Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА
Вид РИД
Изобретение
Настоящее изобретение относится к области гидроакустики и предназначено для определения скорости звука по трассе распространения гидроакустических сигналов, что необходимо для повышения эффективности работы гидролокаторов освещения подводной обстановки, а также для проведения исследований и измерительных работ гидроакустической аппаратуры.
Существуют прямые и косвенные методы определения скорости распространения звука в воде. Косвенные методы предполагают предварительное измерение температуры и солености воды и дальнейший расчет по известным номограммам скорости звука (В.А. Комляков. «Корабельные средства измерения скорости звука и моделирования акустических полей в океане». СПб.: «Наука», 2003 г., стр. 50-87). Эти способы позволяют определять скорость звука по конкретным измерениям температуры и солености, которые могут быть произведены путем забора проб воды и проведением химического анализа при процедуре измерения температуры. Измерение производится с использованием специальных судов и стандартных океанографических измерительных средств, в которые входят глубоководный опрокидывающийся термометр, термометр-глубомер, батитермограф, а также комплексные гидрологические зонды. Количество параметров, измеряемых зондом, и измерительных каналов зависит от выполняемых им конкретных задач. Информация об измеренных параметрах передается в бортовые приборы по кабель-тросу. Недостатком этих методов является необходимость специализированного судна и длительная процедура измерения.
Существуют прямые методы измерения скорости звука при использовании конкретных приборов, которые измеряют скорость звука на глубине нахождения с использованием интерферометрических методов, фазовых методов, импульсных методов и частотных методов. Эти приборы, как правило, устанавливаются на борту судна и измеряют скорость звука при погружении до определенной глубины. Этот способ является дорогим и затратным и не всегда может быть использован при решении конкретных задач (там же).
Наиболее близким аналогом является способ определения скорости звука по патенту РФ №2515125.
Способ содержит излучение зондирующего сигнала, прием отраженного сигнала, измерение скорости звука на глубине их излучения и прием статическим веером характеристик направленности, оси которых разнесены на углы не меньше чем 2°, эхосигнал, отраженный от дна, принимают двумя парциальными ХН, оси которых отстоят от нормали не менее чем на 40°, измеряют угол между осями этих ХН, измеряют моменты времени прихода отраженных от дна обоих принятых эхосигналов Т1 и Т2 и по измеренному углу и по полученному отношению времен последовательно рассчитывают значение скорости звука вблизи дна.
Недостатком данного способа является то, что рассчитывается скорость звука вблизи дна, что необходимо для обеспечения работы многолучевого эхолота при вертикальном распространении зондирующего сигнала, а не по трассе при горизонтальном распространения зондирующего сигнала.
Техническим результатом изобретения является обеспечение возможности измерения скорости звука по трассе, получение реальных результатов по изменчивости скорости звука по трассе в процессе измерений с использованием одного гидроакустического канала измерения.
Указанный технический результат достигается тем, что в способе определения скорости распространения звука гидролокатором, содержащем излучение зондирующего сигнала, прием эхосигналов гидроакустической антенной со статическим веером характеристик направленности, измерение времени распространения сигналов, введены новые признаки, а именно: излучают первый и второй последовательные зондирующие сигналы через интервал времени Т в направлении неподвижного объекта, прием эхосигналов осуществляют статическим веером характеристик направленности в горизонтальном направлении, фиксируют моменты времени излучения первого и второго сигнала tиз1 и tиз2 и приема первого и второго эхосигналов tпр1, tпр2, измеряют разность времен распространения первого и второго последовательных эхосигналов (tпр1-tиз1)-(tпр2-tиз2), измеряют скорость собственного движения носителя гидролокатора Vсоб, определяют курс носителя К0, на каждой из посылок определяют направление на неподвижный объект П0, на каждой их посылок определяют угол между направлением движения носителя и направлением на неподвижный объект или курсовой угол q0=(К0-П0), и, если  и меньше 10°, определяют скорость сближения или радиальную составляющую собственной скорости носителя относительно положения неподвижного объекта по формуле Vcб=Vсоб cosq0, а скорость звука по трассе определяют по формуле Сзв=2 Vсоб cosq0T/{(tпр1-tиз1)-( tпр2-tиз2)}, при этом время между посылками определяют из условия Т>100 м/Vсоб.
и меньше 10°, определяют скорость сближения или радиальную составляющую собственной скорости носителя относительно положения неподвижного объекта по формуле Vcб=Vсоб cosq0, а скорость звука по трассе определяют по формуле Сзв=2 Vсоб cosq0T/{(tпр1-tиз1)-( tпр2-tиз2)}, при этом время между посылками определяют из условия Т>100 м/Vсоб.
Сущность предлагаемого способа заключается в следующем.
