Результат интеллектуальной деятельности: СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ
Вид РИД
Изобретение
Изобретение относится к области приборостроения и может быть использовано при создании навигационных комплексов, содержащих, помимо инерциальной навигационной системы (ИНС) с интегральной коррекцией от акселерометров, навигационные системы, определяющие навигационные параметры неинерциальными способами, например радиосистемы, электронные, одометрические и другие.
Известен способ демпфирования и сокращения периода шулеровских колебаний (принятый за прототип, патент на изобретение №2082098 от 20.06.1997) гироплатформы ИНС для уменьшения погрешностей в счислении текущего значения географических координат движущегося объекта с помощью коррекции ИНС от источника измерения текущей скорости объекта.
Недостатком данного прототипа является то, что в качестве датчика скорости рассматривается только одна навигационная система - спутниковая.
Задачей предлагаемого изобретения является повышение надежности системы коррекции, увеличение вероятности формирования корректирующего сигнала без сбоев в зависимости от сложившейся ситуации, способной ухудшить точностные характеристики корректирующих навигационных систем.
Технический результат достигается тем, что в способе коррекции инерциальной навигационной системы (ИНС), заключающемся в том, что ИНС корректируется внешней навигационной системой путем воздействия корректирующими сигналами на гироскопы гироблоков горизонтальных каналов ИНС с помощью датчиков момента, установленных на осях прецессии гироблоков ИНС, согласно изобретению с помощью вычислительного устройства комплексируют сигналы нескольких внешних корректирующих навигационных систем (КНС), для чего формируют сигналы текущего значения разностей сигналов горизонтальных составляющих линейной скорости объекта, измеренной ИНС и КНС, обнуляют сигналы, имеющие отрицательные значения, формируют сигналы текущего значения математического ожидания разностей сигналов (МОРС), формируют сигналы текущих значений меры истинности разностей скоростей с помощью функций принадлежности, взаимное положение которых определяют сигналы МОРС, формируют сигналы, характеризующие весовые соотношения сигналов разностей скоростей при комплексировании этих разностей, формируют текущее значение сигналов, соответствующих суммарной конфигурации весовых характеристик всех разностей скоростей, формируют сигналы комплексированных значений разностей скоростей, по которым формируют и подают текущие комплексированные сигналы коррекции на датчики момента гироблоков непосредственно и через интегральную коррекцию гироскопов в сумме с сигналами акселерометров.
В способе коррекции ИНС предполагается использование искусственного интеллекта на базе нечеткой логики, позволяющей учитывать степень истинности сигналов, вырабатываемых навигационными системами, чьи показания можно использовать для коррекции ИНС.
Эффективность коррекции (сокращение шулеровского периода колебаний платформы и сокращение постоянной затухания шулеровских колебаний) зависит от соотношения погрешности в определении скорости движения объекта с помощью ИНС в сравнении с погрешностью КНС.
Чем меньше погрешность корректирующей системы, тем эффективнее коррекция. В штатном режиме все корректирующие системы должны быть точнее корректируемой инерциальной.
Нештатный режим может вызвать в системе погрешности, которые не могут быть использованы для коррекции. Обнаружение нештатного режима плохо поддается анализу с помощью формальной логики. Решение этой проблемы находится с помощью нечетной логики, в частности с помощью применения алгоритма Мамдани (В.П. Дьяконов, В.В. Крутов. Инструменты искусственного интеллекта и биоинформатики, Москва, СОЛОН-ПРЕСС, 2006, стр. 187-191).
Устройство комплексирования корректирующих сигналов использует сигналы неинерциальных КНС заведомо более точных, чем сигнал ИНС, автоматически оценивая возможность использования и меру участия каждого сигнала в формировании корректирующего сигнала. Логический вывод такого сигнала подчиняется нечетким правилам алгоритма Мамдани, позволяя на базе нечетких чисел получить четкие значения сигнала, обеспечивающего эффективность коррекции.
