Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ СУДОВЫМ ДВИЖИТЕЛЕМ
Вид РИД
Изобретение
Изобретение относится к области судостроения и может быть использовано в системах управления судовыми движителями различного класса: водометными, винтами регулируемого шага, подруливающими устройствами и др.
Известна система управления судовым движителем, содержащая задающее устройство, к выходу которого подключен один из входов блока сравнения, своим выходом соединенного с входами основных усилителей с большим коэффициентом усиления и большей чувствительностью и входами дополнительных усилителей с коэффициентами усиления, меньшими, чем у основных, к которым подключены электромагниты золотника постоянного расхода рабочей жидкости и электромагниты дополнительного золотника с большим или равным, чем у основного золотника, проходным сечением и расходом. Золотники соединены своими выходами с исполнительным механизмом движителя, своим выходом соединенного с входом датчика обратной связи, который своим входом соединен со вторым входом блока сравнения (см. авторское свидетельство СССР №1634569, МКИ В63Н 3/10, 25/30, 21/22, 1989 г.). Недостатком такой системы управления является невозможность плавного регулирования скорости изменения заданного угла поворота движителя, что приводит к тому, что при определенных углах поворота движителя приводной двигатель перегружается, а это ведет к необходимости изменения угла поворота на противоположный до полного снятия перегрузки приводного двигателя. Все это приводит к задержкам в управлении судном.
Наиболее близким к заявляемому изобретению по технической сущности и достигаемому результату является система управления судовым движителем, содержащая задающее устройство, выход которого соединен с одним из входов блока сравнения, подключенного к входу по крайней мере одного усилителя, выход которого соединен с электроприводом золотника, сообщенного с входом исполнительного механизма движителя, датчик обратной связи, соединенный с другим входом блока сравнения, и соединенное с выходом блока сравнения устройство изменения скорости подачи рабочей жидкости, направляемой в исполнительный механизм движителя (см. патент РФ №2458818, МКИ В63Н 3/10, 21/22, 2012 г.). Недостатком данного технического решения является повышенные энергозатраты на осуществление управления судовым движителем и недостаточный КПД судового движителя. Дело в том, что в процессе стационарного движения судна, когда нет необходимости управлять движителем (например, изменять шаг лопастей гребного винта), приводной двигатель в устройстве изменения скорости подачи рабочей жидкости работает на полной нагрузке, потребляя повышенные энергоресурсы.
Целью данного изобретения является повышение КПД судового движителя и снижение энергозатрат.
Данная цель достигается тем, что в известной системе управления судовым движителем, содержащей задающее устройство, выход которого соединен с одним из входов блока сравнения, подключенного к входу по крайней мере одного усилителя, выход которого соединен с электроприводом золотника, сообщенного с входом исполнительного механизма движителя, датчик обратной связи, соединенный с другим входом блока сравнения, и соединенное с выходом блока сравнения устройство изменения скорости подачи рабочей жидкости, направляемой в исполнительный механизм движителя, в нем устройство изменения скорости подачи рабочей жидкости выполнено в виде асинхронного электродвигателя, соединенного с частотным преобразователем и гидравлическим насосом и дополнительно соединено с движителем судна, а в качестве гидравлического насоса использован аксиально-поршневой насос.
Выполнение устройства изменения скорости подачи рабочей жидкости в виде асинхронного электродвигателя, соединенного с частотным преобразователем и гидравлическим насосом, позволяет устранить влияние реактивной мощности на электросеть и уменьшить величину полной мощности. Как правило, более 90% времени работы движителя осуществляется при 10% нагрузке насосного агрегата. При этом приводной электродвигатель системы управления все время работает на номинальной частоте. Введение частотного преобразователя в совокупности с асинхронным электродвигателем позволяет ему при 10% нагрузке на валу этого двигателя работать при частоте в 3 раза меньше номинальной и в соответствии с законом регулирования U/f при 3-кратном уменьшении напряжения, что обеспечивает 3-кратное повышение коэффициента мощности и уменьшение величины полной мощности. Наличие насосного агрегата в системе управления можно использовать и для смазывания судового движителя, так как в качестве рабочей жидкости в большинстве случаев используется масло, применяемое для смазки движителя. В этом случае вводится связь между устройством изменения скорости подачи рабочей жидкости с судовым движителем. Применение в этом устройстве аксиально-поршневого гидронасоса обеспечивает повышенную точность регулирования подачи рабочей жидкости и КПД за счет значительно более точной зависимости подачи насосом рабочей жидкости от скорости вращения вала асинхронного электродвигателя с частотным преобразователем у многопоршневых насосов, каким является аксиально-поршневой насос, по сравнению с насосами других типов.
