Результат интеллектуальной деятельности: БЕСПЛАТФОРМЕННЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНЫХ И УГЛОВЫХ СКОРОСТЕЙ
Вид РИД
Изобретение
Изобретение относится к области измерительной техники и приборостроения, а именно к приборам для определения навигационных параметров управляемых подвижных объектов.
Известен аналог «Блок измерения угловой скорости БИУС-040» разработки ОАО НПП «Антарес», Россия [1, 2], который представляет собой четырехосную (с неортогональным расположением осей чувствительности) отказоустойчивую систему измерения проекций абсолютной угловой скорости и линейного ускорения объекта на оси приборной системы координат.
В качестве измерителей линейного ускорения используются чувствительные элементы на основе сухих маятниковых акселерометров, с подвесом на основе кварцевого стекла и датчиком угла емкостного типа.
Система работоспособна при возникновении одного отказа в любой из одноименных подсистем (измерения угловой скорости, линейного ускорения, сервисной электроники) и содержит дублированную сервисную электронику.
Наиболее близким техническим решением к заявленному является «Бесплатформенный измерительный блок КИНД34-059» разработки филиала ФГУП «ЦЭНКИ» «НИИ Прикладной Механики им. академика В.И. Кузнецова» Россия [3], выбранный за прототип.
В состав прототипа входят не имеющие внутреннего резервирования и не связанные между собой восемь измерительных каналов: четыре гироскопических канала (ГК), в которых применен датчик угловой скорости (ДУС) на основе волоконно-оптического гироскопа (ВОГ), и четыре акселерометрических канала (АК); два модуля обмена и управления (МОУ1 и МОУ2) с входящим в каждый из них специальным вычислителем; четыре опорных генератора; четыре вторичных источника питания. В качестве измерителей линейного ускорения используются чувствительные элементы акселерометров маятникового типа, с подвесом на основе кварцевого стекла и емкостным датчиком угла. Все восемь чувствительных элементов (ЧЭ) установлены на общем основании и образуют блок ЧЭ. В состав прибора введены: резервированная система термостатирования и система виброударной защиты (амортизации) блока ЧЭ.
Недостатками прототипа являются совмещение электроники каждой пары чувствительных элементов (ДУСа и акселерометра) и наличие общего источника вторичного питания, что существенно снижает надежность прибора в целом, а также применение системы термостатирования, что ведет к значительному повышению энергопотребления.
Существенным недостатком аналога и прототипа является применение в них элементной базы импортного производства.
Задачей предлагаемого технического решения является повышение надежности и снижение энергопотребления. Кроме того, устройство должно быть выполнено на современной отечественной элементной базе и материалах.
Заявленный технический результат достигается тем, что в бесплатформенный измеритель линейных и угловых скоростей (БИЛУС), содержащий: четыре вторичных источника питания (ВИП), соединенные выходами, соответственно, с входами питания четырех измерителей угловых скоростей (ИУС), четыре измерителя линейных ускорений (ИЛУ) и два электронных вычислителя (ЭВ), согласно изобретению введены два ВИП для ЭВ, при этом выход первого ВИП соединен с входом первого ЭВ, выход второго ВИП соединен с входом второго ЭВ, резервированный силовой коммутатор (СК), выходами соединенный с входами всех ВИП и входами всех ИЛУ, выходы всех ИУС и ИЛУ связаны с соответствующими входами первого и второго ЭВ посредством независимых линий связи.
