Результат интеллектуальной деятельности: УСТРОЙСТВО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ ОТНОСИТЕЛЬНО ДРУГ ДРУГА
Вид РИД
Изобретение
Устройство контроля перемещения объектов относительно друг друга относится к контрольно-измерительной технике, в частности к способам контроля взаимного положения объектов (или отдельных частей одного объекта) оптико-электронными методами и может быть использовано для контроля взаимного положения объектов в пространстве, для линейного контроля взаимного положения элементов крупногабаритных сооружений, соосных деталей (например, турбоагрегатов АЭС, направляющих крупногабаритных станков и т.п.); а также может быть использован в автоматизированных системах для синхронизации выполнения технологических операций исполнительными звеньями механизмов.
Известно УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ СВЕТОВЫХ ОБЪЕКТОВ (см. патент №2273048). Оно используется для измерения координат световых объектов и получения траектории их движения. В нем проводится измерение полярных координат световых объектов, одновременно находящихся в поле зрения объектива, их яркости, поперечного размера изображения и удаления от оси в поле зрения каждого кадра. Устройство содержит передающую телевизионную трубку, блоки, формирующие спиральную развертку луча телевизионной трубки, и блок обработки сигналов, счетчик тактовых импульсов и счетчик видеоимпульсов, а также аналого-цифровой преобразователь и блок визуального наблюдения, сконструированные на основе пьезодефлекторов с оптическими отражателями на торце.
Недостатком его является то, что оно не обеспечивает требуемой точности при контроле расстояний между наблюдаемыми объектами, так как при снятии координат протяженных объектов и разной освещенности оценка расстояний зависит от условий проведения съемки.
Известно УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ СВЕТОВОГО ПЯТНА (см. патент №2097691). В условиях засветки в нем используется модуляция полезного сигнала при введении фильтра высоких частот, синхронного детектора и создании обратной связи, управляющей положением эквипотенциали мультискана, соответствующей центру светового пятна (сигнала). Это позволяет избавиться от влияния постоянных и медленно меняющихся засветок и производить координирование модулированного сигнала в широком диапазоне отношения мощности засветок к мощности сигнала.
Недостатком является то, что применение его для контроля расстояний между объектами осложняется тем, что изображения разных протяженных объектов могут искажаться от различного уровня засветок и иметь разные уровни освещенности, что будет приводить к большому разбросу результатов контроля.
Наиболее близким по технической сущности к заявленному объекту является УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА (см. патент №2456542).
Оно реализует алгоритм, который включает: формирование облученности в виде квазиточечных пятен рассеяния в плоскости изображения двух излучателей, преобразование оптического сигнала в электрический, измерение координат пятен рассеяния и определение величины смещения. Оптический сигнал в электрический преобразуют посредством ПЗС матрицы. По значениям координат энергетических центров тяжести первого и второго пятен рассеяния определяют расстояние между объектами и координаты середины отрезка между ними. Устройство содержит приемную систему, оптически сопряженную с излучателями, содержащую объектив и фотоприемное устройство, установленное в плоскости изображения объектива и выполненное в виде матричного фотоприемника, соединенного с блоком обработки, а также блок управления излучателями, содержащий два канала управления излучателями и микроконтроллер, выходы которого соединены с входами каждого из каналов управления излучателями, а вход микроконтроллера соединен с блоком обработки, при этом выходы каждого канала управления излучателями соединены с входами соответствующих излучателей, плоскость размещения которых параллельна фоточувствительной площадке фотоприемного устройства, причем в качестве объектива используется телеобъектив с внутренней фокусировкой.
Признаками прототипа, совпадающими с существенными признаками заявленного изобретения, является наличие оптической системы, ПЗС матрицы, блока преобразования изображения в цифровой массив, вычислителя координат энергетического центра тяжести, индикатора результатов и шины «Пуск»
Причиной, препятствующей получению технического результата, является то, что для определения признака положения объекта используется лишь один параметр, энергетический центр, что приводит к снижению достоверности результатов контроля расстояния между объектами из за того, что изображения разных протяженных объектов могут искажаться от различного уровня засветок или разных уровней освещенности, что будет приводить к большому разбросу расчетного положения центра тяжести и, соответственно, результатов контроля.
Задачей заявляемого изобретения является создание устройства контроля относительного перемещения объектов, обеспечивающего высокую достоверность результатов контроля без существенного увеличения затрат на повышение точностных характеристик аппаратной части устройства.
