Результат интеллектуальной деятельности: СПОСОБ УВЕЛИЧЕНИЯ ДИАПАЗОНА УГЛОВ ПОВОРОТА ИЗДЕЛИЯ ОТНОСИТЕЛЬНО ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ, УСТАНОВЛЕННОЙ НА ИЗДЕЛИИ В КАРДАННОВОМ ПОДВЕСЕ
Вид РИД
Изобретение
Изобретение относится к области приборостроения и может быть использовано при разработке ракетных и самолетных инерциальных систем управления с применением гиростабилизированных платформ (ГСП), установленных в кардановом подвесе на изделии.
Основу систем управления составляет комплекс командных приборов (ККП) с применением трехосных ГСП, на которых расположены чувствительные элементы (ЧЭ) (акселерометры и гироблоки). На осях трехосного подвеса установлены двигатели силовой стабилизации (ДС) ГСП и датчики углов (ДУ), по информации которых определяется угловая ориентация изделия относительно системы координат, связанной с ГСП. По информации ККП можно определить угловую ориентацию и линейное перемещение центра масс изделия относительно инерциального пространства.
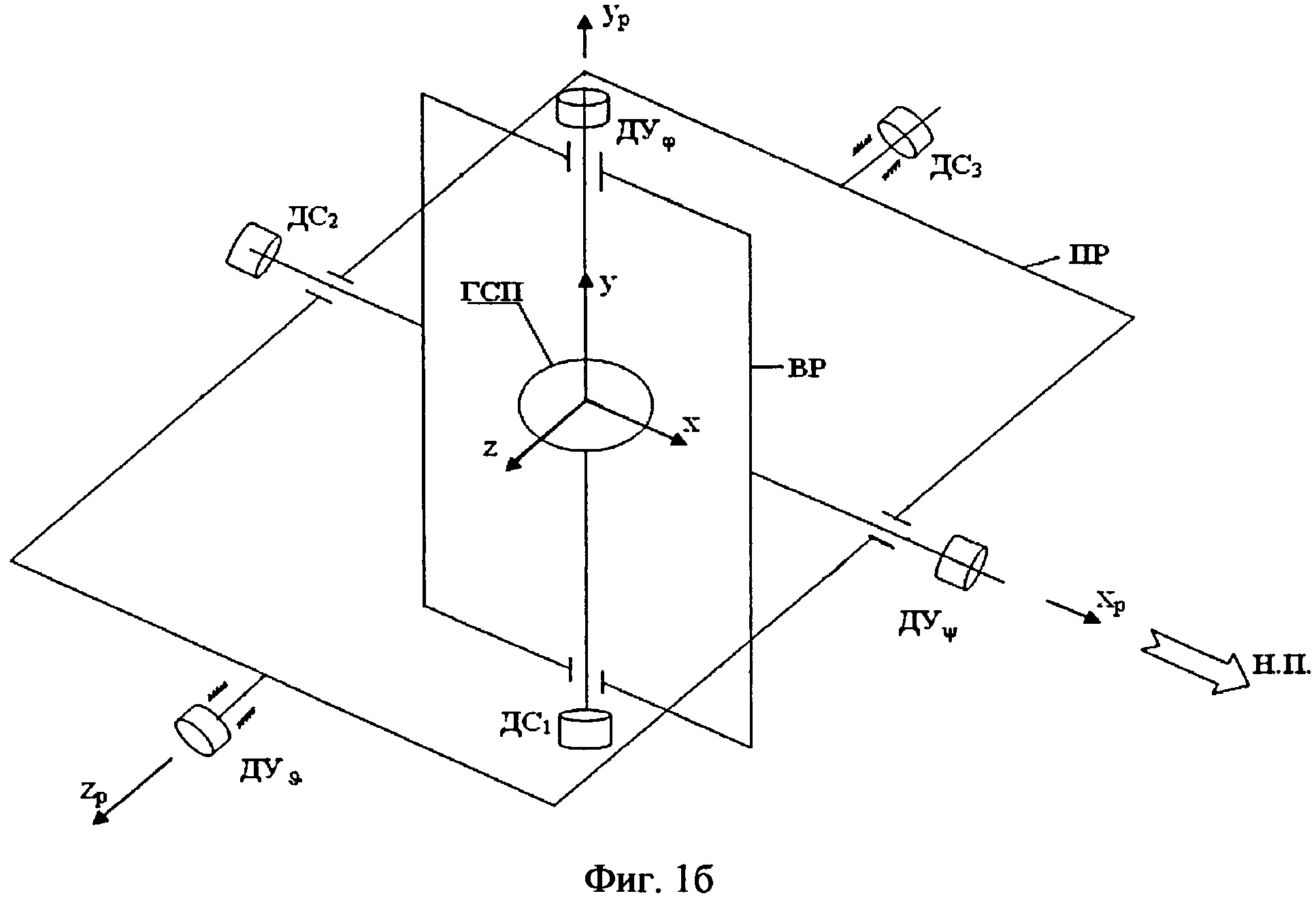
Ориентацию системы координат OXPYPZP, связанной с ракетой, относительно системы координат OXYZ, связанной с ГСП, принято определять через «ракетные» углы φP, ψP, υP, которые называются углами азимута, крена и тангажа.