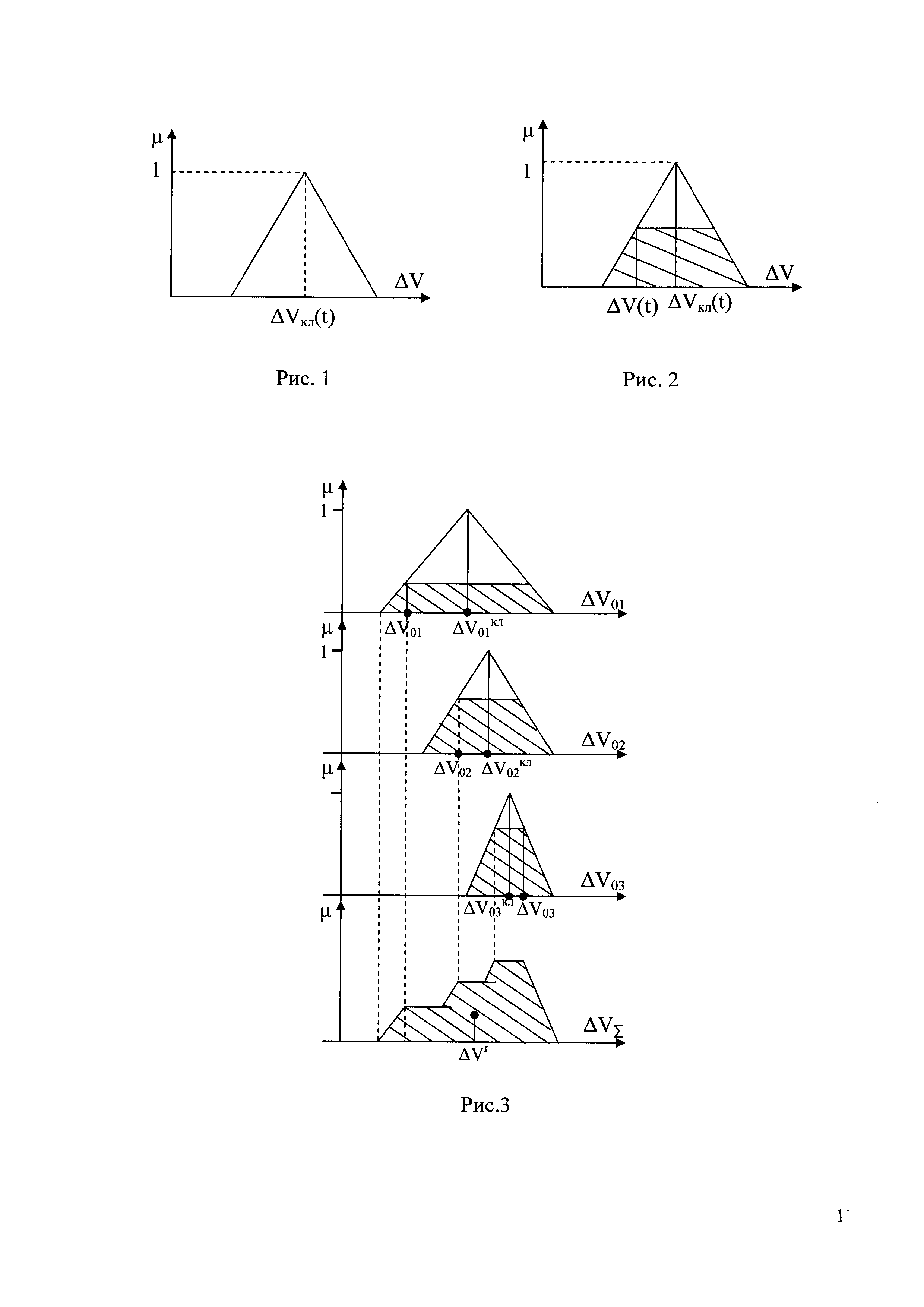
Для логического вывода необходимо иметь не только функции принадлежностей (рис. 1) для всех разностей, но и определять текущее положение центров функций принадлежностей, сопоставляя их с центрами кластеризации ΔVкл(t), т.е. с центрами, около которых группируются (скапливаются) экспериментальные данные.
Текущее значение ΔV(t) и ΔVкл(t) (рис. 2) дает возможность применить правило логического вывода под названием "операция минимум", в которой функция принадлежности отсекается по высоте, соответствующей вычисленной степени истинности предпосылки правила (нечеткая логика "И").
