Результат интеллектуальной деятельности: ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области навигационного приборостроения летательных аппаратов и морских судов.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Одной из основных проблем на пути создания миниатюрной интегрированной системы ориентации и навигации, предназначенной преимущественно для малоразмерных авиационных и морских объектов на базе бескарданного инерциального измерительного модуля, содержащего измерительный блок низкого уровня точности, например на волоконно-оптических гироскопах или микромеханических датчиках, и приёмной аппаратуры спутниковых навигационных систем, является проблема обеспечения требований по точности выработки курса.
Здесь и далее под малоразмерными объектами понимаются обитаемые и беспилотные (управляемые дистанционно или по заранее заданному алгоритму действий) речные и морские суда валовой вместимостью до 500 тонн, а также беспилотные летательные аппараты.
Проблему обеспечения требований по курсу в интегрированной системе ориентации и навигации с бескарданным инерциальным измерительным модулем низкого уровня точности в последнее время пытаются решить, в частности, за счёт создания для подвижных объектов приёмной аппаратуры спутниковых навигационных систем с фазовыми измерениями от разнесённых на определенном расстоянии приёмных антенн (антенной базе).
Это новое направление в морском и авиационном приборостроении связано с разработкой так называемых GPS-компасов (спутниковых компасов), использующих в своем составе инерциальный измерительный модуль.
Способы определения параметров ориентации объекта, основанные на использовании в приёмной аппаратуре спутниковых навигационных систем фазовых измерений с разнесённых антенн, приведены в описании семейства отечественной мультиантенной приёмной аппаратуры спутниковых навигационных систем МРК [1], а также в [2, 3, 4, 5].
В известных схемах построения интегрированной системы ориентации и навигации, например, описанных в [6, 7, 8, 9], как совместно с бескарданным инерциальным измерительным модулем, так и без него, для определения параметров ориентации объекта используется мультиантенная приёмная аппаратура спутниковой навигационной системы с фазовыми измерениями, обеспечивающая с определенной дискретностью автономную выработку параметров ориентации объекта.
Задача определения ориентации объекта с использованием фазовых измерений, как известно, требует решения проблемы неоднозначности фазовых измерений, т.к. антенная база в приведенных системах составляет от 0,7 м до 1,5 м, что существенно больше длины волны несущей сигнала СНС составляющей порядка 0,19 м. В существующих схемах построения систем ориентации, использующих фазовые измерения, применение достаточно длинных (1 м и более) антенных баз обусловлено необходимостью достижения заданного уровня точности выработки параметров ориентации. Так, для большинства известных систем характерен уровень точности порядка 0,5° при длине антенной базы, равной 1 м.
Известны различные способы решения данной проблемы [10]. Все они требуют одновременного наблюдения и обработки фазовых измерений от группировки навигационных спутников ( ), достаточно сложного программного обеспечения и существенной задержки времени при выработке первого определения курса объекта.
), достаточно сложного программного обеспечения и существенной задержки времени при выработке первого определения курса объекта.
Совместная обработка данных бескарданного инерциального измерительного модуля и приёмной аппаратуры спутниковой навигационной системы в рассматриваемых схемах построения интегрированной системы ориентации и навигации производится, как правило, на уровне параметров ориентации.
В патенте [11] описывается интегрированная система ориентации и навигации для морских объектов.
Устройство, описанное в [11], выбрано в качестве ближайшего аналога (прототипа) заявляемого устройства.
Интегрированная система ориентации и навигации, принятая за прототип, содержит миниатюрную приёмную аппаратуру спутниковой навигационной системы, включающую антенный модуль с двумя или более антеннами, причём опорная антенна расположена на максимально возможном отстоянии от центра масс объекта, ограниченном размерами объекта; бескарданный инерциальный измерительный модуль; измерительный блок с гироскопами, акселерометрами и обеспечивающей электроникой; вычислитель бескарданного инерциального измерительного модуля; блок вычисления параметров ориентации объекта; блок вычисления навигационных параметров объекта; блок комплексной обработки информации; блок формирования и разрешения неоднозначности разностных фазовых измерений.
Отличительной особенностью прототипа является формирование и обработка в фильтре Калмана интегрированной системы ориентации и навигации разностных фазовых измерений, а также используемый оригинальный способ исключения неоднозначности указанных измерений. Эти измерения представляют собой разность расчётных (формируемых с использованием данных бескарданного инерциального измерительного модуля) и измеренных (формируемых по данным приёмной аппаратуры спутниковой навигационной системы) вторых разностей фазовых измерений от одной или нескольких пар .
В прототипе выходные данные измерительного блока бескарданного инерциального измерительного модуля ( и
и  ) поступают в вычислитель бескарданного инерциального измерительного модуля. В блоке вычисления параметров ориентации решается задача ориентации и вычисляются параметры ориентации измерительного блока, которые и являются параметрами ориентации объекта с точностью до погрешностей привязки осей измерительного блока
) поступают в вычислитель бескарданного инерциального измерительного модуля. В блоке вычисления параметров ориентации решается задача ориентации и вычисляются параметры ориентации измерительного блока, которые и являются параметрами ориентации объекта с точностью до погрешностей привязки осей измерительного блока  к осям объекта
к осям объекта  . В блоке вычисления навигационных параметров решается навигационная задача, т.е. вычисление составляющих вектора линейной скорости и координат местоположения объекта – навигационных параметров.
. В блоке вычисления навигационных параметров решается навигационная задача, т.е. вычисление составляющих вектора линейной скорости и координат местоположения объекта – навигационных параметров.
Выходными данными приёмной аппаратуры спутниковой навигационной системы являются:  ,
,  ,
,  ,
,  ,
,  . Эти данные также поступают в вычислитель бескарданного инерциального измерительного модуля соответственно в блоки разрешения неоднозначности разностных фазовых измерений и комплексной обработки информации, где осуществляется совместная обработка информации бескарданного инерциального измерительного модуля и приёмной аппаратуры спутниковой навигационной системы, т.е. формирование и разрешение неоднозначности разностных фазовых измерений для их вторых разностей, а также формирование разностных измерений по первичным навигационным параметрам. Затем в блоке комплексной обработки информации осуществляется обработка разностных измерений с использованием алгоритма фильтра Калмана. По оценкам, полученным на выходе фильтра Калмана, в обратной связи осуществляется коррекция погрешностей бескарданного инерциального измерительного модуля как по параметрам ориентации, так и по навигационным параметрам и дрейфам гироскопов, а также коррекция погрешностей разностных фазовых измерений, формируемых в блоке разрешения неоднозначности разностных фазовых измерений.
. Эти данные также поступают в вычислитель бескарданного инерциального измерительного модуля соответственно в блоки разрешения неоднозначности разностных фазовых измерений и комплексной обработки информации, где осуществляется совместная обработка информации бескарданного инерциального измерительного модуля и приёмной аппаратуры спутниковой навигационной системы, т.е. формирование и разрешение неоднозначности разностных фазовых измерений для их вторых разностей, а также формирование разностных измерений по первичным навигационным параметрам. Затем в блоке комплексной обработки информации осуществляется обработка разностных измерений с использованием алгоритма фильтра Калмана. По оценкам, полученным на выходе фильтра Калмана, в обратной связи осуществляется коррекция погрешностей бескарданного инерциального измерительного модуля как по параметрам ориентации, так и по навигационным параметрам и дрейфам гироскопов, а также коррекция погрешностей разностных фазовых измерений, формируемых в блоке разрешения неоднозначности разностных фазовых измерений.
