Результат интеллектуальной деятельности: СИСТЕМА АСТРОВИЗИРОВАНИЯ
Вид РИД
Изобретение
Изобретение относится к астроинерциальным навигационным системам, в которых основная навигационная информация (счисляемые координаты и курс) корректируется по сигналам, поступающим с выхода астровизирующего устройства.
Известна система астровизирования, представленная на фиг. 1, реализованная в телеблоке АВ-1СМ, входящем в состав серийной астроинерциальной системы Л41, состоящая из телеблока 1, управляемого следящими системами 2, обеспечивающими его нацеливание в расчетную точку по целеуказаниям, выдаваемым из бортовой вычислительной машины (ЦВМ) 3. Выход телеблока 1 подключен к последовательно соединенным блоку обработки выходного сигнала телеблока 4 и блоку обнаружения визируемой звезды и определения ее координат 5.
В известной системе астровизирования блок обработки выходного сигнала телеблока 4 состоит из аналого-цифрового преобразователя (АЦП) 6, входом подключенного выходу телеблока 1, циклического счетчика 7, коммутатора 8, вход/выход которого подключен к первому входу/выходу счетчика 7, накопителя 9, состоящего из регистров, входом/выходом связанного со вторым входом/выходом счетчика 7, а выходом - со входом коммутатора 8, усилителя 10, входом связанного с выходом коммутатора 8, а выходом связанного с первым входом сумматора-накопителя 11, второй вход которого связан с первым выходом АЦП 6, а третий вход связан с выходом счетчика 7, связанного своим входом со вторым выходом АЦП 6.
Блок обнаружения визируемой звезды и определения ее координат 5 состоит из блоков сравнения 12, 13, 14, 15, 16, блока формирования логической переменной f 17, блока запоминания координат визируемой звезды 18, блока формирования логической переменной 20 и блока формирования признака обнаружения звезды 19. Первый блок сравнения 12 входом подключен к выходу сумматора-накопителя 11 блока обработки выходного сигнала телеблока 4, а первым выходом - к первому входу второго блока сравнения 13, выход которого подключен к входу третьего блока сравнения 14, выход которого подключен к входу блока запоминания координат визируемой звезды 18, выходом подключенному к входу блока формирования логической переменной 20. Второй выход первого блока сравнения 12 подключен к входу четвертого блока сравнения 15, первый выход которого подключен к входу пятого блока сравнения 16, выход которого подключен к входу блока формирования признака обнаружения звезды 19, а второй выход четвертого блока сравнения 15 подключен к входу блока формирования логической переменной 17.
Система работает следующим образом.
Выходной сигнал и телеблока 1, поступающий на вход АЦП 6, можно представить как суперпозицию шумовой составляющей, фоновой помехи и полезного сигнала от визируемой звезды при нахождении ее изображения в поле зрения телеблока.

где:
u - выходной сигнал телеблока,
uш - случайная составляющая, представляющая центрированный сигнал типа белый шум,
uф - фоновая помеха, которую можно считать постоянной величиной на временном этапе визирования звезды, но величина которой определяется внешними условиями, при которых производится визирование звезды,
uс - полезный сигнал от звезды при нахождении ее изображения в поле зрения телеблока, который с достаточной степенью точности можно аппроксимировать функцией с центральной точкой симметрии вида

где:
ρ - расстояние до центра кружка рассеяния,
σ - параметр, определяющий размеры кружка рассеяния.
Стандартным методом выделения полезного сигнала от звезды uс на фоне выходного сигнала телеблока, представленного в (1), является пороговый метод, заключающийся в том, что полезный сигнал от звезды фиксируется при превышении выходного сигнала телеблока порога u>L, где порог L представляет фиксированное значение, либо формируется по уровню фона при отсутствии звезды в поле зрения телеблока. Однако при наличии фоновой помехи, величина которой в сильной степени зависит от внешних условий визирования звезды, этот метод оказывается малоэффективным, а в ряде случаев вообще неприменимым. Поэтому главной задачей при решении задачи обнаружения звезды является задача компенсации фоновой помехи uф. Эта задача была решена на цифровом уровне вычислением свертки σs(t), представляющей интеграл произведения оцифрованного выходного сигнала телеблока на измерительный импульс c(t-τ).

где:
Т - интервал интегрирования,
t - текущее время,
х - переменная интегрирования,
dτ - шаг интегрирования.
Заменяя операцию интегрирования в (3) операцией суммирования с частотой f=1/τ, получаем

где:
i - номер текущего измерения,
N - общее количество измерений, фигурирующих в сумме (4),
uj - текущее значение выходного сигнала телеблока при проведении j-того измерения,
ci-j - текущее значение измерительного импульса.