Следующий этап логического вывода носит название агрегирования, когда все нечеткие подмножества, назначенные к каждой переменной вывода, объединяются вместе операцией "максимум", а комбинированный вывод нечеткого подмножества конструируется как поточечный максимум по всем нечетким подмножествам (нечеткая логика "ИЛИ") (Рис. 3).
Этап последний называется дефазификацией или приведением к четкости, в результате чего нечеткий набор выводов преобразуется в четкое число ΔVΣr, например, как центр тяжести для полученной при агрегировании кривой μΣ(ΔVΣ). Полученное значение четкого сигнала является выразителем сигнала, полученного путем комплексирования разностей значений линейной скорости объекта, определенных в инерциальной системе и в системах, которые должны использоваться для коррекции инерциальной системы, т.е. сигнала, влияющего на поведение инерциальной гиросистемы, в результате чего уменьшается период колебаний гироплатформы в сравнении с периодом Шулера и колебания гироплатформы становятся затухающими. При этом инерциальная гиросистема сохраняет инвариантность по отношению к ускорениям объекта, на котором она установлена.
Алгоритм комплексирования сигналов коррекции должен быть построен таким образом, чтобы выбывали из рассмотрения сигналы навигационных систем, искажающих измеряемые параметры, что обеспечивается отключением сигналов навигационных систем от программы комплексирования, если сигнал несущий разность линейных скоростей, измеренных инерциальной и корректирующей системами, не попадает в "основании" треугольника функции принадлежности.
Комплексированная разность скоростей ΔVK с коэффициентом усиления К1 в сумме с сигналом датчика угла акселерометра подается на вход интегратора интегральной коррекции инерциальной системы (ИС), а с коэффициентом усиления К2 в сумме с сигналом интегральной коррекции подается на датчик момента гироблока.
В связи с тем, что комплексирование и коррекцию целесообразно осуществлять в оцифрованном виде, связь между инерциальной системой, навигационными системами (НС) с БЦВМ осуществляется с помощью преобразователей (Пр).
Коррекция от внешних источников информации о скорости движения объекта позволяет, как показывают результаты моделирования, в несколько раз сократить период колебаний Шулера, сделать колебания затухающими, в результате чего уменьшаются погрешности в счислении текущей широты и долготы объекта на порядок.
Комплексирование предполагает совместную обработку сигналов различных систем. В рассматриваемом случае предполагается комплексирование сигналов неинерциальных систем для получения сигнала, который можно использовать для коррекции инерциальной системы, изменяющей динамику работы инерциальной системы, в результате чего инерциальная система становится более точной. Сигнал инерциальной системы не используется при совместной обработке сигналов всех систем для их комплексирования, но он используется для получения разностей между сигналом инерциальной системы и сигналами участвующих в комплексировании систем. Иными словами, сигнал инерциальной системы участвует в комплексировании нетрадиционной системы комплексирования "равноправных" сигналов, а как критерий необходимости системы для улучшения точности последней, но в обработке сигналов участвуют все корректирующие системы и системы корректируемые, поэтому систему подобной совместной обработки сигналов может было бы назвать системой комплексирования инерциальной системы навигации.
