Результат интеллектуальной деятельности: УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ
Вид РИД
Изобретение
Изобретение относится к измерительной технике, а именно, к средствам контроля датчиков угловой скорости (ДУС).
Известен широкодиапазонный стенд [12] для контроля измерителей угловой скорости, содержащий корпус, вал, установленный в корпусе с возможностью вращения, закрепленную на валу основную платформу для установки измерителя угловых скоростей, электродвигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов, причем датчик положения имеет один вход и два выхода, а двигатель бесконтактный имеет два входа; усилитель мощности электродвигателя постоянного тока, содержащий предварительный усилитель с одним входом и одним выходом и два усилителя мощности, каждый из которых имеет один вход и один выход, причем выход предварительного усилителя соединен с входом датчика положения, один выход которого соединен с входом первого усилителя мощности, а второй выход с входом второго усилителя мощности, выход каждого усилителя мощности соединен с соответствующей обмоткой двигателя бесконтактного; четыре датчика Холла и взаимодействующий с ними магнит, кольцевой коллектор, состоящий из коллекторной втулки и щеток для подвода питания, дополнительную платформу, закрепленную на валу, шесть кварцевых маятниковых акселерометров, гироскопический датчик угловой скорости, цилиндрическую втулку, стержень, ленточный торсион, упругий торцевой токоподвод, два геркона, взаимодействующий с герконами магнит, механизм отслеживания, компьютер, аналоге - цифровой преобразователь, плату цифровых портов ввода - вывода, усилитель системы стабилизации с сумматором, входящим в его состав, блок управления механизмом отслеживания, причем гироскопический датчик угловой скорости и акселерометры закреплены на дополнительной платформе, оси чувствительности трех акселерометров для измерения тангенциального ускорения перпендикулярны соответствующим радиусам дополнительной платформы, а оси чувствительности трех акселерометров для измерения центростремительного ускорения ориентированы вдоль соответствующих радиусов дополнительной платформы, каждый акселерометр содержит кварцевую пластину, емкостной датчик угла и магнитоэлектрический датчик момента, соединенные последовательно через соответствующие усилители обратной связи, каждый из которых содержит предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур и усилитель мощности, гироскопический датчик угловой скорости содержит датчик угла и датчик момента, соединенные последовательно через усилитель обратной связи, содержащий предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур и усилитель мощности, а ось чувствительности гироскопического датчика угловой скорости параллельна оси вала, упругий торцевой токоподвод содержит верхнюю и нижнюю колодки и золотые проводники подвода питания, прикрепленные к колодкам, два геркона закреплены на нижней колодке с обеспечением угла 8 градусов между контактами герконов, магнит закреплен на верхней колодке в среднем положении между контактами герконов, цилиндрическая втулка подвешена в корпусе на шарикоподшипниковых опорах соосно с валом, проходящим внутри цилиндрической втулки, верхняя колодка упругого торцевого токоподвода закреплена на валу, а нижняя колодка - на цилиндрической втулке, вал выполнен полым на одном участке своей длины, ленточный торсион размещен в полости вала и прикреплен нижним концом к торцу полого участка вала, а верхним концом к середине стержня, который расположен перпендикулярно оси вала, проходит через отверстия цилиндрического полого участка вала и прикреплен двумя концами к торцам цилиндрической втулки, жестко соединенной с коллекторной втулкой, механизм отслеживания содержит импульсный шаговый двигатель и зубчатую передачу, при этом шаговый двигатель прикреплен к корпусу через амортизатор, выходное звено зубчатой передачи закреплено на цилиндрической втулке соосно с ней, блок управления механизмом отслеживания имеет два входа, соединенных с герконами, и четыре выхода, соединенных с обмотками импульсного шагового двигателя, причем для регистрации угла разворота платформы в фиксированных точках четыре датчика Холла располагаются через каждые 90° на корпусе стенда, а взаимодействующий с ними магнит - на основной платформе стенда [7, 12]. Недостатки аналога заключаются в следующем.
1. Акселерометры, измеряющие центростремительное ускорение точек их крепления к платформе стенда, используемые в высокоскоростном режиме как измерители угловой скорости, измеряли квадрат угловой скорости (ац=ω2·R), что приводило к зависимости полосы пропускания и величины масштабного коэффициента стенда от угловой скорости, это приводило к необходимости обеспечивать калибровку установки в каждом скоростном диапазоне;
2. Так как фотоэлектрические муаровые датчики угла имеют динамические ошибки, возрастающие при увеличении угловой скорости свыше 30°/с, то их применение в данной конструкции стенда было нецелесообразным, а в качестве измерителей угла использовались четыре датчика Холла, позволяющие точно фиксировать угол через каждые 90° при условии совершения платформой стенда полного оборота, однако точное значение угла в любой точке разворота платформы получить прямым способом измерения было невозможно [12].
3. Стенд обладал аналоговой обратной связью, что исключало ее модернизацию без изменения элементной базы и структуры, а, соответственно, в конечном счете при изменении каких - либо параметров стенда (как, например, момента инерции платформы, корректировки динамических свойств системы управления), требовало разработки новой математической модели и проектирования нового электронного устройства, обеспечивающего устойчивость стенда как системы автоматического управления.
4. Стенд имел возможность задания либо постоянных по величине и направлению, либо гармонически изменяющихся угловых скоростей, но не имел возможности программного задания угловых колебаний платформы по любому требуемому закону.
5. ЭВМ в стенде являлась регистрирующим, но не управляющим устройством, что было обусловлено развитием вычислительной техники в момент подачи заявки на аналог, а также недостаточными ресурсами процессора, это значительно ограничивало возможности стенда.
Известен стенд для контроля прецизионных датчиков угловых скоростей, содержащий основание для закрепления на нем с возможностью вращения вокруг измерительной оси стенда контролируемого измерителя угловой скорости с датчиками угла и момента, соединенными через усилитель обратной связи и расположенными по выходной оси датчика угловой скорости, коллектор подвода питания к контролируемому датчику угловой скорости, задатчик эталонного напряжения, сумматор и усилитель стабилизации, соединенные последовательно, фотоэлектрический муаровый датчик угла, расположенный на оси вращения стенда, фазовый интерполятор и блок преобразования информации фотоэлектрического датчика угла, соединенные последовательно, блок преобразования информации датчика угловой скорости, электродвигатель постоянного тока, выполненный по бесконтактной схеме синусно-косинусного вращающего трансформатора, когда вход блока преобразования информации датчика угловой скорости и первый вход сумматора соединены с выходом усилителя обратной связи, а выход задатчика эталонного напряжения соединен со вторым входом сумматора, причем первый, второй и третий выходы усилителя стабилизации соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены со вторым и третьим входами усилителя стабилизации [7, 17]. Таким образом стенд был построен по аналогии с одноосным гироскопическим стабилизатором, работающем в режиме пространственного разворота и датчиком угловой скорости в качестве инерциального чувствительного элемента, где контролируемый ДУС одновременно являлся и чувствительным элементом, и испытуемым прибором, т.е. находился в режиме «самоконтроля».
Недостатки аналога заключались в следующем. Стенд был предназначен для контроля ДУС только одного типа - электромеханических датчиков угловой скорости с электрической обратной связью, а испытания измерителей угловой скорости иного класса и принципа действия, таких как лазерные, волоконно-оптические, волновые твердотельные и др., на данном стенде были невозможны.
Стенд рассчитывался как единая двухконтурная аналоговая система автоматического управления, т.е. «самоконтролю» могли подвергаться электромеханические измерители угловой скорости лишь одного типа с неизменной структурой регулятора. Контроль электромеханического ДУС другого типа с иной структурой регулятора требовал пересчета всей системы управления. Остальные недостатки аналога соответствуют пунктам 2-5 рассмотренного выше технического решения.
В качестве прототипа к заявляемому принят наиболее близкий по совокупности существенных признаков широкодиапазонный стенд для контроля измерителей угловых скоростей [9, 13], содержащий корпус, вал, установленный в корпусе с возможностью вращения, закрепленную на валу основную платформу для установки измерителя угловых скоростей, электродвигатель постоянного тока, усилитель мощности, кольцевой коллектор, состоящий из коллекторной втулки и щеток для подвода питания, дополнительную платформу, закрепленную на валу, шесть акселерометров линейных ускорений, три из которых измеряют тангенциальное, а три - центростремительное ускорения точек их крепления к платформе стенда, оси чувствительности которых расположены под углами 120° друг относительно друга для каждой тройки акселерометров, причем каждый из акселерометров имеет датчик угла, датчик момента и усилитель обратной связи, измерительный гироскопический датчик угловой скорости с сервисной электроникой, ось чувствительности которого совмещена с осью вращения вала, цилиндрическую втулку, стержень, ленточный торсион, упругий торцевой токоподвод, два геркона, взаимодействующий с герконами магнит, механизм отслеживания, причем упругий торцевой токоподвод содержит верхнюю и нижнюю гетинаксовые колодки и золотые проводники подвода питания, прикрепленные к колодкам, два геркона закреплены на нижней колодке с обеспечением угла 8 градусов между контактами герконов, магнит закреплен на верхней колодке в среднем положении между контактами герконов, цилиндрическая втулка подвешена в корпусе на шарикоподшипниковых опорах соосно с валом, проходящим внутри цилиндрической втулки, верхняя колодка упругого торцевого токоподвода закреплена на валу, а нижняя колодка - на цилиндрической втулке, вал выполнен полым на одном участке своей длины, ленточный торсион размещен в полости вала и прикреплен нижним концом к торцу полого участка вала, а верхним концом к середине стержня, который расположен перпендикулярно оси вала и проходит через отверстия цилиндрического полого участка вала, он прикреплен двумя концами к торцам цилиндрической втулки, жестко соединенной с коллекторной втулкой, механизм отслеживания содержит импульсный шаговый двигатель и зубчатую передачу, при этом шаговый двигатель прикреплен к корпусу через амортизатор, выходное звено зубчатой передачи закреплено на цилиндрической втулке соосно с ней, блок управления механизмом отслеживания имеет два входа, соединенных с герконами, и четыре выхода, соединенных с обмотками импульсного шагового двигателя, причем выходы левого и правого герконов, закрепленных на нижней колодке упругого торцевого токоподвода, соединены, соответственно, с первым и вторым входом микроконтроллера, входящего в состав блока управления механизмом отслеживания стенда, состоящего из микроконтроллера, драйвера управления и усилителя мощности, а четыре выхода микроконтроллера соединены с четырьмя входами драйвера управления, четыре выхода которого соединены с четырьмя входами усилителя мощности, четыре выхода которого, в свою очередь, соединены с четырьмя соответствующими обмотками шагового двигателя механизма отслеживания стенда, порт ввода - вывода микроконтроллера соединен с пятым портом ввода - вывода управляющего процессора, при этом микроконтроллер находится в режиме обмена с процессором через стандартный интерфейс; управляющий процессор, содержащий в том числе порты ввода-вывода и ядро с дополнительной периферией, аналого-цифровой и цифроаналоговые преобразователи, которые могут быть как встроенными в процессор, так и внешними устройствами по отношению к процессору; вход предварительного усилителя мощности соединен с выходом цифроаналогового преобразователя, соединенного своим входом с первым портом ввода-вывода управляющего процессора; управляющий компьютер, находящийся в режиме обмена через стандартный интерфейс с третьим портом ввода-вывода управляющего процессора; угловой энкодер, содержащий диск и две считывающие оптические головки, которые через преобразователь сигнала соединены с четвертым портом ввода-вывода управляющего процессора, причем для съема информации применена пара считывающих оптических головок, расположенных под углом 180°, для исключения влияния эксцентриситетов крепления диска углового энкодера на выходную информацию об угловом положении платформы стенда.
