Результат интеллектуальной деятельности: БОРТОВАЯ СТАНЦИЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ
Вид РИД
Изобретение
Предлагаемое устройство относится к области радиолокации, в частности к пассивным станциям обнаружения и целеуказания ракетному оружию, устройство может быть использовано при разработке систем радиотехнической разведки, а также в пассивных гидролокационных станциях.
Для определения координат источников излучения, размещенных на подвижных носителях, наиболее часто используются системы, разработанные на основе угломерных или разностно-дальномерных методов измерения координат (см. ″Теоретические основы радиолокации″ под ред. Я.Д. Ширмана, М., Сов. радио, 1970 г., стр. 494-497).
Угломерный метод применяется в том случае, когда с помощью нескольких (не менее двух) измерительных систем, расположенных в различных точках пространства, определяются только направления на цель. Тогда местоположение источника излучения находится как точка пересечения линий пеленгов.
При разностно-дальномерном методе определения координат используется измерение разности времен прихода одного и того же сигнала от источника излучения на трех измерительных системах, разнесенных в пространстве, с последующим построением гипербол, точки пересечения которых являются координатами источника излучения.
К недостаткам названных методов следует отнести требование наличия как минимум двух (трех) измерительных систем, разнесенных в пространстве и синхронизированных во времени, что понижает скрытность работы пассивных систем.
Известен ряд вариантов способов определения дальности до движущейся цели по данным ее пеленгования с одиночного движущегося носителя, совершающего специальный маневр. Так, в книге В.А. Хвоща - Тактика подводных лодок, - стр. 242-243, рис. 6.2 и 6.3 (М., Воениздат, 1989) приведены варианты определения дальности по двум пеленгам (в начале и конце маневра) для случаев выполнения носителем маневра с изменением борта слежения, т.е. с пересечением курса цели у нее по корме, и маневра с изменением позиции слежения по пеленгу, оставаясь на прежнем борту цели (метод фиктивного пеленга). В первом случае место (дальность) цели на линии второго пеленга определяют, вмещая между пеленгами отрезок, равный пройденному целью пути за время маневра, параллельно ее курсу. Во втором случае первый пеленг определяют после уравнивания скоростей носителя и цели (по признаку постоянства пеленга цели).
Затем увеличивают скорость носителя и после изменения пеленга цели на 25-35° измеряют второй пеленг, из точки измерения первого пеленга откладывают отрезок пути, который был бы пройден носителем за время маневра при первоначальной скорости (равной, при параллельных курсах, скорости цели) и находят место цели как точку пересечения линии фиктивного пеленга, проведенной из конца упомянутого отрезка параллельно первому пеленгу, и линии второго пеленга.
Аппаратная реализация этих вариантов достаточно проста, однако при этом требуется предварительное знание курса и скорости цели (или маневр с выравниванием скоростей носителя и цели), что бывает возможным в условиях пассивной гидроакустической разведки, но обычно не имеет места (или не может быть реализовано) при ведении радиотехнической разведки далеко за пределами радиогоризонта или при разведке высокоскоростных целей.
Известен способ определения координат подвижных источников излучения, при котором на прямом галсе корабля-носителя станции определяют в дискретные моменты времени пеленги на цель, сглаживают их и определяют величину изменения пеленга. На обратном галсе определяют пеленги на цель, сглаживают и вновь определяют величину изменения пеленга.
Наиболее близкой по технической сути и поэтому выбранной в качестве прототипа является бортовая пассивная станция определения координат движущихся источников излучения, содержащая последовательно соединенные антенну, приемник, блок кодирования, блок выделения последовательностей сигналов, блок идентификации, блок определения пеленга источника излучения и блок сглаживания, первый выход которого является выходом сигнала пеленга источника излучения, содержащая также блок управления положением антенны, датчик угла положения антенны, вычислитель дальности до источника излучения, выход которого является выходом сигнала дальности бортовой пассивной станции и блок памяти величин изменения пеленга источника излучения при прямом и обратном галсах носителя, включенный между вторым выходом блока сглаживания и первым и вторым входами вычислителя дальности, при этом выход блока управления положением антенны соединен с управляющим входом антенны и через датчик угла положения антенны с вторым входом блока выделения последовательностей сигналов, третий, четвертый и пятый входы вычислителя дальности являются соответственно входами сигналов скорости носителя при прямом и обратном галсе и интервала времени измерения координат источника излучения.
Станция-прототип на прямом галсе носителя, совершаемом под углом 90° к первоначальному значению пеленга источника излучения, измеряет величину изменения пеленга (ВИПпр).
На обратном галсе измеряет ВИПобр. В основу метода положено предположение, что разность ВИПпр и ВИПобр соответствует такой величине изменения пеленга, которая соответствует случаю, когда источник излучения расположен на первоначальной дальности и остается неподвижным, а носитель совершает галс с удвоенной скоростью. Дальность до источника излучения при этом определяется выражением:
Д=(Vпр+Vобр)·t·Ctg[(ВИПпр-ВИПобр)t]
где Vпр, Vобр - скорость носителя соответственно на прямом и обратном галсе.
t - время решения задачи.
Станция-прототип обеспечивает возможность определения дальности до цели с достаточной точностью (~5÷7%) в большинстве ситуаций при ведении дальней (загоризонтной) разведки надводных кораблей по излучениям их РЛС с борта водоизмещающего корабля-носителя станции разведки, когда расстояние между целью и носителем значительно (в ~8÷10 раз) больше, чем величина перемещения цели и носителя за время разведки.
Однако в ряде других случаев - при ведении разведки скоростных целей и (или) при размещении станции разведки на скоростном носителе (корабле-экраноплане, вертолете, самолете), а также при ведении разведки на относительно малых дальностях погрешность определения расстояния до цели станцией-прототипом, реализующей вышеприведенный алгоритм обработки сигналов, значительно возрастает, в связи с чем резко снижается эффективность целеуказания средствам поражения цели.
Таким образом, недостаток прототипа заключается в низкой точности определения дальности до скоростных целей (самолетов, экранопланов, кораблей на воздушной подушке), особенно при ведении разведки со скоростных носителей, что обусловлено методической погрешностью, присущей реализованной в прототипе процедуре обработки сигналов, основанной на линейной аппроксимации закона изменения пеленга в процессе разведки.
Такое допущение было бы справедливо, например, для случая когда источник излучения неподвижен, а носитель станции-прототипа совершает галс по дуге окружности, радиус которой равен дальности до источника излучения. В реальных же условиях за время обнаружения и решения задачи определения координат (время выполнения двух галсов), дальность до источника излучения непостоянна, а следовательно, непостоянна и отличается от линейной скорость изменения во времени его пеленга. И такое отличие будет тем больше, чем с большей скоростью движутся цель-источник излучения и носитель станции разведки, и чем меньше дальность до источника излучения, тем, соответственно, большей будет и ошибка.
Целью предлагаемого технического решения является повышение точности определения текущей дальности до движущейся цели, особенно при разведке скоростных объектов со скоростных носителей.
Для достижения поставленной цели в известное устройство, содержащее последовательно соединенные антенну, приемник, блок кодирования, блок выделения последовательностей сигналов, блок идентификации, блок определения пеленга источника излучения, а также блок управления положением антенны, выход которого соединен с антенной и через датчик угла положения антенны - с вторым входом блока выделения последовательностей сигналов и блок вычислителя дальности, при этом выход блока определения пеленга источника, выход и три входа блока вычислителя дальности соединены с внешними устройствами, дополнительно введены блок экстраполяции координат и формирователь угла разности галсов, два входа которого соединены с внешними устройствами, а выход - с четвертым входом блока вычислителя дальности, пятый вход которого соединен с упомянутым выходом блока определения координат источника излучения, шестой вход блока вычислителя дальности соединен с выходом блока экстраполяции координат, вход которого соединен с упомянутым выходом блока определения координат источника излучения.
При этом блок вычислителя дальности содержит первый и второй умножители, первые и объединенные вторые входы которых соединены с внешними устройствами, а выходы соединены со входами первого сумматора, содержит последовательно соединенные второй сумматор, третий сумматор и постоянно-запоминающее устройство (ПЗУ), при этом первый вход второго сумматора соединен с выходом вычислителя угла разности галсов, второй вход второго сумматора и второй вход ПЗУ соединены с выходом блока экстраполяции координат, выход второго сумматора соединен также с третьим входом ПЗУ, второй вход третьего сумматора соединен с выходом блока определения пеленга источника излучения, первый и второй выходы ПЗУ соединены с двумя входами четвертого сумматора, выход которого и третий выход ПЗУ соединены с двумя входами третьего умножителя, выход третьего умножителя, а также выход первого сумматора, соединены с двумя входами четвертого умножителя, выход которого является выходом блока вычислителя дальности.
Блок экстраполяции координат содержит первый и второй сумматоры, первые и объединенные вторые входы которых соединены с выходом блока определения пеленга источника излучения, а выходы соединены со входами первого умножителя, упомянутый выход первого сумматора через квадратор и упомянутый выход второго сумматора соединены со входами второго умножителя, выход которого соединен с первым входом третьего умножителя, второй вход третьего умножителя через третий сумматор соединен с выходом первого умножителя, а выход соединен с первым входом четвертого сумматора, второй вход которого соединен с первым входом первого сумматора, выход четвертого сумматора является выходом блока экстраполяции координат.
