Результат интеллектуальной деятельности: СПОСОБ АВТОНОМНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к области приборостроения, а именно к области автоматического регулирования, и может быть использовано в системах пространственной ориентации и навигации подвижных объектов.
Известен способ ориентации подвижного объекта, основанный на интегрированном использовании информации, получаемой от бортовой бесплатформенной инерциальной системы ориентации и навигации, а также дифференциальной спутниковой навигационной системы (Пешехонов В.Г. Интегрированные инерциально-спутниковые системы навигации // Сборник докладов и статей / под общей ред. акад. РАН В.Г. Пешехонова. Составитель д.т.н. О.А. Степанов. - СПб.: ГНЦ РФ - ЦНИИ Электроприбор, 2001. 235 с.).
Недостатком этого способа является низкая точность ориентации объекта в автономном режиме - при отсутствии дифференциальных поправок от спутниковой навигационной системы.
Известен также аналитический способ автономной ориентации подвижного объекта, основанный на формировании и обработке интегрированной многомерной информации, получаемой от пар и троек трехосных блоков гироскопов, акселерометров и магнитометров (Шведов А.П. Комплексирование магнитометрических и инерциальных систем ориентации / А.П. Шведов, Ю.В. Иванов, Д.М. Малютин, Р.В. Алалуев, М.Г. Погорелов // Справочник. Инженерный журнал. Приложение. №6. 2010. С. 15-19).
Способ имеет недостатки:
- низкая точность автономной ориентации объекта в районах географических / геомагнитных полюсов и околополярных районах (с географической широтой более 60°) из-за близости к условию вырождения алгоритмов обработки информации по причине квазиколлинеарности базовых векторов геофизических полей - поля тяжести и поля вращения Земли / поля тяжести и магнитного поля Земли;
- повышенная чувствительность алгоритмов обработки информации к погрешностям первичных измерений;
- низкая точность ориентации объекта из-за чувствительности алгоритмов обработки информации к дестабилизирующим факторам - внешним и внутренним помехам, технологическим и эксплуатационным помехам.
Наиболее близким к заявленному способу является аналитический способ автономной ориентации подвижного объекта, основанный на формировании расширенной комплексной магнито-тахо-акселерометричекой информации, получаемой с помощью трехблочного гибридного измерительного модуля, и последующей обработке полученной информации по алгоритмам аналитического горизонт-компасирования (МПК E21B 47/022, патент РФ №2503810, публ. 10.01.2014).
Способ ориентации включает измерение проекций напряженности магнитного поля феррозондами, измерение проекций ускорения свободного падения акселерометрами, измерение проекций угловой скорости Земли гироскопами на оси инклинометра, преобразование первичных сигналов и определение углов пространственной ориентации объекта. При этом оценивается погрешность гироскопических датчиков с привлечением информации от спутниковой навигационной системы и корректируется величина дрейфа гироскопических датчиков с учетом информации от феррозондов. Причем при отсутствии магнитных аномалий вычисляются углы ориентации по сигналам феррозондов и акселерометров, а при работе в средах с аномальными магнитными свойствами вычисляются параметры ориентации по сигналам гироскопов и акселерометров. Т.е. обработка многомерной магнито-тахо-акселерометричекой информации выполняется по схеме реконфигурации. При отсутствии магнитных аномалий и внешних помех реализуется автономная ориентация с помощью безгироскопного интегрированного магнито-акселеметрического измерительного модуля. При наличии магнитных аномалий и при появлении внешних магнитных помех реализуется автономная ориентация с помощью гибридного тахо-акселерометрического модуля.
Этот способ решает задачу автономной ориентации подвижного объекта, однако его недостатками являются:
- низкая точность ориентации объекта в районах географических / геомагнитных полюсов и околополярных районах (с географической широтой более 60°) из-за вырождения алгоритмов обработки информации по причине квазиколлинеарности базовых векторов геофизических полей - поля тяжести и поля вращения Земли / поля тяжести и магнитного поля Земли;
- низкая точность ориентации объекта из-за чувствительности алгоритмов обработки информации к дестабилизирующим факторам - внешним и внутренним помехам, технологическим и эксплуатационным помехам.
Технической проблемой заявляемого изобретения является недостаточная точность автономной ориентации подвижных объектов.