При этом измерительный импульс выбирался таким, чтобы интеграл его произведения на константу на временном интервале Т был бы равен нулю, т.е. должен иметь осевую симметрию с осью симметрии, совпадающей с направлением сканирования (интегрирования), что обеспечивает полное исключение фоновой помехи при выполнении условия ее постоянства. В качестве измерительного импульса, удовлетворяющего этому условию, выбран меандр синусоидального сигнала Sin[2π/(t-τ)],

Численное интегрирование свертки сводится к вычислению суммы (4), которая представляет сумму N выходных сигналов телеблока, из которых в силу выбора измерительного импульса (5) первые N/2 сигналов суммируются со знаком плюс, а остальные N/2 сигналов суммируются со знаком минус

На следующем i+1-м цикле работы системы свертка σs(i+1) будет иметь вид:

Из (6), (7) можно записать вычисление as в итерационном виде. Пусть на i-том шаге работы системы имели сумму σs(i). Тогда на i-том шаге сумма σs(i+1) будет иметь вид:

Для построения схемы вычисления суммы σs(i) по (8) вводится накопитель 9, содержащий N регистров для хранения последних N оцифрованных выходных сигналов телеблока, циклический счетчик 7, меняющийся от единицы до N, и коммутатор 8. На i-том цикле работы системы оцифрованный АЦП 6 выходной сигнал телеблока подается на вход сумматора-накопителя 11, в коммутаторе 8 формируется номер К регистра накопителя 9, из которого считывается информация по логике
К=i-N/2, если i>N/2
K=i+N/2, если i≤N/2
и через коммутатор 8 и усилитель 10 с коэффициентом усиления -2 подается на другой вход сумматора-накопителя 11. На третий вход сумматора-накопителя 11 подается содержимое последнего N-ного регистра накопителя 9, в результате чего его содержимое as меняется в соответствии с (8) или, что эквивалентно, в соответствии с (7), после чего значение циклического счетчика 7 меняется по закону
i=i+1, если i<N
i=1, если i=N