Сущность предложения заключается во введении в состав станции определенным образом выполненных дополнительных блоков (формирователя угла разности галсов и блока экстраполяции, что совместно с новым выполнением блока вычислителя дальности позволяет реализовать существенно видоизмененную процедуру обработки совокупности входных сигналов, дающую значительно более точное значение текущей дальности до пеленгуемой цели, особенно при разведке скоростных объектов, и обеспечивающую возможность решения задачи при большей вариативности маневра (направление обратного галса) носителя станции разведки, чем в прототипе.
При этом линейным представляется не величина изменения пеленга источника излучения за единицу времени, а отношение приращений пеленга на последовательных смежных участках траектории условно продолженной линии прямого галса носителя. Дальность источника излучения при этом находится по более точной формуле
где L - база измерения, равная пути, пройденному носителем на прямом и обратном галсе;
ξ - угол между линиями галсов;
ε - курсовой угол источника излучения и линией обратного галса в его конце;
ξ - угол между линиями галсов;
ε′ - экстраполированное значение курсового угла источника излучения, отсчитанное относительно условно продолженной линии первого галса в точке, соответствующей моменту измерения угла.
Угол ε′ находится по известным курсовым углам источника излучения - α, β, γ, отсчитанным относительно линии прямого галса в его начале, середине и конце
Таким образом, более приближенное к реальным условиям представление закона изменения пеленга источника излучения при определении экстраполированного значения его пеленга в предлагаемом устройстве позволяет повысить точность определения дальности.
Преимущество предлагаемого технического решения над известным заключается также и в возможности выполнения обратного галса под некоторым углом ξ к линии прямого галса; значение угла ξ учитывается в реализуемой согласно предложению процедуре обработке сигналов.
Возможность выполнения обратного галса под углом к прямому расширяет возможности маневра носителя станции и маскирует его действия.
Авторами не обнаружены решения со сходными признаками, на основании чего они делают вывод, что предложенное решение обладает новизной и существенными техническими отличиями.
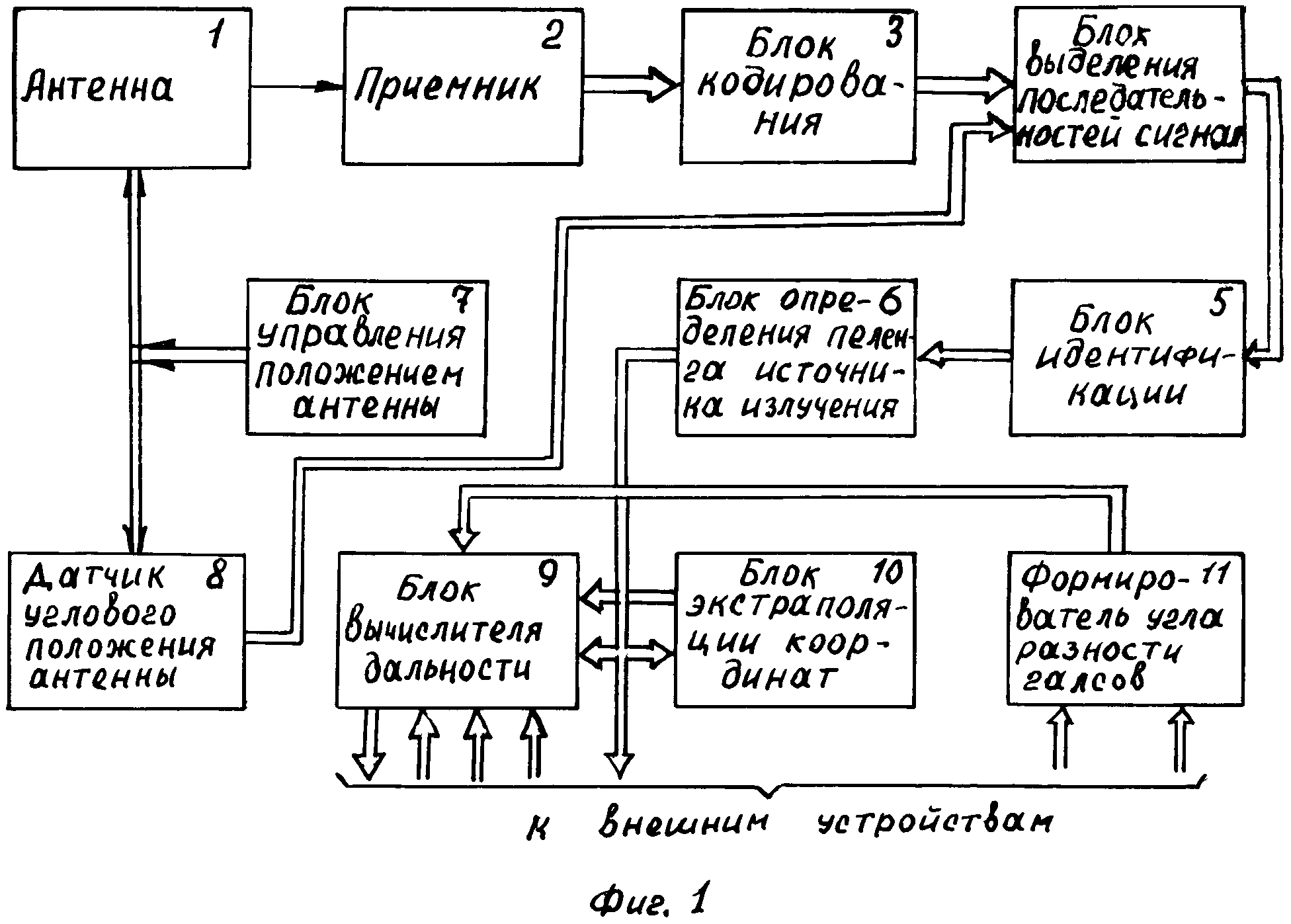
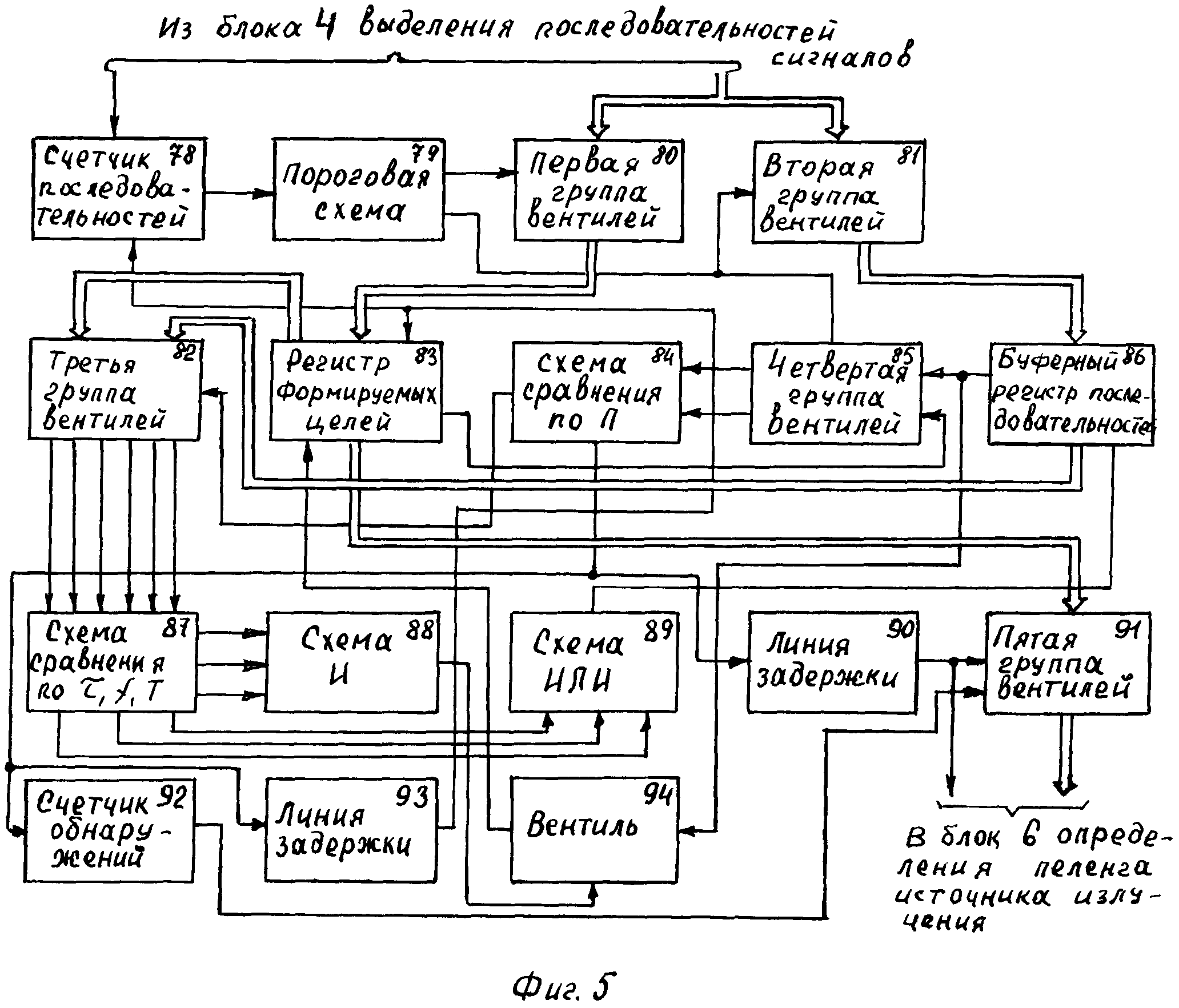
Сущность предлагаемого устройства поясняется чертежами, где на фиг. 1 представлена блок-схема бортовой станции определения координат источников излучения; на Фиг. 2 - блок-схема приемника; на Фиг. 3 - блок-схема блока кодирования; на фиг. 4 - блок-схема блока выделения последовательностей сигналов; на фиг. 5 - блок-схема блока идентификации; на фиг. 6 - блок-схема блока вычислителя дальности; на фиг. 7 - блок-схема блока экстраполятора координат; на фиг. 8 - зависимости ошибок определения дальности от дальности.