При этом антенный модуль приёмной аппаратуры спутниковой навигационной системы конструктивно никак не связан с измерительным блоком бескарданного инерциального измерительного модуля, он расположен в осях объекта.
К недостаткам прототипа следует отнести необходимость использования антенной базы длиной не менее 1 м с целью обеспечения точности выработки угла курса порядка 0,5° (P=0,997) и использование сигналов только одной глобальной спутниковой навигационной системы (ГНСС): GPS с кодовым разделением сигналов. Для уточнения всех параметров ориентации необходимо использование как минимум одной антенной базы (длиной 1 м и более) с двумя антеннами и двух (или одного специализированного, позволяющего одновременно подключать несколько антенн) приёмников спутниковой навигационной системы. Это неизбежно приводит к значительным массогабаритным характеристикам и увеличению стоимости системы. Кроме того, при такой схеме построения интегрированной системы ориентации и навигации затруднено оценивание всех инструментальных погрешностей измерительного блока бескарданного инерциального измерительного модуля, в частности дрейфов акселерометров и погрешности масштабного коэффициента гироскопа, установленного по оси  , ортогональной плоскости палубы, приводящих к росту погрешностей интегрированной системы ориентации и навигации в выработке параметров ориентации, что особенно актуально при построении интегрированной системы ориентации и навигации на измерительном блоке низкой точности.
, ортогональной плоскости палубы, приводящих к росту погрешностей интегрированной системы ориентации и навигации в выработке параметров ориентации, что особенно актуально при построении интегрированной системы ориентации и навигации на измерительном блоке низкой точности.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей изобретения является повышение точности и минимизация массогабаритных характеристик интегрированной системы ориентации и навигации, содержащей миниатюрный бескарданный инерциальный измерительный модуль и приёмную аппаратуру спутниковых навигационных систем с фазовыми измерениями и разнесёнными антеннами.
Поставленная задача решается в предложенной интегрированной инерциально-спутниковой системе ориентации и навигации, содержащей бескарданный инерциальный измерительный модуль, включающий в себя измерительный блок с, по меньшей мере, тремя гироскопами и, по меньшей мере, тремя акселерометрами и вычислителем, включающим в себя блок выработки параметров ориентации, блок выработки навигационных параметров, блок комплексной обработки информации, блок формирования и разрешения неоднозначности разностных фазовых измерений, а также содержащей приёмную аппаратуру спутниковых навигационных систем (как с кодовым, так и с частотным разделением сигналов навигационных спутников), включающую в себя антенный модуль, содержащий, по меньшей мере, две антенны, разнесённые на соответствующей антенной базе,
при этом блок формирования и разрешения неоднозначности разностных фазовых измерений выполнен с возможностью формирования разностных фазовых измерений вторых разностей фаз и разрешения их неоднозначности, обработки информации, поступающей от блока выработки параметров ориентации, блока выработки навигационных параметров, блока комплексной обработки информации, приёмной аппаратуры спутниковых навигационных систем,
при этом блок комплексной обработки информации выполнен с возможностью формирования разностных измерений по навигационным параметрам, обработки информации, поступающей от блока выработки навигационных параметров, блока формирования и разрешения неоднозначности разностных фазовых измерений и приёмной аппаратуры спутниковых навигационных систем,
при этом измерительный блок выполнен с возможностью передачи информации о составляющих угловой скорости объекта на вход блока выработки параметров ориентации, информации о составляющих линейного ускорения объекта на вход блока выработки навигационных параметров,
блок выработки параметров ориентации выполнен с возможностью передачи информации о параметрах ориентации в блок выработки навигационных параметров и в блок формирования и разрешения неоднозначности разностных фазовых измерений,
блок выработки навигационных параметров выполнен с возможностью передачи информации о координатах места и составляющих линейной скорости движения объекта в блок комплексной обработки информации и блок формирования и разрешения неоднозначности разностных фазовых измерений,
блок комплексной обработки информации выполнен с возможностью передачи информации
- об оценках погрешностей параметров ориентации измерительного блока бескарданного инерциального измерительного модуля в блок выработки параметров ориентации,
– об оценках дрейфов гироскопов в блок выработки параметров ориентации,
– об оценках погрешностей координат места измерительного блока бескарданного инерциального измерительного модуля и погрешностей составляющих линейной скорости движения объекта в блок выработки навигационных параметров,
– об оценках погрешностей разностных фазовых измерений вторых разностей фаз в блок формирования и разрешения неоднозначности разностных фазовых измерений
и с возможностью приёма и обработки информации о координатах места и составляющих линейной скорости движения объекта от блока выработки навигационных параметров, об измеренных значениях навигационных параметров, поступающих от приёмной аппаратуры спутниковых навигационных систем, об измеренных значениях вторых разностей фаз сигналов навигационных спутников, поступающих от блока формирования и разрешения неоднозначности разностных фазовых измерений,
блок формирования и разрешения неоднозначности разностных фазовых измерений выполнен с возможностью передачи информации о разностных фазовых измерениях вторых разностей фаз в блок комплексной обработки информации и с возможностью приёма и обработки информации
– о полных разностях фаз сигналов навигационных спутников, координатах навигационных спутников, поступающих от приёмной аппаратуры спутниковых навигационных систем,
– о параметрах ориентации, поступающих от блока выработки параметров ориентации,
– о координатах места и составляющих линейной скорости движения объекта, поступающих от блока выработки навигационных параметров,
– об оценках погрешностей разностных измерений вторых разностей фаз сигналов навигационных спутников, поступающих от блока комплексной обработки информации.
От известного решения заявленная система отличается тем, что бескарданный инерциальный измерительный модуль и антенный модуль выполнены с возможностью вращения относительно географических осей в плоскости горизонта, причём блок комплексной обработки информации и блок формирования и разрешения неоднозначности разностных фазовых измерений выполнены с возможностью использовать измерения разностей фаз сигналов навигационных спутников различных глобальных навигационных спутниковых навигационных систем (как с кодовым, так и с частотным разделением сигналов).
В предпочтительном варианте бескарданный инерциальный измерительный модуль снабжён приводом с датчиком угла, выполненным с возможностью обеспечения модуляционного вращения и измерения угла поворота измерительного блока вокруг оси, ортогональной палубе.
Блок выработки параметров ориентации может быть выполнен с возможностью приёма информации об угле поворота привода от датчика угла.
Блок комплексной обработки информации может быть выполнен с возможностью выработки и передачи информации об оценках погрешностей параметров ориентации, поступающей на вход блока выработки параметров ориентации, информации о погрешности масштабного коэффициента гироскопа измерительного блока, установленного по оси вращения измерительного блока, поступающей на вход блока выработки параметров ориентации.
Блок комплексной обработки информации может быть выполнен с возможностью выработки и передачи информации об оценках погрешностей координат места и составляющих линейной скорости движения объекта, поступающей на вход блока вычисления навигационных параметров, информации об оценках дрейфов акселерометров, поступающей на вход блока вычисления навигационных параметров.
Антенный модуль приёмной аппаратуры спутниковых навигационных систем может быть жёстко установлен в осях измерительного блока бескарданного инерциального измерительного блока в плоскости, параллельной палубе объекта, таким образом, что расстояние между антеннами менее длины волны несущей частоты спутникового сигнала.