Таким образом, блок обработки выходного сигнала телеблока, построенный по описанной схеме и обеспечивающий каждый раз суммирование N последних выходных сигналов телеблока по (7) (или итерационно по (8)), полностью компенсирует фоновую помеху при условии ее постоянства. Кроме того, суммирование N сигналов обеспечивает снижение уровня случайной помехи в N1/2 раз при условии ее некоррелированности, что повышает отношение сигнал/шум.
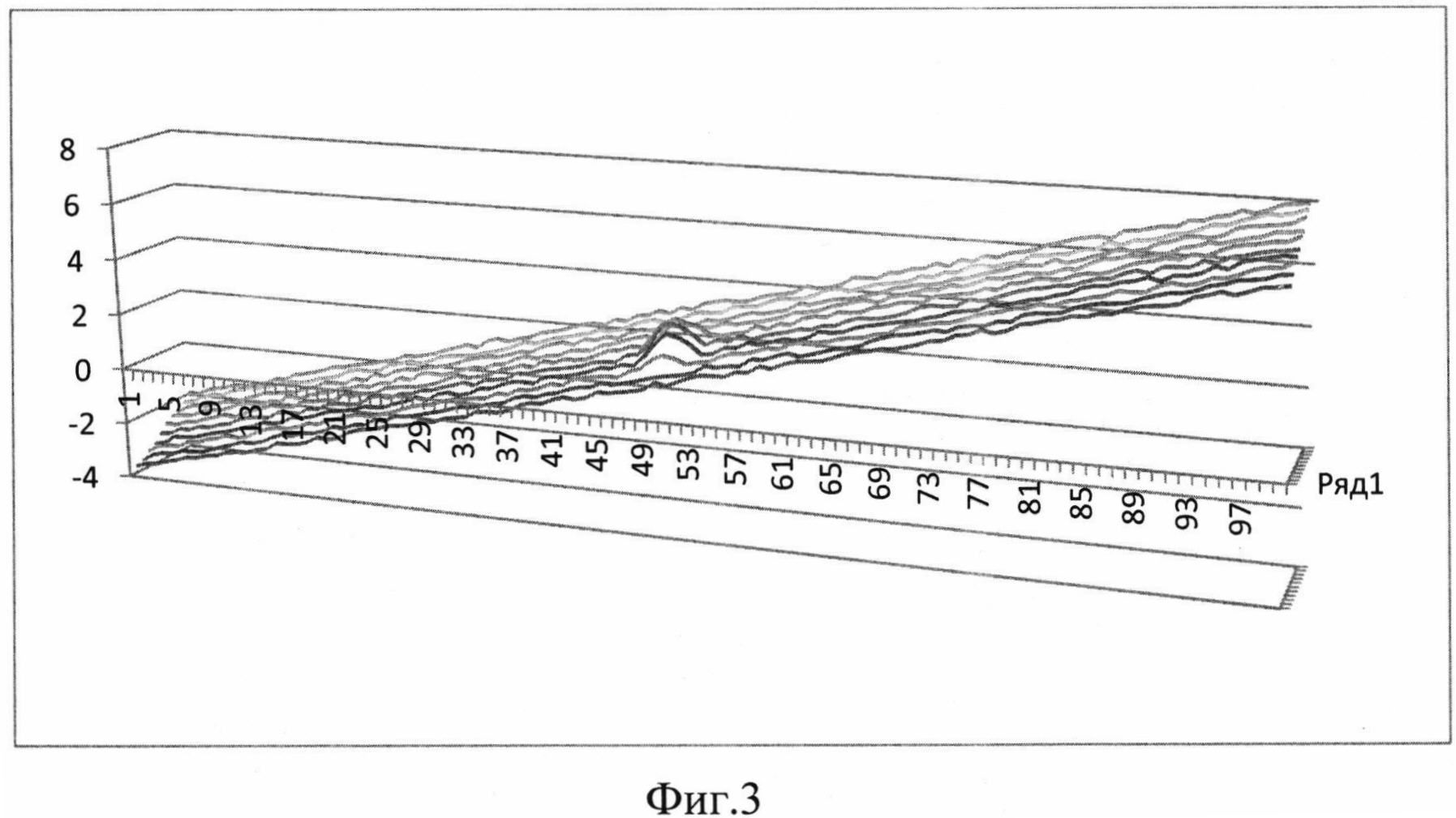
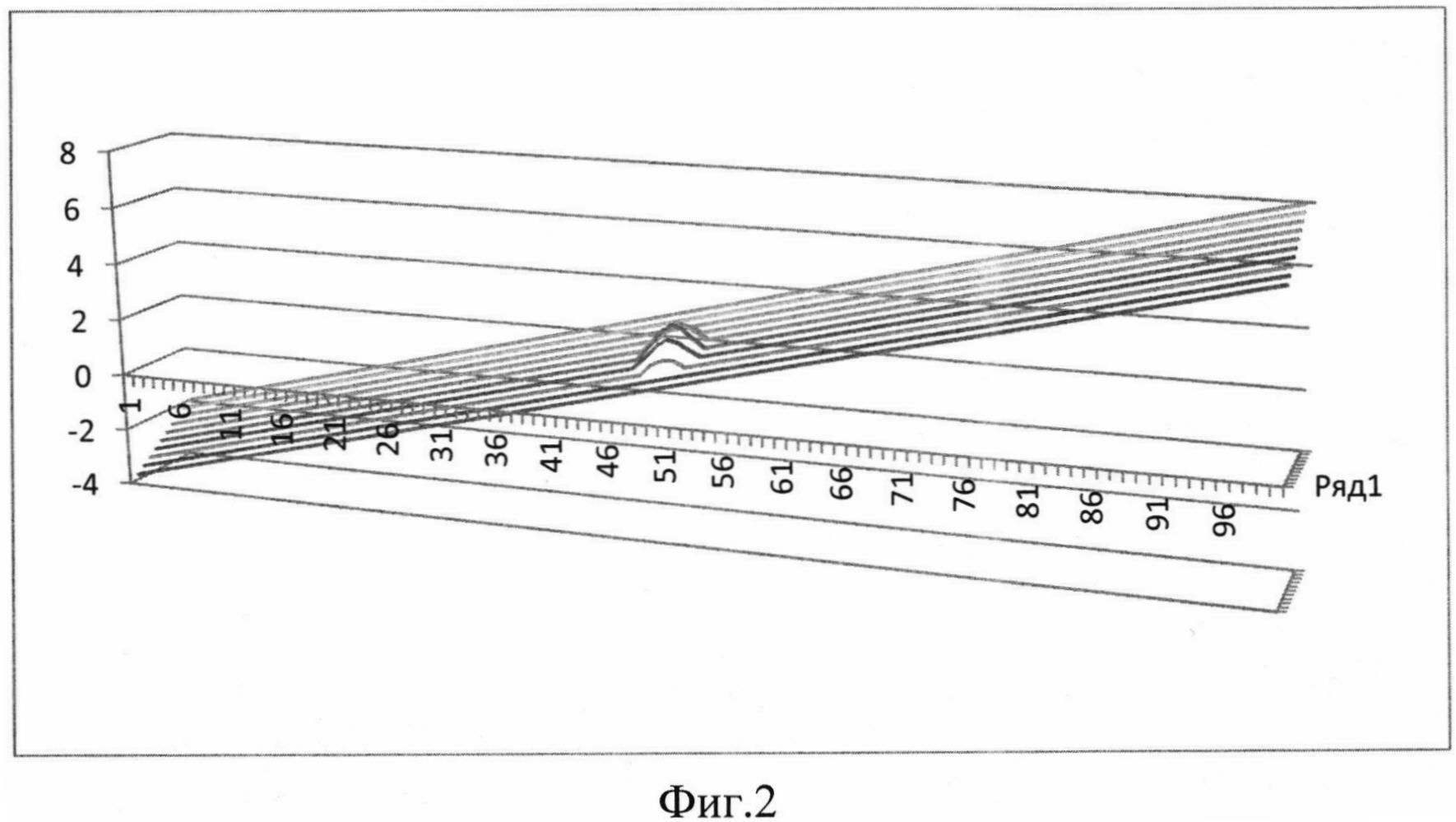
При прохождении изображения звезды через интервал суммирования по (7) на выходе сумматора-накопителя 11 будет сформирован разнополярный импульс, как это показано на фиг. 2, 3 (на фиг. 2 изображен сформированный разнополярный импульс при отсутствии случайной помехи uш=0, на фиг. 3 - сформированный разнополярный импульс при наличии случайной помехи  ), при этом момент (или точка) прохождения этого импульса через ноль совпадет с моментом совмещения максимального значения пятна рассеяния с центром интервала суммирования. Блок обнаружения визируемой звезды и определения ее координат представляет логическую структуру, задачей которой является определение этой точки. Поскольку при отсутствии полезного сигнала от звезды сумма as на выходе сумматора-накопителя 11 будет тождественно равна нулю или близка к этой величине при наличии случайной шумовой помехи, определение искомого нуля as строится по следующей схеме:
), при этом момент (или точка) прохождения этого импульса через ноль совпадет с моментом совмещения максимального значения пятна рассеяния с центром интервала суммирования. Блок обнаружения визируемой звезды и определения ее координат представляет логическую структуру, задачей которой является определение этой точки. Поскольку при отсутствии полезного сигнала от звезды сумма as на выходе сумматора-накопителя 11 будет тождественно равна нулю или близка к этой величине при наличии случайной шумовой помехи, определение искомого нуля as строится по следующей схеме:
