Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗНАЧЕНИЯ ЗАВИСИМОГО ОТ ДВИЖЕНИЯ ПАРАМЕТРА
Вид РИД
Изобретение
Изобретение относится к способу и устройству для определения значения зависимого от движения параметра.
Для устройств, таких как, например, блоки оплаты дорожных сборов или тахографы, требуется сигнал местоположения или сигнал скорости. Этот сигнал часто обеспечивается с помощью нескольких датчиков. Сигналы датчиков сравниваются друг с другом, чтобы, при необходимости, обеспечить лучшее значение местоположения или значение скорости.
DE 102007059785 A1 раскрывает устройство для проверки достоверности значения зависимого от движения параметра, которое имеет датчик угла поворота для определения значения зависимого от движения параметра и инерциальный датчик, причем сигнал инерциального датчика сравнивается с цифровым сигналом датчика угла поворота.
WO 2009/043794 A1 раскрывает тахограф и бортовой блок оплаты дорожных сборов, каждый из которых содержит соответствующий интерфейс данных. Тахограф и бортовой блок оплаты дорожных сборов выполнены, каждый, как передатчики данных, предназначенные для определения криптографического контрольного значения в зависимости от полезных данных, которые должны передаваться через интерфейс данных к соответствующему партнеру по связи, и для передачи криптографического контрольного значения. Они также выполнены как приемники для приема полезных данных и соотнесенного с ними криптографического контрольного значения.
Задача, лежащая в основе изобретения, заключается в создании способа и соответствующего устройства для определения значения зависимого от движения параметра.
Эта задача решается с помощью признаков независимых пунктов формулы изобретения. Предпочтительные варианты осуществления охарактеризованы в зависимых пунктах формулы изобретения.
Изобретение характеризуется способом или соответствующим устройством для определения значения зависимого от движения параметра. Предоставляется первое измеренное значение, которое представляет зависимый от движения параметр. Кроме того, предоставляется по меньшей мере одно второе независимое измеренное значение, которое представляет зависимый от движения параметр. С каждым измеренным значением соотносится доверительное значение, которое является репрезентативным для вероятности манипулирования соответствующим измеренным значением. В зависимости от первого и по меньшей мере одного второго измеренного значения и соответствующего им доверительного значения определяется значение зависимого от движения параметра.
С учетом соответствующего доверительного значения при определении значения зависимого от движения параметра, значение зависимого от движения параметра, при обстоятельствах, может определяться более точно и, при необходимости, более надежно. Значение зависимого от движения параметра может представлять собой, например, значение местоположения для блока оплаты дорожных сборов и/или значение скорости для тахографа.
В соответствии с предпочтительным вариантом осуществления, с каждым измеренным значением соотносится значение точности, которое является характерным для точности соответствующего измеренного значения. В зависимости от соответствующего значения точности определяется значение зависимого от движения параметра. За счет того что при определении значения зависимого от движения параметра дополнительно используется значение точности измеренного значения, значение зависимого от движения параметра может быть определено еще более точно.
В соответствии с другим предпочтительным вариантом осуществления, измеренные значения взвешиваются соответствующим доверительным значением и/или соответствующим значением точности. За счет взвешивания, значение зависимого от движения параметра может определяться при невысоких вычислительных затратах.
В соответствии с другим предпочтительным вариантом осуществления, соответствующее доверительное значение определяется в зависимости от самодиагностики соответствующего датчика, который предоставляет соответствующее измеренное значение. За счет того, что соответствующий датчик выполняет самодиагностику, датчик может обнаруживать помехи. За счет этого доверительное значение может затем соответствующим образом корректироваться в зависимости от самодиагностики.
Согласно еще одному предпочтительному варианту осуществления, в зависимости от сравнения соответствующего доверительного значения и/или соответствующего значения точности с пороговым значением, для определения значения зависимого от движения параметра учитывается или отбрасывается соответствующее измеренное значение. Таким образом, в случае необходимости, при определении значения зависимого от движения параметра может быть достигнута более высокая точность.
В соответствии с другим предпочтительным вариантом осуществления, в зависимости от значения зависимого от движения параметра, определяется значение второго зависимого от движения параметра. Так, например, в дополнение к значению местоположения, можно определить значение скорости или, в дополнение к значению скорости, можно определить значение местоположения.
В соответствии с другим предпочтительным вариантом осуществления, по меньшей мере одно из измеренных значений определяется на основе спутникового принципа измерений. За счет измерения с использованием спутникового принципа измерения, местоположение может определяться быстро и относительно точно.
