Результат интеллектуальной деятельности: УСТРОЙСТВО УСКОРЕННОГО КОМПОСТИРОВАНИЯ ОРГАНИЧЕСКИХ ОТХОДОВ
Вид РИД
Изобретение
Изобретение относится к сельскому хозяйству, в частности к автоматизированным устройствам управления процессом термического обеззараживания бурта твердого навоза.
Устройство позволяет определять основные физико-механические параметры навозного бурта (температуры и влажности в контрольных точках бурта), влияющие на процесс термического обеззараживания твердого навоза.
Известен компостер непрерывного действия (патент WO 9520554, кл. C05F 17/02, от 25.01.1995 г.), в котором предусмотрено шаговое перемещение несвязанных между собой ферментационных контейнеров по направляющим от единой точки загрузки к выгрузке при помощи толкающих плунжеров. Такая конструкция существенно ограничивает максимальную длину, а следовательно, и объем каждой из ферментационных емкостей величиной технически реализуемого хода плунжера, не контролирует физические параметры исходного сырья и не управляет процессом компостирования, а также имеет существенную металлоемкость и энергозатраты.
Известно устройство для компостирования (патент GB №2317383, C05F 17/02 от 18.09.1996 г.), состоящее из неподвижных контейнеров для приема и ферментации органических отходов, в каждый из которых через управляемые клапаны по распределительной трубе подается воздух, обеспечивающее интенсификацию процесса в каждом отдельном контейнере. Такое устройство не позволяет контролировать физические параметры сырья и управлять процессом компостирования, объем компостируемого сырья ограничивается количеством контейнеров, а само устройство характеризуется значительной металлоемкостью конструкции.
Известно устройство для компостирования (патент RU №2271883 С1 от 20.10.2004), включающее средства подачи исходного сырья, ферментационные емкости, снабженные устройствами аэрации, средства перемещения и выгрузки готового продукта, выполнено многорядным, состоящим из параллельных установленных на общей платформе направляющих для продольного и поперечного перемещения ферментационных емкостей, кинематически связанных между собой и с устройством для продольного перемещения. Такая конструкция также не позволяет контролировать физические параметры сырья и управлять процессом компостирования, объем компостируемого сырья ограничивается количеством контейнеров, характеризуется значительной металло- и энергоемкостью конструкции.
Задачей настоящего изобретения является уменьшение времени обеззараживания и переработки навоза (помета) для ускоренного получения концентрированных органических удобрений (КОУ).
Для устранения указанных недостатков предлагается устройство ускоренной переработки навоза и других органических отходов с контролем процесса его переработки и возможностью внесения биологически активной добавки (БАД).
Для решения поставленной задачи в предлагаемом устройстве результат достигается путем равномерного перемешивания содержимого по всему объему бурта, способствующего ускоренному его самонагреву до 65-70°С и доведению влажности навозной массы менее 70%, с выдерживанием при таких параметрах в течение 36-48 часов.
Перемешивание навоза в буртах осуществляется самоходным ворошителем с установленной на нем системой контроля параметров и внесения БАД.
Предлагаемое устройство функционирует следующим образом. Навоз транспортируется на площадку для буртования и формируется в бурты. Через 4-6 часов производится замер температуры и влажности навоза в начале, середине и конце бурта с последующим перемешиванием слоев. Бортовой компьютер производит анализ полученных результатов замеров. При получении в результате замеров в контрольных точках температуры меньше 65°С и влажности больше 70% через 8 часов процесс замера и перемешивания повторяется до достижения значений контролируемых показателей. После достижения в контрольных точках значений температуры 65°С и влажности менее 70% и выдерживании этих показателей в течение 24 часов, процесс компостирования считается завершенным и полученные КОУ готовы к использованию.