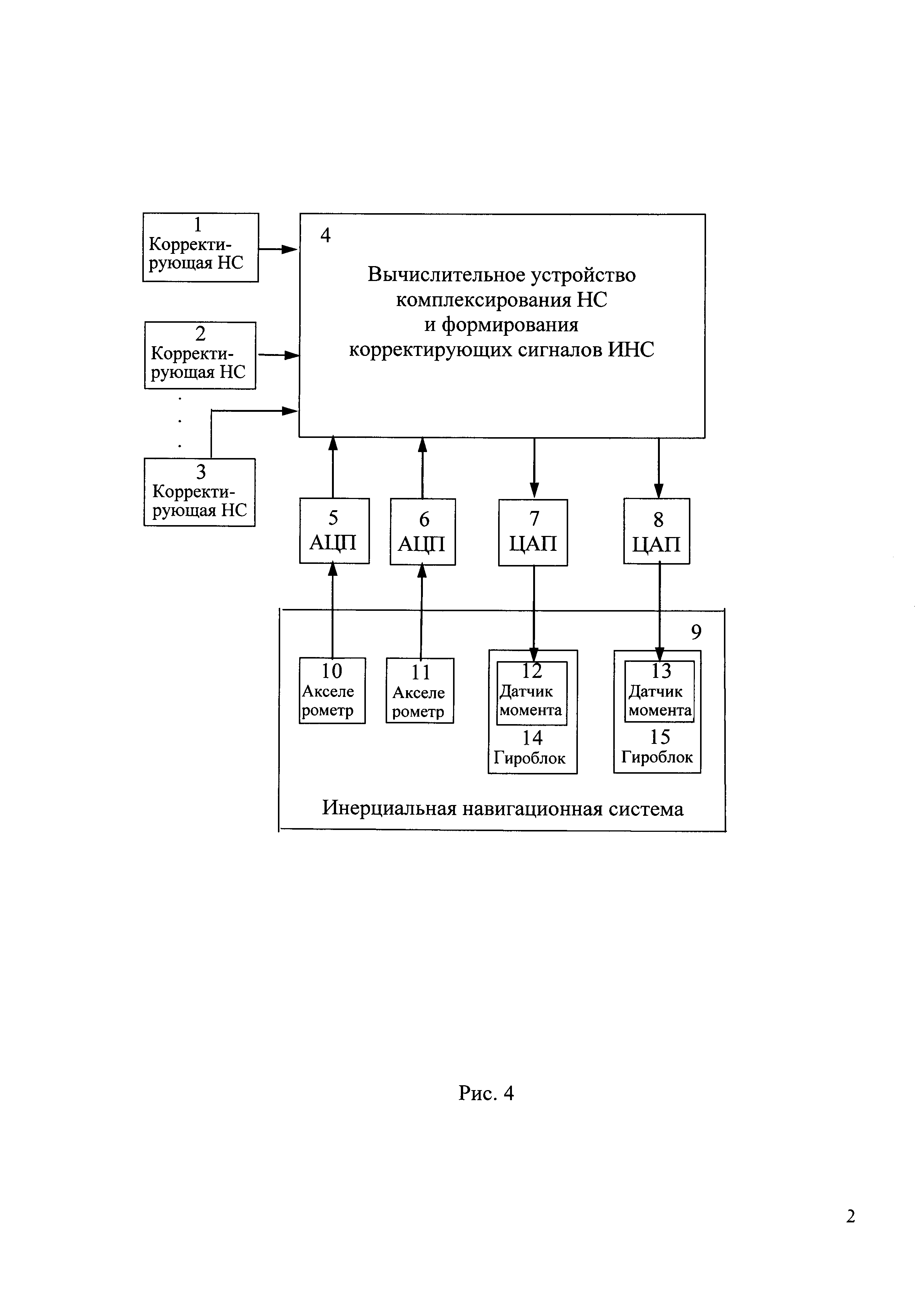
На рис. 4 представлена структурная схема коррекции одного из каналов инерциальной системы ("северный" канал)
Посредством вычислительного устройства выполняют:
- определяются разности ΔVi в показании линейной скорости объекта, полученные от инерциальной системы (ИС) и навигационных систем (НС) Vi
ΔVi=V-Vi=δV-δVi,
δV и δVi, - погрешности инерциальной и навигационных систем.
- значения ΔVi<0 выводятся из дальнейшего рассмотрения (обнуляются).
- определяется положение для каждой разности скоростей путем определения текущего значения математического ожидания разности скоростей M(ΔVi).
- определяется текущее значение меры истинности каждой разности с помощью текущего состояния функции принадлежности.
- производится поточечное суммирование (агрегирование) текущих состояний функций принадлежности.
- определяется центр тяжести полученной кривой от суммирования функций принадлежности и соответствующее ему четкое значение комплексированного значения разности ΔVK.
Параметры функций принадлежности определяются с помощью экспертных оценок точностных характеристик навигационных систем путем статического анализа телеметрических данных.
На рис. 4 изображена структурная схема системы коррекции инерциальной навигационной системы. На схеме: 1, 2, 3 - корректирующие навигационные системы, 4 - вычислительное устройство комплексирования НС и формирования корректирующих сигналов ИНС, 5, 6 - АЦП, 7, 8 - ЦАП, 9 - ИНС, 10, 11 - акселерометры, 12, 13 - датчики момента, 14, 15 - гироблоки.
Особенностью изобретения является предварительное комплексирование сигналов корректирующих навигационных систем.
