Результат интеллектуальной деятельности: СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ
Вид РИД
Изобретение
Изобретение относится к области морской техники и может быть использовано для поиска подводных объектов и наблюдения за подводной средой.
Известно, что для наблюдения за подводной средой на флотах мира используют различные измерительные устройства, основанные на регистрации в водной среде объектов и присущих им физических полей. Из-за особенностей распространения в воде различных видов энергии наиболее широкое распространение получили гидроакустические средства наблюдения, основанные на законах распространения в воде звука.
В 1881 г. русский офицер С.О. Макаров изобрел флюктомер - первый гидроакустический прибор, измеряющий скорость течения и имеющий гидроакустический канал связи. Его же считают и изобретателем первого гидрофона для приема гидроакустических сигналов, создаваемых ходовыми шумами быстроходных минных катеров, которые в 1904 г. адмирал С.О. Макаров предложил устанавливать на боковых ограждениях и дебаркадерах у входа в военно-морские базы для предварительного оповещения о нападении легких сил противника [1 - Корж И.Г. Зарождение и развитие отечественного гидроакустического противодействия и подавления. Диссертация на соискание ученой степени кандидата технических наук. Санкт-Петербургский филиал Института истории естествознания и техники им. С.И. Вавилова РАН. СПб.: 2010. http://www.dissercat.com/content/zarozhdenie-i-razvitie-otechestvennogo-gidroakusticheskogo-protivodeistviva-i-podavleniva].
Уже к началу Второй Мировой войны гидролокаторами было вооружено около 200 надводных кораблей различных классов в Великобритании и более 60 эсминцев в США. Американские гидролокаторы «Сонар» и английские «Асдик» имели дальность обнаружения подводных лодок до 2 км. Подводные лодки оснащались в основном шумопеленгаторными станциями и могли обнаруживать крупные надводные корабли и суда на дистанциях до 10…20 км [1 - Корж И.Г. Зарождение и развитие отечественного гидроакустического противодействия и подавления. Диссертация на соискание ученой степени кандидата технических наук. Санкт-Петербургский филиал Института истории естествознания и техники им. С.И. Вавилова РАН. СПб.: 2010. http://www.dissercat.com/content/zarozhdenie-i-razvitie-otechestvennogo-gidroakusticheskogo-protivodeistviya-i-podavleniva].
В дальнейшем гидролокаторы и шумопеленгаторы были объединены в одно устройство, получившее название гидроакустической станции (ГАС). С помощью ГАС производят поиск, обнаружение, классификацию и определение координат морских целей, а также выдачу необходимых данных в приборы управления морским подводным оружием. ГАС подразделяют по принципу работы на активные или гидролокационные станции (ГЛС) и пассивные шумопеленгаторные станции (ШПС), по месту установки - на авиационные, автономные, корабельные, стационарные, по назначению - на станции классификации целей, миноискания, помех, разведки и связи [2 - Военно-морской словарь /Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989]. Дальность обнаружения подводных объектов современными ГАС может достигать 100 км и более [3 - Энциклопедия будущего адмирала. О флоте и кораблях. СПб.: ООО «Издательство «Полигон», 2003].
Для наблюдения за подводной средой на флотах применяются и другие технические устройства: авиационные радиогидроакустические буи (РГБ), стационарные гидроакустические системы (СГАС) [4 - Сурнин В.В., Пелевин Ю.Н., Чулков В.Л. Противолодочные средства иностранных флотов. - М.: Воениздат, 1991], необитаемые подводные аппараты (НПА), оснащенные ГЛС [5 - Автономные подводные аппараты. Материалы сайта Института проблем морских технологий Дальневосточного отделения РАН, 2002].
НПА стали разрабатывать в конце 1960-х гг. В СССР первыми нашли применение автономные необитаемые подводные аппараты (АНПА) «Скат» (1974) и «Скат-гео» (1978), разработанные для океанологических исследований и морской геологоразведки [5 - Автономные подводные аппараты. Материалы сайта Института проблем морских технологий Дальневосточного отделения РАН, 2002]. Сейчас это направление развития морской техники в ведущих морских державах является приоритетным и предусматривает создание и применение автономных и дистанционно управляемых НПА с надводных кораблей и подводных лодок [6 - Белоусов И. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение №5, 2013. С. 79-88].
С 1996 г. в ВМС США реализуется программа разработки АНПА нового поколения «Манта», предназначенных для обнаружения и уничтожения подводных лодок, мин и других подводных целей, а также ведения разведки, решения обеспечивающих и специальных задач [7 - Сиденко К.С., Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат // МРЭ, №2, 2008].