Заявленная система обладает следующими основными отличиями:
- антенный модуль приёмной аппаратуры спутниковых навигационных систем, содержащий, по меньшей мере, две приёмные антенны, разнесённые на расстоянии менее длины волны несущей частоты спутникового сигнала, установлены жёстко в осях измерительного блока инерциального модуля в плоскости палубы объекта;
- измерительный блок инерциального модуля вместе с антенным модулем приёмной аппаратуры спутниковых навигационных систем установлен на вращающееся основание, снабженное приводом для обеспечения модуляционного вращения относительно корпуса бескарданного инерциального измерительного модуля вокруг оси, ортогональной палубе;
- привод снабжен датчиком угла, измеряющим значения угла поворота измерительного блока с антенным модулем относительно корпуса бескарданного инерциального измерительного модуля, привязанного к осям объекта;
- при вращении измерительного блока бескарданного инерциального измерительного модуля осуществляется калибровка большего числа (в сравнении с прототипом) инструментальных погрешностей измерительного блока: дополнительно осуществляется оценивание дрейфов акселерометров [12, 13] и погрешности масштабного коэффициента гироскопа, установленного по оси измерительного блока бескарданного инерциального измерительного модуля.
Реализация указанных мер при соответствующей совместной обработке данных приёмной аппаратуры спутниковых навигационных систем и бескарданного инерциального измерительного модуля в интегрированной системе ориентации и навигации (навигационных параметров, фазовых измерений) позволяет, в сравнении с прототипом, достичь следующего технического результата: существенного повышения точности выработки параметров ориентации объекта при сокращении длины антенной базы до уровня длины волны несущей сигнала
, расширения возможностей по калибровке на подвижном объекте смещений нулей акселерометров и гироскопа, установленного по оси
, бескарданного инерциального измерительного модуля, снижения массогабаритных характеристик интегрированной системы ориентации и навигации в 2 и более раз.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
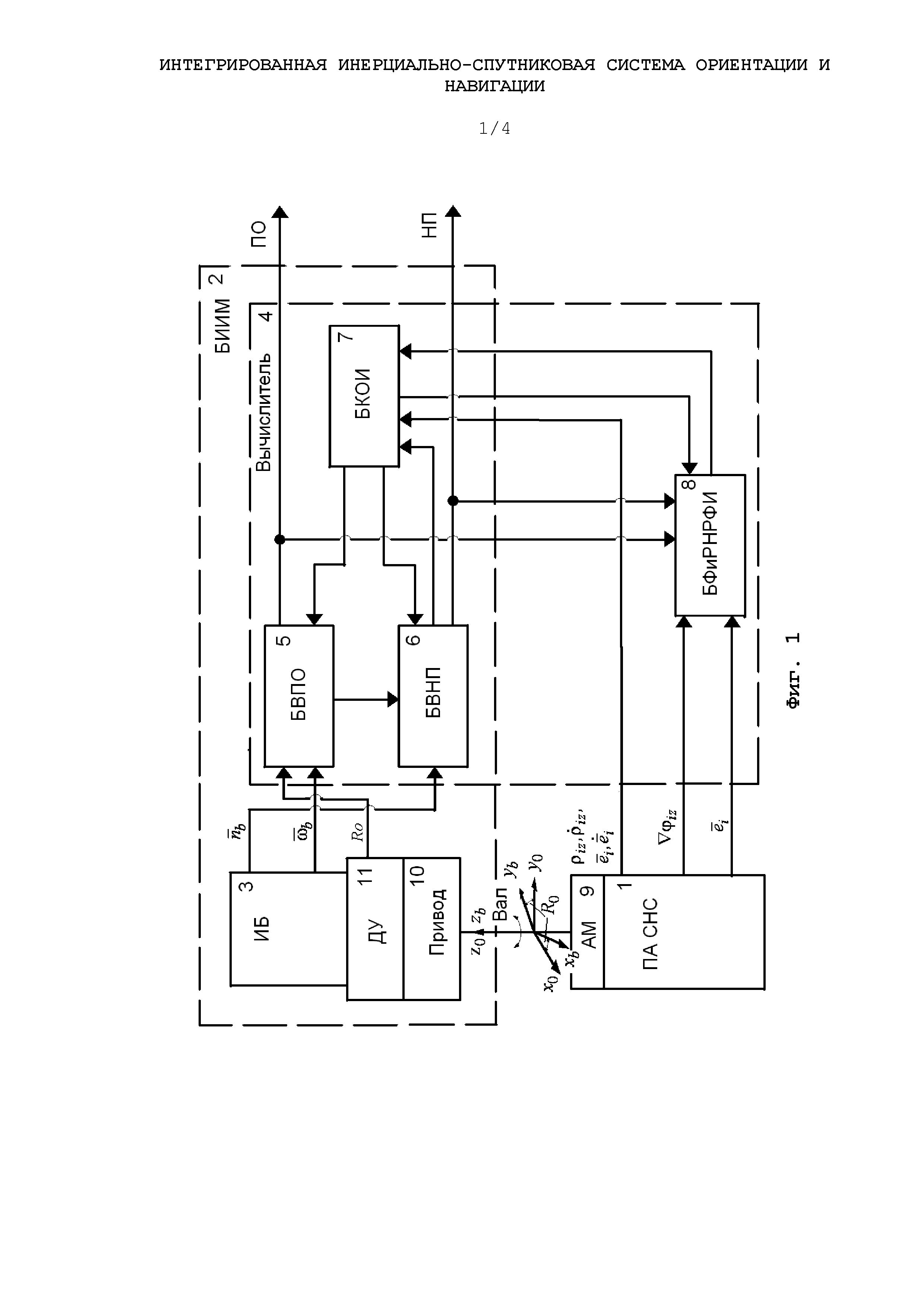
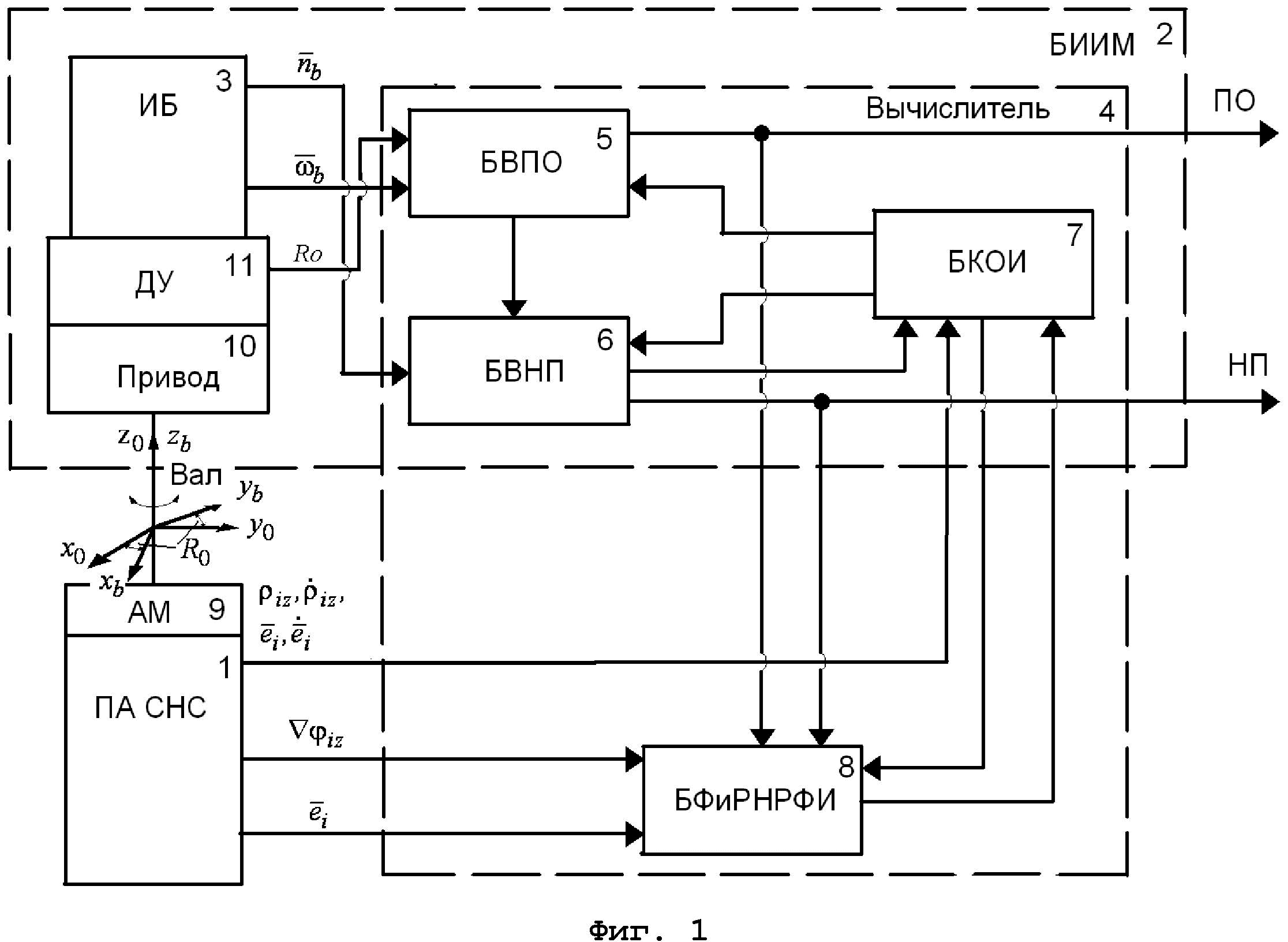
На фиг. 1 изображена блок-схема предлагаемой интегрированной системы ориентации и навигации.