- вводятся верхний и нижний фиксированные уровни порога ±L и последовательно проверяется выполнение условия σs>L. При выполнении этого условия ищется пара соседних значений таких, что σs>0, σs+1<0, т.е. пара точек, между которыми σs пересекала ноль. В качестве искомой точки может быть взята любая из точек σs либо σs+1. Строго говоря, точность определения искомой точки может быть повышена, если искомая точка будет определяться интерполированием между точками σs и σs+1. Однако практика показывает, что при достаточно высокой частоте работы рассматриваемой системы и при существующих инструментальных ошибках системы в целом уточнение нуля σs путем интерполирования не дает сколько-нибудь существенных результатов в плане повышения точности.
После определения искомой точки проверяется выполнение условия σs<-L, которое является подтверждением того, что завизирован точечный источник и определены его координаты. Проверка этого условия обеспечивает дополнительную защиту от ложных захватов источников протяженных сигналов, например таких, как край облака, подсвеченного Солнцем, при работе системы в дневных условиях, что обеспечивает дополнительную помехоустойчивость системы.
Компенсация возможных систематических ошибок при определении координат визируемой звезды достигается сканированием в прямом и обратном направлении и последующим вычислением среднеарифметического значения полученных результатов.
Блок обнаружения визируемой звезды и определения ее координат 5 в известной системе (фиг. 1) работает следующим образом.
В блоке сравнения 12 анализируется логическая переменная f, принимающая значение f=0 либо f=1. Исходное значение f=0. При f=0 анализируется блок сравнения 15, определяющий выполнение условия σs>L, и при выполнении этого условия в блоке 17 формируется логическая переменная f=1. При последующих циклах работы блока 5 анализируются два блока сравнения 13 и 14, определяющие выполнение условия σs>0, σs+1<0, т.е. прохождение выходной суммы as сумматора-накопителя 11 через ноль, и при выполнении этого условия в блоке 18 запоминается координата х′ визируемой звезды, а значение f устанавливается равным нулю. При последующих циклах работы блока 5 анализируется блок сравнения 16, определяющий выполнение условия σs<-L, и при выполнении этого условия в блоке 19 формируется признак обнаружения визируемой звезды и определения ее координат, т.е. завершения работы системы.
