Результат интеллектуальной деятельности: Способ определения параметров цели гидролокатором
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для автоматического обнаружения цели, определения ее параметров при использовании зондирующих сигналов большой длительности на фоне реверберационных помех.
Известны способы измерения дистанции, основанные на приеме эхосигнала гидролокатора, изложенные, например, в книге Евтютов Е.С. и Митько В.Б. "Примеры инженерных расчетов в гидроакустике", Судостроение, 1981 г., с. 77. Способ содержит спектральный анализ этого процесса, детектирование спектральных составляющих, интегрирование огибающей и обнаружение сигнала при сравнении с порогом. В момент превышения выбранного порога определяется время задержки эхосигнала и по нему высчитывается дистанция до цели.
Аналогичный способ обнаружения эхосигнала и измерения дистанции изложен в книге B.C. Бурдика "Анализ гидроакустических систем". Судостроение, 1988 г. стр. 347 и содержит многоканальную по частоте фильтрацию, детектирование, выделение огибающей и сравнение с порогом. По каналу с максимальной амплитудой сигнала по частоте определяется смещение спектра, которое пропорционально радиальной скорости цели, а по моменту превышения выбранного порога определяется задержка эхосигнала и дистанция до цели.
При использовании цифровой техники в качестве спектрального анализа применяют процедуры быстрого преобразования Фурье (БПФ), которые обеспечивают выделение и измерение энергетического спектра шумового электрического процесса ("Применение цифровой обработки сигналов", М.: Мир, 1990 г., стр. 296). Перечисленные способы имеют точность измерения, дистанции определяемую длительностью зондирующего сигнала.
Известен способ обнаружения эхосигнала и измерения дистанции, рассмотренный в книге Л. Рабинера, Б. Гоулда «Теория и применение цифровой обработки сигналов», М.: Мир, 1978 г.
Способ содержит следующие операции: излучение зондирующего сигнала длительностью Т на известной частоте; прием эхосигнала в смеси с шумовой помехой гидроакустической антенной; дискретизацию электрического сигнала на выходе гидроакустической антенны; набор приемным устройством дискретизированных отсчетов длительностью Т; определение энергетического спектра с помощью процедуры быстрого преобразования Фурье БПФ; многократное повторение процедуры набора дискретизированных отсчетов длительностью Т через равные промежутки времени, и определение энергетического спектра каждого набора; выбор набора с максимальной энергией сигнала; принятие решение об обнаружении по набору с максимальной энергией сигнала.
Недостатком способа является большой объем вычислительных операций для определения факта наличия эхосигнала, для чего требуется предварительное определение помехи и выбор порога, определение превышения порога на каждом интервале временного набора. После этого производится анализ амплитудных значений и определение наличия эхосигнала по результатам последовательной обработки временной реализации по всей шкале дистанции. Выбор порога, как правило, производится при определении среднего значения амплитуд всех спектральных отсчетов, в число которых входят не только отсчеты, связанные с перемещением цели, но и отсчеты, связанные с реверберацией. Это приводит к тому, что порог принятия решения завышается и снижается вероятность обнаружения дальних целей, в особенности тех, которые перемещаются с малой скоростью и находятся в реверберационных отсчетах спектра. При обычном пороговом обнаружении эхосигнала при обработке по реализациям одиночного спектра большую сложность представляет обнаружение эхосигнала на фоне реверберационной помехи, обусловленной отражением от дна или отражением от поверхности в дальних зонах освещенности. При предъявлении такой информации оператору производят нормирование к максимальной амплитуде эхосигнала в спектре. Поскольку такие эхосигналы принадлежат реверберации, то эхосигналы от реальных целей, которые имеют меньшую амплитуду, могут быть пропущены.
Задачей изобретения является обеспечение автоматического обнаружения эхосигнала от малозаметной цели на фоне реверберационной помехи и автоматическое измерение параметров обнаруженной цели.
