Результат интеллектуальной деятельности: ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ
Вид РИД
Изобретение
Изобретение относится к области приборостроения и используется при определении азимутов.
Известен гирокомпас, описанный в патенте US 2902772 [1], в котором использован чувствительный элемент - поплавковый интегрирующий гироскоп и карданов подвес чувствительного элемента. Гироскоп установлен на платформе, которая лежит в плоскости внутренней рамы карданова подвеса и имеет возможность разворота для установки оси чувствительности гироскопа в плоскости меридиана, а азимут определяют по сигналам датчика угла, установленного на оси карданова подвеса, с помощью которого определяют угловое положение платформы относительно внутренней рамы подвеса, определяя тем самым азимут. Недостатком этого гирокомпаса является сложность конструкции и низкая точность измерений.
Наиболее близким устройством по сущности и достигаемому эффекту является гирокомпас, описанный в патенте RU 2339910 [2], в котором в качестве чувствительных элементов гирокомпаса выбраны: датчик угловой скорости (ДУС) и два наклономера для контроля положения оси чувствительности ДУС относительно горизонтальной плоскости. Указанные чувствительные элементы расположены в термостате, который установлен в двухосном кардановом подвесе. Датчик угла установлен на внутренней оси подвеса с возможностью измерения углового положения термостата относительно рамы подвеса. ДУС установлен в термостате таким образом, что указанный датчик угла позволяет определять угол между наружной осью подвеса, и осью вращения ротора гиромотора ДУС (главной осью ДУС) и может измерять углы между измерительными положениями ДУС в азимуте. Для повышения точности гирокомпас производит измерения в нескольких положениях и компенсирует уходы гироскопа. Оптический отражатель (ОО) предназначен для обеспечения возможности передачи измеренного прибором азимута на объекты, азимут которых требуется определить. Он представляет собой набор призм с взаимно перпендикулярными гранями. ОО закрепляется на свободном торце наружной оси так, чтобы ребра призм были перпендикулярны внутренней оси карданова подвеса.
Основным недостатком конструкции является то, что измерения включают все погрешности изготовления оптического отражателя, погрешности внешнего теодолита, а также погрешности снятия отчетов оператором при наведении оптической оси теодолита на ОО, т.е. недостаточная точность измерений.
Задачей изобретения является расширение функциональных возможностей (вектор азимута на внешний хранитель направления должен передаваться напрямую без дополнительных приборов), повышение точности измерений и расширение допустимых для работы температурных условий внешней среды.
Технический результат достигается тем, что в гирокомпас с визуальным каналом, содержащий связанные между собой посредством соединительных электрических кабелей компьютер, блок электронных приборов и гироскопическую часть в виде герметичного корпуса, содержащего датчик угла (ДУ), карданов подвес (КП), приводы КП, термостат в котором установлены гироблок и наклономеры, введен теодолит содержащий ручной привод и сервоприводы, два наклономера расположенных на визирной трубе теодолита и два датчика угла, теодолит расположен на штанге так, что наружная ось теодолита лежит на одной линии с продольной осью штанги, при этом, на другом конце штанги установлена гироскопическая часть таким образом, что наружная ось КП жестко закреплена на штанге на одной линии с ее продольной осью с возможностью вращения рамы КП вокруг продольной оси штанги, на которой установлены первый ДУ теодолита и ДУ гироскопической части обеспечивающие, соответственно, фиксацию углов поворота зрительной трубы теодолита и рамы КП вокруг продольной оси штанги, второй ДУ теодолита осуществляет отсчет углов наклона трубы к плоскости перпендикулярной наружной оси теодолита, опорное устройство выполнено с возможностью установки продольной оси штанги в вертикальное положение; термостат установлен на внутренней оси КП, при этом на нем симметрично, относительно центра гироблока, встроены нагревательные элементы и термоэлектрические модули на элементах Пельтье; в блок электронных приборов введен блок теодолита, выполненный с возможностью приема сигнала с теодолита и передачи цифрового сигнала в компьютер.