Фиг. 2, 3, 4 иллюстрируют результаты стендовых испытаний макетного образца интегрированной системы ориентации и навигации, включающей измерительный блок на микромеханических датчиках STIM 300 фирмы Sensonor (Норвегия) и две приёмные аппаратуры спутниковой навигационной системы 1К-181 фирмы ОАО «Российский институт радионавигации и времени» (Россия) с разнесёнными по поперечной оси  двумя антеннами на антенной базе 23,5 см.
двумя антеннами на антенной базе 23,5 см.
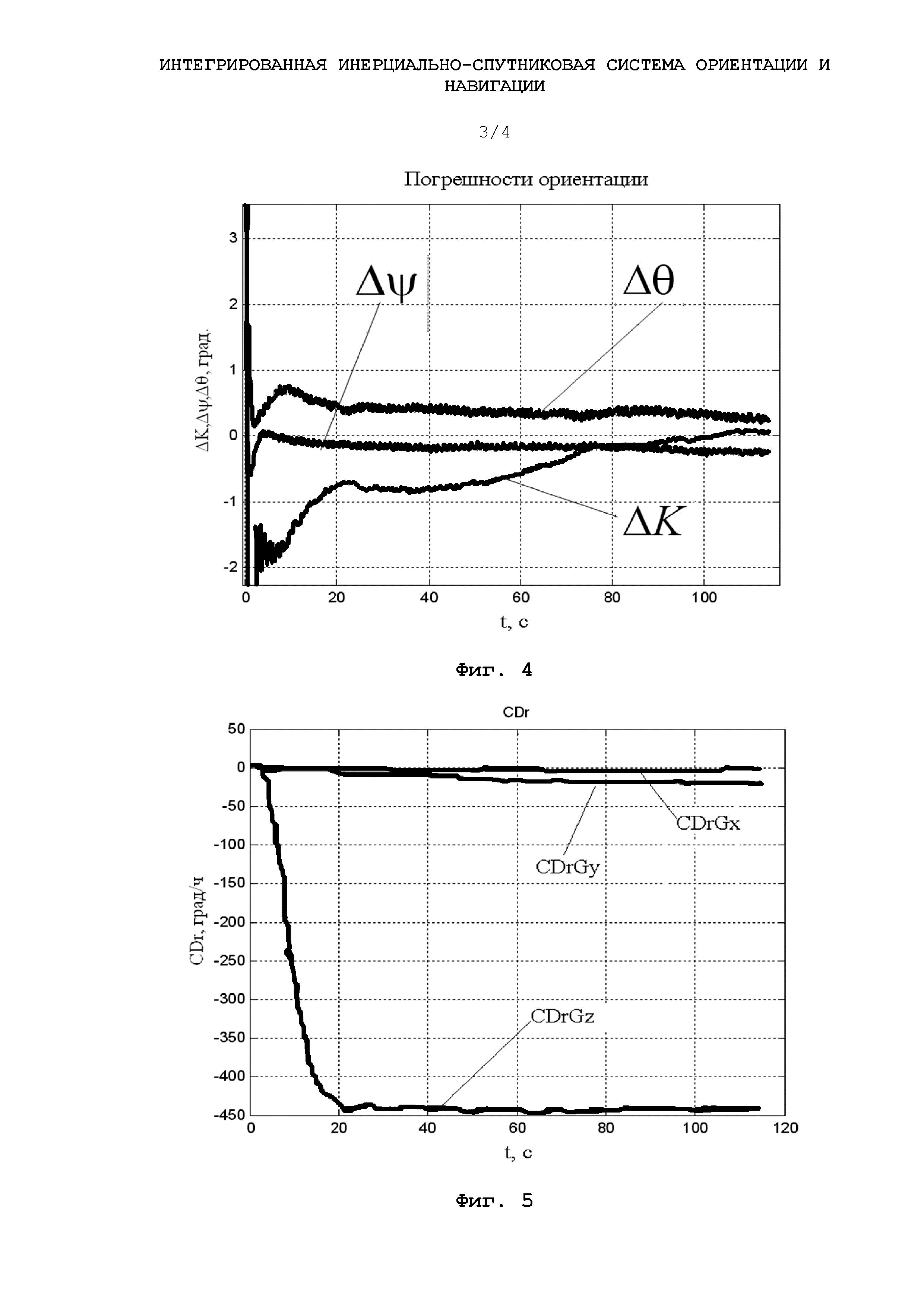
На фиг. 5 приведены оценки дрейфов микромеханических гироскопов.