Недостатки прототипа заключаются в следующем:
1. Моменты трения по оси вращения вала имели две составляющие: момент трения в шарикоподшипниковых опорах подвеса вала и момент трения в щетках коллектора. Механизм отслеживания обеспечивал разгрузку шарикоподшипниковых опор от веса платформы, что минимизировало первую составляющую момента трения, однако, коллектор подвода питания имел, как правило, много колец, некоторые из которых должны были быть рассчитаны на значительные величины токов, что создавало значительную величину второй составляющей момента от трения щеток и колец подвода питания.
2. Точностные характеристики стенда зависели от точностных характеристик инерциальных чувствительных элементов и в случае их замены требовались изменение конструкции стенда и пересчет дискретных регуляторов.
3. В случае испытания на стенде измерителя угловой скорости более высокого класса точности, нежели инерциальные чувствительные элементы, возрастали погрешности в определении масштабного коэффициента контролируемого прибора.
Задачей изобретения является расширение функциональных возможностей стенда, универсализация его конструкции и снижение моментов трения, действующих по оси вращения вала, обеспечивающего повышение точности воспроизведения угловых скоростей.
Поставленная задача достигается тем, что в универсальный широкодиапазонный стенд для контроля измерителей угловой скорости, содержащий корпус, вал, установленный в корпусе с возможностью вращения, закрепленную на валу основную платформу, на которой установлен контролируемый измеритель угловых скоростей (испытуемый прибор), электродвигатель постоянного тока, первый усилитель мощности (УМ1); кольцевой коллектор, дополнительную платформу, закрепленную на валу, на которой установлены шесть акселерометров, первая тройка из которых обеспечивает измерение тангенциального, а вторая тройка - центростремительного ускорения, оси чувствительности которых расположены под углами 120° друг относительно друга для каждой тройки акселерометров, измерительный датчик угловой скорости (ИУС), ось чувствительности которого совмещена с осью вращения вала; цилиндрическую втулку, стержень, ленточный торсион, упругий торцевой токоподвод, два геркона, магнит, механизм отслеживания, причем токоподвод содержит верхнюю и нижнюю колодки, и золотые проводники подвода питания, прикрепленные к колодкам, два геркона, закрепленные на нижней колодке и образующие угол, при котором исключена возможность разрыва или замыкания проводников токоподвода, взаимодействующий с герконами магнит закреплен на верхней колодке между контактами герконов, цилиндрическая втулка подвешена в корпусе на шарикоподшипниковых опорах соосно с валом, проходящим внутри втулки, верхняя колодка токоподвода закреплена на валу, а нижняя колодка - на цилиндрической втулке, вал выполнен полым на одном участке своей длины, ленточный торсион размещен в полости вала и прикреплен нижним концом к торцу полого участка вала, а верхним концом к середине стержня, который расположен перпендикулярно оси вала, проходит через отверстия цилиндрического полого участка вала и прикреплен двумя концами к торцам цилиндрической втулки, жестко соединенной с втулкой коллектора, механизм отслеживания, содержащий импульсный шаговый двигатель и зубчатую передачу, при этом шаговый двигатель прикреплен к корпусу через амортизатор, выходное звено зубчатой передачи закреплено на цилиндрической втулке соосно с ней; блок управления механизмом отслеживания, состоящий из первого микроконтроллера, драйвера управления и второго усилителя мощности (УМ2); управляющего процессора, причем выходы левого и правого герконов соединены, соответственно, с первым и вторым входом первого микроконтроллера (МК1), при этом четыре выхода МК1 соединены с четырьмя входами драйвера управления, четыре выхода которого соединены с четырьмя входами УМ2, четыре выхода которого соединены с четырьмя соответствующими обмотками шагового двигателя, порт ввода-вывода (ПВВ) МК1 соединен с ПВВ5 управляющего процессора; вход УМ1 соединен с выходом цифроаналогового преобразователя, соединенного своим входом с ПВВ1 управляющего процессора; управляющий компьютер, ПВВ2 которого связан с ПВВ3 управляющего процессора через стандартный интерфейс; угловой энкодер, содержащий диск и две считывающие оптические головки, которые через первый преобразователь сигнала соединены с ПВВ4 управляющего процессора, причем указанные головки расположены под углом 180°, выход контролируемого измерителя угловых скоростей связан с входом второго преобразователя сигнала (через коллектор или дистанционно). Отличительной особенностью предлагаемого технического решения является то, что в стенд введены; блок преобразования напряжения питания (БПНП), блок преобразования информации (БПИ), содержащий семиканальный аналого-цифровой преобразователь (АЦП), программируемую логическую интегральную схему (ПЛИС), шину БПИ и второй микроконтроллер (МК2) с передатчиком, закрепленные на дополнительной платформе; приемник сигналов, закрепленный неподвижно на основании стенда, при этом вход преобразователя напряжения питания через линии упругого торцевого токоподвода и контакты коллектора соединен с выходом стационарного источника питания, а выходы преобразователя напряжения соединены с соответствующими входами БПИ и МК2, закрепленных на валу; входы шины БПИ соединены с выходами ИУС и каждого из шести акселерометров, с первого по седьмой выходы шины БПИ соединены соответственно, с первым по седьмой входами ПЛИС, а выходы с восьмого по четырнадцатый шины БПИ соединены, соответственно, с первым по седьмой входами АЦП; выходы с первого по седьмой ПЛИС соединены с первым по седьмой входами МК2, а выходы с первого по седьмой АЦП соединены, соответственно, с восьмым по четырнадцатый входами МК2; выход приемника сигнала соединен с ПВВ2 управляющего процессора.
Совокупность существенных признаков, характеризующих заявляемое техническое устройство, позволяет в сравнении с прототипом достигнуть технический результат, заключающийся в следующем:
1. Обеспечивается универсальность стенда, так как без конструктивных изменений, только за счет перепрограммирования процессора, можно обеспечить использование в качестве инерциальных чувствительных элементов стенда измерителей угловых скоростей и кажущихся линейных ускорений любого физического принципа действия;
2. Уменьшены моменты трения в оси вращения стенда, т.е. повышена стабильность задания угловой скорости за счет исключения из конструкции стенда информационных колец токоподводящего коллектора (оставлены два кольца для подвода питания) и введения в систему управления стенда беспроводной системы съема и передачи информации с помощью радиочастотных или инфракрасных информационных средств.
3. Исключена зависимость точностных характеристик стенда от типов инерциальных чувствительных элементов, примененных в качестве измерительных датчика угловой скорости и кажущихся линейных ускорений.
4. Применение радиочастотного или инфракрасного информационного канала позволяет существенно сократить число соединений в электрической схеме стенда, и при этом исключаются ошибки передачи данных, возникающие вследствие возможной потери контакта в щеточном узле токоподводящего коллектора.
5. Применение углового энкодера в качестве управляющего устройства и введение рассчитанного эталонного значения угловой скорости в контур управления позволяет организовать дополнительную обратную связь по угловой скорости, а, соответственно, улучшить точностные характеристики стенда за счет организации управления от датчиков, имеющих различную физическую природу действия.
6. Применение углового энкодера в качестве управляющего устройства позволяет обеспечить третий режим работы стенда на высоких скоростях до 10000°/с, когда управление осуществляется по сигналам с углового энкодера и трех акселерометров, измеряющих тангенциальное ускорение точек их крепления к платформе стенда.
7. Конструкция стенда позволяет осуществлять не только контроль испытуемых приборов, закрепленных на его платформе, но и «самоконтроль» инерциальных чувствительных элементов - измерителей угловых скоростей любого класса и принципа действия.
8. Конструкция стенда позволяет осуществлять контроль акселерометров в случае использования в системе управления стендом двух акселерометров, измеряющих центростремительное ускорение точек их крепления к платформе стенда, третий акселерометр может использоваться в качестве испытуемого прибора, т.е. стенд может выполнять роль центрифуги.