Отличительной особенностью также является то, что блок электронных приборов размещен в герметичном корпусе с термостатированием и на торце внутренней оси теодолита установлен оптический отражатель.
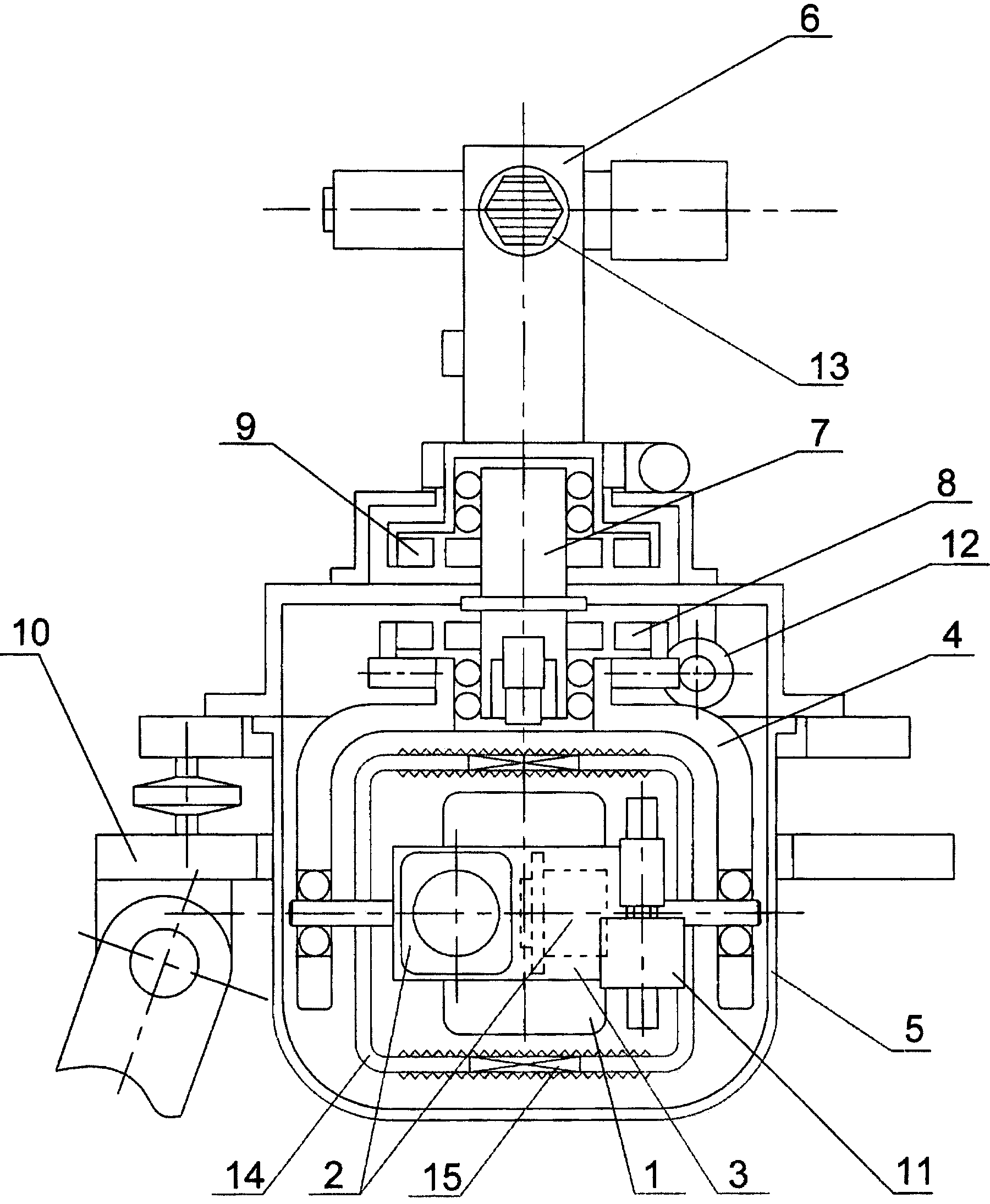
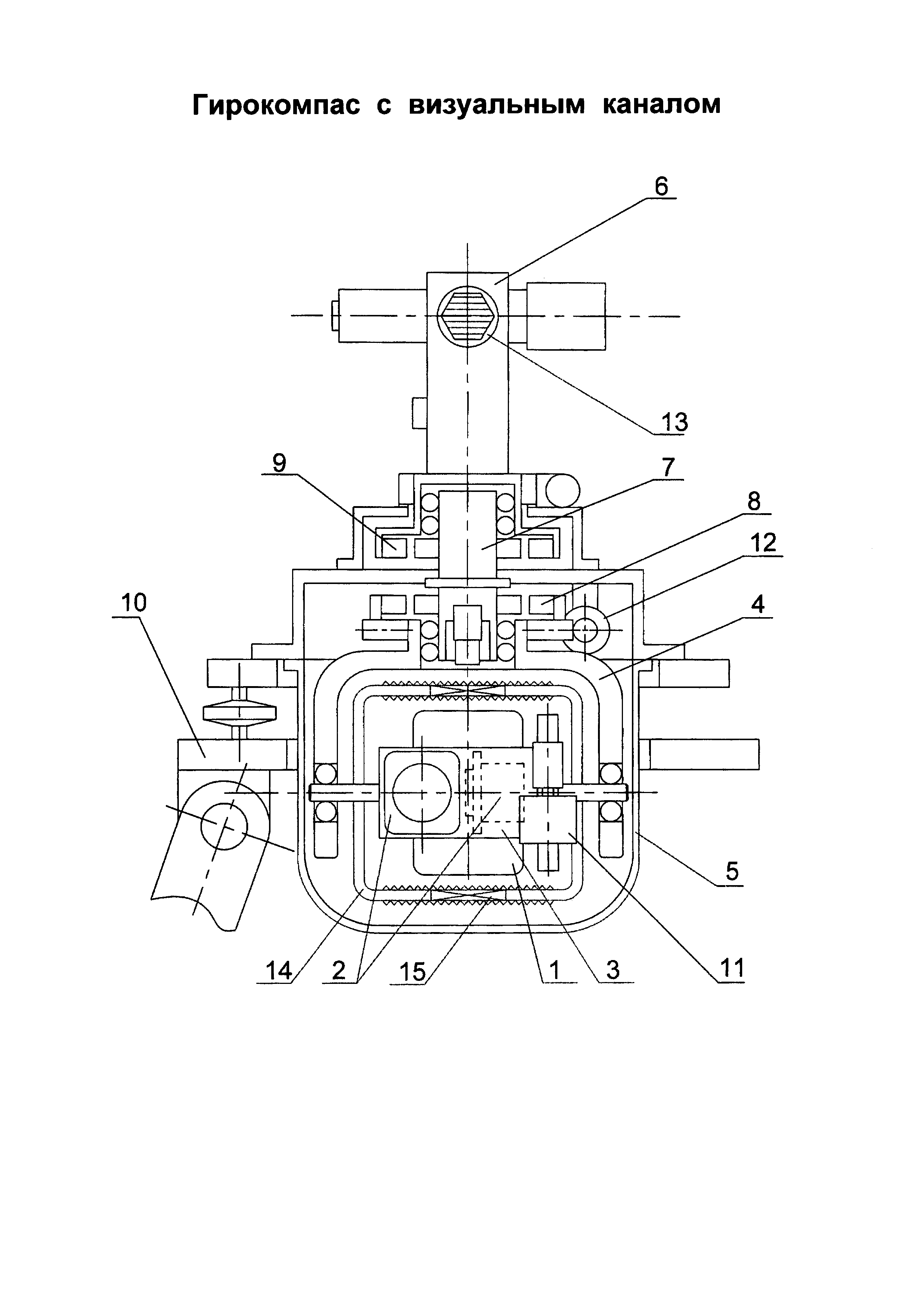
На чертеже представлены следующие элементы гирокомпаса с визуальным каналом:
1 гироблок;
2 наклономеры;
3 приборная платформа (ПП);
4 карданов подвес;
5 герметичный корпус;
6 теодолит;
7 штанга;
8 датчик угла гироскопической части;
9 первый датчик угла теодолита;
10 опорное устройство;
11 привод внутренней оси;
12 привод наружной оси;
13 оптический отражатель;
14 термостат;
15 термоэлектрический модуль.