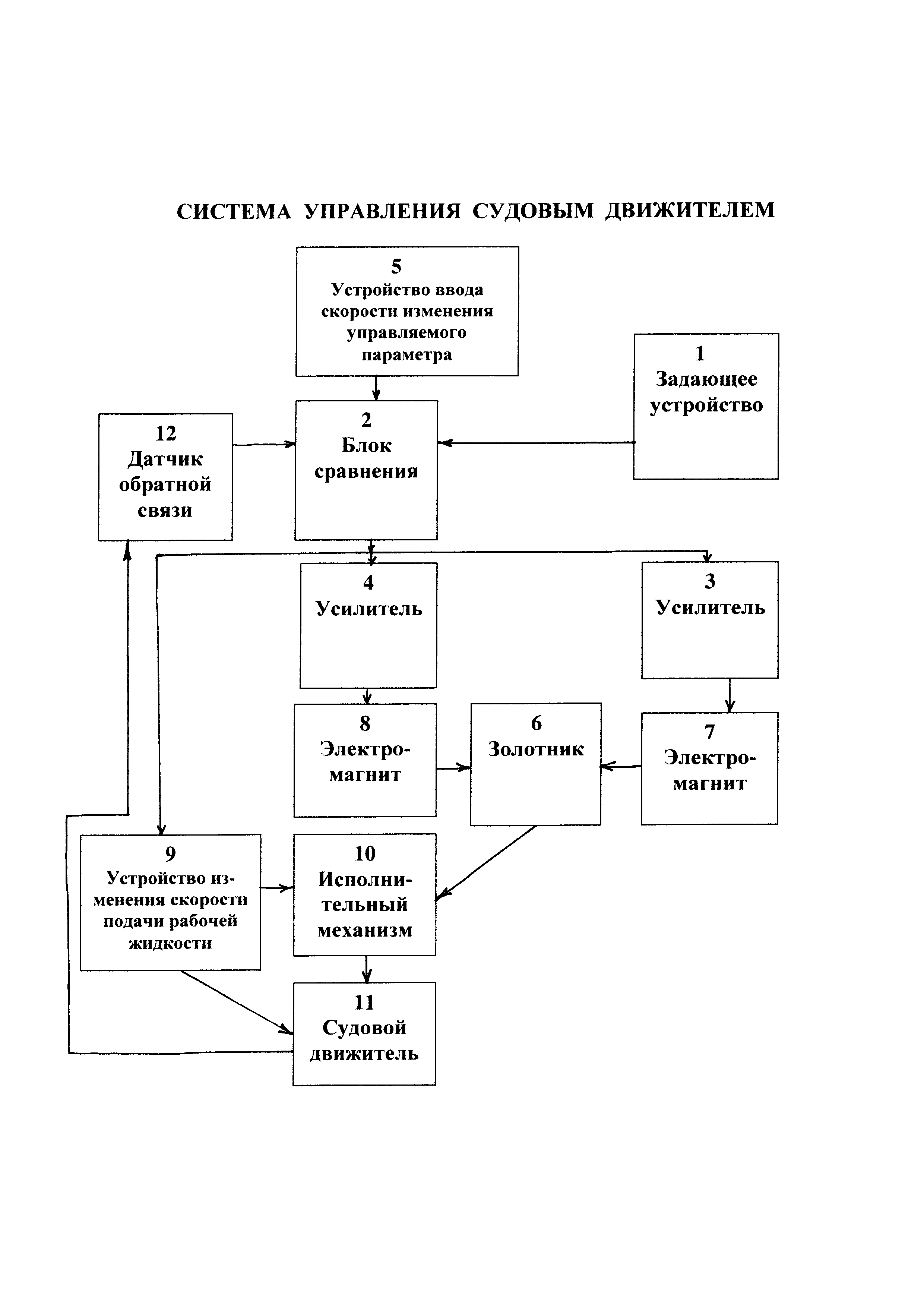
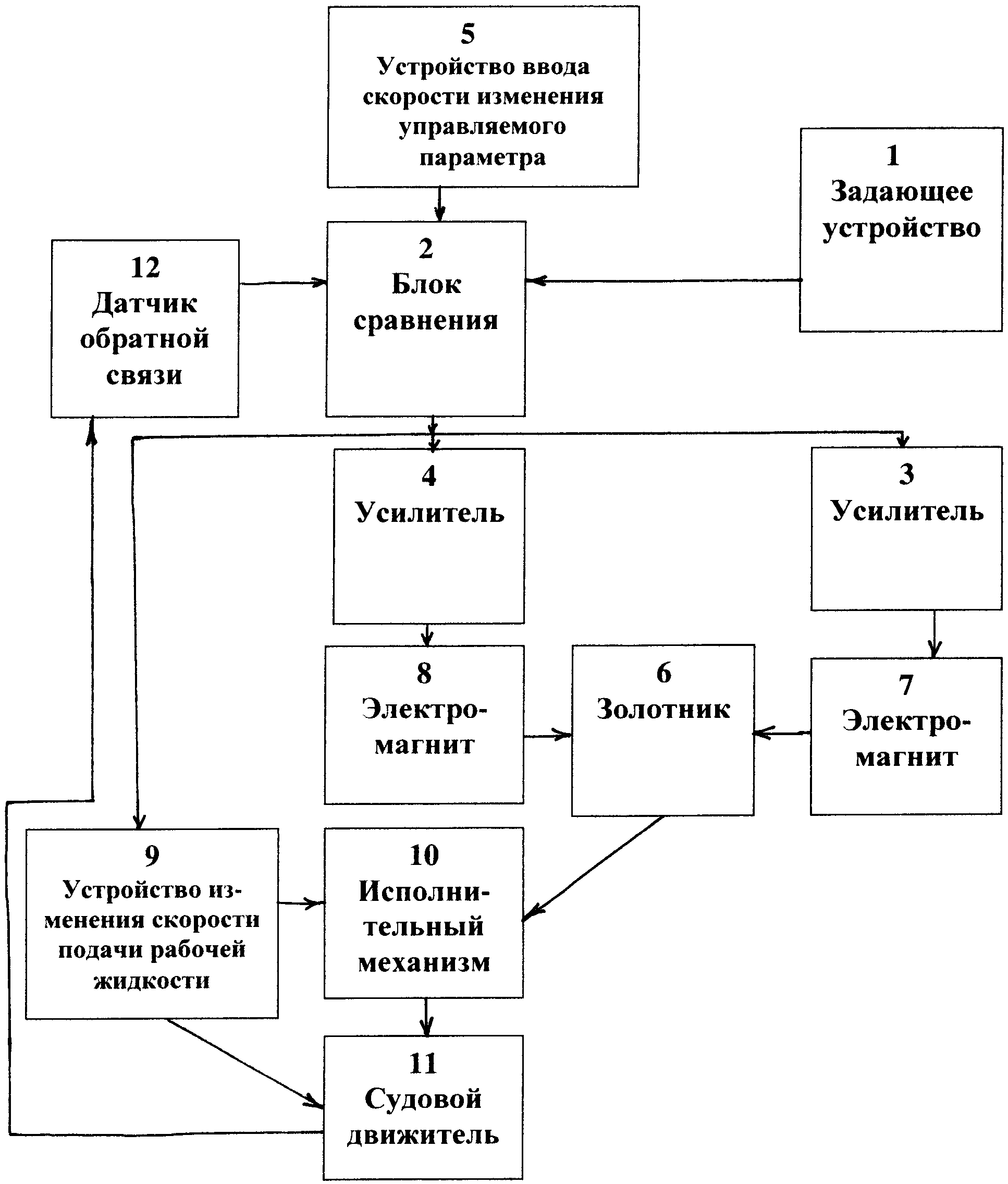
На фигуре показана блок-схема предлагаемой системы регулирования судового движителя со следующими обозначениями:
1 - задающее устройство;
2 - блок сравнения;
3, 4 - усилители;
5 - устройство ввода скорости изменения управляемого параметра;
6 - золотник;
7, 8 - электромагниты;
9 - устройство изменения скорости подачи рабочей жидкости;
10 - исполнительный механизм;
11 - судовой движитель.