Последовательность поворота φP→ψP→υP показаны на фиг.1а, а кинематическая схема карданова подвеса с ДУ и ДС показана на фиг.1б.
Ориентацию системы координат OXCYCZC, связанной с самолетом, принято определять через «самолетные» углы ψC, υC, φC, которые называются углами рыскания, тангажа и крена.
Последовательность поворотов ψC→υC→φC показана на фиг.2а. Кинематическая схема карданова подвеса с ДУ и ДС показана на фиг.2б.
Углы поворота изделия (ракеты, самолета) вместе с кардановым подвесом относительно ГСП вокруг внутренней оси подвеса (ось азимута для «ракетных» и ось рыскания для «самолетных» углов), а также вокруг наружной оси подвеса (ось тангажа для «ракетных» и ось вращения для «самолетных» углов) практически не ограничены и могут изменяться в диапазоне ±360°. Углы разворота изделия по промежуточной оси подвеса (ось крена для «ракетных» углов и ось тангажа для «самолетных» углов) ограничены и не должны превышать пределов ±70° от исходного «нулевого» положения вследствие эффекта «сложения рам».
При «сложении рам» оси двигателей стабилизации ГСП, установленные на внутренней и наружной осях трехосного подвеса, складываются, и ГСП выходит из строя, а угловая ориентация изделия не может быть определена.
Для увеличения диапазона рабочих углов поворота ЛА относительно инерциального пространства используется четырехосный подвес. В известных схемах четырехосных подвесов «для нормального функционирования ГСП при любых эволюциях ЛА вводят дополнительную следящую раму (ДР), ось вращения которой в исходном положении совпадает с осью средней рамы ГСП. Однако даже при введении ДР существуют такие маневры ЛА, при которых может произойти нарушение нормальной работы ГСП.» (Индикаторные гироскопические платформы. Под редакцией д-ра техн. наук, проф. А.Д. Александрова. М., Машиностроение. 1979 г. - Стр.9).
Предлагаемый способ позволяет избежать этих недостатков и увеличить углы поворота вокруг всех трех осей поворота изделия: продольной (ось вращения), поперечной (ось тангажа) и вертикальной (ось рыскания или азимута) путем автоматического перевода трехосного карданова подвеса из режима работы с «ракетными» углами ориентации изделия относительно ГСП в режим работы трехосного карданова подвеса с «самолетными» углами ориентации изделия, а также обратного перехода от «самолетных» углов к «ракетным» углам необходимое количество раз.
При этом не изменяется съем информации с датчиков углов, установленных на осях карданова подвеса. Не изменяется и работа системы силовой стабилизации ГСП. Это достигается тем, что двигатель механизма поворота рам (ДМР) карданова подвеса, имеющий редуктор с пониженной передачей, для перехода от «ракетных» углов к «самолетным» и обратно устанавливают на дополнительной наружной раме (HP) карданова подвеса, который разворачивают кратковременно (1-2 с) относительно ЛА на угол θ4 от нуля до ±90° и обратно от ±90° и до нуля. Других особых требований к двигателю ДМР не предъявляется. Угол поворота дополнительной рамы ограничен. Эта рама может иметь различное конструктивное исполнение, минимизирующее вес и габариты прибора.
