Результат интеллектуальной деятельности: Устройство для измерений мгновенных угловых перемещений качающейся платформы
Вид РИД
Изобретение
Предлагаемое устройство относится к области измерительной техники.
Для испытаний высокоточных инерциальных приборов широко применяются качающиеся платформы, которые, в свою очередь, подлежат аттестации. Большинство методик аттестации таких платформ, из-за принципов работы используемых датчиков угла, основаны на измерении угла поворота вала платформы. Однако, в связи с необходимостью установки испытуемого прибора в любой части платформы и не абсолютной жесткостью платформы, возникает задача измерений угла поворота качающейся платформы в точке расположения прибора.
Известны многочисленные прецизионные оптические датчики угла, так называемые энкодеры, использующие кодовое и растровое преобразования.
Примерами подобных устройств являются:
1) оптические угловые энкодеры (Renishaw pic, Великобритания, характеристики приведены на вэб-сайте http://www.renishaw.ru);
2) датчики для измерения угловых перемещений (DR. JOHANNES Heidenhain GmbH, Германия, характеристики приведены на вэб-сайте http://www.heidenhain.ru);
3) угловые преобразователи перемещений и угловые датчики положения (ОАО «СКБ ИС», Россия, характеристики приведены на вэб-сайте http://www.skbis.ru);
4) устройство для измерения плоского угла (Ю.Е. Дукаревич, М.Ю. Дукаревич, Ю.М. Иванов. Способ измерения плоского угла и устройство для его реализации // Патент РФ №2451903);
5) измеритель угла (А.Н. Королев, А.Я. Лукин, Г.С. Полищук, Измеритель угла // Патент на полезную модель РФ №109847);
6) устройство для воспроизведения угловой скорости (В.А. Грановский, М.Д. Кудрявцев, А.И. Рыскин, А.С. Щеулин. Устройство для воспроизведения угловой скорости (мера угловой скорости) // Патент РФ №2429490);
7) измеритель угловых скоростей и ускорений (Л.С. Привер. Оптико-электронный измеритель угловых скоростей и ускорений // Патент РФ №94042213).
Измерение угла в известных устройствах происходит следующим образом:
1) в энкодерах производства «Renishaw plc» и «DR. JOHANNES Heidenhain GmbH» определение угла происходит путем фотоэлектрического сканирования шкалы, которая представляет собой длинный штриховой код, или с помощью применения сверхбыстрой миниатюрной цифровой камеры, выполняющей снимки шкалы;
2) в энкодерах производства ОАО «СКБ ИС» определение угла основано на регистрации доли потока оптического излучения, прошедшего через сопряжение регулярного растра шкалы и растров окон анализатора, как координатной-периодической функции взаимного углового положения указанных растров;
3) в устройстве для измерения плоского угла (патент РФ №2451903) и измерителе угла (патент РФ №109847) плоский угол измеряется путем кодирования измерительного диапазона прибора с помощью оптической марки, устанавливаемой на роторе объекта, и формирования в плоскости регистрирующей ПЗС-матрицы изображений сигнальных меток, возникающих при прохождении света через кодовые отверстия марки;
4) в устройстве для воспроизведения угловой скорости (патент РФ №2429490) измерение мгновенного угла поворота стола осуществляется по круговой шкале, при формировании которой использовались углы между лучами веера.
Основными недостатками этих приборов являются:
- ограниченные точности измерений из-за влияния люфтов и вибраций;
- невозможность измерений угла в произвольной части платформы.
Наиболее близким по технической сущности и принятым за прототип устройством является устройство для измерения плоского угла (Патент РФ №2451903).
Прибор-прототип состоит из контрольного элемента, жестко закрепляемого на контролируемом объекте, измерительного блока и устройства обработки информации. Контрольный элемент содержит светодиод, точечную диафрагму, конденсатор и сигнальную маску, расположенную в фокальной плоскости объектива. Измерительный блок содержит объектив и приемную ПЗС-матрицу, сигнал с которой по высокоскоростному порту USB-2.0 поступает на устройство обработки информации - персональный компьютер (ПК). ПК производит необходимые вычислительные операции и формирует цифровой код измеряемого угла разворота контрольного элемента относительно измерительного блока. Контрольный элемент и измерительный блок устанавливаются соосно один по отношению к другому.