Предлагаемая пассивная станция определения координат движущихся источников излучения (см. фиг. 1) содержит последовательно соединенные антенну 1, приемник 2, блок 3 кодирования, блок 4 выделения последовательностей сигналов, блок 5 идентификации, блок 6 определения пеленга источника излучения, блок 7 управления положением антенны, выход которого соединен с антенной 1 и через датчик 8 угла положения антенны - с вторым входом блока 4 выделения последовательностей сигналов, содержит блок вычислителя дальности 9, при этом выход блока 6 определения пеленга источника излучения, выход и три входа блока вычислителя дальности 9 соединены с внешними устройствами индикации, управления и навигации, содержит блок 10 экстраполяции координат и формирователь 11 угла разности галсов, входы которого соединены с выходами навигационной системы носителя, а выход - с четвертым входом блока вычислителя дальности 9, пятый вход которого соединен с упомянутым выходом блока 6 определения пеленга, шестой вход блока вычислителя дальности 9 соединен с выходом блока 10 экстраполяции координат, вход которого соединен с выходом блока 6 определения пеленга источника излучения.
Особенности построения и исполнение блоков и устройств станции следующие.
Антенна 1 и блок 7 управления антенной являются типовыми устройствами радиолокационных станций, техническая реализация которых подробно описана в литературе (см. Сколник ″Введение в технику радиолокационных систем″, М., 1965 г., стр. 314-429, Б.К. Чемоданов ″Следящие приводы″, ″Энергия″, М., 1976 г., кн. 2, стр. 3-10).
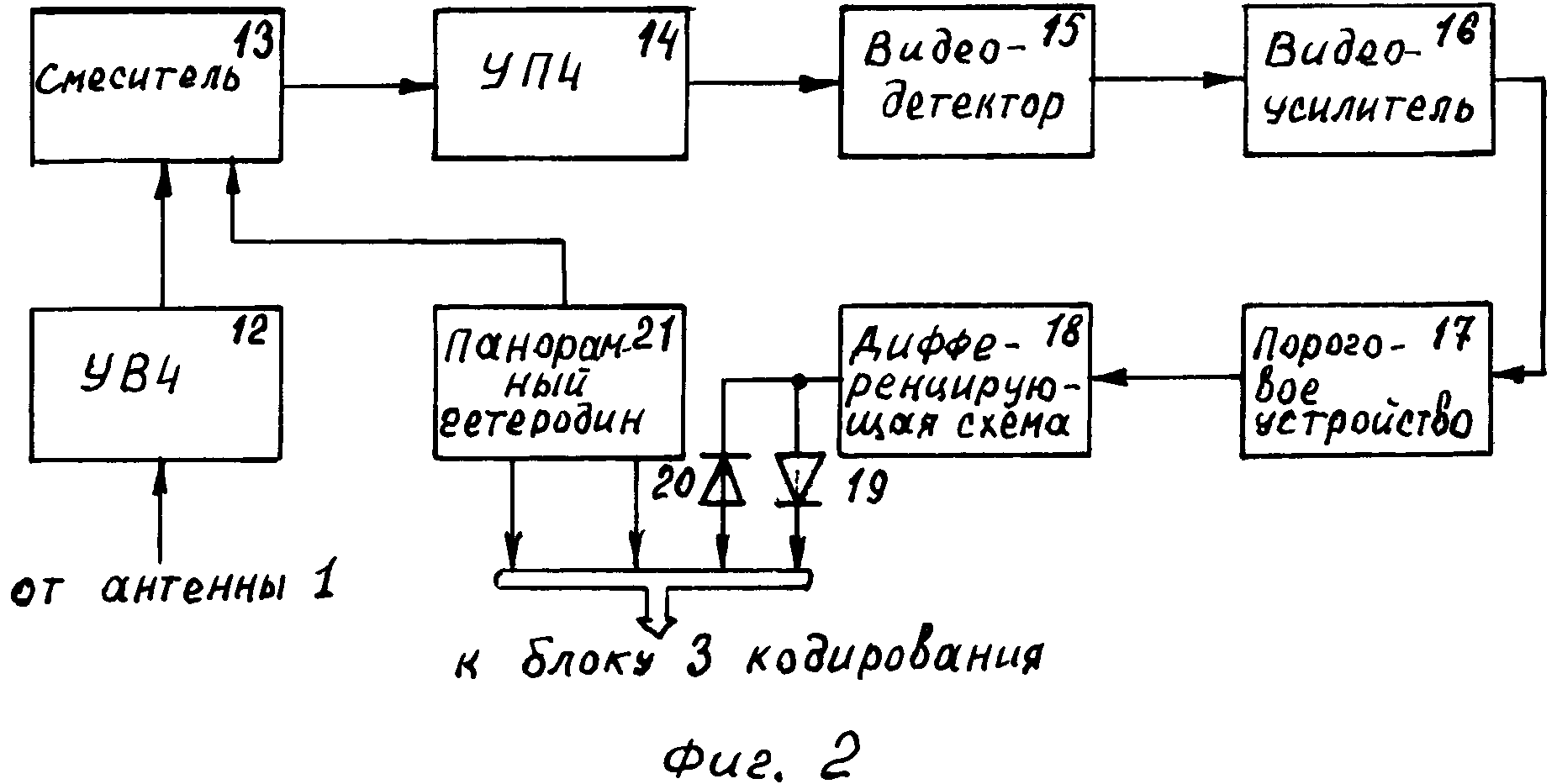
Приемник 2 (см. фиг. 2) состоит из последовательно соединенных усилителя высокой частоты (УВЧ) 12, смесителя 13, усилителя промежуточной частоты УПЧ 14, видеодетектора 15, видеоусилителя 16, порогового устройства 17, дифференцирующей схемы 18, к выходу которой подсоединены диоды Д1 19 и Д2 20, содержит также панорамный гетеродин 21, первый выход которого соединен с вторым входом смесителя 13, а второй и третий выходы и выходы диодов 19 и 20 являются выходом приемника 2.
Работает приемник 2 следующим образом.
Принятые антенной 1 сигналы поступают на вход УВЧ12, где они усиливаются и поступают на первый вход смесителя 13, на второй вход которого поступает напряжение с выхода панорамного гетеродина 21. С выхода смесителя 13 сигнал разностной частоты усиливается в УПЧ14, после чего выделяется огибающая импульса в видеодетекторе 15 с последующим усилением в видеоусилителе 16, из которого импульс поступает в пороговое устройство 17, после которого стоит дифференцирующая схема 18, на выходе которой формируются управляющие сигналы ″начало″ и ″конец″, соответствующие переднему и заднему фронтам импульса. Через диоды Д1 19 и Д2 20 они поступают в блок 3 кодирования. Панорамный гетеродин 21 перестраивается в заданной полосе частот. Дополнительные управляющие сигналы ″начало полосы″ и ″конец полосы" формируются в маркерных резонаторах (см. В.А. Мартынов и др. ″Панорамные приемники и анализаторы спектра″, М., ″Сов. радио″, 1980 г., с. 323-329). Второй и третий выходы панорамного гетеродина 21 являются выходом приемника 2, по которому управляющие сигналы ″начало полосы″ и ″конец полосы″ поступают в блок 3 кодирования.