Бортовая поисковая аппаратура НПА включает ГЛС переднего и бокового обзора, цифровую видеокамеру, датчики для измерения параметров морской воды (температуры и удельной электрической проводимости). Полученные данные записываются на жесткий магнитный накопитель для последующего анализа результатов после подъема НПА на борт носителя. Для обеспечения двусторонней связи между пунктом управления и НПА в позиционном положении используют системы спутниковой навигации и звукоподводной связи (ЗПС). Для применения НПА и управления им на позиции на носитель устанавливают модули в габаритах морских транспортных контейнеров, спускоподъемное устройство, сменный комплект аккумуляторных батарей и автоматизированное рабочее место (АРМ) оператора. АРМ оператора комплектуется персональным переносным компьютером и предназначено для планирования операции, ввода данных, отображения на дисплее с цветовым кодированием информации формы и размеров гидролокационного изображения объекта [6 - Белоусов И. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение №5, 2013. С. 79-88].
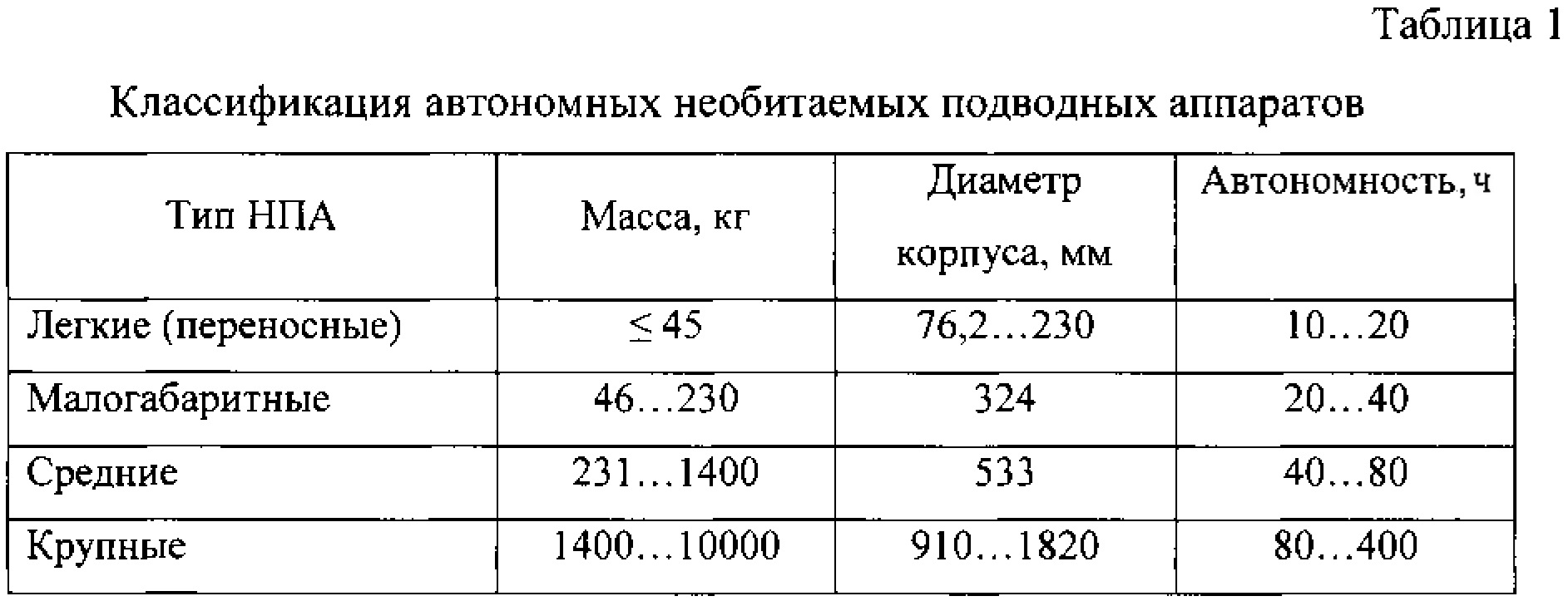
С 2004 г. в ВМС США действует генеральный план разработки автономных НПА и их условная классификация, согласно которой НПА подразделяют на легкие или переносные, малогабаритные, средние и крупные (см. табл. 1) [6 - Белоусов И. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение №5, 2013. С. 79-88].
