Результат интеллектуальной деятельности: Способ определения целостности высокоточных навигационных определений в реальном времени
Вид РИД
Изобретение
Изобретение относится к области спутниковой навигации и может быть использовано в качестве оценки достоверности высокоточного навигационного определения в реальном времени.
Известен способ внутрисистемного мониторинга навигационных сигналов каждого спутника GPS (статья “Precise Point Positioningand Integrity Monitoring with GPS and GLONASS”, авторы: AlttiJokinen, ShaojunFeng, Carl Milner, Wolfgang Schuster and Washington Ochieng, URL: http://www.rin.org.uk/Uploadedpdfs/ConferenceProceedings/Jokinen%20paper%202A-web.pdf, который проводится в рамках решения задачи эфемеридно-временного обеспечения системы на основе беззапросных измерений контрольного сегмента GPS. Все оценки качества функционирования навигационного космического аппарата (НКА) делаются на основе измерений по Р-коду, поскольку считается, что поведение параметров сигнала в кодах Р и С/А идентично. Параметры С/А-кода контролируются лишь в течение краткого периода времени при восхождении НКА в секторе видимости станции.
Недостатком является большой период времени с момента определения неисправности НКА до момента оповещения потребителя, поскольку между моментом возникновения неисправности НКА и моментом установки признака «не здоров» в навигационном сообщении может пройти несколько часов.
В работе “GNSS navigation solution integrity in non-controlled environments” (US 8131463, приор. 26.02.2009) описан алгоритм оценки целостности навигационного определения для одиночного приемника, не использующего корректирующую информацию от какого-либо функционального дополнения глобальной навигационной спутниковой системы (ГНСС), и применяющего для определения местоположения метод наименьших квадратов.
В работе «Способ определения целостности высокоточных навигационных определений потребителя и система для его реализации» (патент на изобретение №2577846) описан способ определения целостности высокоточных относительных навигационных определений, использующий корректирующую информацию от локальной фазовой дифференциальной подсистемы и широкозонной дифференциальной подсистемы, не учитывающий точность формирования этой корректирующей информации и зависящий от наличия в рабочей зоне локальной дифференциальной подсистемы.
Техническим результатом заявленного изобретения является повышение достоверности высокоточных навигационных определений в реальном времени и уменьшение времени оповещения потребителя о нарушении целостности навигации.
Технический результат заявленного изобретения достигается тем, что способ определения целостности высокоточных навигационных определений в реальном времени заключается в том, что принимают при помощи антенно-фидерного устройства приемника первый радиосигнал всех видимых навигационных космических аппаратов глобальных навигационных спутниковых систем, содержащий навигационную информацию, формируют в блоке реализации режима высокоточной навигации вычислительного устройства приемника проекционную матрицу и ковариационную матрицу, проекционная матрица имеет вид:
 ,
,
где H – матрица частных производных  (направляющих косинусов) вектора оцениваемых параметров,
(направляющих косинусов) вектора оцениваемых параметров,
определяют в блоке реализации режима высокоточной навигации вычислительного устройства приемника с использованием фильтра Калмана высокоточное навигационное определение, определяют в блоке определения целостности навигационных определений вычислительного устройства приемника величины ошибок в горизонтальной плоскости и по вертикали, обусловленные текущими измерениями,
где P11, P22, P33 – элементы ковариационной матрицы ошибок,
производят в блоке определения целостности навигационных определений вычислительного устройства приемника учет неточности формирования корректирующей информации широкозонной дифференциальной системы, моделирования атмосферных погрешностей, погрешностей, вызванных многолучевостью, на основе полученных оценок определяют в блоке определения целостности навигационных определений вычислительного устройства приемника горизонтальный и вертикальный уровни защиты,
где AH- коэффициент проекции ошибок в горизонтальной плоскости; AV – коэффициент проекции ошибок в вертикальной плоскости.


где HPLВНО – радиус круга в горизонтальной плоскости с центром в точке реального положения потребителя;
VPLВНО – половина длины отрезка в вертикальном направлении с центром в точке реального положения потребителя;
KH – фактор, отражающий доверительный диапазон в плоскости;
KV – фактор, отражающий доверительный диапазон по высоте;
Sbias - точность формирования коррекций ЧВП и орбиты НКА,
определяют в блоке определения целостности навигационных определений вычислительного устройства приемника целостность высокоточного навигационного определения путем сравнения с заданными аварийными пределами по горизонтали и вертикали, после сообщают с помощью устройства отображения информации приемника полученный из вычислительного устройства приемника результат и параметры целостности высокоточных навигационных определений, принимают при помощи антенно-фидерного устройства второй радиосигнал, хотя бы от одного многофункционального космического аппарата, содержащий корректирующую навигационную информацию широкозонной дифференциальной системы (ШДС) и точность формирования данной информации в формате RTCM 3.2, либо принимают радиосигнал с аналогичной корректирующей информацией от центра обработки данных (ЦОД) ШДС по каналам сети Internet при помощи антенно-фидерного устройства и устройства приема корректирующей информации, далее используя первый радиосигнал формируют в радиочастотной части приемника измерения первичных радионавигационных параметров (псевдодальности и псевдофазы), подают первый и второй радиосигналы в вычислительное устройство приемника, далее в блоке формирования массива скорректированных измерений вычислительного устройства приемника формируют линейные безионосферные комбинации первичных радионавигационных параметров:

где PIF - линейная безионосферная комбинация измерений псевдодальности; ФIF – линейная безионосферная комбинация измерений псевдофазы; Pi, Pj – измерения псевдодальности на частотах i и j; Фi, Фj – измерения псевдофазы на частотах i и j; Сi, Сj – частотные коэффициенты:
формируют в блоке реализации режима высокоточной навигации вычислительного устройства приемника ковариационную матрицу с использованием первого и второго радиосигналов, ковариационная матрица ошибок измерений имеет вид:
где RP,IF - подматрица ошибок измерений псевдодальности; RФ,IF – подматрица ошибок измерений псевдофазы.