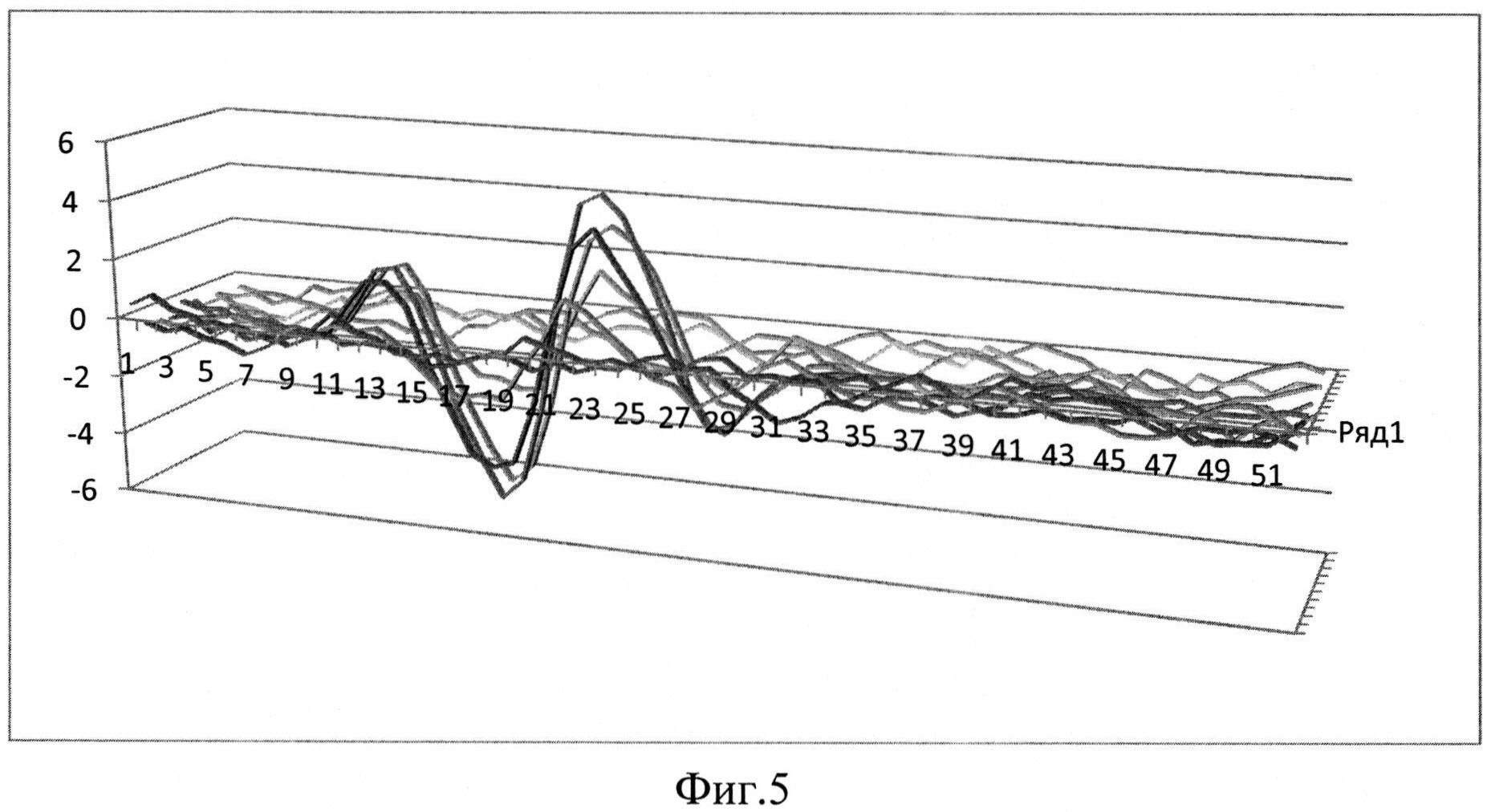
При использовании известных телеблоков с единственным чувствительным элементом и малым полем зрения поиск и визирование звезды проводились физическим сканированием визирной оси телеблока в некоторой заданной области небесного пространства с одновременной обработкой выходного сигнала телеблока по описанной схеме, при этом малое поле зрения телеблоков позволяло сделать допущение о постоянстве фоновой помехи. При использовании телеблока, построенного на ПЗС-матрицах, имеющих поле зрения порядка десятка угл. мин и более, экспонируется (фотографируется) целая область небесного пространства с последующим сканированием этой области, что значительно упрощает и ускоряет процедуру определения координат визируемой звезды. Но при наличии достаточно большого поля зрения роль градиента фоновой помехи, который может меняться в достаточно широких пределах, существенно возрастает. На фиг. 4 представлено в виде диаграммы изображение участка звездного неба и кружок рассеяния, полученный от изображения звезды при наличии градиента фоновой помехи и отсутствии шумовой помехи. На фиг. 5 представлено в виде диаграммы изображение того же участка звездного неба при наличии шумовой помехи при отношении шумовой помехи к амплитудному значению полезного сигнала, равном 0.2. Градиент фоновой помехи приводит к возникновению постоянной составляющей на выходе сумматора-накопителя 11, что делает решение задачи установки порога L весьма проблематичным.
Основное внимание заявленного изобретения направлено на решение такой задачи, как компенсация постоянной составляющей на выходе сумматора-накопителя 11, вызываемой градиентом фоновой помехи, что позволяет достичь такого технического результата, как повышение точности визирования звезды за счет компенсации градиента форовой помехи.