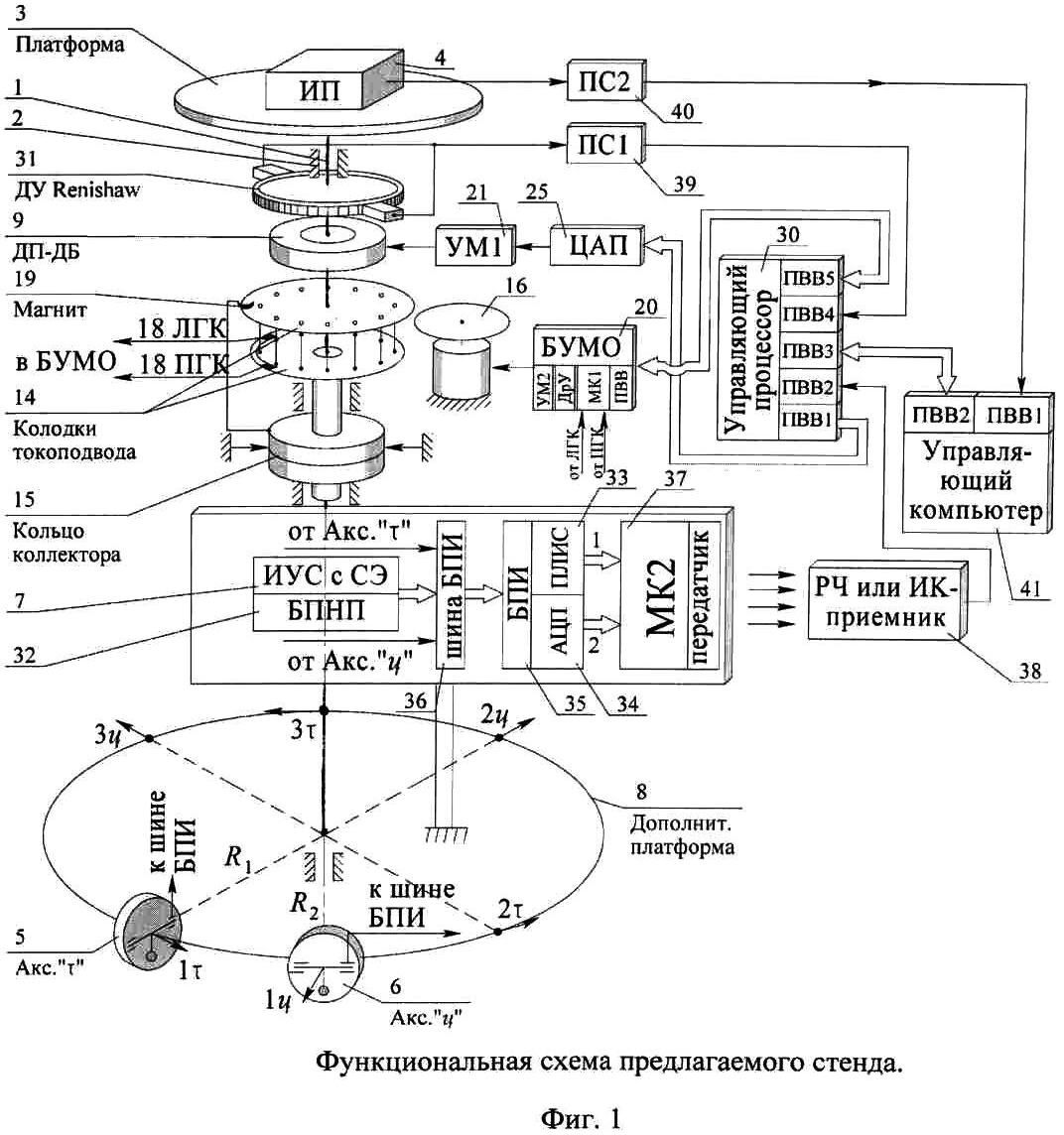
На фиг.1 представлена функционально - кинематическая схема предлагаемого стенда.
Предлагаемое устройство содержит корпус (на фиг.1 не показан), вал 1, имеющий ось вращения относительно корпуса, реализованную на шарикоподшипниках 2, которая является выходной осью стенда. На валу 1 закреплена платформа 3, на которой установлен контролируемый измеритель угловых скоростей (испытуемый прибор) 4. На валу 1 закреплена дополнительная платформа 8, на которой размещены все чувствительные элементы стенда: акселерометры 5, 6 и измерительный датчик угловой скорости - 7. При этом акселерометры 5 в количестве трех закреплены так, что измеряют тангенциальное ускорение. Для этих акселерометров введены обозначения 1τ, 2τ, 3τ. В дальнейшем эти акселерометры (1τ, 2τ, 3τ) будут называться тангенциальными. Оси чувствительности акселерометров 5 лежат в плоскости дополнительной платформы 8 перпендикулярно радиусам R-1 акселерометров 5. Радиусы R1 акселерометров 5 (1τ, 2τ, 3τ) расположены под углами 120° друг к другу. Акселерометры 6 в количестве трех закреплены на дополнительной платформе 8 так, что измеряют центростремительное ускорение. Для этих акселерометров введены обозначения 1ц, 2ц, 3ц. В дальнейшем эти акселерометры (1ц, 2ц, 3ц) будут называться центростремительными. Оси чувствительности акселерометров 6 расположены в плоскости дополнительной платформы 8 коллинеарно радиусам R2=R1 акселерометров 6 в сторону, противоположную действию центростремительного ускорения. Радиусы R2 акселерометров 6 (1ц, 2ц, 3ц) расположены под углами 120° друг к другу. В качестве акселерометров 5 и 6, измеряющих, соответственно, тангенциальное или центростремительные ускорения точек их крепления к платформе стенда могут быть использованы прецизионные измерители линейных ускорений любого типа (кварцевый маятниковый, кремниевый маятниковый, поплавковый, струнный). В качестве измерительного датчика угловой скорости (ИУС) 7 могут быть использованы поплавковый гироскопический датчик угловой скорости (ДУС), волоконно-оптический гироскоп (ВОГ), лазерный гироскоп (ЛГ), волновой твердотельный гироскоп (ВТГ), динамически настраиваемый гироскоп (ДНГ) со своей сервисной электроникой. ИУС 7 закреплен на платформе 8 так, что ось его чувствительности параллельна оси вращения стенда (оси вала 1) (в случае использования всех перечисленных типов гироскопов), а вектор кинетического момента Н параллелен плоскости платформы 8 (в случае использования ДУС и ДНГ). На валу 1 закреплена подвижная часть электродвигателя постоянного тока ДП-ДБ 9, состоящего из датчика положения ДП (9.1) и двигателя бесконтактного ДБ (9.2) Неподвижные части датчика положения (ДП) и двигателя бесконтактного (ДБ) соединены в одном корпусе, жестко закрепленном на корпусе стенда. Датчик положения (ДП) 9.1 представляет собой синусно-косинусный вращающий трансформатор с безобмоточным ротором (С1-С2 - обмотка возбуждения, С3-С4 - синусная обмотка, С5-С6 - косинусная обмотка). Двигатель бесконтактный 9.2 также имеет косинусную и синусную обмотки (С1-С2 и С3-С4) [13].
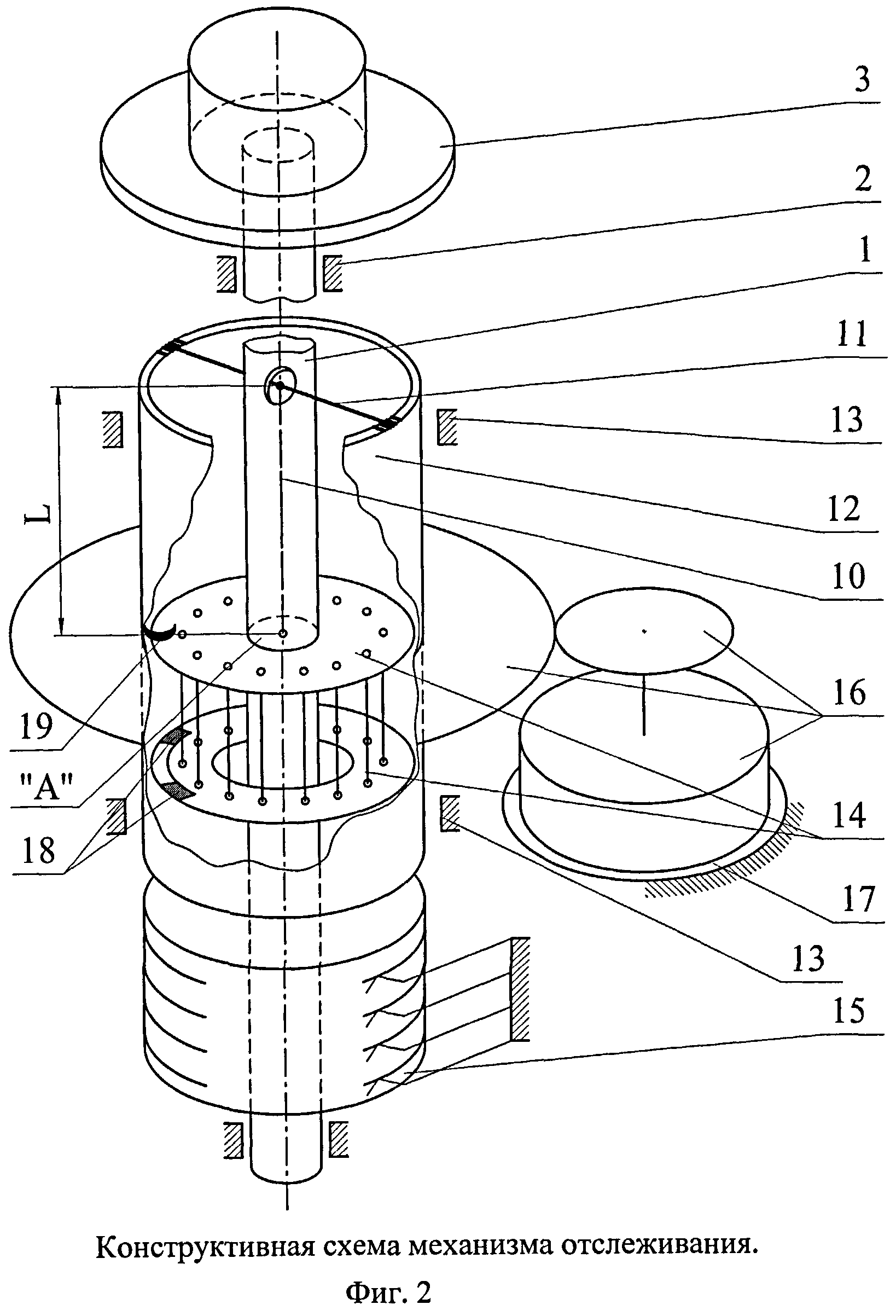
На фиг.2 представлена детализированная конструктивная схема соединения вала 1 с элементами, закрепленными на нем (ниже ДП-ДБ 9).