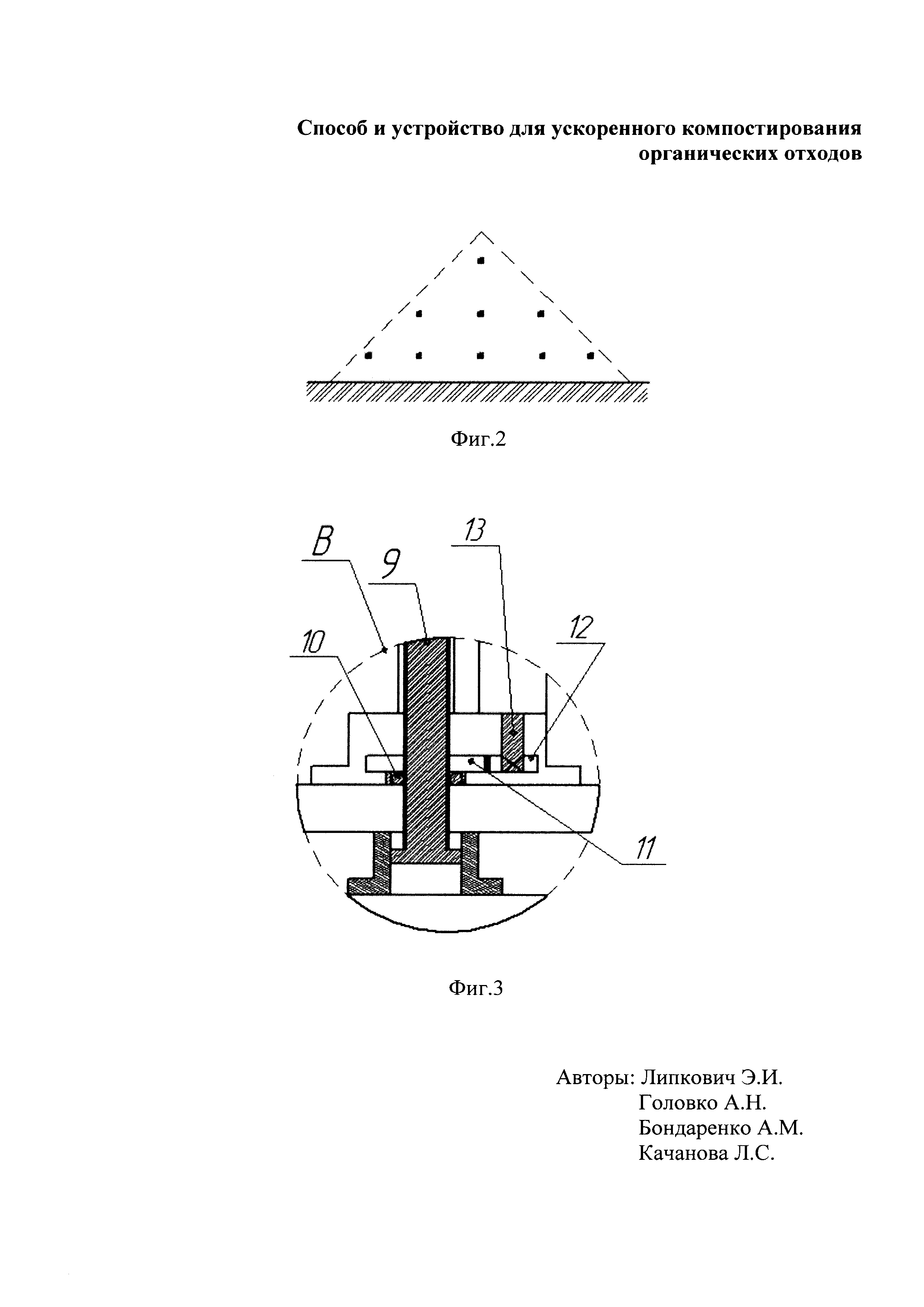
Устройство для реализации предлагаемого способа (фиг. 1) содержит установленную на корпусе 1 самоходного ворошителя буртов неподвижную раму 2, соединенную со сканирующей рамой 3 и механизмом перемещения рамы 4. Сканирующая рама 3 вынесена вперед по направлению движения самоходного ворошителя буртов на 2 метра, что позволяет сканировать температуру и влажность непосредственно в центре (ядре) навозного бурта. Сканирующая рама 3 состоит из поперечной планки 5 с жестко закрепленными на ней сканирующими стержнями 6 треугольной формы. На каждом сканирующем стержне 6 установлены датчики температуры 7 и датчики влажности 8 (фиг. 1, А-А), которые в рабочем состоянии при погружении сканирующих стержней 6 в навозный бурт, замеряют температуру и влажность в контрольных точках бурта, схема которых представлена на фиг. 2. В качестве датчиков влажности 8 применяются емкостные датчики, которые фиксируют изменение емкости при изменении влажности находящегося между пластинами датчика вещества. Подъем и опускание сканирующей рамы 3 осуществляется с помощью механизма перемещения рамы 4, расположенного в центре неподвижной рамы 2. Механизм перемещения рамы 4 (фиг. 3) состоит из неподвижного стержня 9 с резьбой, нижней частью закрепленного по центру подвижной сканирующей рамы 3. На неподвижном стержне 9 вращается на опорном подшипнике 10, установленном на неподвижной раме 2, шестерня 11, которая приводится в движение входящей в зацепление с ней шестерней 12 меньшего диаметра, закрепленной на валу реверсивного электродвигателя 27. Также на сканирующей раме расположены конечный выключатель верхнего положения 21 и конечный выключатель нижнего положения 22. Для предотвращения перекоса и разворота сканирующей рамы 3 при ее вертикальном перемещении предусмотрены две направляющие 14 и 15, закрепленные на сканирующей раме 3 и проходящие через отверстия в неподвижной раме 2. Стержень 9 защищен от влаги и пыли верхним 16 и нижним 17 телескопическими кожухами, один из которых при перемещении сканирующей рамки раскрывается, а другой закрывается. На неподвижной раме также закреплена пластина 23 с манжетами из эластичного вещества, лазерный излучатель 18 с одной стороны и оптический датчик приема лазерного луча 19 с другой. Возле рабочего места оператора ворошителя расположен бортовой компьютер 20. Система внесения биологически активной добавки содержит емкость 24, электромагнитный клапан 25 для регулирования доз БАД и форсунки для ее внесения 26.
