Результат интеллектуальной деятельности: УСТРОЙСТВО И СПОСОБ ПРОВЕРКИ ПЕРИФЕРИЙНОЙ ИНФОРМАЦИИ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству и способу проверки периферийной информации транспортного средства, которые применяются к транспортному средству, имеющему функцию автономного вождения.
Уровень техники
[0002] Традиционно известна технология отображения в символической форме обстановки движения рассматриваемого транспортного средства на основе условий движения рассматриваемого транспортного средства и информации о препятствиях на периферии рассматриваемого транспортного средства (патентная литература 1). В патентной литературе 1 преобразование символизированной обстановки движения прогнозируется, чтобы определять операции вождения.
Список упоминаний патентной литературы
[0003] Патентная литература 1: Публикация японской патентной заявки № 2013-242615
Сущность изобретения
Техническая проблема
[0004] Когда технология из патентной литературы 1 применяется к автономному вождению, символизированная обстановка движения значительно отличается от фактической обстановки движения, и очень точное автономное вождение, таким образом, может быть затруднительно выполнять.
[0005] Настоящее изобретение было реализовано, принимая во внимание вышеупомянутую проблему, и его целью является предоставление устройства и способа проверки периферийной информации транспортного средства, которые могут успешно выполнять очень точное автономное вождение посредством размещения препятствия на карте, чтобы получать обстановку движения, близкую к фактической, и обнаружения расхождения, которое может возникать, когда препятствие размещено на карте.