После поворота рам через редуктор с пониженной передачей ДМР работает в режиме торможения (отключен), а четырехосный подвес продолжит работать как трехосный, не меняя связи между гироблоками ГСП и двигателями стабилизации, установленными на осях трехосного подвеса.
Схема карданова подвеса для автоматического перевода трехосного подвеса из режима работы с «ракетными» углами в режим работы с «самолетными» углами и обратно показана на фиг.3.
На фиг.3 дополнительная (четвертая) рама является наружной рамой карданова подвеса ГСП. Ось вращения дополнительной рамы устанавливают коллинеарно вертикальной оси ЛА. При неработающем двигателе ДМР в исходном положении, когда угол θ4=0, четырехосный подвес превращается в трехосный подвес с «ракетными» углами с признаком «ракета», при этом наружная ось полученного трехосного подвеса совпадает с поперечной осью изделия (ось тангажа изделия).
Этот трехосный подвес имеет «неграничные» углы прокачки по внутренней (азимутальная ось) и наружной (тангажная ось) осям карданова подвеса и имеет ограниченный угол прокачки по промежуточной оси, которая совпадает с осью вращения изделия.
Если требуется большой угол поворота изделия вокруг продольной оси, то надо развернуть дополнительную раму вокруг вертикальной оси (ось OYH) на 90° против или на -90° по часовой стрелке. Тогда ось OZ3 совпадет с продольной осью ОХИ изделия, и при неработающем двигателе ДМР четырехосный подвес превратится в трехосный подвес с «самолетными» углами с признаком «самолет». Этот трехосный подвес допускает «неограниченный» поворот вокруг внутренней (ось рыскания) и наружной (ось вращения) изделия и ограниченный угол прокачки вокруг промежуточной оси подвеса (ось тангажа изделия).
При обратном повороте дополнительной рамы вокруг вертикальной оси на угол 90° против или на -90° по часовой стрелке трехосный подвес с «самолетными» углами с признаком «самолет» снова превращается в трехосный подвес с «ракетными» углами и признаком «ракета».
При переходе от «ракетных» углов к «самолетным» углам и обратно необходимо иметь в виду, что также меняются местами ограничения на разворот изделия вокруг осей «вращения» и «тангажа».
Переход от «ракетных» углов к «самолетным» и обратно должен осуществляться, когда углы по тангажу и вращению одновременно не превышают пределов ±70°. Процесс перехода осуществляется за время не более 1-2 с. На дополнительной оси подвеса установлен датчик угла ДУ θ4, который фиксирует переход от «ракетных» углов к «самолетным» и обратно автоматически, и при развороте сохраняется информация об угловом положении изделия относительно ГСП.
Двигатели силовой стабилизации работают в прежнем режиме. «Автоматическое» преобразование сигналов с датчиков углов прецессии ГСП на двигатели ДС происходит через синусно-косинусный преобразователь угла, который обычно устанавливают на внутренней оси трехосного карданова подвеса, или такое преобразование может осуществляться в вычислительном устройстве.
При выключенном двигателе ДМР на углах θ4=0° и θ4=±90° для повышения надежности наружная ось трехосного гиростабилизатора должна быть зафиксирована относительно корпуса прибора.
Таким образом, предлагаемый способ увеличения диапазона углов поворота изделия относительно ГСП, установленной на изделии в кардановом подвесе, имеет отличительную особенность в том, что трехосный карданов подвес с «ракетными» углами ориентации изделия относительно ГСП, когда недостаточны углы прокачки вокруг продольной оси изделия, по сигналу от вычислительного устройства на двигатель механизма разворота автоматически переводят из режима работы с «ракетными» углами ориентации изделия относительно ГСП в режим работы трехосного карданова подвеса с «самолетными» углами ориентации изделия, а также обратно переводят из режима работы с «самолетными» углами в режим работы с «ракетными» углами, когда необходимы большие углы прокачки вокруг поперечной оси изделия, для этого наружную ось трехосного подвеса устанавливают в дополнительную рамку, которую с помощью двигателя механизма разворота поворачивают вокруг вертикальной оси изделия на угол θ4 от нуля до ±90° и обратно от ±90° до нуля необходимое число раз. Угол поворота определяют по показаниям датчика угла, который устанавливают на оси дополнительной рамы.