Вал 1 выполнен в виде трубы на длине L, которая соединена в единую строго соосную систему с верхней и нижней частями вала 1, имеющими сплошное сечение.
К торцу «А» полого участка вала 1 жестко прикреплен нижний конец торсиона 10, верхний конец которого жестко соединен со стержнем 11, расположенным горизонтально и своими концами соединенным жестко со втулкой 12. Стержень 11, располагаясь горизонтально, проходит через два отверстия полого участка вала 1, ось которых перпендикулярна оси вала 1, а диаметр отверстий допускает относительный разворот стержня 11 и вала 1 на углы, при которых исключен обрыв или замыкание проводников токоподвода (в опытном образце ±4°). В опытном образце ленточный торсион 10 имеет длину 200 мм и поперечное сечение b=4 mm, h=0,2 мм. Втулка 12 полая, подвешена в корпусе стенда на двух шарикоподшипниках 13. Внутри втулки 12 размещен торцевой упругий токоподвод 14 (на фиг.1 размещение токоподвода 14 показано условно, на фиг.2 это размещение соответствует конкретному исполнению).
Токоподвод 14 состоит из двух колодок с отверстиями, через которые проходят золотые проводники, концы которых закрепляются на торце каждой колодки. Проводники образуют цилиндрическую поверхность и в исходном положении колодок параллельны друг другу. Конструкции таких торцевых упругих токоподводов широко используются в гироскопическом приборостроении для подвода питания к элементам на осях карданова подвеса гироприборов [5]. Верхняя колодка токоподвода 14 жестко связана с валом 1, нижняя колодка токоподвода 14 жестко связана со втулкой 12. Со втулкой 12 жестко соединена втулка кольцевого многодорожечного коллектора 15, на которой выполнены золоченые кольцевые контактные дорожки. Щетки коллектора 15 жестко связаны с корпусом стенда. Со втулкой 12 соединено зубчатое колесо - выходное звено механизма отслеживания 16, содержащего одну зубчатую передачу с коэффициентом передачи i=10 и шаговый двигатель. В качестве шагового двигателя механизма отслеживания 16 применен шаговый двигатель ДШИ-200-1 реверсивный с электронным управлением, большим моментом на валу (2500 г·см без учета редукции) и магнитной фиксацией заданного углового положения. Конструкция таких шаговых двигателей описана в литературе [15, 16].
Механизм отслеживания 16 крепится к корпусу стенда через амортизирующую резиновую прокладку 17. На нижней колодке токоподвода 14 закреплены два геркона (герметичных контакта) 18, на верхней колодке токоподвода закреплен магнит 19. Герконы 18 расположены на одной окружности и под углом, при котором исключен обрыв проводников токоподвода (угол образуют линии проведенные от герконов до центра окружности; в опытном образце угол равен 8°). Магнит 19, закрепленный на верхней колодке токоподвода 14, находится в среднем положении между контактами. Магнит 19 и пара герконов 18 предназначены для регистрации углов положения и рассогласования верхней и нижней колодок токоподвода.
Для управления шаговым двигателем механизма отслеживания 16 служит блок управления механизмом отслеживания (БУМО) 20.
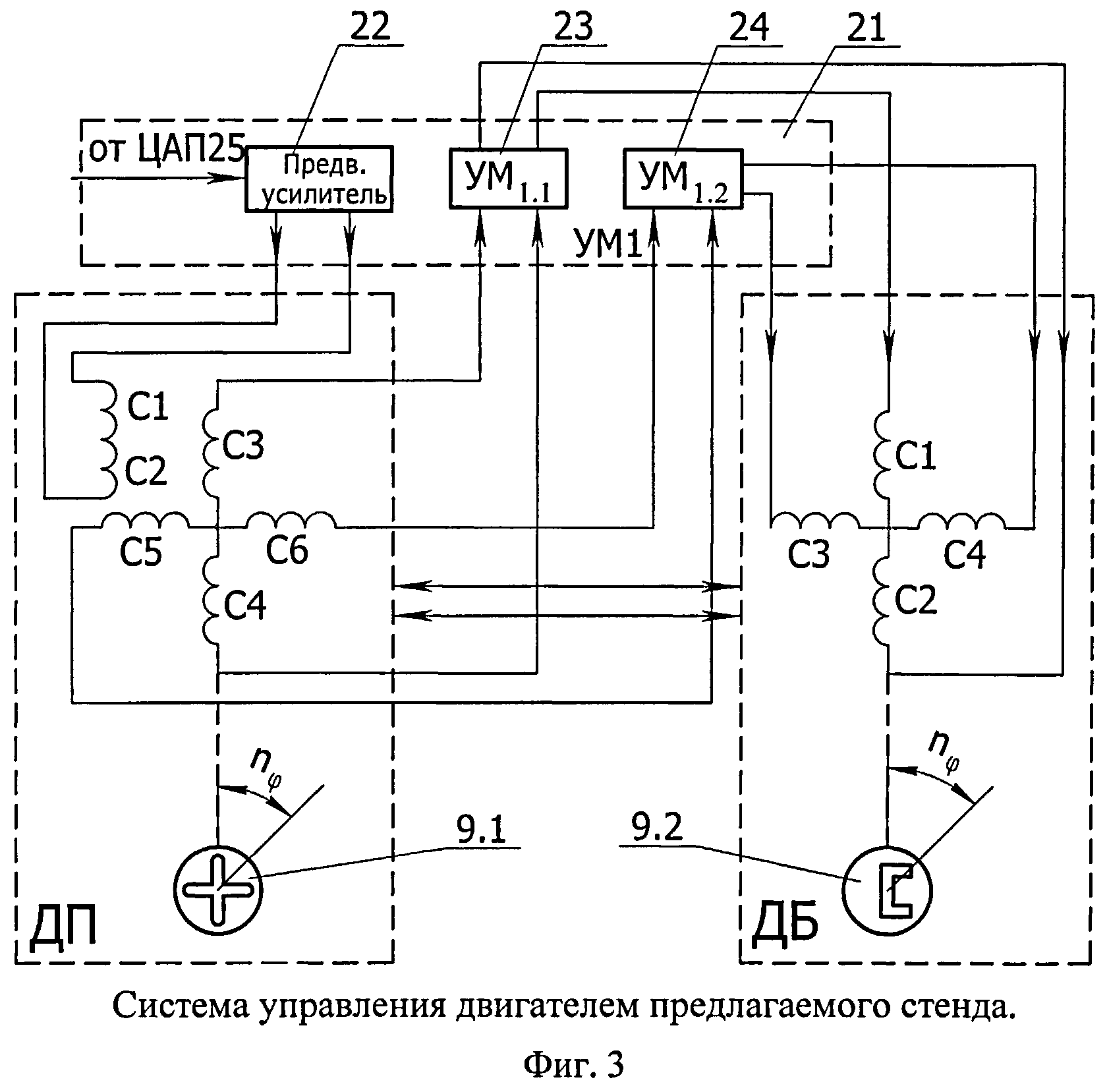
На фиг.3 показана система управления двигателем предлагаемого стенда, принцип работы которой описан в прототипе [13].
Первый усилитель мощности (УМ1) 21 содержит предварительный усилитель 22 и два идентичных каскада усилителя мощности - УМ1.1 23 и УМ1.2 2 24. Предварительный усилитель 22 предназначен для модуляции и усиления постоянного сигнала, поступающего от ЦАП 25, выполнен на базе операционного усилителя с применением в качестве ключевых элементов полевых транзисторов. Каждый из усилителей УМ1.1 23 и УМ1.2 24 представляет собой соединение устройств для детектирования, коррекции и усиления сигналов, т.е. состоит из модулятора, корректирующего устройства и усилителя мощности, реализованных на операционных усилителях с отрицательной обратной связью [1, 4, 14].
Каскады УМ1 21 - УМ1.1 23 и УМ1.2 24 и ДП-ДБ 9 соединены следующим образом. Выход предварительного усилителя (ПУ) 22 соединен с обмоткой возбуждения С1-С2 ДП. Обмотка ДП С3-С4 соединена с входом каскада УМ1.1, а обмотка С5-С6 соединена с входом каскада УМ1.2. Выходы каскадов УМ1.1 и УМ1.2 соединены, соответственно, с синусной и косинусной обмотками С1-С2 и С3-С4 ДБ.