НПА имеют корпус обтекаемой цилиндрической или иной формы, средства движения и энергообеспечения, гидроакустические и телевизионные средства поиска подводных объектов, навигационное оборудование, средства связи, отсек для полезной нагрузки, приборы управления. Для передачи на пункт управления информации об обнаруженных подводных объектах НПА оборудуют аппаратурой связи с гидроакустическим или радиотехническим каналом. Точность определения координат обнаруженных НПА объектов зависит от ошибок его навигационной системы, для уменьшения которых, особенно при длительной автономной работе, НПА оборудуют системой спутниковой навигации. Периодичность сеанса уточнения места НПА зависит от требуемой точности навигации и характеристик имеющейся навигационной системы [7 - Сиденко К.С., Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат // МРЭ, №2, 2008].
В настоящее время в ВМС США появились автономные НПА с переменной плавучестью (планирующие и дрейфующие) - глайдеры, имеющие автономность несколько месяцев и обладающие малой гидроакустической заметностью. Их оснащают бортовыми измерительно-информационными комплексами, периодически передающими данные измерений по каналам управления и связи на систему якорных донных станций (гидроакустический канал) или на искусственный спутник Земли при периодических всплытиях (радиотехнический канал). Такие НПА могут найти применение для скрытного сбора гидрологической и другой информации. Управление НПА осуществляют по программе бортового процессора с использованием магнитного компаса, считывающего устройства, глубиномера, кренометра и дифферентометра. Каждые 2-3 ч производят всплытие НПА в позиционное положение для обмена данными с пунктом управления с помощью аппаратуры системы спутниковой связи "Иридиум", а также для уточнения местоположения по данным космической радионавигационной системы "Навстар", антенные устройства которых установлены на вертикальном стабилизаторе [6 - Белоусов И. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение №5, 2013. С. 79-88].
В целях дистанционного управления подводными аппаратами и другими подводными объектами используют акустический модем [8 - Акустический модем АМ-300. http://www.diveservice.ru/] или реактивный шифровой заряд [9 - Патент RU 2510355 С2. Реактивный шифровой заряд (варианты)/ Новиков А.В., Цапко С.А. - М.: ФИПС, 2014. Бюл. №9].
Известно, что множество элементов, находящихся в закономерных отношениях и связях друг с другом, образующих определенную целостность, единство и подчиненность определенному организующему признаку, представляют собой систему, а в совокупности со способами и правилами их использования - смешанную систему [2 - Военно-морской словарь /Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989].
Рассмотренные выше технические устройства (ГАС, РГБ и НПА) входят составляющими элементами в создаваемые мобильные и стационарные системы освещения подводной обстановки (СОПО). Время функционирования СОПО может составлять от нескольких часов до нескольких суток на период выполнения ею поисковых задач (носители с ГАС, РГБ), а также достигать нескольких месяцев и даже лет (НПА с большой автономностью и СГАС).
При длительном функционировании АНПА точность работы его бортовой навигационной аппаратуры постепенно снижается. С целью ее повышения АНПА оснащают дополнительно системой спутниковой навигации [7 - Сиденко К.С., Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат // МРЭ, №2, 2008 - наиболее близкое техническое решение] или гидроакустической навигационной системой (ГНС) [10 - Матвиенко Ю.В. Гидроакустический комплекс навигации подводного робота. Диссертация на соискание ученой степени доктора технических наук. - Владивосток, 2004. http://www.dissercat.com/content/gidroakusticheskii-kompleks-navigatsii-podvodnogo-robota#ixzz2fPt3Bsov]. Недостатком известной системы является необходимость периодического уточнения ею географических координат АНПА с использованием космических или гидроакустических навигационных систем, возникающая вследствие постепенно уменьшающейся точности позиционирования своего места бортовой системой управления АНПА. Известно, что работа каналов спутниковой навигации GPS или ГЛОНАСС в угрожаемый период может быть нарушена, а функционирование ГНС требует дополнительной установки в районе действий АНПА гидроакустических маяков и других объектов для географической привязки к местности. В связи с этим, обеспечение требуемой точности работы бортовой навигационной системы АНПА остается актуальной задачей.
В качестве другого недостатка СОПО с АНПА отмечаются его недостаточные возможности для слежения за быстроходными подводными объектами и объектами, которые пытаются скрыться от наблюдения. Поэтому использование АНПА в таких СОПО эффективно лишь для поиска малоподвижных объектов.
