Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ВСТРЕЧНОГО РАЗГОНА НЕЙТРАЛЬНЫХ МИКРОЧАСТИЦ
Вид РИД
Изобретение
Заявленное изобретение относится к устройствам для встречного разгона нейтральных микрочастиц и может найти применение для сталкивания, например, молекул или атомов, лишенных заряда при химических реакциях.
Известно устройство для разгона микрочастиц, описанное в патенте RU 2327877 С2, 20.08.2003, которое принципиально может быть использовано для встречного разгона микрочастиц.
Недостаток известного устройства для разгона и столкновения заключается в том, что разгоняемые частицы распределены по большому объему пространства, что снижает вероятность их столкновения.
Наиболее близким к предлагаемому устройству для встречного разгона микрочастиц, по мнению авторов, и принятым за прототип является устройство для ускорения, описанное в патенте RU №2579752, которое может быть использовано как составная часть ускорителя дл столкновения микрочастиц.
Его недостаток заключается в том, что скорость столкновения частиц ограничена.
Задачей данного изобретения является создание простых и удобных для применения в различных областях ускорителей, способных обеспечить высокую суммарную скорость нейтральных микрочастиц, например молекул или атомов, с высокой концентрацией, достаточной для протекания химических реакций.
Техническим результатом является повышение вероятности слияния участвующих в процессе столкновения микрочастиц и образование новых химических веществ при встречном их соударении.
Технический результат достигается за счет того, что в устройстве ускорителя для встречного разгона и столкновения нейтральных микрочастиц, содержащем систему управления и состоящем из коаксиально установленных с зазором и вращающихся относительно друг друга ротора и статора, выполненных так, что на входе ускорителя их диаметры больше, чем на выходе, на взаимообращенных поверхностях которых выполнены выступающие зубцы с винтовыми пазами, идущими в противоположном направлении между ротором и статором с расходящимся от входного к выходному отверстиям ускорителя шагом, с числом зубцов ротора, равным числу зубцов статора и непрерывным зазором между каждым из зубцов статора и ротора, с шириной наружной поверхности зубцов, выполненной в зависимости от угла α их взаимного пересечения равной:

где bi - ширина зубца в i-м сечении, bз - ширина зубца в основании ротора, di - диаметр ротора в i-м сечении, D - диаметр ротора в его широкой части, α - угол пересечения между зубцами статора и ротора в i-м сечении ускорителя, согласно изобретению устройство для встречного разгона состоит из двух ускорителей, направленных суженной стороной навстречу друг другу, причем в поперечном сечении выступающие зубцы выполнены в виде равнобедренной трапеции в расширенной части ротора и статора ускорителя и приближающимися к равнобедренному треугольнику в суженной его части.
Технический результат может быть достигнут за счет того, что ускоритель выполнен в виде двух половин однополосного гиперболоида вращения, направленных горловинами к его центру и соединенных между собой общим валом.
Технический результат может быть достигнут за счет того, что ускоритель выполнен в виде двух прямых круглого сечения конусов с вершинами, направленными навстречу друг к другу и переходящими в центре в цилиндры.
Технический результат может быть достигнут и за счет того, что в схеме управления установлен реактор с микроконтроллером и датчиком температуры.
Выполнение выступающих зубцов в виде равнобедренной трапеции в расширенной части ротора и статора ускорителя приближающимися к равнобедренному треугольнику в суженной его части позволяет упростить технологию изготовления ускорителя и повысить его прочность.
Выполнение ротора ускорителя в виде двух прямых круглого сечения конусов, переходящих в центре в цилиндры, способствует упрощению технологии изготовления.
Выполнение ускорителя в виде двух половин однополосного гиперболоида вращения, направленных горловинами к его центру и соединенных между собой общим валом, обеспечивает практически двойное увеличение скорости столкновения микрочастиц.
Применение микроконтроллера и датчиков температуры в схеме управления реактором упрощает работу оператора, контролирующего процесс работы.
Устройство для встречного разгона нейтральных микрочастиц иллюстрируется 8-ю фигурами.