Поставленная задача решается тем, что в способ, содержащий излучение зондирующего сигнала длительностью Т на известной частоте Fизлуч, прием эхосигнала в смеси с шумовой помехой гидроакустической антенной, дискретизацию электрического сигнала на выходе гидроакустической антенны, последовательный набор длительностью Т приемным устройством дискретизированных отсчетов, определение энергетического спектра с помощью процедуры быстрого преобразования Фурье (БПФ), определение энергетического спектра каждого набора, определение порога Апор, введены новые признаки, а именно производят последовательный анализ выделенных спектров, для чего запоминают спектры и времена их определения, определяют коэффициент корреляции КК между каждыми двумя последовательными спектрами, если коэффициент корреляции меньше 0,5, то спектр с более ранним временем реализации удаляют, снова определяют коэффициент корреляции образовавшейся пары спектров, и так до тех пор, пока коэффициент корреляции не превысит 0,5, после чего запоминают все последовательные N спектров, коэффициенты корреляции между которыми превысили 0,5 и времена их определения, суммируют амплитуды спектров и нормируют их к числу N, сравнивают амплитуды нормированных спектральных отсчетов с порогом Aпор, выбирают спектральный отсчет с максимальной амплитудой Aмакс определяют частоту этого спектрального отсчета Fизм и сравнивают с частотой излученного сигнала Fизлуч, если Fизм≠Fизлуч+ΔF, где ΔF – смещение спектра за счет собственного движения, то принимают решение, что это движущаяся цель, и по значению Fизм определяют радиальную скорость цели Vдоп, если Fизм=Fизлуч+ΔF,то определяют ширину спектра по числу отсчетов достигших уровня 0,5 Aмакс и при ширине спектра ≤1/Т принимают решение, что это обнаружена неподвижная цель с радиальной скоростью Vрад=0, а дистанцию определяют по спектру с амплитудой Aмакс и максимальным коэффициентом корреляции.
Технический результат состоит в автоматическом обнаружении эхосигнала на фоне реверберационной помехи различного происхождения и автоматического определения параметров цели, в том числе ее радиальной скорости, дистанции и ширины спектра от цели по одной посылке.
Поясним достижение заявленного технического результата.
В практике работы гидролокаторов имеют место обнаружение локальных целей на фоне нормальной помехи и на фоне распределенной помехи, характеристики которой трудно прогнозировать.
Под локальными целями понимается подводный или надводный объект искусственного происхождения ограниченного размера (корабль, подводный аппарат, буй, контейнер и т.д.), отражение от которых происходит по нормали относительно падающей волны, а сама отражающая поверхность имеет отражающие плоскости существенно больше длины волны. Однако в реальных условиях имеется помеха, обусловленная реверберацией, либо наличием отражения сигнала, излученного гидролокатором, от звукорассеивающих слоев естественного и искусственного происхождения, так называемая распределенная помеха. Распределенная помеха затрудняет обнаружение локального объекта или приводит к повышению вероятности ложной тревоги. Классификация помех по характеру их возникновения рассматривается в книге Л.В. Орлова, А.А. Шаброва Гидроакустическая аппаратура рыбопромыслового флота. Л.: Судостроение, 1987 г., стр. 51-59. Как правило, интервал стабильности распределенной помехи существенно меньше, чем интервал стабильности эхосигнала, который определяется временем отражения от нормально расположенной поверхности, т.е. длительностью зондирующего сигнала.
Реверберационная помеха формируется суммированием отражений от большого числа отражателей, которые имеют различную длительность и случайную фазу, что так же образует отражение с малым по длительности стабильным состоянием.
Сущность предлагаемого способа заключается в следующем. Эхосигнал от локальной цели формируется на основе отражения энергии падающего зондирующего сигнала на цель по нормали относительно направления прихода зондирующего сигнала гидролокатора. При этом, как правило, это цели искусственного происхождения и в зависимости от принадлежности могут иметь форму шара, эллипсоида, куба, цилиндра, конуса, плоскости или их различных сочетаний. Это приводит к тому, что при отражении формируется регулярный фронт волны, характеристика которой стабильна на некотором пространственном интервале. (Е.А. Штагер, Е.В. Чаевский. Рассеяние волн на телах сложной формы. М.: Сов.радио, 1974 г.) Поскольку локальная цель находится в дальнем поле и имеет ограниченные размеры, то эхосигнал от такой цели представляет плоскую, мало искаженную волну, определяемую длительностью отраженного эхосигнала, на протяжении которой характеристики стабильно сохраняются за время распространения сигнала.