Система управления судовым движителем содержит задающее устройство 1, к выходу которого подключен один из входов блока сравнения 2. Своим выходом соединенный с входами усилителей 3, 4, к выходам которых соответственно подключены электромагниты 7, 8 золотника 6, выход которого соединен с исполнительным механизмом 10. Выход блока сравнения 2 соединен также с входом устройства изменения скорости подачи рабочей жидкости 9, своим выходом соединенный с исполнительным механизмом 10, выход которого соединен с движителем 11. Выход движителя 11 соединен с входом датчика обратной связи 12, который своим выходом соединен со вторым входом блока сравнения 2, третий вход которого соединен с выходом устройства ввода скорости изменения управляемого параметра 5. Устройство изменения скорости подачи рабочей жидкости 9, выполненное в виде асинхронного электродвигателя, соединенного с частотным преобразователем и аксиально-поршневым гидравлическим насосом, связано с движителем 11.
Система управления судовым движителем работает следующим образом. При отклонении задающего устройства 1 на определенный угол блок сравнения 2 формирует сигнал соответственно вперед или назад, который поступает на вход усилителя 3 и 7 (вперед) или 4 и 8 (назад), и сигнал на устройство изменения скорости подачи рабочей жидкости 9 к частотному преобразователю, который изменяет обороты асинхронного электродвигателя гидронасоса. Рабочая жидкость подается в исполнительный механизм 10, подача которой в движитель 11 обеспечивается включением золотника 6 электромагнитами 7 (вперед) или 8 (назад). Тем самым обеспечивается управление движителем. При отсутствии необходимости управления судовым движителем нагрузка на гидравлический насос, входящий в устройство 9, снижается и не превышает 10% от номинальной нагрузки при управлении движителем. В этом случае с блока сравнения 2 на устройство 9 поступает сигнал и частотный преобразователь снижает частоту, поступающую на асинхронный электродвигатель, который в этом случае снижает свою мощность и потребление электроэнергии из сети. Устройство 9 дополнительно соединено с судовым движителем 11, обеспечивая не только управление судовым движителем, но и его смазку. Это также повышает КПД судового движителя, так как исключает введение в конструкцию этого движителя дополнительного насоса для его смазки.
Выполнение устройства изменения скорости подачи рабочей жидкости в виде асинхронного электродвигателя, соединенного с частотным преобразователем и гидравлическим насосом и дополнительно соединенного с судовым движителем, позволяет рационально использовать энергоресурсы и повышает КПД этого движителя.
Способ газолазерной резки крупногабаритных деталей из композиционных материалов и устройство для его осуществления
Полимерная композиция
Грунтовочная композиция
Способ адаптации рабочей части аэродинамической трубы для получения безындукционного обтекания моделей летательных аппаратов и устройство для его осуществления
Способ получения конъюгата нона-β-(1→3)-глюкозида с бычьим сывороточным альбумином скваратным методом
Износостойкий сплав на основе никеля для нанесения износо- и коррозионно-стойких покрытий на конструкционные элементы микроплазменным или сверхзвуковым газодинамическим напылением
Способ измерения температуры поверхности конструкции резистивным чувствительным элементом, устройство для его осуществления и способ изготовления устройства
Способ определения температурной характеристики резисторного чувствительного элемента, устройство для его осуществления и способ изготовления устройства
Устройство для измерения звукового давления
Устройство для измерения давления, температуры и теплового потока
Система управления движителем
Судовая винторулевая колонка