Это достигается путем того, что контроль взаимного положения объектов осуществляется путем оценки расстояния между ними по совокупности нескольких характеристик положения одного объекта по отношению к другому.
Суть изобретения заключается в том, что оценку положения изображений объектов в кадре проводят по параметру, который является интегральной характеристикой нескольких значимых признаков положения их, при этом значимость каждого признака определяется соответствующими коэффициентами влияния.
Технический результат достигается за счет того, что в устройство контроля перемещения объектов относительно друг друга, содержащее оптическую систему, через которую изображения контролируемых n объектов попадают на ПЗС матрицу, выход которой подключен ко входу блока преобразования изображений объектов в цифровой массив, первый вычислитель координат центра объекта, индикатор результатов и шину «Пуск», введены блок задания весовых коэффициентов, блок вычисления интегрального центра каждого i-го объекта (i принимает значения от 1 до n); блок запоминания координат, блок вычисления расстояний между объектами, задатчик допустимых значений расстояний между объектами, блок сравнения расстояний, блок управления и (m-1) вычислителей координат центра объекта по j-му признаку положения объекта (j принимает значения от 1 до m), информационные входы всех m вычислителей координат центра объекта соединены с выходом блока преобразования изображений, а выходы подключены к m входам блока вычисления интегрального центра каждого i-го объекта, к (m+1)-му входу которого подключен блок задания весовых коэффициентов, а выход блока вычисления интегрального центра каждого i-го объекта через блок запоминания координат соединен с входом блока вычисления расстояний между объектами, выход