Распределенная помеха не имеет ярко выраженных когерентных свойств. В случае реверберации (см. Ольшевский В.В. Статистические свойства морской реверберации. М.: Наука, 1966 г.) эхосигнал формируется как сумма эхосигналов от элементарных отражателей, имеющих различную длительность и различную амплитуду, что приводит к искажению фронта плоской волны. В этой ситуации последовательные временные реализации не связаны между собой и имеют малую степень связи на протяжении длительности зондирующего сигнала. Эхосигнал от такой совокупности случайно расположенных отражателей будет представлять собой случайную совокупность амплитуд, которые независимы друг от друга и поэтому последовательны временные реализации также будут не связаны. Единственным способом, который позволит отличить наличие когерентной локальной цели является корреляционная обработка временных реализаций, принимаемых последовательно по дальности длительностью Т. Фронт волны, отраженный от распределенного отражателя, определяется случайным формированием отраженного фронта волны отдельных отражателей, и при приеме на интервале большем, чем интервал корреляции помехи, не будет иметь корреляционной связи. Таким образом, для реализации предлагаемого метода обработки необходим прием эхосигнала последовательно длительностями, равными Т, и определения степени корреляционной связи между последовательными спектрами. Измерение взаимно-корреляционной функции и определение коэффициента корреляции между процессами это известные операции, которые характеризуют степень схожести двух спектров и достаточно подробно используются в современной технике (Дж. Бендат, А. Пирсол. «Измерение и анализ случайных процессов». М.: Мир, 1971, стр. 44-47, стр. 196). Наличие коэффициента корреляции больше 0,5 между двумя последовательными спектрами, разнесенными на время большее, чем интервал корреляции помехи, говорит о том, что спектры принадлежат детерминированному эхосигналу. Поскольку время появления эхосигнала неизвестно, то обработку проводят последовательно, набирая входные временные реализации длительностью равной длительности излученного зондирующего сигнала. Для дальнейшей обработки потребуется значения помехи на входе обнаружителя, для чего по первым временным реализациям, которые еще не содержат эхосигнал от цели, определяется среднее значение амплитуд спектральных составляющих, на основании которого определяется порог Апор. При наборе часть эхосигнала может оказаться в двух последовательных наборах и тогда спектры в этих наборах будут одни и те же, а коэффициент корреляции между ними будет больше 0,5. Часто при обработке используют набор временных реализаций не последовательно, а некоторым перекрытием, и тогда коэффициент корреляции больше 0,5 будет не между 2-мя последовательными спектрами, а между большим числом последовательных спектров N. Поскольку число отсчетов спектра одинаковое и расположены они в одинаковом порядке, то этим обстоятельством можно воспользоваться и просуммировать амплитуды спектральных отсчетов, что приведет к увеличению отношения сигнал/помеха. Поскольку измерение помехи и определение порога проводилось по одной реализации спектра, поэтому амплитуды всех спектральных составляющих суммарного спектра следует разделить на число спектров N. Использование корреляционной обработки последовательных спектров и получение суммарного спектра, обеспечивает увеличение отношение сигнал/помеха существенно больше, чем в одиночном спектре. Сравнение с порогом и определение амплитуды спектрального отсчета и его номера является известной операцией, которая реализована во всех современных гидролокаторах. По номеру спектрального отсчета определяется радиальная скорость цели и расположение относительно частоты излучения Fизл. Значение частоты сдвига спектральной дискреты Fизм относительно частоты зондирующего сигнала определяет радиальную скорость Vдоп обнаруженной цели (Дж. Хортон «Основы гидролокации» Судпромгиз 1961 г. стр. 405). Эти операции являются известными и определяют наличие доплеровскрой скорости Vдоп. и Vрев. реверберационной составляющей скорости. По максимальному значению амплитуды Амакс доплеровской составляющей определяется временное положение спектра и по нему определяется дистанция известным методом. Если обнаружена только реверберационная составляющая, то по ней определяется дистанция Д только в том случае, когда ширина спектра реверберационной составляющей равна ширине спектра зондирующего сигнала, определяемого его длительностью Т. Предложенная процедура позволяет по одной посылке определять реальную локальную цель и нереальный распределенный объект, измерить радиальную скорость объекта и дистанцию до него с малой вероятностью ложной тревоги.
