Результат интеллектуальной деятельности: Способ определения координат подводного объекта гидроакустической системой подводной навигации с юстировочным маяком
Вид РИД
Изобретение
Изобретение относится к области подводной навигации и предназначено для определения координат местоположения подводного объекта (ПО) с повышенной точностью, в частности подводных объектов, оборудованных приемопередатчиком гидроакустической навигационной системы.
Известны гидроакустические системы подводной навигации с длинной базой (ГАНС-ДБ или LBL системы), включающие навигационную базу из m гидроакустических навигационных маяков ответчиков (НМ), оборудованных гидроакустической приемо-передающей аппаратурой, которые устанавливаются в районе работы ПО, и размещенного на ПО гидроакустического приемопередатчика, одновременно опрашивающего навигационные маяки ответчики и получающего m ответов от каждого маяка на своей частоте.
ГАНС-ДБ (LBL системы) относятся к дальномерным навигационным системам, в которых способ определения координат основан на измерении набора наклонных дальностей (дистанций) между подводным объектом и навигационным маяком ответчиком, каждая из которых определяется через измеренный интервал времени между моментом запроса и моментом прихода ответного сигнала.
Расстояние, проходимое звуковым сигналом от передающей антенны ПО до НМ и обратно до приемной антенны ПО, определяют по формуле:

где
s - расстояние, проходимое сигналом;
 - средневзвешенная по глубине скорость звука;
- средневзвешенная по глубине скорость звука;
Δtp - время распространения звукового сигнала в воде;
T - измеренный интервал времени от момента подачи запроса до получения ответа
ΔT - известная для данной аппаратуры задержка на обработку запроса и ответ;
ε - погрешность измерения времени.
Соответственно, дистанция ri от ПО до i НМi равна половине пройденного сигналом расстояния s и определяется формулой:

Поверхность положения для дистанции от ПО до i НМi, представляет собой сферу радиуса ri. Уравнение поверхности положения описывается нелинейным уравнением вида:

здесь i=1, …, m - номер НМ;
xi, yi, zi - координаты i НМ в заданной прямоугольной системе Oxyz;
xno, yno zno - координаты ПО в заданной прямоугольной системе Oxyz.
В уравнении (3) координаты HMi известны с заданной точностью, неизвестными параметрами являются координаты ПО: xno, yno, zno, которые находятся по известным алгоритмам, например по алгоритму, изложенному в [1], путем решения системы из N нелинейных уравнения вида (3).
Недостатком данного способа является сравнительно большая по современным требованиям погрешность определения координат ПО (xno, yno zno), вызванная погрешностью в расчете по формуле (2) дистанции ri, зависящей от ошибок скорости звука  и ошибок исключения неоднозначности при определении момента прихода ответа от НМ, связанных с явлением многолучевости распространения звука при наличии отражающих границ раздела, которое наблюдается в мелком море.
и ошибок исключения неоднозначности при определении момента прихода ответа от НМ, связанных с явлением многолучевости распространения звука при наличии отражающих границ раздела, которое наблюдается в мелком море.
Известен способ навигации подводного объекта [2] посредством гидроакустической навигационной системы, который предназначен для повышения точности определения координат ПО, содержащей навигационную базу из m гидроакустических приемоответчиков с различными частотами ответа, размещенного на объекте навигации гидроакустического приемопередатчика и гидроакустических приемоответчиков, размещенных на дрейфующих станциях по водной поверхности. Навигационные параметры подводного объекта относительно дрейфующей станции или базы из дрейфующих станций определяют в режиме с длинной и/или ультракороткой базой, и/или в комбинированном режиме (длинная + ультракороткая база), и/или в пеленгационной системе, при этом формируют из приемников две навигационные базы с общим центром.
Суть данного способа заключается в повышении точности определения координат ПО за счет добавления дополнительных измерительных параметров, а именно пеленгов, которые повышают точностью расчетов, но при этом сохраняются ошибки знания скорости звука и ошибки от явления многолучевости.