Поставленная проблема решается следующим образом.
В способе автономной ориентации подвижного объекта, основанном на измерениях проекций векторов напряженности результирующего магнитного поля трехосным блоком магнитометров, кажущегося ускорения объекта трехосным блоком акселерометров и абсолютной угловой скорости вращения объекта трехосным блоком гироскопов, дополнительно выполняют: предварительную метрологическую калибровку блоков магнитометров, акселерометров и гироскопов; идентификацию и учет параметров внутренних и внешних помех объекта; алгоритмическую обработку сигналов блоков магнитометров, акселерометров и гироскопов; коррекцию, учет относительных угловых скоростей вращения и редукцию показаний блоков магнитометров, акселерометров и гироскопов; формирование информации о совокупности базисов векторов геофизических полей и дополнительных векторов в неподвижном и связанном трехгранниках; вычисление оценок направляющих косинусов и углов ориентации объекта по алгоритмам аналитической пространственной ориентации объекта в условиях функциональной избыточности информации; вычисление оценок относительных угловых скоростей вращения объекта.
Совокупность отличительных признаков заявляемого изобретения обеспечивает выполнение поставленной технической задачи.
Из изученной научно-технической и патентной информации авторам не известен способ с указанными в формуле изобретения отличительными признаками, это дает основание сделать вывод о соответствии заявляемого способа критериям изобретения.
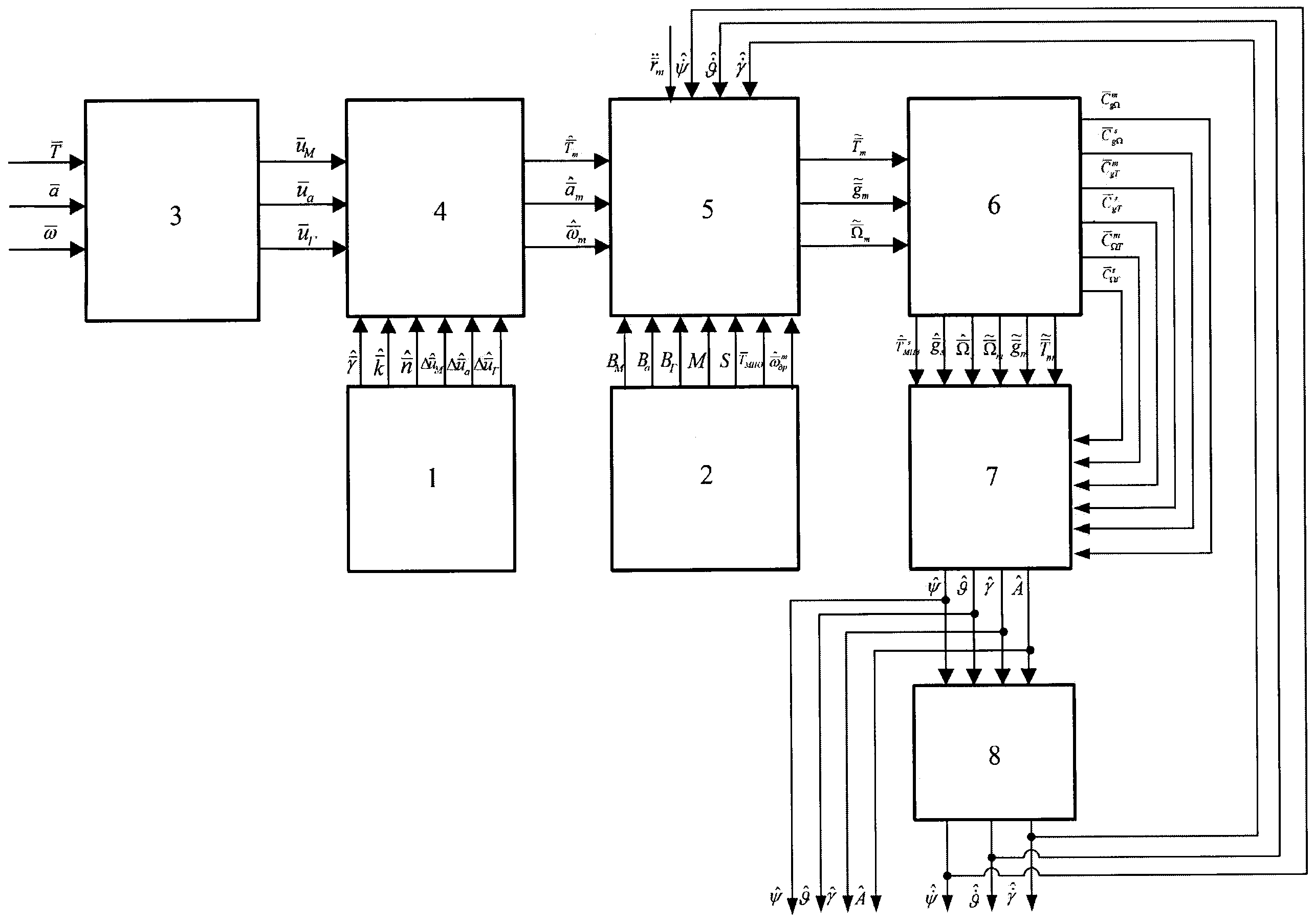
Заявленное изобретение поясняется фиг., отражающей последовательность подготовки, измерения и обработки многомерной информации. Позициями на чертежах обозначены: 1 - предварительная метрологическая калибровка блоков магнитометров, акселерометров и гироскопов; 2 - идентификация и учет параметров внутренних и внешних помех объекта; 3 - измерения проекций векторов напряженности результирующего магнитного поля трехосным блоком магнитометров, кажущегося ускорения объекта трехосным блоком акселерометров и абсолютной угловой скорости вращения объекта трехосным блоком гироскопов; 4 - алгоритмическая обработка сигналов блоков магнитометров, акселерометров и гироскопов; 5 - коррекция, учет относительных