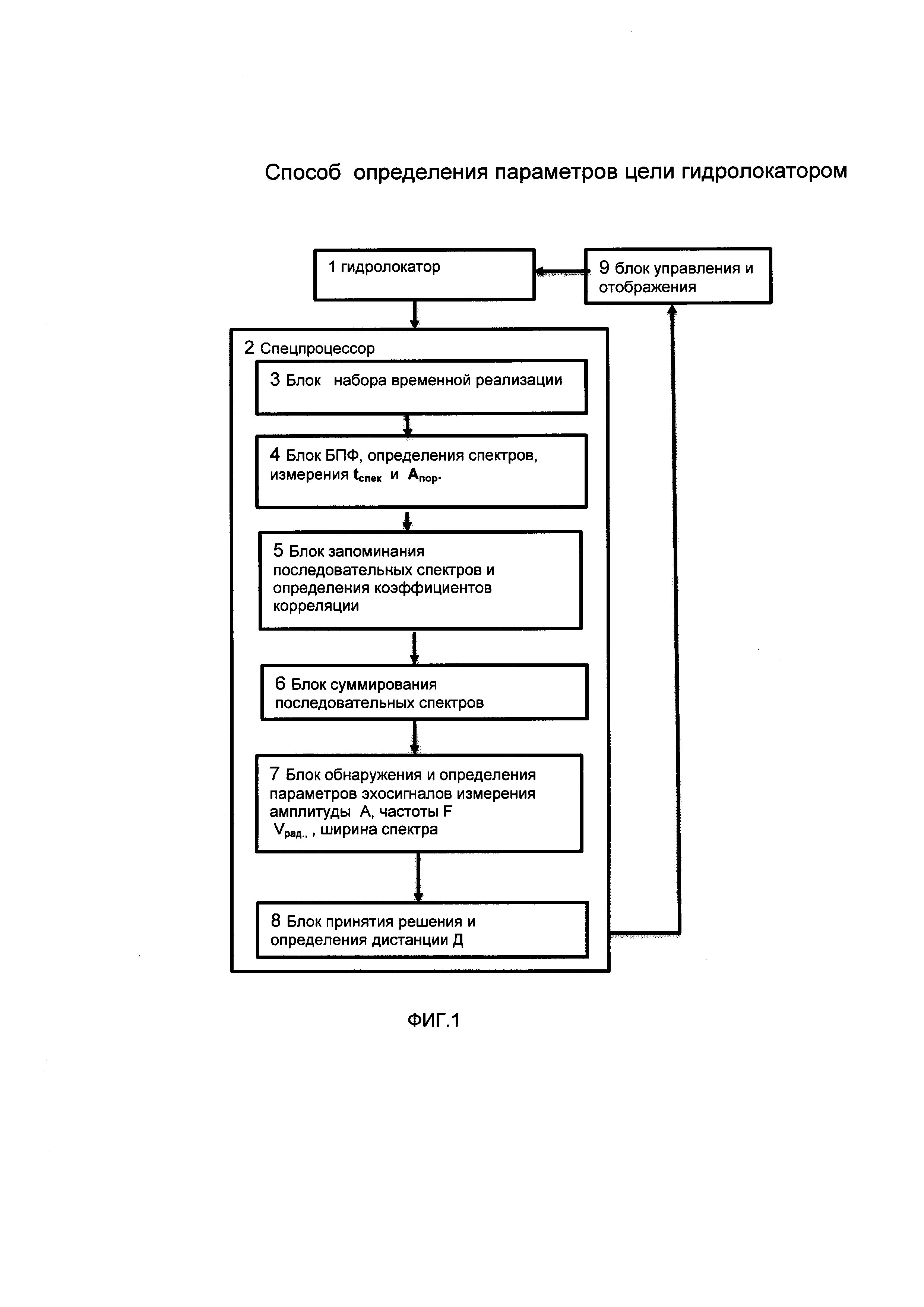
На фиг. 1 представлена блок схема устройства, реализующего предлагаемый способ. Устройство содержит гидролокатор 1, последовательно соединенный со спецпроцессором 2, в состав которого входят последовательно соединенные блок 3 набора временной реализации, блок 4 БПФ определения спектров, измерения tспек и Апор, блок 5 запоминания последовательных спектров и определения коэффициентов корреляции, блок 6 суммирования последовательных спектров, блок 8 обнаружения и определения параметров эхосигналов Vдоп., Vрев, ширина спектра, дистанции Д, блок 9 принятия решения.
Выход спецпроцессора 2 через блок 10 управления и отображения соединен с гидролокатором 1.
Операции предложенного способа целесообразно рассмотреть на примере работы реализующего его устройства.
По команде блока управления 10 гидролокатор 1 излучает зондирующий сигнал известной частоты Fизл и длительности Т. Это же гидролокатор принимает отраженный эхосигнала и передает его в спецпроцессор 2, где в блоке 3 производится последовательный набор временных реализаций длительностью Т.
Гидролокатор является известным устройством, который давно используется в отечественном приборостроении (А.Н. Яковлев, Г.П. Каблов. «Гидролокаторы ближнего действия». Л.: Судостроение. 1983).