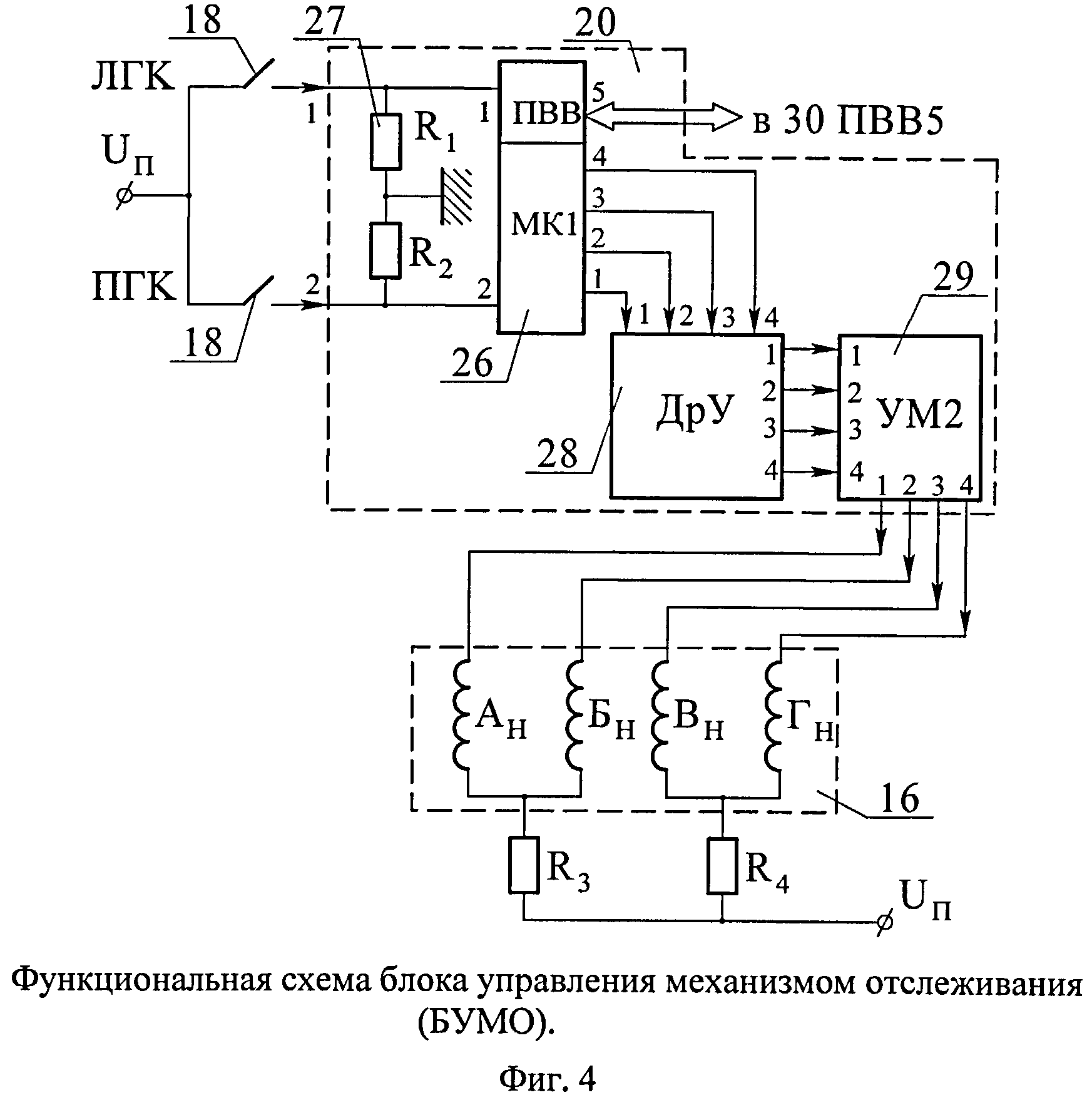
На фиг.4 представлена структурная схема блока управления механизмом отслеживания (БУМО) 20, который содержит устройство управления 26, в качестве которого может быть использован первый микроконтроллер (МК1), первый и второй входы которого соединены, соответственно, с левым и правым герконами 18. На входах МК1 26 подключены шунтирующие резисторы 27 (R1 и R2) для исключения ложных срабатываний МК1 26 при разомкнутых герконах. МК1 26 содержит в своем составе генератор импульсов и порт ввода - вывода (ПВВ МК1). Четыре выхода МК1 26 соединены с четырьмя входами драйвера управления (ДрУ) 28, предназначенного для формирования требуемой последовательности коммутации обмоток шагового двигателя. Четыре выхода ДрУ 28 соединены с четырьмя входами второго усилителя мощности (УМ2) 29, четыре выхода последнего соединены с обмотками Ан, Бн, Вн, Гн шагового двигателя механизма отслеживания 16. Резисторы R3 и R4 - балансировочные. Порт ввода - вывода МК1 (ПВВ МК1) 26 БУМО 20 соединен с пятым портом ввода - вывода (ПВВ5) управляющего процессора 30 и находится с ним в режиме обмена через стандартный интерфейс.
На валу 1 (фиг.1) закреплен диск углового энкодера 31, считывающие головки которого закреплены на корпусе стенда. На дополнительной платформе, закрепленной на валу, установлены: блок преобразования напряжения питания (БПНП) 32, вход которого через линии упругого торцевого токоподвода 14 и контакты коллектора 15 соединен с выходом стационарного источника питания (источник на фиг.1 не показан), а выходы БПНП 32 соединены (соединение на фиг.1 не показано) с соответствующими входами (входами питания) блока преобразования информации (БПИ) и МК2.
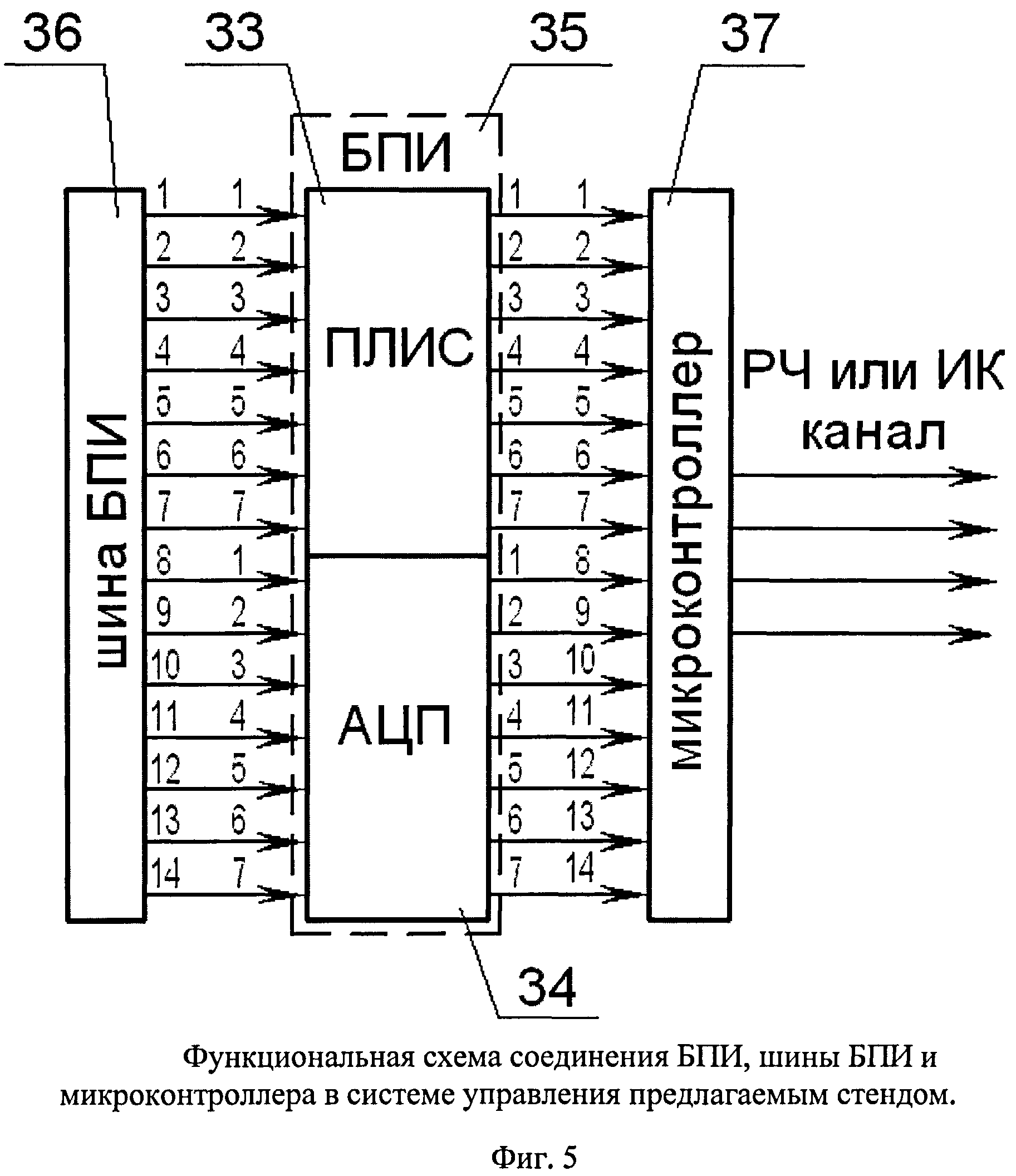
На фиг.5 показана схема соединения закрепленных на дополнительной платформе, БПИ 35 с шиной 36 и МК2 37.