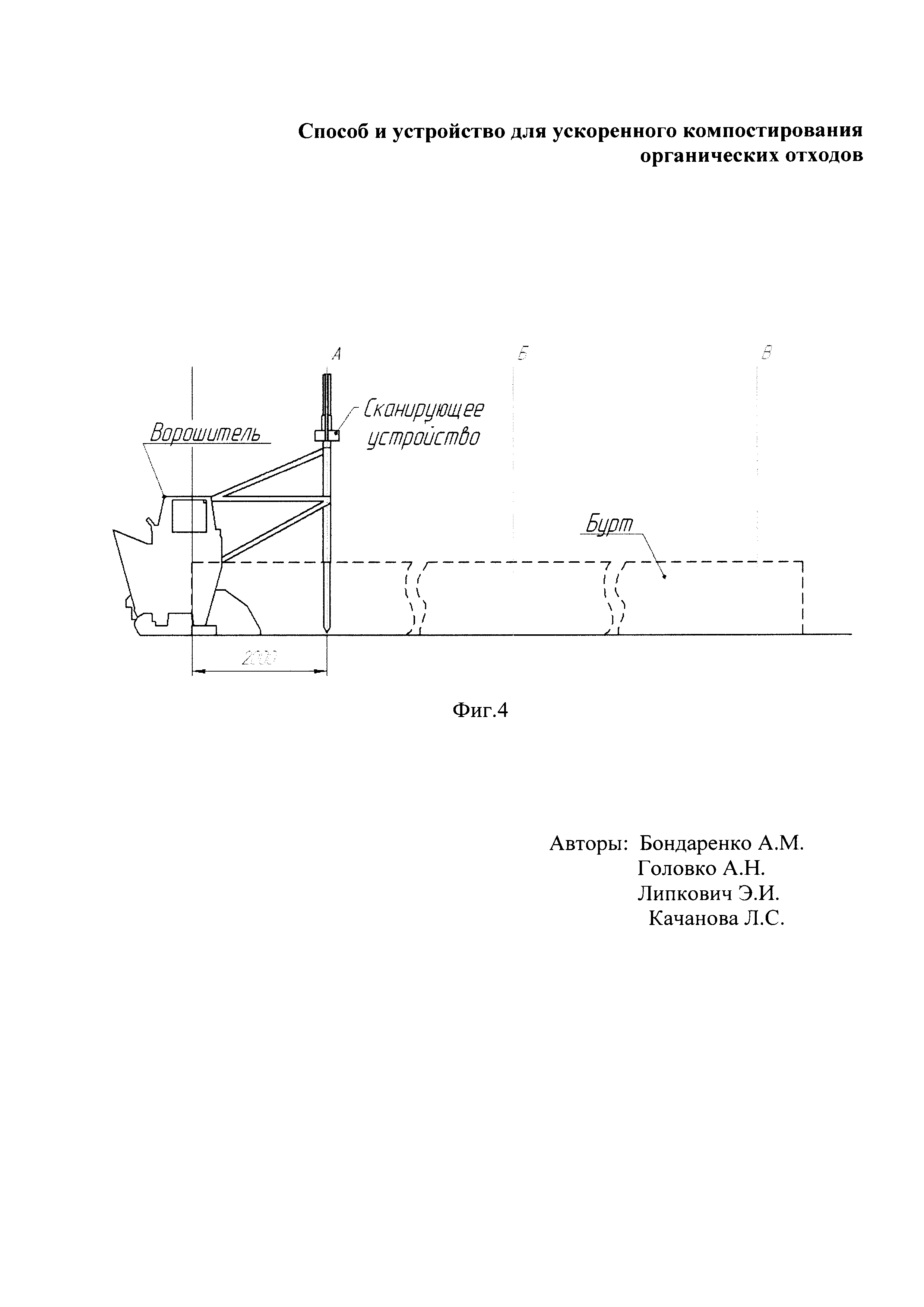
Предлагаемое устройство поясняется чертежами. На фиг. 1а показан самоходный ворошитель буртов с устройством в транспортном положении. На фиг. 1б показан самоходный ворошитель буртов с устройством в положении сканирования температуры и влажности бурта. На фиг. 2 показана схема контрольных точек сканирования навозного бурта. На фиг. 3 показан механизм подъема сканирующей рамы. На фиг. 4 схема прохода ворошителя буртов.