Прибор-прототип работает следующим образом.
Светодиод, точечная диафрагма и конденсатор формируют равномерный параллельный световой поток, который освещает сигнальную маску. Объектив контрольного элемента коллимирует сигнальный световой поток, прошедший через сигнальные щели маски, и направляет его на измерительный блок. Приемный объектив строит в своей фокальной плоскости изображение сигнальной маски, которое попадает на ПЗС-матрицу, установленную в плоскости изображения. С помощью ПЗС-матрицы оптическое изображение преобразуется в цифровой видеосигнал и поступает на ПК. В ПК с помощью специальных алгоритмов обработки информации производится вычисление угла поворота контрольного элемента относительно измерительного блока.
Существенным признаком прототипа является наличие двухотсчетной схемы кодирования измерительного диапазона прибора. Канал грубого отсчета представлен в виде одной сигнальной щели, расположенной в центральной зоне маски, а канал точного отсчета - в виде N сигнальных щелей (N>>1), расположенных в периферийной зоне маски.
Погрешность измерений оценивается авторами аналитически (причем упрощенно), а не определяется путем сравнения с эталоном. При этом целый ряд факторов, влияющих на точность измерений, в частности шумы квантования и дискретизации, параметры оптики, определяющие качество изображения контрольного элемента, остаются не учтенными.
Недостатками устройства-прототипа являются:
- качество системы «источник света - маска» существенно зависит от характеристик источника и стабильности этих характеристик в отношении температуры и напряжения питания, а также от стабильности взаимного пространственного положения источника света и маски, обусловленного материалами, из которых изготовлена контрольная часть;
- необходимость крепления устройства вблизи оси платформы (вследствие ограниченности размеров измерительного блока), что не позволяет измерять углы в произвольной части платформы.
Задача, которая решается предлагаемым изобретением, заключается в повышении точности и расширении функциональных возможностей устройства, а именно возможности его закрепления вне оси объекта и, следовательно, возможности наблюдения деформации платформы.
Технический результат: повышение точности измерения. Задача решается путем использования в составе предлагаемого устройства:
а) датчика - совокупности многозначных голографических мер плоского угла - голографических призм (далее - ГП) (Грановский В.А., Кудрявцев М.Д., Рыскин А.И., Щеулин А.С. Многозначная голографическая мера плоского угла // Патент РФ №2332638);
б) отсчетного устройства - фотоприемника.
Основой ГП служит кристалл с записанной в него системой наложенных голограмм, которые возбуждаются лучом референтного лазера и индуцируют веер дифрагированных лучей. Углы между дифрагированными лучами обладают стабильностью системы голограмм (Патент РФ №2332638), достаточной для обеспечения требуемого уровня точности предлагаемого устройства. Дифрагированные лучи могут быть расположены в плоскости с равномерным или неравномерным угловым шагом. По сути, они являются аналогами нормалей к боковым граням кварцевой призмы. В функциональном аспекте ГП рассматривается как подвижный многолучевой (многоотсчетный) оптический указатель специального вида, углы между лучами которого стабильны не хуже, чем углы между нормалями кварцевой призмы.
Датчик состоит из нескольких ГП, закрепленных на общем основании так, чтобы плоскости вееров были параллельны. Датчик устанавливают на платформе, ориентируя плоскости вееров указанных лучей перпендикулярно оси вращения. При повороте платформы лучи вееров перемещаются по фотоприемнику, который позволяет регистрировать это перемещение.
Ввиду сравнительно небольших массогабаритных характеристик датчик может крепиться с помощью струбцин и магнитов в любой части платформы, при условии, что плоскости вееров перпендикулярны оси вращения.
