Результат интеллектуальной деятельности: Автономный мобильный робототехнический комплекс
Вид РИД
Изобретение
Автономный мобильный робототехнический комплекс предназначен для мониторинга прибрежной зоны и прогнозирования морских природный катастроф. Мониторинг окружающей природной среды необходим, прежде всего, в малодоступной (недоступной и опасной) для человека обстановке, на восточных и северных побережьях России, где надо осуществлять постоянный сбор информации о природных процессах, происходящих на морских побережьях и в морях.
Настоящее изобретение относится к области машиностроения, в частности к мобильным робототехническим транспортным комплексам для мониторинга прибрежной зоны и прогнозирования морских природных катастроф. Автономный мобильный робототехнический комплекс (АМРК) предназначен для дистанционной работы в труднопроходимой местности: болотистая, обводненные пески, водная поверхность, заснеженная и льдистая местность и т.п. Изобретение создает новые технологические возможности для исследования параметров волнения морских прибрежных водных поверхностей с целью прогнозирования и предотвращения опасных последствий морских природных катастроф. Его использование исключает нахождение человека в опасных и/или некомфортных условиях, не позволяющих производить необходимые исследования - сбор, обработку и передачу информации - о состоянии окружающей природной среды. Настоящее изобретение позволяет обеспечить адаптацию дистанционно управляемого мобильного робототехнического комплекса к поверхности пути, в частности к его несущей способности, обеспечить выбор направления движения и предотвратить возможную потерю подвижности; оно обеспечивает надежную доставку и работу навигационного, радиолокационного, дальномерного видео и другого оборудования в зоне мониторинга, а также возвращение АМРК на пункт управления.
Известен мобильный робот (патент на изобретение № 2274543), содержащий размещенные в корпусе устройства для перемещения робота, блок обнаружения препятствия, блок определения текущего местоположения робота и блок наблюдения за пространством перед роботом, соединенные посредством информационных каналов с блоком управления и источником питания. Блок наблюдения за пространством перед роботом подключен к видеокамере наблюдения. Робот имеет перемещающееся средство с размещенными на нем станцией мобильной связи, выполненной с возможностью доступа в Интернет, и пультом дистанционного управления в виде персонального компьютера, соединенного информационным каналом со станцией мобильной связи. Устройство для перемещения робота выполнено в виде самодвижущейся тележки, которая кинематически связана с перемещающимся средством. Блок обнаружения препятствия снабжен установленными на корпусе самодвижущейся тележки передатчиком и приемником ультразвукового сигнала. Источник питания соединен также с блоком определения пройденного роботом расстояния, блоком измерения ускорения при движении робота и со станцией мобильной связи и персональным компьютером. Изобретение повышает эффективность функционирования и управляемости робота. Данное устройство используется в робототехнике для отработки новых методов управления, анализа состояния пространства перед роботом и над ним, измерения ускорения при движении, получения изображения с видеокамер и его сохранения, получения трехмерного изображения робота в реальном масштабе времени при его движении по поверхности.
Предлагаемые в данном техническом решении методы сбора и обработки информации и управления мобильным роботом не решают вопросов адаптации робота в дорожных условиях, когда возникает опасность потери подвижности шасси из-за недостаточной несущей способности грунтовой поверхности, не предусматривает наличие устройств и приборов для наблюдения за окружающей средой, фиксации метеорологических условий, сканирования водной среды и т.п.
Известны промышленно выпускаемые роботизированные мобильные устройства.
Наиболее близкими техническими решениями среди аналогов российского производства являются МРК-61 (МГТУ им. Н.Э. Баумана, ЗАО «Экоинвент»), минные тральщики УРАН-6, УРАН-9 (ОАО «766 УПРАВЛЕНИЕ ПРОИЗВОДСТВЕННО - ТЕХНОЛОГИЧЕСКОЙ КОМПЛЕКТАЦИИ»), «Платформа-М» (ОАО «НИТИ «ПРОГРЕСС»).
Мобильный робототехнический комплекс МРК-61, разработанный Специальным конструкторско-технологическим бюро прикладной робототехники МГТУ им. Н.Э. Баумана (СКТБ ПР МГТУ им. Н.Э. Баумана, (http://www.sm.bmstu.ru/sktb.htm) ) совместно с ЗАО «Экоинвент», предназначен для ведения радиационной разведки, дозиметрического контроля местности, обозначения зараженной зоны и ликвидации источников повышенной радиации. Масса МР - 800 кг, габаритные размеры, м (В×Ш×Д) - 1,01×1,15×2,55, скорость, км/ч - 4,5. Существенным недостатком данной машины, наиболее близкой по техническим возможностям к решению задач мониторинга прибрежных зон в труднодоступных и удаленных от человека районах, является наличие одного гусеничного движителя, отсутствие возможности преодоления водных преград, управление по кабелю и радиус действия – 200 м.