Решение проблемы
[0006] Устройство проверки периферийной информации транспортного средства согласно варианту осуществления настоящего изобретения обнаруживает препятствие, присутствующее на периферии рассматриваемого транспортного средства, размещает область с возможностью проезда, в которой транспортное средство имеет возможность двигаться, и обнаруженное препятствие на карте, определяет действие рассматриваемого транспортного средства с помощью информации о размещенном препятствии, оценивает, размещено ли размещенное препятствие в области с возможностью проезда, самостоятельно запрещает определять действие рассматриваемого транспортного средства с помощью информации о препятствии, когда препятствие определяется как неразмещенное в области с возможностью проезда.
Краткое описание чертежей
[0007] [Фиг. 1]
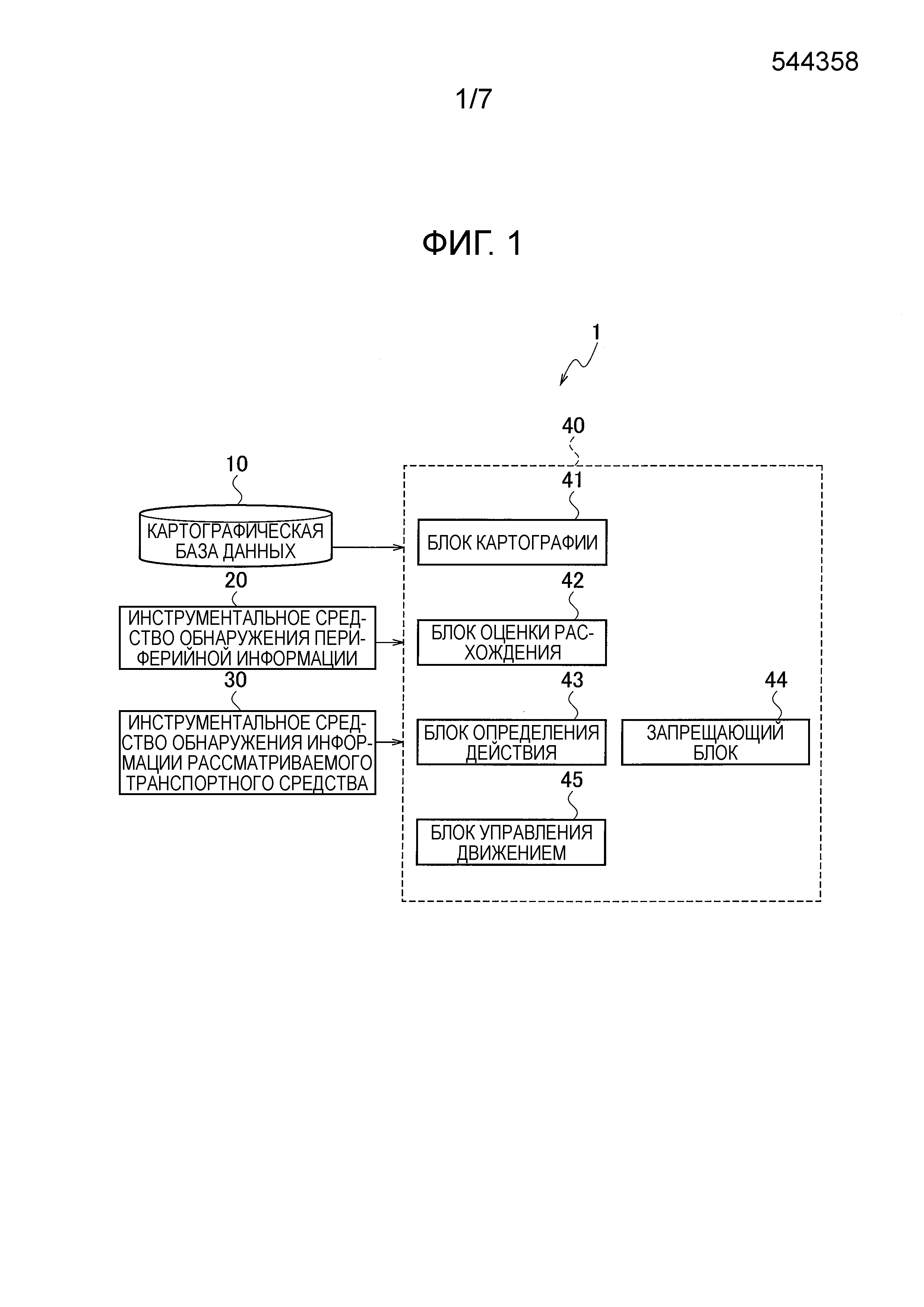
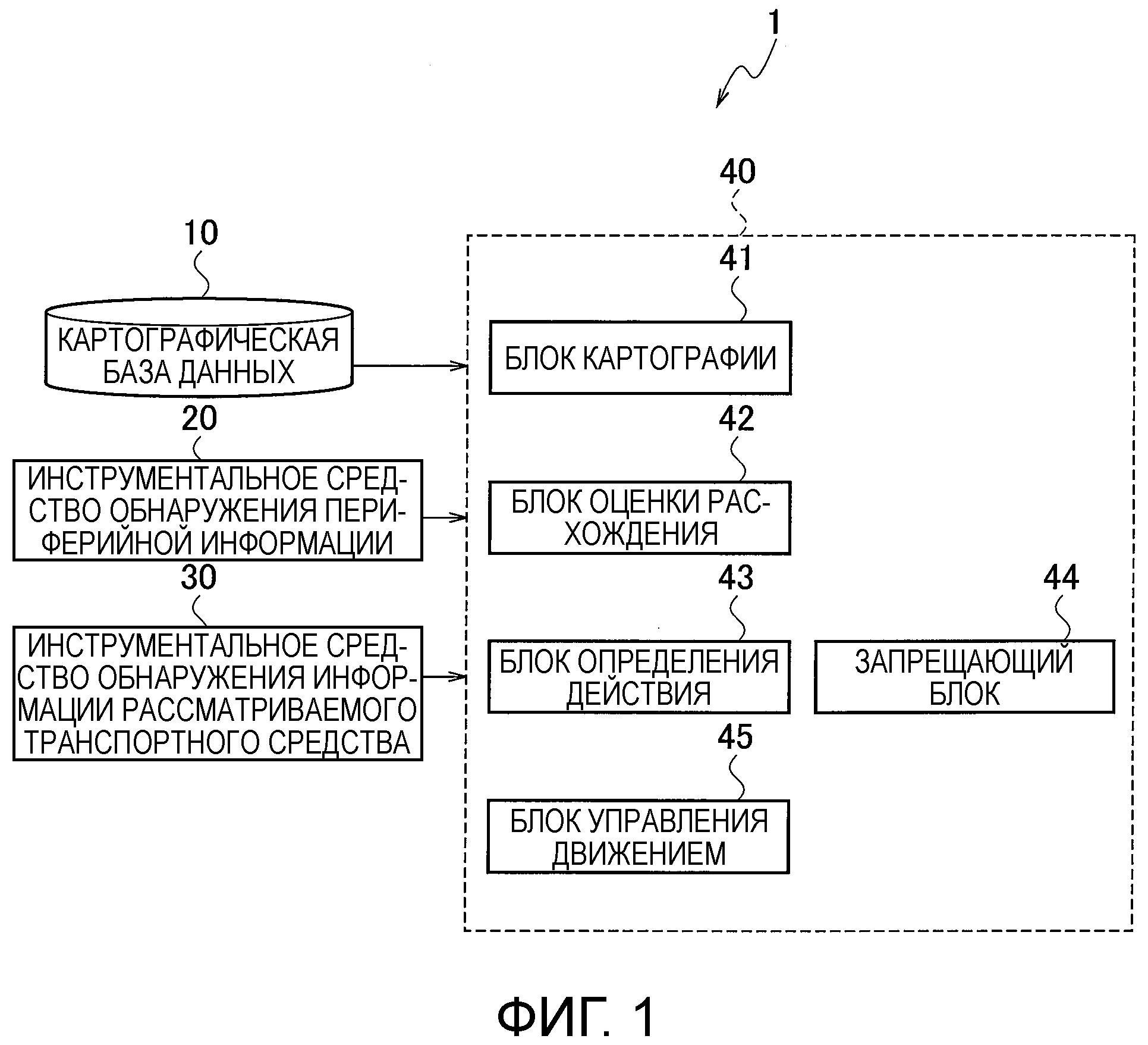
Фиг. 1 - это схема конфигурации устройства проверки периферийной информации транспортного средства согласно варианту осуществления настоящего изобретения.
[Фиг. 2]
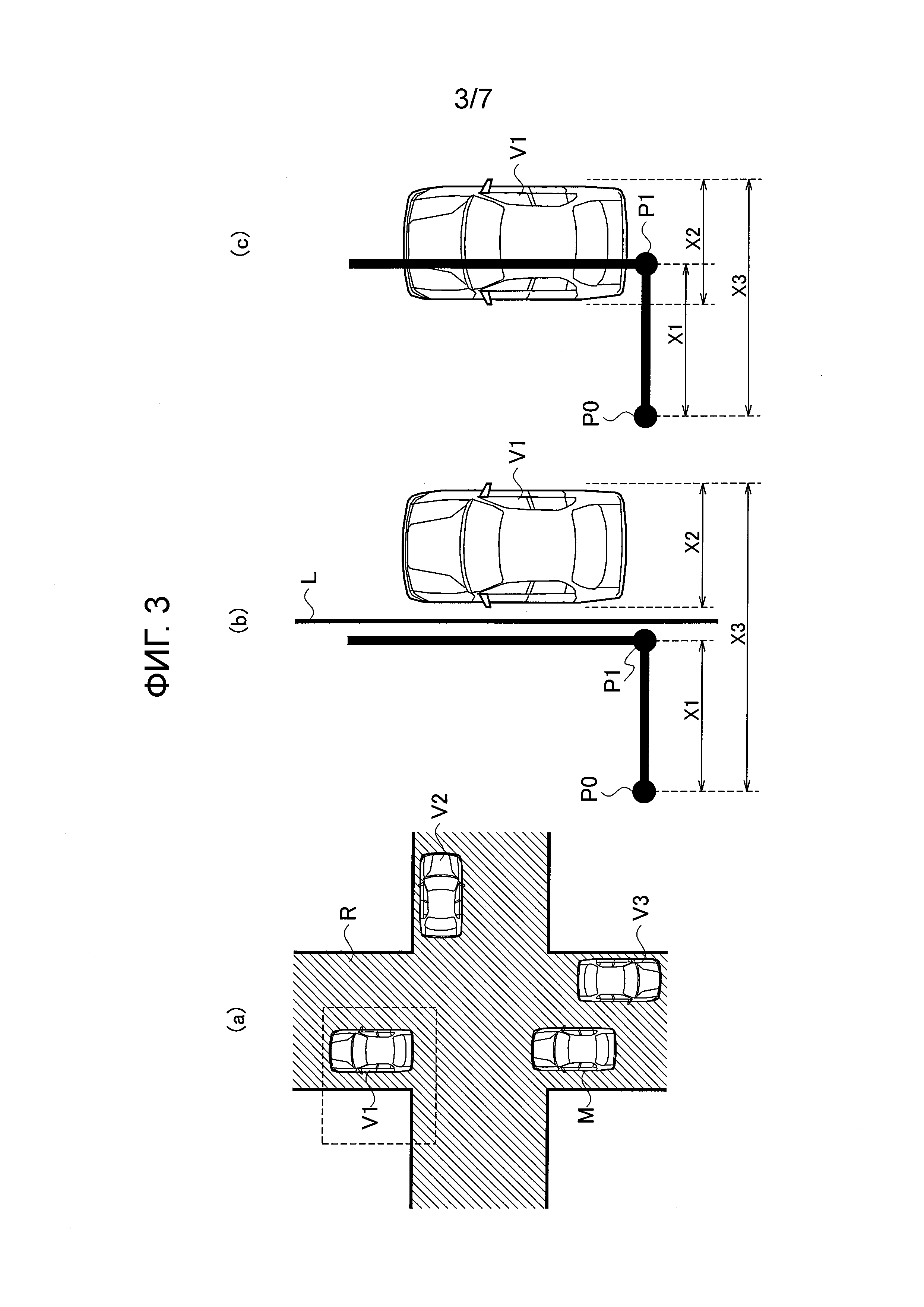
Части (a) и (b) на фиг. 2 - это виды, на которых область с возможностью проезда и транспортные средства размещаются на карте.