угловых скоростей вращения и редукция показаний блоков магнитометров, акселерометров и гироскопов; 6 - формирование информации о совокупности базисов векторов геофизических полей и дополнительных векторов в неподвижном и связанном трехгранниках; 7 - вычисление оценок направляющих косинусов и углов ориентации объекта по алгоритмам аналитической пространственной ориентации объекта в условиях функциональной избыточности информации; 8 - вычисление оценок относительных угловых скоростей вращения объекта.
При реализации способа автономной ориентации подвижных объектов в системах пространственной ориентации и навигации подвижных объектов выполняют (реализуют) следующие операции:
1. С целью проведения предварительной метрологической калибровки блоков магнитометров, акселерометров и гироскопов (позиция 1 фиг.) в режиме натурного эксперимента формируют:
- матрицы-столбцы оценок векторов масштабных коэффициентов измерительных каналов трехосных блоков магнитометров  , акселерометров
, акселерометров  и гироскопов
и гироскопов  :
:
 ;
;  ;
;  ,
,
где  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  - значения оценок векторов масштабных коэффициентов измерительных каналов трехосных блоков, соответственно, магнитометров, акселерометров и гироскопов в связанных координатных осях X, Y, Z;
- значения оценок векторов масштабных коэффициентов измерительных каналов трехосных блоков, соответственно, магнитометров, акселерометров и гироскопов в связанных координатных осях X, Y, Z;
- матрицы-столбцы оценок векторов систематических составляющих нулевых сигналов измерительных каналов трехосных блоков магнитометров  , акселерометров
, акселерометров  и гироскопов
и гироскопов  в связанных координатных осях X, Y, Z:
в связанных координатных осях X, Y, Z:
 ;
; ;
; ,
,
где  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  - значения оценок векторов систематических составляющих нулевых сигналов измерительных каналов трехосных блоков, соответственно, магнитометров, акселерометров и гироскопов в связанных координатных осях X, Y, Z.
- значения оценок векторов систематических составляющих нулевых сигналов измерительных каналов трехосных блоков, соответственно, магнитометров, акселерометров и гироскопов в связанных координатных осях X, Y, Z.