Известны СОПО, в состав которых входят радиогидроакустические буи, размещенные на ракете. Это радиогидроакустический буй реактивный (РГБР) [11 - Патент RU 2400392 С1. Устройство радиогидроакустический буй реактивный/ Новиков А.В., Никитченко Н.П., Долбилин Р.В., Никитченко С.Н. - М: ФИПС, 2010. Бюл. №27] или реактивная система освещения подводной обстановки (РСОПО), представляющая собой себя ракету с размещенными на ней РГБ и взрывным источником звука (ВИЗ) [12 - Патент RU 2510353 С2. Реактивная система освещения подводной обстановки/ Форостяный А.А., Новиков А.В. - М.: ФИПС, 2014. Бюл. №9]. На надводном корабле в счетно-решающем приборе рассчитывают траекторию РГБР или РСОПО и с помощью приборов управления стрельбой вводят в РГБР или РСОПО полетное задание, наводят пусковую установку и выполняют стрельбу РГБР или РСОПО в расчетную точку. После выстрела и сгорания топлива ракетный двигатель отделяют от корпуса ракеты. Приводнившуюся головную часть с РГБ погружают на заданную глубину, приводят в рабочее положение гидрофоны и начинают обследовать подводную среду. Недостатком данных СОПО является необходимость знания первичной информации о подводном объекте или о возможном его местонахождении, иначе применение РГБР и РСОПО, как и авиационных РГБ, будет малорезультативным. В случае же первичного обнаружения искомого подводного объекта использование в СОПО РГБР и РСОПО позволяет отслеживать перемещение в пространстве и быстроходных подводных объектов.
Целью изобретения является разработка системы освещения подводной обстановки, которая обеспечит требуемую точность позиционирования АНПА на маршруте поиска подводных объектов в заданном районе независимо от функционирования систем спутниковой и гидроакустической навигации, а также ведение наблюдение за быстроходными и маневрирующими подводными объектами.
Техническим результатом изобретения является разработка системы освещения подводной обстановки, которая в условиях отсутствия систем спутниковой и гидроакустической навигации обеспечивает в течение установленного времени заданную точность маршрута АНПА при выполнении им поиска подводных объектов в районе обследования, а значит и точность координат обнаруживаемых объектов, а также исключает возможный отрыв обнаруженного подводного объекта от наблюдения. Такая СОПО реализует указанную цель и известный способ освещения подводной обстановки с использованием АНПА [13 - Патент RU 2578807 С2. Способ освещения подводной обстановки/ Новиков А.В., Корнеев Г.Н., Королев В.Э. - М.: ФИПС, 2016. Бюл. №9].
Предлагается система освещения подводной обстановки (СОПО), состоящая из пункта управления - надводного корабля и/или берегового поста, автономного необитаемого подводного аппарата (АНПА), канала управления и связи пункта управления с АНПА с приемо-передающими устройствами подсистемы звукоподводной связи, канала контроля подводного объекта гидролокатором АНПА. Дополнительно в состав СОПО включаются радиогидроакустический буй реактивный (РГБР), и/или реактивный шифровой заряд (РШЗ), и/или реактивная система освещения подводной обстановки (РСОПО), канал контроля АНПА и подводного объекта посредством РГБР и/или РСОПО, канал управления и связи пункта управления с АНПА через РГБР, и/или РСОПО, и/или РШЗ, на АНПА дополнительно устанавливаются в канале контроля подводного объекта шумопеленгатор и в подсистеме звукоподводной связи акустический модем и устройство расшифровки сигналов шифрового заряда, на пункте управления устанавливаются пусковая установка для хранения и пуска АНПА, пусковая установка для хранения и пуска РГБР и/или РСОПО, вычислительное и сигнальное устройства, в подсистеме звукоподводной связи акустический модем.
Пусковая установка предназначена для хранения АНПА, РГБР и/или РСОПО на пункте управления, подготовки их к пуску и пуска в район поиска подводных объектов.
Вычислительное устройство служит для расчета координат АНПА, двигающегося в заданном районе по установленной в его бортовую систему управления программе поиска подводных объектов. С помощью вычислительного устройства определяют момент, когда в условиях не функционирования систем спутниковой и гидроакустической навигации точность работы бортовой навигационной системы АНПА снижается до критического или заданного уровня. В этом случае с помощью вычислительного устройства рассчитывают траекторию РГБР для стрельбы в район действия АНПА и уточняют географическое место АНПА по известным координатам точки приводнения РГБР и относительного расположения от нее АНПА, шумопеленгатором которого фиксируют факт приводнения РГБР. В вычислительном устройстве вычисляют координаты подводного объекта, обнаруженного АНПА, параметры его движения, привязывая их к известным координатам РГБР. В случае необходимости рассчитывают параметры заградительного барьера РГБР или РСОПО, а также маневр АНПА для его перехода в новую точку для повторного поиска подводного объекта [13 - Патент RU 2578807 С2. Способ освещения подводной обстановки/ Новиков А.В., Корнеев Г.Н., Королев В.Э. - М.: ФИПС, 2016. Бюл. №9].
РГБР и РСОПО предназначены для наблюдения за подводной средой в районе, ограниченном дальностью их действия, а также для передачи информации и сигналов управления по радио- и звукоподводной связи между пунктом управления и АНПА.