Сущность и признаки заявленного изобретения в дальнейшем поясняются чертежами, где показано следующее:
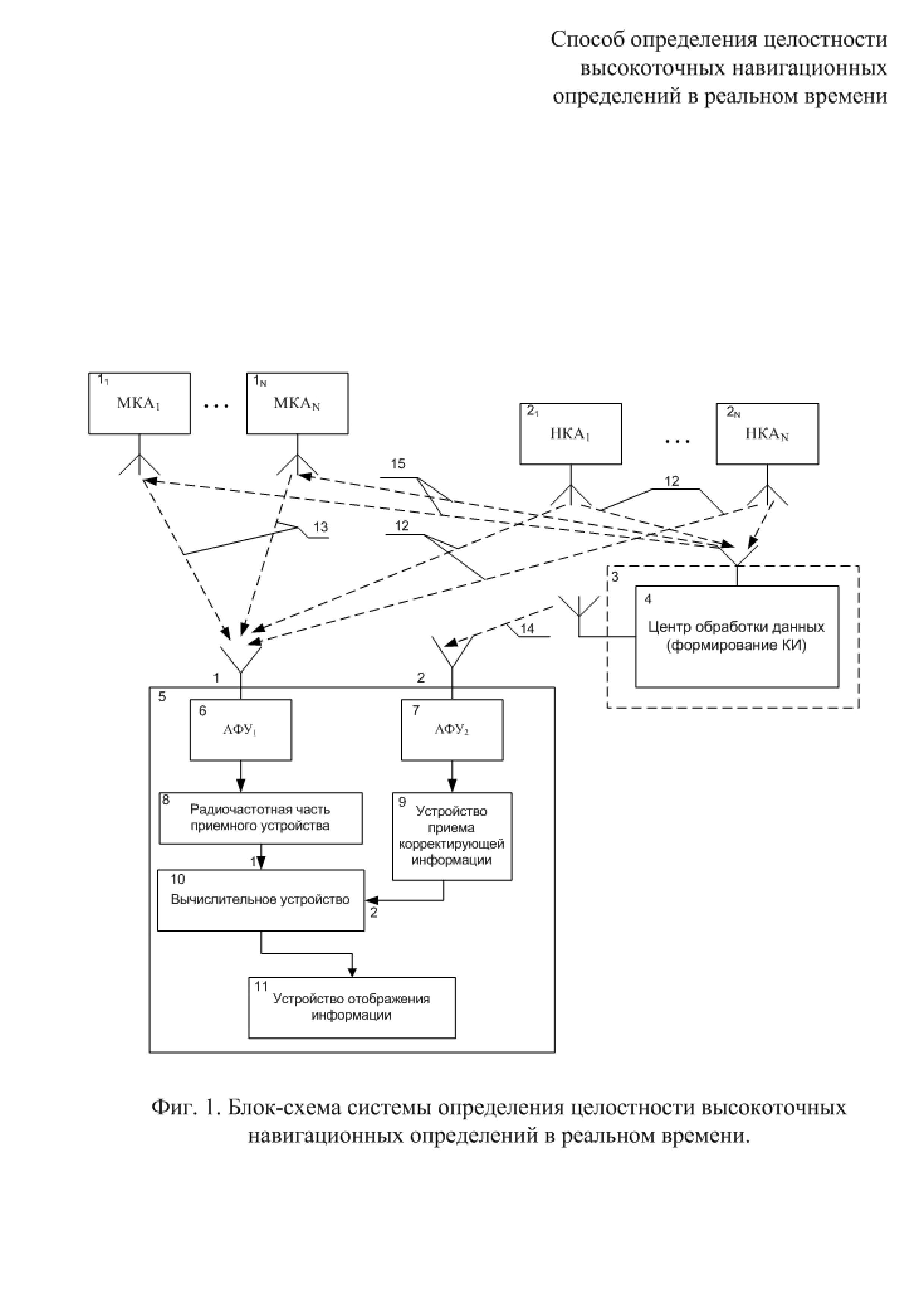
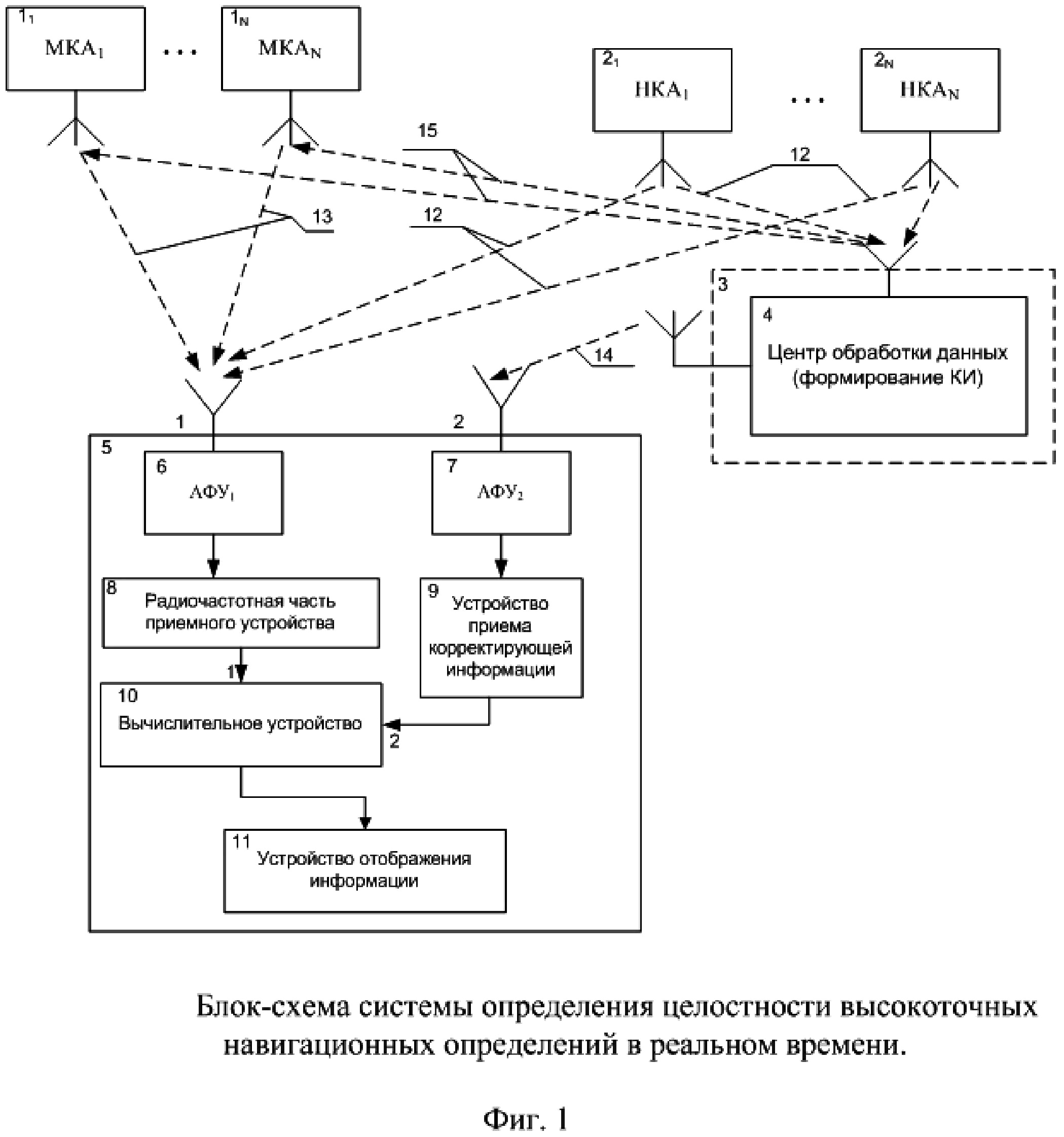
на фиг. 1 – блок-схема системы определения целостности высокоточных навигационных определений, где:
1…1N – многофункциональный космический аппарат;
2…2N – навигационный космический аппарат глобальной навигационной спутниковой системы;
3 – широкозонная дифференциальная система;
4 – центр обработки данных ШДС;
5 – приемное устройство;