Известные роботы - минные тральщики УРАН-6 и УРАН-9 - являются многофункциональными робототехническими комплексами весом от шести до 9 тонн на гусеничной платформе, предназначенными для проделывания проходов в минно-взрывных заграждениях и площадного разминирования территорий. Максимальная скорость движения машин – 12 км/ч. Способны двигаться по твердой грунтовой поверхности, не обладают вездеходностью на слабых грунтах, не водоходны.
Известен многофункциональный робототехнический комплекс модульного построения «Нерехта», транспортным модулем которого является мобильный робот «Платформа-М2». Боевой робот «Нерехта» создан на предприятии ОАО «Завод им. Дегтярева», г. Ковров Владимирской области, (http://www.army-guide.com/rus/product5206.html), а «Платформа» - в ОАО "НИТИ "ПРОГРЕСС" (Удмуртская Республика) (http://www.niti-progress.ru) в содружестве с Фондом перспективных исследований. Многофункциональный робототехнический комплекс модульного построения «Нерехта» - боевой робот, предназначенный для разведки, корректировки и транспортировки в условиях, когда жизнь солдат подвергается опасности. «Платформа-М» — российский серийный роботизированный комплекс, представляющий универсальную самоходную гусеничную дистанционно-управляемую платформу, универсальный робот, который имеет возможность наведения оружия, сопровождения и поражения целей в автоматическом и полуавтоматическом режимах управления, оснащён оптико-электронной и радиолокационной станциями разведки. Машины имеют грузоподъемность от 300 до 700 кг, обладают дальностью связи до 20 км.
Технические параметры и возможности «Платформы-М» в части грузоподъемности, дальности связи и управления рабочим оборудованием могут быть взяты за аналог при создании АМРК.
Наиболее известным и наиболее близким к предлагаемому техническому решению аналогом по использованию транспортных средств для мониторинга обстановки в прибрежной зоне является автономный робот RTS-Hanna (Wübbold, F., Hentschel, M., Vousdoukas, M., & Wagner, B. (2012). Application of an autonomous robot for the collection of nearshore topographic and hydrodynamic meas-urements. Coastal Engineering Proceedings, 1(33), management.53. doi:10.9753/icce.v33.management.53). На RTS–Hanna установлено: одометр (счетчик оборотов); D-GPS (D-GPS Trimble AgGps 114); лазерный сканер ScanDrive; система инерциальной навигации Giro PerformTech Gu3024; передатчик Velodyne HDL-64E; Microsoft Kinect; ibeo LUX. Шасси роботизированного комплекса представляет собой серийный грузовой автомобиль 4х2 малой грузоподъемности, модернизированный и приспособленный под технологические задачи мониторинга прибрежной зоны. Вся регистрирующая аппаратура установлена стационарно на крыше кабины автомобиля. Таким образом, и автономному роботу RTS-Hanna присущи недостатки рассмотренных выше аналогов.
Недостатки данных комплексов очевидны. Серийно выпускаемое наземное транспортное средство дооснащено модульным навесным оборудованием, предназначенным для выполнения специальных (в данном случае - топографических) измерений. Достижение высокой мобильности робототехнического комплекса становится невозможным в силу ограниченных возможностей по проходимости: например, отсутствие плавучести и других водоходных свойств, а также в силу того, что они лишены возможности управлять положением размещенной на них измерительной и навигационной аппаратуры, лишены дальней связи с наземным пунктом управления.
Техническим результатом предлагаемого устройства является гарантированная доставка регистрирующей аппаратуры в заданный район мониторинга прибрежной зоны, проведение необходимых измерений и обследований (съемок), формирование баз данных и передача их в наземный пункт управления. При этом гарантируется опорная проходимости дистанционно управляемого автономного мобильного робототехнического комплекса, надежная защита и автоматизированная настройка положения его измерительной аппаратуры.
Технический результат достигается тем, что автономный мобильный робототехнический комплекс (АМРК) состоит из транспортного средства, включающего герметичный корпус с надстройкой, силовую, трансмиссионную установки и движитель, систему управления транспортным средством и систему управления движением транспортного средства, приборы и устройства для сбора обработки и передачи информации о природных процесса, другие устройства средств хранения информации, связи и управления, источник питания систем. На корпусе могут быть закреплены и приведены в действие движители, контактирующие с путевой поверхностью: колесный, гусеничный или роторно-винтовой движитель. На корпусе также установлена надстройка, на которой выполнены люки, управляемые дистанционно, закреплены дальномеры, шарнирная гибкая консоль, мачта и выдвижные вращающиеся платформы с установленными на них приборами контроля проходимости грунтовой поверхности, навигационное оборудование позиционирования АМРК и приборы мониторинга окружающей среды. Таким образом, независимо от грунтовых условий (несущей способности грунта) и рельефа местности (неровности пути, единичные препятствия и т.п.) АМРК пройдет путь от пункта управления до зоны обследования с использованием одного из типов движителей (колесного, гусеничного или роторно-винтового), встанет на точке наблюдения с заданными из центра управления координатами, в автоматизированном режиме (по программе бортовой системы управления) будут открыты люки, выдвинуты мачта и вращающиеся платформы, приведены в действие приборы наблюдения за окружающей средой, сбора и обработки информации по заданной программе. Передача сформированных бортовой системой баз данных в центр управления по объему и интервалам времени задается центром управления.