РШЗ служит для передачи АНПА, удаленному от пункта управления, акустических сигналов управления, воспринимаемых его шумопеленгатором и устройством расшифровки сигналов.
ВИЗ, входящий в состав РСОПО, предназначен для излучения мощного импульса акустической энергии и облучения ею окружающих предметов для последующего приема шумопеленгатором АНПА отраженных сигналов и обнаружения подводных объектов.
Шумопеленгатор используется АНПА для ведения скрытного поиска подводных объектов и обнаружения приводнившихся РГБР или РГБ.
Акустический модем служит для быстрой передачи большого объема информации по каналу звукоподводной связи между пунктом управления, АНПА, РГБР и РСОПО.
Сигнальное устройство предупреждает оператора пункта управления АНПА звуковым и/или световым сигналом о важных событиях в работе СОПО: обнаружении подводного объекта, снижении требуемой точности позиционирования места бортовой навигационной системы АНПА, а также потери контакта с подводным объектом.
Техническое осуществление предлагаемой системы освещения подводной обстановки и взаимодействие ее элементов друг с другом поясняются чертежами, на которых:
фиг. 1 - схема работы существующей СОПО с АНПА;
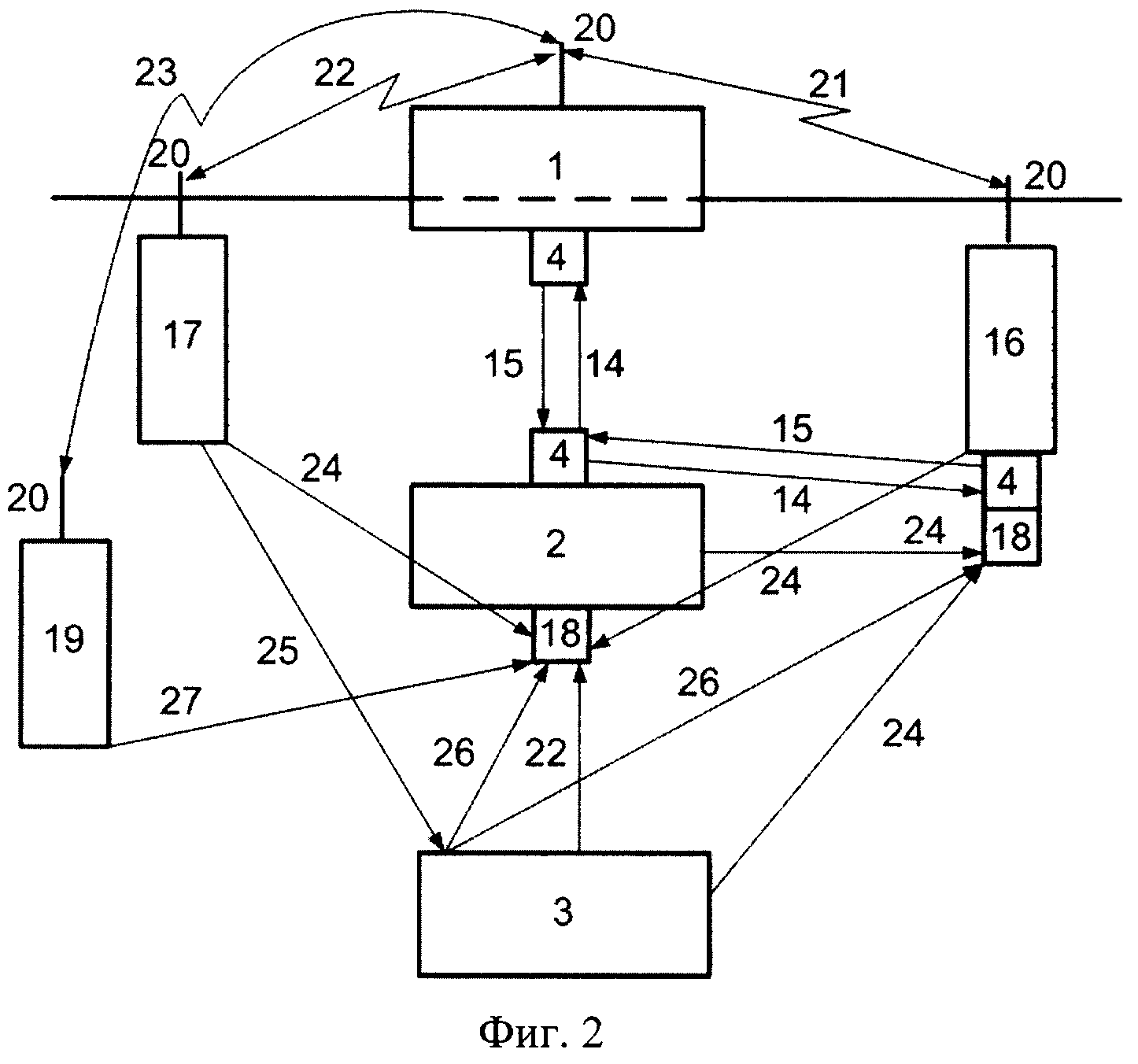
фиг. 2 - схема работы предлагаемой СОПО с АНПА.