Технический результат достигается тем, что система астровизирования состоит из телеблока, управляемого следящими системами, обеспечивающими его нацеливание в расчетную точку по целеуказаниям, выдаваемым из бортовой вычислительной машины, выход которого подключен к последовательно соединенным блоку обработки выходного сигнала телеблока и блоку обнаружения визируемой звезды и определения ее координат, при этом блок обработки выходного сигнала телеблока состоит из аналого-цифрового преобразователя, входом соединенного с выходом телеблока, циклического счетчика, первого коммутатора, вход/выход которого соединен с первым входом/выходом циклического счетчика, накопителя, состоящего из регистров и соединенного входом/выходом со вторым входом/выходом циклического счетчика, а первым выходом со входом первого коммутатора, усилителя, входом соединенного с выходом первого коммутатора, а выходом с первым входом сумматора-накопителя, второй вход которого соединен с первым выходом аналого-цифрового преобразователя, а третий вход соединен с первым выходом циклического счетчика, соединенного своим входом со вторым выходом аналого-цифрового преобразователя, блок обнаружения визируемой звезды и определения ее координат состоит из блоков сравнения, блока запоминания координат звезды при прохождении выходного сигнала сумматора-накопителя блока обработки выходного сигнала телеблока через ноль, блока формирования логической переменной и блока формирования признака обнаружения звезды, при этом вход первого блока сравнения соединен с выходом сумматора-накопителя блока обработки выходного сигнала телеблока, первый выход соединен с последовательно соединенными вторым, третьим блоками сравнения посредством их первых входов и блоком запоминания координат звезды при прохождении выходного сигнала сумматора-накопителя блока обработки выходного сигнала телеблока через ноль, при этом, четвертый блок сравнения соединен первым выходом с первым входом пятого блока сравнения, а вторым выходом с блоком формирования логической переменной, причем согласно изобретению с целью повышения точности определения координат визируемой звезды в блок обработки выходного сигнала телеблока дополнительно введены второй коммутатор, первым входом соединенный со вторым выходом циклического счетчика, вторым входом соединенный со вторым выходом накопителя, а выходом соединенный с четвертым входом сумматора-накопителя, а в блоке обнаружения звезды и определения ее координат второй выход первого блока сравнения соединен со вторым входом пятого блока сравнения, первый вход четвертого блока сравнения соединен с выходом блока запоминания координат звезды при прохождении выходного сигнала сумматора-накопителя блока обработки выходного сигнала телеблока через ноль, а второй и третий входы соответственно со вторыми выходами второго и третьего блоков сравнения, а третий выход четвертого блока сравнения соединен с первым входом вновь введенного шестого блока сравнения, второй вход которого соединен с выходом пятого блока сравнения, а выход соединен со входом вновь введенного блока определения координат визируемой звезды, выход которого соединен со входом блока формирования признака обнаружения визируемой звезды.