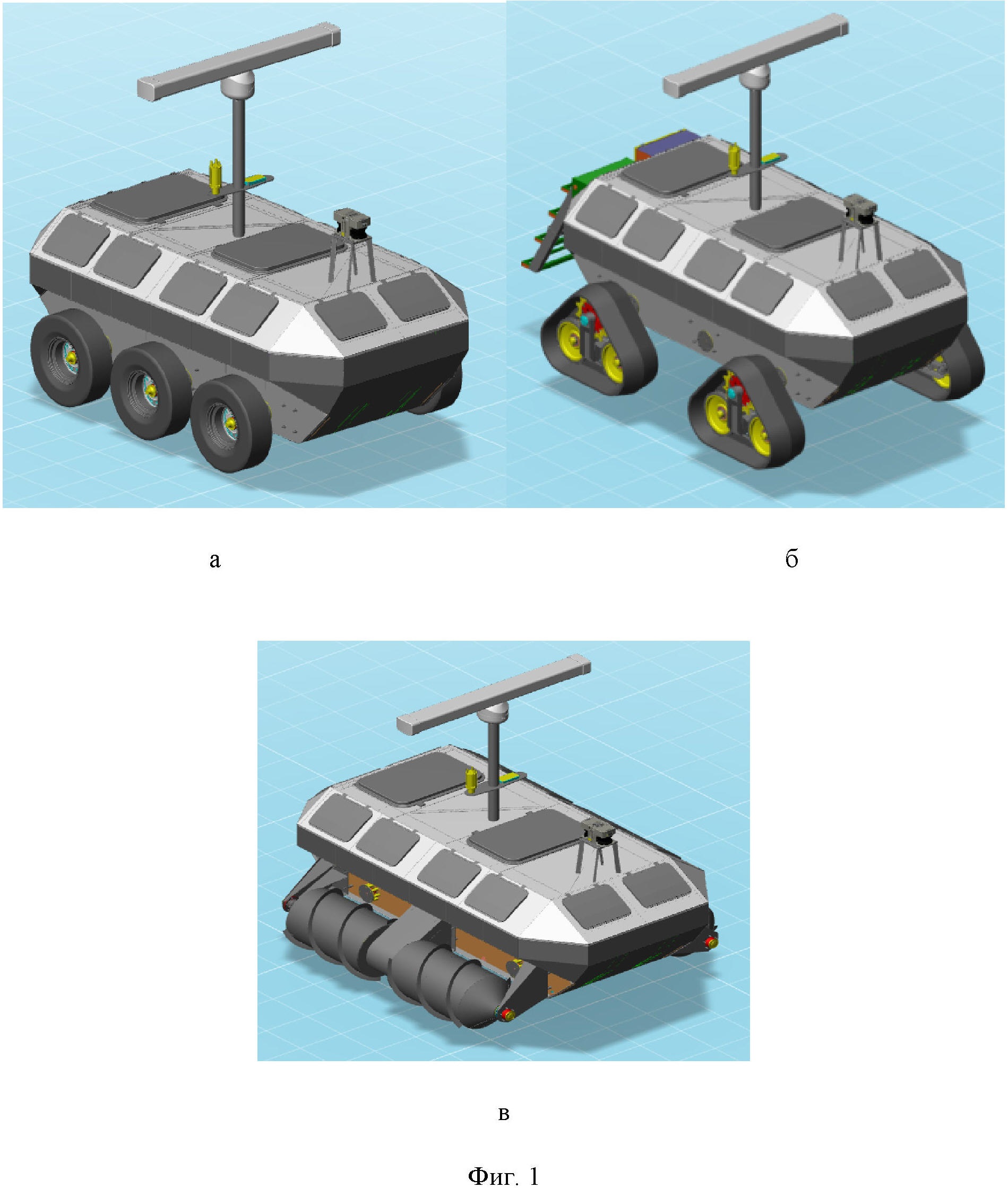
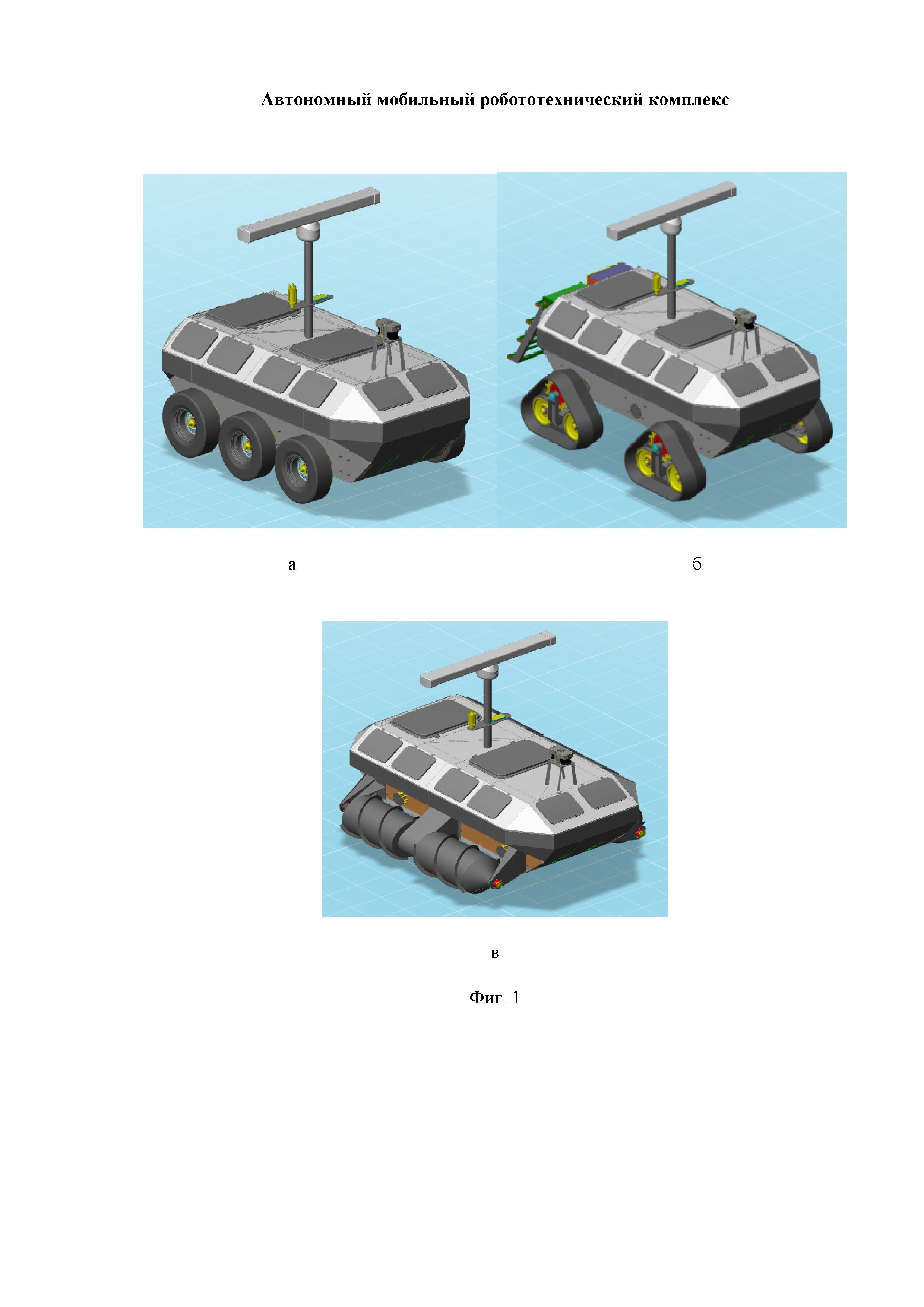
Поставленная цель достигается тем, что, в отличие от прототипа, автономный мобильный робототехнический комплекс может быть оснащено разными типами движителей (колесным, гусеничным или роторно-винтовым) (фиг. 1), на надстройке герметичного корпуса транспортного средства размещены люки, мачта, гибкая консоль и поворотные платформы, управляемые дистанционно, с установленными на них приборами мониторинга окружающей среды и навигационным оборудованием (фиг. 2), а на гибкой консоли - приборы контроля опорных свойств (проходимости) грунтовой поверхности (фиг. 3) с возможностью передачи показаний (электрического сигнала) на блок управления, реализующий управление всеми системами АМРК (фиг. 4).