Согласно еще одному предпочтительному варианту осуществления, по меньшей мере одно из измеренных значений определяется с использованием выделенной связи ближнего действия (Dedicated Short Range Communication - DSRC). Так как, например, многие системы оплаты дорожных сборов реализованы посредством DSRC, при необходимости, может быть легко реализовано определение измеренного значения с помощью DSRC.
В соответствии с другим предпочтительным вариантом осуществления, значение зависимого от движения параметра определяется в зависимости от калмановской фильтрации. Посредством калмановской фильтрации возможно, например, быстрое определение значения зависимого от движения параметра.
В соответствии с другим предпочтительным вариантом осуществления, измеренные значения и/или доверительные значения и/или значения точности и/или значение зависимого от движения параметра и/или значение второго зависимого от движения параметра сохраняются на продолжительный период. За счет сохранения на продолжительный период обеспечивается возможность того, что данные могут считываться позже и, при необходимости, оцениваться.
В соответствии с другим предпочтительным вариантом осуществления, измеренные значения и/или доверительные значения и/или значения точности и/или значение зависимого от движения параметра и/или значение второго зависимого от движения параметра передаются в систему фоновой обработки. За счет передачи можно, например, в системе фоновой обработки оценивать данные и, при обстоятельствах, выявлять манипуляции.
Примеры выполнения изобретения описаны ниже более подробно со ссылками на чертежи, на которых представлено:
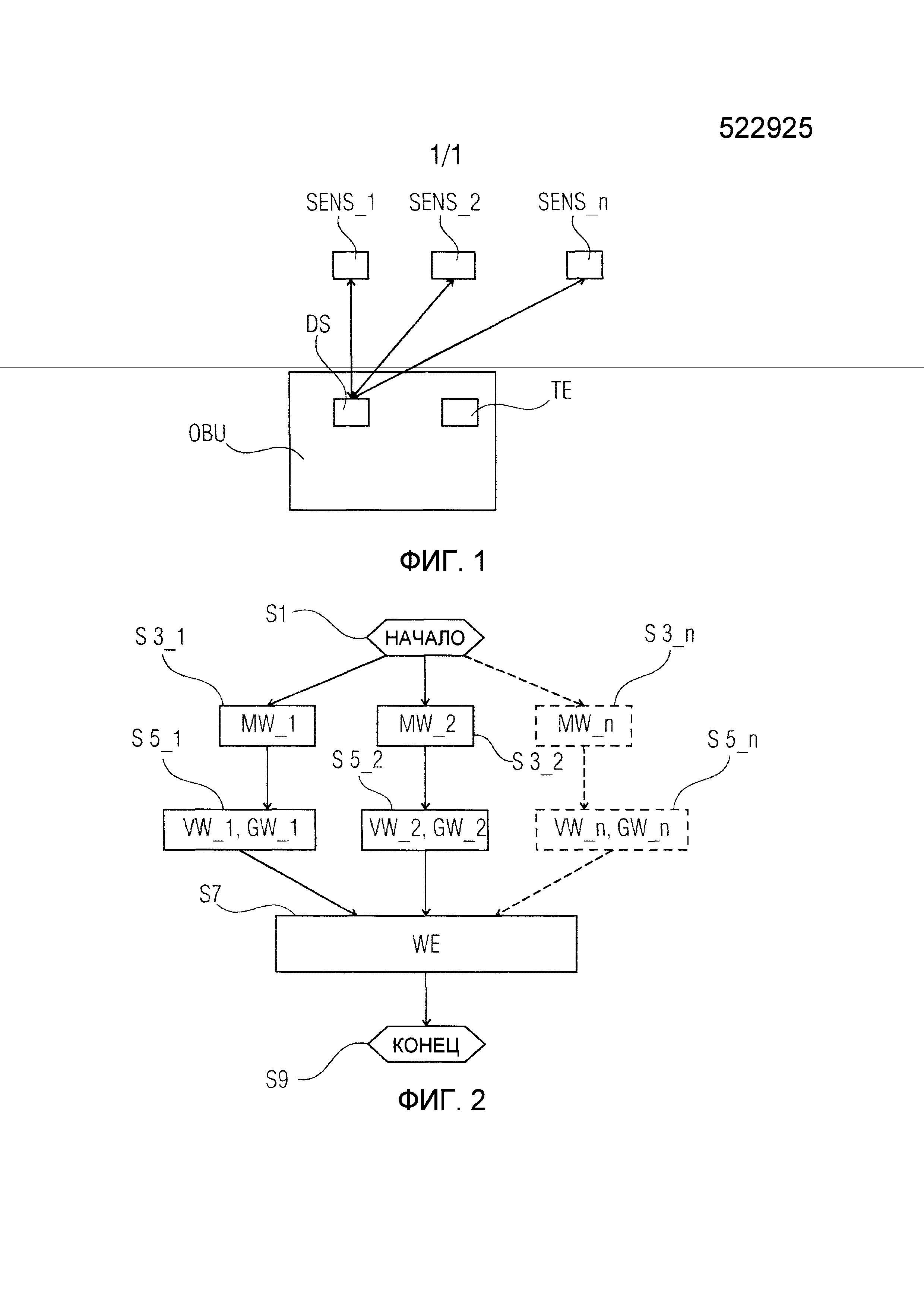
Фиг. 1 - устройство для определения значения зависимого от движения параметра и
Фиг. 2 - блок-схема способа для определения значения зависимого от движения параметра.