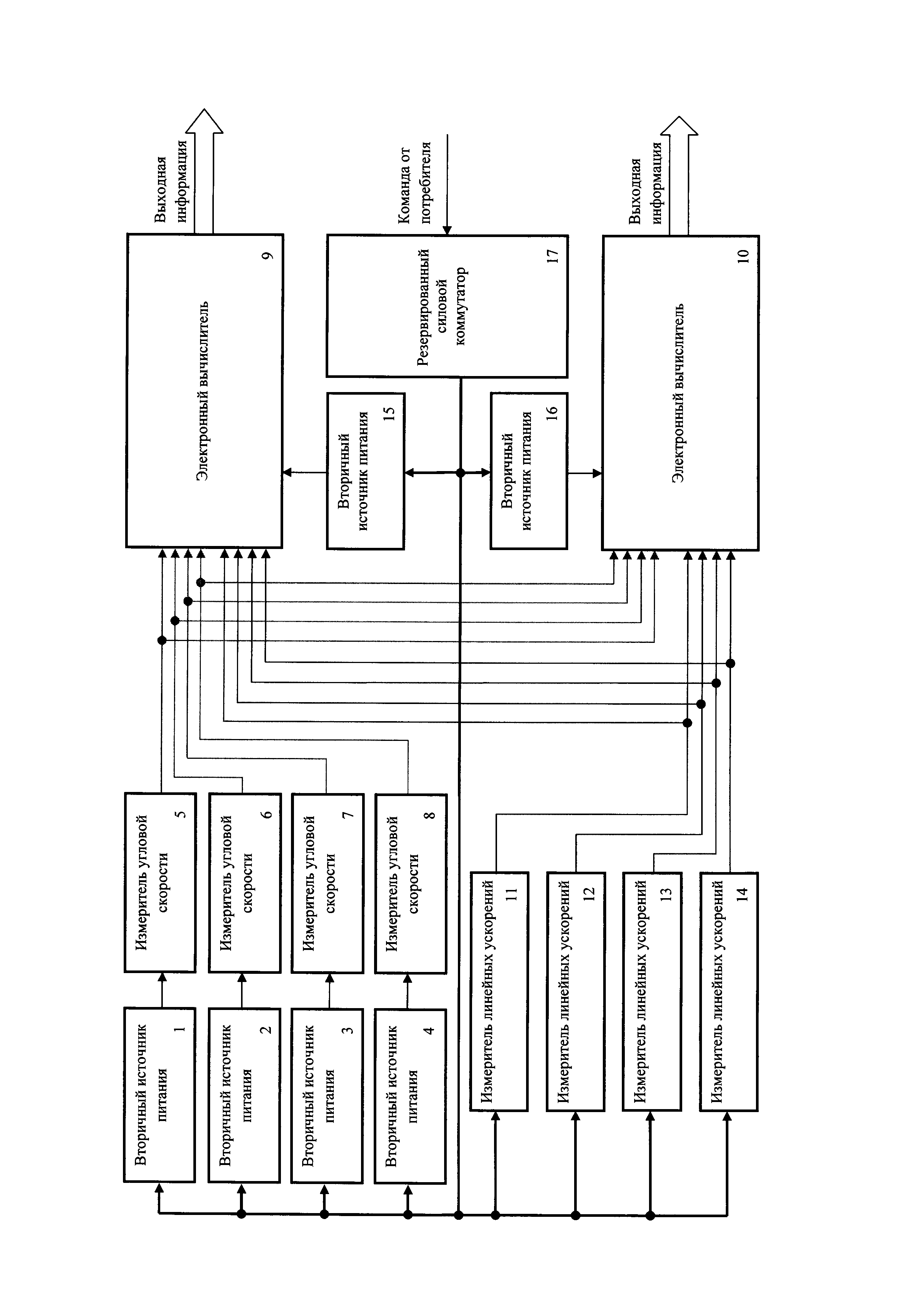
На чертеже приведена структурная схема бесплатформенного измерителя линейных и угловых скоростей.
БИЛУС предназначен для определения навигационных параметров управляемых подвижных объектов, содержит:
1, 2, 3, 4 - вторичные источники питания ИУС;
5, 6, 7, 8 - измерители угловых скоростей;
9, 10 - электронные вычислители;
11, 12, 13, 14 - измерители линейных ускорений;
15, 16 - вторичные источники питания ЭВ;
17 - резервированный силовой коммутатор.
Выходы четырех ИУС соединены с входами первого и второго ЭВ. Выходы четырех ИЛУ соединены, соответственно, с входами первого и второго ЭВ. Выходы резервированного СК соединены, соответственно, с входами ИЛУ и с входами всех ВИП. Выходы четырех ВИП соединены, соответственно, с входами четырех ИУС. Выходы первого и второго ВИП для ЭВ соединены с входом первого ЭВ и входом второго ЭВ соответственно.
Инициализация работы БИЛУС осуществляется подачей на него питания и выдачей в резервированный СК внешней команды от потребителя, которая задает требуемую конфигурацию ИУС и ИЛУ. Резервированный СК подает питание на соответствующие конфигурации ИЛУ и ИУС через ВИП. ИУС и ИЛУ измеряют, соответственно, угловые скорости, линейные ускорения и передают результаты измерений одновременно в первый и второй ЭВ.
