Результат интеллектуальной деятельности: Система управления движением судна с дублированием каналов курса и резервным управлением по курсу
Вид РИД
Изобретение
Система управления движением (СУД) судна с дублированием каналов курса и системой резервного управления движением относится к области судостроения. Рассматриваемая СУД. является отказоустойчивой системой, т.к. дополнена трехканальным дублированием линий курса и резервным управлением рулевым приводом судна.
В существующих СУД обычно применяют «ПД» закон управления движением судна, что приводит при появлении внешних возмущений, воздействующих на судно (это морское волнение, ветровые нагрузки), к весьма отрицательным явлениям. Сейчас начали появляться СУД, в которых «ПД» закон управления дополняется сигналом оценки внешнего возмущающего момента - Мвозм. (1.1):

где
δ угол перекладки руля,
ϕ, ϕзд - текущий курс судна ϕ и заданный угол курса ϕзд„
ω - угловая скорость судна,
κI=Кl.К2.К3 - коэффициенты регулирования,
МВОЗМ. - внешний возмущающий момент.
Известна полезная модель «Система автоматического управления движением судна по заданной траектории» (RU 151140 U1, 20.03.2015). Автоматическое управление движением судна основано на использовании информации от приемника навигационной системы текущего курса ϕ, датчика угловой скорости ω, задатчика угла курса ϕзд.., датчика руля - δ и сумматора, в котором по сигналам: текущего курса, заданного курса, угловой скорости судна и угла перекладки руля формируется «ПД» закон управления рулевым приводом судна.
Известна «Система автоматического управления движением судна» (RU 2240953 С1, 27.11.2004). Автоматическое управление движением судна основано на использовании информации от приемника спутниковой навигационной системы, датчика угловой скорости, блока заданного значения путевого угла (угла курса) и сумматора, в котором по сигналам: текущего путевого угла, заданного путевого угла, угловой скорости судна формируется «ПД» закон управления рулевым приводом судна.
Система по патенту (RU 157389 U1, 27.11.2015) решает близкую задачу управления движением судна с использованием «ПД» закона управления, который дополнен сигналом оценки внешнего возмущающего момента на судно от морского волнения - Мвозм, (патент RU 157389 принят нами в качестве прототипа), см. зависимость (1.1). Прототип содержит информацию от приемника спутниковой навигационной системы (текущего путевого угла - ПУ. или. угла курса ϕ), датчика угловой скорости судна ω, задатчика путевого угла ПУзд. (или заданного угла курса ϕзд), датчика руля - δ, оценки внешнего возмущающего момента - Мвозм и сумматора, в котором перечисленные сигналы суммируют и вводят на вход рулевого привода. Так формируется автоматическое управление по заданному курсу ϕзд.