При неработающем двигателе ДМР в положении, когда угол θ4=0, четырехосный подвес работает в режиме трехосного подвеса с «ракетными» углами и признаком «ракета», наружная ось полученного трехосного подвеса совпадает с поперечной осью изделия, а подвес имеет ограниченный угол прокачки по оси вращения изделия и неограниченные углы прокачки по двум другим осям изделия.
При неработающем двигателе ДМР, когда угол θ4=±90°, четырехосный подвес работает в режиме трехосного подвеса с «самолетными» углами с признаком «самолет», наружная ось полученного трехосного подвеса совпадает с продольной осью изделия, а подвес имеет ограниченный угол прокачки по оси тангажа и неограниченные углы прокачки по двум другим осям.
Техническими результатами предлагаемого способа являются:
- совмещение в одном приборе функций двух приборов: определение «ракетных» и «самолетных» углов ориентации изделия, используя предлагаемый механизм разворота рам карданова подвеса;
- улучшение технических характеристик изделия: повышение маневренности изделия, экономия энергетики;
- простая схема переключения прибора из режима работы с «ракетными» углами в режим работы с «самолетными» углами и обратно;
- стабилизация ГСП не изменяется и работает в режиме трехосного стабилизатора.
Способ увеличения диапазона углов поворота изделия относительно гиростабилизированной платформы (ГСП), установленной на изделии в кардановом подвесе, отличающийся тем, что трехосный карданов подвес с «ракетными» углами ориентации изделия относительно ГСП, когда недостаточны углы прокачки вокруг продольной оси изделия, по сигналу от вычислительного устройства автоматически переводят из режима работы с «ракетными» углами ориентации изделия относительно ГСП в режим работы трехосного карданова подвеса с «самолетными» углами ориентации изделия, а также обратно переводят из режима работы с «самолетными» углами в режим работы с «ракетными» углами, когда необходимы большие углы прокачки вокруг поперечной оси изделия, для этого наружную ось трехосного подвеса устанавливают в дополнительную раму, которую с помощью двигателя механизма разворота поворачивают вокруг вертикальной оси изделия на угол θ от нуля до ±90° и обратно от ±90° до нуля необходимое число раз, угол поворота определяют по показаниям датчика угла, который устанавливают на ось дополнительной рамы.
Способ калибровки чувствительных элементов бесплатформенной инерциальной навигационной системы в полете
Многоканальный преобразователь напряжений в шим-сигналы
Волоконно-оптический измеритель угловой скорости
Способ определения параметров модели погрешностей измерений акселерометров инерциальной навигационной системы по измерениям спутниковой навигации
Способ определения параметров модели погрешностей измерений акселерометров ведомой инерциальной навигационной системы по измерениям эталонной инерциальной навигационной системы
Приемопередатчик последовательного интерфейса с элементом гальванической развязки
Стенд для измерения вибрационных реактивных моментов гиромотора
Термоинвариантный измеритель линейного ускорения
Формирователь временных интервалов
Порошковый композиционный материал акп-1пк и способ его получения
Способ калибровки чувствительных элементов бесплатформенной инерциальной навигационной системы в полете
Многоканальный преобразователь напряжений в шим-сигналы
Волоконно-оптический измеритель угловой скорости
Способ определения параметров модели погрешностей измерений акселерометров инерциальной навигационной системы по измерениям спутниковой навигации
Способ определения параметров модели погрешностей измерений акселерометров ведомой инерциальной навигационной системы по измерениям эталонной инерциальной навигационной системы
Приемопередатчик последовательного интерфейса с элементом гальванической развязки
Стенд для измерения вибрационных реактивных моментов гиромотора
Термоинвариантный измеритель линейного ускорения
Формирователь временных интервалов
Порошковый композиционный материал акп-1пк и способ его получения