Элементы одинаковой конструкции или функции на чертежах обозначены одинаковыми ссылочными позициями. Устройство OBU (фиг. 1) для определения значения зависимого от движения параметра WE предпочтительно расположено в блоке оплаты дорожных сборов или тахографе автомобиля.
Устройство OBU защищено, например, посредством защищенной загрузки (Secure Boot) и/или других методов защиты. Устройство OBU имеет по меньшей мере один интерфейс DS данных, который, например, защищен посредством доверительных элементов. Интерфейс данных может принимать измеренные значения MW_1-MW_n, которые предоставляются несколькими датчиками SENS_1, SENS_2, SENS_n и/или другими измерительными приборами. Устройство OBU может иметь датчики SENS_1, SENS_2, SENS_n или частичное количество датчиков SENS_1, SENS_2, SENS_n. Датчики SENS_1, SENS_2, SENS_n также могут быть расположены вне устройства OBU. Они предназначены для того, чтобы предоставлять измеренное значение MW_n, которое представляет зависимый от движения параметр, например, значение местоположения или значение скорости.
Измеренное значение MW_n может определяться, например, в зависимости от спутникового принципа измерения, например, GPS, Galileo или GLONASS. Альтернативно или дополнительно, оно может определяться, например, сотовыми информациями сетей мобильной радиосвязи, таких как GSM, UMTS или LTE. Альтернативно или дополнительно, оно может быть определено в зависимости от выделенной связи ближнего действия (Dedicated Short Range Communication - DSRC). Альтернативно или дополнительно, оно может быть определено в зависимости от сотовых информаций от WLAN или Bluetooth сетей или других сетей радиосвязи. Альтернативно или дополнительно, оно может определяться в зависимости от комбинации предыдущих значений зависимого от движения параметра и/или датчиков транспортного средства, таких как, например, датчики скорости, датчики ускорения, гироскопы, датчики скорости вращения, датчики компаса, и/или информаций о состоянии транспортного средства, таких как ABS- или ESP-информации и/или другие датчики, которые хорошо известны специалистам в данной области техники для этой цели.
Устройство OBU также включает в себя блок TE тахографа. При этом как блок оплаты дорожных сборов, так и тахограф, могут быть реализованы в одном устройстве.
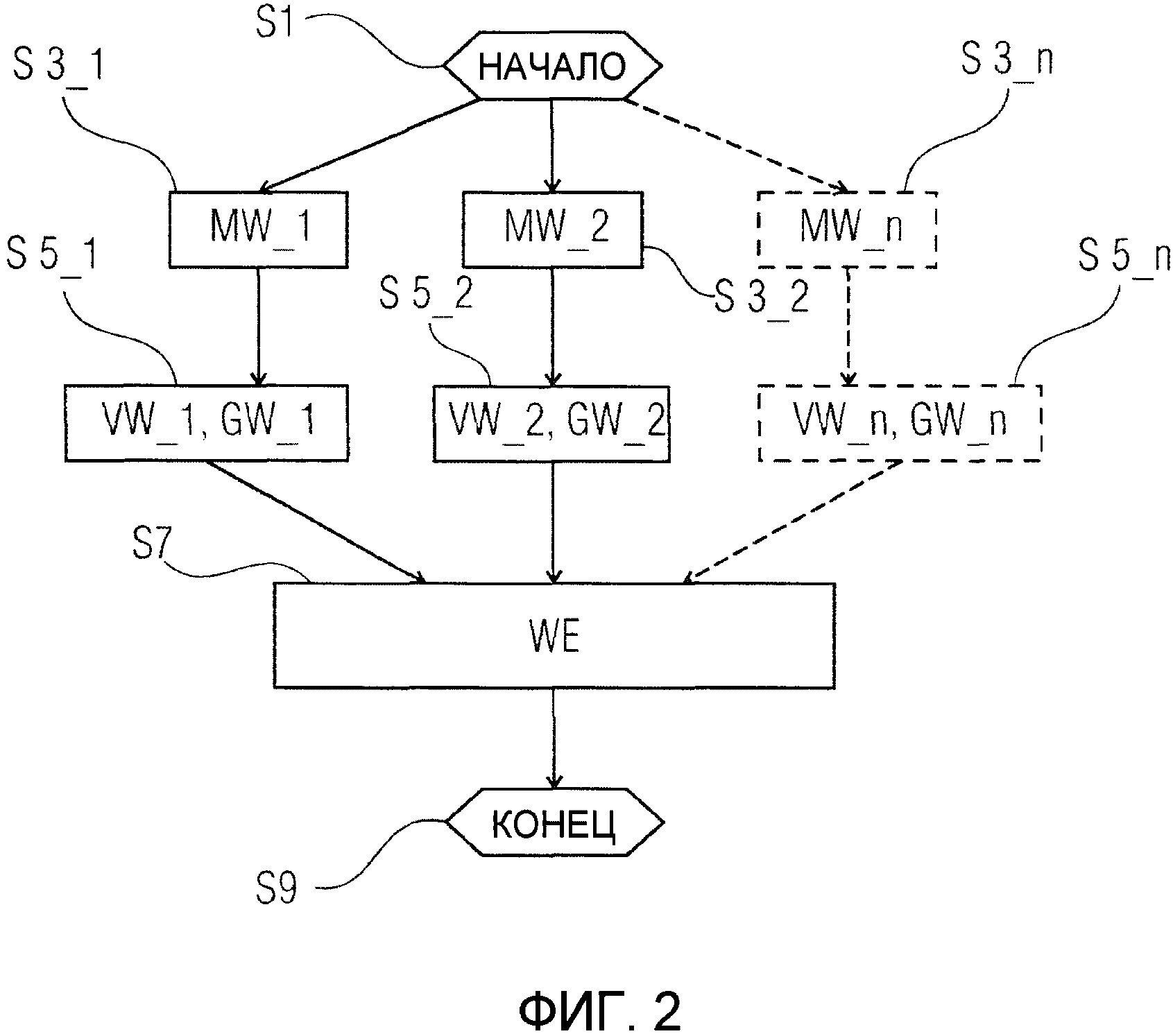
Программа, которая обрабатывается в устройстве OBU, запускается на этапе S1 (фиг. 2), на котором, при необходимости, могут быть инициализированы переменные.
