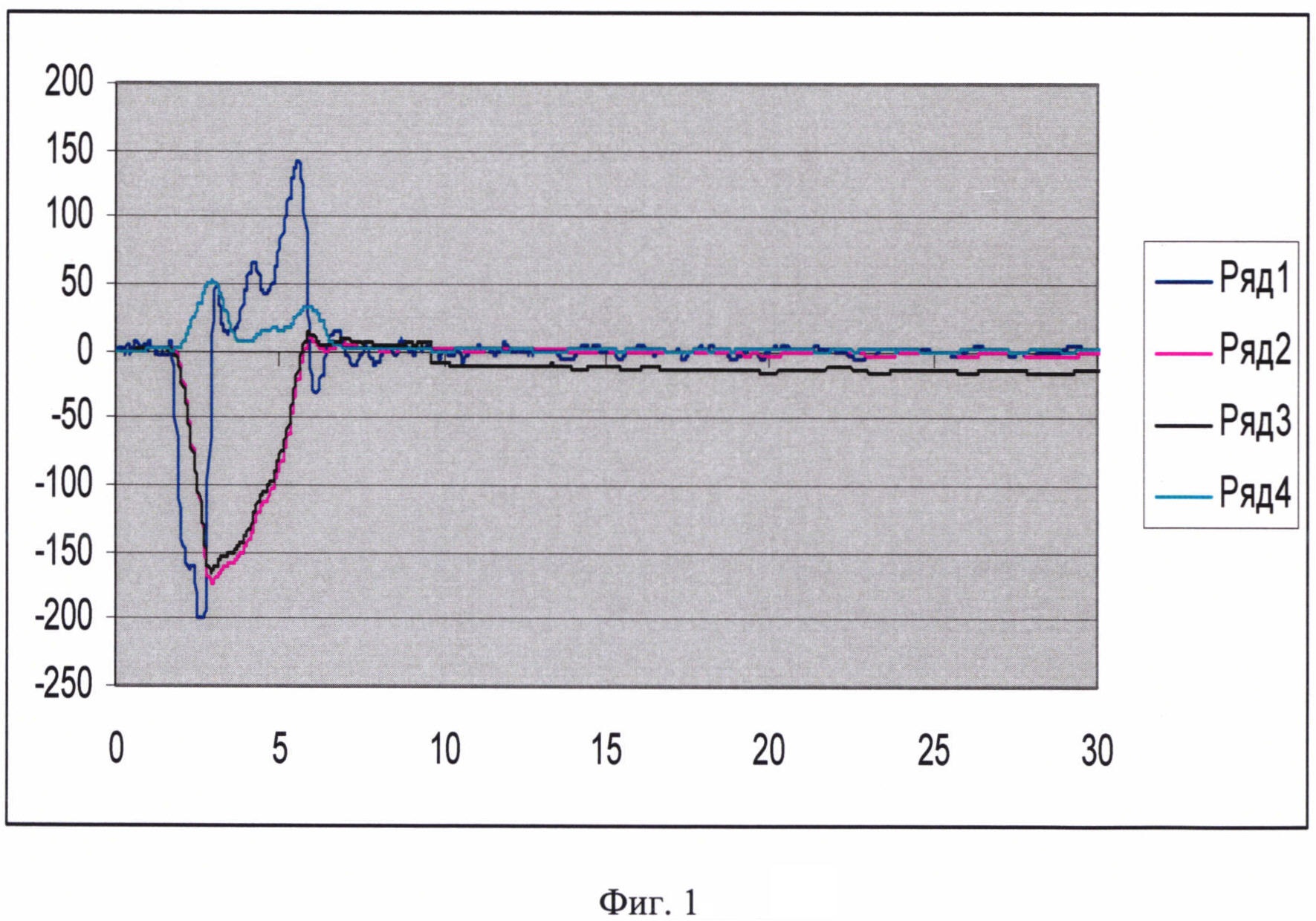
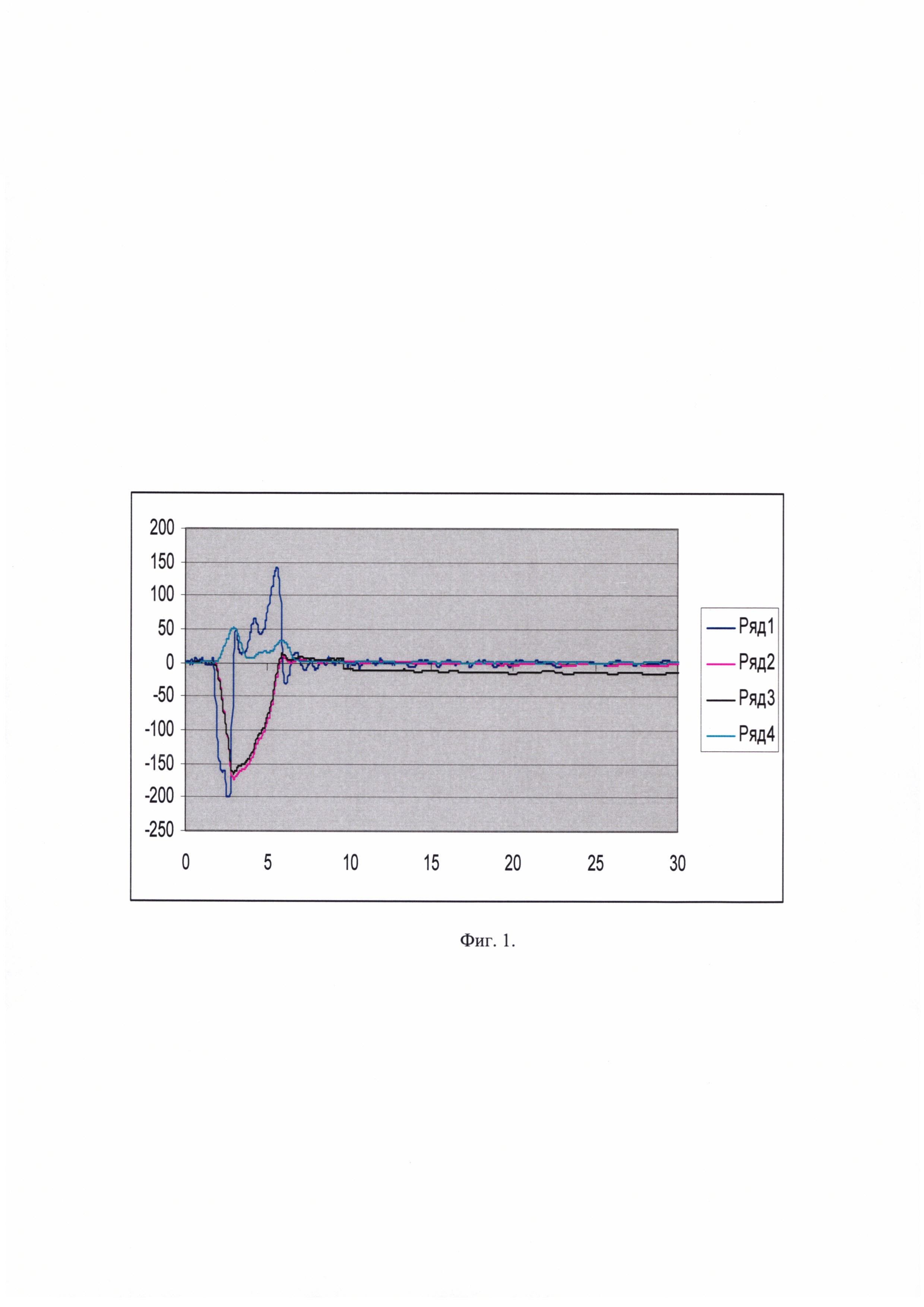
Результаты моделирования коррекции угла крена при выходе ωx на «площадку» представлены на фиг. 1, где: ряд 1 - угловая скорость ωx; ряд 2 - оценка крена по СПО изделия; ряд 3 - оценка крена, вычисленная по данным мультиплексного канала информационного обмена (МКИО) с учетом коррекции; ряд 4 - СКО оценки крена по СПО изделия на скользящем интервале.
По истечении 5 секунд СКО оценки крена убывает и в момент времени 9,6 секунды становится меньше 0,5 градуса. Корректирующее значение, вычисленное по (1) равно - 8,88 градуса. Без коррекции оценка крена в этот момент равна 2,60 градуса. Коррекция компенсирует ограничение отрицательной полуволны угловой скорости ωx.
Заявляемый способ помощи в навигации для уточнения траектории летательного аппарата может быть использован как на высокоманевренных, так и на маломаневренных ЛА.
Техническим результатом является уточнение траектории автономно управляемого ЛА путем определения его угла крена после отделения от носителя, используя сигналы своих же бортовых инерциальных датчиков.
Способ помощи в навигации для уточнения траектории летательного аппарата (ЛА), включающий начальную выставку БИНС, счисление углов пространственной ориентации, скоростей, координат ЛА и формирование текущей траектории полета, отличающийся тем, что дополнительно осуществляют уточнение текущего значения угла крена, для чего выполняют проверку выхода угловой скорости относительно продольной оси (ω) за ограничение пределов измерений датчика ДУС, если модуль ω превысил ограничение, устанавливают признак вычисляют мгновенное значение статической оценки крена где: n - показания акселерометра по оси z, ϑ - текущее значение тангажа, вычисляют скользящее среднее статической