Известен способ навигации подводного объекта [3] посредством гидроакустической навигационной системы, который предназначен для повышения точности определения координат ПО, содержащей навигационную базу из m гидроакустических приемоответчиков с различными частотами ответа, размещенного на ПО гидроакустического приемопередатчика и гидроакустических приемоответчиков, размещенных на дрейфующих станциях по водной поверхности. Навигационные параметры ПО относительно дрейфующей станции или базы из дрейфующих станций определяют в режиме с длинной и/или ультракороткой базой, и/или в комбинированном режиме (длинная + ультракороткая база), и/или в пеленгационной системе, при этом формируют из приемников две навигационные базы с общим центром, в которой обработку результатов измерений по пространственно-временным массивам наблюдений, определение координат ПО путем вычислений, отличающийся тем, что при вычислении координат выполняют минимизацию погрешности методом статистики Герста, а оценку среднего арифметического значения гидроакустической характеристики по пространственно-временным массивам наблюдений выполняют путем вычислений по многомерным квадратурным формулам и функциям Хаара.
Суть данного способа заключается в повышении точности определения координат ПО за счет добавления количества измеряемых параметров и использования статистических методов оценивания, которые повышают точностью расчетов, но при этом также сохраняются ошибки знания скорости звука и ошибки от явления многолучевости.
Наиболее близким к предлагаемому способу по количеству общих признаков и решаемой задаче является способ [4]. Этот способ основан на использовании донной навигационной базы из m НМ, на которых размещены гидроакустические приемоответчики с различными частотами ответа, размещенных на ПО гидроакустического передатчика, генератора синхроимпульсов, m-канального приемника, m измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно. В каждый из m каналов введены по числу лучевых траекторий n дополнительных измерителей времени распространения гидроакустических сигналов, n дополнительных блоков преобразования временных интервалов в дистанции, n дополнительных блоков выбора максимального значения дистанции и усреднитель дистанции. Выходы всех блоков выбора максимального значения дистанции соединены с входами усреднителя дистанций, а выход усреднителя дистанций соединен с входом вычислителя координат ПО.
С помощью данной системы реализован способ навигации подводного объекта, в котором гидроакустический передатчик ПО выдает акустический сигнал запроса, который принимают гидроакустические приемоответчики m НМ, и при приеме запросного сигнала излучают ответный сигнал на своей частоте. Эти ответные сигналы принимают m-канальным приемником ПО и передают в измеритель времени распространения гидроакустических сигналов до приемоответчиков НМ и обратно, а затем в m n блоков преобразования временных интервалов в дистанции, по которым осуществляют выбор минимальных значений дистанций от m НМ, по которым в вычислителе рассчитывают координаты ПО.
Данный способ направлен на повышение точности определения координат ПО за счет устранения ошибок от явления многолучевости, но в нем остаются ошибки связанные с ошибками знания скорости звука.
Величина является определяющим элементом при расчете дистанций ri, так как аппаратурная ошибка современных навигационных систем сравнительно мала. Она не является постоянной величиной, так как зависит от гидрологии места на момент проведения навигационных измерений.
Задачей изобретения является повышение точности определения координат ПО.
Технический результат заключается в уменьшении ошибок скорости звука , влияющей на погрешность расчета дистанции ri, что приводит к повышению точности определения координат ПО.
Заявленный технический результат достигается тем, что в способ навигации ПО посредством гидроакустической навигационной системы, содержащей навигационную базу из m НМ, на которых размещены гидроакустические приемоответчики с различными частотами ответа, и размещенного на ПО гидроакустического приемопередатчика, в котором гидроакустический приемопередатчик, с помощью генератора синхроимпульсов, в определенный момент излучает акустический сигнал запроса, который принимают гидроакустические приемоответчики m НМ, с помощью которых при приеме запросного сигнала излучают ответный сигнал на своей частоте, который принимают m-канальным приемником ПО и передают в измеритель времени распространения гидроакустических сигналов до гидроакустических приемоответчиков НМ и обратно, посредством m блоков преобразования временных интервалов в дистанции осуществляют выбор минимальных значений дистанций от m НМ, по которым в вычислителе рассчитывают координаты ПО, введены новые признаки, а именно: на ПО дополнительно устанавливают вычислитель расчетного параметра, в котором рассчитывают расчетное значение дистанции, и анализатор, предназначенный для расчета поправки к скорости звука, а из m гидроакустических приемоответчиков НМ выделяют гидроакустический приемоответчик юстировочного маяка (ЮМ), на который с ПО излучают акустический сигнал запроса, который принимают гидроакустическим приемоответчиком ЮМ, посредством гидроакустического приемоответчика ЮМ излучают ответный сигнал, который принимают m-канальным приемником ПО, передают в измеритель времени распространения, затем в блок преобразования временных интервалов в дистанцию, где определяют дистанция до ЮМ, которую в анализаторе сравнивают с расчетной дистанцией до ЮМ, рассчитанной в вычислителе расчетного параметра по известным координатам ЮМ и координатам ПО, полученным по всем НМ кроме ЮМ, если отклонения превышают заданное значение, переходят к следующей итерации, в которой рассчитывают поправку и уточняют значение средневзвешенной по глубине скорости звука, которую передают в блок преобразования временных интервалов в дистанции для расчета уточненных значений дистанций до всех НМ и ЮМ включительно, в вычислителе координат ПО по уточненным значениям дистанций до НМ рассчитывают уточненные координаты ПО на итерации, по которым и координатам ЮМ в блоке расчетного параметра рассчитывают новое расчетное значение дистанции до ЮМ на итерации и опять производят сравнение уточненного значения дистанции на итерации, полученной в блоке преобразования временных интервалов в дистанцию, и расчетного значения дистанции, полученной из блока расчетного параметра на итерации, в результате которого при выполнении условия, что отклонение не превышает заданного значения, принимают решение о завершении итерационного процесса и получении координат повышенной точности или о продолжении итерационного процесса, если отклонения превышают заданное значение, до тех пор, пока не выполнится вышеуказанное условие.