В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также измерение амплитуд эхосигналов и временных отсчетов, а также принятие решения о цели. Эти вопросы достаточно подробно рассмотрены в литературе (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустическая техника». Санкт-Петербург. «Наука». 2004 г. Стр. 95-99, стр. 237-255).
Из блока 3 последовательные временные реализации поступают в блок 4, где производится определение энергетического спектра с использованием процедуры быстрого преобразования Фурье. Эта известная процедура, которая используется во всех современных систем обработки гидроакустической информации (см. там же). В этом же блоке могут быть реализованы процедуры измерения помехи, измерения времени поступления временных наборов и выбора порога Aпор. Последовательно выделенные спектры поступают в блок 5, где они запоминаются, и между соседними последовательными спектрами определяется коэффициент корреляции. Если коэффициент корреляции превысил значение 0,5, то эти спектры выделяются из всей последовательности и передаются в блок 6 суммирования последовательных спектров вместе со значениями коэффициентов корреляции, временами поступления временных наборов и параметрами помехи и Aпор. В блоке 7 производится обработка суммарного спектра отдельно по доплеровским каналам и по реверберационным каналам. Обнаруживаются спектральные отсчеты, которые превысили порог Aпор в доплеровских каналах и в реверберационных, определяются амплитуды максимальных отсчетов, определяется радиальная скорость и ширина спектра. Измеренные параметры эхосигнала передаются в блок 8 для принятия решения и определения дистанции.
Использование цифровой техники позволяет оперативно обрабатывать информацию любой сложности на основе разработанных алгоритмов. Эти вопросы достаточно подробно рассмотрены в книге «Применение цифровой обработки сигналов», под.ред. Оппенгейма, М.: Мир, 1980 г.
Таким образом, используя последовательные корреляционные свойства эхосигнала и отсутствие этих свойств у помехи, позволяет обнаруживать детерминированный сигнал на фоне распределенной помехи, а суммирование последовательных спектров повышает отношение сигнал/помеха, что позволяет считать задачу обнаружения эхосигнала и измерения параметров на фоне распределенной помехи решенной.
Способ определения параметров цели гидролокатором, содержащий излучение зондирующего сигнала длительностью Т на известной частоте F, прием эхосигнала в смеси с шумовой помехой гидроакустической антенной, дискретизацию электрического сигнала на выходе гидроакустической антенны, последовательный набор длительностью Т приемным устройством дискретизированных отсчетов, определение энергетического спектра с помощью