На фиг. 1 показана схема работы СОПО с АНПА, являющейся прототипом изобретения. Основные элементы такой СОПО: 1 - пункт управления (надводный корабль или береговой пост), 2 - АНПА, 3 - подводный объект (цель), 4 – приемо-передающие устройства подсистемы звукоподводной связи (ЗПС), 5 - гидролокатор АНПА, 6 - подсистема космической навигации, 7 - навигационный космический аппарат (КА), 8 - канал связи АНПА с КА, 9 - гидроакустическая навигационная подсистема (ГНПС) АНПА, 10 - элемент ГНПС, 11 - канал связи ГНПС, 12, 13 - канал контроля подводного объекта, в котором 12 - излучающий сигнал гидролокатора АНПА, 13 - отраженный от подводного объекта сигнал гидролокатора, 14, 15 - канал управления и связи пункта управления с АНПА, в котором 14 - информация, передаваемая АНПА на пункт управления об обнаружении цели, 15 - команды пункта управления АНПА.
На фиг. 2 схематично показаны элементы системы освещения подводной обстановки, где 1 - пункт управления (надводный корабль или береговой пост), 2 - АНПА, 3 - искомый подводный объект, 4 - приемо-передающие устройства подсистемы звукоподводной связи (ЗПС), 14, 15 - канал управления АНПА и связи его с пунктом управления, в котором 14 - информация, передаваемая АНПА через РГБ (16) на пункт управления по каналу связи (21), 15 - команда управления АНПА, передаваемая с пункта управления (1) через РГБ (16) по каналу связи (21), 16 - РГБ (РГБР), 17 - ВИЗ, 18 - шумопеленгатор, 19 - РШЗ, 20 - радиоантенна, 21, 22, 23 - каналы связи пункта управления с РГБ (РГБР), ВИЗ и РШЗ, 24 - шум, излучаемый движущимися подводным объектом и АНПА, а также приводнившимися РГБ (РГБР) и ВИЗ, 25 - акустический импульс, излучаемый ВИЗ, 26 - акустический импульс ВИЗ, отраженный от подводного объекта, 27 - команда управления АНПА, излучаемая РШЗ (19) и переданная по каналу связи (23) с пункта управления.
Элементы 5-13 на фиг. 2 не показаны, так как их использование в предлагаемой СОПО не обязательно, хотя и возможно аналогично СОПО, приведенной на фиг. 1, где 5 - гидролокатор АНПА, 6 - подсистема космической навигации, 7 - навигационный космический аппарат (КА), 8 - канал связи АНПА с КА, 9 - гидроакустическая навигационная подсистема (ГНПС) АНПА, 10 - элемент ГНПС, 11 - канал связи ГНПС, 12, 13 - канал контроля подводного объекта, в котором 12 - излучающий сигнал гидролокатора АНПА, 13 - отраженный от подводного объекта сигнал гидролокатора.
Достижение положительного эффекта при осуществлении предложенного устройства подтверждается сведениями, приведенными в Таблице 2 «Ожидаемые эксплуатационные свойства предложенного технического решения».