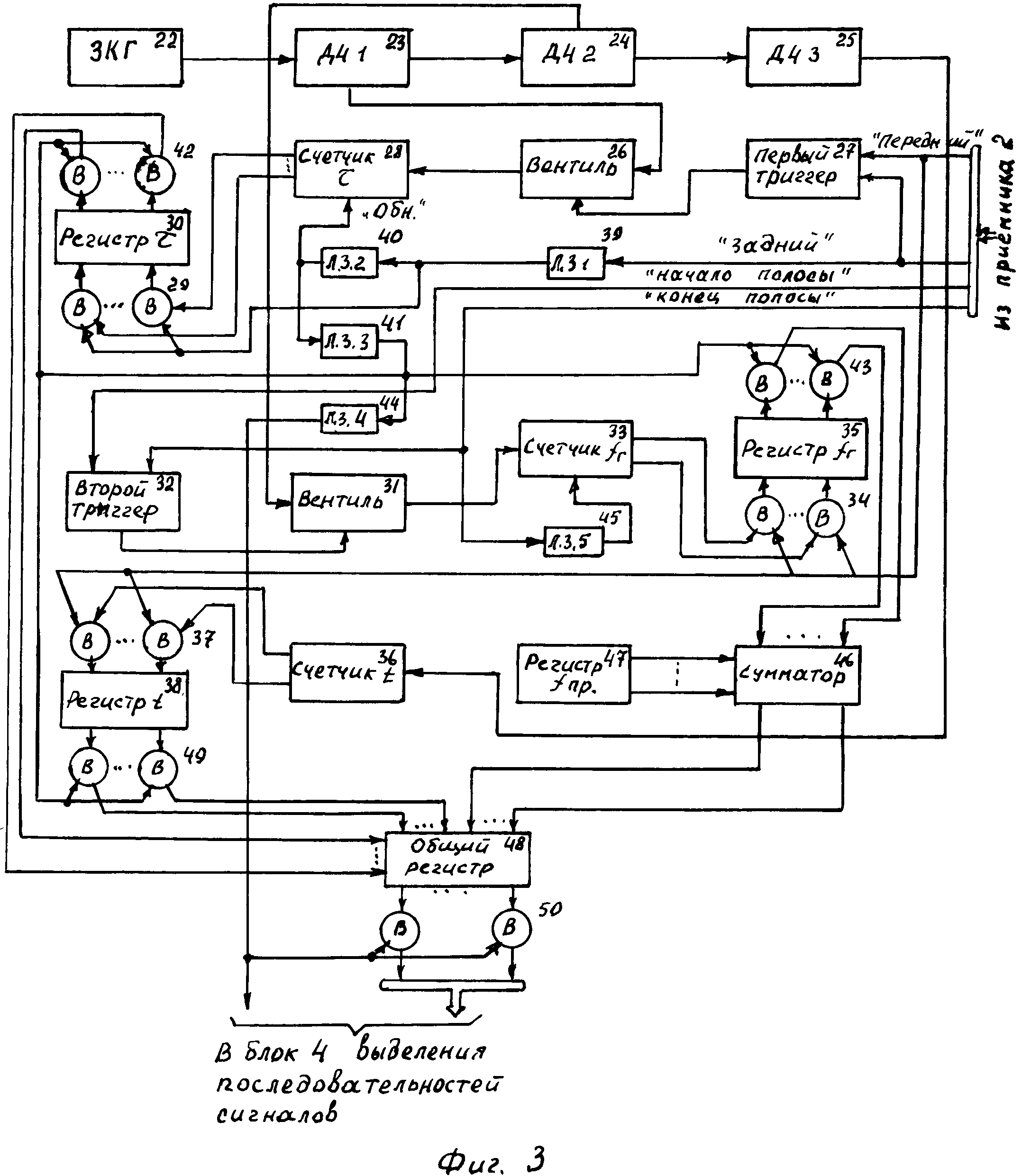
Блок 3 кодирования содержит последовательно соединенные задающий кварцевый генератор (ЗКГ) 22, делитель 23 частоты (ДЧ1), делитель 24 частоты (ДЧ2) и делитель 25 частоты (ДЧ3), второй выход ДЧ1 23 через вентиль 26, с вторым - управляющим входом которого соединен выход первого триггера 27, соединен с первым входом (счетным) счетчика 28 τ, выходы которого через вентили (В) 29 соединены со входами регистра τ 30, второй выход ДЧ2 24 через вентиль 31, второй - управляющий вход которого соединен с выходом второго триггера 32, соединен с первым (счетным) входом счетчика 33 fг, выходы которого через вентили (В) 34 соединены со входами регистра 35 fг, выход ДЧ3 25 соединен с входом счетчика 36t, выходы которого через вентили В 37 соединены со входами регистра 38t, первый вход первого триггера 27, а также вторые входы вентилей 34 и 37 соединены со входом блока 3 кодирования, второй вход триггера 27, а также вход линии 39 задержки (ЛЗ1), соединены со входом блока 3 кодирования, выход ЛЗ1 39 соединен со вторыми входами вентилей 29 и через ЛЗ2 40 - со вторым входом счетчика 28τ и входом ЛЗ 341, выход ЛЗ3 41 соединен со входом ЛЗ4 44 и с первыми (управляющими) входами вентилей 42 и вентилей 43, информационные входы которых соединены соответственно с выходами регистра 30τ и регистра 35 fr, первый вход второго триггера 32 соединен со входом блока 3 кодирования, второй вход триггера 32 и вход Л35 45, выход которой соединен с вторым - обнуляющим входом счетчика 33, также соединены со входом блока 3 кодирования, выходы вентилей 43 соединены с первым входом сумматора 46, вторые входы которого соединены с выходами регистра 47, а выходы - с первыми входами общего регистра 48, упомянутый выход ЛЗ3 41 соединен также с первыми - управляющими входами вентилей 49, выходы регистра 38t соединены со вторыми входами вентилей 49, выходы которых соединены со вторыми входами общего регистра 48, выходы вентилей 42 соединены с третьими входами общего регистра 48, выходы которого соединены с первыми входами вентилей 50, выход ЛЗ4 44, соединенный также со вторыми - управляющими входами вентилей 50, а также выходы вентилей 50 являются выходом блока 3 кодирования, соединенным со входом блока 4 выделения последовательностей сигналов.
Блок 3 кодирования работает, используя метод заполнения задаваемого интервала времени импульсами эталонной частоты с последующим их подсчетом. ЗКГ 22 генерирует импульсы тактовой частоты, которая затем делится делителями ДЧ1 23, ДЧ2 24 и ДЧ3 25 таким образом, чтобы удовлетворять требованиям обеспечения заданной величины цен младших разрядов при кодировании параметров τ, f, t (длительности импульсов, несущей частоты, времени). Дополнительный сигнал ″передний″ (соответствующий переднему фронту импульса) поступает на первый вход первого триггера 27 и устанавливает его в такое положение, при котором вентиль 26 открывается и пропускает счетные импульсы из ДЧ1 23 на вход счетчика 28τ. Дополнительный сигнал ″задний″ (соответствующий заднему фронту импульса) поступает на второй вход триггера 27, который опрокидывается и запирает вентиль 26, не разрешая прохождение счетных импульсов. Сигнал ″задний″ через линию ЛЗ1 39 поступает на управляющие входы вентилей 29, которые содержимое счетчика 28τ перезаписывают в регистр 30τ. Задержавшись в ЛЗ2 40, сигнал ″задний″ обнуляет счетчик 28τ, подготавливая его к кодированию длительности (τ) следующего импульса и задержавшись в ЛЗ3 41 переписывает код длительности импульса из регистра 30 в общий регистр 48. Кодирование частоты (f) производится аналогичным образом, но при этом используется второй триггер 32, а управляющими сигналами служат сигналы ″начало полосы″ и ″конец полосы″. Кодирование времени (t) прихода импульсов производится путем подачи счетных импульсов из ДЧ3 25 в счетчик 36t. Сигналом ″передний″, поступающим на управляющие входы вентилей 37, содержимое счетчика 36t на данный момент времени переписывается в регистр 38t. Коды длительности импульса из регистра 30τ, времени из регистра 38t, частоты из регистра 35f собираются в общем регистре 48 и через вентили 50 многократно задержанным импульсом ″задний″ выводятся в блок 4 выделения последовательностей сигналов.