6 – первое антенно-фидерное устройство;
7 – второе антенно-фидерное устройство;
8 – радиочастотная часть;
9 – устройство приема корректирующей информации;
10 – вычислительное устройство;
11 – устройство отображение информации;
12 – первый радиосигнал от НКА;
13 – второй радиосигнал от МКА с излучаемой широкозонной корректирующей информацией;
14 – второй радиосигнал с излучаемой широкозонной корректирующей информацией по сети Internet;
15 – радиосигнал закладывающий корректирующую информацию от ШДС на МКА;
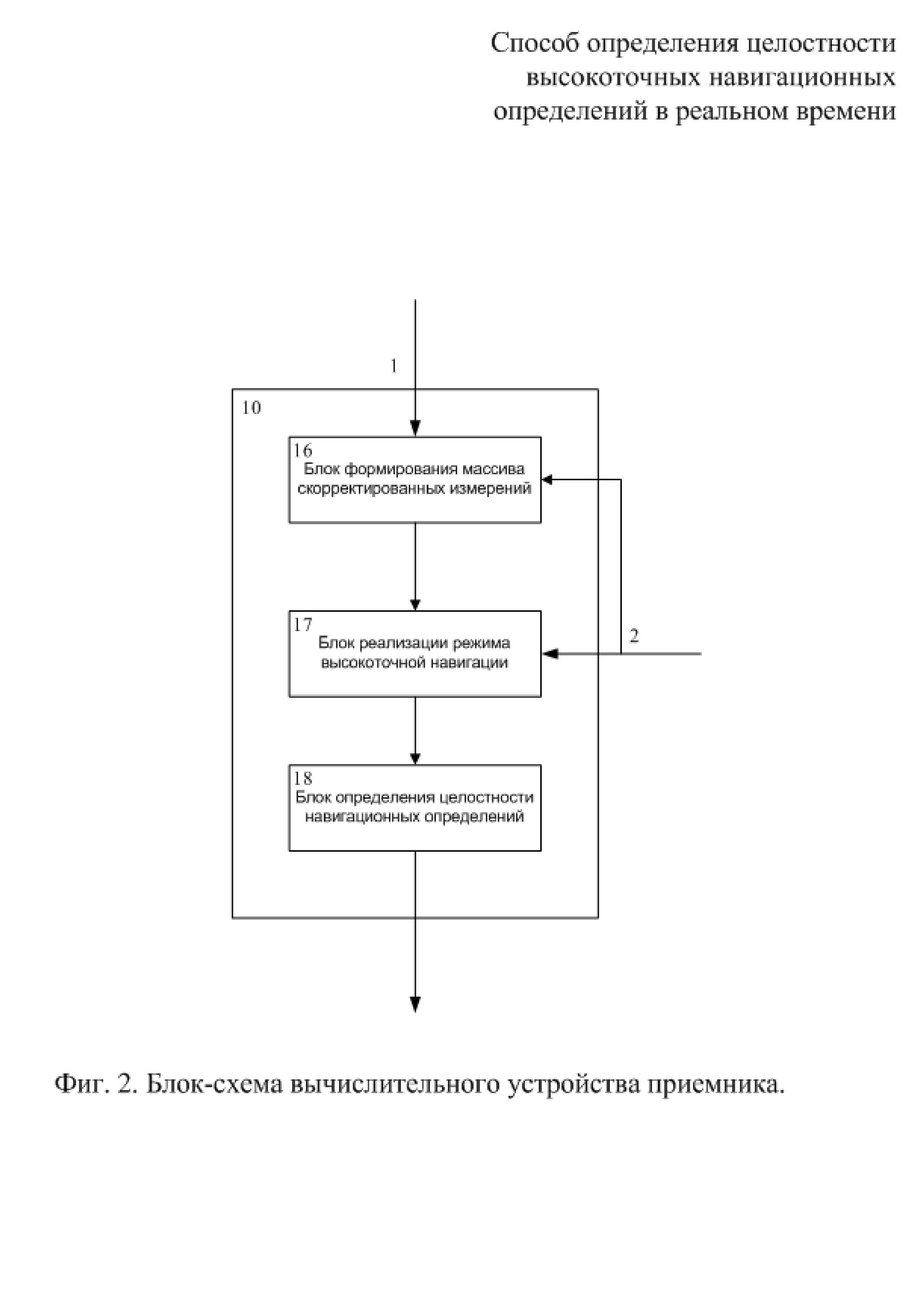
на фиг. 2 – блок-схема вычислительного устройства приемника, где:
10 – вычислительное устройство;
16 – блок формирования массива скорректированных измерений;
17 – блок реализации режима высокоточной навигации;
18 – блок определения целостности навигационных определений;
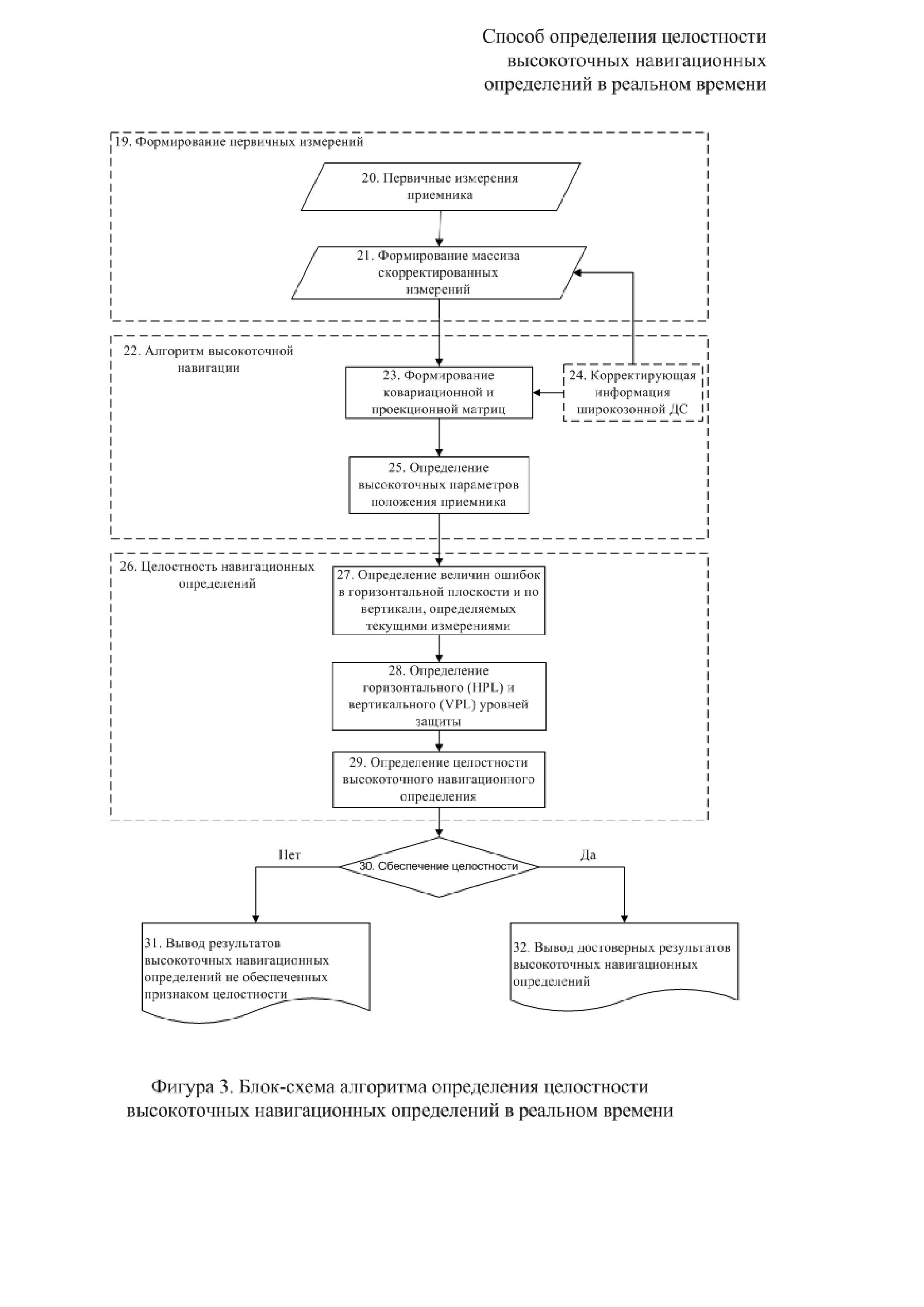
на фиг. 3 – блок-схема алгоритма определения целостности высокоточных навигационных определений, где:
19 – формирование скорректированных измерений;
20 – первичные измерения приемника;