которого подключен к первому входу блока сравнения расстояний, со вторым входом которого соединен задатчик допустимых значений расстояний, а выход подключен к индикатору результатов и входу блока управления, со вторым входом которого соединена шина «Пуск», а выходы его подключены, соответственно, к управляющим входам ПЗС матрицы, блока преобразования изображения в цифровой массив, вычислителей координат центра каждого объекта по j-му признаку положения объекта, блока задания весовых коэффициентов, блока вычисления интегрального центра, блока запоминания координат, блока вычисления расстояний между объектами, блока сравнения расстояний между объектами и индикатора результатов.
Возможность осуществления изобретения подтверждается тем, что авторами проведено полунатурное моделирование процессов измерения и отдельных узлов устройства.
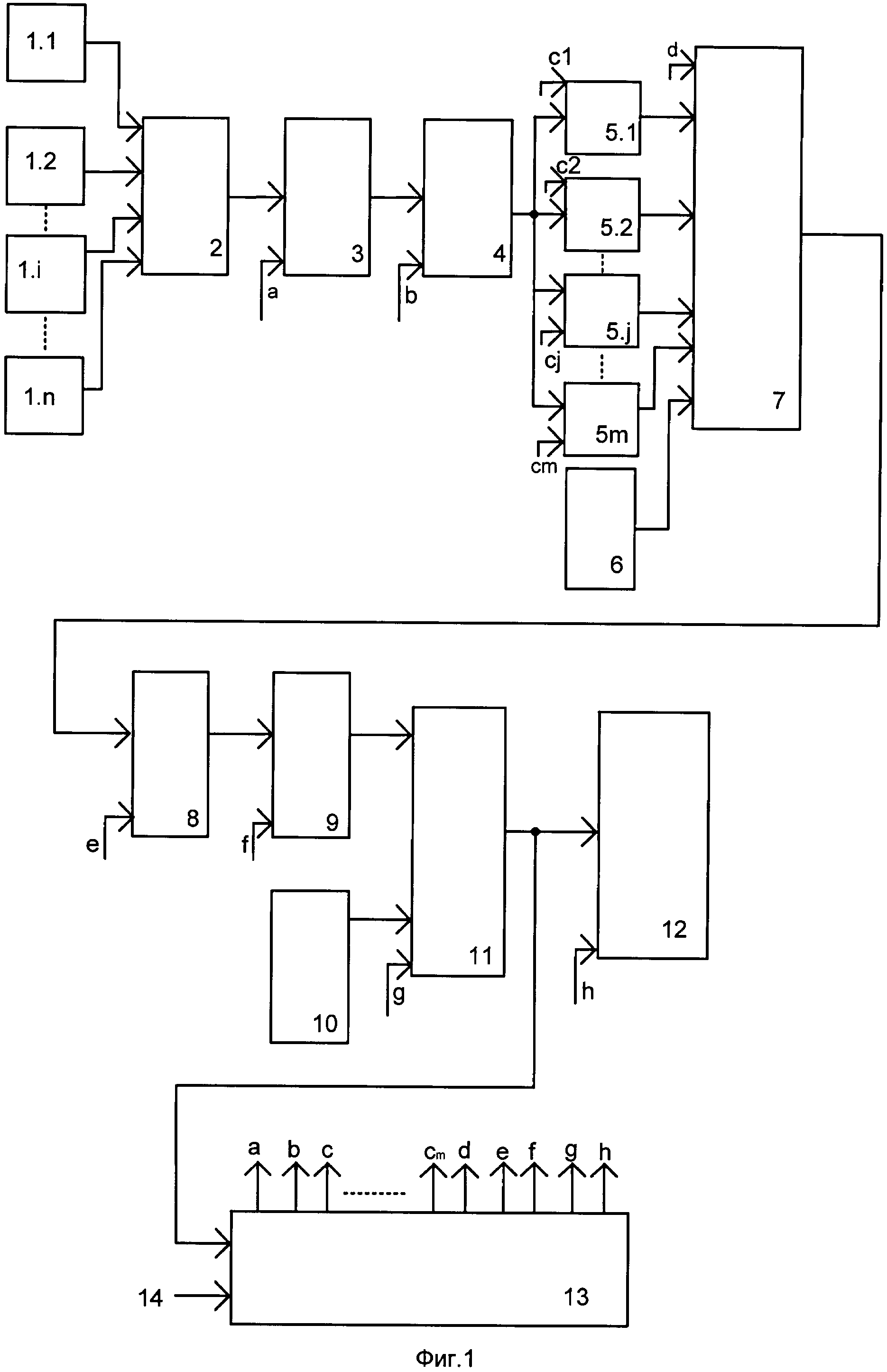
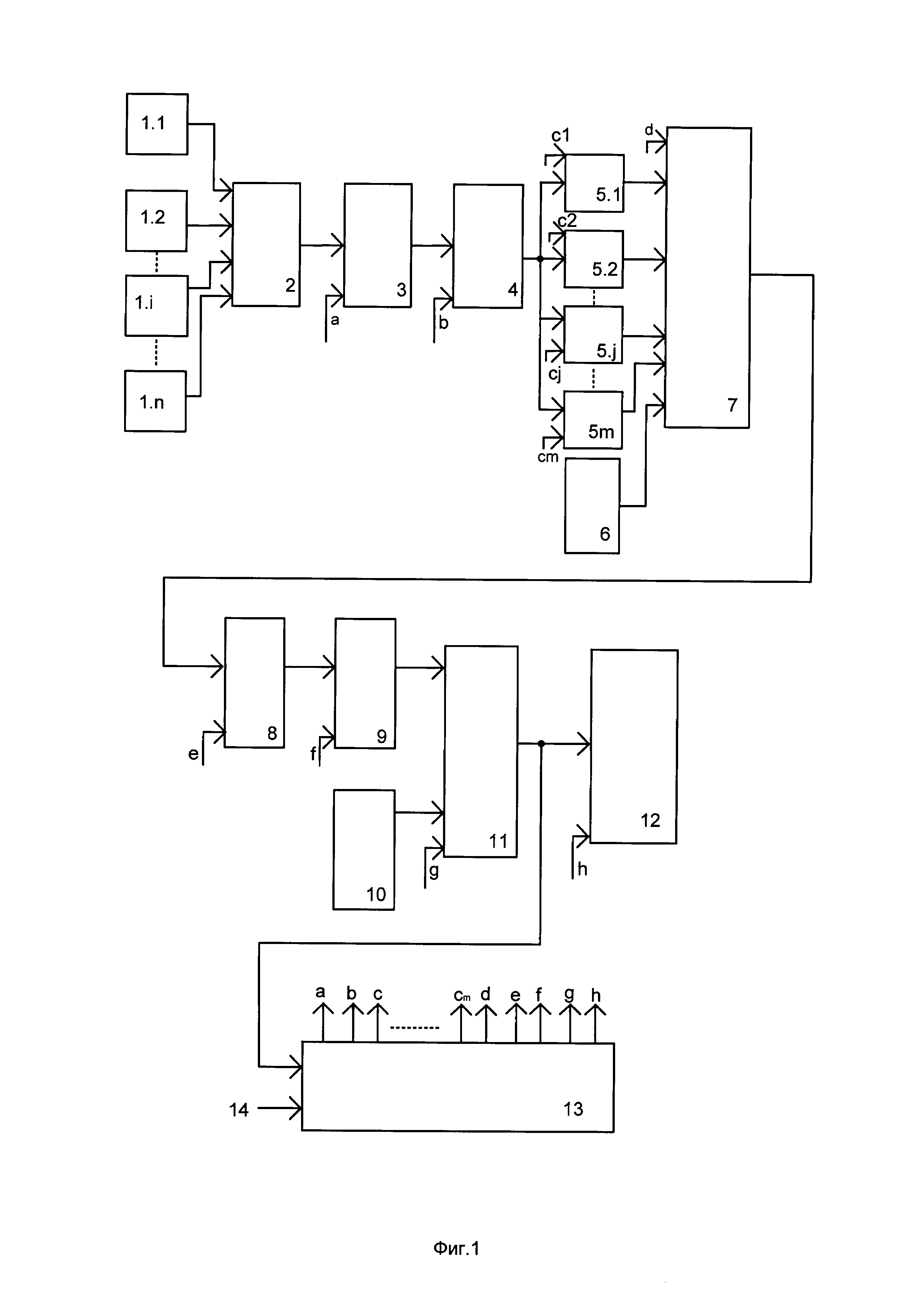
На фигуре 1 приведена структурная схема устройства, в состав которого входят следующие блоки:
1.1 - 1.n - контролируемые объекты (КО);
2 - оптический блок (ОБ), для формирования электрического эквивалента изображения объектов на поверхности ПЗС-матрицы;
3 - ПЗС-матрица;
4 - блок преобразования изображения в цифровой массив (БПИ);
5.1 - 5.m - вычислитель координат центра каждого 1.i-го объекта (i принимает значения от 1 до n) по j-му признаку положения объекта (j принимает значения от 1 до m) (такими признаками могут быть, например, барицентр, центр тяжести геометрической фигуры и т.п.);
6 - блок задания весовых коэффициентов для координат соответствующего признака положения объекта (БЗВК);
7 - блок вычисления интегрального центра, определяющего положение объекта (БВИ) каждого 1.i-го объекта;
8 - блок запоминания координат (БЗК) всех контролируемых объектов;