[Фиг. 3]
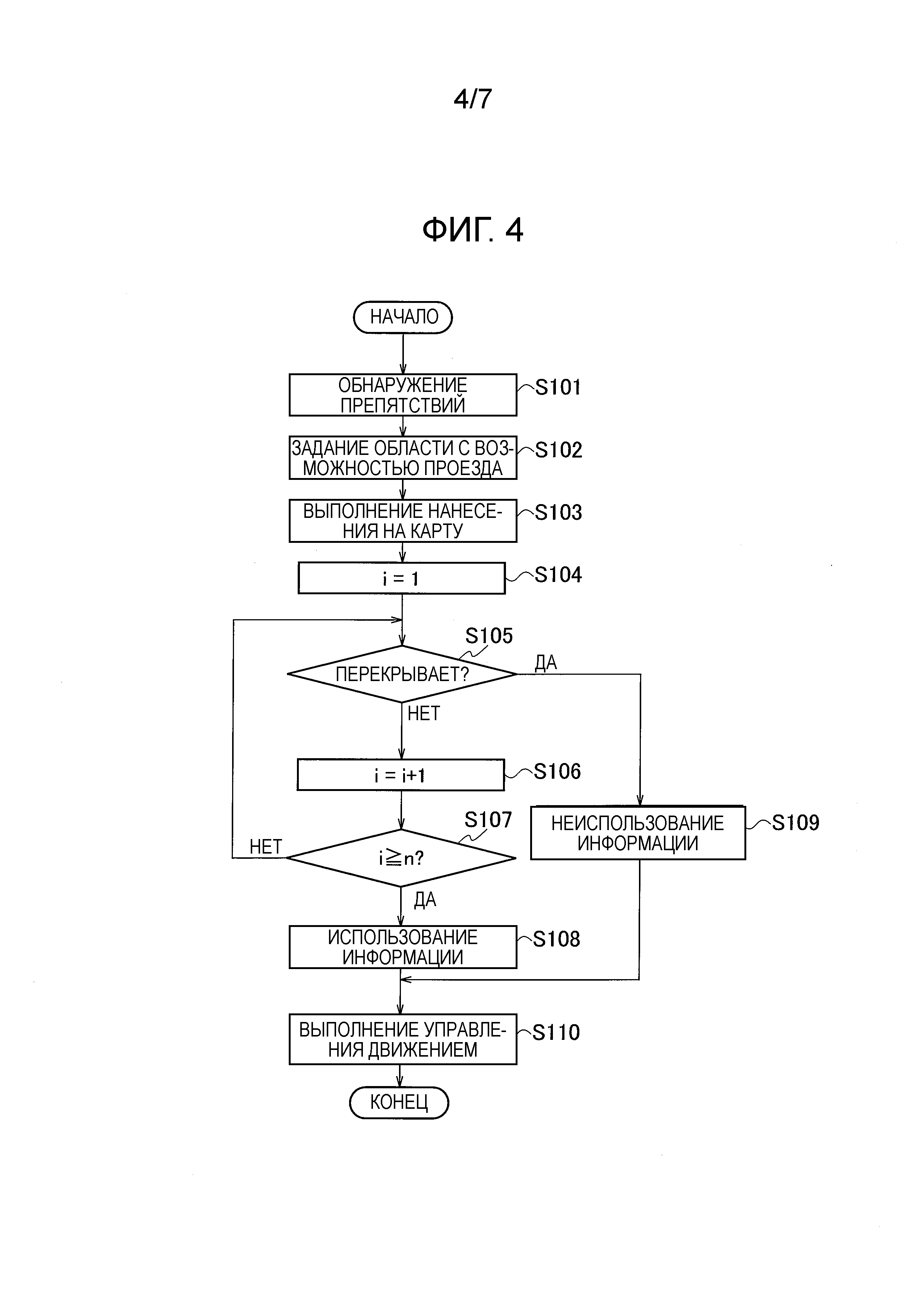
Части (a)-(c) на фиг. 3 - это виды для объяснения способа оценки, перекрывает ли препятствие область за пределами области с возможностью проезда. Часть (b) на фиг. 3 - это укрупненный вид фрагмента, окруженного пунктирной линией в части (a) на фиг. 3.
[Фиг. 4]
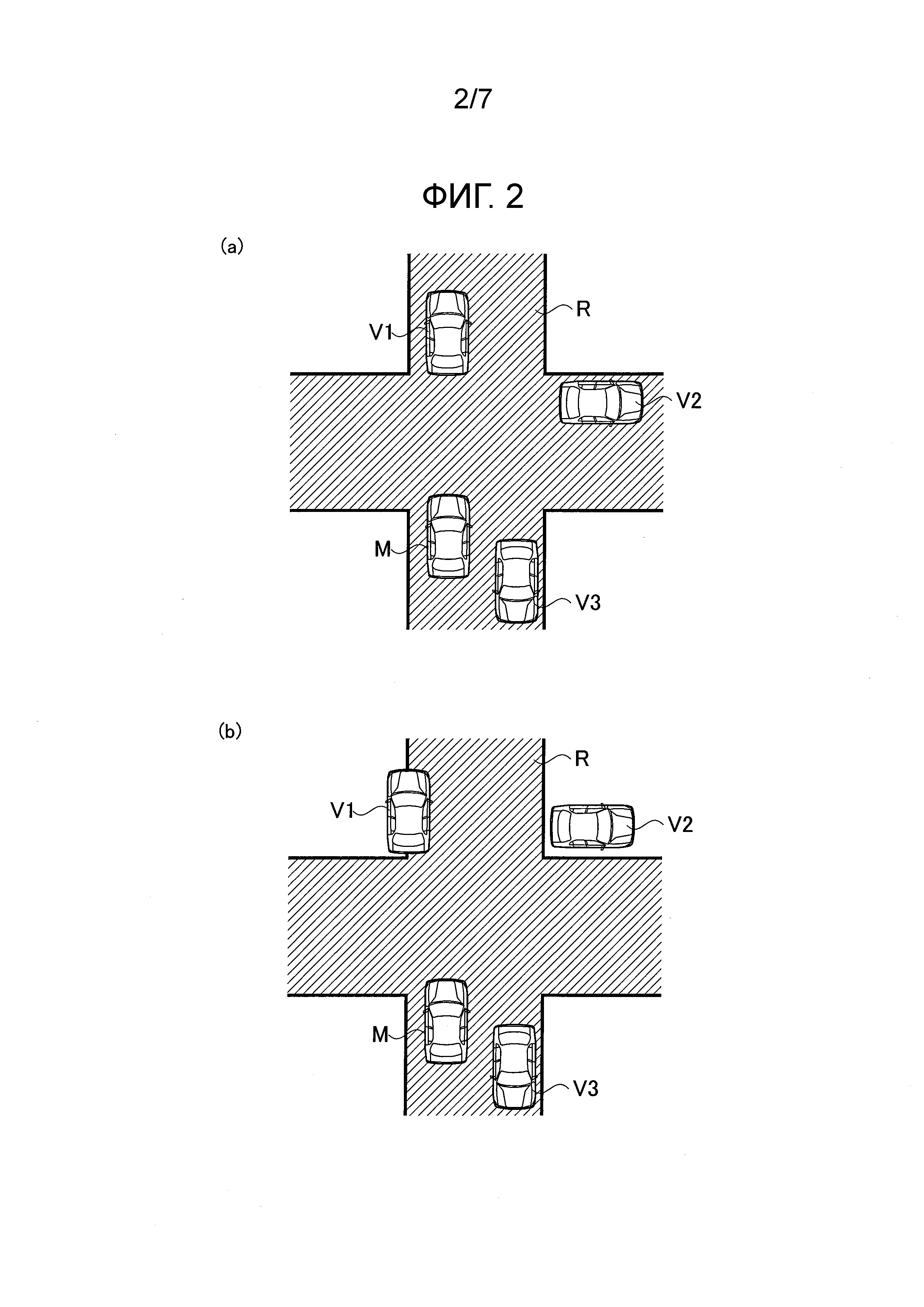
Фиг. 4 - это блок-схема последовательности операций для объяснения примера работы устройства проверки периферийной информации транспортного средства согласно варианту осуществления настоящего изобретения.