Задача компенсации постоянной составляющей, вызываемой градиентом фоновой помехи в заявленном изобретении, решается соответствующим формированием измерительного импульса c(t-τ) свертки (3). Например, если в качестве измерительного импульса выбрать

то постоянная составляющая, порождаемая градиентом фоновой помехи, будет равна нулю. Действительно, подставляя в (3) линейную функцию u0+kτ в качестве входного сигнала и (9) в качестве измерительного импульса, получим

Представив, как и выше, свертку (10) в виде суммы

получим итерационное соотношение для вычисления (11)

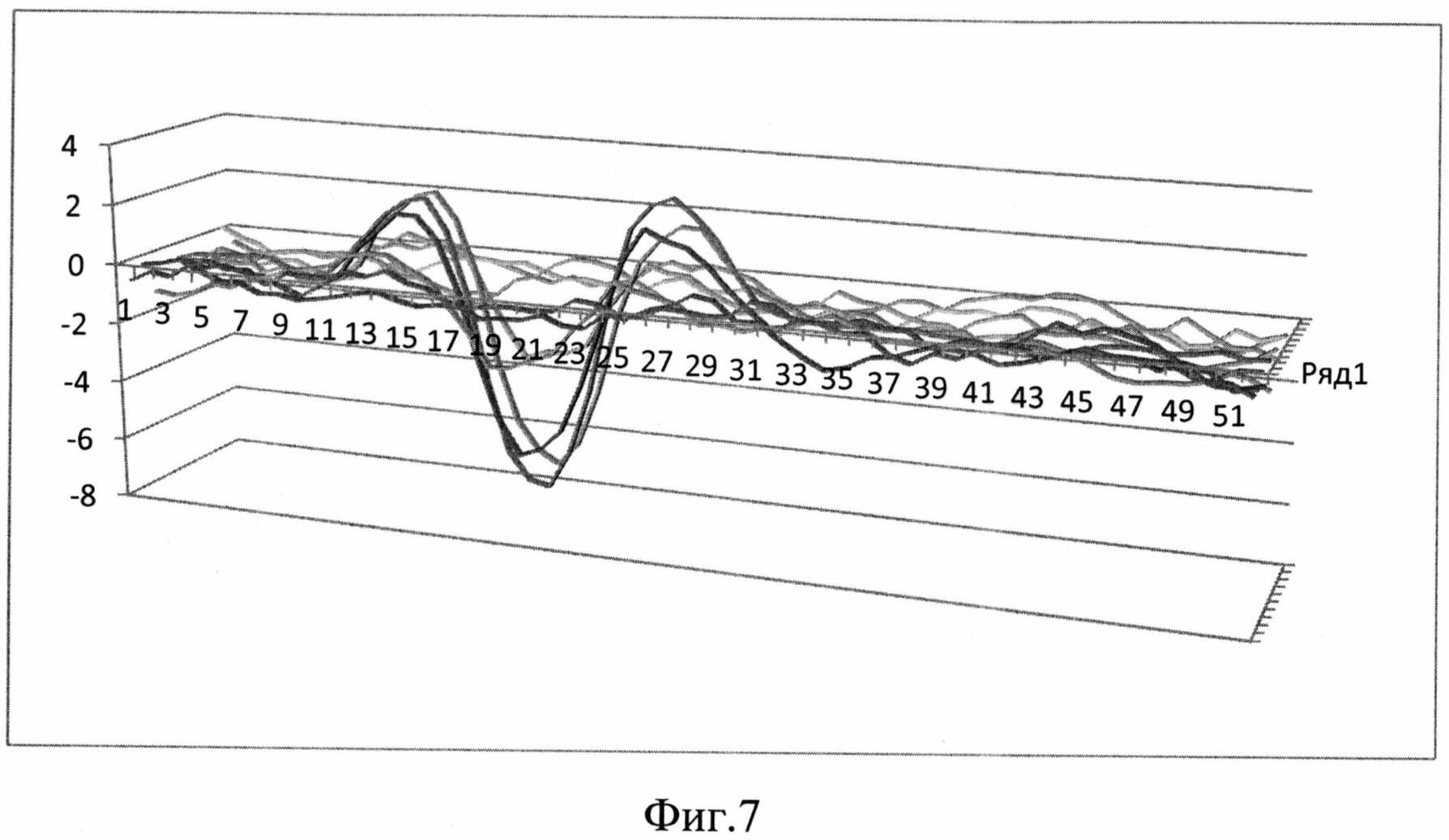
Для формирования суммы по (12), отличающейся от суммы (8) дополнительным слагаемым 2ur, блок обработки выходного сигнала телеблока, представленный на фиг. 1, дополняется вновь введенным коммутатором 22, первым входом подключенным ко второму выходу циклического счетчика 7, вторым входом ко второму входу накопителя 9, а выходом подключенным к четвертому входу сумматора-накопителя 11 (фиг. 6). При этом принцип работы схемы обработки выходного сигнала телеблока практически не меняется за исключением того, что добавляется дополнительный четвертый вход сумматора-накопителя и меняется логика формирования переменных коммутаторов (логика выборки регистров накопителя):
k=i-N/4, если i>N/4
k=i+3N/4, если i≤N/4
r=i-3N/4, если i>3N/4
r=i+N/4, если i≤3N/4
На фиг. 7 представлен (в виде диаграммы) результат вычисления по (12) свертки (10) с измерительным импульсом (9) при отношении полезного сигнала к шуму, равном 5. Как видно из приведенных результатов, постоянная, порождаемая градиентом фоновой помехи, практически (с точностью до случайной составляющей помехи) равна нулю, а на выходе сумматора-накопителя при прохождении через изображение звезды формируется импульс с тремя точками экстремума. Импульс достигает максимального значения, когда изображение звезды полностью симметрично интервалу суммирования. В связи с тем, что изменилась форма выходного сигнала сумматора-накопителя 11, меняется логика работы и схема блока обнаружения визируемой звезды и определения ее координат. Визируемая звезда считается обнаруженной, если выходной сигнал сумматора-накопителя 11 по своей абсолютной величине превысил некоторый заданный порог, а ее координаты определяются как среднее арифметическое координат двух ближайших к экстремальному значению сигнала σs точек, в которых значение этого сигнала будет равно нулю.
Задача решается подключением входа блока сравнения 15 блока обнаружения визируемой звезды и определения ее координат 5 к выходам блоков сравнения 13, 14 и блока запоминания координаты визируемой звезды 18. Выход блока сравнения 15 подключен, как и в известной схеме, к входу блока формирования логической переменной 17, и вводом дополнительных блока сравнения 23, вход которого подключен к выходу блока сравнения 16, а выход подключен к входу вновь введенного блока определения координат визируемой звезды 24, выход которого подключен к входу блока формирования признака обнаружения звезды 19.
Блок обнаружения визируемой звезды и определения ее координат работает следующим образом.