9 - блок вычисления расстояний (БВР) между объектами;
10 - задатчик допустимых значений (ЗДЗ) расстояний между объектами;
11 - блок сравнения (БС) расстояний между объектами с допустимыми значениями;
12 - индикатор результатов (ИР);
13 - блок управления (БУ);
14 - шина «Пуск».
Измеритель работает по алгоритму, определенному БУ13. Очередность выполнения операций в процессе работы устройства приведена на фигуре 2, где,
15 - начало;
16 - установить допустимые расстояния между объектами в блоке ЗДЗ 10;
17 - преобразовать оптические изображения объектов в электрические эквиваленты их в ПЗС-матрице 3;
18 - преобразовать изображение объектов в цифровой массив (выявить массивы отсчетов соответствующих каждому из i объектов);
19 - начать обработку массива с первого объекта: присвоить i=1;
20 - начать расчет положения объекта с первого признака положения i-го объекта: присвоить j=1;
21 - вычислить j-й центр i-того объекта по j-му признаку;
22 - занести координаты j-го центра 1-го объекта в блок БВИ 7;
23 - перейти к обработке (j+1)-го центра 1-го объекта;
24 - проверить условие j>m, если «Нет», то перейти к пункту 21,
если «Да», то перейти к пункту 25;
25 - вычислить интегральный центр, определяющий положение 1.i-го объекта по m признакам положения объекта;
26 - занести в блок запоминания координат объектов центр i-го объекта;
27 - перейти к обработке i+1 объекта, присвоить i=i+1;
28 - проверить условие i>n, если «Нет», то перейти к пункту 20,
если «Да», то перейти к пункту 29;
29 - вычислить расстояние между объектами в блоке БВИ 9;
30 - сравнить расстояния между объектами с допустимыми расстояниями, проверить условия Sr>Вrдоп:
если «Нет», то перейти к пункту 17,
если «Да», то перейти к пункту 31;
31 - индицировать результат контроля;
32 - конец.