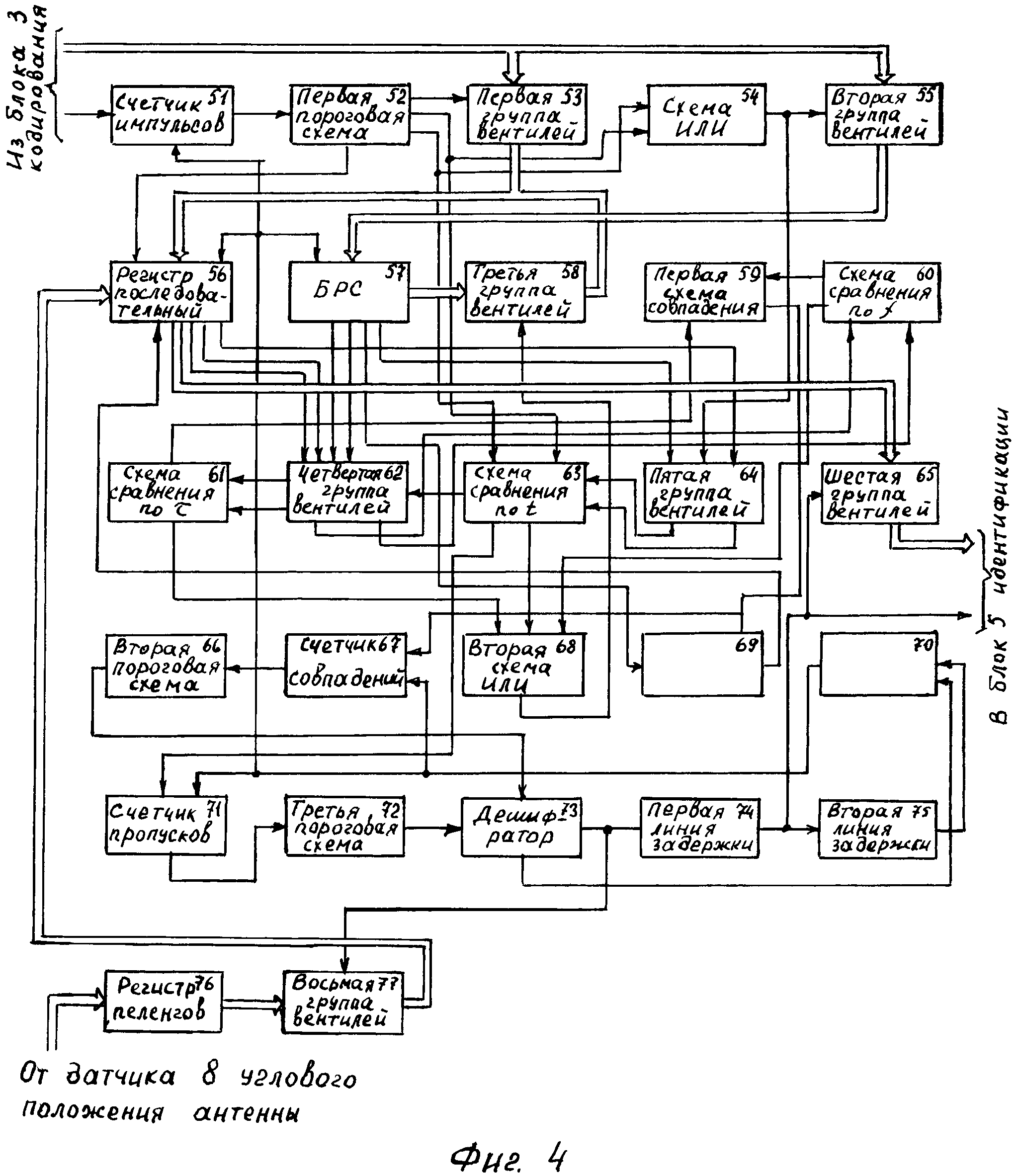
Блок 4 выделения последовательностей сигналов (фиг. 4) содержит счетчик 51 импульсов, первую пороговую схему 52, первую группу вентилей 53, первую схему ИЛИ 54, вторую группу вентилей 55, регистр 56 последовательный, буферный регистр 57 сигналов, третью группу 58 вентилей, первую схему 59 совпадения, схему 60 селекции по f, схему 61 селекции по τ, четвертую группу вентилей 62, схему 63 селекции по t, пятую группу вентилей 64, шестую группу вентилей 65, вторую пороговую схему 66, счетчик 67 совпадений, вторую схему ИЛИ 68, седьмую группу вентилей 69, третью схему ИЛИ 70, счетчик пропусков 71, третью пороговую схему 72, дешифратор 73, первую линию задержки 74, вторую линию задержки 75, регистр пеленгов 76 и восьмую группу вентилей 77, при этом выход счетчика 51 импульсов соединен со входом первой пороговой схемы 52, первый выход которой соединен со входом первой группы вентилей 53, второй и третий - с двумя входами первой схемы ИЛИ 54 и первыми двумя входами схемы 63 селекции по t, а четвертый - с первым входом регистра 56 последовательного, выход первой 53 и третьей 58 групп вентилей соединены со вторым входом регистра 56 последовательного, выход первой схемы ИЛИ 54 соединен с первыми входами второй 55 и пятой 64 групп вентилей, выход второй группы вентилей 55 соединен с первым входом буферного регистра 57 сигналов, первый выход которого соединен с первым входом третьей группы вентилей 58, второй и третий - с первым и вторым входами четвертой группы вентилей 62, четвертый - со вторым входом пятой группы вентилей 64, а седьмой - с первым входом седьмой группы вентилей 69, выход которой соединен с третьим входом регистра 56, четвертый вход регистра 56, а также второй вход буферного регистра 57 сигналов, первые входы счетчика 51 импульсов, счетчика 67 совпадений и счетчика 71 пропусков соединены с выходом третьей схемы ИЛИ 70, первый выход регистра 56 соединен с первым входом шестой группы вентилей 65, второй и третий - с третьим и четвертым входами четвертой группы вентилей 62, а четвертый - с третьим входом пятой группы вентилей 64, два выхода которой соединены с третьим и четвертым входами схемы 63 селекции по t, первый выход схемы 63 селекции по t соединен с первым входом второй схемы ИЛИ 68, второй - со вторым входом счетчика 71 пропусков, а третий - с пятым входом четвертой группы вентилей 62, первый и второй выходы которой соединены соответственно с первым и вторым входами схемы 60 селекции по f, а третий и четвертый - с первым и вторым входами схемы 61 селекции по τ, первый и второй выходы которой соответственно соединены с первым и вторым входами первой схемы 59 совпадения и второй схемы ИЛИ 69, первый выход схемы 60 селекции по f соединен со вторым входом первой схемы 59 совпадения, а второй - с третьим входом второй схемы ИЛИ 68, выход которой соединен со вторым входом третьей группы вентилей 58, выход первой схемы 59 совпадения соединен со вторыми входами счетчика 67 совпадений и седьмой группы вентилей 69, выход счетчика 67 совпадений через вторую пороговую схему 66 подключен к первому входу дешифратора 73, второй вход которого через третью пороговую схему 72 соединен с выходом счетчика 71 пропусков, первый выход дешифратора 73 через первую 74 и вторую 75 линии задержки соединен с первым входом третьей схемы ИЛИ 70, второй вход которой соединен со вторым выходом дешифратора 73, вход регистра 76 пеленгов соединен с выходом датчика 8 углового положения антенны, а выход через восьмую группу вентилей 77, второй (управляющий) вход которой соединен с упомянутым первым выходом дешифратора 73, соединен с пятым входом регистра 56 последовательного, вторые входы первой 53 и второй 55 групп вентилей, а также вход счетчика 51 импульсов, соединены с выходом блока 3 кодирования, выход шестой группы вентилей 65 и подключенный также к ее второму входу выход первой линии задержки 74 - соединены с входом блока 5 идентификации.
Работает блок 4 выделения последовательностей сигналов следующим образом. С выхода блока 3 кодирования коды параметров τ, f, t каждого обнаруженного сигнала поступают на входы первой 53 и второй 55 групп вентилей, а сигнал "Старт" поступает на вход счетчика 51 импульсов. Содержимое счетчика 51 импульсов поступает на вход первой пороговой схемы 52 (которая представляет собой схему сравнения, первый вход которой является входом пороговой схемы, а второй соединен с ПЗУ констант, в котором прошита двойка), а выходы схемы сравнения, соответствующие логике А<2, А=2 и А>2, являются выходами первой пороговой схемы 52. Если это пришел первый "Старт", то с первого выхода первой пороговой схемы 52 поступает управляющий сигнал на первую группу вентилей 53, через которую коды записываются в регистр 56 как начало новой последовательности с параметрами τ, f, tн=t, tк=t. При приходе второго и всех последующих сигналов открывается вторая группа вентилей 55, через которые коды сигналов записываются в буферный регистр сигналов (БРС) 57. Коды tн из регистра 56 и t из БРС 57 через пятую группу вентилей 64 поступают на схему 63 селекции по t (СС по t), на два других входа которой поступают управляющие сигналы со второго и третьего выходов первой пороговой схемы 52.
Схема 63 селекции по t состоит из последовательно соединенных вычитающей схемы, входы которой являются третьим и четвертым входами СС по t 63 и схемы сравнения, а также из ПЗУ констант, ОЗУ, схемы И, ИЛИ и семи вентилей В1-В7. Первый вход СС по t 63 соединен с управляющими входами вентилей В1 и В3, а также поступает на вход схемы И, выход которой соединен с управляющим входом вентиля В2. Первый и второй выходы схемы сравнения соединены со входами схемы ИЛИ, выход которой соединен с вторым входом схемы И. Выход вычитающей схемы соединен через вентиль В2 с ОЗУ, выход которого через вентиль В4 соединен со вторым входом схемы сравнения. Код, равный возможно допустимому значению периода повторения T, с выхода ПЗУ констант через вентиль В1 поступает на второй вход схемы сравнения. Второй вход СС по t 63 соединен с управляющими входами вентилей В4, В5, В6. Третий выход схемы сравнения соединен через вентиль В6 со вторым выходом СС по t 63, а через вентиль В3 - с первым выходом СС по t 63. Выход схемы "ИЛИ" через вентиль В7 соединен с третьим выходом СС по t 63. Управляющий вход вентиля В7 соединен с выходом схемы И. При сравнении Δt с ранее измеренным tизм (либо Δt<Tmax) с третьего выхода СС по t 63 выдается управляющий сигнал на четвертую группу вентилей 62, через которые коды τ и f из регистра 56 и БРС 57 поступают на входы схемы 61 сравнения по τ (СС по τ) и схемы 60 сравнения по f. При равенстве соответствующих кодов на первую схему 59 совпадения поступает два сигнала. С выхода первой схемы 59 совпадения поступает управляющий сигнал на седьмую группу вентилей 69, через которые код t из БРС 57 записывается как tк в регистр 56 и увеличивается на единицу содержимое счетчика 67 совпадений. Если содержимое счетчика 67 совпадений превысило порог во второй пороговой схеме 66, то с нее выдается управляющий сигнал на дешифратор 73 (выполнился критерий обнаружения последовательности). Если не произошло сравнение по одному из параметров τ либо f, а также в случае если Δt>Tmax, то с выхода второй схемы ИЛИ 68 поступает сигнал на управляющие входы третьей группы вентилей 58, через которые коды параметров вновь обнаруженного сигнала переписываются из БРС 57 в регистр 56 как начало последовательности. Если в СС по t 70 Δt>Tизм, то с ее второго выхода поступает сигнал на счетчик 71 пропусков, увеличивая его содержимое на единицу. Если содержимое счетчика 71 пропусков больше порога третьей пороговой схемы 72 (выполняется критерий окончания последовательности), то с выхода третьей пороговой схемы 72 выдается сигнал на вход дешифратора 73. Если на управляющем входе дешифратора 73 отсутствует сигнал со второй пороговой схемы 66 (т.е. не выполнился критерий обнаружения), то со второго выхода дешифратора 73 поступает сигнал на третью схему ИЛИ 70, с выхода которой формируется сигнал ″обнуление″ счетчика 51 импульсов, регистра 56, БРС 57, счетчика 67 совпадений и счетчика 71 пропусков. Если на управляющем входе дешифратора 73 присутствует сигнал со второй пороговой схемы 66, то на его первом выходе появится сигнал, по которому через восьмую группу вентилей 77 код углового положения антенны с регистра 76 пеленгов поступает в регистр 56, последовательный как пеленг Пi последовательности. После записи пеленга сигнал с выхода дешифратора 73 через линию задержки 74 поступает на управляющий вход шестой группы вентилей 65, через которые коды последовательности τ, f, T, t и Пi поступают в блок 5 идентификации, куда поступает также и управляющий сигнал. Кроме того, тот же сигнал с дешифратора 73 через первую 74 и вторую 75 линии задержки поступает на вход третьей схемы ИЛИ 70 и устанавливает блок 4 выделения последовательностей сигналов в исходное состояние.