Однако существующие СУД, которые при спокойном море и безветрии обеспечивают точное управление движением по заданному направлению, при появлении волнения на море создают недопустимые условия работы рулевого привода и снижают скорость хода судна, поэтому дополнение «ПД» закона управления сигналом оценки внешнего возмущения необходимо, что позволит существенно повысить качество управления (важно, при этом, сформировать высококачественный сигнал оценки внешнего возмущения, что усложняет СУД, снижает надежность и требует построения отказоустойчивой СУД!).
Таким образом, применение известных СУД, которые дополнены блоком внешнего возмущения, допустимо только при переводе их в отказобезопасные СУД.
Техническим результатом предлагаемого изобретения является:
- введение тройного резервирования каналов заданного угла курса и текущего курс судна, формирования среднего заданного угла курса ϕзд ср. и среднего курса судна ϕср.,
- дополнение СУД резервным каналом автоматического управления движением судна по заданному курсу.
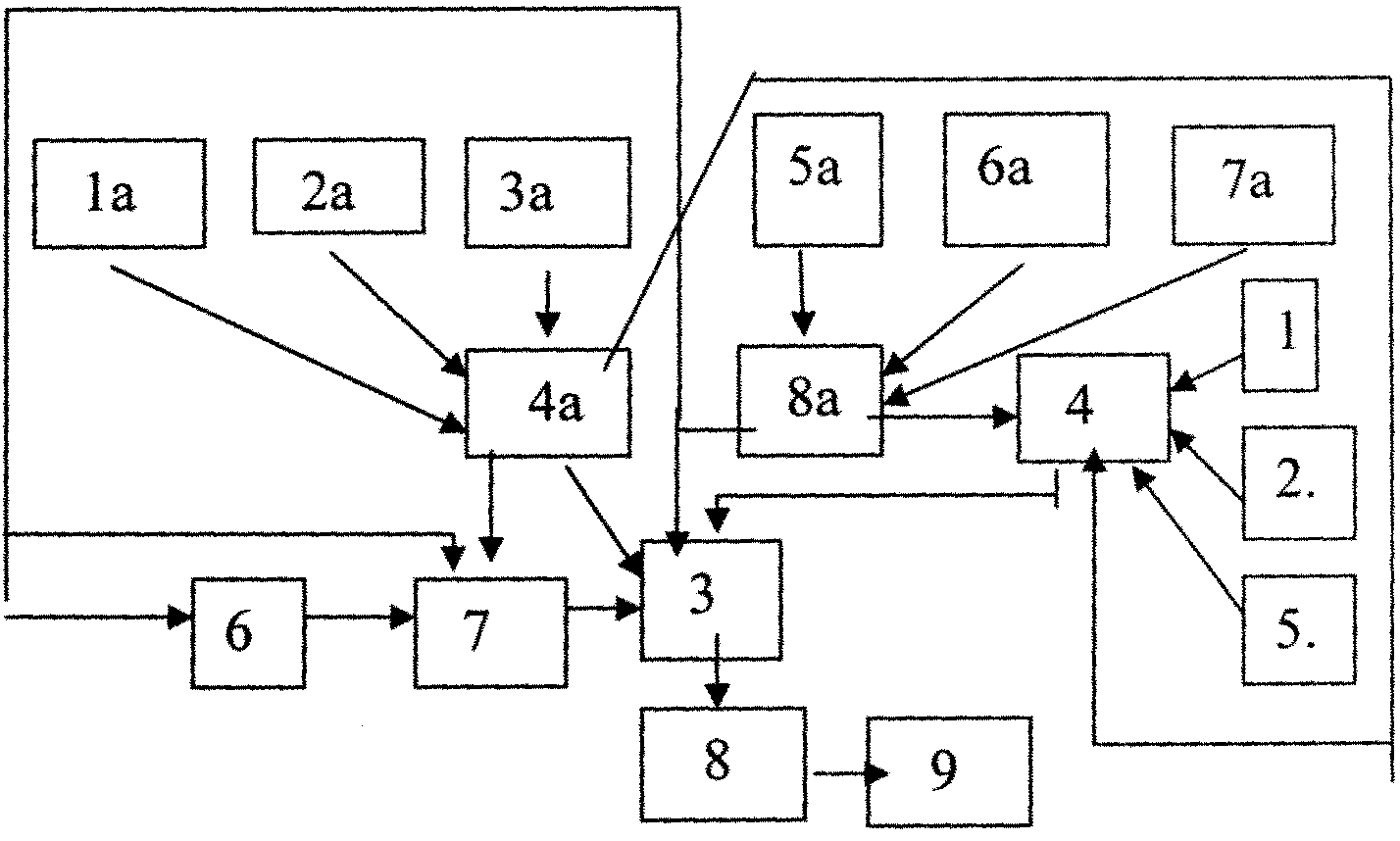
Технический результат достигается тем, что система правления движением судна с дублированием каналов курса и резервным управлением движения содержит датчик руля δ, 1, датчик дифференцирования ω. 2., блок логики 3., три задатчика угла курса ϕзд. 1а., 2а., 3а, первый сумматор 4., блок среднего заданного угла курса 4а, блок оценки возмущающего момента Мвозм. 5., дифференциатор 6., три датчика курса судна ϕ 5а., 6а, 7а., второй сумматор 7., рулевой привод 8., объект управления - судно 9., блок среднего курса судна ϕср. 8а., к входу которого подключены три датчика курса судна ϕ 5а, 6а и 7а, к входу первого сумматора 4. подключены:
- датчик руля δ, 1*
- датчик дифференцирования ω. 2,
- блок среднего заданного угла курса ϕзд..ср., 4а,
- блок среднего курса судна ϕср. 8а.,
- блок оценки возмущающего момента Мвозм. 5.,
выход первого сумматора 4. подключен к входу блока логики 3,
к входу второго сумматора 7. подключены:
- блок среднего заданного угла курса ϕзд..ср., 4а.,
- дифференциатор 6., вход которого соединен с выходом блока среднего курса судна ϕсρ 8а,
- блок среднего курса судна ϕср., 8а., выход второго сумматора 7. подключен к входу блока логики 3.. выход блока логики 3. подключен к входу рулевого привода 8., в блоке логики 3. формируется модуль от неравенства (3).