Принцип действия гирокомпаса с визуальным каналом основан на измерении проекции горизонтальной составляющей скорости вращения Земли в нескольких положениях.
Гирокомпас с визуальным каналом содержит гироблок (1), работающий в режиме датчика угловой скорости (ДУС), и два наклономера (2), измеряющих изменения углов наклона гироблока в двух взаимно перпендикулярных плоскостях. Эти чувствительные элементы, а также усилители ДУС, закреплены на ПП (3) посредством двухосного карданова подвеса (4) установленного в герметичный корпус (5) гироскопической части. Внутренняя ось КП в рабочем положении располагается горизонтально. Подшипниковые опоры ПП находятся на раме КП, имеющей собственную наружную ось, устанавливаемую вертикально. Рама с помощью подшипникового узла может вращаться вокруг штанги, устанавливаемой вертикально. На обеих осях КП имеются приводы, которые устанавливают раму и ПП в измерительные положения и удерживают ПП в этих положениях. Электрические соединения приборов, находящихся на ПП и осях КП, осуществляются через токоподводы. Корпус термостата установлен на внутренней оси КП, содержит гироблок и наклономеры. В корпус термостата (14) симметрично, относительно центра гироблока (1), встроены нагревательные элементы (на фиг. не показаны) и термоэлектрические модули (15) на элементах Пельтье. Управление нагревательными элементами и термоэлектрическими модулями осуществляется электронным блоком термостата по показаниям датчиков температуры. Такая конструкция термостата обеспечивает ускоренный выход в режим тепловой готовности и стабильный тепловой режим ПП, не зависимо от температурных условий внешней среды. Это позволяет исключить негативное влияние теплового градиента на гироблок и наклономеры, возникающее из-за конвекционных процессов внутри термостата. Ось прецессии гироблока в измерительных положениях устанавливается вертикально так, что вектор кинетического момента направлен по направлению внутренней оси КП.
Корпус теодолита (6) с помощью подшипникового узла может вращаться вокруг продольной оси штанги (7), устанавливаемой вертикально вручную (и лежащей на одной линии с азимутальной осью теодолита). Точная наводка визирной трубы по азимутальной оси теодолита, как в обычном теодолите, выполняется с помощью ручного привода. Визирная труба теодолита закреплена на теодолитной платформе (ТП), имеющей два подшипниковых узла по оси устанавливаемой горизонтально, которыми она опирается на алидаду теодолита. На этой оси ТП находится второй датчик угла теодолита (на фиг. не показан) осуществляющий отсчет углов наклона трубы плоскости, перпендикулярной наружной оси теодолита. На ТП установлены два наклономера теодолита (на фиг. не показаны) с осями чувствительности, направленными вдоль оси вращения трубы и вдоль оптической оси трубы. Второй наклономер необходим для установки в горизонтальную плоскость ребер призмы - оптического отражателя (13), который устанавливается на торце горизонтальной (внутренней) оси теодолита. Оптический отражатель предназначен для передачи азимута на устройства с активными оптическими элементами, чем расширяет функциональные возможности гирокомпаса с визуальным каналом. Развороты и точная наводка трубы вокруг горизонтальной оси аналогичны разворотам и наводке вокруг вертикальной оси. Оси теодолита снабжены сервоприводами. Предусмотрена возможность выставки перпендикулярности осей теодолита. На обеих осях устанавливаются скользящие токоподводы.