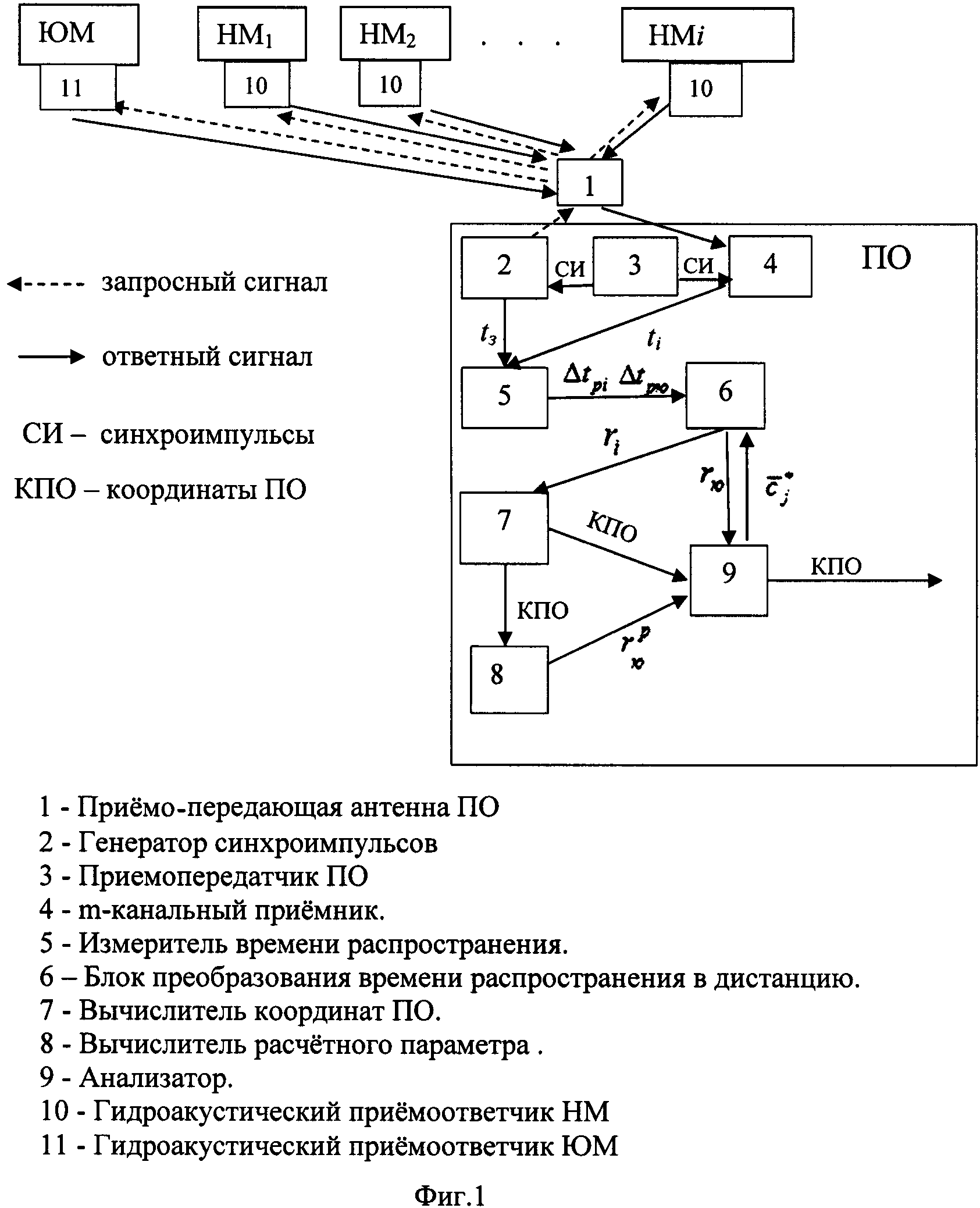
Сущность изобретения поясняется фиг. 1, на которой схематически изображена функциональная схема, реализующая способ. На фиг. 1 сплошная линия представляет запросный сигнал, пунктирная линия - ответный сигнал, СИ - синхроимпульсы. КПО - координаты ПО.