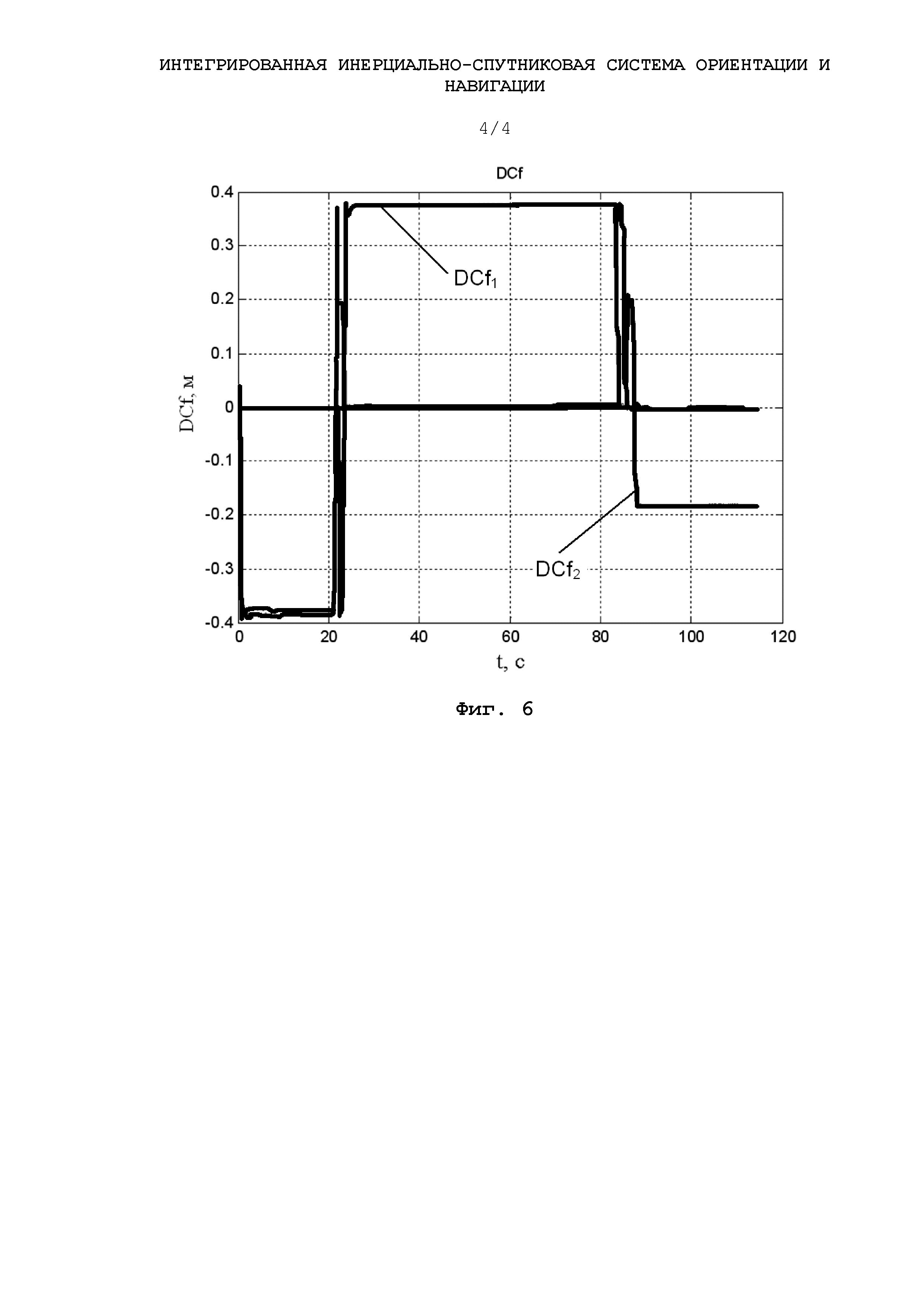
На фиг. 6 приведены оценки остаточной неоднозначности разностных фазовых измерений.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг. 1 приняты следующие обозначения:
1 – миниатюрная приёмная аппаратура спутниковых навигационных систем (ПА СНС), содержащая один специализированный или две (или более) приёмные аппаратуры спутниковых навигационных систем и две (или более) антенны, разнесённые на соответствующих антенных базах и формирующие антенный модуль;
2 – бескарданный инерциальный измерительный модуль (БИИМ);
3 – измерительный блок с микромеханическими гироскопами и акселерометрами, и обеспечивающей электроникой;
4 – вычислитель бескарданного инерциального измерительного модуля;
5 – блок вычисления параметров ориентации (ПО) объекта (БВПО), на вход которого помимо прочих сигналов поступает вектор абсолютной угловой скорости , измеряемый гироскопами;
6 – блок вычисления навигационных параметров (НП) объекта (БВНП), на вход которого помимо прочих сигналов поступает вектор кажущегося ускорения , измеряемый акселерометрами;
7 – блок комплексной обработки информации (БКОИ), на вход которого помимо прочих сигналов поступают:
- , – измеренные и откорректированные значения дальности и радиальной скорости для каждого из наблюдаемых  соответственно;
соответственно;
- , – эфемериды (значения декартовых координат и составляющих вектора линейной скорости относительно Земли в проекциях на гринвичские оси) для ;
8 – блок формирования и разрешения неоднозначности разностных фазовых измерений (БФиРНРФИ), на вход которого (помимо прочих сигналов) поступают:
-  – полные разности фаз сигналов, принимаемых приёмной аппаратурой спутниковой навигационной системы в точках размещения антенн;
– полные разности фаз сигналов, принимаемых приёмной аппаратурой спутниковой навигационной системы в точках размещения антенн;
-  – эфемериды (значения декартовых координат в проекциях на гринвичские оси) для ;
– эфемериды (значения декартовых координат в проекциях на гринвичские оси) для ;
9 – антенный модуль приёмной аппаратуры спутниковых навигационных систем, содержащий как минимум две антенны, разнесённые на соответствующей антенной базе. При этом АМ жёстко закреплён в осях измерительного блока инерциального измерительного модуля в плоскости  (находящейся в плоскости палубы объекта);
(находящейся в плоскости палубы объекта);
10 – привод, обеспечивающий вращение измерительного блока вместе с антенным модулем приёмной аппаратуры спутниковых навигационных систем вокруг оси  , ортогональной плоскости палубы, относительно корпуса бескарданного инерциального измерительного модуля.
, ортогональной плоскости палубы, относительно корпуса бескарданного инерциального измерительного модуля.
11 – датчик угла, измеряющий угол поворота  измерительного блока вместе с антенным модулем приёмной аппаратуры спутниковых навигационных систем относительно корпуса бескарданного инерциального измерительного модуля;
измерительного блока вместе с антенным модулем приёмной аппаратуры спутниковых навигационных систем относительно корпуса бескарданного инерциального измерительного модуля;
Здесь и далее рассматривается измерительный блок на микромеханических датчиках, включающий микромеханические гироскопы класса точности 10°/ч, что соответствует волоконно-оптическому гироскопу низкой точности. Проведение испытаний с измерительным блоком на микромеханических датчиках было обусловлено практической целесообразностью. Все приводимые далее результаты исследований распространяются в равной степени и на измерительный блок на волоконно-оптических гироскопах, сопоставимых с измерительным блоком на микромеханических датчиках по уровню погрешностей. В дальнейшем, если это особо не оговаривается, будет рассматриваться указанный измерительный блок на микромеханических датчиках.
Реализация данных условий и представляет собой основное отличие предлагаемого устройства от прототипа, что требует внесения изменений в конструкцию бескарданного инерциального измерительного модуля 2 и антенного модуля приёмной аппаратуры 1 спутниковых навигационных систем, а также учёта дополнительной связи между датчиком 11 угла и вычислителем 4 бескарданного инерциального измерительного модуля.