2. Для идентификации и учета параметров внутренних и внешних помех объекта (позиция 2 фиг.) формируют:
- матрицы геометрических погрешностей сборки трехосных блоков магнитометров Вм, акселерометров Ва и гироскопов Вг:
 ;
;
 ;
;
 ,
,
где  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  - значения величин геометрических погрешностей сборки трехосных блоков, соответственно, магнитометров, акселерометров и гироскопов в связанных координатных осях X, Y, Z;
- значения величин геометрических погрешностей сборки трехосных блоков, соответственно, магнитометров, акселерометров и гироскопов в связанных координатных осях X, Y, Z;
- матрицу геометрических погрешностей монтажа модуля с трехосными блоками магнитометров, акселерометров и гироскопов на объекте М
 ,
,
где α, β, σ - значения величин геометрических погрешностей монтажа модуля, содержащего трехосные блоки магнитометров, акселерометров и гироскопов, на объекте;
- матрицу коэффициентов Пуассона S и вектор напряженности магнитного поля объекта  постоянной намагниченности:
постоянной намагниченности:
 ,
,
где a, b, c, d, е,  , g, h, k - коэффициенты Пуассона;
, g, h, k - коэффициенты Пуассона;
 ,
,
где Р, Q, R - значения составляющих вектора напряженности магнитного поля объекта в связанных координатных осях X, Y, Z;
- матрицу-столбец оценок угловой скорости дрейфа блока гироскопов  в проекции на оси связанного трехгранника m=XYZ:
в проекции на оси связанного трехгранника m=XYZ:
 ,
,
где  ,
,  ,
,  - значения оценок составляющих вектора угловой скорости дрейфа блока гироскопов в проекции на оси связанного трехгранника m=XYZ.
- значения оценок составляющих вектора угловой скорости дрейфа блока гироскопов в проекции на оси связанного трехгранника m=XYZ.
3. Выполняют измерения проекций векторов напряженности результирующего магнитного поля  трехосным блоком магнитометров, кажущегося ускорения объекта
трехосным блоком магнитометров, кажущегося ускорения объекта  трехосным блоком акселерометров и абсолютной угловой скорости вращения объекта
трехосным блоком акселерометров и абсолютной угловой скорости вращения объекта  трехосным блоком гироскопов (позиция 3 фиг.). Результаты измерения представляют в виде уравнений:
трехосным блоком гироскопов (позиция 3 фиг.). Результаты измерения представляют в виде уравнений:
 ;
;
 ;
;
 ,
,
где  ,
,  ,
,  - векторы фактических значений выходных сигналов трехосных блоков, соответственно, магнитометров, акселерометров и гироскопов в связанных координатных осях X, Y, Z; γx, γy, γz, kx, ky, kz, nx, ny, nz - фактические значения величин масштабных коэффициентов измерительных каналов трехосных блоков, соответственно, магнитометров, акселерометров и гироскопов в связанных координатных осях X, Y, Z;
- векторы фактических значений выходных сигналов трехосных блоков, соответственно, магнитометров, акселерометров и гироскопов в связанных координатных осях X, Y, Z; γx, γy, γz, kx, ky, kz, nx, ny, nz - фактические значения величин масштабных коэффициентов измерительных каналов трехосных блоков, соответственно, магнитометров, акселерометров и гироскопов в связанных координатных осях X, Y, Z;  ,
,  ,
,  - векторы фактических значений систематических составляющих нулевых сигналов измерительных каналов трехосных блоков, соответственно, магнитометров, акселерометров и гироскопов в связанных координатных осях X, Y, Z.
- векторы фактических значений систематических составляющих нулевых сигналов измерительных каналов трехосных блоков, соответственно, магнитометров, акселерометров и гироскопов в связанных координатных осях X, Y, Z.
4. С учетом результатов полученных при выполнении позиций 1 и 3 фиг. осуществляют алгоритмическую обработку сигналов блоков магнитометров, акселерометров и гироскопов (позиция 4 фиг.) по формулам:
 ;
;
 ;
;
 ,
,
где  ,
,  ,
,  - оценки векторов, соответственно, напряженности результирующего магнитного поля, кажущегося ускорения объекта и абсолютной угловой скорости вращения объекта, отнесенных к связанному трехграннику m=XYZ.
- оценки векторов, соответственно, напряженности результирующего магнитного поля, кажущегося ускорения объекта и абсолютной угловой скорости вращения объекта, отнесенных к связанному трехграннику m=XYZ.