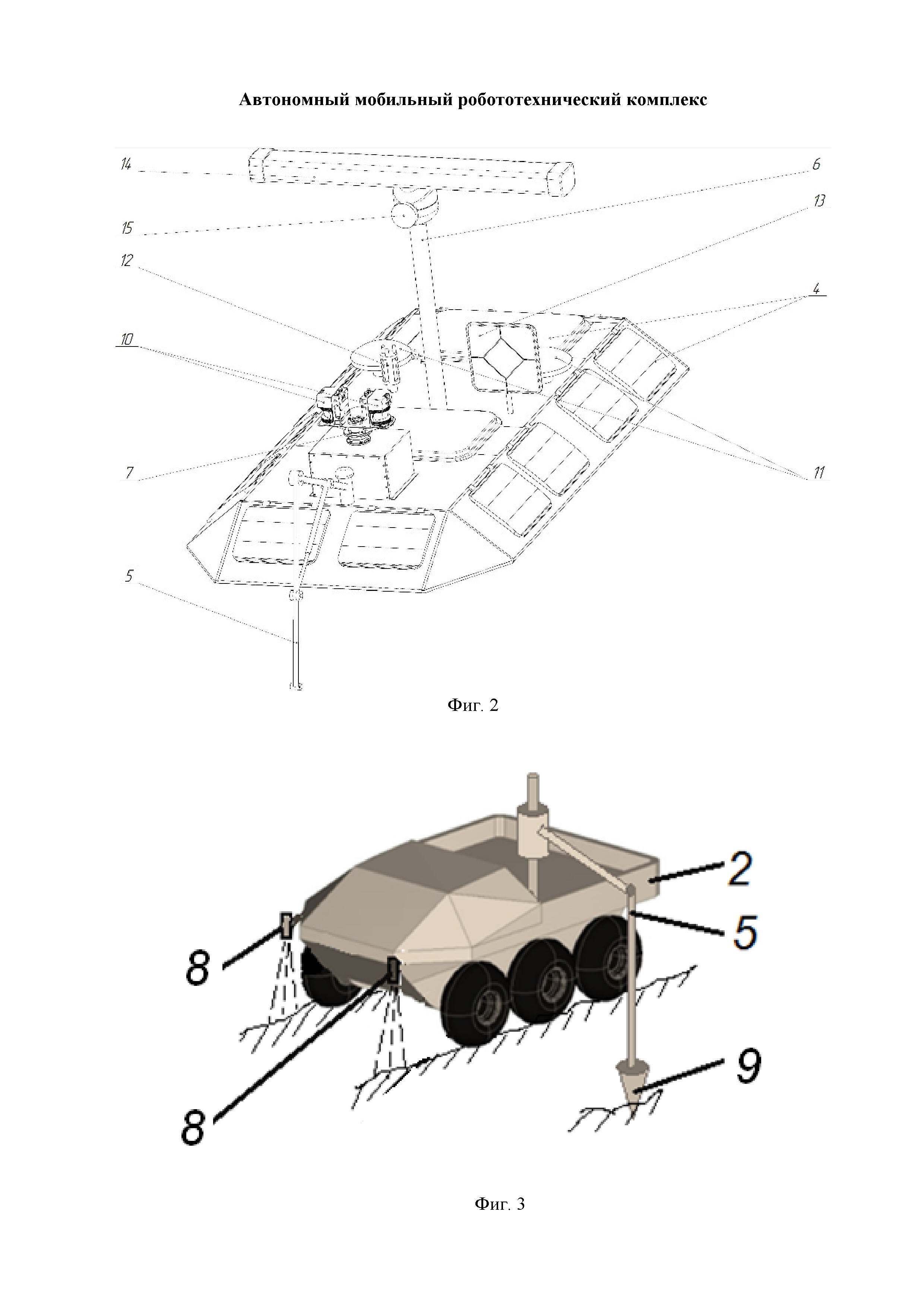
Сущность изобретения поясняется чертежами, где на фиг. 1 изображены общие виды автономного мобильного робототехнического комплекса, оснащенного разными типами движителей: а) колесным, б) гусеничным, в) роторно-винтовым. На фиг. 2 представлена надстройка с размещенными на ней люками, гибкой консолью, выдвижными мачтой и поворотной платформой, а также с установленными на них навигационными и локационными приборами. На фиг. 3 представлена установка системы контроля опорных свойств поверхности пути, состоящая из двух дальномеров и гибкой консоли, на свободном конце которой закреплен твердомер. На фиг. 4 изображена схема взаимодействия компонентов аппаратной части с блоком управления оборудованием.