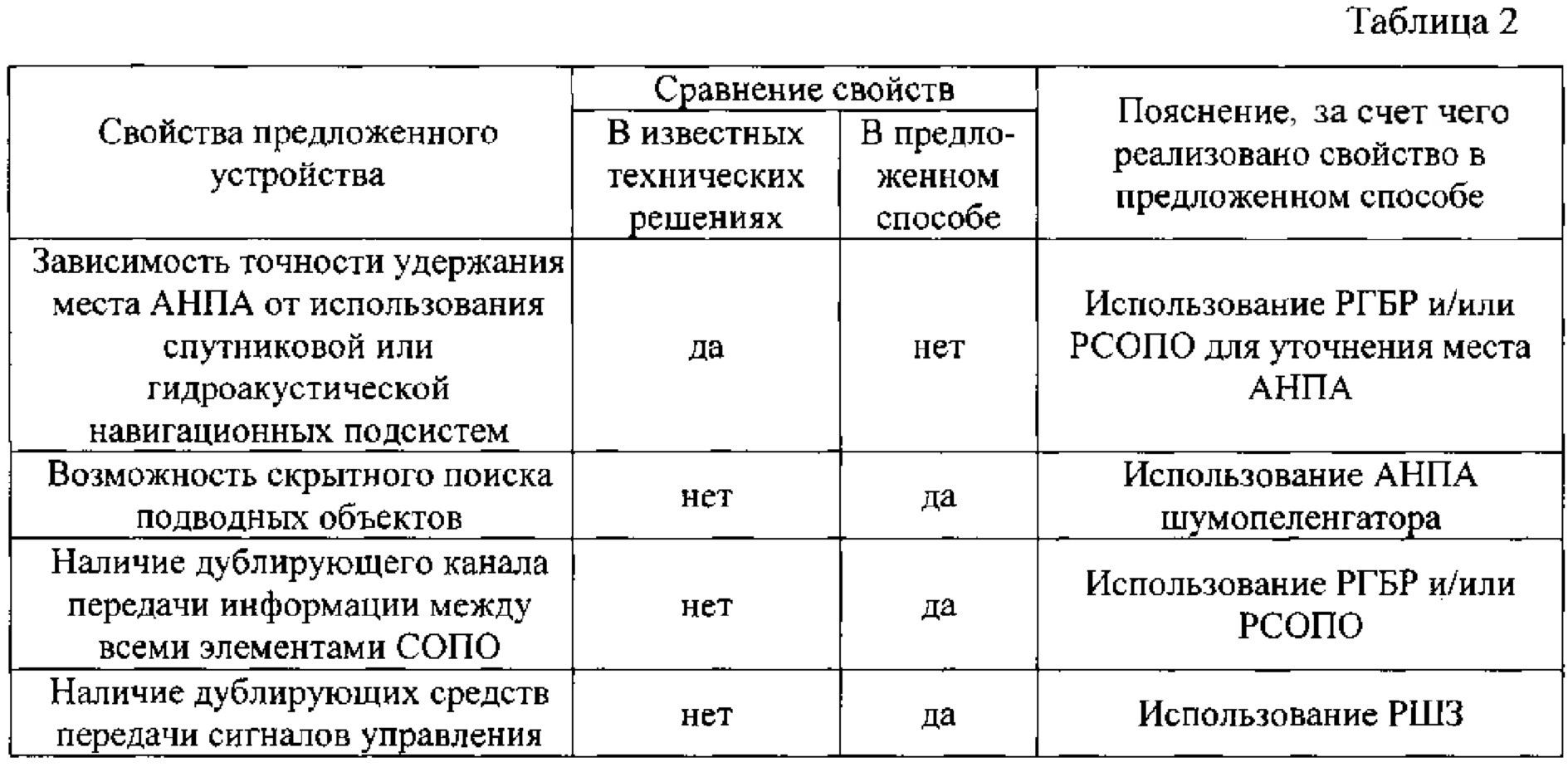

Таким образом, предлагаемая система освещения подводной обстановки способна обеспечить требуемую точность местоположения АНПА, когда в районе поиска не функционируют системы спутниковой и гидроакустической навигации, а также необходимое время наблюдения за обнаруженным подводным объектом при его попытке оторваться от наблюдения.
Система освещения подводной обстановки (СОПО), состоящая из пункта управления - надводного корабля и/или берегового поста, автономного необитаемого подводного аппарата (АНПА), канала управления и связи пункта управления с АНПА с приемо-передающими устройствами подсистемы звукоподводной связи, канала контроля подводного объекта гидролокатором АНПА, отличающаяся тем, что дополнительно в состав СОПО включаются радиогидроакустический буй реактивный (РГБР), и/или реактивный шифровой заряд (РШЗ), и/или реактивная система освещения подводной обстановки (РСОПО), канал контроля АНПА и подводного объекта посредством РГБР и/или РСОПО, канал управления и связи пункта управления с АНПА через РГБР, и/или РСОПО, и/или РШЗ, на АНПА дополнительно устанавливаются в канале контроля подводного объекта шумопеленгатор и в подсистеме звукоподводной связи акустический модем и устройство расшифровки сигналов шифрового заряда, на пункте управления устанавливаются