Алгоритмическое обеспечение блоков вычислителя 4 бескарданного инерциального измерительного модуля предлагаемой схемы интегрированной системы ориентации и навигации (фиг. 1) аналогично алгоритмам работы соответствующих блоков прототипа за исключением:
– блока 8 формирования и разрешения неоднозначности разностных фазовых измерений, где при формировании разностных измерений вторых разностей фаз дополнительно учитывается информация о длине волн сигналов навигационных спутников с частотным разделением их сигналов;
- блока 7 комплексной обработки информации, где дополнительно вырабатываются оценки дрейфов акселерометров и погрешности масштабного коэффициента гироскопа, установленного по оси измерительного блока 3 бескарданного инерциального измерительного модуля 2 и дополнительно вводится расширенная модель погрешностей вторых разностей фаз блока формирования и разрешения неоднозначности разностных фазовых измерений 8,
- блока 5 вычисления параметров ориентации вычислителя предлагаемой интегрированной системы ориентации и навигации, куда дополнительно вводятся показания датчика 11 угла, расположенного по оси вращения измерительного блока 3 и измеряющего угол  поворота измерительного блока 3 с антенным модулем 9 относительно корпуса бескарданного инерциального измерительного модуля 2. При этом в блоке 5 вычисления параметров ориентации будут вычисляться как параметры ориентации измерительного блока 3 бескарданного инерциального измерительного модуля 2 (матрица направляющих косинусов
поворота измерительного блока 3 с антенным модулем 9 относительно корпуса бескарданного инерциального измерительного модуля 2. При этом в блоке 5 вычисления параметров ориентации будут вычисляться как параметры ориентации измерительного блока 3 бескарданного инерциального измерительного модуля 2 (матрица направляющих косинусов  ), так и параметры ориентации объекта (матрица направляющих косинусов
), так и параметры ориентации объекта (матрица направляющих косинусов  и углы курса
и углы курса  , тангажа
, тангажа  и крена
и крена  ), поступающие на выход интегрированной системы ориентации и навигации (фиг. 1).
), поступающие на выход интегрированной системы ориентации и навигации (фиг. 1).
 , (1)
, (1)
где  .
.
Отличием является также то, что в блоке 6 вычисления навигационных параметров и блоке 8 формирования и разрешения неоднозначности разностных фазовых измерений вычислителя 4 бескарданного инерциального измерительного модуля предлагаемой интегрированной системы ориентации и навигации необходимо использовать, в отличие от прототипа, матрицу перехода от осей измерительного блока 3 () к осям географического сопровождающего трёхгранника ( ), а не матрицу перехода от осей объекта () к гринвичским осям
), а не матрицу перехода от осей объекта () к гринвичским осям  .
.
Предлагаемая интегрированная система ориентации и навигации работает следующим образом.
Как и в прототипе [11], а также в [14], формирование вторых разностей измеренных значений фазовых измерений производится в блоке 8 разрешения неоднозначности разностных фазовых измерений (фиг. 1):
 . (2)
. (2)
где  – измеренное значение направляющего косинуса орта
– измеренное значение направляющего косинуса орта  (радиус-вектора, соединяющего опорную антенну и ) относительно антенной базы
(радиус-вектора, соединяющего опорную антенну и ) относительно антенной базы  для .
для .
Отличием является то, что при определении учитывается информация о частотах излучаемых навигационными спутниками сигналов при частотном их разделении.
Формирование вторых разностей  расчётных (с использованием данных бескарданного инерциального измерительного модуля) значений фазовых измерений также производится в блоке 8 разрешения неоднозначности разностных фазовых измерений (фиг. 1).
расчётных (с использованием данных бескарданного инерциального измерительного модуля) значений фазовых измерений также производится в блоке 8 разрешения неоднозначности разностных фазовых измерений (фиг. 1).
Входными данными блока 8 разрешения неоднозначности разностных фазовых измерений являются:
- полные разности фаз сигналов , принимаемых приёмной аппаратурой спутниковой навигационной системы в точках размещения антенн;
- значения декартовых координат  от приёмной аппаратуры спутниковой навигационной системы 1;
от приёмной аппаратуры спутниковой навигационной системы 1;
- значения координат места и составляющих линейной скорости движения объекта от блока 6 вычисления навигационных параметров;
- значения параметров ориентации измерительного блока 3 бескарданного инерциального измерительного модуля 2 (матрицы направляющих косинусов ) от блока 5 вычисления параметров ориентации;
- оценки остаточных неоднозначностей фазовых измерений от блока 7 комплексной обработки информации.
Выходными данными блока 8 разрешения неоднозначности разностных фазовых измерений являются разности  расчётных и измеренных значений вторых разностей фаз сигналов :
расчётных и измеренных значений вторых разностей фаз сигналов :
 , (3)
, (3)
которые содержат с соответствующими весами в основном погрешности решения бескарданного инерциального измерительного модуля 2 задачи ориентации измерительного блока 3, погрешности ориентации антенной базы  относительно связанных с измерительного блока 3 осей
относительно связанных с измерительного блока 3 осей  , неоднозначности вторых разностей фазовых измерений и шумы измерений.
, неоднозначности вторых разностей фазовых измерений и шумы измерений.
Погрешности ориентации осей измерительного блока 3 бескарданного инерциального измерительного модуля 2 относительно географического сопровождающего трехгранника  – это погрешности
– это погрешности  матрицы ориентации, которые однозначно связаны с погрешностями
матрицы ориентации, которые однозначно связаны с погрешностями  аналитического построения осей
аналитического построения осей  , где
, где  – погрешность по курсу,
– погрешность по курсу,  – погрешности построения вертикали места.
– погрешности построения вертикали места.
После предварительной обработки и линеаризации, как и в прототипе [11] и в [14], эти разностные измерения можно приближенно записать в виде:
 (4)
(4)
где  – направляющие косинусы вектора антенной базы
– направляющие косинусы вектора антенной базы  в географических осях, т.е. элементы вектора
в географических осях, т.е. элементы вектора  , (здесь
, (здесь  – известные значения направляющих косинусов вектора антенной базы в осях измерительного блока 3 – априорная информация);
– известные значения направляющих косинусов вектора антенной базы в осях измерительного блока 3 – априорная информация);
 – элементы орта
– элементы орта  (направляющие косинусы орта относительно географических осей);
(направляющие косинусы орта относительно географических осей);
 – погрешности, обусловленные остаточной неоднозначностью (в пределах длины волны несущей) вторых разностей фазовых измерений для пары спутников
– погрешности, обусловленные остаточной неоднозначностью (в пределах длины волны несущей) вторых разностей фазовых измерений для пары спутников  и ;
и ;
 – шумы измерений, включающие шумы приёмной аппаратуры спутниковой навигационной системы 1 и составляющие, обусловленные погрешностями знания координат места объекта, эфемеридной информации и погрешностями привязки вектора антенной базы к осям измерительного блока 3 бескарданного инерциального измерительного модуля 2.
– шумы измерений, включающие шумы приёмной аппаратуры спутниковой навигационной системы 1 и составляющие, обусловленные погрешностями знания координат места объекта, эфемеридной информации и погрешностями привязки вектора антенной базы к осям измерительного блока 3 бескарданного инерциального измерительного модуля 2.
Измерения  вместе с известными [15] разностными измерениями по навигационным параметрам с выхода блока 8 разрешения неоднозначности разностных фазовых измерений поступают на вход блока 7 комплексной обработки информации для последующей обработки с использованием алгоритмов фильтра Калмана.
вместе с известными [15] разностными измерениями по навигационным параметрам с выхода блока 8 разрешения неоднозначности разностных фазовых измерений поступают на вход блока 7 комплексной обработки информации для последующей обработки с использованием алгоритмов фильтра Калмана.
Оценки, выработанные в блоке 7 комплексной обработки информации, поступают в обратную связь (фиг. 1):
- для коррекции погрешностей бескарданного инерциального измерительного модуля 2 в выработке параметров ориентации и компенсации дрейфов гироскопов, а также погрешности масштабного коэффициента гироскопа, установленного по оси измерительного блока 3 бескарданного инерциального измерительного модуля 2 (поступают на один из входов блока вычисления параметров ориентации 5);
- для коррекции погрешностей бескарданного инерциального измерительного модуля 2 в выработке навигационных параметров и погрешностей акселерометров (поступают на один из входов блока 6 вычисления навигационных параметров);
- для коррекции измерений в части их остаточной неоднозначности (поступают на один из входов блока разрешения неоднозначности разностных фазовых измерений 8). В отличие от прототипа модель этих погрешностей фазовых измерений была уточнена и расширена: кроме их описания «скачкообразными» случайными величинами (описание в виде случайных констант) была введена модель, использующая описание в виде соответствующих винеровских процессов с учётом особенностей вращения антенного модуля.