В состав БПИ 35 входят программируемая логическая интегральная схема (ПЛИС) 33 и семиканальный аналоге - цифровой преобразователь (АЦП) 34. Входы шины 36 БПИ (семь входов), соединены соответственно с выходом ИУС 7 и выходами акселерометров 5 и 6, а выходы шины БПИ 36 с первого по седьмой соединены соответственно с первым по седьмой входами ПЛИС 33 БПИ 35, соответственно, выходы с восьмого по четырнадцатый шины БПИ 36 соединены, соответственно, с первым по седьмой входами АЦП 34; выходы с первого по седьмой ПЛИС 33 БПИ 35 соединены с первым по седьмой входами МК2 37, а выходы с первого по седьмой АЦП 34 БПИ 35 соединены, соответственно, с восьмым по четырнадцатый входами МК2 37. МК2 выполнен с интерфейсом (передатчиком), обеспечивающим передачу информации в последовательном коде по инфракрасному или радиочастотному каналу (фиг.1). Закрепление на платформе стенда плат, реализующих перечисленные блоки, а также применение радиочастотного или инфракрасного канала для информационного обмена позволяют сократить число линий коллектора, необходимых для подвода питания к БПНП, что повышает точностные характеристики стенда, обусловленные:
- снижением момента трения от коллектора на оси вращения платформы, т.е. повышается стабильность задания угловой скорости;
- уменьшением длины линий электрических цепей от ИУС 7 и акселерометров 5 и 6 до электронного блока системы управления и уровня помех, поскольку не требуется передача маломощных сигналов через кольца коллектора.
На корпусе стенда закреплены также следующие элементы системы управления стендом:
- управляющий процессор 30, содержащий том числе порты ввода - вывода;
- приемник инфракрасного или радиочастотного сигналов 38, выход которого соединен со вторым портом ввода - вывода управляющего процессора 30;
- цифроаналоговый преобразователь (ЦАП) 25, который может быть как встроенным в управляющий процессор 30, так и быть по отношению к нему внешним устройством, причем вход ЦАП 25 (в случае внешнего устройства) соединен с первым портом ввода - вывода управляющего процессора 30;
- УМ1 21, вход которого соединен с выходом ЦАП 25, а выход - с обмотками ДП-ДБ9,
- первый преобразователь сигнала ПС1 39, вход которого соединен с выходом углового энкодера 31, а выход соединен с четвертым портом ввода-вывода управляющего процессора.
Связь контролируемого прибора с управляющим компьютером обеспечивается по одному из следующих вариантов:
1) вход второго преобразователя сигнала ПС2 40 связан через кольцевой коллектор с выходом контролируемого прибора 4, а выход ПС2 - с первым портом ввода-вывода управляющего компьютера 41.
2) выход контролируемого прибора связан с входом ПС2, установленного на платформе и содержащего передатчик с возможностью дистанционной передачи сигналов на управляющий компьютер 41.
Второй порт ввода - вывода управляющего компьютера 41 соединен через стандартный интерфейс с третьим портом ввода - вывода управляющего процессора 30.
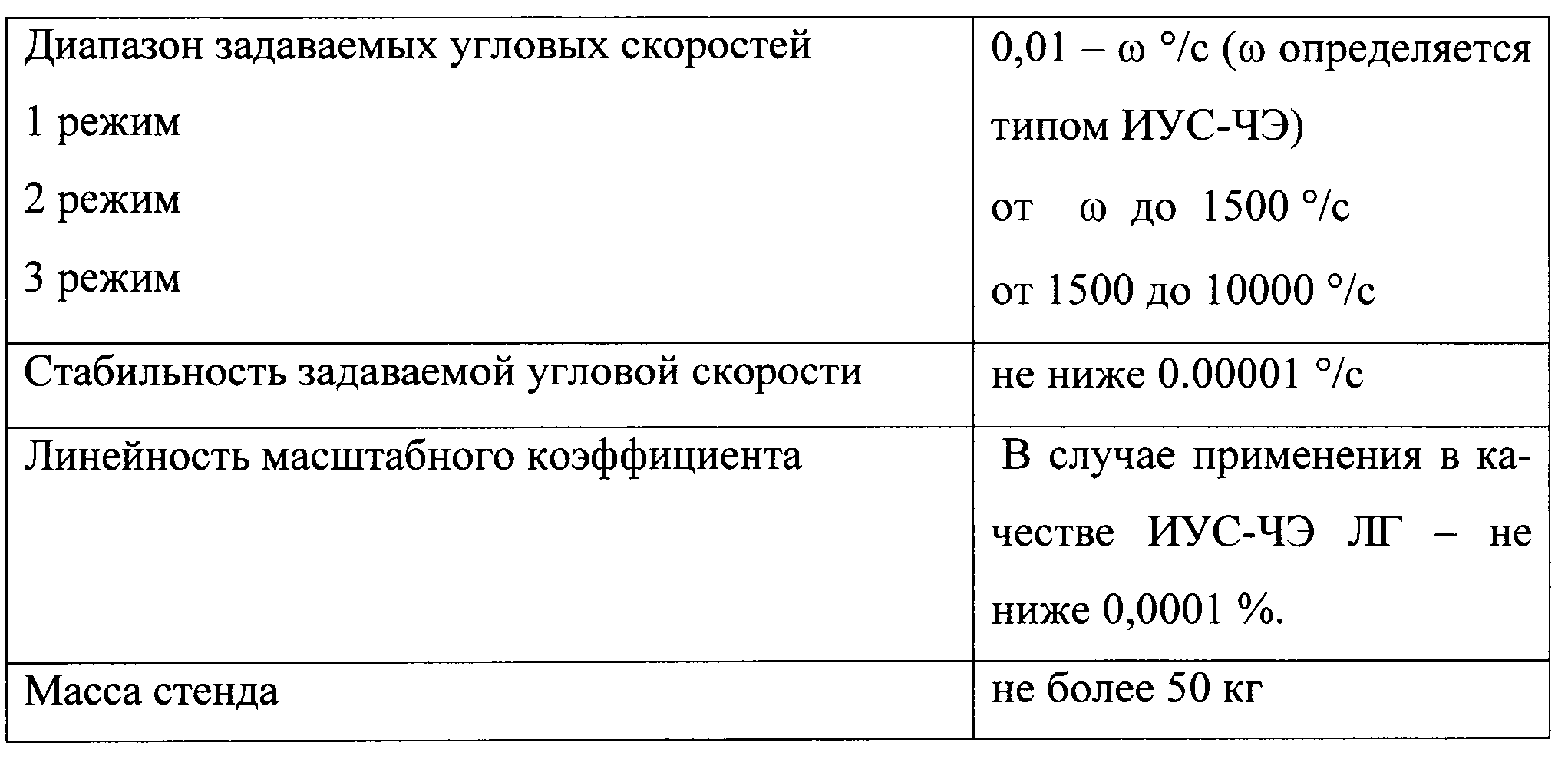
Конструкция обеспечивает расширение диапазона задаваемых угловых скоростей за счет трех режимов работы стенда:
1 режим: от 0.01 до ω °/с, когда в качестве чувствительных элементов работают измеритель угловой скорости, три акселерометра, измеряющих тангенциальное ускорение точек их крепления к платформе стенда, и угловой энкодер, причем верхний диапазон измерения о определяется типом измерителя угловой скорости 7;
2 режим: от со до 1200 °/с, когда в качестве чувствительных элементов работают тройки акселерометров 5 и 6, измеряющих тангенциальное и центростремительное ускорения точек их крепления к платформе стенда, и угловой энкодер;
3 режим: от 1200 °/с до 10000 °/с, когда в качестве чувствительных элементов работают тройка акселерометров 5, измеряющая тангенциальное ускорение точек крепления акселерометров к платформе стенда и угловой энкодер.
Трехдиапазонный режим работы позволяет с высокой точностью контролировать практически все типы измерителей угловых скоростей: прецизионные (в первом режиме), средней точности (в первом и во втором режимах работы) и грубые, к которым относятся, например, микромеханические, роторные, стержневые гироскопы, работающие на больших диапазонах угловых скоростей (во втором и третьем режимах).
Стенд работает следующим образом: Управление режимами работы задает оператор от управляющего компьютера 41. Сигнал о смене режимов поступает с управляющего компьютера 41 в третий порт ввода - вывода управляющего процессора 30 через второй порт ввода - вывода ПВВ2 управляющего компьютера 41.
В управляющем процессоре 30 реализован алгоритм переключения диапазонов работы стенда. В зависимости от задаваемой оператором команды управляющий компьютер 30 подает команду на выбор режима задания угловых скоростей - низкоскоростного, среднескоростного либо высокоскоростного. Если выбран низкоскоростной режим, то подаются команды на включение питания измерителя угловой скорости 7 и тангенциальных акселерометров 5. Угловой энкодер 31 и тангенциальные акселерометры 5 работают во всех трех режимах.
С управляющего компьютера 41 со второго порта ввода - вывода (ПВВ2) в третий порт ввода - вывода ПВВЗ управляющего процессора 30 поступает код, соответствующий задаваемому управляющему напряжению Uзад. Из третьего порта ввода - вывода ПВВЗ управляющего процессора 30 код передается в процессор, а оттуда через первый порт ввода - вывода ПВВ1 управляющего процессора 30 - на вход ЦАП 25, реализованное на фиг.1 как внешнее по отношению к управляющему процессору 30 устройство. С выхода ЦАП 25 соответствующее этому коду напряжение через УМ1 21 поступает на двигатель ДП-ДБ 9, который задает валу 1 стенда вращение с угловой скоростью, пропорциональной подаваемому управляющему напряжению Uзад. Работа ДБ полностью идентична работе двигателя, описанной в прототипе [13].
Вал 1 стенда начинает вращение, и с инерциальных чувствительных элементов - измерителя угловой скорости 7 и измерителей кажущегося линейного ускорения 5 и 6 информационные сигналы поступают на шину БПИ 36, а с нее - в блок БПИ 35. В первом режиме работы стенда, когда инерциальными чувствительными элементами являются ИУС 7 и тангенциальные акселерометры 5, это сигналы, пропорциональные угловой скорости вращения вала и тангенциальному ускорению точек крепления акселерометров 5 к платформе 8 стенда. В предлагаемом стенде, в отличие от прототипа, все инерциальные чувствительные элементы обладают собственными обратными связями и являются автономными. В процессоре 30 реализуются регуляторы контура управления двигателем.