пусковая установка для хранения и пуска АНПА, пусковая установка для хранения и пуска РГБР и/или РСОПО, вычислительное и сигнальное устройства, в подсистеме звукоподводной связи акустический модем.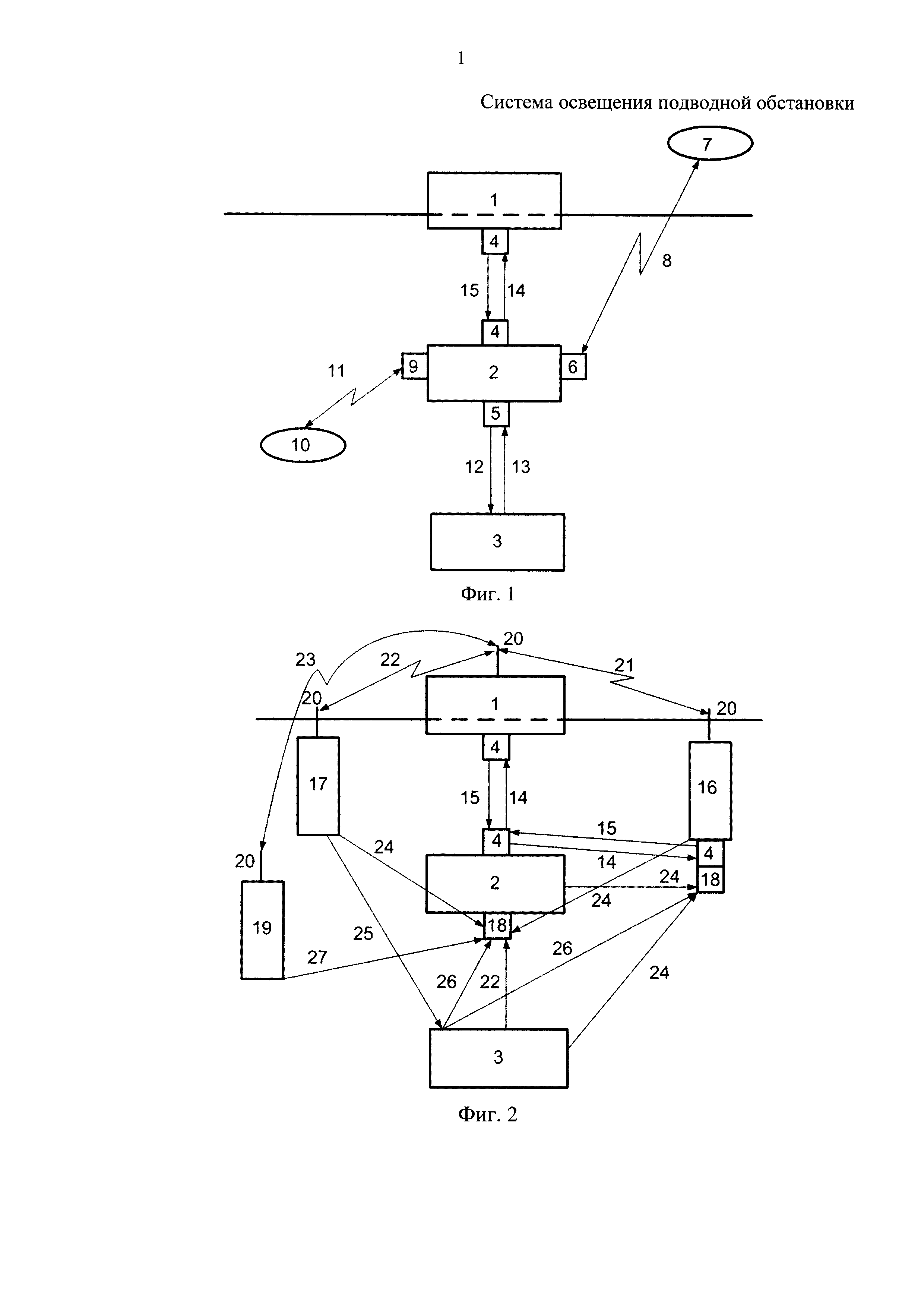
Способ изготовления секций трехслойной конструкции из полимерных композиционных материалов
Способ комбинированной выработки механической, тепловой энергии и получения твердого диоксида углерода
Эпоксидная композиция для адгезионного слоя и армирующий наполнитель на его основе
Устройство защиты от разрушения опорных зон опытных образцов из полимерных композиционных материалов при их статических испытаниях на сжатие
Способ ремонта диффузионного отделителя водорода
Мобильный гидроакустический буй-маяк и способ навигационного оборудования морского района
Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления
Самоходный гидроакустический буй-маяк и способ навигационного оборудования морского района
Способ поражения подводной лодки
Крылатая ракета с автономным необитаемым подводным аппаратом-миной
Подводный аппарат с сетевым тралом
Способ обнаружения и поражения подводной цели
Авиационный объемно-детонирующий снаряд
Способ навигационного ориентирования подводного плавсредства по трассе подводного кабеля или трубопровода
Авиационный радиогидроакустический буй-планёр