Блок 5 идентификации (см. фиг. 5) содержит счетчик 78 последовательностей, пороговую схему 79, первую группу вентилей 80, вторую группу вентилей 81, третью группу вентилей 82, регистр 83 формируемых целей, схему 84 сравнения по П, четвертую группу вентилей 85, буферный регистр 86 последовательностей, схему 87 сравнения по τ, f и T, схему И 88, схему ИЛИ 89, линию 90 задержки, пятую группу вентилей 91, счетчик 92 обнаружений, линию 93 задержки и вентиль 94, при этом первый вход счетчика 78 последовательностей и первые входы первой 80 и второй 81 групп вентилей являются входом блока 5 идентификации, выход счетчика 78 соединен со входом пороговой схемы 79, первый выход которой соединен со вторым входом первой группы вентилей 80, а второй - с вторым входом (управляющим) второй группы вентилей 81 и первым управляющим входом четвертой группы вентилей 85, выходы первой 80 и второй 81 групп вентилей соответственно соединены с первыми входами регистра 83 формируемых целей и буферного регистра 86, первый вход третьей группы вентилей 82 соединен с первым выходом регистра 83, второй - с первым выходом регистра 86, третий - с первым выходом схемы 84 сравнения по П (СС по П), а шесть выходов соединены с шестью входами схемы 87 сравнения по τ, f и T, второй вход регистра 83 и второй вход (обнуляющий) счетчика 78 соединены через линию 93 задержки с вторым выходом СС по П 84, третий вход соединен с выходом вентиля 94, второй выход соединен с первым входом пятой группы вентилей 91, а третий выход соединен с вторым входом четвертой группы вентилей 85, третий вход которой и первый вход вентиля 94 соединены с вторым выходом буферного регистра 86, три первых выхода схемы 87 сравнения соединены со входами схемы И 88, выход которой соединен со вторым (управляющим) входом вентиля 94, три других выхода схемы 87 сравнения соединены со входами схемы ИЛИ 89, выход которой соединен со вторым входом буферного регистра 86, два выхода четвертой группы вентилей 85 соединены с двумя входами СС по П 84, второй выход которой соединен со входом счетчика 92 обнаружений и через линию 90 задержки с вторым (управляющим) входом пятой группы вентилей 91, выход счетчика 92 соединен с входом пятой группы вентилей 91, упомянутый второй выход СС по П 84 и выход пятой группы вентилей 91 являются выходом блока 5 идентификации и соединены со входом блока 6 определения пеленга.
Коды каждой оконченной последовательности τ, f, T, t и Пi поступают на входы первой 80 и второй 81 групп вентилей. На вход счетчика 78 одновременно поступает управляющий сигнал. Содержимое счетчика 78 поступает на пороговую схему 79 (которая представляет собой схему сравнения, первый вход которой является входом пороговой схемы 79, а второй соединен с ПЗУ констант, где прошит код, равный двум, выход, соответствующий логике А≥2, является первым выходом пороговой схемы 79, а соответствующий логике А≥5 и обнуляющий - является вторым выходом пороговой схемы 79. При приходе первой последовательности с первого выхода пороговой схемы 79 поступает сигнал на управляющий вход первой группы вентилей 80 через которые коды τ, f, T, t и Пi последовательности записывается в регистр 83 формируемых целей как начало цели с параметрами τ, f, T, t, Пн=Пi, Пк=Пi, где Пн и Пк - соответственно значения пеленга начала и конца цели. Все новые последовательности через вторую группу вентилей 81 записываются в буферный регистр 86. Сигнал со второго выхода пороговой схемы 79 открывает и четвертую группу вентилей 85, через которые коды Пн из регистра 83 и код Пi из буферного регистра 86 поступают на входы СС по П 84, которая представляет собой последовательно соединенные вычитающую схему, входы которой являются входами СС по П 84, и схему сравнения, на второй вход которой поступает код θ, равный ширине диаграммы направленности антенны и прошит в ПЗУ констант. Выход схемы сравнения, соответствующий логике Пi-Пн≤θ, является первым выходом СС по П 84, а выход, соответствующий логике Пi-Пн>θ, является вторым выходом. Если Пi-Пн≤θ, то с первого выхода СС по П 84 поступает сигнал на управляющий вход третьей группы вентилей 82, через которые коды τ, f, T из буферного регистра 86 поступают на три первых входа схемы сравнения 87 по τ, f и T, на вторые три входа которой поступают соответствующие коды τ, f, T из регистра 83. При сравнении по всем параметрам с трех первых выходов схемы 87 на три входа схемы И 88 поступают сигналы, по приходу которых сигнал с выхода схемы И 88 открывает вентиль 94 и значение пеленга П последовательности из буферного регистра 86 поступает в регистр 83 и записывается как Пк - пеленг последовательности последней приписавшейся цели. Если не произошло сравнение хотя бы по одному из параметров ε, f, T в схеме 87 сравнения, то через любой из трех выходов через схему ИЛИ 89 на буферный регистр 86 выдается сигнал, по которому производится обнуление буферного регистра 86 (т.е. вновь принятая последовательность не принадлежит данной цели). Если в СС по П 84 П-Пн>θ, то считается, что цель сформирована и с ее второго выхода выдается сигнал, который увеличивает содержимое счетчика обнаружений 92 и через линию задержки 90 открывает пятую группу вентилей 91 и поступает в блок 6 определения пеленга, обеспечивая вывод параметров сформированной цели τ, f, t, T, Пн, Пк и П - количество обнаружений в блок 6 определения пеленга. Сигнал со второго выхода СС по П 84 через линию задержки 93 поступает для обнуления регистра 83 и счетчика 78.
Блок 6 определения пеленга решает задачу определения пеленга цели согласно выражению:
и содержит регистр, первую, вторую и третью группы вентилей, сумматор, регистр Пц и две линии задержки, при этом вход регистра является входом блока 6 определения пеленга, на который поступают коды параметров целей, а два его выхода соединены с двумя входами первой группы вентилей, третий вход которой и вход первой линии задержки является входом блока 6 определения пеленга, соединенным с выходом линии задержки 90 (см. фиг. 5), два выхода первой группы вентилей подключены к сумматору, выход которого через регистр Пц соединен с первым - информационным входом второй группы вентилей, второй - (управляющий) вход второй группы вентилей соединен с выходом первой линии задержки, а выход - со вторым входом регистра, третий выход которого соединен с третьей группой вентилей, управляемой сигналом с выхода второй линии задержки, выход третьей группы вентилей является выходом блока 6 определения пеленга, вход второй линии задержки соединен с выходом первой линии задержки.
Пеленги начала Пн и конца Пк последовательности с регистра через первую группу вентилей суммируются и делятся в сумматоре. С регистра Пц через вторую группу вентилей пеленг цели Пц заводится вновь в регистр, с которого через третью группу вентилей вместе с кодами параметров τ, f, T, t выводится в блок 9 вычислителя дальности, блок 10 экстраполяции координат и внешние устройства.
Датчик 8 углового положения антенны - двенадцатиразрядный преобразователь вал-код (см. Самсоненко ″Цифровые методы оптимальной обработки радиолокационной информации″, М., Военное издательство, 1968 г., стр. 108-115).