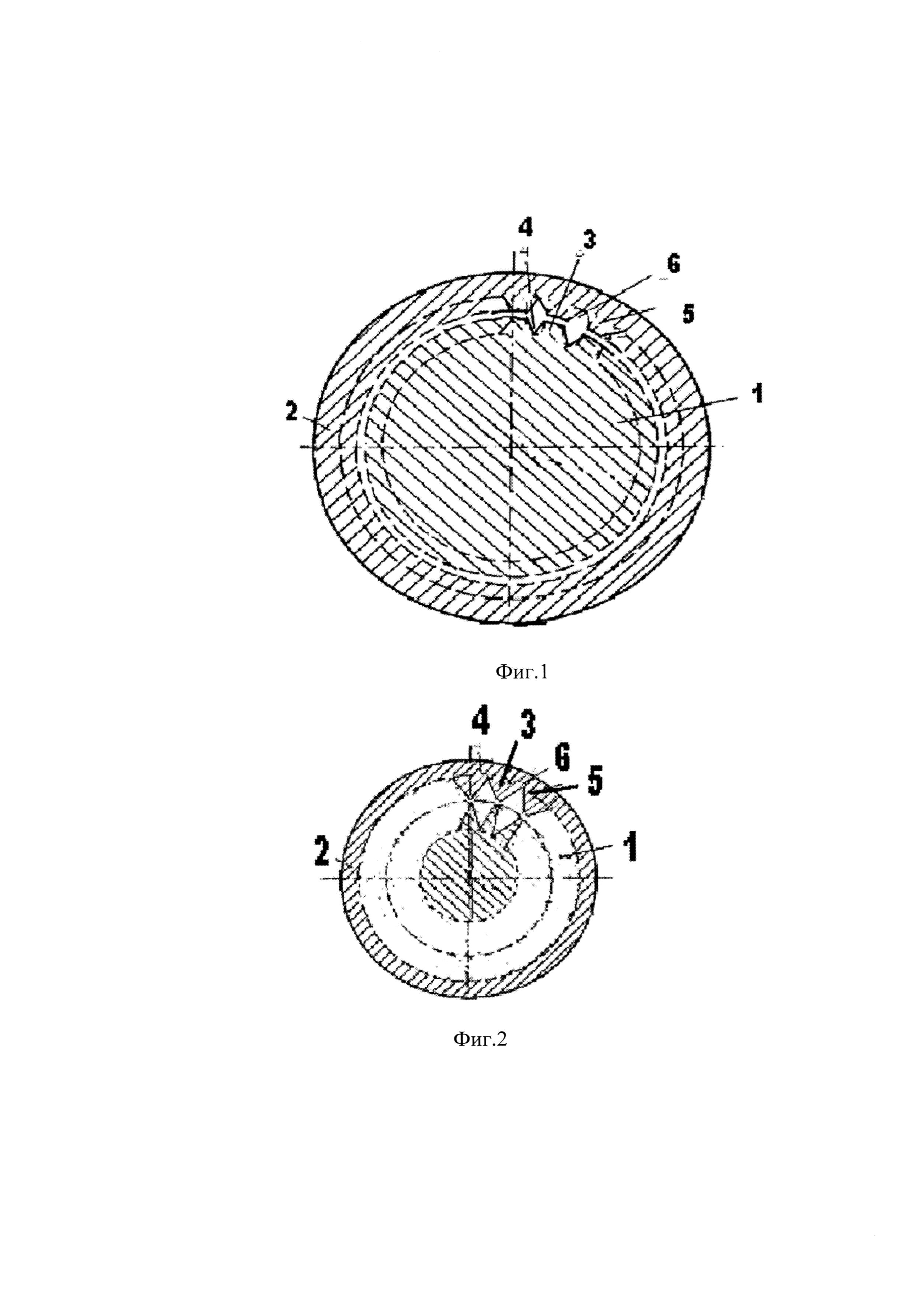
На фиг. 1 имеется вид ротора и статора ускорителя в поперечном разрезе в расширенной его части.
Фиг. 2 демонстрирует вид ротора и статора ускорителя в поперечном разрезе в той его части, где он сужен.