процедуры быстрого преобразования Фурье (БПФ), определение энергетического спектра каждого набора, определение порога А, введены новые признаки, а именно производят последовательный анализ выделенных спектров, для чего запоминают спектры и времена их определения, определяют коэффициент корреляции КК между каждыми двумя последовательными спектрами, если коэффициент корреляции меньше 0,5, то спектр с более ранним временем реализации удаляют, снова определяют коэффициент корреляции образовавшейся пары спектров, и так до тех пор, пока коэффициент корреляции не превысит 0,5, после чего запоминают все последовательные N спектров, коэффициенты корреляции между которыми превысили 0,5 и времена их определения, суммируют амплитуды спектров и нормируют их к числу N, сравнивают амплитуды нормированных спектральных отсчетов с порогом А, выбирают спектральный отсчет с максимальной амплитудой А определяют частоту этого спектрального отсчета F и сравнивают с частотой излученного сигнала F, если F≠F+ΔF, где ΔF - смещение спектра за счет собственного движения, то принимают решение, что это движущаяся цель, и по значению F определяют радиальную скорость цели V, если F=F+ΔF, то определяют ширину спектра по числу отсчетов, достигших уровня 0,5 А, и при ширине спектра ≤1/Т принимают решение, что это обнаружена неподвижная цель с радиальной скоростью V=0, а дистанцию определяют по спектру с амплитудой А и максимальным коэффициентом корреляции.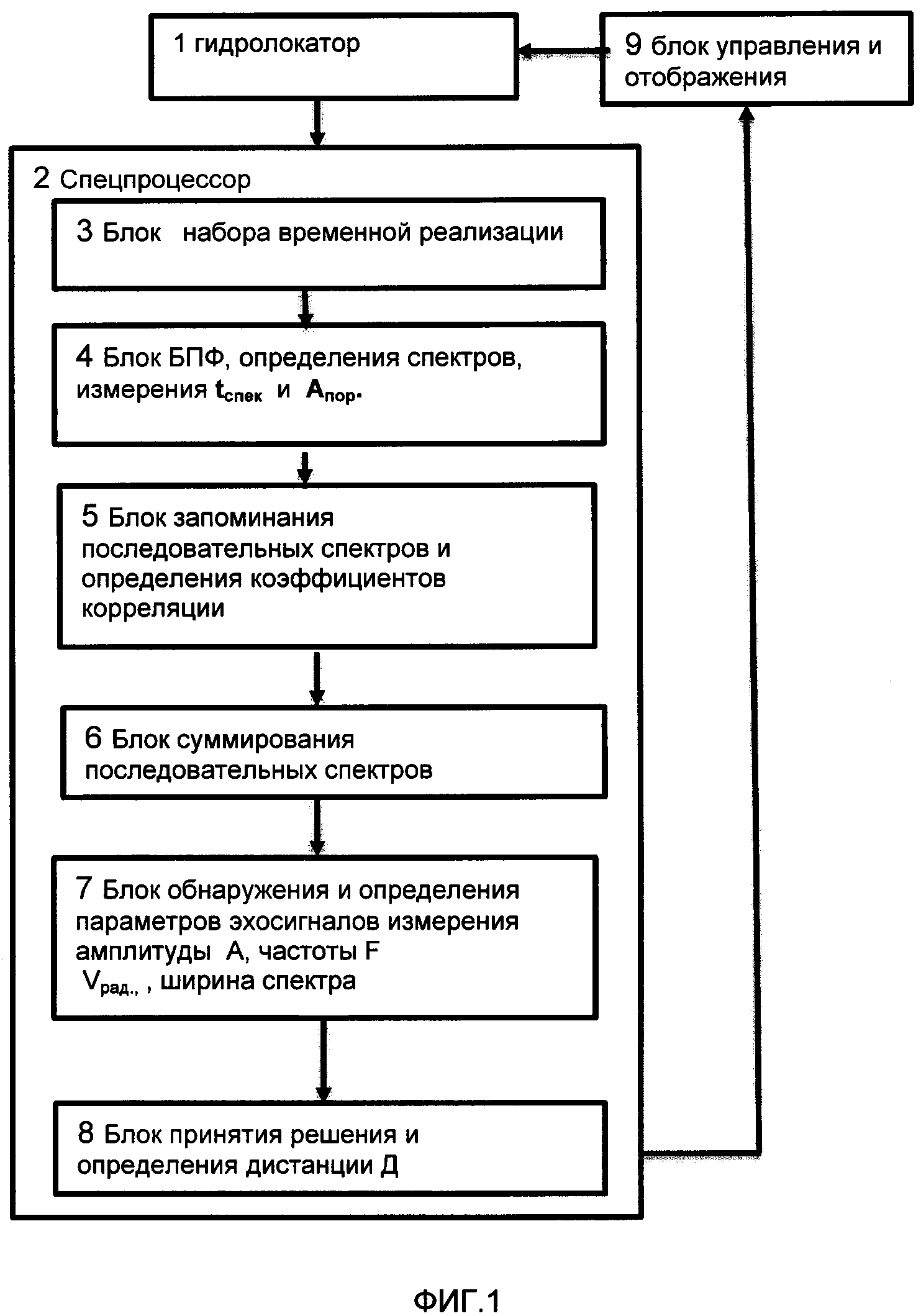
Устройство и способ контроля и регулировки плавучести гидрофонного модуля сейсмокосы
Гидроакустическая станция для обнаружения малоразмерных объектов
Способ пассивного определения координат источников гидроакустического излучения
Способ отождествления объектов, обнаруженных несколькими системами
Способ панорамной классификации шумящих объектов
Устройство измерения коэффициента корреляции
Способ классификации морских объектов в типовой шумопеленгаторной станции
Устройство для измерения характеристики направленности гидроакустической антенны
Ключевой регулятор напряжения
Способ определения параметров движения шумящего объекта
Способ классификации целей, адаптированный к гидроакустическим условиям
Способ определения глубины погружения объекта
Способ измерения скорости звука по трассе
Система автоматического обнаружения и классификации гидролокатора ближнего действия
Способ обнаружения объекта и измерения его параметров
Способ определения скорости звука
Способ измерения гидролокатором параметров вытекающего газа из трубы подводного газопровода
Способ определения маневра шумящего объекта
Способ обнаружения локального объекта на фоне распределенной помехи
Гидроакустический способ управления торпедой