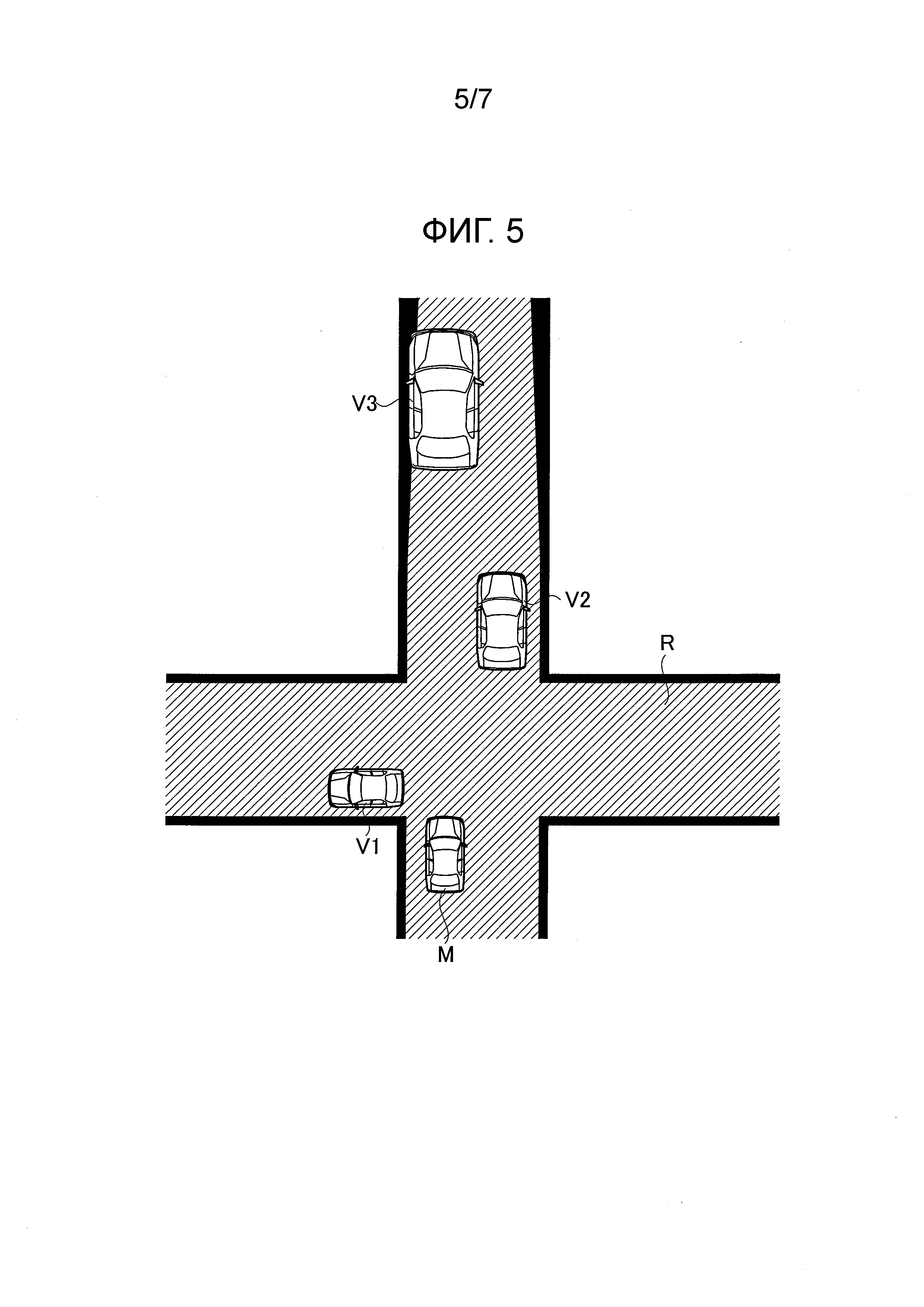
[Фиг. 5]
Фиг. 5 - это вид, в котором область с возможностью проезда и транспортные средства размещаются на карте.
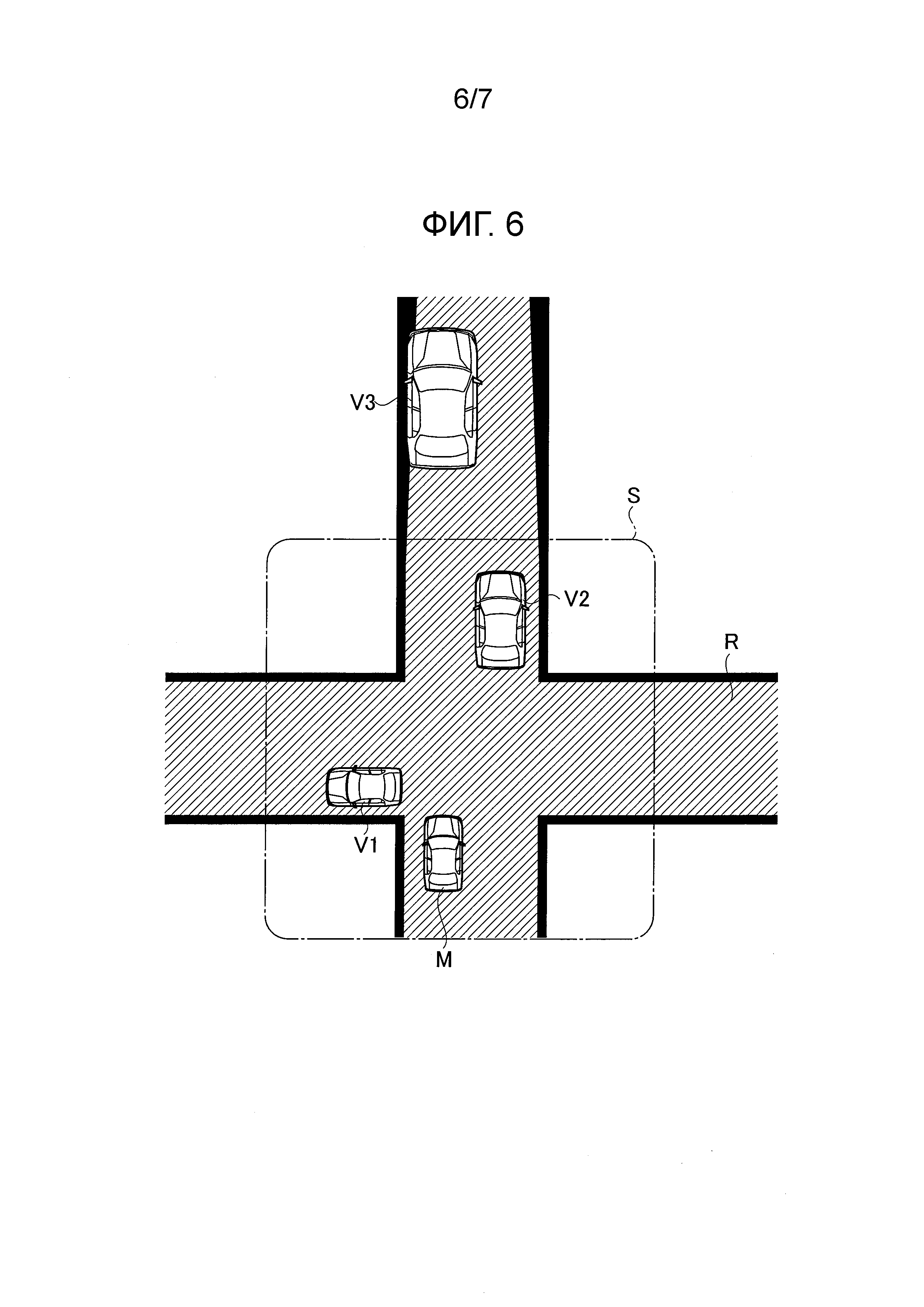
[Фиг. 6]
Фиг. 6 - это вид, в котором область с возможностью проезда и транспортные средства размещаются на карте.