Фотоприемник неподвижен относительно оси вращения и выполняет функцию носителя шкалы, при формировании которой используются значения углов, хранимых ГП.
Таким образом, ГП выполняет две функции: носителя эталонных углов и датчика мгновенного угла поворота платформы.
Фотоприемник состоит из рядов последовательно расположенных ПЗС-линеек, размещенных на неподвижном основании, причем количество рядов не превышает числа ГП. В процессе измерений фотоприемник располагается параллельно оси вращения и, следовательно, перпендикулярно плоскостям вееров так, чтобы лучи вееров попадали в чувствительные зоны ПЗС-линеек. Для регистрации и визуального отображения реализованного угла поворота платформы служит персональный внешний компьютер (ПК), опрашивающий элементы фотоприемника. Также внешний ПК выполняет функцию обработки первичных сигналов указанных элементов - определение координатам центров зон засветки, формирование шкалы времени и ряд сервисных функций: настройку элементов фотоприемника и отображение их активности, функции запуска и остановки передачи первичных данных, выставление времени записи первичных данных в автоматическом режиме. Формирование шкалы времени происходит с помощью системных часов ПК, в отличие, например, от подхода, изложенного в патенте (RU 94042213), в котором шкала времени задается оптопарой и щелями в сканирующем диске. Все сервисные функции осуществляются путем задания необходимой команды в специальном программном обеспечении и передачи соответствующего сигнала на микропроцессор фотоприемника. Указанные сервисные функции не влияют на выполнение функций обработки сигналов и в конечном итоге на точность измерений.
Следует подчеркнуть два важных обстоятельства. Во-первых, устройство реализует потенциально самый точный из методов измерений - метод сравнения с мерой. Во-вторых, в силу многозначности использованной угловой меры, имеет место избыточность в измерениях углов указанным способом.
Возможность крепления датчика в разных частях платформы и неподвижность регистратора дают возможность по множеству зарегистрированных данных, относящихся к одному и тому же угловому положению платформы, и при разных локализациях датчика на платформе следить за деформацией платформы. Условием наблюдения деформации является превышение линейным параметром деформации погрешности датчика угла, установленного в оси платформы, и люфта оси платформы.
Таким образом, предлагаемое устройство содержит два основных компонента: 1) закрепляемый на объекте датчик измеряемого мгновенного плоского угла; 2) отсчетное устройство, устанавливаемое неподвижно на общей с объектом опоре (фундаменте) и позволяющее регистрировать перемещение лучей веера.
Имеется три существенных отличия предлагаемого устройства от прототипа:
1) предлагаемому устройству не нужен доступ к оси вращения платформы, что расширяет перечень поворотных платформ, в частности стендов качки, для аттестации которых может использоваться предлагаемое устройство;
2) устройство имеет возможность самоконтроля путем проведения внутренней калибровки;
3) в связи с возможностью расположения предлагаемого устройства в разных частях платформы, с его помощью можно наблюдать деформации платформы при вращении.
Исходя из изложенного выше, заявленная совокупность признаков позволяет получить устройство для измерений мгновенных угловых перемещений качающейся платформы, состоящее из совокупности многозначных мер плоского угла и отсчетного устройства на основе ПЗС-линеек, отличающееся расширенными функциональными возможностями, а также возможностью его внутренней калибровки в процессе эксплуатации без использования дополнительных средств.