5. С учетом результатов предварительно проведенной идентификации параметров внутренних и внешних помех объекта - позиция 2 фиг. (Вм, Ва Вг, М, S,  ,
,  ), с использованием данных бортовой навигационной системы о векторе абсолютного ускорения движения объекта в связанных координатных осях X, Y,
), с использованием данных бортовой навигационной системы о векторе абсолютного ускорения движения объекта в связанных координатных осях X, Y, и результатов вычислений оценок составляющих вектора относительной угловой скорости вращения объекта на предыдущем шаге вычислений - позиция 8 фиг. (
и результатов вычислений оценок составляющих вектора относительной угловой скорости вращения объекта на предыдущем шаге вычислений - позиция 8 фиг. ( ,
,  ,
,  ) выполняют коррекцию показаний блоков магнитометров, акселерометров и гироскопов - позиция 4 фиг., а также их приведение (редукцию) к эквивалентному ортонормированному немагнитному основанию (позиция 5 фиг.) по формулам:
) выполняют коррекцию показаний блоков магнитометров, акселерометров и гироскопов - позиция 4 фиг., а также их приведение (редукцию) к эквивалентному ортонормированному немагнитному основанию (позиция 5 фиг.) по формулам:
 ;
;
 ;
;
 ,
,
где Е - единичная матрица;  ,
,  ,
,  - приведенные значения составляющих вектора результирующего магнитного поля в связанных координатных осях X, Y, Z;
- приведенные значения составляющих вектора результирующего магнитного поля в связанных координатных осях X, Y, Z;  ,
,  ,
,  - приведенные значения составляющих вектора ускорения свободного падения тела в связанных координатных осях X, Y, Z;
- приведенные значения составляющих вектора ускорения свободного падения тела в связанных координатных осях X, Y, Z;  ,
,  ,
,  - приведенные значения вектора угловой скорости вращения Земли в связанных координатных осях X, Y, Z;
- приведенные значения вектора угловой скорости вращения Земли в связанных координатных осях X, Y, Z;  - оценка матрицы ориентации объекта, полученная на предыдущем шаге вычислений;
- оценка матрицы ориентации объекта, полученная на предыдущем шаге вычислений;  ,
,  ,
,  - оценки составляющих вектора относительной угловой скорости вращения объекта, полученные на предыдущем шаге вычислений;
- оценки составляющих вектора относительной угловой скорости вращения объекта, полученные на предыдущем шаге вычислений;  - вектор магнитного поля Земли, приведенный к связанным координатным осям X, Y, Z;
- вектор магнитного поля Земли, приведенный к связанным координатным осям X, Y, Z;  - вектор ускорения свободного падения тела, приведенный к связанным координатным осям X, Y, Z;
- вектор ускорения свободного падения тела, приведенный к связанным координатным осям X, Y, Z;  - вектор угловой скорости вращения Земли, приведенный к связанным координатным осям X, Y, Z.
- вектор угловой скорости вращения Земли, приведенный к связанным координатным осям X, Y, Z.
6. По известным координатам местоположения объекта с использованием формул стандартных моделей геофизических полей (JGRF, WMM-2015, ЕММ-2015, HDGM-2015) и фигуры Земли в виде эллипсоида вращения (WGS-84, ПЗ-90) формируют избыточную информацию о совокупностях базисов векторов геофизических полей и дополнительных векторов  ,
,  ,
,  ,
,  ,
,  ,
,  в связанном m=XYZ и неподвижном (географическом) s=NHE трехгранниках (позиция 6 фиг.):
в связанном m=XYZ и неподвижном (географическом) s=NHE трехгранниках (позиция 6 фиг.):
 ;
;  ;
;  ;
;
 ;
;  ;
;  ,
,
 ;
;  ;
;  ;
;
 ;
;  ;
;  ,
,
где  ,
,  ,
,  - оценки компонентов вектора напряженности магнитного поля Земли в географическом трехграннике s;
- оценки компонентов вектора напряженности магнитного поля Земли в географическом трехграннике s;  ,
,  - оценки компонентов вектора напряженности поля тяжести Земли в географическом трехграннике s;
- оценки компонентов вектора напряженности поля тяжести Земли в географическом трехграннике s;  ,
,  - оценки проекций вектора угловой скорости суточного вращения Земли на оси географического трехгранника s;
- оценки проекций вектора угловой скорости суточного вращения Земли на оси географического трехгранника s;  ,
,  ,
,  - оценки векторов напряженности магнитного поля, поля тяжести и угловой скорости суточного вращения Земли, приведенные к географическому трехграннику s, соответственно;
- оценки векторов напряженности магнитного поля, поля тяжести и угловой скорости суточного вращения Земли, приведенные к географическому трехграннику s, соответственно;  ,
,  ,
,  ,
,  ,
,  ,
,  - дополнительные векторы, равные произведениям векторов геофизических полей, отнесенные к осям связанного m=XYZ и географического s=NHE трехгранников.