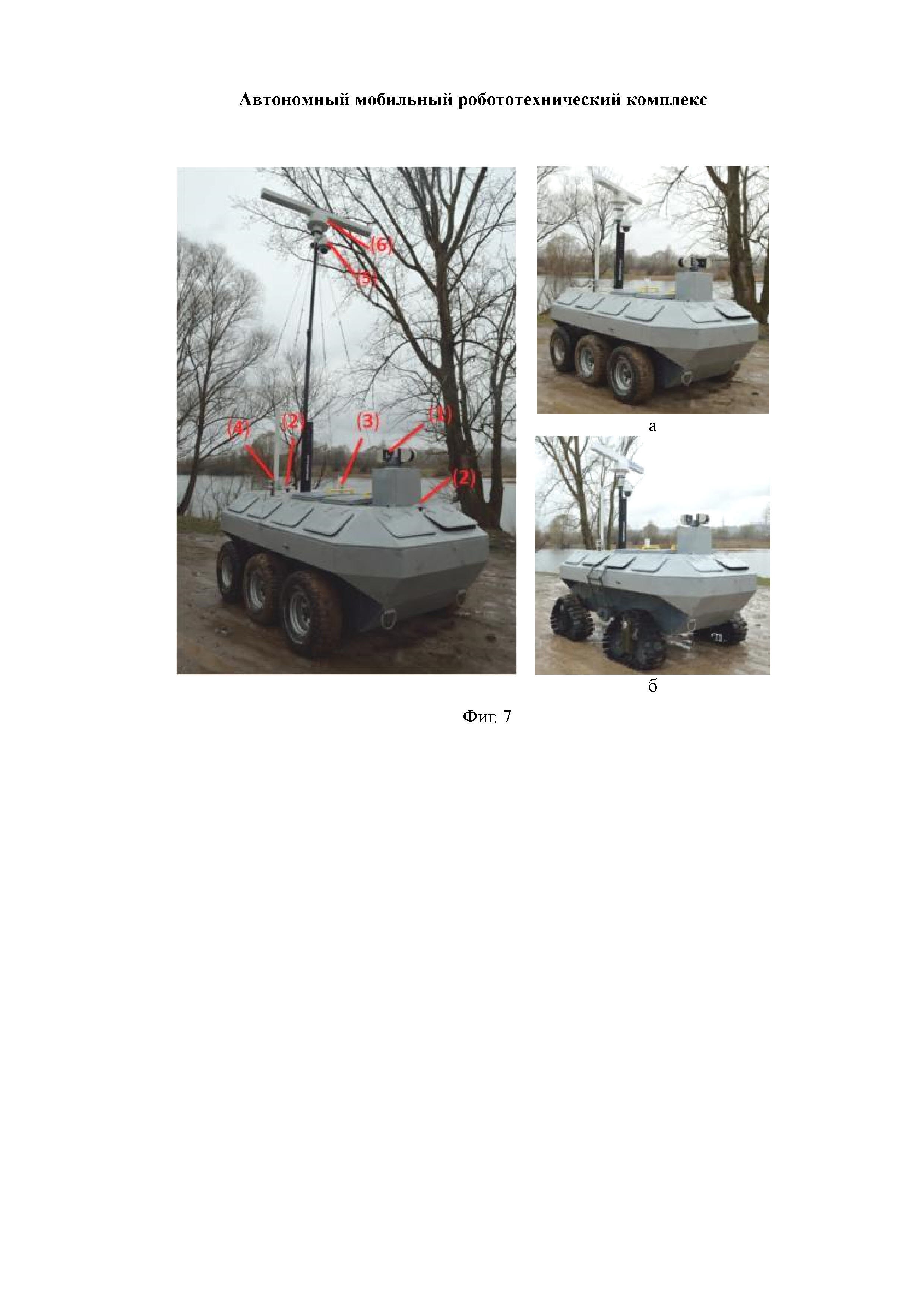
Предлагаемый автономный мобильный робототехнический комплекс содержит один из предусмотренных типов движителей 1, установленный на герметичной корпусе транспортного средства 2, надстройку 3 с дистанционно управляемыми люками 4, установленными на ней гибкой консолью 5, выдвижной мачтой 6 и выдвижной поворотной платформой 7. На герметичном корпусе транспортного средства 2 размещены два лазерных дальномера 8, а на свободном конце гибкой консоли 5 закреплен твердомер 9. Аппаратная часть включает лидары 10, установленные на выдвижной поворотной платформе 7, антенны GNSS 11, метеостанцию 12 и антенну связи 13 с наземным пунктом управления, размещенные непосредственно на надстройке 3, радиолокационную станцию 14 и видеокамеру 15, закрепленные на выдвижной мачте 6. Все компоненты аппаратной части электрически соединены с блоком управления 16.