Сущность изобретения поясняется представленными фигурами 1 и 2, где приведена обобщенная структура устройства и введены следующие обозначения:
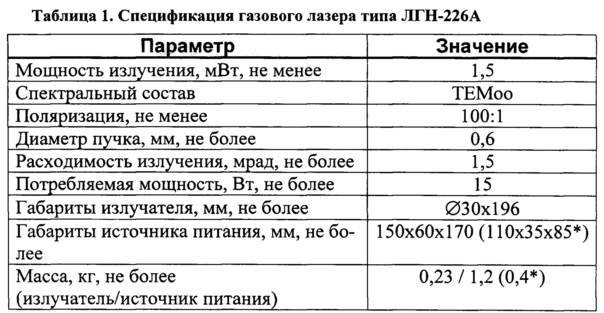
фиг. 1 - принципиальная схема расположения составных частей устройства: 1 - референтный лазер; 2 - референтный луч; 3 - кристалл с системой наложенных голограмм; 4 - поворотная платформа; 5 - веер дифрагированных лучей; 6 - фотоприемник; 7 - внешний ПК;
фиг. 2 - схема фотоприемника с засвеченными на нем дифрагированными лучами: 6 - фотоприемник; 8 - ПЗС-линейка; 9 - чувствительная зона ПЗС-линейки; 10 - зоны засветки дифрагированными лучами.
Лазер 1 с лучом 2 и кристаллом 3 образуют ГП.
Фотоприемник 6, подключенный к внешнему ПК 7, образует отсчетное устройство.
Устройство работает следующим образом. При повороте платформы 4 веер дифрагированных лучей 5 перемещается по фотоприемнику 6, с помощью которого фиксируется положение каждого луча, а именно номер пикселя на той или иной ПЗС-линейке 8. Фотоприемник 6 фиксирует дифрагированные лучи 5 в любом положении поворотной платформы 4. При повороте платформы 4 каждый из дифрагированных лучей 5 поворачивается на один и тоже угол, но на фотоприемнике 6 дифрагированные лучи 5 при этом перемещаются на разные расстояния. Знание расстояний, на которые перемещаются дифрагированные лучи 5, и углов между этими лучами позволяет установить соотношение "угол-растояние". Таким образом участок линейной шкалы между соседними лучами калибруется в угловых единицах и, как следствие, при следующем повороте платформы 4 лучи 5 будут перемещаться по откалиброванной угловой шкале.
Таким образом, определение угла наклона платформы 4 основано на сравнении измеряемого плоского угла с углами между дифрагированными лучами 5. Это сравнение опосредовано указанной выше калибровкой регистратора, с учетом орбитального движения центра веера дифрагированных лучей 5. Расчет координат центра веера дифрагированных лучей 5 производится по координатам центров зон засветки 10 отсчетного устройства (фотоприемника) 6 дифрагированными лучами 5. Для нахождения центра веера 5 необходимо знать, как минимум, координаты трех центров зон засветки 10.
В качестве элементов отсчетного устройства (фотоприемника) 6 используются ПЗС-линейки 8. Каждая ПЗС-линейка 8 имеет свою чувствительную зону 9, которая образует так называемую локальную шкалу. Шкала фотоприемника 6 формируется в результате «сшивки» локальных шкал, которая проводится на этапе калибровки установки.
Обработку первичных сигналов ПЗС-линеек 8 с целью формирования отсчета (угла поворота) по шкале фотоприемника 6, а также ряд сервисных функций, включая формирование шкалы времени, необходимой для временной привязки фиксируемых мгновенных углов, выполняет внешний ПК 7, на который установлено соответствующее программное обеспечение.
Примером конкретной реализации предлагаемого устройства служит установка, состоящая из:
- двух ГП, формирующих два веера по шесть лучей, параллельных друг другу и перпендикулярных оси вращения стенда;
- двух неподвижных относительно призм маломощных референтных лазеров с источниками питания;
- неподвижного фотоприемника, включающего в себя два параллельных ряда ПЗС-линеек, по десять образцов в каждом ряду;
- внешнего ПК со специальным программным обеспечением.
Использование двух параллельных рядов ПЗС-линеек обусловлено тем, что соединение ПЗС-линеек вплотную, без зон нечувствительности, не представляется возможным. Для исключения зон нечувствительности ряды ПЗС-линеек сдвинуты относительно друг друга. В связи с наличием двух рядов ПЗС-линеек приходится использовать две ГП.
В качестве референтных выбраны газовые лазеры типа ЛГН-226А (ОАО НИИ ГРП «Плазма», Россия, www.plasmalabs.ru) с параметрами согласно табл. 1.