На этапах от S3_1 до S3_n соответствующее измеренное значение MW_n предоставляется датчиками от SENS_1 до SENS_n и/или другими измерительными приборами, которое представляет значение зависимого от движения параметра, как, например, значение местоположения или значение скорости. Измеренное значение MW_n может дополнительно иметь, например, временную метку.
На этапах от S5_1 до S5_n с соответствующим измеренным значением MW_n соотносится доверительное значение VW_n. Доверительное значение VW_n является репрезентативным для вероятности манипулирования соответствующим измеренным значением MW_n. Доверительное значение VW_n может быть задано для соответствующего способа измерений измеренного значения MW_n, альтернативно или дополнительно, оно может быть определено переменным. Кроме того, соответствующее значение GW_n точности соотносится с измеренным значением MW_n, которое является характерным для точности соответствующего измеренного значения MW_n. Значение GW_n точности может быть заданным или, альтернативно или дополнительно, определяется как переменное.
В случае спутникового принципа измерения, доверительное значение VW_n может, например, быть определено в зависимости от числа применяемых систем, таких как GPS и/или Galileo и/или GLONASS, потому что при использовании более одной системы, манипулирование, при обстоятельствах, осуществить труднее, и поэтому вероятность манипулирования уменьшается. Доверительное значение VW_n, альтернативно или дополнительно, может быть определено в зависимости от применения услуг подписки, таких как, например, в Galileo, Коммерческая служба (CS) и/или Защищенная служба (SOL) и/или Регулируемая служба (PRS). Доверительное значение VW_n может, например, альтернативно или дополнительно, быть определено в зависимости от самодиагностики соответствующего датчика SENS_n или соответствующего измерительного прибора. Таким образом, в зависимости от самодиагностики, может, например, обнаруживаться помеха сигнала, например, путем обнаружения помех (Jamming Detection), при этом контролируются соответствующие радиочастоты, и, в зависимости от отклонений в частотах радиосвязи, делается вывод о наличии помехи.
Значение GW_n точности может быть определено, например, в зависимости от числа используемых систем, так как, при обстоятельствах, точность измеренного значения повышается при использовании более чем одной системы.