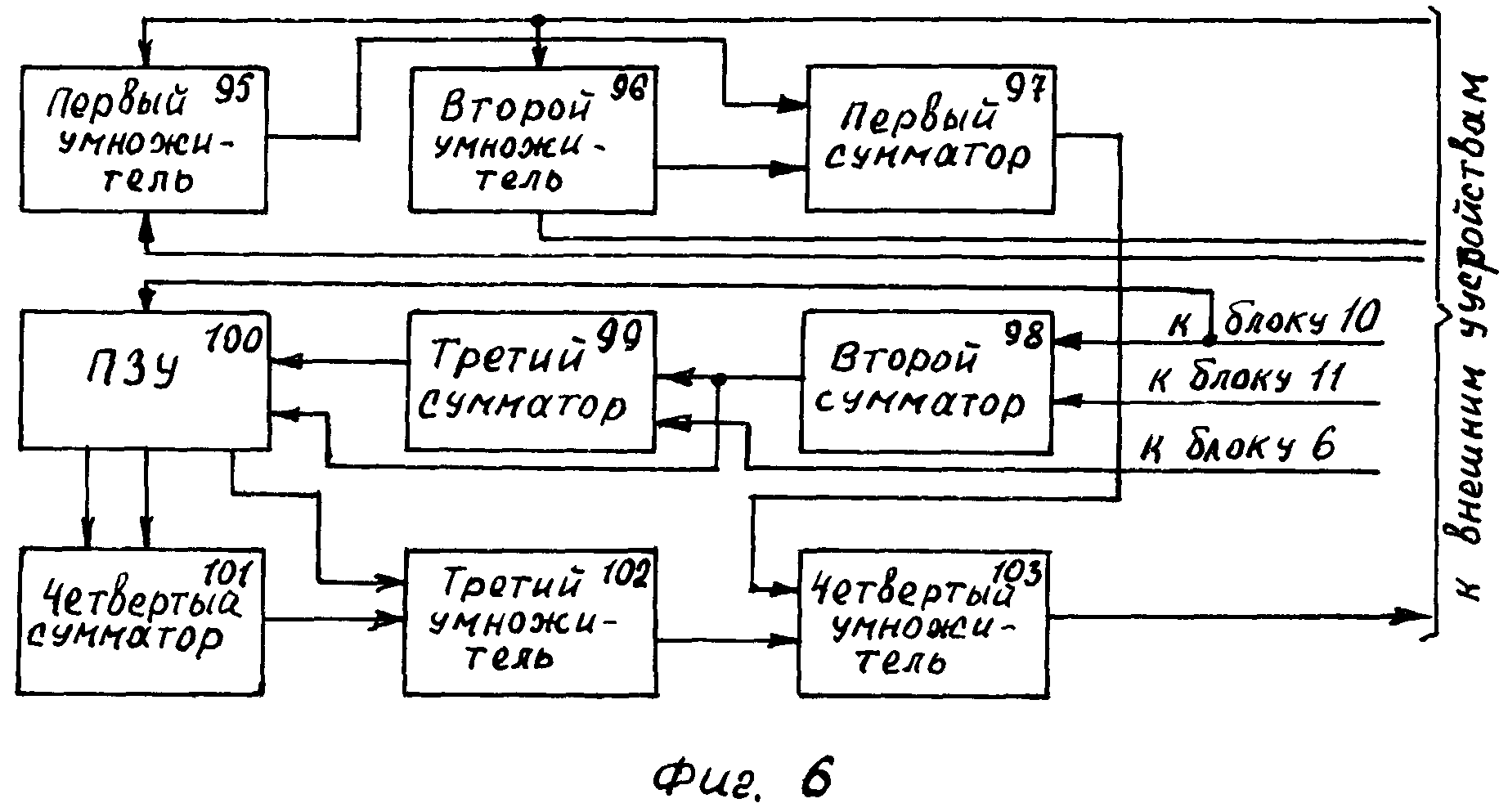
Блок вычислителя 9 дальности (см. фиг. 6) содержит первый 95 и второй 96 умножители, первые и объединенные вторые входы которых соединены с внешними устройствами, а выходы соединены со входами первого сумматора 97, содержит последовательно соединенные второй сумматор 98, третий сумматор 99 и постоянно-запоминающее устройство (ПЗУ) 100, при этом первый вход второго сумматора 98 соединен с выходом формирователя 11 угла разности галсов, второй вход второго сумматора и второй вход ПЗУ 100 соединены с выходом блока 10 экстраполяции координат, выход второго сумматора 98 соединен также с третьим входом ПЗУ 100, второй вход третьего сумматора 99 соединен с выходом блока 6 определения пеленга, первый и второй выходы ПЗУ 100 соединены с двумя входами четвертого сумматора 101, выход которого и третий выход ПЗУ 100 соединены с двумя входами третьего умножителя 102, выход третьего умножителя 102, а также выход первого сумматора 97, соединены с двумя входами четвертого умножителя 103, выход которого является выходом блока 9 вычислителя дальности, соединенным с внешними устройствами.
Блок вычислителя 9 дальности формирует сигнал дальности до источника излучения в результате выполнения совокупности операций, эквивалентной формуле
Значение базы измерения L определяется умножителями 95, 96 и первым сумматором 97 по формуле L=(Vпр+Vобр)T, где Vпр и Vобр - скорость носителя пассивной станции на прямом и обратном галсах соответственно, а T - время измерения. Время измерения на прямом и обратном галсах принимается одинаковым.
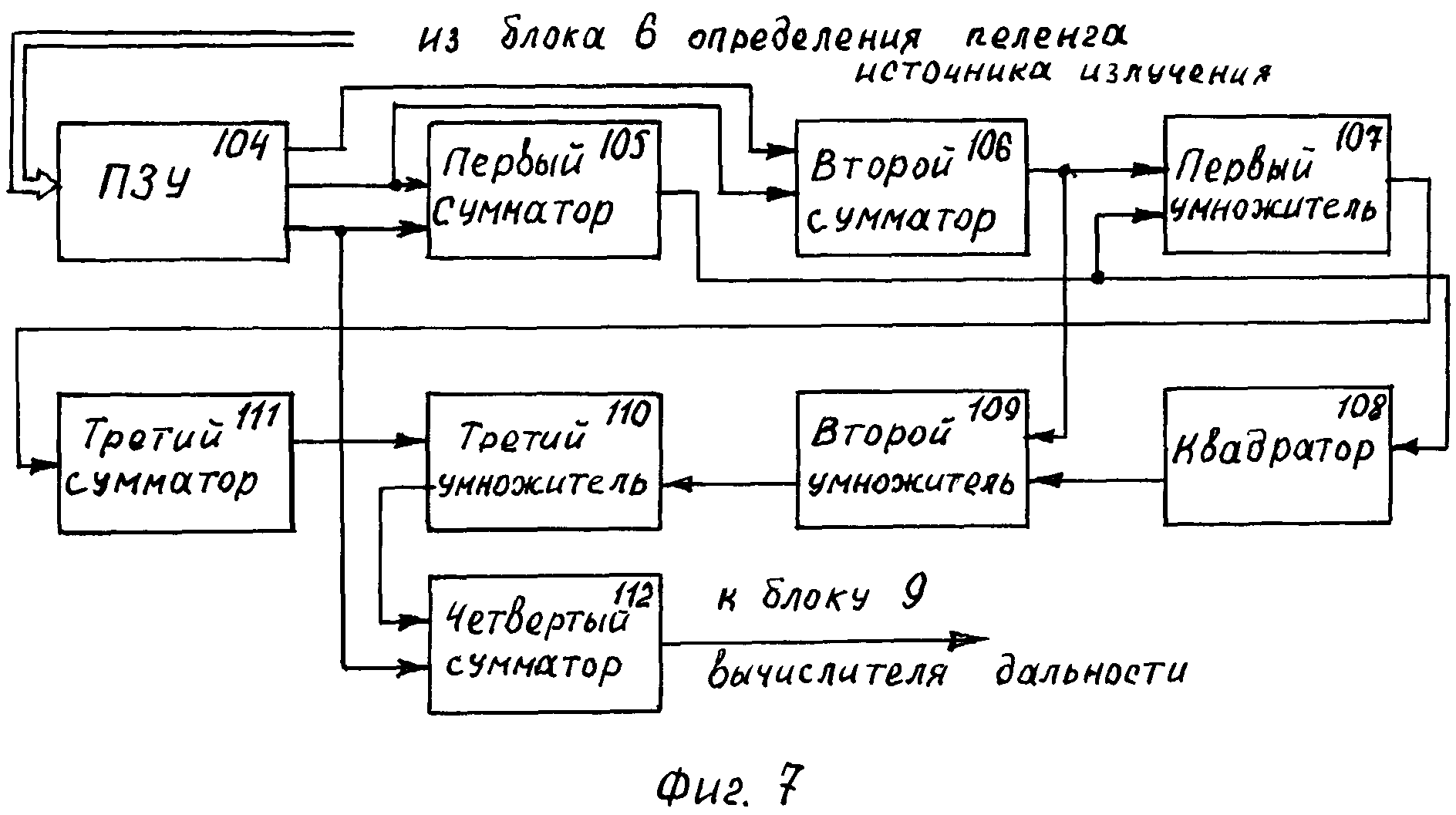
Значение синуса углов прошиты в памяти ПЗУ 100. Блок экстраполяции 10 координат (см. фиг. 7) содержит постоянно запоминающее устройство (ПЗУ) 104, первый 105 и второй 106 сумматоры, первые и объединенные вторые входы которых соединены с тремя выходами ПЗУ 104, а выходы соединены со входами первого умножителя 107, упомянутый выход первого сумматора 105 через квадратор 108 и упомянутый выход второго сумматора 106 соединены со входами второго умножителя 109, выход которого соединен с первым входом третьего умножителя 110, второй вход третьего умножителя через третий сумматор 111 соединен с выходом первого умножителя 107, а выход соединен с первым входом четвертого сумматора 112, второй вход которого соединен с первым входом первого сумматора 105, вход ПЗУ 104 является входом блока 10 экстраполяции координат, а выход четвертого сумматора 112 является выходом блока 10 экстраполятора координат.
Такое построение блока 10 экстраполяции координат позволяет находить экстраполированное значение пеленга источника излучения (ε′), отсчитанного относительно условно продолженной линии первого прямого галса в точке, по времени соответствующей моменту окончания второго (обратного) галса. Угол ε′ находится по трем известным углам α, β, γ источника излучения, отсчитанным относительно линии прямого галса в его начале, середине и конце по формуле
Формирователь 11 угла разности галсов представляет собой двухвходовой сумматор, на входы которого поступают коды курса носителя на прямом и обратном галсах.