где ϕср.. - средний курс судна с блока среднего курса судна ϕср. 8а.,
ϕзд..ср. - средний заданный угол курса с блока ϕзд..ср. 4а,
Δуст.=const.,
если неравенство (3 ) удовлетворяется, выход первого сумматора 4. через блок логики 3. подключается к входу рулевого привода 8., формируя типовое управление движением судна (1)., если неравенство (3) не удовлетворяется, выход второго сумматора 7. через блок логики 3. подключает к входу рулевого привода 8., сигнал с законом резервного управления .(2.)., вместо зависимости. (1.).
* только для крупных судов с инерционным рулевым приводом.
Технический результат достигается благодаря дополнения СУД:
- тремя задатчиками угла курса ϕзд. 1а., 2а., 3а. и блоком среднего заданного угла курса ϕзд.ср,, 4а,
- тремя датчиками курса судна ϕ 5а, 6а., 7а. и блоком среднего курса судна ϕср. 8а.,
- блоком логики 3. (для диагноза сбоя и переключения основного типового закона управления движением судна, сформированного в соответствии с зависимостью (1):

где δ угол перекладки руля,
ϕср., ϕзд..ср. - средний курс судна ϕср. и средний заданный угол курса ϕзд,ср..,
ω - угловая скорость судна,
Кi - К1.К2. коэффициенты регулирования,
МВОЗМ. - внешний возмущающий момент,
- автоматическим переходом на резервный закон автоматического управления, который сформирован по зависимости (2).:

где: δ - угол заданной перекладки руля,
ϕср., ϕзд..ср. - средний курс судна ϕср. и средний заданный угол курса ϕзд..ср.,
ω - угловая скорость судна, формируется в дифференциаторе 6.,. вход которого подключен к выходу блока среднего курса судна 8а.,
Кι - К1.,К2. коэффициенты регулирования,
dδ/dt - заданная угловая скорость руля (для ряда рулевых приводов 8. заменяется заданным углом перекладки руля - δзд.).
Таким образом, при появлении сбоя в СУД управление движением судна с использованием типового закона управления (1) переводится на резервный закон управления (2).
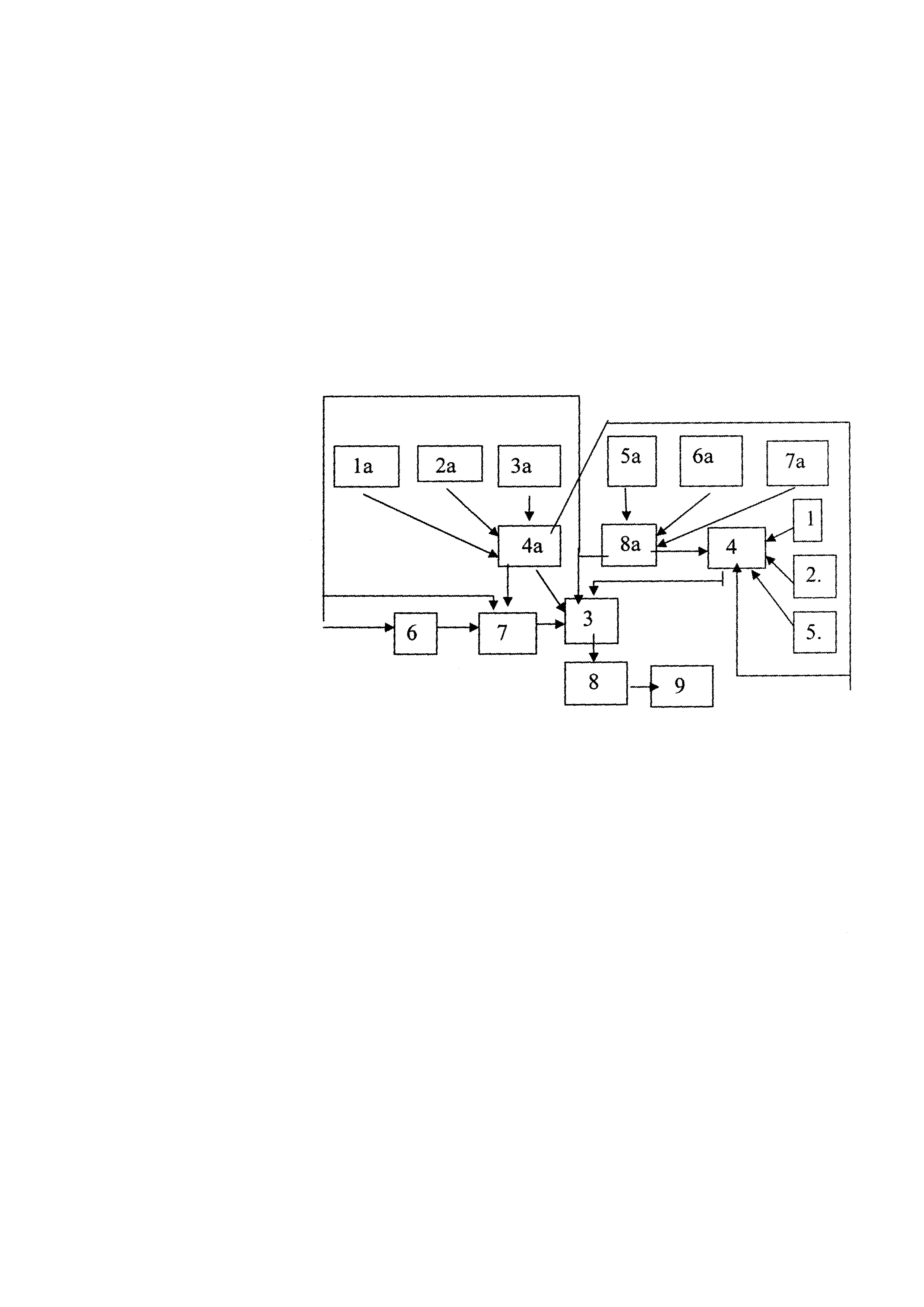
На чертеже представлена блок-схема СУД судна.
Предлагаемая СУД судна с дублированием каналов курса и резервным управлением движением судна содержит датчик руля δ, 1, датчик дифференцирования ω. 2., блок логики 3., три задатчика угла курса ϕзд. 1а., 2а., 3а, первый сумматор 4., блок среднего заданного угла курса. 4а, блок оценки возмущающего момента Мвозм. 5., дифференциатор 6., три датчика курса судна ϕ 5а., 6а, 7а., второй сумматор 7., рулевой привод 8. объект управления - судно 9., блок среднего курса судна ϕср. 8а., к входу которого подключены три датчика курса судна ϕ 5а, 6а и 7а. В блоке 8а с использованием неравенств (8аа) или (8ааа) или (8аааа) или (8ааааа), формируют один сигнал ϕср.), выход блока 8а соединяют с входом первого сумматора 4.
К входу первого сумматора 4. подключены:
- датчик руля δ, 1,
- датчик дифференцирования ω. 2,
- блок среднего заданного угла курса ϕзд..ср., 4а,
- блок среднего курса судна ϕср. 8а.,
- блок оценки возмущающего момента Мвозм. 5.,
выход первого сумматора 4. подключен к входу блока логики 3., (на выходе первого сумматора 4. формируется типовой закон управления движением судна (1).
К входу второго сумматора 7. подключены:
- блок среднего заданного угла курса ϕзд..ср., 4а.,
- дифференциатор 6.,
- блок среднего курса судна ϕср. 8а.
на выходе второго сумматора 7. формируется закон резервного управления движением судна (2).
Выход второго сумматора 7. подключен к входу блока логики 3. выход блока логики 3. подключен к входу рулевого привода 8., в блоке логики 3. формируется модуль от неравенства (3).