В предлагаемом способе передатчик 2 ПО с помощью генератора синхроимпульсов 3 через приемо-передающую антенну 1 в момент времени tз излучает акустический сигнал запроса, который принимают гидроакустические приемоответчиками 10 навигационных маяков, включая гидроакустический приемоответчик 11 ЮМ (HMi, i=1, …, m-1, ЮМ).
Каждый из приемоответчиков 10 НМ и 11 ЮМ при приеме запросного сигнала излучает ответный сигнал на своей частоте, который принимают m-канальным приемником 4 ПО в момент времени ti и передают в измеритель времени распространения гидроакустических сигналов 5 до приемоответчиков и обратно Δtpi, Δtрю,.. Затем в блоке преобразования временных интервалов в дистанцию 6 рассчитывают дистанции ri(i=1, …, m-1) и rю по формуле (2) в каждом из M каналов. По дистанциям ri от HMi 10 (i=1,…, m-1) и координатам HMi xi, yi zi в вычислителе координат ПО 7 вычисляют координаты ПО xno, yno zno, которые передают в вычислитель расчетного параметра 8. В вычислителе 8 по xno, yno zno и xю, yю zю по формуле (3) рассчитывают расчетное значение дистанции  между ПО и ЮМ 11, которое передают в анализатор 9. В анализаторе 9 производится сравнение (проверка) следующего условия:
между ПО и ЮМ 11, которое передают в анализатор 9. В анализаторе 9 производится сравнение (проверка) следующего условия:

где ε - заданная величина.
Если условие (4) не выполняется, то в анализаторе 9 по формуле (6) рассчитывают поправку к скорости звука  и по формуле (7) производят уточнение значения скорости
и по формуле (7) производят уточнение значения скорости  для следующей итерации. Формула для расчета поправки к средневзвешенной по глубине скорости звука получается из выражений (2), которое можно представить в следующем виде:
для следующей итерации. Формула для расчета поправки к средневзвешенной по глубине скорости звука получается из выражений (2), которое можно представить в следующем виде:

где
 - расчетное значение средневзвешенной по глубине скорости звука на итерации;
- расчетное значение средневзвешенной по глубине скорости звука на итерации;
 - поправка к расчетному значению средневзвешенной по глубине скорости звука.
- поправка к расчетному значению средневзвешенной по глубине скорости звука.
Поправка  получается из (5) с учетом (3) при условии, что
получается из (5) с учетом (3) при условии, что  .
.

где xю, yю, zю - координаты ЮМ 11 в заданной прямоугольной системе Oxyz;
 ,
,  ,
,  - уточненные в соответствии с [1] координаты ПО в заданной прямоугольной системе Oxyz.
- уточненные в соответствии с [1] координаты ПО в заданной прямоугольной системе Oxyz.
Уточнение средневзвешенной по глубине скорости звука производят итерационным способом по следующей формуле:

где
j - номер итерации;
 - расчетная средневзвешенная по глубине скорость звука на j итерации;
- расчетная средневзвешенная по глубине скорость звука на j итерации;
 - поправка к средневзвешенной по глубине скорости звука на j итерации;
- поправка к средневзвешенной по глубине скорости звука на j итерации;
 - уточненное значение средневзвешенной по глубине скорости звука.
- уточненное значение средневзвешенной по глубине скорости звука.