Блок 3 кодирования, блок 4 выделения последовательностей сигналов, блок 5 идентификации, блок 6 определения пеленга источника излучения, блок вычислителя 9 дальности, блок экстраполяции 10 координат и формирователь 11 угла разности галсов выполнены на элементах, узлах и устройствах цифровой вычислительной техники. При их построении руководствовались следующими документами: ″Микросхемы интегральные полупроводниковые серии 130, 133, 136″; ″Руководство по применению серии 133КА0340001Д″.
Работает предлагаемая станция следующим образом. Антенна 1 осуществляет пространственный поиск в заданном секторе. Обнаруженные сигналы источника излучения поступают в приемник 2, в котором производится усиление сигнала, образование промежуточной частоты, детектирование и выработка дополнительных управляющих сигналов ″начало″, ″конец″, ″начало полосы″, ″конец полосы″, необходимых для преобразования параметров сигналов τ, f, t в двоичный код, которое производится в блоке 3 кодирования. Параметры каждого сигнала в двоичном коде из блока 3 кодирования поступают в блок 4 выделения последовательностей сигналов. В этом блоке на основе параметрического и временного методов селекции производится разделение сигналов по принадлежности к различным последовательностям (группам сигналов с одинаковыми значениями τ, f), a также с одинаковыми межимпульсными интервалами по времени, по которым производится оценка по времени T. Каждой последовательности (после объединения нескольких импульсов) присваивается значение пеленга.
После окончания последовательности (по двум пропускам подряд позиций, на которых должны быть сигналы) ее параметры τ, f, T, Пц, t в коде поступают в блок 5 идентификации, в котором с использованием параметрического метода идентификации происходит объединение последовательностей по принадлежности к различным разведываемым станциям. После сформирования цели (при выполнении условия П-Пц≥θ, где θ - ширина диаграммы направленности антенны 1) в блоке 6 определения пеленга вычисляется значение пеленга в соответствии с выражением
Полученные значения пеленга цели в начале и конце прямого галса и в конце обратного галса поступают в блок 10 экстраполяции координат, который формирует экстраполированное значение пеленга цели ε′ и выдает его в блок вычислителя 9 дальности. Вычисленное на конец обратного галса значение дальности источника излучения с выхода блока вычислителя 9 дальности поступает во внешние устройства индикации и управления комплекса целеуказания, в который входит заявляемая станция разведки.
Согласно приведенному описанию работы предлагаемой станции была разработана и испытана модель функционирования предлагаемой станции и станции-прототипа.
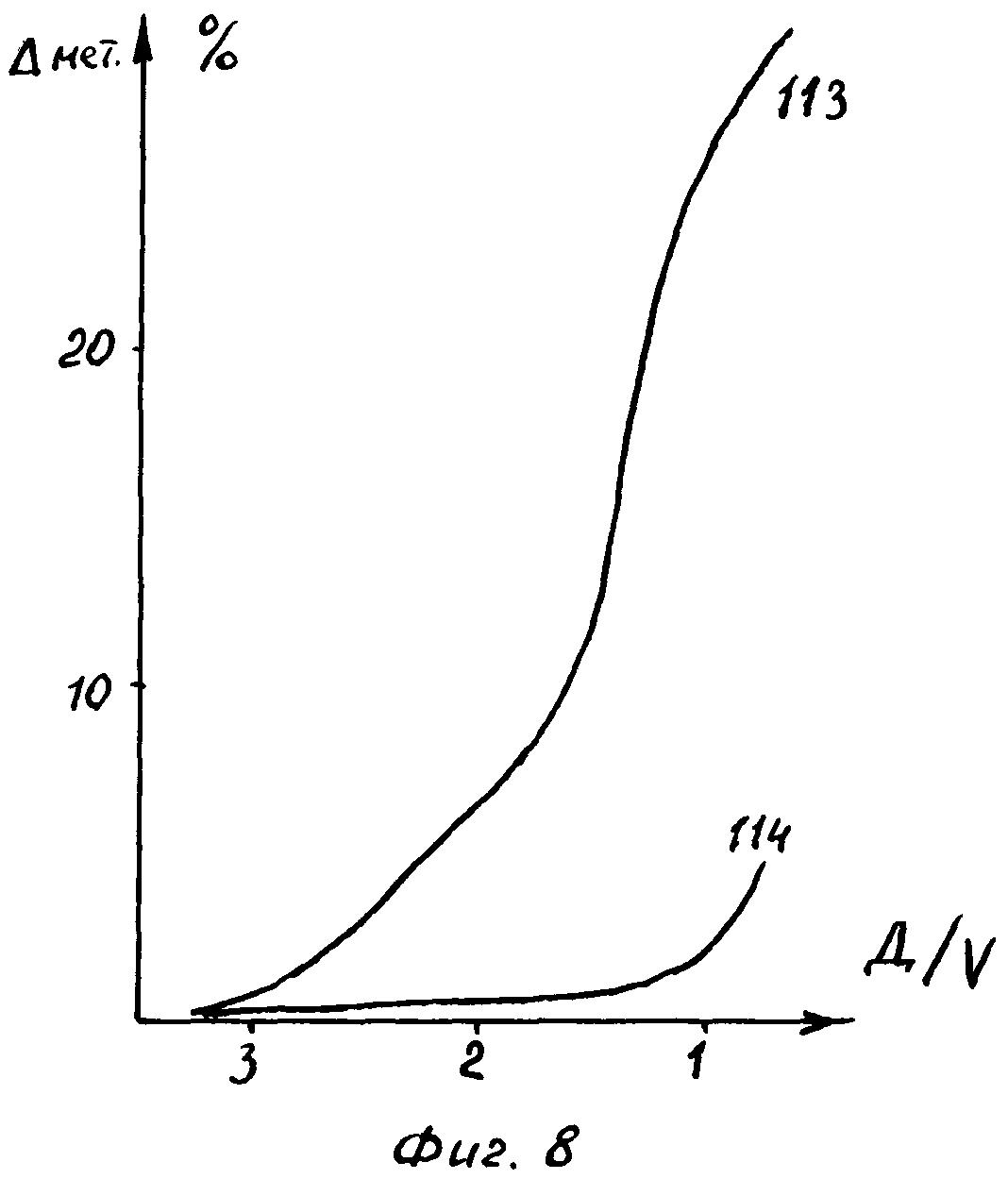
Оценка методической ошибки определения координат излучающей цели производилась для диапазона значений параметра Д/V от 0,75-3 при фиксированном времени разведки, что соответствует изменению скорости цели и носителя в 4 раза.
Излучающая цель перемещалась равномерно и прямолинейно, а носитель станции разведки совершал маневр перпендикулярно начальному пеленгу цели. По полученным данным построены зависимости (см. фиг. 8) ошибки определения дальности от приведенной величины Д/V для станции-прототипа (кривая 113) и предлагаемой станции (кривая 114). Из сравнения положения кривых следует, что в диапазоне значений Д/V, соответствующем большинству типичных ситуаций при ведении пассивной разведки надводных целей, находящихся в зоне ДТР (на дальностях свыше 100-12 км), с борта корабля, движущегося со скоростью около 25 узлов (Д/V≥2,7÷3) ошибки станции-прототипа и предлагаемой станции практически одинаковы.
При увеличении значения приведенной скорости ошибки станции-прототипа существенно возрастают, так, например, для диапазона значений 2≥Д/V≥1, что соответствует случаям ведения разведки воздушной или скоростной надводной цели с борта корабля на воздушной подушке, экраноплана или вертолета, ошибка определения дальности станцией-прототипом лежит в пределах 10÷20%, а для крайнего значения указанного диапазона достигает 25% от начальной дальности, в то время как для предлагаемой станции ошибка не превышает 2÷3%.
Таким образом, предлагаемая станция обеспечивает большую точность определения текущей дальности до движущейся цели, особенно при ведении разведки со скоростных носителей и при выработке целеуказания по скоростным целям.
Основной полезный технический эффект заключается в повышении точности определения текущей дальности до движущейся цели, причем, как видно из вышеприведенных данных и фиг. 8, в ряде ситуаций это повышение может быть весьма значительным (в 3÷5 и более раз).
Экономический эквивалент указанного технического эффекта, обуславливающего повышение точности целеуказания средствам поражения, и как следствие этого - сокращение расхода (наряда) ракет для поражения целей с заданной вероятностью, на данном этапе (эскизный проект) не определялся ввиду необходимости привлечения большого числа дополнительных данных, часть которых еще не определена с достаточной точностью. Заключение о целесообразности применения предложения в разрабатываемой аппаратуре сделано на основании установленных в результате расчетов и моделирования технического эффекта - повышения точности, которое в некоторых ситуациях оказывается, как отмечалось выше, весьма значительным.
По предложению разработана функциональная схема станции и электрические схемы дополнительно вводимых и изменяемых блоков (блока экстраполяции координат, формирователя угла разности галсов, блока вычислителя координат), приведено макетирование этих блоков, а также выполнены моделирование работы станции и расчетные оценки степени повышения точности определения дальности до цели по сравнению с прототипом.
Супергетеродинный приемник импульсных сигналов с поиском по частоте
Анализатор радиопомех
Устройство для обработки радиолокационной информации
Устройство определения координат и угловой скорости обзора направленных сканирующих излучателей
Устройство фазовой калибровки многоканального приемника
Устройство селекции сигналов
Устройство для временной идентификации последовательностей сигналов
Фазовый пеленгатор модулированных сигналов
Устройство декодирования фазоманипулированных сигналов
Радиолокационный маяк-ответчик