[Фиг. 7]
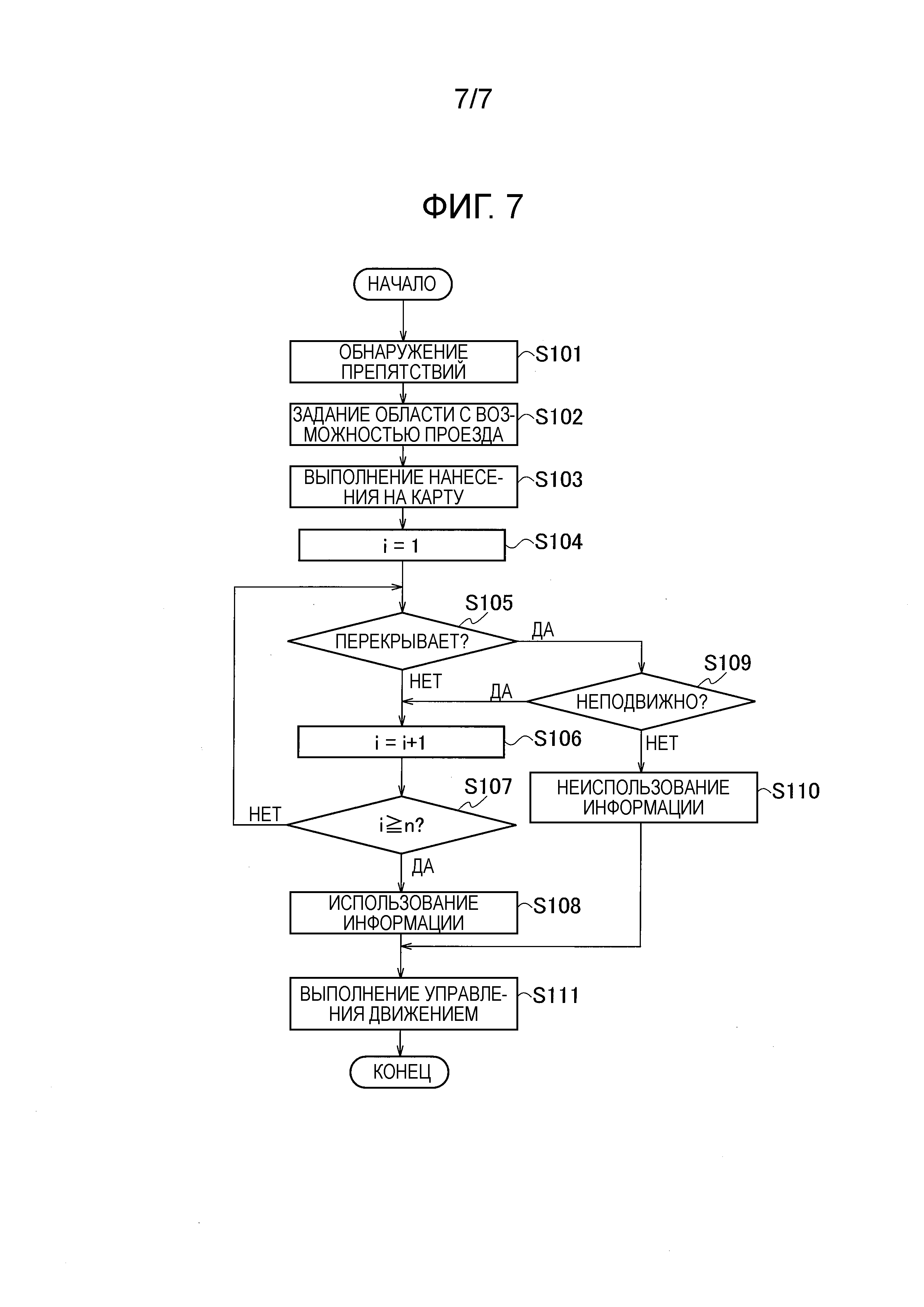
Фиг. 7 - это блок-схема последовательности операций для объяснения примера работы устройства проверки периферийной информации согласно модифицированному примеру 2 варианта осуществления настоящего изобретения.
Описание вариантов осуществления
[0008] Вариант осуществления настоящего изобретения описывается ниже со ссылкой на чертежи. Одинаковые части в описании чертежей обозначаются одинаковыми ссылочными номерами, и их объяснение пропускается.
[0009] Конфигурация устройства 1 проверки периферийной информации транспортного средства согласно варианту осуществления настоящего изобретения описывается со ссылкой на фиг. 1. Как иллюстрировано на фиг. 1, устройство 1 проверки периферийной информации транспортного средства включает в себя инструментальное средство 20 обнаружения периферийной информации (блок обнаружения препятствия), инструментальное средство 30 обнаружения информации рассматриваемого транспортного средства, контроллер 40 и картографическую базу данных 10, в которой хранится картографическая информация, такая как дорожная информация и информация о сооружениях.
[0010] Инструментальное средство 20 обнаружения периферийной информации является инструментальным средством, которое получает информацию о препятствиях на периферии рассматриваемого транспортного средства и является, например, камерой, лазерным радаром и т.п. Инструментальное средство 20 обнаружения периферийной информации обнаруживает объекты, присутствующие на периферии рассматриваемого транспортного средства, такие как другие транспортные средства, мотоциклы, велосипеды и пешеходы, и определяет расстояния от рассматриваемого транспортного средства, относительные углы, относительные скорости и т.п. Затем, инструментальное средство 20 обнаружения периферийной информации выводит обнаруженную информацию (далее в данном документе просто называемую обнаруженной периферийной информацией) в контроллер 40.
[0011] Инструментальное средство 30 обнаружения информации рассматриваемого транспортного средства является инструментальным средством, которое обнаруживает информацию о рассматриваемом транспортном средстве, и является, например, датчиком скорости транспортного средства, датчиком угла поворота рулевого колеса, GPS-приемником и т.п. Инструментальное средство 30 обнаружения информации рассматриваемого транспортного средства выводит обнаруженную скорость, угол поворота рулевого колеса и позиционную информацию рассматриваемого транспортного средства в контроллер 40.