На фиг. 3 изображен ротор ускорителя из встречно направленных горловин однополосного гиперболоида.
На фиг. 4 имеется вид статора ускорителя, применительно к ротору, имеющегося на фиг. 3.
Фиг. 5 демонстрирует ускоритель в сборе с ротором ускорителя, выполненным из встречно направленных горловин однополосного гиперболоида.
На фиг. 6 показан ротор ускорителя в виде направленных навстречу друг к другу двух прямых круглого сечения конусов.
На фиг. 7 изображен статор ускорителя применительно к ротору, имеющемуся на фиг. 6.
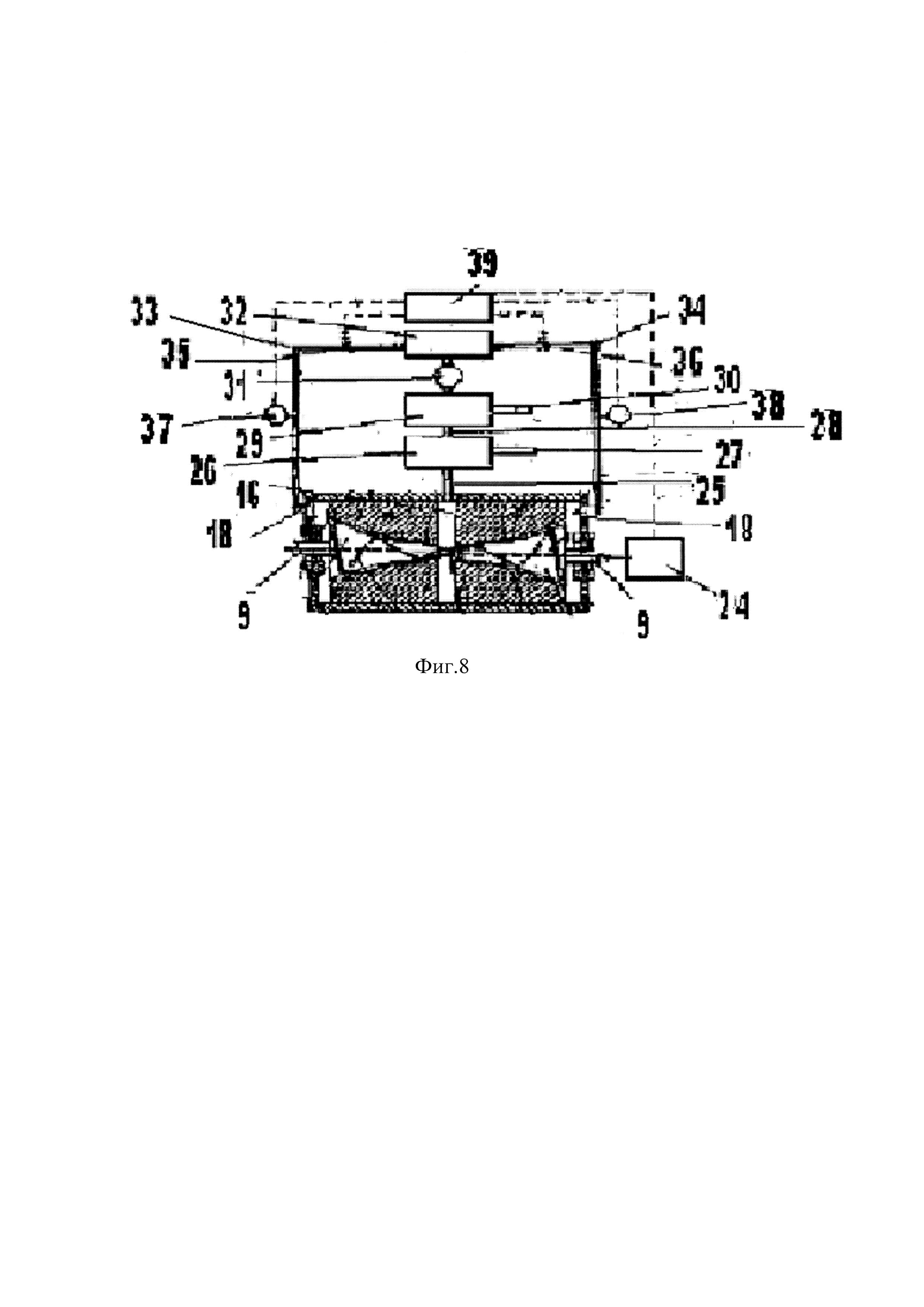
На фиг. 8 представлен ускоритель с реактором-регистратором процесса химической реакции.