21 – формирование массива скорректированных измерений;
22 – алгоритм высокоточной навигации;
23 – формирование ковариационной и проекционной матриц;
24 – корректирующая информация широкозонной ДС;
25 – определение высокоточных параметров положения приемника;
26 – целостность навигационных определений;
27 – определение величин ошибок в горизонтальной плоскости и по вертикали, определяемых текущими измерениями;
28 – определение горизонтального (HPL) и вертикального (VPL) уровней защиты;
29 – определение целостности высокоточного навигационного определения;
30 – верификация целостности;
31 – вывод результатов высокоточных навигационных определений не обеспеченных признаком целостности;
32 – вывод достоверных результатов высокоточных навигационных определений;
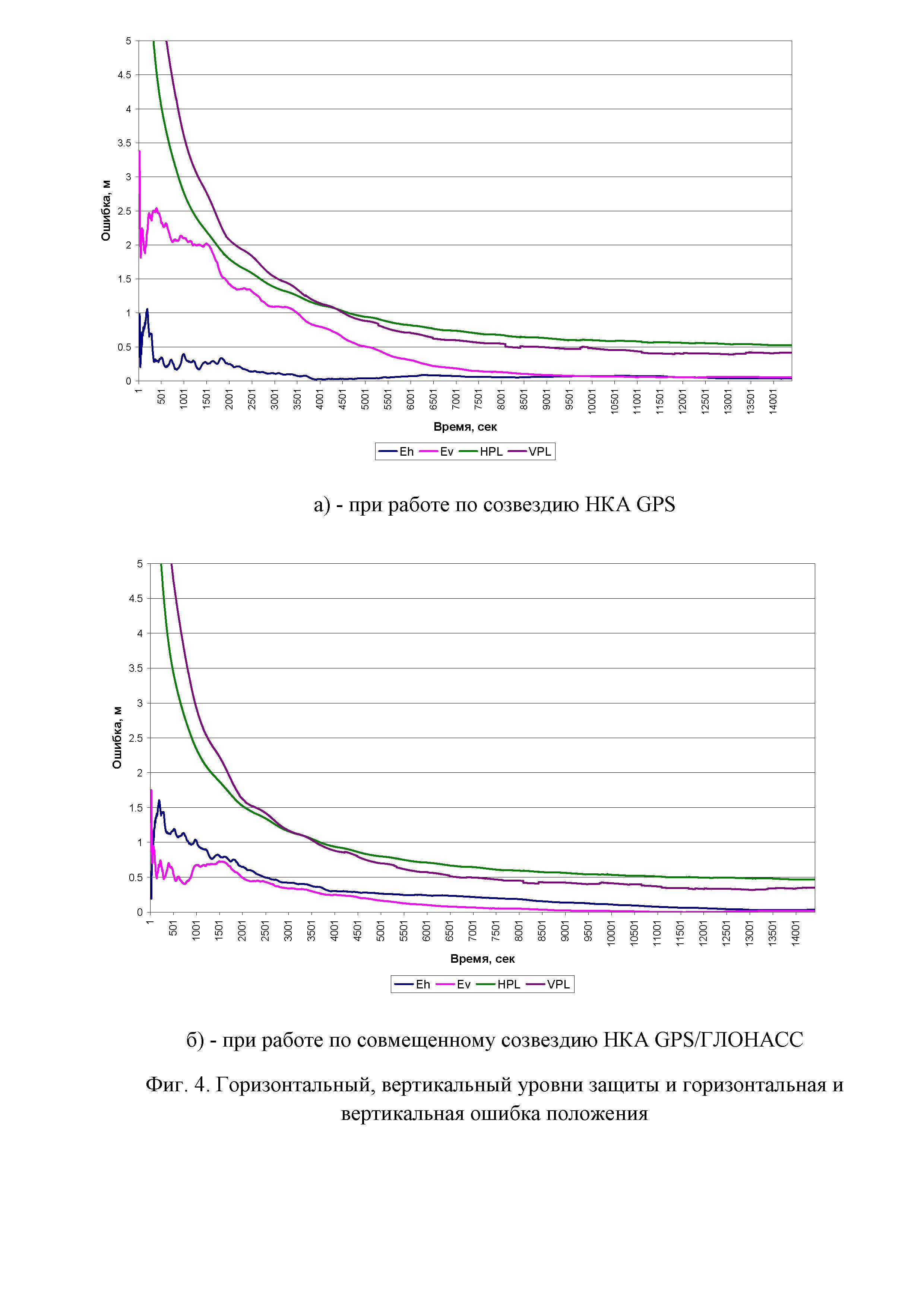
на фиг. 4 – горизонтальный, вертикальный уровни защиты и горизонтальная и вертикальная ошибка;
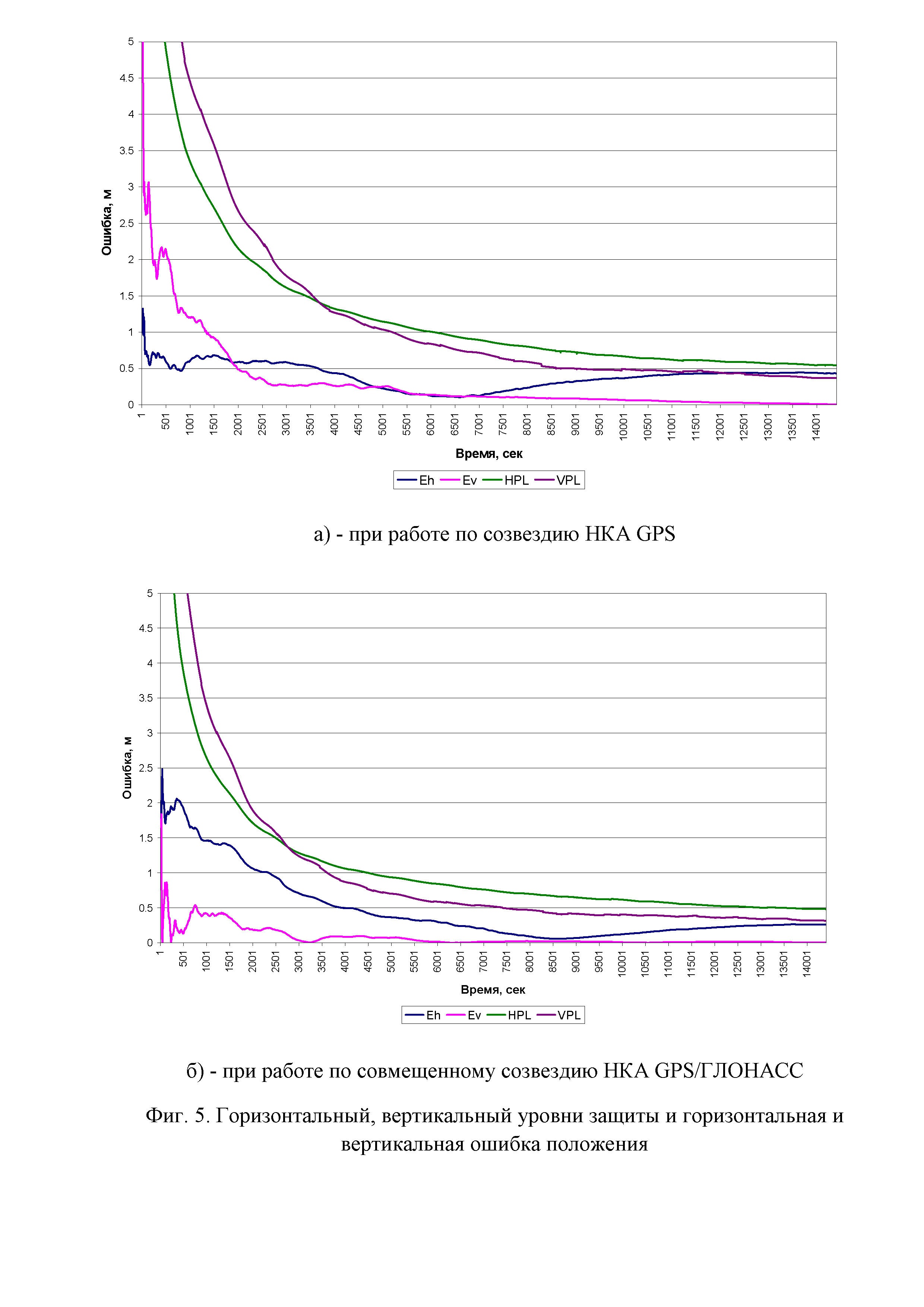
на фиг. 5 – горизонтальный, вертикальный уровни защиты и горизонтальная и вертикальная ошибка.