Полученное значение  передают в блок преобразования временных интервалов в дистанцию 6 для расчета по времени распространения Δtpi, Δtрю уточненных значений ri (i=1, …, m-1), rю, затем в вычислителе координат 7 вычисляют уточненные координаты ПО xno, yno, zno, которые передают в вычислитель расчетного параметра 8, в котором рассчитывают уточненное значение дистанции
передают в блок преобразования временных интервалов в дистанцию 6 для расчета по времени распространения Δtpi, Δtрю уточненных значений ri (i=1, …, m-1), rю, затем в вычислителе координат 7 вычисляют уточненные координаты ПО xno, yno, zno, которые передают в вычислитель расчетного параметра 8, в котором рассчитывают уточненное значение дистанции  между ПО и ЮМ, которое передают в анализатор 9. В анализаторе 9 производят сравнение
между ПО и ЮМ, которое передают в анализатор 9. В анализаторе 9 производят сравнение  и rю. Процесс итераций при вычислений координат ПО заканчивается при выполнении условия (7), при этом координаты ПО найдены с повышенной точностью. Это позволяет считать, что заявленный технический результат достигнут.
и rю. Процесс итераций при вычислений координат ПО заканчивается при выполнении условия (7), при этом координаты ПО найдены с повышенной точностью. Это позволяет считать, что заявленный технический результат достигнут.
Источники информации
1 В.И. Бородин и др. Гидроакустические навигационные средства. Ленинград. Судостроение. 1983 г.
2 Патент РФ №2365939, G01S 15/08. Способ навигации подводного объекта. Дата публикации патента 27.08.2009.
3 Патент РФ №2444759, G01S. Способ навигации подводного объекта посредством гидроакустической навигационной системы. Дата публикации патента 10.03.2012.
4 Патент РФ №2032187, G01S 15/08. Гидроакустическая синхронная дальномерная навигационная система. Дата публикации патента 27.03.1995.
Способ навигации подводного объекта посредством гидроакустической навигационной системы, содержащей навигационную базу из m навигационных маяков (НМ), на которых размещены гидроакустические приемоответчики с различными частотами ответа, и размещенного на подводном объекте (ПО) гидроакустического приемопередатчика, в котором гидроакустический приемопередатчик, с помощью генератора синхроимпульсов, в определенный момент излучает акустический сигнал запроса, который принимают гидроакустические приемоответчики m НМ, с помощью которых при приеме запросного сигнала излучают ответный сигнал на своей частоте, который принимают m-канальным приемником ПО и передают в измеритель времени распространения гидроакустических сигналов до гидроакустических приемоответчиков НМ и обратно, посредством m блоков преобразования временных интервалов в дистанции осуществляют выбор минимальных значений дистанций от m НМ, по которым в вычислителе рассчитывают координаты ПО, введены новые признаки, а именно: на ПО дополнительно устанавливают