Комплексирование осуществляется на уровне разностей линейных скоростей, полученных от ИНС и КНС. Поэтому сначала определяются текущее значение разностей линейной скорости объекта, измеренной ИНС, и линейных скоростей, измеренных КНС. Как не имеющие смысла для дальнейшего использования значения разностей, имеющие отрицательные значения, обнуляются и, таким образом, выводятся из рассмотрения. Затем определяются текущие значения математического ожидания полученных разностей для определения местоположения центров функций принадлежности сигналов. С помощью функций принадлежности определяется мера истинности для каждого из сигналов - носителей разности скоростей, после чего изменяется конфигурация функций принадлежности. Для новых конфигураций функций принадлежности путем поточечного суммирования находится суммарная конфигурация для всех функций принадлежности, "центр тяжести" которой дает возможность определить значение комплексированного корректирующего сигнала.
Таким образом, заявлен способ коррекции инерциальной навигационной системы (ИНС), заключающийся в том, что ИНС корректируется внешней навигационной системой путем воздействия корректирующими сигналами на гироскопы гироблоков горизонтальных каналов ИНС с помощью датчиков момента, установленных на осях прецессии гироблоков ИНС. Отличительная особенность способа заключается в том, что с помощью вычислительного устройства комплексируют сигналы нескольких внешних корректирующих навигационных систем (КНС), для чего формируют сигналы текущего значения разностей сигналов горизонтальных составляющих линейной скорости объекта, измеренной ИНС и КНС, обнуляют сигналы, имеющие отрицательные значения, формируют сигналы текущего значения математического ожидания разностей сигналов (МОРС), формируют сигналы текущих значений меры истинности разностей скоростей с помощью функций принадлежности, взаимное положение которых определяют сигналы МОРС, формируют сигналы характеризующие весовые соотношения сигналов разностей скоростей при комплексировании этих разностей, формируют текущее значение сигналов, соответствующих суммарной конфигурации весовых характеристик всех разностей скоростей, формируют сигналы комплексированных значений разностей скоростей, по которым формируют и подают текущие комплексированные сигналы коррекции на датчики момента гироблоков непосредственно и через интегральную коррекцию гироскопов в сумме с сигналами акселерометров.