* - встраиваемый источник питания
В качестве ПЗС-линеек используются устройства типа SONY ILX 751 В с параметрами согласно табл. 2. В связи с тем, что ПЗС-линейки имеют зоны нечувствительности, для получения единой непрерывной шкалы фотоприемника линейки в рядах располагают друг относительно друга в шахматном порядке.
Для регистрации и обработки данных используется ПК с характеристиками согласно табл. 3.
В связи с особенностями устройства и требуемой высокой точностью, калибровка разделена на несколько этапов:
1) проверка стабильности устройства в целом;
2) калибровка фотоприемника;
3) калибровка каждой ГП и их сборки в целом;
4) калибровка устройства в целом.
На первом этапе проверяется стабильность показаний устройства при возвращении платформы в одно и то же положение. Целью калибровки фотоприемника (второй этап) является формирование шкалы фотоприемника. На третьем этапе происходит измерение с высокой точностью углов между дифрагированными лучами. Целью калибровки устройства в целом (четвертый этап) является составление его градуировочной таблицы.
Погрешность измерений плоского угла с помощью предлагаемого устройства зависит от:
- стабильности размеров пикселей на ПЗС-линейках;
- точности определения координат центров зон засветки;
- точности «сшивания» локальных шкал ПЗС-линеек в шкалу фотоприемника;
- точности определения углов в веере дифрагированных лучей;
- стабильности взаимного расположения фотоприемника и основания платформы;
- стабильности положения ГП на платформе в процессе измерения;
- точности выставки плоскости веера дифрагированных лучей относительно оси вращения платформы;
- точности выставки фотоприемника относительно плоскости веера дифрагированных лучей.
Размер пикселя является достаточно стабильной величиной, поэтому его изменение можно считать несущественным для измерений. Точность определения координат центров зон засветки обусловлена свойствами ПЗС-линеек и трактом обработки первичной информации. Точность «сшивки» и определения углов достаточно высока из-за используемого при этом оборудования с погрешностями порядка единиц микрометров и долей угловых секунд.
Стабильность взаимного расположения компонентов друг относительно друга определяется угловыми вибрациями основания. Необходимым условием работоспособности устройства является отсутствие угловых вибраций, превышающих 7'.
У разработанного образца отсутствует требование по доступности оси качания платформы. Образец имеет возможность самоконтроля путем проведения внутренней калибровки и наблюдения деформации платформы. Данные факты позволяют говорить о достижении заявленного технического результата.
Устройство для измерений мгновенных угловых перемещений качающейся платформы, состоящее из датчика измеряемого мгновенного плоского угла и неподвижного отсчетного устройства, отличающееся тем, что в качестве датчика служит совокупность многозначных голографических мер угла, формирующих каждая под воздействием внешнего оптического излучения стабильный плоский веер дифрагированных лучей с известными углами между лучами; вееры расположены в параллельных плоскостях и сдвинуты друг относительно друга на заданные углы, а в качестве отсчетного устройства служит фотоприемник на основе ПЗС-линеек, расположенных в виде параллельных рядов, количество которых равняется числу голографических мер; фотоприемник подключен к внешнему персональному компьютеру, который формирует шкалу времени.
Способ осуществления гидроакустической связи между автономными подводными аппаратами
Способ определения координат морской шумящей цели
Способ изготовления анизотропных одномодовых волоконных световодов
Способ проводки судна через заминированный район моря
Способ определения класса шумящего морского объекта
Способ изготовления радиационно-стойких волоконных световодов
Способ измерения фазового сигнала двулучевого волоконно-оптического интерферометра
Способ изготовления одномодовых световодов с германосиликатной сердцевиной
Распределенная система подводного наблюдения
Способ управления подвесом ротора электростатического гироскопа
Способ измерения компонент магнитного поля
Одноосный стенд для оценки амплитудно-частотной характеристики системы коррекции магнитного компаса