Решение задачи навигации потребителя на основе измерений нарастающего объема (фильтра Калмана) позволяет найти оценку вектора положения потребителя с учетом всех проведенных ранее измерений, что уменьшает влияние аномальных ошибок измерений на результат решения задачи местоопределения. При описании модели движения объекта используют линеаризацию в окрестности текущего фазового вектора потребителя Хk. Переходная матрица линейной модели движения объекта есть Ф.
Априорные оценки вектора потребителя (X) и ковариационной матрицы ошибки определения вектора потребителя (P) обозначены верхним индексом "-", а апостериорные оценки – индексом "+".
Процедура применения фильтра Калмана на каждом шаге измерений k (k=0,1,2,…) имеет следующий вид:
• Вычисляется ожидаемый вектор измерений
 (1)
(1)
• Вычисляется матрица измерений
 (2)
(2)
• Вычисляется матрица обратной связи Kkпри помощи уравнения:
 (3)
(3)
• Определяется апостериорная оценка фазового вектора потребителя:
 (4)
(4)
• Определяется апостериорная ковариационная матрица ошибки определения фазового вектора потребителя:
 (5)
(5)
здесь I – единичная матрица
• Вычисляется априорная оценка ковариационной матрицы на следующем k+1 шаге:
 (6)
(6)
здесь  – ковариационная матрица возмущений
– ковариационная матрица возмущений
• Вычисляется фазовый вектор потребителя на следующем k+1 шаге:
 (7)
(7)
В режиме высокоточной навигации по сигналам НКА ГНСС (21…2N), принимаемых антенно-фидерным устройством (6) приемника (5) в радиочастотной части (8) приемника (5) осуществляется формирование измерений первичных радионавигационных параметров (псевдодальности и псевдофазы) (см. фиг. 1). Антенно-фидерным устройством (6) приемника (5) осуществляется прием сигналов от многофункциональных космических аппаратов (11…1N) с коррекциями спутниковых часов и орбиты НКА ГНСС (либо при помощи антенно-фидерного устройства (7) и устройства приема корректирующей информации (9) по сети Internet от ЦОД ШДС). По измерениям от навигационных космических аппаратов (21…2N) наблюдаемых на приемнике (5) в вычислительном устройстве (10) формируется вектор измеренных параметров, который представим в виде:
 (8)
(8)
где PIF- линейная безионосферная комбинация измерений псевдодальности; ФIF– линейная безионосферная комбинация измерений псевдофазы.
Ковариационная матрица ошибок измерений имеет вид:
(9)
где RP,IF- подматрица ошибок измерений псевдодальности; RФ,IF – подматрица ошибок измерений псевдофазы.
В общем виде вектор оцениваемых параметров для высокоточной навигации имеет вид:
 (10)
(10)
где xT - координаты определяемого пункта; T – сдвиг шкалы времени приемника; ZTD – зенитная тропосферная задержка; GN и GE – северныя и восточные компоненты градиента тропосферной задержки; BIF – остаточная поправка безионосферной комбинации измерений псевдофазы.
В случае одночастотной аппаратуры потребителя для компенсации ионосферной погрешности измерений необходимо передавать в составе корректирующей информации ионосферную сетку с параметрами задержек и характеристики точности формирования параметров задержки, добавив в формат RTCM 3.2 соответствующие сообщения.
В заявленном способе определения целостности для высокоточной навигации потребителя предлагается использовать параметры для оценки характеристик точности навигации потребителя для широкозонных функциональных дополнений ГНСС (горизонтальный и вертикальный уровени защиты):
• HPLВНО – радиус круга в горизонтальной плоскости с центром в точке реального положения потребителя.
• VPLВНО – половина длины отрезка в вертикальном направлении с центром в точке реального положения потребителя.