[0012] Контроллер 40 выполняет автономное управление движением рассматриваемого транспортного средства с помощью информации картографической базы данных 10, инструментального средства 20 обнаружения периферийной информации и инструментального средства 30 обнаружения информации рассматриваемого транспортного средства. В частности, контроллер 40 принимает решение о маршруте движения до пункта назначения с помощью информации из картографической базы данных 10. Далее, контроллер 40 управляет различными актуаторами с помощью информации инструментального средства 20 обнаружения периферийной информации и инструментального средства 30 обнаружения информации рассматриваемого транспортного средства и инструктирует рассматриваемому транспортному средству автономно двигаться по оцененному маршруту движения. Отметим, что картографическая база данных 10 может быть сохранена в автомобильном навигационном устройстве, установленном в транспортном средстве, или на сервере. Когда картографическая база данных 10 хранится на сервере, контроллер 40 может получать картографическую информацию время от времени посредством связи.
[0013] Контроллер 40 может быть разделен на блок 41 картографии, блок 42 оценки расхождения, блок 43 определения действия, блок 44 запрета и блок 45 управления движением, когда рассматривается с точки зрения функционирования.
[0014] Блок 41 картографии (блок размещения) задает область R с возможностью проезда, которая будет описана позже, на карте и размещает препятствия, обнаруженные инструментальным средством 20 обнаружения периферийной информации, на карте.
[0015] Блок 42 оценки расхождения (блок оценки) оценивает, существует ли расхождение между областью R с возможностью проезда, заданной посредством блока 41 картографии, и размещенными препятствиями. Блок 42 оценки расхождения выводит результат оценки в блок 43 определения действия.
[0016] Блок 43 определения действия (блок определения действия) определяет действие автономного вождения на основе результата оценки блока 42 оценки расхождения и выводит результат определения в блок 45 управления движением.
[0017] Запрещающий блок 44 (запрещающий блок) запрещает блоку 43 определения действия определять действие автономного вождения на основе результата оценки блока 42 оценки расхождения.
[0018] Блок 45 управления движением управляет различными актуаторами на основе определения блока 43 определения действия и выполняет автономное управление движением рассматриваемого транспортного средства.
[0019] Отметим, что контроллер 40 является, например, компьютером, включающим в себя CPU, ROM, RAM, шину данных, соединяющую эти блоки, и интерфейс ввода-вывода, и CPU выполняет предварительно определенную обработку согласно программе, сохраненной в ROM.
[0020] Конкретный пример работы устройства 1 проверки периферийной информации транспортного средства, имеющего вышеупомянутую конфигурацию, описывается со ссылкой на части (a) и (b) на фиг. 2.
[0021] Как иллюстрировано в части (a) на фиг. 2, блок 41 картографии задает область R с возможностью проезда на карте с помощью позиционной информации рассматриваемого транспортного средства M и картографической базы данных 10. Область R с возможностью проезда является областью, в которой транспортное средство может физически двигаться, и является, например, областью, включающей в себя проезжую часть дороги и обочины. Затем, блок 41 картографии размещает другие транспортные средства V1-V3 на карте с помощью позиционной информации о других транспортных средствах V1-V3, полученной от инструментального средства 20 обнаружения периферийной информации. Обстановка движения, близкая к фактической обстановке, может быть получена посредством выполнения нанесения на карту, как описано выше.
[0022] Когда происходит сбой в инструментальном средстве 20 обнаружения периферийной информации, или вокруг транспортного средства возникает туман, точность обнаружения инструментального средства 20 обнаружения периферийной информации может снижаться. Если используется информация с плохой точностью обнаружения, например, как иллюстрировано в части (b) на фиг. 2, существует вероятность, что часть другого транспортного средства V1 размещается, чтобы перекрывать область за пределами области R с возможностью проезда, или все транспортное средство размещается за пределами области R с возможностью проезда аналогично другому транспортному средству V2.
[0023] Когда получается результат размещения, иллюстрированный в части (b) на фиг. 2, информация о других транспортных средствах V1, V2 может быть информацией, включающей в себя ошибки, и выполнение автономного вождения с помощью такой информации может приводить к автономному вождению с плохой точностью. Таким образом, в таком случае, блок 42 оценки расхождения оценивает, что обнаруженная периферийная информация включает в себя расхождение, и выводит результат оценки в блок 43 определения действия и запрещающий блок 44. Когда блок 42 оценки расхождения оценивает, что обнаруженная периферийная информация включает в себя расхождение, запрещающий блок 44 выводит команду блоку 43 определения действия и запрещает блоку 43 определения действия определение действия автономного вождения с помощью обнаруженной периферийной информации. Другими словами, блок 43 определения действия определяет действие автономного вождения без помощи обнаруженной периферийной информации на основе команды запрещающего блока 44. Отметим, что, когда запрещающий блок 44 запрещает блоку 43 определения действия определение действия автономного вождения с помощью обнаруженной периферийной информации, например, блок 43 определения действия может определять выполнение действия поддержания состояния движения перед запретом посредством запрещающего блока 44 или может останавливать транспортное средство в безопасном месте с помощью ранее сохраненной информации. Кроме того, контроллер 40 может уведомлять водителя о том, что обнаруженная периферийная информация включает в себя расхождение, посредством голосового руководства или т.п. и вынуждать водителя переключаться с автономного вождения на ручное вождение.
[0024] Между тем, когда другие транспортные средства V1-V3 размещаются в области R с возможностью проезда, как иллюстрировано в части (a) на фиг. 2, блок 42 оценки расхождения оценивает, что обнаруженная периферийная информация не включает в себя расхождение, и выводит результат оценки в блок 43 определения действия и запрещающий блок 44. В этом случае, поскольку обнаруженная периферийная информация не включает в себя расхождение, блок 43 определения действия определяет действие автономного вождения с помощью обнаруженной периферийной информации.
[0025] Далее, способ оценки того, размещаются ли другие транспортные средства V1-V3 в области R с возможностью проезда, описывается со ссылкой на части (a)-(c) на фиг. 3. Как иллюстрировано в части (b) на фиг. 3, которая является укрупненным видом фрагмента пунктирной линии в части (a) на фиг. 3, блок 42 оценки расхождения задает первую конечную точку P0 и вторую конечную точку P1 на пограничной линии области R с возможностью проезда с помощью обнаруженной периферийной информации. В этом случае расстояние от первой конечной точки P0 до второй конечной точки P1 называется x1. Кроме того, блок 42 оценки расхождения получает ширину транспортного средства (длина называется x2) для другого транспортного средства V1 из обнаруженной периферийной информации. Кроме того, расстояние от конечной точки P0, включающее в себя ширину транспортного средства для другого транспортного средства V1, называется x3.
[0026] Блок 42 оценки расхождения оценивает, что другое транспортное средство V1 размещено в области R с возможностью проезда, когда x3 > x2+x1. Другими словами, блок 42 оценки расхождения оценивает, может ли разделительная линия L, которая не перекрывает другое транспортное средство V1, быть начерчена между другим транспортным средством V1 и областью R с возможностью проезда, и, когда разделительная линия L может быть начерчена, оценивает, что другое транспортное средство V1 размещено в области R с возможностью проезда. Между тем, как иллюстрировано в части (c) на фиг. 3, когда x3 <= x2+x1, блок 42 оценки расхождения оценивает, что другое транспортное средство V1 не размещено в области R с возможностью проезда.
[0027] Далее пример работы устройства 1 проверки периферийной информации транспортного средства описывается со ссылкой на блок-схему последовательности операций на фиг. 4.