Из анализа измерений (4) следует, что вращение измерительного блока 3 вместе с антенным модулем 9 приёмной аппаратуры 1 спутниковой навигационной системы приводит к модуляции погрешностей решения задачи ориентации, т.к. коэффициенты  при них носят колебательный характер. Данный факт существенным образом повышает их наблюдаемость на фоне шумов измерений и, следовательно, эффективность используемых измерений.
при них носят колебательный характер. Данный факт существенным образом повышает их наблюдаемость на фоне шумов измерений и, следовательно, эффективность используемых измерений.
В результате оказывается возможным (фиг. 2 - фиг. 6), в отличие от прототипа, обеспечение точности выработки курса на уровне 0,5° (P=0,997) при использовании антенной базы с расстоянием между антеннами менее длины волны несущей частоты. Данный факт позволяет существенно уменьшить массогабаритные характеристики антенного модуля интегрированной системы ориентации и навигации.
Кроме того, в данном случае, в отличие от прототипа, для уточнения всех параметров ориентации достаточно использования в антенном модуле одной антенной базы. Кроме того, в предлагаемой схеме устойчивого решения в выработке параметров ориентации удаётся достичь при существенно меньшем (в сравнении с прототипом) количестве . Для интегрированной системы ориентации и навигации с двумя приёмными аппаратурами спутниковой навигационной системы, возможно получение устойчивого решения только при двух наблюдаемых , в том числе при запуске системы и отсутствии априорной информации о курсе.
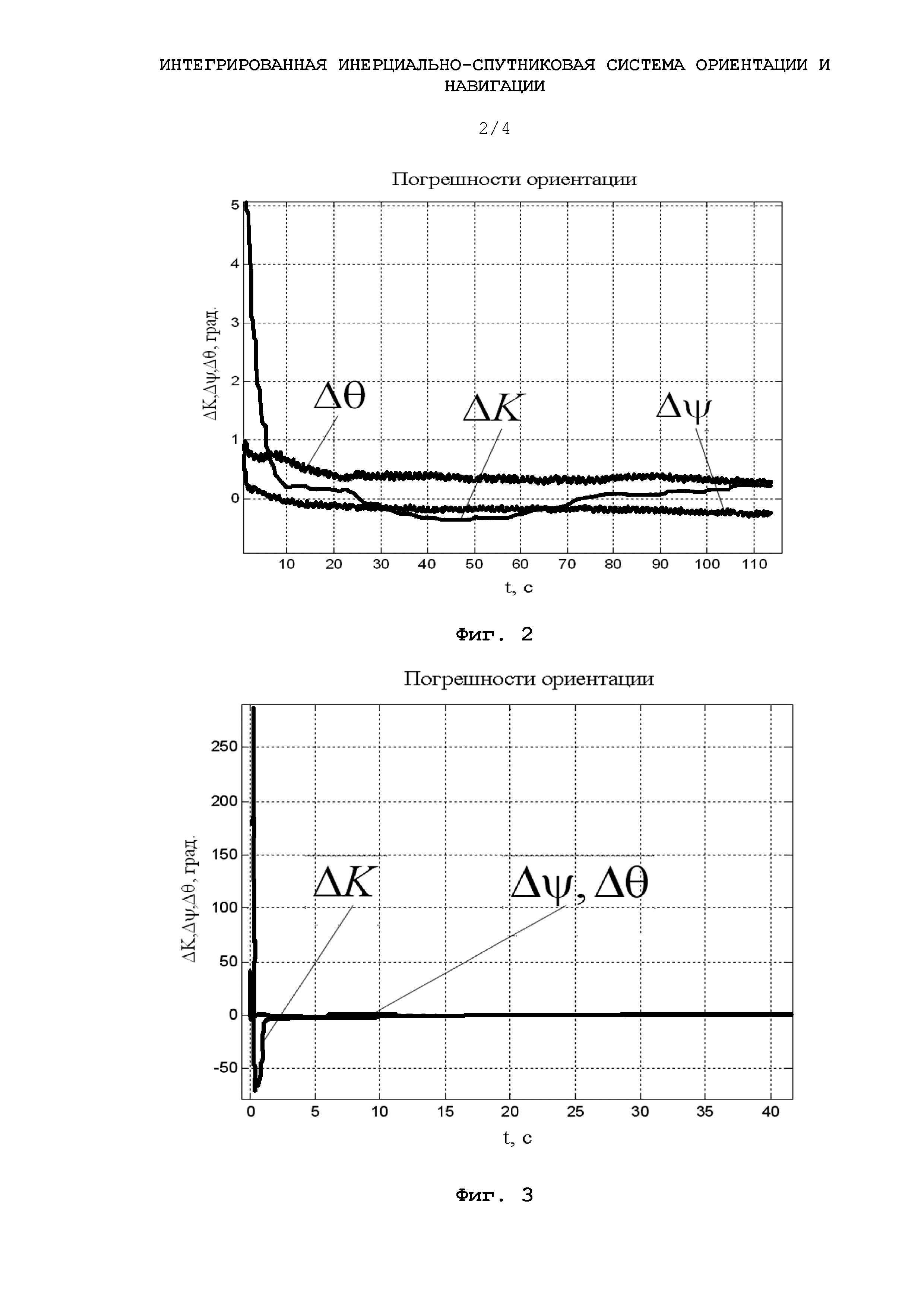
На фиг. 2, 3 и 4 приняты следующие обозначения:
ΔK – погрешность ориентации по курсу (град.);
Δθ, ΔΨ – погрешности ориентации по углам бортовой и килевой качки соответственно (град.);
t – время в секундах.
На фиг. 5 приняты следующие обозначения:
CDr – оценки дрейфов ММГ (CDrGx, CDrGy, CDrGz – оценки дрейфов x-го, y-го и z-го гироскопов соответственно).
На фиг. 6 приняты следующие обозначения:
DCf – оценки неоднозначности фазовых измерений (для двух пар разностных фазовых измерений вторых разностей фаз, иллюстрирующие их изменчивость во время проведения эксперимента).
Анализ точности предлагаемой схемы построения интегрированной системы ориентации и навигации
Для доказательства работоспособности устройства и оценки точности предлагаемого решения был разработан макетный образец интегрированной системы ориентации и навигации и проведены его стендовые испытания. В состав макетного образца системы вошли измерительный блок на микромеханических датчиках STIM 300 фирмы Sensonor (Норвегия) и две приёмные аппаратуры спутниковой навигационной системы 1К-181 фирмы ОАО «Российский институт радионавигации и времени» с разнесёнными по поперечной оси двумя антеннами на антенной базе 23,5 см. Макетный образец системы устанавливался на одноосном столе позиционирования и вращения, обеспечивающем вращение с угловой скоростью до 1 Гц и съём первичной информации. Частота съёма данных от микромеханических датчиков составляла 1 кГц, а от приёмных модулей спутниковой навигационной системы – 5 Гц.
Формирование двух пар вторых разностей фазовых измерений осуществлялось по трем постоянно наблюдаемым НС GPS (один использовался в качестве опорного).