Сервоприводы позволяют:
- автоматически горизонтировать трубу теодолита по сигналам наклономеров;
- производить калибровку первого и второго датчиков угла на осях теодолита;
- разворачивать автоматически оси теодолита в полуприемах (между положениями круг-лево и круг-право);
- автоматически устанавливать трубу теодолита в измерительные положения во втором и последующих приемах теодолитных измерений, после проведения оператором первого, «обучающего» приема измерений.
Для установки на точку гирокомпас с визуальным каналом снабжен источником света, установленным в гироскопической части, тонкий луч которого направлен вертикально вдоль продольной оси штанги.
КП гироскопической части и теодолит имеют одну объединяющую их неподвижную вертикальную штангу с двумя датчиками угла. ДУ гироскопической части (8) находится внутри герметичного корпуса и определяет положение горизонтальной оси приборной платформы относительно него. Первый ДУ теодолита (9) фиксирует его положение относительно герметичного корпуса.
Каждый ДУ состоит из двух частей - позиционной и высокоточной.
Опорное устройство (10) в виде штатива (или кронштейна) для установки измерительного блока имеет столик с тремя опорными площадками, находящимися в одной плоскости, тремя подъемными винтами для вертикализации штанги гиротеодолита и три прижима, обеспечивающих неподвижность корпуса прибора во время разворотов ПП и теодолита.
Блок электронных приборов (БЭП) представляет из себя набор электронных блоков, который может быть размещен в герметичном корпусе с термостатированием. БЭП содержит электронные приборы, обеспечивающие функционирование чувствительных элементов, находящихся в измерительном блоке. Также БЭП содержит электронное устройство для обмена информацией между компьютером и чувствительными элементами и исполнительными органами в измерительном блоке. В БЭП введен блок теодолита, выполненный с возможностью приема сигнала с теодолита и преобразования его в цифровой сигнал для передачи в компьютер.
Компьютер предназначен для управления работой прибора путем подачи команд и управления приводами на осях карданова подвеса, опроса и накопления информации с чувствительного элемента с последующей ее обработкой и вычислением выходной величины в виде азимута наружной оси КП и нормали внешнего отражателя.
Заявляемое устройство работает следующим образом.
На БЭП подают питание от внешнего источника.
По командам с пульта обеспечивается подача внешнего питания на измерительный блок и БЭП, далее БЭП начинает работать в режиме ожидания команд от компьютера по интерфейсу и приему цифровой информации.
Производится установка наружной оси гироскопической части в вертикальное положение по сигналам наклономеров (2).
Устанавливают визирную ось визирной трубы теодолита в горизонтальную плоскость по сигналам наклономеров теодолита.
Посредством привода внутренней оси КП ось прецессии гироблока устанавливается в вертикальное положение.
Подают команду компьютеру провести грубое измерение азимута внутренней оси КП.
Далее производятся измерения сигналов ДУС F1 и датчика угла гироскопической части. Информация о сигнале ДУ поступает в компьютер и запоминается. Затем компьютер подает команды на разворот ДУС из исходного положения на 90° вокруг наружной оси КП и производит измерение сигнала ДУС F2, снимает отсчет ДУ. По результатам измерений сигналов в двух положениях компьютер рассчитывает приблизительное значение азимута вектора кинетического момента (h) ДУС в исходном положении по формуле: Ah=arctg F1/F2, где Ah - азимут вектора кинетического момента; F1,2, - сигналы ДУС.
Квадрант, в котором находится Ah определяется по знакам F. Таким образом, происходит привязка отсчетов датчика угла наружной оси КП к азимуту вектора кинетического момента, которая позволяет произвести измерение азимута с высокой точностью не только вектора кинетического момента ДУС, но и направления внутренней оси КП.
Далее производится установка гироблока в четыре известных измерительных положения для измерения азимута за исключением того, что в данном устройстве наружная ось расположена всегда вертикально и разворот происходит вокруг нее.