[0028] На этапе S101 инструментальное средство 20 обнаружения периферийной информации обнаруживает препятствия, присутствующие на периферии рассматриваемого транспортного средства M. Когда обнаруживается множество транспортных средств, например, обнаруживаются три других транспортных средства, как иллюстрировано в части (a) на фиг. 2, инструментальное средство 20 обнаружения периферийной информации задает названия V1, V2, V3 для обнаруженных других транспортных средств, соответственно. Когда инструментальное средство 20 обнаружения периферийной информации обнаруживает n других транспортных средств, названием n-го транспортного средства является Vn. На последующих этапах описание предоставляется, предполагая, что обнаруживаются три других транспортных средства (n=3).
[0029] На этапе S102 блок 41 картографии задает область R с возможностью проезда на карте с помощью позиционной информации рассматриваемого транспортного средства M и картографической базы данных 10.
[0030] На этапе S103 блок 41 картографии размещает другие транспортные средства V1-V3, обнаруженные на этапе S101, в области R с возможностью проезда.
[0031] На этапе S104 блок 42 оценки расхождения задает переменную i в 1, чтобы оценивать, перекрывает ли каждое из других транспортных средств V1-V3 область за пределами области R с возможностью проезда, на этапе S105 и после. Когда переменная i устанавливается в 1, другое транспортное средство V1 является целью оценки.
[0032] На этапе S105 блок 42 оценки расхождения оценивает, перекрывает ли другое транспортное средство V1 область за пределами области R с возможностью проезда. Когда другое транспортное средство V1 не перекрывает область за пределами области R с возможностью проезда (Нет на этапе S105), обработка переходит к этапу S106. Между тем, когда другое транспортное средство V1 перекрывает область за пределами области R с возможностью проезда (Да на этапе S105), обработка переходит к этапу S109.
[0033] На этапе S106 блок 42 оценки расхождения устанавливает переменную i в i+1. Другое транспортное средство V2, таким образом, становится следующей целью оценки.
[0034] На этапе S107 блок 42 оценки расхождения оценивает, действительно ли i > n. Когда i > n (Да на этапе S107), обработка переходит к этапу S108. Между тем, когда i < n (Нет на этапе S107), обработка возвращается к этапу S105. Повторяя обработку этапов S105-S107, блок 42 оценки расхождения оценивает, присутствует ли по меньшей мере одно другое транспортное средство, перекрывающее область за пределами области R с возможностью проезда. В частности, когда другое транспортное средство, перекрывающее область за пределами области R с возможностью проезда, не присутствует вообще, блок 42 оценки расхождения решает, что другие транспортные средства (V1-V3), все размещаются в области R с возможностью проезда.
[0035] На этапе S108, поскольку другие транспортные средства (V1-V3), все размещаются в области R с возможностью проезда, блок 43 определения действия определяет действие автономного вождения с помощью обнаруженной периферийной информации.
[0036] Между тем, на этапе S109, когда по меньшей мере одно из препятствий, обнаруженных на этапе S101, перекрывает область за пределами области R с возможностью проезда, запрещающий блок 44 запрещает блоку 43 определения действия определять действие автономного вождения с помощью обнаруженной периферийной информации. Блок 43 определения действия, таким образом, определяет действие автономного вождения без использования обнаруженной периферийной информации.
[0037] На этапе S110 блок 45 управления движением выполняет автономное управление движением рассматриваемого транспортного средства M, управляя различными актуаторами на основе определения, выполненного на этапе S108 или этапе S109.
[0038] Как описано выше, в устройстве 1 проверки периферийной информации транспортного средства согласно варианту осуществления следующие действия и результаты могут быть получены.
[0039] Устройство 1 верификации периферийной информации транспортного средства размещает обнаруженные препятствия в области R с возможностью проезда и оценивает, перекрывает ли каждое препятствие область за пределами области R с возможностью проезда. Затем, когда оценивается, что какое-либо из препятствий перекрывает область за пределами области R с возможностью проезда, устройство 1 проверки периферийной информации транспортного средства самостоятельно запрещает определять действие автономного вождения с помощью обнаруженной периферийной информации, определяет действие автономного вождения без использования обнаруженной периферийной информации и выполняет автономное управление движением рассматриваемого транспортного средства M на основе этого определения. Это предотвращает использование устройством 1 проверки периферийной информации транспортного средства обнаруженной периферийной информации, включающей в себя расхождение, и безопасное и очень точное автономное вождение может, таким образом, быть успешно выполнено. Кроме того, когда все обнаруженные препятствия размещаются в области R с возможностью проезда, устройство 1 проверки периферийной информации транспортного средства определяет действие автономного вождения с помощью обнаруженной периферийной информации и выполняет автономное управление движением рассматриваемого транспортного средства на основе этого определения.
[0040] Кроме того, когда, по меньшей мере, часть препятствия перекрывает область за пределами области R с возможностью проезда, как иллюстрировано в части (b) на фиг. 2, устройство 1 проверки периферийной информации транспортного средства определяет действие автономного вождения без использования обнаруженной периферийной информации. Обнаруженная периферийная информация, включающая в себя какое-либо расхождение, таким образом, не используется, и устройство 1 проверки периферийной информации транспортного средства может, таким образом, успешно выполнять более безопасное автономное вождение.
[0041] Кроме того, устройство 1 проверки периферийной информации транспортного средства оценивает, может ли разделительная линия L, не перекрывающая препятствие, быть начерчена между препятствием и областью R с возможность движения, чтобы оценивать, размещено ли препятствие в области R с возможностью проезда. Устройство 1 проверки периферийной информации транспортного средства может, таким образом, точно оценивать, размещено ли препятствие в области R с возможностью проезда.
[0042] [Модифицированный пример 1]
Далее, модифицированный пример 1 варианта осуществления описывается со ссылкой на фиг. 5. В модифицированном примере 1, как иллюстрировано на фиг. 5, блок 41 картографии увеличивает толщину пограничных линий области R с возможностью проезда, когда расстояние от рассматриваемого транспортного средства M увеличивается. Кроме того, блок 41 картографии увеличивает размер каждого из размещенных других транспортных средств V1-V3, когда расстояние от рассматриваемого транспортного средства M увеличивается. Эти операции выполняются с учетом погрешностей (погрешностей измерения) камеры и радара. В целом, погрешности камеры, лазерного радара и т.п. увеличиваются, когда расстояние увеличивается. Соответственно, погрешность может быть включена в информацию о другом транспортном средстве, присутствующем далеко от рассматриваемого транспортного средства M. Таким образом, как иллюстрировано на фиг. 5, блок 41 картографии увеличивает толщину пограничных линий области R с возможностью проезда и увеличивает размер другого транспортного средства, когда расстояние от рассматриваемого транспортного средства M увеличивается. Другое транспортное средство V3, которое присутствует далеко от рассматриваемого транспортного средства M, таким образом, как более вероятно будет оценено, должно перекрывать область за пределами области R с возможностью проезда. Отметим, что увеличение толщины пограничных линий области R с возможностью проезда является, другими словами, уменьшением размера области R с возможностью проезда.
[0043] Как описано выше, устройство 1 проверки периферийной информации транспортного средства согласно модифицированному примеру 1 уменьшает размер области R с возможностью проезда и увеличивает размер другого транспортного средства более крупно в зависимости от расстояния от рассматриваемого транспортного средства. Устройство 1 проверки периферийной информации транспортного средства, таким образом, более вероятно должно обнаруживать обнаруженную периферийную информацию, включающую в себя расхождение. Это предотвращает использование устройством 1 проверки периферийной информации транспортного средства обнаруженной периферийной информации, включающей в себя расхождение, и безопасное и очень точное автономное вождение может, таким образом, быть успешно выполнено.