Предлагаемый автономный мобильный робототехнический комплекс работает следующим образом, выполняя последовательно ряд операций. Во-первых, АМРК проходит путь от наземного пункта управления до заданного района мониторинга. Комплекс движется в автономном режиме по грунтовой поверхности естественного залегания по маршруту с генеральным направлением, заданным наземным пунктом управления. На этом этапе люки 4 остаются закрытыми, выдвижная мачта 6 и выдвижная поворотная платформа 7 убраны. С помощь антенн GNSS 11 и антенны связи 13 осуществляется контроль местоположения комплекса. Движитель 1, закрепленный на герметичном корпусе транспортного средства 2 и выбранный на основе информации об общих свойствах грунтовой поверхности заданного маршрута, погружается в грунт на некоторую глубину, оставляя на поверхности пути колею. Глубина колеи непрерывно фиксируется лазерными дальномерами 8 как расстояние от точки его закрепления на герметичном корпусе транспортного средства 2 до недеформированной поверхности пути, а результат измерения передается на блок управления 16 и сравнивается с некоторой предельной минимальной величиной, соответствующей допустимому погружению в грунт движителя 1 (допустимая глубина колеи), закрепленного на транспортном средстве. При опасном сближении значений этих величин, означающем возможную потерю подвижности транспортного средства, система управления движением 4 предает команду на гибкую консоль 5, которая с помощью закрепленного на ее свободном конце твердомера 9 измеряет прочность грунтовой поверхности вокруг АМРК, а показания твердомера 9 сравниваются в блоке управления 16 до тех пор, пока не будет найдена точка на поверхности пути, соответствующая приемлемой по несущей способности (прочности) грунтовой поверхность. Направление на эту точку принимается за направление маршрута на некотором ограниченном отрезке пути, фиксируется системой управления (для сравнения с заданным направлением движения). Таким образом обеспечивается автоматическая адаптация движителя 1 транспортного средства 2 к несущей способности поверхности пути и его защита от возможной потери подвижности. Восстановление движения транспортного средства по генеральному маршруту осуществляется на некотором предусмотренном отрезке пути аналогичным образом. Система позиционирования наносит точки маршрута на карту движения. По координатам этих точек осуществляется управление движением комплекса в обратном направлении.
По прибытии АМРК в заданный район мониторинга прибрежной зоны начинается второй этап работы комплекса. Комплекс осуществляет панорамный обзор побережья и передает снимки (видеозапись) в наземный пункт управления. Оператор определяет точку, с которой будет осуществляться сканирование и радиолокационное зондирование водной поверхности для замеров волнения и других параметров.
Встав на выбранную точку, АМРК в автоматическом режиме осуществляет подготовку к работе приборного комплекса, переводя его из транспортного в рабочее положение. Выполняются следующие операции. Открываются люки 4, поднимаются выдвижная мачта 6 и выдвижная поворотная платформа 7. Приводятся в действие размещенные на них лидары 10, радиолокационная станция 14 и видеокамера 15. Положение последних за счет регулирования высоты выдвижной мачты 6 выбирается таким образом, чтобы обеспечить достаточный обзор водной поверхности для радиолокационной станции 14 и видеокамеры 15. Метеостанция 12 регистрирует параметры метеорологической обстановки: скорость и направление ветра, температуру, влажность, давление и осадки. Лидары 10 осуществляют круговое панорамное сканирование водной поверхности, радиолокационная станция 14 осуществляет дистанционное зондирование водной поверхности, видеокамера 15 фиксирует накат волн. Все полученные параметры поступают на блок управления 16, где выполняется накопление, обработка и хранение результатов наблюдений. Сформированные массивы данных периодически передаются на наземный пункт управления.
По завершении работы в заданном районе мониторинга по команде из наземного пункта управления АМРК выполняет операции по переводу приборного комплекса в транспортное положение. Опускаются выдвижная мачта 6 и выдвижная поворотная платформа 7, отключаются приборы, не участвующие в обеспечении движения АМРК на маршруте следования из заданного района мониторинга к наземному пункту управления.
Таким образом решается задача наземного мониторинга окружающей природной среды, в частности морского побережья, в малодоступной (недоступной и опасной) для человека обстановке. А именно осуществляется надежная доставка приборного комплекса в заданную точку мониторинга, перевод приборного комплекса из транспортного положения в рабочее, выполнение необходимых измерений, сбор, обработка и хранение информации, передача информации на наземный пункт управления, перевод приборного комплекса из рабочего положение в транспортное и возвращение автономного мобильного робототехнического комплекса по проложенному маршруту в наземный пункт управления. При этом в процессе движения обеспечивается автоматическая адаптация транспортного средства к несущей способности поверхности пути и его защита от возможной потери подвижности.