В ЭВ осуществляется накапливание и обработка полученной информации. При поступлении в ЭВ команды опроса производится расчет следующей информации:
- о проекциях вектора абсолютной угловой скорости изделия на оси чувствительности ИУС и оси приборной системы координат;
- о приращениях интегралов проекций вектора абсолютной угловой скорости изделия на оси чувствительности ВОГ и оси приборной системы координат;
- о проекциях вектора линейного ускорения в месте установки на оси чувствительности акселерометров и оси приборной системы координат;
- о приращениях интегралов проекций вектора линейного ускорения в месте установки на оси чувствительности акселерометров и оси приборной системы координат;
- о составляющих кватерниона приращения углового положения с момента включения;
- о моментах времени, на которые сформирована информация.
При этом каждый измеритель осуществляет передачу значений величины собственной частоты параллельно в каждый ЭВ, которые обрабатывают полученную информацию и выдают конечный результат потребителю.
В БИЛУС используется ИЛУ, состоящий из ЧЭ акселерометра и его электронного преобразователя акселерометра.
Таким образом, заявлен бесплатформенный измеритель линейных и угловых скоростей, содержащий: четыре ВИП, соединенные выходами, соответственно, с входами питания четырех ИУС, четыре ИЛУ и два ЭВ. Отличительная особенность устройства заключается в том, что введены два ВИП для ЭВ, при этом выход первого ВИП соединен с входом первого ЭВ, выход второго ВИП соединен с входом второго ЭВ, резервированный СК, выходами соединенный с входами всех ВИП и входами всех ИЛУ, выходы всех ИУС и ИЛУ связаны с соответствующими входами первого и второго ЭВ посредством независимых линий связи.
Техническим результатом является повышение надежности и уменьшение энергопотребления.
Источники информации
1. www.npp-antares.ru/equipment.html.
2. Волоконно-оптический гироскоп космического применения. Опыт разработки, производства и эксплуатации // Доклады XX Санкт-Петербургской международной конференции по интегрированным навигационным системам, Санкт-Петербург, Россия, 27-29 мая, 2013.
3. В.М. Кутовой, О.И. Маслова, С.Ю. Перепелкина, М.А. Чапцова, М.В. Антонова, А.А. Игнатьев, Е.Ю. Ковалева, A.M. Курбатов, Л.З. Новиков. Исследование характеристик бесплатформенного инерциального блока на базе волоконно-оптических гироскопов в процессе наземной отработки. // Сборник материалов ХVIII Санкт-Петербургской международной конференции по интегрированным навигационным системам, СПб, ОАО «Концерн «ЦНИИ «Электроприбор», 2011.