- дополнительные векторы, равные произведениям векторов геофизических полей, отнесенные к осям связанного m=XYZ и географического s=NHE трехгранников.
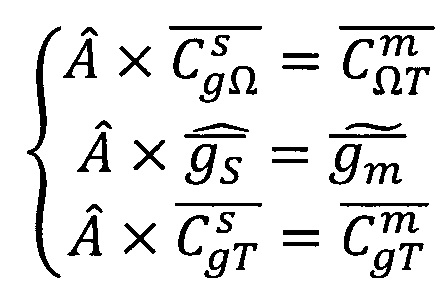
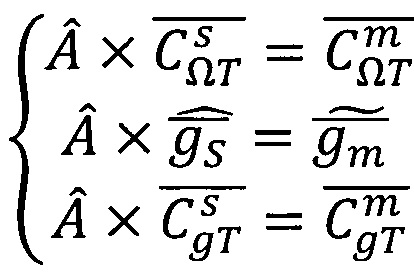
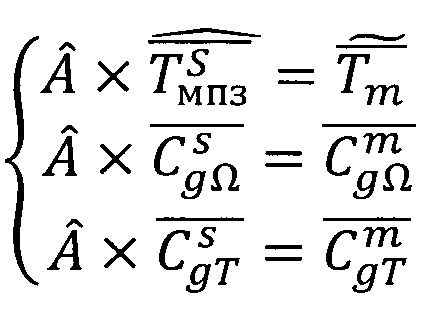
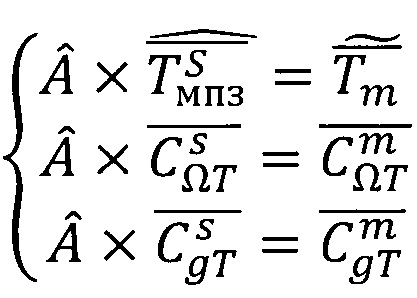
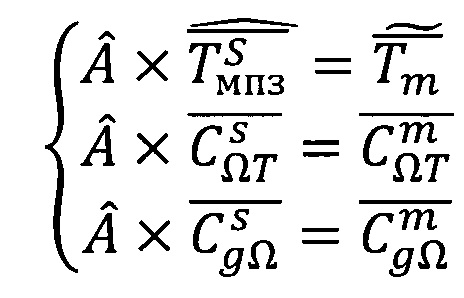
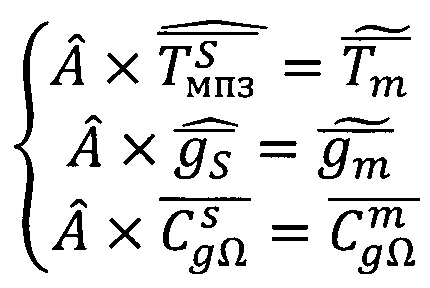
7. По параметрам сформированных совокупностей базисов векторов геофизических полей в связанном и неподвижном (географическом) трехгранниках (позиция 6 фиг.), которые определяют функциональную избыточность информации, по алгоритмам аналитической пространственной ориентации объекта выполняют вычисление оценок направляющих косинусов и углов ориентации подвижного объекта путем решения систем трех уравнений (позиция 7 фиг.):
 ;
;  ;
; 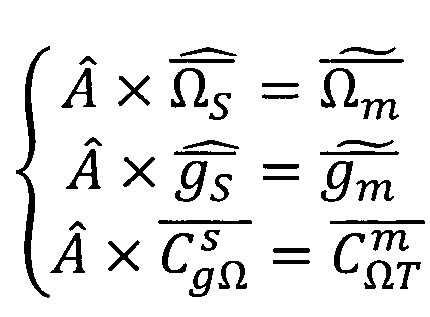 ;
; 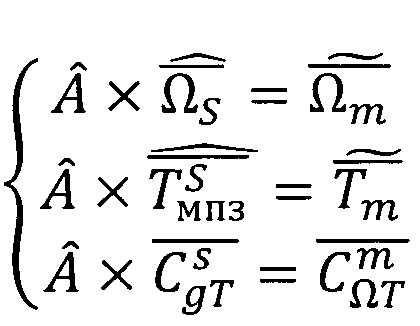 ;
;
 ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;  .