Работа блока начинается с анализа логической переменной f в блоке сравнения 12. При f=0 (исходное состояние логической переменной f) последовательно анализируются блоки сравнения 13 и 14, фиксирующие выполнение неравенств σs>0, σs+1<0, т.е. прохождение выходной суммы σs сумматора-накопителя 11 через ноль, и при выполнении этого условия в блоке 18 запоминается координата х′ визируемой звезды, после чего анализируется блок сравнения 15, определяющий выполнение условия  , и при выполнении этого условия в блоке 17 формируется логическая переменная f=1. Таким образом, в блоке 18 будет запомнена координата визируемой звезды, ближайшая к максимальному значению σs при которой σs=0. При f=1 анализируются блоки сравнения 16 и 23, аналогичные блокам 13, 14, и при выполнении условий σs>0, σs+1<0 (вторая точка, ближайшая к максимальному значению as в которой σs=0), в блоке 24 запоминается координата х′′ визируемой звезды и вычисляется истинная координата звезды как среднее арифметическое точек х′ и х′′
, и при выполнении этого условия в блоке 17 формируется логическая переменная f=1. Таким образом, в блоке 18 будет запомнена координата визируемой звезды, ближайшая к максимальному значению σs при которой σs=0. При f=1 анализируются блоки сравнения 16 и 23, аналогичные блокам 13, 14, и при выполнении условий σs>0, σs+1<0 (вторая точка, ближайшая к максимальному значению as в которой σs=0), в блоке 24 запоминается координата х′′ визируемой звезды и вычисляется истинная координата звезды как среднее арифметическое точек х′ и х′′
 ,
,
а в блоке 19 формируется признак обнаружения визируемой звезды и определения ее координат.
Система астровизирования, состоящая из телеблока, управляемого следящими системами, обеспечивающими его нацеливание в расчетную точку по целеуказаниям, выдаваемым из бортовой вычислительной машины, выход которого подключен к последовательно соединенным блоку обработки выходного сигнала телеблока и блоку обнаружения визируемой звезды и определения ее координат, при этом блок обработки выходного сигнала телеблока состоит из аналого-цифрового преобразователя, входом соединенного с выходом телеблока, циклического счетчика, первого коммутатора, вход/выход которого соединен с первым входом/выходом циклического счетчика, накопителя, состоящего из регистров и соединенного входом/выходом со вторым входом/выходом циклического счетчика, а первым выходом со входом первого коммутатора, усилителя, входом соединенного с выходом первого коммутатора, а выходом с первым входом сумматора-накопителя, второй вход которого соединен с первым выходом аналого-цифрового преобразователя, а третий вход соединен с первым выходом циклического счетчика, соединенного своим входом со вторым выходом аналого-цифрового преобразователя, блок обнаружения визируемой звезды и определения ее координат состоит из блоков сравнения, блока запоминания координат звезды при прохождении выходного сигнала сумматора-накопителя блока обработки выходного сигнала телеблока через ноль, блока формирования логической переменной и блока формирования признака обнаружения звезды, при этом вход первого блока сравнения соединен с выходом сумматора-накопителя блока обработки выходного сигнала телеблока, первый выход соединен с последовательно соединенными вторым, третьим блоками сравнения посредством их первых входов и блоком запоминания координат звезды при прохождении выходного сигнала сумматора-накопителя блока обработки выходного сигнала телеблока через ноль, при этом четвертый блок сравнения соединен первым выходом с первым входом пятого блока сравнения, а вторым выходом с блоком формирования логической переменной, отличающаяся тем, что с целью повышения точности определения координат визируемой звезды в блок обработки выходного сигнала телеблока дополнительно введены второй коммутатор, первым входом соединенный со вторым выходом циклического счетчика, вторым входом соединенный со вторым выходом накопителя, а выходом соединенный с четвертым входом сумматора-накопителя, а в блоке обнаружения звезды и определения ее координат второй выход первого блока сравнения соединен со вторым входом пятого блока сравнения, первый вход четвертого блока сравнения соединен с выходом блока запоминания координат звезды при прохождении выходного сигнала сумматора-накопителя блока обработки выходного сигнала телеблока через ноль, а второй и третий входы соответственно со вторыми выходами второго и третьего блоков сравнения, а третий выход четвертого блока сравнения соединен с первым входом вновь введенного шестого блока сравнения, второй вход которого соединен с выходом пятого блока сравнения, а выход соединен со входом вновь введенного блока определения координат визируемой звезды, выход которого соединен со входом блока формирования признака обнаружения визируемой звезды.
Система астровизирования
Способ первичной обработки выходной информации астровизирующего устройства
Способ прецизионной обработки сигналов лазерного гироскопа
Способ управления бесплатформенной гировертикалью и устройство для его реализации
Способ автоматического управления самолетом на посадке и система для его реализации
Способ повышения точности полезного сигнала кольцевого лазера
Способ управления самолетом при посадке
Способ астровизирования
Способ автоматического управления продольным движением самолета на посадке
Способ стабилизации заданной высоты полета
Система астровизирования
Способ первичной обработки выходной информации астровизирующего устройства
Способ прецизионной обработки сигналов лазерного гироскопа
Способ управления бесплатформенной гировертикалью и устройство для его реализации
Способ автоматического управления самолетом на посадке и система для его реализации
Способ повышения точности полезного сигнала кольцевого лазера
Способ управления самолетом при посадке
Способ астровизирования
Способ автоматического управления продольным движением самолета на посадке
Способ стабилизации заданной высоты полета