Устройство контроля перемещения объектов относительно друг друга, содержит ряд блоков, связанных между собой определенным образом (см. фиг. 1). Изображения всех 1.1-1.n объектов через оптический блок ОБ 2 отображены на ПЗС-матрице 3, выход которой соединен с блоком преобразования изображения в цифровой код БПИ 4, который считывает параметры объектов. Выход блока БПИ 4 подключен к первым входам блоков ВК 5.1 - ВК 5.m, выходы которых соединены с соответствующими m-входами блока вычисления интегрального центра БВИ 7, (m+1)-й вход которого соединен с блоком задания весовых коэффициентов БЗВК 6. Выход БВИ 7 через блок запоминания координат БЗК 8 подключен к блоку вычисления расстояний между объектами БВР 10, выход которого соединен с блоком сравнения БС11, второй вход которого подключен к задатчику допустимых значений ЗДЗ 10, а выход - ко входу блока индикации результатов ИР 12 и первому входу БУ13. Шина «Пуск» 14 соединена со вторым входом блока управления БУ 13, выходы которого подключены к управляющим входам блоков ПЗС 3, БПИ 4, ВК 5.1 - ВК 5.m, БВИ 7, БЗК 8, БВР 9, БС 11 и ИР 12.
Работа устройства контроля перемещения объектов относительно друг друга осуществляется в соответствии с алгоритмом, приведенным на фигуре 2, в следующей последовательности. Изображения контролируемых объектов 1.1 - 1.n с помощью ОБ 2 формируются в виде распределения электрических потенциалов на светочувствительном слое ПЗС-матрицы 3. По команде от БУ 13 блок БПИ 4 считывает информацию с ПЗС 3 и создает массивы данных кадра изображения контролируемых объектов. По следующей команде БУ 13 блоки ВК 5.1 - ВК 5.m вычисляют координаты центра 1.1-го объекта по каждому из m признаков положения объекта и заносят эти координаты в блок БВИ 7, который по этим m признакам вычисляет интегральный центр первого объекта, координаты которого он заносит в блок БЗК 8. Процедура вычисления координат интегрального центра каждого контролируемого объекта повторяется до тех пор, пока в блоке БКЗ 8 не будут сформированы координаты интегральных центров всех n объектов. После этого в БВР 9 производится вычисление расстояний между интегральными центрами объектов, что трактуется как расстояние между объектами. В блоке БС 11 осуществляется сравнение измеренных расстояний с допустимыми, хранящимися в блоке ЗДЗ 10 и занесенными в него до начала работы устройства. Если расстояния между объектами выйдут за поле допуска, то БС 11 вырабатывает сигналы на ИР12 и БУ13 о результатах контроля.
Таким образом, предлагаемое устройство контроля перемещения объектов относительно друг друга позволяет существенно повысить достоверность результатов контроля, исключить сбои, связанные с деградацией световых характеристик объектов и различных дефектов оптической системы.