Предлагаемое устройство работает следующим образом.
Самоходный ворошитель буртов, управляемый оператором, подъезжает к контрольной точке А (фиг. 4) в начале бурта, край которого определяется перекрытием лазерного луча, излучаемого лазерным диодом 18. Оптический датчик приема лазерного луча 19 передает сигнал о соответствии положения сканирующего устройства контрольной точке замера. Бортовой компьютер 20, расположенный в кабине оператора, подает сигнал на включение электродвигателя 27 в режим опускания сканирующей рамы. На перемещающем механизме расположены конечный выключатель верхнего положения 21 и конечный выключатель нижнего положения 22 сканирующей рамы, подающие сигнал на бортовой компьютер об остановке механизма перемещения для предотвращения повреждения при движении вверх или заглублении сканирующих стержней ниже контрольных точек при движении вниз. После срабатывания конечного выключателя нижнего положения 22 бортовой компьютер запускает программу опроса датчиков температуры и влажности. После сохранения полученных значений температуры и влажности эти параметры привязываются координатно с помощью спутниковой системы связи Global Positionning Sistem ("В будущее с системой "Global Positioning Sistem (GPS). Проспект фирмы "Massey Fergusson") и с координатной привязкой записываются в память бортового компьютера. Бортовой компьютер подает сигнал на запуск вращения электродвигателя в направлении, соответствующем подъему сканирующей рамы. Для очистки сканирующих стержней 6 от остатков налипшего при сканировании навоза с целью исключения погрешностей при измерении, на неподвижной рамке жестко закреплена пластина 23 с манжетами из эластичного вещества. При срабатывании конечного выключателя верхнего положения 21 происходит отключение электродвигателя и сканирующая рама останавливается. Бортовой компьютер подает сигнал на перемещение самоходного ворошителя буртов к следующей контрольной точке Б (фиг. 4), расстояние до которой определяется координатно с помощью спутниковой системы связи (GPS) и процесс сканирования повторяется. Параллельно, при перемещении к следующей контрольной точке Б, самоходный ворошитель буртов производит перемешивание слоев бурта с повторным его формированием. Завершается процесс сканирования в точке В (фиг. 4). После завершения процесса сканирования с помощью программного обеспечения производится обработка полученных данных с целью определения сроков следующего сканирования и ворошения бурта, а также возможного внесения жидкой БАД.
После получения результата обработки данных сканирования, самоходный ворошитель буртов разворачивается, подходит к точке В с противоположной стороны бурта и начинает выполнять обратное перемещение, производя в соответствии с определенным программным обеспечением режимом ворошение бурта с возможным внесением БАД. В случае выбора режима внесения БАД электромагнитный клапан 25 для регулирования доз БАД, управляемый бортовым компьютером 20, включает подачу из емкости 24 биологически активной добавки, определенной программным обеспечением дозы, через форсунки для ее внесения 26.
Предлагаемое устройство ускоренного компостирования органических отходов позволяет многократно сократить процесс термического обеззараживания твердого навоза, что способствует снижению загрязнения органическими отходами животноводства окружающей среды и получить высококачественное концентрированное органическое удобрение.