Устройство для встречного разгона микрочастиц выполнено следующим образом. Ротор 1 (фиг. 1) расположен внутри статора 2 и имеет на своей поверхности выступающие зубцы 3, которые в профиль в расширенной его части выполнены в виде равнобедренной трапеции с пазами треугольной формы 4. В свою очередь статор 2 также имеет выступающие зубцы 5 в расширенной его части, выполненные в виде равнобедренной трапеции с пазами треугольной формы 6.
Зубцы в суженной части и ротора 1, и статора 2 (фиг. 2) приближаются к равнобедренному треугольнику с пазами 4 в виде равнобедренного треугольника. Статор также в суженной своей части имеет выступающие зубцы 5, выполненные в виде, близком к равнобедренному треугольнику с пазами треугольной формы 6. В продольном направлении зубцы 3 ротора проходят вдоль всей его внутренней поверхности и расположены по винтовой линии с переменным шагом, расходящимся от расширенной части ротора и статора. Шаг винтовой линии ротора при подходе к его суженной части приближается к бесконечности. Число зубцов статора равно числу зубцов ротора. Ширина зубцов статора и ротора в местах их взаимного противостояния в каждом поперечном сечении определяется из соотношения:

где bi - ширина зубца в i-том сечении, bз - ширина зубца в основании (расширенной части) ротора, di - диаметр ротора в i-том сечении, D - диаметр ротора в его основании, αi - угол наклона винтовой линии по отношению к линии, проходящей параллельно оси симметрии ротора или угол пересечения между зубцами статора и ротора в i-том сечении.
Ротор 1 ускорителя выполнен в виде двух половин 7 (фиг. 3) однополосного гиперболоида вращения, направленных горловинами к его центру и соединенных между собой общим валом 8. Роторы имеют выходные приводные валы 9.
Статор ускорителей состоит из двух цилиндрических труб 10 (фиг. 4), изготовленных, преимущественно из металла и расположенных на одной оси, внутри которых выполнены сквозные продольные пустоты, по форме совпадающие с ротором (на фиг. не обозначены) для установки ротора.
В свою очередь устройство для встречного разгона (УВР) состоит из двух ускорителей 11, 12 (фиг. 5), направленных суженной стороной навстречу друг другу. Каждый из ускорителей представляет собой половину ротора в виде гиперболоида со своим статором. Так, ускоритель 11 содержит половину 2 ротора 1 и статор 10. Ускоритель 12 содержит половину 3 ротора 1 и статор 10. Ускорители направлены суженной стороной (горловинами гиперболоидов) навстречу друг другу. Ротор 1 установлен с возможностью вращения коаксиально с минимальным зазором внутри статоров 10. Оба статора заключены в общую станину 13, в центре которой имеются окна 14 для связи с исследовательской аппаратурой (на фиг. не показана). Станина 13 неподвижна и может содержать лапы, наподобие лап электрических машин, для ее крепления к поверхности. С двух сторон ускорителя прикреплены щиты 15 и 16, в которых выполнены окна 17, 18 для подачи испытуемого материала, в качестве которого может быть жидкость или газ. Между станиной 13 и ротором 1 с двух сторон установлены подшипники 19 и 20.
В варианте технического решения ротор 1 ускорителя выполнен в виде двух прямых круглого сечения конусов 21 и 22 (фиг. 6), переходящих в центре в цилиндры соответственно 23, объединенные общим валом 4.
Статор для ротора, состоящего из конических конусов, изображен на фиг. 7 и выполнен аналогично фиг. 4 с той разницей, что он допускает возможность установки в нем конического ротора. Такой статор состоит из цилиндрических труб 24 с коническими пустотами (на фиг. не обозначены) расположенных на одной оси с ротором.