оценки крена и скользящее СКО крена σ(γ), выполняют сдвиг буфера для скользящего СКО крена σ(γ) и буфера для скользящего среднего статической оценки крена на массивах этих буферов вычисляют скользящее СКО крена σ(γ) и скользящее среднее статической оценки крена если скользящее СКО крена σ(γ) меньше порога «П», и текущее время от момента команды на отделение больше t1, тогда устанавливают признак обнаружения «площадки» крена γ=1; запоминают номер отсчета обнаружения «площадки» крена запоминают корректирующее значение крена , равное скользящему среднему статической оценки крена на момент обнаружения «площадки», если скользящее СКО крена σ(γ) меньше порога «П», и номер текущего отсчета равен и признак выхода на ограничение установлен в единицу тогда в алгоритме ориентации СПО изделия выполняют замену текущей оценки крена ЛА γ на корректирующее значение





Способ идентификации нелинейных систем
Гибридный способ измерения углового положения
Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков дус
Способ повышения точности калибровки блока микромеханических датчиков угловой скорости
Гибридный датчик измерения углового положения
Способ коррекции углов ориентации бинс
Способ коррекции бесплатформенной инерциальной навигационной системы
Комплексный способ навигации летательных аппаратов
Адаптивная бесплатформенная инерциальная курсовертикаль
Способ определения коэффициентов калибровки интегрированного блока датчиков
Способ определения углов ориентации ла на вертикальных траекториях полета
Электромеханический привод поступательного действия
Способ контроля исправности интегрированных блоков датчиков
Боковая ручка управления (варианты)
Способ оценки маловысотного контура управления ла
Способ построения маршрута маловысотного полета на виртуальном полигоне