Способ коррекции инерциальной навигационной системы (ИНС), заключающийся в том, что ИНС корректируется внешней навигационной системой путем воздействия корректирующими сигналами на гироскопы гироблоков горизонтальных каналов ИНС с помощью датчиков момента, установленных на осях прецессии гироблоков ИНС, отличающийся тем, что с помощью вычислительного устройства комплексируют сигналы нескольких внешних корректирующих навигационных систем (КНС), для чего формируют сигналы текущего значения разностей сигналов горизонтальных составляющих линейной скорости объекта, измеренной ИНС и КНС, обнуляют сигналы, имеющие отрицательные значения, формируют сигналы текущего значения математического ожидания разностей сигналов (МОРС), формируют сигналы текущих значений меры истинности разностей скоростей с помощью функций принадлежности, взаимное положение которых определяют сигналы МОРС, формируют сигналы, характеризующие весовые соотношения сигналов разностей скоростей при комплексировании этих разностей, формируют текущее значение сигналов, соответствующих суммарной конфигурации весовых характеристик всех разностей скоростей, формируют сигналы комплексированных значений разностей скоростей, по которым формируют и подают текущие комплексированные сигналы коррекции на датчики момента гироблоков непосредственно и через интегральную коррекцию гироскопов в сумме с сигналами акселерометров.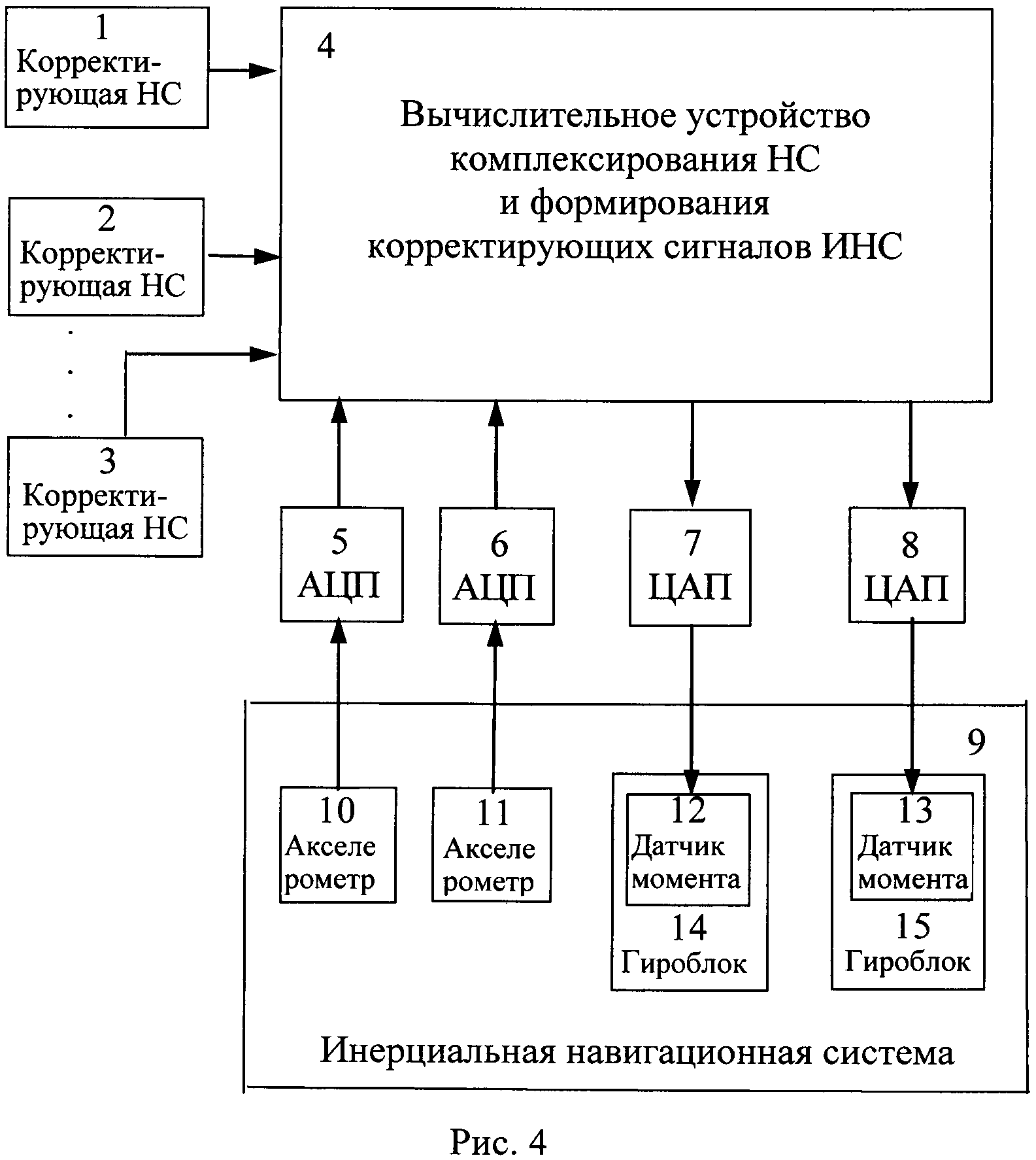
Способ определения параметров прецизионного кварцевого маятникового акселерометра
Преобразователь угла поворота вала в код
Многоканальный кварцевый генератор
Формирователь установочного импульса
Устройство контроля протекания тока
Безобогревной термоинвариантный электромеханический поплавковый измеритель угловой скорости
Склеивающая прокладка сфг
Способ увеличения диапазона углов поворота изделия относительно гиростабилизированной платформы, установленной на изделии в карданновом подвесе
Способ настройки вентильного электродвигателя
Компенсационный маятниковый акселерометр
Дефектоскоп для контроля рельсов
Способ калибровки чувствительных элементов бесплатформенной инерциальной навигационной системы и устройство для его осуществления
Мобильный диагностический комплекс
Щелевая антенна с поглощающим покрытием, содержащим наноструктурированные проводящие нити из полуметаллов
Регулирующий клапан
Способ однозначной первичной дальнометрии группы целей на фоне узкополосных пассивных помех в режиме высокой частоты повторения импульсов зондирующего сигнала
Прямоточный регулирующий клапан