(УВР) с коническим ротором выполнено идентично (фиг. 5) и отличается только видом ротора в коническом исполнении. Каждый из ускорителей представляет собой половину ротора в виде конусов со своим статором (на фиг. не показан).
Ускоритель с реактором-регистратором процесса химической реакции (фиг. 8) содержит валы ротора 9, один из которых имеет механическую связь с внешним приводом (на фиг. 8 не показан). В системе имеется регулятор частоты вращения 24 электропривода. Окна 18 связаны шлангом 25 с реактором 26, в котором происходит анализ результатов реакции реагентов с последующей его утилизацией. Реактор 26 снабжен датчиком температуры и давления. Если реакция экзотермическая, то производится отбор тепловой энергии с последующей ее утилизацией через канал 27. Если реакция эндотермическая, в реактор подается тепло, например горячий воздух. Отработавшие в реакторе 26 продукты через шланг 28 поступают в фильтровальную камеру 29. Фильтровальная камера снабжена отводным шлангом 30 с ручным клапаном, необходимым для вывода отстоя (на фиг. не обозначен). После фильтровальной камеры очищенные от отходов продукты поступают в вакуумный насос 31 и после насоса подаются в пополняемую расходную емкость 32. В свою очередь, расходная емкость 32 двумя шлангами 33 и 34 соединена с отверстиями станины 18, расположенными с правой и левой ее сторон. В шланге 33 имеется электроуправляемый редукционный клапан 35. В шланге 34 имеется электроуправляемый редукционный клапан 36. Шланги снабжены также датчиками давления соответственно 37 и 38. Система управления сосредоточена в микроконтроллере 39, в который поступают сигналы от датчиков давления 37 и 38. В контроллер 39 также поступают сигналы о температуре в реакторе 27.
Устройство для встречного разгона микрочастиц действует следующим образом. От внешнего привода (на фиг. не показан) через один из валов 9 или через оба вместе приводят во вращение ротор 1, состоящий из половин 7 (если ротор гиперболоидный) или 21, 22 (если ротор конический). В зазор между неподвижными статорами 10 и половинами ротора 7 (или 21, 22)_ (фиг. 5) через окна 18 подают испытуемый материал: жидкость или газ или другие взвешенные микрочастицы. Этот материал проходят в зазоры, образованные зубцами 3 ротора и зубцами 5 статора. Локальные зазоры, сформированные между зубцами статора и ротора, будут при вращении ротора непрерывно с ускорением смещаться в сторону от начал ускорителя к его концам в суженной части. При этом движение микрочастиц будет формироваться двумя силами. Первая сила образуется за счет шнекового эффекта, при котором частицы, оказавшиеся в пазах, будут двигаться вдоль пазов. Вторая сила образуется за счет того, что частицы благодаря центробежным силам, попадают в зазор между зубцами ротора и статора в зоны взаимного пересечения зубцов и оказываются в гравитационной ловушке. Иными словами, микрочастицы образцов, попадающие в зазор между зубцами статора и ротора, взаимодействуют с зубцами по принципу взаимного притяжения согласно формуле:
где m1 - масса микроэлемента исследуемого материала и m2 - массы ротора и статора, которые взаимодействуют с частицами с силой Fi; R - расстояние между массами ротора и статора и отдельными микрочастицами, Yу=6,67384(80)⋅10-11 м3⋅с-2⋅кг-1, или Н⋅м2⋅кг-2, универсальная постоянная. Что касается расстояния R, то в предлагаемом ускорителе величина неопределенна, поскольку элементы материала находятся во взаимодействии с двумя движущимися параллельно массами, расположенными с двух сторон от микрочастиц, и это расстояние на практике может приближаться к нулю. Во всяком случае, R в сотни и тысячи раз меньше, чем если бы взаимодействие было односторонним.