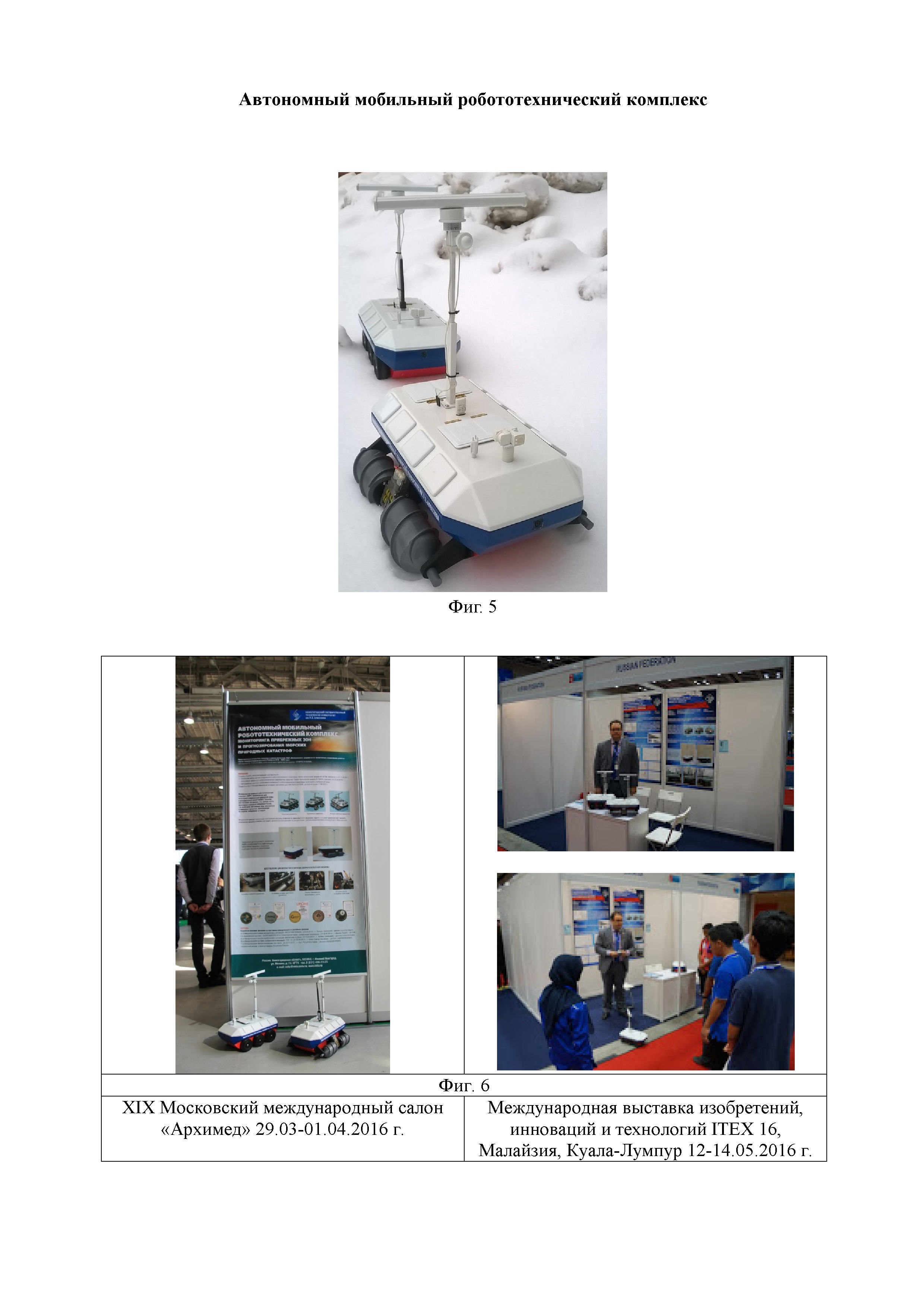
Работоспособность предлагаемого АМРК проверена на масштабных моделях и опытном образце, прошла апробацию на выставках и конкурсах инновационных проектов и в процессе полевых испытаний опытного образца на полигоне острова Сахалин.
|

Суспензия для изготовления оболочковых форм в литье по выплавляемым моделям
Способ подготовки горячекатаного проката для изготовления крепежных изделий
Жидкостекольная смесь для изготовления литейных форм и стержней и способ ее приготовления
Способ глубокой очистки хладагента r717
Способ изготовления керамических оболочковых форм для литья по выплавляемым моделям
Способ получения n-[(дибутиламино)метил]метакриламида
Способ получения биоразлагаемых разветвленных олигомерных сложных эфиров молочной кислоты и глицерина
Способ 3d печати на оборудовании с чпу с интеллектуальной оптимизацией режимов
Способ количественной оценки пережога в деформируемых термоупрочняемых алюминиевых сплавах с помощью eds-анализа
Универсальное транспортное средство на роторно-винтовом движителе
Плавучая волновая электростанция
Устройство для разрушения ледяного покрова
Стенд для исследования физико-механических свойств ледяного покрова при его разрушении механическим способом