В первом и третьем измерительных положениях вектор h направлен приблизительно на север, во втором и четвертом - приблизительно на юг. Для установки ДУСа в первое положение из исходного необходимо развернуть его на угол равный азимуту наружной оси КП, определенному при грубом измерении. В первом и втором положениях ось прецессии ДУСа направлена вертикально вверх, в третьем и четвертом положении ось прецессии ДУСа направлена вертикально вниз. Перемещение ДУСа из второго в третье положение достигается путем разворота ДУСа в исходное, последующего разворота вокруг внутренней оси КП на 180 и разворота вектора h вокруг наружной оси КП на север по показаниям ДУ.
По результатам измерений в первом и втором положениях, определяется азимут вектора h в первом положении (первом полуприеме); по результатам измерений в третьем и четвертом положениях определяется азимут h в третьем положении (во втором полуприеме).
Далее компьютер рассчитывает азимут внутренней оси КП: рассчитываются азимуты внутренней оси при направлениях оси прецессии гироблока вверх и вниз в виде соответствующих сумм отсчета датчика угла и гироскопического азимута в первом и втором полуприемах, а искомый азимут внутренней оси вычисляется как среднее арифметическое этих сумм.
Для того, чтобы передать азимут внутренней оси гироскопической части на хранитель направления, на который наведена визирная труба, производится калибровка, при которой определяются отсчеты датчиков угла гироскопической части и первого ДУ теодолита, при которых внутренняя ось гироскопической части параллельна оптической оси визирной трубы. На первом этапе калибровки, определяются и запоминаются отсчеты датчиков угла гироскопической части и первого ДУ теодолита, при которых внутренняя ось гироскопической части параллельна внутренней оси поворота визирной трубы. Для этого наружная ось КП располагается горизонтально, после чего снимаются отсчеты с наклономеров и ДУ гироскопической части и первого ДУ теодолита. Разности отсчетов ДУ и наклономера, соответственно, гироскопической части и теодолита (9), дают отсчет ДУ, при котором соответствующая ось (внутренняя ось КП или внутренняя ось поворота визирной трубы) будет лежать в плоскости горизонта, то есть эти оси будут параллельны. Для учета негоризонтальности наружных осей теодолита и гироскопической части при калибровке снимаются отсчеты еще в двух измерительных положениях - втором и третьем. Второе измерительное положение: наружная ось горизонтальна, внутренняя ось обоих частей прибора развернута на 90, таким образом, чтобы очи чувствительности наклономеров были направлены вдоль наружной оси. Третье измерительное положение отличается от первого разворотом вокруг наружной оси на 180°. Полусумма сигналов наклономеров во втором и третьем положениях даст негоризонтальность наружной оси, которую нужно учесть в вычислении кодов ДУ, при которых внутренняя ось гироскопической части и внутренняя ось поворота визирной трубы параллельны: ϕ0=ϕДУ1-ϕнм1=ϕДУ1-arcsin(fHM1/(fm*cos(dN))), где ϕ0 - отсчет ДУ, при котором соответствующая внутренняя ось совпадает с другой внутренней осью, ϕДУ1 и ϕнм1 - отсчеты ДУ и угол отклонения оси чувствительности наклономера в первом измерительном положении, fНМ1 - сигнал наклономера в первом измерительном положении, fm - масштабный коэффициент наклономера, dN - негоризонтальность наружной оси при калибровке, для вычислений берутся отсчеты ДУ и наклономеров гироскопической части или теодолита соответственно. Далее, чтобы получить отсчеты датчиков угла гироскопической части и теодолита (9), при которых внутренняя ось гироскопической части совпадает с оптической осью визирной трубы, на втором этапе калибровки внутренняя ось выставляется вертикально и оптическая ось визирной трубы наводится на технологический отражающий элемент в четвертом измерительном положении. Для перехода в пятое измерительное положение производится разворот теодолита вокруг его наружной и внутренней осей на 180°, после чего труба снова наводится на технологический отражающий элемент. Вычисляется угол неперпендикулярности внутренней оси разворота визирной трубы и ее оптической оси: dϕ=0.5*(ϕДУ5-ϕДУ4). Окончательно получаем отсчет первого ДУ теодолита, при котором оптическая ось визирной трубы параллельна внутренней оси гироскопической части: Ф0=ϕ0+90°-dϕ.