Площадь зазора между зубцами статора и ротора зависит от угла «α» взаимного пересечения зубцов статора и ротора и диаметра ротора согласно формуле [1]. Максимальные размеры этой площади - на входах в УВР, где она равна b32 при α=90°. По мере перемещения микрочастиц эта площадь будет принимать вид удлиненного ромба. Площадь пересечения зубцов постоянно снижается, что приводит к увеличению концентрации микрочастиц на выходе ускорителя. По мере приближения микрочастиц к суженной части концентрация микрочастиц будет дополнительно увеличиваться обратно пропорционально соотношению квадратов диаметров d на выходе ускорителей к диаметру D их на входе согласно формуле 3.
Если шаг винтовых пазов статора и ротора на выходе ускорителей достаточно высок, то и скорость истечения микрочастиц будет достаточно высокой, при этом масса частиц будет определяться согласно формуле:

где m0 - масса частиц на входе каждого ускорителя, m - масса ускоренной частицы, V - скорость ускоренной частицы на выходе каждого из ускорителей, «с» - скорость света.
Согласно формуле [4] взаимодействие между частицами и зубцами ротора и статора по мере их ускорения и приближения к центру ускорителя будет усиливаться.
Скорость V микрочастиц можно регулировать путем изменения числа оборотов ротора. При этом сама скорость вращения ротора может быть относительно невелика, что позволит снизить шум и вибрацию. Скорость же V движения микрочастиц на выходе каждого из ускорителей определяется скоростью вращения ротора и выходным шагом винтовой поверхности согласно соотношению V=Р×n, где Р - шаг винта, n - число оборотов вала ротора. При этом шаг винта Р приближается к Р=V/n, где n - число оборотов вала ротора в секундах, V - скорость движения микрочастицы.
Очевидно, что скорость встречного движения частиц при их столкновении будет значительно выше, чем на выходе ускорителя, что скажется на результатах их взаимодействия.
В варианте технического решения, когда ротор ускорителя выполнен в виде двух прямых круглого сечения конусов 21, 22 (фиг. 6), переходящих в цилиндры 23. ускоритель действует по тому же принципу, что и при гиперболоидном роторе.
Сложность изготовления УВР заключается в том, что необходимо совместить два ускорителя, не нарушая зазор между статором и ротором, однако эта технологическая проблема решается с помощью современных средств. Большая скорость молекул или атомов, лишенных заряда, необходима для получения химических реакций. При этом энергия активации Еа- это та дополнительная энергия (к средней энергии Е сталкивающихся частиц), которая требуется, чтобы обеспечить химическую реакцию. Неупругое столкновение означает образование связи между молекулами с получением нового вещества, т.е. реакции слияния. Начальное и конечное состояние вещества в химической реакции разделены неким энергетическим барьером. Его величину обычно выражают в кДж на моль А (или на моль Б). Этот барьер называемый энергией активации реакции и обозначается символом Еа. Скорость столкновения молекул для обеспечения химических реакций на несколько порядков меньше скорости, требуемой для ядерного синтеза. Предлагаемый способ может быть применен, в частности, для образовании экзотермических реакций, например для холодного сжигания водорода при столкновении с атомами кислорода в соответствующей пропорции с выделением тепла.

Способ измерения резонансной частоты
Устройство для оценки экономической эффективности процесса управления сложными системами
Парафазный логический элемент
Радиоволновое устройство для обнаружения живых людей под завалами и за стенами зданий
Способ определения диаметра диэлектрического полого цилиндрического изделия
Способ определения наружного объема цилиндрического изделия
Индукторный электрогенератор с гибким статором
Способ получения электрической энергии в индукторном генераторе с гибким статором
Способ определения уровня жидкого металла в технологической емкости
Устройство для обезвоживания нефтепродукта путем выпаривания водяных капелек
Способ измерения резонансной частоты
Устройство для оценки экономической эффективности процесса управления сложными системами
Парафазный логический элемент
Радиоволновое устройство для обнаружения живых людей под завалами и за стенами зданий
Способ определения диаметра диэлектрического полого цилиндрического изделия
Способ определения наружного объема цилиндрического изделия
Индукторный электрогенератор с гибким статором
Способ получения электрической энергии в индукторном генераторе с гибким статором
Способ определения уровня жидкого металла в технологической емкости
Устройство для обезвоживания нефтепродукта путем выпаривания водяных капелек