Если измеренное значение MW_n определяется в зависимости от информаций мобильной радиосвязи, например, с использованием сотовой информации сети мобильной радиосвязи, то можно, например, доверительное значение VW_n определять, например, в зависимости от оценки множества сотовых информаций в одно и то же время, при обстоятельствах, с учетом уровня сигнала. Доверительное значение VW_n может, альтернативно или дополнительно, определяться в зависимости от применения зашифрованных или снабженных подписью соединений. Значение GW_n точности может определяться, например, в зависимости от сотовых информаций, таких как размер соты радиосвязи. Значение GW_n точности, альтернативно или дополнительно, может определяться в зависимости от применения дополнительных служб определения местоположения сети мобильной радиосвязи, таких как, например, A-GPS и/или других служб геолокации.
Если измеренное значение MW_n определяется в зависимости от выделенной связи ближнего действия (Dedicated Short Range Communication - DSRC), то доверительное значение VW_n может определяться, например, в зависимости от сообщения с коррекцией местоположения (Localisation Augmentation Communication - LAC). Альтернативно или дополнительно, оно может определяться в зависимости от проверки идентификаторов (ID) радиомаяков.
Если измеренное значение MW_n определяется в зависимости от радиосети, такой как WLAN или Bluetooth сети, то доверительное значение VW_n может определяться, например, в зависимости от согласованности информаций доступных сот, например, соответствующих МАС-адресов, с базами данных. Альтернативно или дополнительно, доверительное значение VW_n может определяться в зависимости от применения дополнительных, релевантных для местоположения информаций радиосетей.
Измеренное значение MW_n может определяться, альтернативно или дополнительно, в зависимости от комбинации предшествующих значений зависимого от движения параметра и/или датчиков транспортного средства и/или информаций состояния транспортного средства. Так, например, доверительное значение VW_n может определяться в зависимости от значений датчиков ускорения, гироскопов, датчиков компаса или других датчиков, так как посредством этих датчиков может контролироваться вероятность манипулирования. Также значение GW_n точности может быть определено в зависимости от этих датчиков, так как, при известных условиях, за счет применения нескольких датчиков повышается точность.
На этапе S7, в зависимости от предоставленных измеренных значений MW_1-MW_n и соответствующего им доверительного значения VW_n и/или значения GW_n точности, определяется значение зависимого от движения параметра. Например, измеренные значения MW_1-MW_n взвешиваются соответствующим доверительным значением VW_n и/или соответствующим значением GW_n точности. Альтернативно или дополнительно, значение зависимого от движения параметра WE может быть определено в зависимости от калмановской фильтрации. Оно может быть определено, альтернативно или дополнительно, в зависимости от счисления координат или одометрии, то есть так называемого Dead Reckoning (счисления пути). Альтернативно или дополнительно, оно может быть определено с помощью нейронных сетей. Для определения значения зависимого от движения параметра WE дополнительно может совместно использоваться предыдущее значение зависимого параметра или предыдущие значения зависимого от движения параметра.
На этапе S9 программа будет завершена и, в случае необходимости, может снова запускаться на этапе S1.
После определения значения зависимого от движения параметра WE также может определяться значение второго зависимого от движения параметра в зависимости от значения первого зависимого от движения параметра WE. Например, в зависимости от значения местоположения может определяться значение скорости. Это может производиться, например, путем получения производной от значения местоположения. Так, можно, например, в дополнение к блоку оплаты дорожных сборов, реализовать тахограф.
Кроме того, измеренные значения MW_1-MW_n и/или доверительные значения VW_1-VW_n и/или значения GW_1-GW_n точности и/или значение зависимого от движения параметра WE и/или значение второго зависимого от движения параметра могут быть продолжительно сохранены. Например, эти данные могут быть сохранены на жестком диске и позже считаны, чтобы выполнить анализ. Например, может осуществляться распознавание манипуляций. Также возможно, что эти данные передаются в систему фоновой обработки. Это может, например, осуществляться всегда, или, например, только в случае, когда вероятно манипулирование, так как одно из доверительных значений VW_1-VW_n превышает заданное пороговое значение или спадает ниже его. Это позволяет, например, в системе фоновой обработки распознавать манипулирование.
Способ управления электронной схемой, включающей в себя устройство тепловой защиты, и соответствующая электронная схема
Многофункциональное устройство для отображения информации и для управления на автомобиле
Магнитный пассивный датчик положения
Подающий блок
Способ и устройство для безопасного хранения и для безопасного считывания полезных данных
Устройство обнаружения
Сигнализатор для датчика уровня топлива
Способ распознавания опрокидывания автотранспортного средства
Устройство с батареей