.
Результатом решения систем уравнений являются значения оценок направляющих косинусов матрицы ориентации  и оценок углов ориентации объекта
и оценок углов ориентации объекта  - угла курса,
- угла курса,  - угла тангажа,
- угла тангажа,  - угла крена.
- угла крена.
8. Вычисляют оценки относительных угловых скоростей вращения объекта (позиция 8 фиг.) на i-м шаге вычислений по алгоритмам численного дифференцирования
 ,
,
где  ,
,  ,
,  ,
,  ,
,  ,
,  - значения оценок углов курса, тангажа и крена подвижного объекта на i-ом и (i-1)-ом шагах вычислений; Δti - интервал времени на i-ом шаге вычислений.
- значения оценок углов курса, тангажа и крена подвижного объекта на i-ом и (i-1)-ом шагах вычислений; Δti - интервал времени на i-ом шаге вычислений.
Данный способ по сравнению с прототипом позволяет:
- повысить точность решения задачи автономной ориентации подвижных объектов в районах географических / геомагнитных полюсов и околополярных районах, за счет вычисления дополнительных векторов  ,
,  ,
,  ,
,  ,
,  ,
,  и их последующего использования в алгоритмах алгоритмической пространственной ориентации;
и их последующего использования в алгоритмах алгоритмической пространственной ориентации;
- повысить точность ориентации объекта за счет учета в алгоритмах обработки информации оценок дестабилизирующих факторов - внешних и внутренних помех, технологических и эксплуатационных помех, идентифицируемых в процессе предварительной метрологической калибровки блоков магнитометров, акселерометров и гироскопов.
Использование изобретения позволяет решать задачи автономной ориентации и навигации подвижных объектов в условиях отсутствия возможности применения спутниковых навигационных систем, что повышает безопасность и эффективность эксплуатации образцов авиационной, морской и наземной техники, в том числе в районах географических / геомагнитных полюсов и околополярных районах.