При проведении испытаний измерительного блока бескарданного инерциального измерительного модуля был наклонён на углы -41° и 1,4° по осям килевой и бортовой качки соответственно.
Для обработки разностных фазовых измерений (4) совместно с известными скоростными и позиционными измерениями с помощью алгоритмов фильтра Калмана использовалась следующая расчётная модель погрешностей.
Расчётная модель погрешностей
При формировании расчётной модели погрешностей интегрированной системы ориентации и навигации использовались следующие аппроксимации:
- смещения нулей ММГ  и акселерометров
и акселерометров  , изменение систематических составляющих погрешностей масштабных коэффициентов ММГ
, изменение систематических составляющих погрешностей масштабных коэффициентов ММГ  от запуска к запуску и их изменчивость в пуске были аппроксимированы (из-за отсутствия достоверных данных об их спектральном составе) соответствующими винеровскими процессами;
от запуска к запуску и их изменчивость в пуске были аппроксимированы (из-за отсутствия достоверных данных об их спектральном составе) соответствующими винеровскими процессами;
- погрешности  были описаны «скачкообразными» случайными величинами, а также соответствующими винеровскими процессами с учётом особенностей вращения антенного модуля, дисперсия которых восстанавливается до начальной неопределенности при фиксации «скачка» в измерениях
были описаны «скачкообразными» случайными величинами, а также соответствующими винеровскими процессами с учётом особенностей вращения антенного модуля, дисперсия которых восстанавливается до начальной неопределенности при фиксации «скачка» в измерениях  ;
;
- шумы измерений  аппроксимированы дискретными белыми шумами с известными дисперсиями на частоте формирования измерений.
аппроксимированы дискретными белыми шумами с известными дисперсиями на частоте формирования измерений.
В этом случае расчётная модель погрешностей интегрированной системы ориентации и навигации будет иметь вид
 (5)
(5)
где вектор состояния системы (без учёта погрешностей опорного генератора приёмной аппаратуры спутниковой навигационной системы) будет иметь вид: (6)
(6)
Здесь
 – переходная на шаге
– переходная на шаге  дискретности измерений матрица состояния системы;
дискретности измерений матрица состояния системы;
 – матрица, определяющая влияние вектора входных шумов
– матрица, определяющая влияние вектора входных шумов  с ковариациями
с ковариациями  ;
;
 – матрица измерений, соответствующая известным разностным навигационным измерениям и дополнительно уравнениям (4);
– матрица измерений, соответствующая известным разностным навигационным измерениям и дополнительно уравнениям (4);
 – погрешности в выработке составляющих вектора относительной линейной скорости объекта в проекциях на географические оси;
– погрешности в выработке составляющих вектора относительной линейной скорости объекта в проекциях на географические оси;  – погрешности выработки географических координат места (по широте, долготе и высоте).
– погрешности выработки географических координат места (по широте, долготе и высоте).
Результаты стендовых испытаний макетного образца интегрированной системы ориентации и навигации
Результаты испытаний приведены на фиг. 2 - 6.
На фиг. 2 приведены погрешности ориентации при задании начальной погрешности по курсу порядка 10°.
На фиг. 3 и 4 приведены погрешности ориентации при задании начальной погрешности по курсу 180°, т.е. имитация отсутствия априорной информации о начальном значении угла курса (на фиг. 3 графики изменчивости погрешностей по параметрам ориентации приведены в укрупнённом по времени и уменьшенном по погрешностям ориентации масштабе).
Графики фиг. 5 и фиг. 6 приведены для случая задания начальной неопределённости по курсу 180°.
Результаты стендовых испытаний макетного образца предлагаемой схемы построения интегрированной системы ориентации и навигации, приведённые на графиках фиг. 2 - 6, подтверждают то, что при существенном уменьшении длины антенной базы (до уровня длины волны несущей частоты), одновременном наблюдении за сигналами ограниченного количества навигационных спутников достигается точность выработки курса на уровне 0,5° (Р=0,997), что представляется достаточным для обеспечения задач, решаемых рассматриваемыми малоразмерными аппаратами.
Таким образом, заявленный технический результат считается достигнутым.
Литература
1. кртз.рф/navigation.html
2. Заявка РФ № 98118543.
3. Патент РФ № 2215299.
4. Патент РФ № 2276384.
5. Патент США № US2010/0117894.
6. www.km.kongsberg.com.
7. Интегрированная инерциально-спутниковая система ориентации и навигации с разнесенными антеннами // Сб. Интегрированные инерциально-спутниковые системы навигации.- СПб: изд-во «ЦНИИ «Электроприбор», 2001, С. 222-229.
8. Интегрированная система спутниковой и инерциальной навигации: экспериментальные результаты и применение к управлению мобильными роботами // Гироскопия и навигация, 2007, №1(56), С. 16-28.
9. rtelecom.ru /catalog /obradio /glonass /3098.php.
10. Степанов О.А., Кошаев Д.А. Исследование методов решения задачи ориентации с использованием спутниковых систем // Гироскопия и навигация, 1999, №2(25), С. 30-55.
11. Патент РФ № 2462690.
12. Степанов А.П., Игнатьев С.В., Винокуров И.Ю. и др. Об определении оптимального закона управления приводом модуляционного вращения исходя из минимизации погрешностей инерциально-спутниковой системы // Материалы 4-й Всероссийской мультиконференции по проблемам управления МКПУ-2011. Т. 2. – Таганрог: Изд-во ТТИ ЮФУ, 2011, С. 316-318
13. A.P. Stepanov, S.V. Ignatiev, I.V. Semyonov Optimal Control of the Modulation Rotation Actuator in a GNSS-aided Inertial System// Volume of 14 Inretnational Student Olympiad on Automatic Control (Baltic Olympiad) SPb, 2011, pp.141-144 .
14. Емельянцев Г.И., Блажнов Б.А., Степанов А.П. Особенности использования фазовых измерений в задаче ориентации интегрированной инерциально-спутниковой системы. Результаты ходовых испытаний // Гироскопия и навигация, 2011, №3(74), C. 3-11.
15. Анучин О.Н., Емельянцев Г.И. Интегрированные системы ориентации и навигации для морских подвижных объектов // Под общей ред. акад. РАН В.Г.Пешехонова. - СПб.: 2003, С. 389.
Способ измерения физической неэлектрической величины
Способ выставки осевого зазора в газодинамическом подвесе оси вращения ротора гиромотора
Стенд для выработки угловых колебаний в двух плоскостях
Устройство для напыления тонкопленочных покрытий на сферические роторы электростатического гироскопа
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Микромеханический вибрационный гироскоп
Способ определения погрешностей двухстепенного поплавкового гироскопа с газодинамическим подвесом ротора гиромотора
Способ бесплатформенной инерциальной навигации на микромеханических чувствительных элементах
Способ изготовления ротора электростатического гироскопа
Двухстепенной поплавковый гироскоп
Способ измерения физической неэлектрической величины
Способ выставки осевого зазора в газодинамическом подвесе оси вращения ротора гиромотора
Стенд для выработки угловых колебаний в двух плоскостях
Устройство для напыления тонкопленочных покрытий на сферические роторы электростатического гироскопа
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Микромеханический вибрационный гироскоп
Способ определения погрешностей двухстепенного поплавкового гироскопа с газодинамическим подвесом ротора гиромотора
Способ бесплатформенной инерциальной навигации на микромеханических чувствительных элементах
Способ изготовления ротора электростатического гироскопа
Двухстепенной поплавковый гироскоп