где ϕср.. - средний курс судна, с блока среднего курса судна ϕср. 8а.,
ϕзд..ср. - средний заданный угол курса, с блока ϕзд..ср. 4а,
Δуст.=const.
Если неравенство (3.) удовлетворяется, переключатель каналов управления в блоке логики 3., подключает выход первого сумматора 4., к входу рулевого привода 8., формируя тем самым в СУД судна типовое управление движением судна (1.):

где δ - угол перекладки руля,
ϕср., ϕзд..ср. - средний курс судна ϕср. и средний заданный угол курса ϕзд,ср,
ω - угловая скорость судна,
Кi - К1.К2. коэффициенты регулирования,
МВОЗМ.. - внешний возмущающий момент.
Если неравенство (3). не удовлетворяется, переключателем каналов управления в блоке логики 3., подключается второй сумматор 7.. к входу рулевого привода 8., формируя тем самым в СУД судна резервное управление .(2.).;

Формирование основных узлов СУД
1. Особенности вычисления сигнала ϕзд..ср., в блоке 4а и сигнала ϕср. в блоке 8а.
Для построения отказоустойчивой СУД введено:
- тройное дублирование канала заданного угла курса ϕзд.,
- тройное дублирование каналов курса судна ϕ.
- диагностирование СУД,
(при обнаружении сбоя в СУД осуществляется автоматический переход на отказоустойчивое резервное управление движением судна).
Формирование сигнала среднего заданного угла курса ϕзд..ср., в блоке 4а.
Для вычисления среднего заданного угла курса ϕзд ср., в блоке 4а. формируют три модуля от неравенств (1а) и (2а) и (3а):



где ϕзд.1а, ϕзд.2а, ϕзд.3а.- выходные сигналы трех задатчиков угла курса 1а, 2а, 3а.
Если удовлетворяются все три зависимости (1а) и (2а) и (3а), то в блоке среднего заданного угла курса ϕзд. ср. 4а. вычисляют значение среднего заданного угла курса ϕзд.ср. в соответствии с зависимостью (4аа) и вводят в блок 4а:

(Затем продолжают процесс проектирования СУД, считая формирование ϕзд..ср. по п. 1). полностью выполненным).
Если удовлетворяется только одна зависимость из трех: (1а) или (2а) или (3а), пусть это будут:
- неравенство (1а), то в блоке среднего заданного угла курса ϕзд. ср. 4а. формируют сигнал ϕзд.ср. в соответствии с зависимостью (4ааа) и вводят в блок 4а:

(Затем продолжают процесс проектирования СУД, считая формирование ϕзд..ср по п. 1.) выполненным),
- или неравенство (2а), то в блоке среднего заданного угла курса ϕзд..ср. 4а. формируют сигнал ϕзд.ср. в соответствии с зависимостью (4аааа). и вводят в блок 4а:

(Затем продолжают процесс проектирования СУД, считая формирование ϕзд..ср по п. 1.). выполненным).
- или неравенство (3а), то в блоке среднего заданного угла курса ϕзд..ср. 4а. формируют сигнал ϕзд.ср. в соответствии с зависимостью (4ааааа) и вводят в блок 4а:

(Затем продолжают процесс проектирования СУД, считая формирование ϕзд..ср по п. 1.). выполненным).
Вычисление сигнала среднего курса судна ϕср., в блоке 5а.
Для вычисления среднего курса судна ϕср., в блоке 8а. формируют три модуля от неравенств (5а) и (6а) и (7а):



где
ϕ.5а, ϕ6а, ϕ7а. - выходные сигналы трех датчиков курса судна: 5а, 6а, 7а.
Если удовлетворяются все три зависимости (5а) и (6а) и (7а), то в блоке среднего курса судна ϕср. 8а. вычисляют значение среднего курса судна ϕср. в соответствии с зависимостью (8аа) и вводят в блок 8а:

(Затем продолжают процесс проектирования СУД, считая формирование ϕср по п. 1. выполненным).
Если удовлетворяются только одна зависимость из трех (пусть это будут зависимости (5а), то в блоке среднего курса судна ϕср. 8а. формируют сигнал ϕср. в соответствии с зависимостью (8 ааа):

Сигнал ϕср. по зависимости (8.ааа) вводят в блок 8.а. и переходят к следующему пункту построения системы управления движением судна.
Если удовлетворяются другие две зависимости (пусть это будут зависимости (6а) или (7а), которые фиксируют сбой во втором датчике курса судна (6а) или в третьем (7а)„ то в блоке среднего курса судна ϕср. 8.а. формируют сигнал ϕср. в соответствии с зависимостью (8. Аааа):

или если сбой в третьем датчике курса судна, то в соответствии с зависимостью (8.ааааа):

образом при вычислении ϕзд.ср. если СУД полностью исправна используют зависимость (4аа), или если в одном из трех задатчиков 1а или 2а или За произошел сбой, то используют зависимости (4ааа) или (4аааа) или (4ааааа).
Сигнал ϕср. формируют аналогично с ϕзд.ср. используя зависимости по (8.аа…) или (8.ааааа), вводят в блок 8.а и переходят к следующему пункту построения системы управления движением судна.
Одной из особенностей функционирования, рассматриваемого предложения является использование в процессе плавания переменного объема информации, перестройки структуры узлов и блоков.
2. Законы управления движением судна
а) Формирование типового закона управления движением судна(1) в первом сумматоре 4.
В рассматриваемой полезной модели используется «модернизированный ПД» закон управления в соответствии с зависимостью (1)., который формируется в первом сумматоре 4., учитывающий внешние воздействия на судно при волнении на море,
б). Формирование закона резервного управления (2).
Во втором сумматоре 7. формируется закона резервного управления (2),

где ω - поступает с дифференциатора 6. на пассивных элементах,
ϕзд.ср., - поступает с выхода блока среднего заданного угла курса 4а.,
ϕср. - поступает с выхода блока среднего курса судна 8а.,
К1, К2 -коэффициенты регулирования.
Отказоустойчивое управления в нем повышено за счет тройного резервирования.
в) Формирование факта сбоя в СУД и переключение на резервное управление при сбое и при изменении ϕзд ср,>C2.
В блоке логики 3. формируется неравенство (3), состояние которого диагностирует СУД, а при появлении сбоя переключает закон управления с (1) на (2).



Способ определения наружного объема цилиндрического изделия
Индукторный электрогенератор с гибким статором
Способ получения электрической энергии в индукторном генераторе с гибким статором
Способ определения уровня жидкого металла в технологической емкости
Устройство для обезвоживания нефтепродукта путем выпаривания водяных капелек
Бесконтактный радиоволновый способ определения уровня жидкости в емкости
Устройство для измерения физических параметров диэлектрического листового материала
Способ определения толщины льда
Устройство для измерения физических свойств жидкости
Способ преобразования механической энергии движения текучей среды в электрическую энергию
Аппаратура управления движением корабля с блоком диагностики
Способ автоматического управления движением судна
Способ выбора исполнительных средств в системе расхождения судна с встречным объектом
Способ управления движением корабля с диагнозом сбоев
Устройство программного управления движением судна