В случае если выходной сигнал ИУС 7 и акселерометров 5 и 6 имеет аналоговую форму, то он поступает на вход АЦП 34 БПИ 35, а если цифровую, то - на вход ПЛИС 33 БПИ 35. В данном случае возможны любые комбинации форм сигнала акселерометров 5 и 6 и ИУС 7 (например, выход ИУС - аналоговый, а у акселерометров 5 и 6 - дискретный или наоборот). С выхода АЦП 34 сигнал поступает на второй вход МК2 37, а с выхода ПЛИС 33 - на первый вход МК2 37.
МК2 37 формирует кодовую комбинацию, поступающую в передатчик, который формирует инфракрасный либо радиочастотный сигнал. Данный сигнал поступает на приемник 38, с выхода которого он поступает во второй порт ввода - вывода ПВВ2 управляющего процессора 30. В управляющем процессоре сравниваются кодовые комбинации сигналов с акселерометров 5 и 6 и ИУС 7 с заданным значением угловой скорости, поступившим по стандартному интерфейсу через третий порт ввода - вывода ПВВ3 управляющего процессора 30 от управляющего компьютера 41. С углового энкодера 31 через первый преобразователь сигнала (ПС1) 39, предназначенном для связи углового энкодера 31 с управляющим компьютером 41, последовательность импульсов, число которых пропорционально углу поворота платформы стенда, поступает в четвертый порт ввода-вывода ПВВ4 управляющего процессора 30. В управляющем процессоре 30 происходит вычисление угловой скорости стенда как отношения измеренного угла ко времени опроса, измеряемого таймером процессора. Данное значение также поступает на вход процессора, в котором сигнал суммируется и сравнивается со значениями кодовых комбинаций сигналов с измерителя угловой скорости 7, сигналов с акселерометров 5 и 6, приведенных к значениям угловой скорости, и входного задающего сигнала. Процессор 30 осуществляет синхронизацию данных сигналов по времени, обеспечивает реализацию цифрового регулирования системы управления двигателем стенда, обеспечивая, тем самым, требуемые динамические характеристики системы. При этом преобразованный процессором управляющий сигнал поступает на ЦАП 25, откуда в виде аналогового сигнала - на усилитель мощности УМ1 21, а оттуда - на ДП-ДБ 9. Таким образом, реализуется цифровая система управления через управляющий процессор 30, которая также выполнена с возможностью адаптации системы управления двигателем к изменению типа устанавливаемого инерциального чувствительного элемента ИУС или измерителя линейных ускорений и момента инерции подвижной части стенда, работающая по разностному принципу: при разностном управляющем сигнале, стремящемся к нулю, вал 1 стенда вращается с заданной угловой скоростью. При подаче с управляющего компьютера 41 гармонического или любого другого сигнала система работает аналогичным образом.
Полученная информация через третий порт ввода - вывода ПВВЗ управляющего процессора 30 через стандартный интерфейс поступает во второй порт ввода-вывода ПВВ2 управляющего компьютера 41. От испытуемого прибора 4 в первый порт ввода - вывода ПВВ1 управляющего компьютера 41, поступает информация об угловой скорости, измеренной испытуемым прибором 4. (по первому варианту стенда - через коллектор 15 и преобразователь сигнала ПС2 40 (например, аналог-код, унитарный код, 16-разрядный параллельный код и т.п., соответствующий типу испытуемого прибора), по второму варианту стенда - через ПС2 дистанционно). В управляющем компьютере 41 происходит комплексная обработка полученных данных об угле и угловой скорости, заданной стенду, и выходной информации с испытуемого прибора 4, что позволяет формировать выходную информацию о масштабном коэффициенте и динамических характеристиках испытуемого прибора (в случае подачи на вход системы управления стендом гармонического сигнала). Таким образом, осуществляется контроль измерителя угловой скорости. В случае использования информации с ИУС и углового энкодера может осуществляться «самоконтроль» измерителя угловой скорости - чувствительного элемента стенда.
Во втором режиме работы, когда инерциальными чувствительными элементами являются три тангенциальных 5 и три центростремительных акселерометра 6, а также угловой энкодер 31, система работает аналогичным образом. Разница заключается в том, что ИУС 7 не участвует в процессе управления движением платформы стенда, а вместо него в работу включается тройка центростремительных акселерометров 6. В этом случае, если акселерометры обладают аналоговой обратной связью и аналоговым выходом, сигналы с их выходов через шину БПИ 36 поступают на АЦП 34 БПИ 35, с выходов которого - на МК2 37 и по инфракрасному или радиочастотному каналу - на ПВВ2 управляющего процессора 30. Если же центростремительные акселерометры 6 обладают дискретным выходом и аналоговой обратной связью или же цифровой обратной связью с дискретным выходом, то их выходные сигналы через шину БПИ 36 поступают на ПЛИС 33 БПИ 35, с выходов которой - на МК2 37 и по инфракрасному или радиочастотному каналу - на ПВВ2 управляющего процессора 30. Система работает (аналогичным первому режиму образом) по разностному принципу.
В третьем режиме работы управляющий сигнал, поступающий в порт ввода вывода ПВВ3 управляющего процессора 30 из порта ввода - вывода ПВВ2 управляющего компьютера 41 и пропорциональный задаваемой угловой скорости стенда, сравнивается в сумматоре управляющего процессора 30, с вычисленным сигналом, равным углу разворота, измеряемому угловым энкодером 31, деленному на время, измеряемое таймером управляющего процессора 30. Таким образом, в сумматоре управляющего процессора 30 сравниваются сигналы, пропорциональные измеренной и задаваемой угловым скоростям стенда.
В случае необходимости контроля акселерометров различного класса и принципа действия в системе управления стендом используются два акселерометра 6, измеряющих центростремительное ускорение точек их крепления к платформе стенда, а на место третьего устанавливается испытуемый акселерометр. Цифровая система управления во втором режиме работы настраивается путем подбора коэффициентов цифрового регулятора на режим работы с двумя акселерометрами 6. В первом и третьем режимах работы акселерометры 6 не используются. Это дает возможность при задании угловых скоростей во всем диапазоне измерений формировать центростремительные ускорения от десятых долей g до 500 g, т.е. создается возможность использования стенда в качестве малогабаритной центрифуги для контроля акселерометров инерциального класса и средней точности.
Механизм отслеживания 16, введен для снижения влияния на стабильность задаваемой стендом угловой скорости трения шарикоподшипниковых опор и трения в коллекторе. Его работа осуществляется следующим образом. В стенде суммарный момент сопротивления по оси вращения платформы не превышает 2-3 г·см. Уменьшение момента сопротивления шарикоподшипниковых опор достигнуто за счет их разгрузки путем введения ленточного торсиона. Коллектор 15 смонтирован на своих опорах, момент сопротивления коллекторных щеток при перемещении относительно токоведущих колец коллектора и момент сопротивления опор преодолеваются шаговым двигателем механизма отслеживания и к валу не приложены. Пусть двигатель приложил к валу (при поступлении соответствующего управляющего сигнала) момент М. Вал поворачивается, вследствие чего торец «А» трубчатой части вала с жестко закрепленным на конце «А» нижним концом ленточного торсиона поворачивается; конец торсиона, жестко связанный со стержнем, пока неподвижен, т.е. торсион закручивается на угол (в опытном образце) не более чем ±4°. При развороте вала на угол ±4° градуса замыкается, соответственно, левый или правый геркон вследствие того, что магнит, закрепленный на верхней колодке токоподвода, вращающийся вместе с валом, оказывается над контактами соответствующего геркона, что вызывает замыкание контактов геркона. Сигнал с герконов поступает в БУМО. В зависимости от направления вращения стенда сигнал с герконов поступает на первый или второй входы МК1. МК1 определяет направление вращения и количество шагов шагового двигателя механизма отслеживания. Драйвер управления формирует коммутацию обмоток шагового двигателя и сигналы с драйвера управления поступают на входы УМ2, а оттуда - на обмотки управления шагового двигателя механизма отслеживания. Одновременно информация о знаке и угле поворота передается в управляющий процессор. Задающей осью является вал, а отслеживающей осью является ось вращения втулки. Таким образом, обеспечивается режим «слежения» за совпадением углового положения обеих осей: оси вала и оси вращения коллекторной втулки. Это позволяет обеспечивать подвод питания к элементам, закрепленным на валу, через упругий токоподвод, допускающий угол взаимного разворота колодок не более ±4°, т.е. исключить влияние момента сопротивления коллектора на ось вращения вала. В процессе «слежения» за осью вала ленточный торсион закручивается при начале движения оси и раскручивается в процессе разворота оси вращения коллектора. Разгрузка опор вала обеспечивается за счет натяжения торсиона, передающего вес платформы с испытуемым прибором через стержень на шарикоподшипники оси вращения коллектора. Возникающий при этом дополнительный момент сопротивления шарикоподшипников «парируется» тем же шаговым двигателем механизма отслеживания. В качестве двигателя в механизме отслеживания выбран шаговый двигатель с электронным управлением, т.к. такие двигатели имеют большой момент на валу, высокую точность и останавливаются в момент окончания управляющего импульса, причем имеют магнитную фиксацию этого положения. Для любого другого типа двигателя механизма отслеживания возникает проблема его останова. На частоте в 1000 Гц такие шаговые двигатели работают без значительных вибраций. Тем не менее, для полного исключения влияния на стенд вибраций шагового двигателя механизм отслеживания устанавливается на амортизирующую прокладку. С учетом управления режимами работы механизма отслеживания от МК1 возможна реализация и второго «синхронного» режима работы. В этом случае МК1 следит за скоростью срабатывания герконов и увеличивает скорость вращения вала шагового двигателя. Эта скорость может корректироваться по значению скорости, вычисленной в процессоре и переданной через порт ввода-вывода в МК1. В этом случае шаговый двигатель механизма отслеживания вращается синхронно с валом стенда, который вращается двигателем ДП-ДБ. В случае «запаздывания» или «опережения» по скоростям вращения обеих систем в работу вступают герконы, работа которых описана выше.