Бесплатформенный измеритель линейных и угловых скоростей, содержащий: четыре вторичных источника питания (ВИП), соединенные выходами, соответственно, с входами питания четырех измерителей угловых скоростей (ИУС), четыре измерителя линейных ускорений (ИЛУ) и два электронных вычислителя (ЭВ), отличающийся тем, что введены два ВИП для ЭВ, при этом выход первого ВИП соединен с входом первого ЭВ, выход второго ВИП соединен с входом второго ЭВ, резервированный силовой коммутатор, выходами соединенный с входами всех ВИП и входами всех ИЛУ, выходы всех ИУС и ИЛУ связаны с соответствующими входами первого и второго ЭВ посредством независимых линий связи.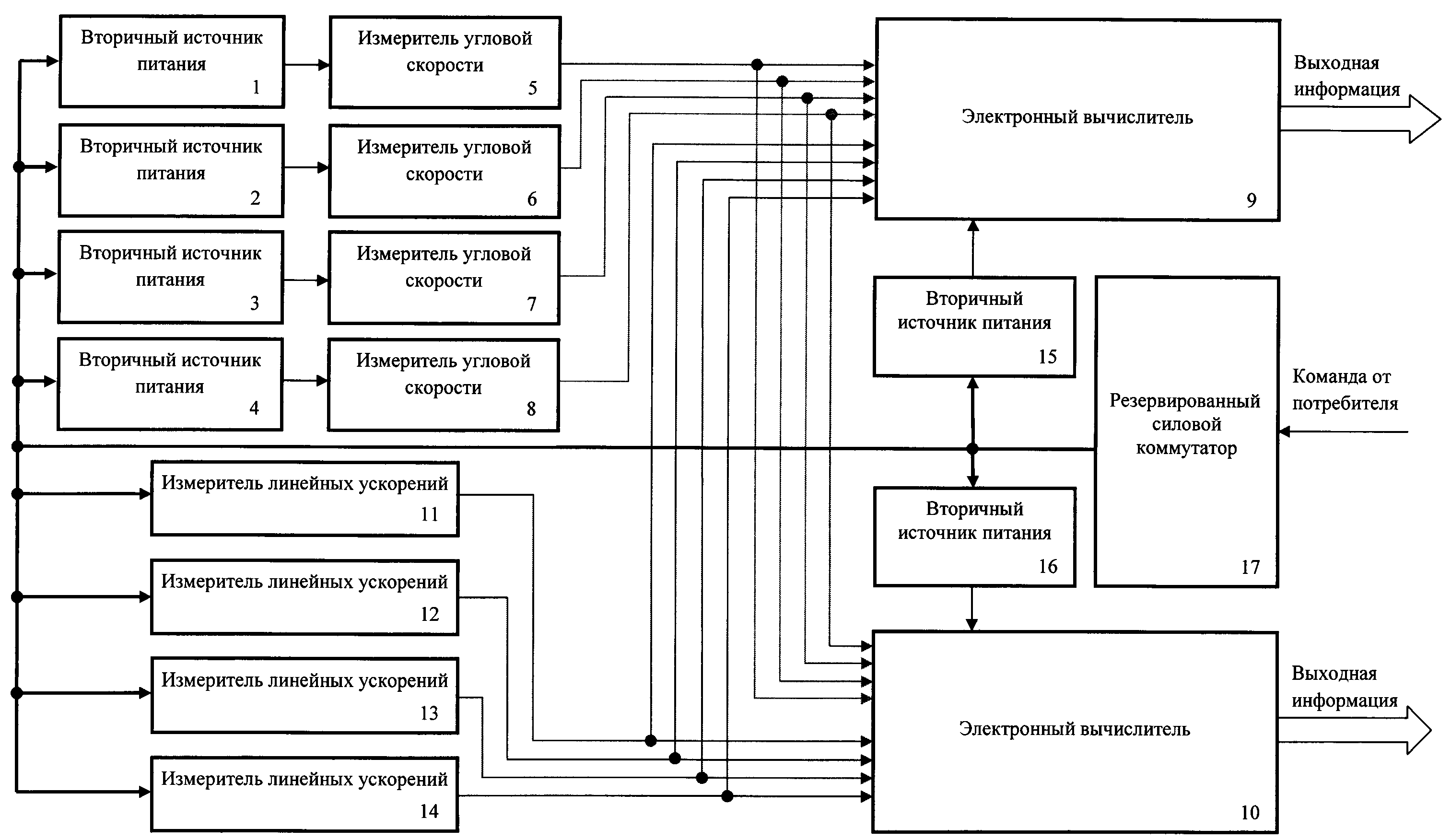
Многоканальный преобразователь напряжений в шим-сигналы
Волоконно-оптический измеритель угловой скорости
Способ определения параметров модели погрешностей измерений акселерометров инерциальной навигационной системы по измерениям спутниковой навигации
Способ определения параметров модели погрешностей измерений акселерометров ведомой инерциальной навигационной системы по измерениям эталонной инерциальной навигационной системы
Приемопередатчик последовательного интерфейса с элементом гальванической развязки
Стенд для измерения вибрационных реактивных моментов гиромотора
Термоинвариантный измеритель линейного ускорения
Формирователь временных интервалов
Порошковый композиционный материал акп-1пк и способ его получения
Способ измерения динамических характеристик кварцевого маятникового акселерометра (варианты)
Компактированное металлургическое изделие, способ производства компактированного металлургического изделия и применение компактированного металлургического изделия
Способ калибровки чувствительных элементов бесплатформенной инерциальной навигационной системы в полете
Многоканальный преобразователь напряжений в шим-сигналы
Универсальный широкодиапазонный стенд для контроля измерителей угловой скорости
Способ определения параметров модели погрешностей измерений акселерометров инерциальной навигационной системы по измерениям спутниковой навигации
Способ определения параметров модели погрешностей измерений акселерометров ведомой инерциальной навигационной системы по измерениям эталонной инерциальной навигационной системы
Стенд для измерения вибрационных реактивных моментов гиромотора
Устройство передачи электрической энергии в ракетно-космических комплексах (варианты)
Порошковый композиционный материал акп-1пк и способ его получения
Способ измерения динамических характеристик кварцевого маятникового акселерометра (варианты)