Таким образом, заявлен гирокомпас с визуальным каналом, содержащий связанные между собой посредством соединительных электрических кабелей компьютер, блок электронных приборов и гироскопическую часть в виде герметичного корпуса, содержащего датчик угла (ДУ), карданов подвес (КП), приводы КП, термостат в котором установлены гироблок и наклономеры Отличительная особенность заключается в том, что в гирокомпас введен теодолит содержащий ручной привод и сервоприводы, два наклономера расположенных на визирной трубе теодолита и два датчика угла, теодолит расположен на штанге так, что наружная ось теодолита лежит на одной линии с продольной осью штанги, при этом на другом конце штанги установлена гироскопическая часть таким образом, что наружная ось КП жестко закреплена на штанге на одной линии с ее продольной осью с возможностью вращения рамы КП вокруг продольной оси штанги, на которой установлены первый ДУ теодолита и ДУ гироскопической части обеспечивающие, соответственно, фиксацию углов поворота зрительной трубы теодолита и рамы КП вокруг продольной оси штанги, второй ДУ теодолита осуществляет отсчет углов наклона трубы к плоскости перпендикулярной наружной оси теодолита, опорное устройство выполнено с возможностью установки продольной оси штанги в вертикальное положение; термостат установлен на внутренней оси КП, при этом на нем симметрично, относительно центра гироблока, встроены нагревательные элементы и термоэлектрические модули на элементах Пельтье; в блок электронных приборов введен блок теодолита, выполненный с возможностью приема сигнала с теодолита и передачи цифрового сигнала в компьютер.
Отличительной особенностью также является то, что блок электронных приборов размещен в герметичном корпусе с термостатированием и на торце внутренней оси теодолита установлен оптический отражатель.
Техническим результатом заявленного изобретения является:
- расширение функциональных возможностей и повышение точности измерений благодаря тому, что вектор азимута на внешний хранитель направления передается напрямую без дополнительных приборов;
- расширение допустимых температурных условий внешней среды, за счет введения терморегуляции на элементах Пельтье.
Многоканальный преобразователь напряжений в шим-сигналы
Волоконно-оптический измеритель угловой скорости
Способ определения параметров модели погрешностей измерений акселерометров инерциальной навигационной системы по измерениям спутниковой навигации
Способ определения параметров модели погрешностей измерений акселерометров ведомой инерциальной навигационной системы по измерениям эталонной инерциальной навигационной системы
Приемопередатчик последовательного интерфейса с элементом гальванической развязки
Стенд для измерения вибрационных реактивных моментов гиромотора
Термоинвариантный измеритель линейного ускорения
Формирователь временных интервалов
Порошковый композиционный материал акп-1пк и способ его получения
Способ измерения динамических характеристик кварцевого маятникового акселерометра (варианты)
Способ калибровки чувствительных элементов бесплатформенной инерциальной навигационной системы в полете
Многоканальный преобразователь напряжений в шим-сигналы
Универсальный широкодиапазонный стенд для контроля измерителей угловой скорости
Способ определения параметров модели погрешностей измерений акселерометров инерциальной навигационной системы по измерениям спутниковой навигации
Способ определения параметров модели погрешностей измерений акселерометров ведомой инерциальной навигационной системы по измерениям эталонной инерциальной навигационной системы
Стенд для измерения вибрационных реактивных моментов гиромотора
Устройство передачи электрической энергии в ракетно-космических комплексах (варианты)
Порошковый композиционный материал акп-1пк и способ его получения
Преобразователь угла поворота вала в код
Двухкоординатный фотоэлектрический цифровой автоколлиматор