[0044] Кроме того, устройство 1 проверки периферийной информации транспортного средства согласно модифицированному примеру 1 размещает другое транспортное средство, в то же время увеличивая его размер, когда расстояние от рассматриваемого транспортного средства M до другого транспортного средства увеличивается. Устройство 1 проверки периферийной информации транспортного средства, таким образом, более вероятно должно обнаруживать обнаруженную периферийную информацию, включающую в себя расхождение. Это предотвращает использование устройством 1 проверки периферийной информации транспортного средства обнаруженной периферийной информации, включающей в себя расхождение, и безопасное и очень точное автономное вождение может, таким образом, быть успешно выполнено.
[0045] Кроме того, устройство 1 проверки периферийной информации транспортного средства согласно модифицированному примеру 1 уменьшает размер области R с возможностью проезда, когда расстояние от рассматриваемого транспортного средства M увеличивается. Устройство 1 проверки периферийной информации транспортного средства, таким образом, более вероятно должно обнаруживать обнаруженную периферийную информацию, включающую в себя расхождение. Это предотвращает использование устройством 1 проверки периферийной информации транспортного средства обнаруженной периферийной информации, включающей в себя расхождение, и безопасное и очень точное автономное вождение может, таким образом, быть успешно выполнено.
[0046] Отметим, что устройство 1 проверки периферийной информации транспортного средства может быть сконфигурировано так, что, как иллюстрировано на фиг. 6, блок 41 картографии задает диапазон S обнаружения, который является некоторым диапазоном расстояния от рассматриваемого транспортного средства M, с учетом погрешностей камеры, лазерного радара и т.п., и блок 42 оценки расхождения оценивает, перекрывают ли другие транспортные средства V1, V2 в диапазоне S обнаружения область за пределами области R с возможностью проезда. Блок 42 оценки расхождения может, таким образом, оценивать, включает ли в себя информация расхождение в диапазоне, в котором ошибки являются небольшими. Отметим, что диапазон S обнаружения может быть получен заранее посредством экспериментов и моделирований на основе характеристик камеры, лазерного радара и т.п.
[0047] [Модифицированный пример 2]
Далее, модифицированный пример 2 варианта осуществления описывается со ссылкой на блок-схему последовательности операций на фиг. 7. В модифицированном примере 2 блок 42 оценки расхождения дополнительно оценивает, являются ли другие транспортные средства неподвижными. Это обусловлено тем, что возможен случай, когда другое транспортное средство приводится в движение через бордюр и останавливается, и информация об этом другом транспортном средстве не включает в себя расхождение. Этот момент описывается ниже.
[0048] Поскольку этапы S101-S108 и S110-S111, изображенные на фиг. 7, являются такими же операциями, что и этапы S101-S108 и S109-S110 на фиг. 4, соответственно, их описание пропускается. В этом случае описание предоставляется, предполагая, что на этапе S105, изображенном на фиг. 7, блок 42 оценки расхождения оценивает, что другое транспортное средство V1 перекрывает область за пределами области R с возможностью проезда, и обработка переходит к этапу S109.
[0049] На этапе S109 блок 42 оценки расхождения оценивает, является или нет другое транспортное средство V1 неподвижным. Например, блок 42 оценки расхождения оценивает, что другое транспортное средство V1 является неподвижным, когда скорость другого транспортного средства V1 равна или ниже предварительно определенной скорости (например, 5 км/ч). В этом случае (Да на этапе S109), обработка переходит к этапу S106. В частности, это означает, что, хотя другое транспортное средство V1 перекрывает область за пределами области R с возможностью проезда, поскольку случай, когда другое транспортное средство V1 было приведено в движение с обочины через бордюр и остановилось, является возможным, и блок 42 оценки расхождения оценивает, что информация о другом транспортном средстве V1 не включает в себя расхождение. Когда блок 42 оценки расхождения оценивает, что другое транспортное средство V1 не является неподвижным (Нет на этапе S109), обработка переходит к этапу S110. Повторяя обработку этапов S105-S107 и S109, изображенных на фиг. 7, блок 42 оценки расхождения оценивает, присутствует ли по меньшей мере одно другое транспортное средство, которое является неподвижным и перекрывает область за пределами области R с возможностью проезда. Другими словами, когда другое транспортное средство, которое не является неподвижным и перекрывает область за пределами области R с возможностью проезда, не присутствует, блок 42 оценки расхождения оценивает, что все другие транспортные средства размещаются в области R с возможностью проезда или перекрывают область за пределами области R с возможностью проезда, но являются неподвижными.
[0050] Как описано выше, когда оценивается, что какое-либо из других транспортных средств перекрывает область за пределами области R с возможностью проезда, устройство 1 проверки периферийной информации транспортного средства согласно модифицированному примеру 2 оценивает, является ли это другое транспортное средство неподвижным. Затем, когда устройство 1 проверки периферийной информации транспортного средства оценивает, что другое транспортное средство является неподвижным, и все другие обнаруженные препятствия размещаются в области R с возможностью проезда или перекрывают область за пределами области R с возможностью проезда, но являются неподвижными, устройство 1 проверки периферийной информации транспортного средства определяет действие автономного вождения с помощью обнаруженной периферийной информации. Устройство 1 проверки периферийной информации транспортного средства может, таким образом, успешно выполнять безопасное и очень точное автономное вождение.
[0051] Хотя вариант осуществления настоящего изобретения был описан выше, не должно подразумеваться, что описание и чертежи, формирующие часть этого описания изобретения, ограничивают настоящее изобретение. Из этого описания изобретения различные альтернативные варианты осуществления, примеры и операционные техники будут найдены специалистами в области техники. Например, хотя пример, в котором препятствие оценивается как неразмещенное в области R с возможностью проезда, когда, по меньшей мере, часть препятствия размещается за пределами области с возможностью проезда, описывается в варианте осуществления, настоящее изобретение не ограничивается этим примером. Препятствие может быть оценено как неразмещенное в области R с возможностью проезда, когда все препятствие размещено за пределами области R с возможностью проезда.
[0052] Кроме того, в варианте осуществления, когда по меньшей мере одно из препятствий перекрывает область за пределами области R с возможностью проезда, определение действия автономного вождения с помощью обнаруженной периферийной информации запрещается, и действие автономного вождения определяется без использования обнаруженной периферийной информации, но настоящее изобретение не ограничивается этим. Действие автономного вождения может быть определено без использования только информации о препятствии, перекрывающем область за пределами области R с возможностью проезда. В частности, в описании со ссылкой на часть (b) на фиг. 2, устройство проверки периферийной информации транспортного средства может самостоятельно запрещать определение действия автономного вождения с помощью информации о других транспортных средствах V1, V2 и определять действие автономного вождения, используя информацию о другом транспортном средстве V3.
Список ссылочных знаков
[0053] 10 картографическая база данных
20 инструментальное средство обнаружения периферийной информации
30 инструментальное средство обнаружения информации рассматриваемого транспортного средства
40 контроллер
41 блок картографии
42 блок оценки расхождения
43 блок определения действия
44 запрещающий блок
45 блок управления движением
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