вычислитель расчетного параметра, в котором рассчитывают расчетное значение дистанции, и анализатор, предназначенный для расчета поправки к скорости звука, а из m гидроакустических приемоответчиков НМ выделяют гидроакустический приемоответчик юстировочного маяка (ЮМ), на который с ПО излучают акустический сигнал запроса, который принимают гидроакустическим приемоответчиком ЮМ, посредством гидроакустического приемоответчика ЮМ излучают ответный сигнал, который принимают m-канальным приемником ПО, передают в измеритель времени распространения, затем в блок преобразования временных интервалов в дистанцию, где определяют дистанцию до ЮМ, которую в анализаторе сравнивают с расчетной дистанцией до ЮМ, рассчитанной в вычислителе расчетного параметра по известным координатам ЮМ и координатам ПО, полученным по всем НМ кроме ЮМ, если отклонения превышают заданное значение, переходят к следующей итерации, в которой рассчитывают поправку и уточняют значение средневзвешенной по глубине скорости звука, которую передают в блок преобразования временных интервалов в дистанции для расчета уточненных значений дистанций до всех НМ и ЮМ включительно, в вычислителе координат ПО по уточненным значениям дистанций до НМ рассчитывают уточненные координаты ПО на итерации, по которым и координатам ЮМ в блоке расчетного параметра рассчитывают новое расчетное значение дистанции до ЮМ на итерации и опять производят сравнение уточненного значения дистанции на итерации, полученной в блоке преобразования временных интервалов в дистанцию, и расчетного значения дистанции, полученной из блока расчетного параметра на итерации, в результате которого при выполнении условия, что отклонение не превышает заданного значения, принимают решение о завершении итерационного процесса и получении координат повышенной точности или о продолжении итерационного процесса, если отклонения превышают заданное значение, до тех пор, пока не выполнится вышеуказанное условие.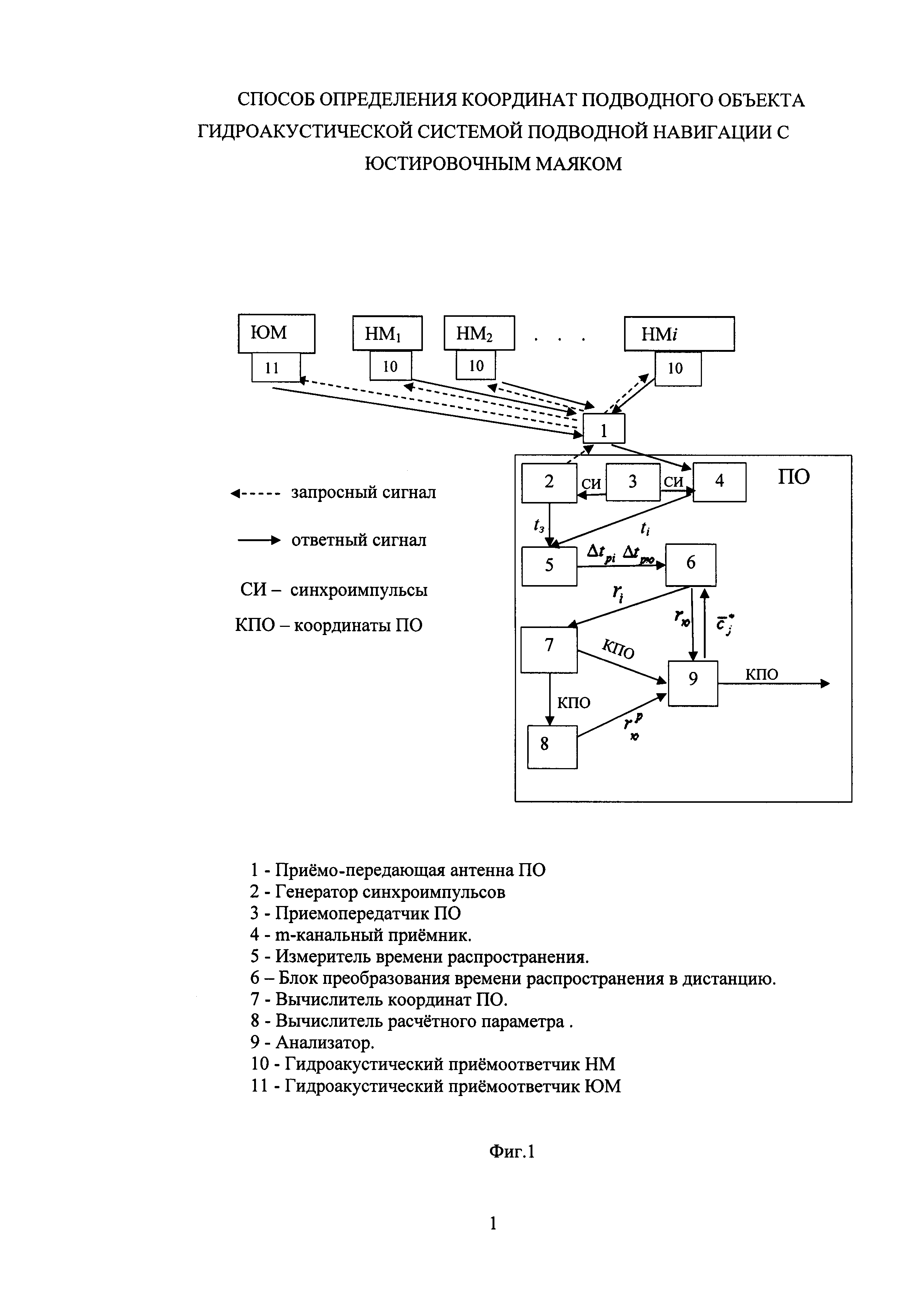

Способ обработки гидролокационной информации
Устройство классификации шумящих объектов
Устройство определения водоизмещения надводного корабля при его шумопеленговании
Способ обнаружения шумящих в море объектов
Бистатический способ обнаружения подводной цели и бистатический гидролокатор
Способ наведения торпеды, управляемой по проводам
Гидролокационный способ обнаружения объекта и измерения его параметров
Способ классификации морских объектов пассивными гидроакустическими средствами
Устройство для съемки рельефа дна акватории
Система для синхронизации аналого-цифровых преобразователей с избыточной частотой дискретизации
Способ определения выживаемости у больных опухолями проксимальных желчных протоков в предоперационном периоде
Ускоритель плазмы
Способ определения географических координат подводного объекта
Способ паренхимосохраняющей левосторонней гемигепатэктомии