Устройство ускоренного компостирования органических отходов, содержащее установленную на корпусе самоходного ворошителя буртов неподвижную раму, соединенную со сканирующей рамой и механизмом перемещения рамы, сканирующая рама состоит из поперечной планки с закрепленными на ней сканирующими стержнями, на каждом из которых установлены датчики температуры и влажности с привязкой координат сканирования по GPS технологии и занесением в бортовой компьютер, который в зависимости от полученных значений определяет необходимое количество доз внесения биологически активной добавки, способствующей ускоренному самонагреву бурта, и проходов ворошителя.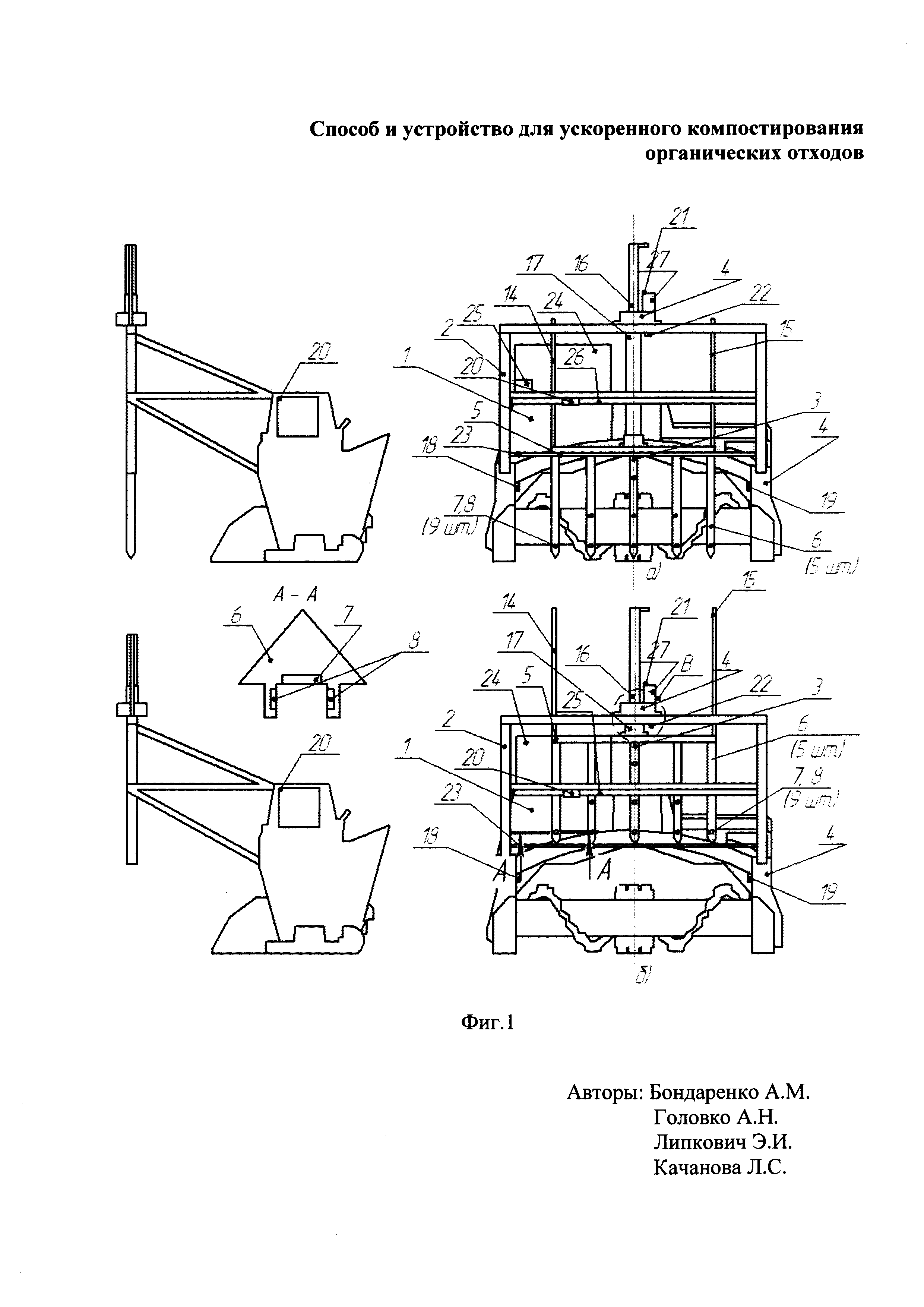
Полнопоточная центрифуга с вихревым приводом
Способ содержания сельскохозяйственной птицы при светодиодном динамическом освещении
Мембранно-вакуумный пресс
Пневматический высевающий аппарат
Пневмомеханический пресс для отжима сока
Трехосный прицеп
Гусеничный движитель
Летательный аппарат вертикального взлёта и посадки - "летающий мотоцикл"
Способ ускоренного компостирования органических отходов
Летательный аппарат вертикального взлёта и посадки - "летающий мотоцикл"