Способ автономной ориентации подвижного объекта, включающий измерения проекций векторов напряженности результирующего магнитного поля трехосным блоком магнитометров, кажущегося ускорения объекта трехосным блоком акселерометров и абсолютной угловой скорости вращения объекта трехосным блоком гироскопов, отличающийся тем, что выполняют: предварительную метрологическую калибровку блоков магнитометров, акселерометров и гироскопов; идентификацию и учет параметров внутренних и внешних помех объекта; алгоритмическую обработку сигналов блоков магнитометров, акселерометров и гироскопов; коррекцию, учет относительных угловых скоростей вращения и редукцию показаний блоков магнитометров, акселерометров и гироскопов; формирование информации о совокупности базисов векторов геофизических полей и дополнительных векторов в неподвижном и связанном трехгранниках; вычисление оценок направляющих косинусов и углов ориентации объекта по алгоритмам аналитической пространственной ориентации объекта в условиях функциональной избыточности информации; вычисление оценок относительных угловых скоростей вращения объекта.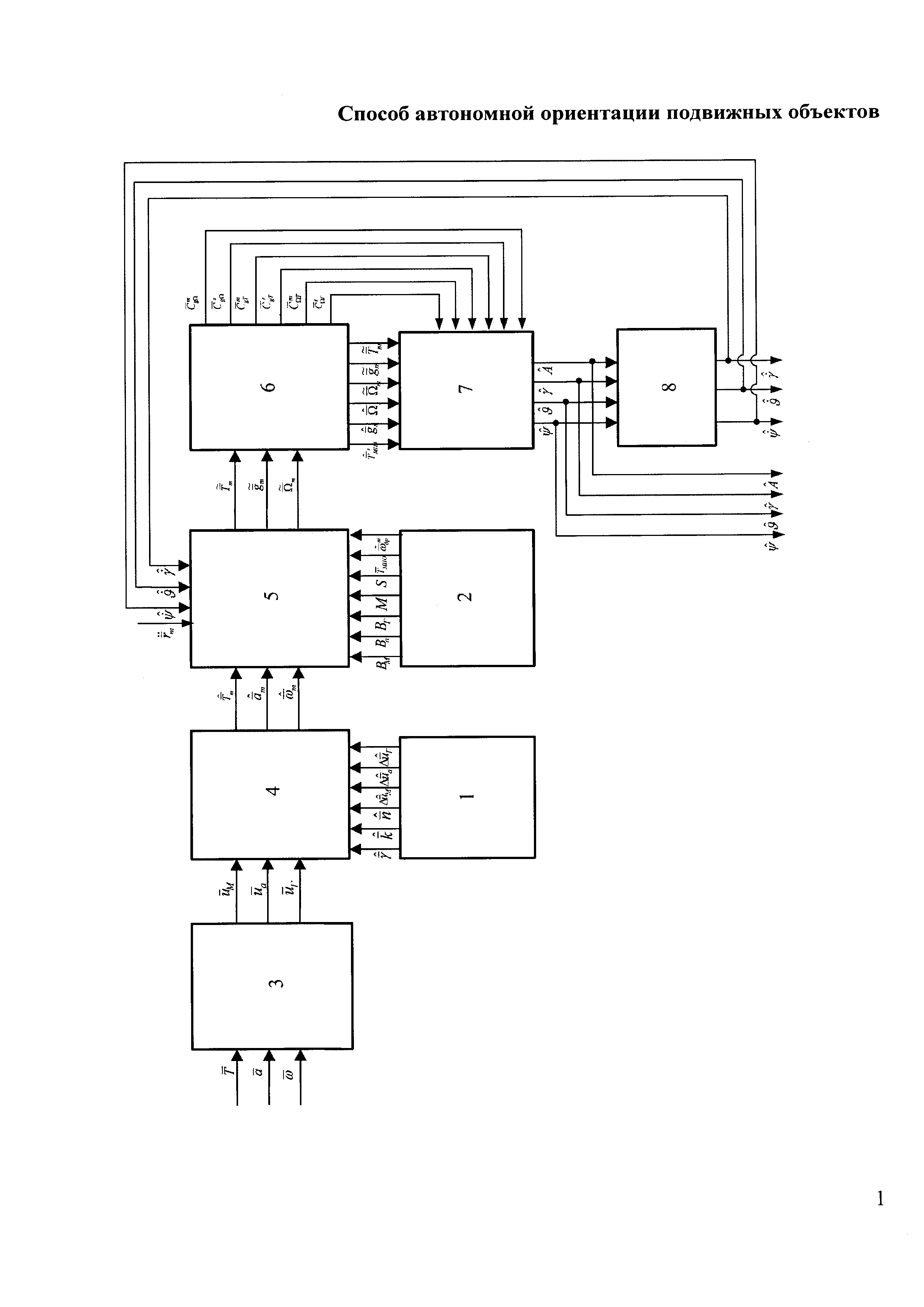
Жидкостекольная композиция
Устройство для образования винтового профиля на стенках скважин под буронабивные сваи (дополнительное)
Способ обработки поверхности фторсодержащей резины
Свч-печь
Способ стабилизации параметров шарикоподшипника
Способ правки длинномерных деталей
Способ формирования серебросодержащего биопокрытия титанового имплантата
Сорбционно-флуоресцентный способ определения содержания полициклических ароматических углеводородов в водных растворах и сорбент для реализации способа
Способ нанесения биокерамического покрытия на имплантаты
Способ стабилизации параметров подшипника
Способ персональной автономной навигации
Способ дистанционного бесконтактного зондирования, каротажа пород и позиционирования снаряда в буровой скважине
Командно-стрельбовая информационно-управляющая система
Дистанционный геолого-разведочный измерительно-вычислительный комплекс "тантал"
Командно-стрельбовая информационно-управляющая система (варианты)
Стенд для испытаний элементов беспилотного вертолета с соосными винтами
Способ получения карты мощности антропогенных карбонатных отложений археологического памятника типа "раковинная куча"
Способ управления движением летательного аппарата
Способ планирования траектории движения летательного аппарата
Стенд для испытаний элементов вертолета с соосными винтами