Устройство контроля перемещения объектов относительно друг друга, содержащее оптическую систему, через которую изображения контролируемых n объектов попадают на ПЗС матрицу, выход которой подключен ко входу блока преобразования изображений объектов в цифровой массив, первый вычислитель координат центра объекта, индикатор результатов и шину «Пуск», отличающееся тем, что в него введены блок задания весовых коэффициентов, блок вычисления интегрального центра каждого i-го объекта (i принимает значения от 1 до n); блок запоминания координат, блок вычисления расстояний между объектами, задатчик допустимых значений расстояний между объектами, блок сравнения расстояний, блок управления и (m-1) вычислителей координат центра объекта по j-му признаку положения объекта (j принимает значения от 1 до m), информационные входы всех m вычислителей координат центра объекта соединены с выходом блока преобразования изображений, а выходы подключены к m входам блока вычисления интегрального центра каждого i-го объекта, к (m+1)-му входу которого подключен блок задания весовых коэффициентов, а выход блока вычисления интегрального центра каждого i-го объекта через блок запоминания координат соединен с входом блока вычисления расстояний между объектами, выход которого подключен к первому входу блока сравнения расстояний, со вторым входом которого соединен задатчик допустимых значений расстояний между объектами, а выход подключен к индикатору результатов и входу блока управления, со вторым входом которого соединена шина «Пуск», а выходы его подключены, соответственно, к управляющим входам ПЗС матрицы, блока преобразования изображения в цифровой массив, вычислителей координат центра каждого объекта по j-му признаку положения объекта, блока задания весовых коэффициентов, блока вычисления интегрального центра, блока запоминания координат, блока вычисления расстояний между объектами, блока сравнения расстояний между объектами и индикатора результатов.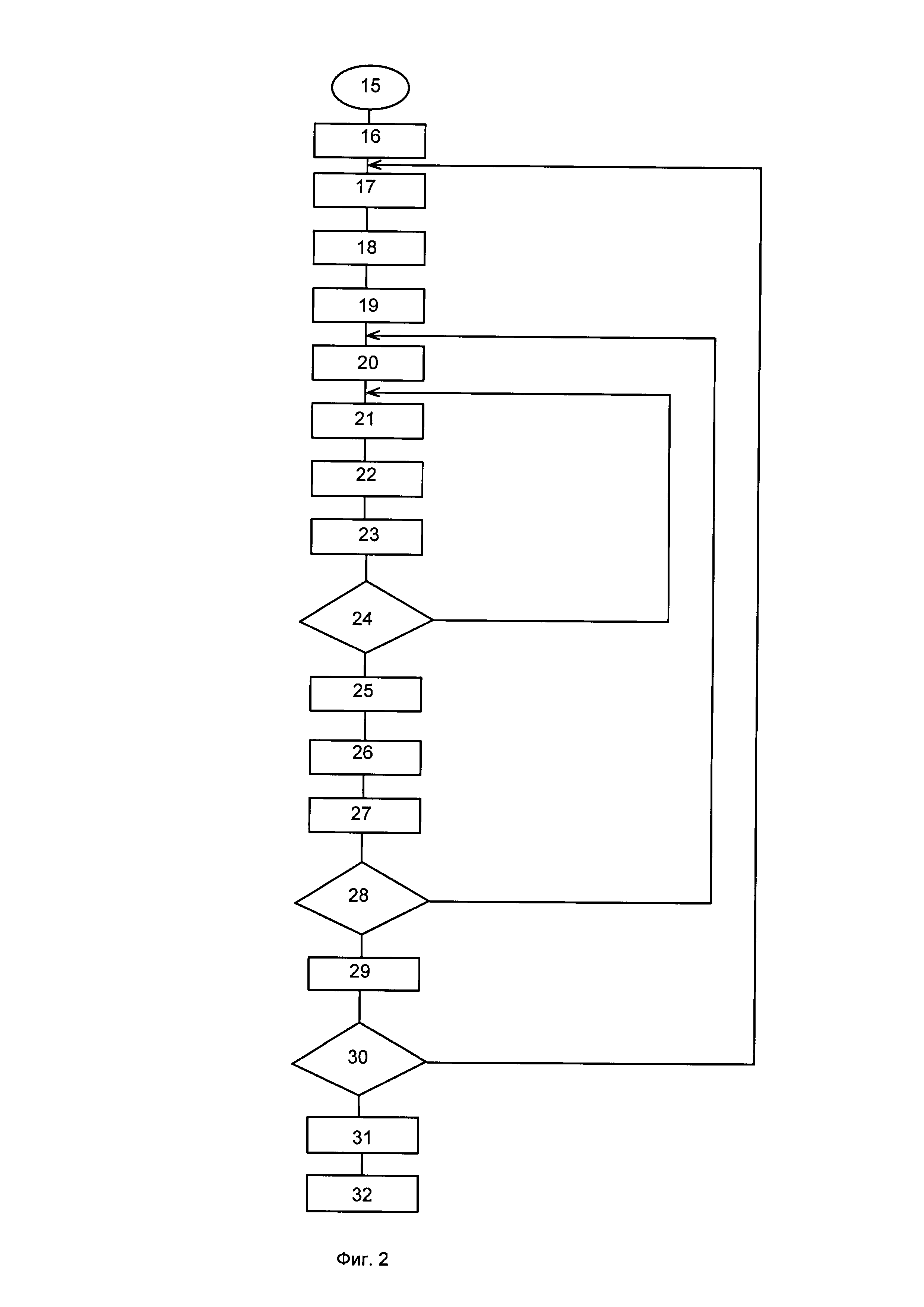
Устройство тестового контроля
Устройство формирования линейно-частотно-модулированных сигналов
Масса для изготовления абразивного инструмента
Способ лазерного управляемого термораскалывания сапфировых пластин
Акустооптический измеритель параметров радиосигналов с повышенным разрешением
Четырехконтактный элемент интегрального коммутатора
Интегральный туннельный акселерометр
Интегральный микромеханический гироскоп-акселерометр
Интегральный микромеханический гироскоп-акселерометр
Высокочувствительный преобразователь емкости в частоту
Способ измерения расстояния между объектами
Устройство контроля электрических параметров пиросредств
Способ управления подрывом пиросредств
Способ контроля электрического сопротивления изоляции шин питания относительно корпуса
Многоканальный измеритель сопротивления изоляции
Способ термообработки сыпучих материалов
Контактное устройство для передачи электроэнергии между подвижными частями системы