Таким образом, предлагаемый стенд инвариантен к смене инерциального чувствительного элемента. Его схемотехнические решения позволяют применять прецизионный измеритель угловой скорости и измерители кажущегося ускорения любого класса и принципа действия, а цифровая обратная связь контура управления двигателем стенда обеспечивает указанную инвариантность. Стенд обладает следующими основными техническими характеристиками:
Таким образом, заявлен универсальный широкодиапазонный стенд для контроля измерителей угловой скорости, содержащий корпус, вал, установленный в корпусе с возможностью вращения, закрепленную на валу основную платформу, на которой установлен контролируемый измеритель угловых скоростей, электродвигатель постоянного тока, первый усилитель мощности (УМ1), кольцевой коллектор; дополнительную платформу, закрепленную на валу, на которой установлены шесть акселерометров, первая тройка из которых обеспечивает измерение тангенциального, а вторая тройка - центростремительного ускорения, оси чувствительности которых расположены под углами 120° друг относительно друга для каждой тройки акселерометров, и измерительный датчик угловой скорости (ИУС), ось чувствительности которого совмещена с осью вращения вала; упругий торцевой токоподвод, содержащий верхнюю и нижнюю колодки, и золотые проводники подвода питания, прикрепленные к колодкам, два геркона, закрепленные на нижней колодке и образующие угол, при котором исключена возможность разрыва или замыкания проводников токоподвода, взаимодействующий с герконами магнит, закрепленный на верхней колодке между контактами герконов, цилиндрическую втулку, подвешенную в корпусе на шарикоподшипниковых опорах соосно с валом, проходящим внутри втулки, стержень, при этом, верхняя колодка токоподвода закреплена на валу, а нижняя колодка - на цилиндрической втулке, вал выполнен полым на одном участке своей длины; ленточный торсион, размещенный в полости вала и прикрепленный нижним концом к торцу полого участка вала, а верхним концом - к середине стержня, который расположен перпендикулярно оси вала, проходит через отверстия цилиндрического полого участка вала и прикреплен двумя концами к торцу цилиндрической втулки, жестко соединенной с втулкой коллектора, механизм отслеживания, содержащий импульсный шаговый двигатель и зубчатую передачу, при этом шаговый двигатель закреплен на корпусе через амортизатор, выходное звено зубчатой передачи закреплено на цилиндрической втулке соосно с ней; блок управления механизмом отслеживания, состоящий из первого микроконтроллера (МК1), драйвера управления и второго усилителя мощности (УМ2); управляющего процессора, причем выходы левого и правого герконов, соединены, соответственно, с первым и вторым входом МК1, причем четыре выхода МК1 соединены соответственно с четырьмя входами драйвера управления, четыре выхода которого соединены соответственно с четырьмя входами УМ2, четыре выхода которого, в свою очередь, соединены с четырьмя соответствующими обмотками шагового двигателя, порт ввода-вывода (ПВВ) МК1 соединен с ПВВ5 управляющего процессора; вход УМ1 соединен с выходом цифроаналогового преобразователя, соединенного своим входом с ПВВ1 управляющего процессора; управляющий компьютер, ПВВ2 которого связан с ПВВЗ управляющего процессора через стандартный интерфейс; угловой энкодер, содержащий диск и две считывающие оптические головки, которые через первый преобразователь сигнала соединены с ПВВ4 управляющего процессора, причем указанные головки расположены под углом 180° друг к другу, выход контролируемого измерителя угловых скоростей связан с входом второго преобразователя сигнала (через коллектор или дистанционно), выход которого связан с ПВВ 1 управляющего компьютера. Отличительная особенность стенда заключается в том, что в стенд введены закрепленные на дополнительной платформе блок преобразования напряжения питания (БПНП), блок преобразования информации (БПИ), содержащий аналоге - цифровой преобразователь (АЦП), программируемую логическую интегральную схему (ПЛИС), шину БПИ, и второй микроконтроллер (МК2) с интерфейсом, обеспечивающим дистанционную передачу информации в последовательном коде; приемник сигналов, закрепленный неподвижно на основании стенда, при этом вход БПНП через линии токоподвода и контакты коллектора соединен с выходом стационарного источника питания, а выходы БПНП соединены с соответствующими входами питания БПИ и МК2; входы шины БПИ соединены соответственно с выходами ИУС и каждого из шести акселерометров, с первого по седьмой выходы шины БПИ соединены соответственно, с первым по седьмой входами ПЛИС, а выходы с восьмого по четырнадцатый шины БПИ соединены, соответственно, с первым по седьмой входами АЦП; выходы с первого по седьмой ПЛИС соединены с первым по седьмой входами МК2, а выходы с первого по седьмой АЦП соединены, соответственно, с восьмым по четырнадцатый входами МК2; выход приемника сигнала соединен с ПВВ2 управляющего процессора.
Литература
1. Ахмеджанов А.А. Системы передачи угла повышенной точности. - М.-Л.: «Энергия», 1966.
2. Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1975. - 767 с.
3. Бессекерский В.А., Фабрикант Е.А. Динамический синтез систем гироскопической стабилизации. - Л.: Судостроение, 1968. - 351 с.
4. Высокоточные преобразователи угловых перемещений / Под ред. А.А.Ахметжанова - М.: Энергоатомиздат, 1986.
5. Гироскопические системы. Ч. III Элементы гироскопических приборов, под ред. Д.С. Пельпора. - М.: «Высшая школа», 1972.
6. Изерман Р. Цифровые системы управления: Пер. с англ. - М.: Мир, 1984. - 541 с.
7. Калихман Д.М. Прецизионные управляемые стенды для динамических испытаний гироскопических приборов / Под ред. акад. В.Г. Пешехонова - СПб. ГНЦРФ ЦНИИ «Электроприбор», 2008. - 304 с. ISBN 5-900780-82-5.
8. Калихман Д.М., Калихман Л.Я., Садомцев Ю.В., Полушкин А.В., Ермаков Р.В., Нахов С.Ф., Чеботаревский В.Ю. Применение микропроцессоров в схемотехнических решениях прецизионных кварцевых маятниковых акселерометров. //15 Санкт - Петербургская Международная конференция по интегрированным навигационным системам. - СПб.: Изд - во ЦНИИ «Электроприбор», 2008. С.173-176.
9. Калихман Д.М., Калихман Л.Я., Садомцев Ю.В., Полушкин А.В., Ермаков Р.В., Депутатова Е.А., Нахов С.Ф. Прецизионный широкодиапазонный стенд с инерциальными чувствительными элементами и цифровой системой управления. // 16 Санкт - Петербургская Международная конференция по интегрированным навигационным системам. - СПб.: Изд-во ЦНИИ «Электроприбор», 2009. С.48-53.
10. Куо Б. Теория и проектирование цифровых систем управления. - М.: Машиностроение, 1986. - 448 с.
11. Садомцев Ю.В. Конструирование систем управления с обратной связью по критериям точности и грубости. - Саратов: Изд.-во Сарат. Гос. Техн. Университета, 2003. - 206 с.
12. Патент RU 2142643 С1 6 G01P 21/00, приоритет от 10.07.1996. Широкодиапазонный стенд для контроля измерителей угловых скоростей / Калихман Д.М., и др./
13. Патент RU №2378618, приоритет от 18.02.2008, Широкодиапазонный стенд для контроля измерителей угловой скорости / Калихман Д.М., и др./
14. Фабрикант Е.А., Журавлев Л.Д. Динамика следящего привода гироскопических стабилизаторов. - М.: Машиностроение, 1984. - 248 с.
15. Хрущев В.В. Электрические машины систем автоматики. - Л.: «Энергоиздат», 1985. - с.4-11, с.324.
16. Юферов Ф.М. Электрические машины автоматических устройств. - М.: «Высшая школа», 1976 - с.302.
17. Патент №2044274, приоритет от 27.05.92. Стенд для контроля прецизионного гироскопического датчика угловой скорости / Калихман Д.М., и др./.
Способ калибровки чувствительных элементов бесплатформенной инерциальной навигационной системы в полете
Многоканальный преобразователь напряжений в шим-сигналы
Волоконно-оптический измеритель угловой скорости
Способ определения параметров модели погрешностей измерений акселерометров инерциальной навигационной системы по измерениям спутниковой навигации
Способ определения параметров модели погрешностей измерений акселерометров ведомой инерциальной навигационной системы по измерениям эталонной инерциальной навигационной системы
Стенд для измерения вибрационных реактивных моментов гиромотора
Устройство передачи электрической энергии в ракетно-космических комплексах (варианты)
Термоинвариантный измеритель линейного ускорения
Порошковый композиционный материал акп-1пк и способ его получения
Способ измерения динамических характеристик кварцевого маятникового акселерометра (варианты)
Способ калибровки чувствительных элементов бесплатформенной инерциальной навигационной системы в полете
Многоканальный преобразователь напряжений в шим-сигналы
Волоконно-оптический измеритель угловой скорости
Способ определения параметров модели погрешностей измерений акселерометров инерциальной навигационной системы по измерениям спутниковой навигации
Способ определения параметров модели погрешностей измерений акселерометров ведомой инерциальной навигационной системы по измерениям эталонной инерциальной навигационной системы
Стенд для измерения вибрационных реактивных моментов гиромотора
Устройство передачи электрической энергии в ракетно-космических комплексах (варианты)
Термоинвариантный измеритель линейного ускорения
Порошковый композиционный материал акп-1пк и способ его получения
Способ измерения динамических характеристик кварцевого маятникового акселерометра (варианты)