Применение данных оценок характеристик точности дает возможность получить количественную оценку качества навигационного определения и отобразить потребителю с помощью устройства отображения информации (11). Величины ошибок определения положения потребителя в горизонтальной плоскости и по вертикали вычисляются на основе коэффициентов ковариационной матрицы ошибок определения вектора положения:
(11)
(12)
где P11, P22, P33 – элементы ковариационной матрицы ошибок (5).
Расчет HPLВНО и VPLВНО проводится по следующим формулам:
 (13)
(13)
 (14)
(14)
где KH – фактор, отражающий доверительный диапазон в плоскости;
KV – фактор, отражающий доверительный диапазон по высоте.
Проблемы с вычислением горизонтального и вертикального уровней защиты появляются, особенно в статических случаях, когда оценка положения в фильтре Калмана сходится к некоторой очень маленькой величине. Поэтому невозможно использовать эти данные, чтобы вычислить реалистичные уровни защиты. Уровни защиты, рассчитанные заявленным способом, описывают только, какая величина ошибки положения может быть вызвана текущими измерениями, но эти уровни защиты не сообщают пользователю о полных ошибках положения. Присутствующие при спутниковой навигации тропосферная, ионосферная погрешности, а также эффект многолучевости не могут быть смоделированы или исправлены полностью. Кроме того, ошибки в коррекциях спутниковых часов и коррекциях орбиты корректирующей информации от широкозонного функционального дополнения могут оказывать шумовое воздействие на измерения навигационных параметров.
Вышеперечисленные положения должны быть приняты во внимание при вычислении реалистичных уровней защиты. Для обеспечения вероятности правильного определения положения потребителя ~ 99,9% величины факторов, отражающих доверительный диапазон в плоскости (KH) и по высоте (KV), принимаем равными 6.
В заявленном способе определения целостности для высокоточной навигации потребителя проекционная матрица имеет вид:
(15)
Тогда коэффициенты проекции ошибок в горизонтальной области (AH)и по вертикали (AV) рассчитываются по следующим формулам:
(16)
(17)
Горизонтальный и вертикальный уровни защиты для режима высокоточной навигации, с учетом качества измерений и точности формирования коррекций частотно-временных параметров (ЧВП) и орбиты НКА в широкозонных функциональных дополнениях, рассчитываются по следующим формулам:
(18)
(19)
где Sbias - точность формирования коррекций ЧВП и орбиты НКА.
После вычисления горизонтального и вертикального уровней защиты их сравнивают с заданным аварийным пределом и принимают решение о целостности высокоточного навигационного определения.
Экспериментальная оценка определения целостности навигационных определений проводилась для различного состава визируемого созвездия НКА. При обработке экспериментальных данных использовался алгоритм высокоточной навигации с использованием широкозонной корректирующей информации: коррекции часов и орбит НКА, данные о точности формирования данных коррекций, данные о пригодности НКА для выполнения целевой задачи. Определение параметров HPL и VPL проводилось по заявленному способу определения целостности при высокоточной навигации потребителя. При расчете HPL и VPL использовались следующие значения параметров: Sbias = 10см; KH = KV=6. Ошибки определения положения в плоскости (Eh) и по высоте (Ev) оценивались относительно известных априорных координат пункта.
Эксперимент проводился для созвездия НКА GPS и совмещенного созвездия НКА ГЛОНАСС/GPS (фиг.4). Для подтверждения повторяемости результатов экспериментальной отработки разработанной методики определения целостности высокоточных навигационных определений в реальном времени был проведен аналогичный эксперимент в другие сутки (фиг.5).
Проведенные экспериментальные оценки заявленного способа и системы определения целостности высокоточных навигационных определений в реальном времени показывают, что расчет уровней защиты в плоскости и по высоте отражает реальную картину распределения ошибки навигационных определений.




Глобальная многофункциональная инфокоммуникационная спутниковая система
Устройство защиты полупроводниковых микросборок от тиристорного эффекта
Архитектура абонентского терминала сети персональной спутниковой связи
Способ расширения полосы навигационных сигналов глонасс с помощью меандровой поднесущей модуляции
Система моделирования ситуаций, относящихся к конфликтам и/или конкуренции
Способ и устройство контроля ведения промысловых работ с использованием трала при осуществлении мониторинга судов рыбопромыслового флота
Способ идентификации ионосферных предвестников землетрясений по данным зондовых спутниковых измерений
Способ и система блокирования несанкционированного канала передачи информации от радиопередатчика земного базирования на космический аппарат
Способ обработки термовидеоинформации на борту космического аппарата и её отображения на наземной станции
Национальная сеть высокоточного спутникового позиционирования
Способ изготовления сквозных металлизированных микроотверстий в кремниевой подложке
Способ обработки термовидеоинформации и решающее устройство для определения температуры объекта при осуществлении способа
Способ определения повышенной сейсмической активности
Способ мониторинга окружающей среды и беспилотный аппарат для использования в данном способе
Способ формирования сигнала спутниковой навигационной системы
Система оценки устойчивости спутниковой системы позиционирования, например системы глонасс, к неблагоприятным внешним воздействиям