Для станций освещения ближней обстановки характерным является режим работы с периодическим излучением импульсных зондирующих сигналов. Для измерения скорости звука может быть выбран любой малоподвижный или неподвижный обнаруженный объект. Рассмотрим измерение дистанции для двух последовательных зондирующих сигналов. Предположим, что дистанция до объекта Д1. Если зондирующий сигнал излучается в момент времени tиз1, то время распространения до объекта и обратно будет равно tпр1 и оценка дистанции будет равна Д1=0,5 C(tпр1-tиз1), где C – скорость звука. Если носитель гидролокатора движется прямолинейно и равномерно со скоростью Vсоб и излучает зондирующие сигналы через равные промежутки времени Т, то за время между излучениями будет пройдено расстояние Дпр=Vсоб Т. Тогда оценка дистанции, полученная по второму зондирующему сигналу, излученному в момент времени tиз2 и принятому в момент времени tпр2, будет равна Д2=0,5C(tпр2-tиз2). Если учесть, что Д2=Д1-Vсоб Т, можем написать систему уравнений:
Д1=0,5 Сизм(tпр1-tизм1).
Д1-VсобT=0,5 Сизм(tпр2-tиз2), или Д1=0,5 Сизм(tпр2-tиз2)+Vсоб T, приравняем
0,5 Сизм(tпр1-tиз1)=0,5 Сизм(tпр2-tиз2)+Vсоб T
0,5 Сизм[(tпр1-tиз1)-(tпр2-tиз2)]=Vсоб T,
откуда можно получить оценку скорости распространения звука:
Сизм=2 Vсоб Т/{(tпр1-tиз1)-(tпр2-tиз2)}.
Однако в реальных условиях точно выбрать направление движения носителя на объект затруднительно, и тогда возникает систематическая ошибка при каждом излучении, определяемая углом между истинным положением объекта и направлением движения носителя гидролокатора, что связано с изменением их взаимного положения. Зная направление движение носителя гидролокатора, которое определяется его курсом K0, и, зная пеленг на объект П0, можно определить угол между направлением движения и положением объекта или курсовой угол цели q0=(К0-П0), и определить скорость сближения или радиальную составляющую собственной скорости относительно положения неподвижного или малоподвижного объекта. Для этого надо оценку собственной скорости носителя умножить на косинус q0. Как правило, курсовой угол объекта в современных гидроакустических станциях определяется автоматически в процессе обнаружения и определения дистанции и всегда отображается на индикаторе там же, где и собственная скорость. Поэтому, определив собственную скорость, можно получить скорость сближения с объектом по формуле Vсб=Vсоб cosq0. Окончательно скорость звука по трассе будет равна Сзв=2 Vсоб cosq0T/{(tпр1-tиз1)-(tпр2-tиз2)}. При малом интервале T между излучениями величина между временными интервалами (tпр1-tиз1)-(tпр2-tиз2) сравнима с погрешностью измерения временного положения эхосигнала, что приведет к увеличению ошибки оценки скорости звука. Поэтому предлагается увеличить время интервала между излучениями до величины Т>100 м/Vсоб, что приведет к уменьшению дисперсии оценки скорости звука. Точность измерения временного интервала между излучениями может быть, обеспеченная современными методами, достаточно высокая и составлять величину меньше 1 мс. Определение временного положения объекта может быть обеспечено с использованием коротких зондирующих сигналов по положению максимума сигнальной функции на выходе согласованного фильтра. Положение максимума сигнальной функции обладает наименьшей дисперсией. Дисперсия оценки разности временных положений неперекрывающихся радиоимпульсов на выходе системы обработки будет определяться выражением  где τ - длительность используемого зондирующего сигнала, Е - энергия радиоимпульса, N - уровень помехи (Б.Н. Митяшев. «Определение временного положения импульсов при наличии помех». Сов. Радио. М., 1962 г., стр. 24). Для длительности 1 мс и малом отношении сигнал/помеха (E/N)=2 б=0,67 мс, что меньше длительности используемого зондирующего сигнала, и существенно меньше, чем интервал Т>100 м/Vсоб.
где τ - длительность используемого зондирующего сигнала, Е - энергия радиоимпульса, N - уровень помехи (Б.Н. Митяшев. «Определение временного положения импульсов при наличии помех». Сов. Радио. М., 1962 г., стр. 24). Для длительности 1 мс и малом отношении сигнал/помеха (E/N)=2 б=0,67 мс, что меньше длительности используемого зондирующего сигнала, и существенно меньше, чем интервал Т>100 м/Vсоб.
Ошибка измерения скорости движения носителя современными измерителями составляет величину меньше 0,03 м/с (А.В. Богородский, Д.Б. Островский. «Гидроакустические навигационные и поисково-обследовательские средства». Санкт Петербург, 2009 г. Изд. ЛЭТИ, стр. 48). В этих условиях оценка скорости звука при двух последовательных измерениях за счет ошибки скорости движения носителя будет в пределах 1 м/с. Курсовой угол объекта К0 и величина П0 определяется по ширине элементарной характеристики направленности, которая составляет в современных системах порядка 10, что обеспечит определение пороговой величины 100 с достаточно малой погрешностью.
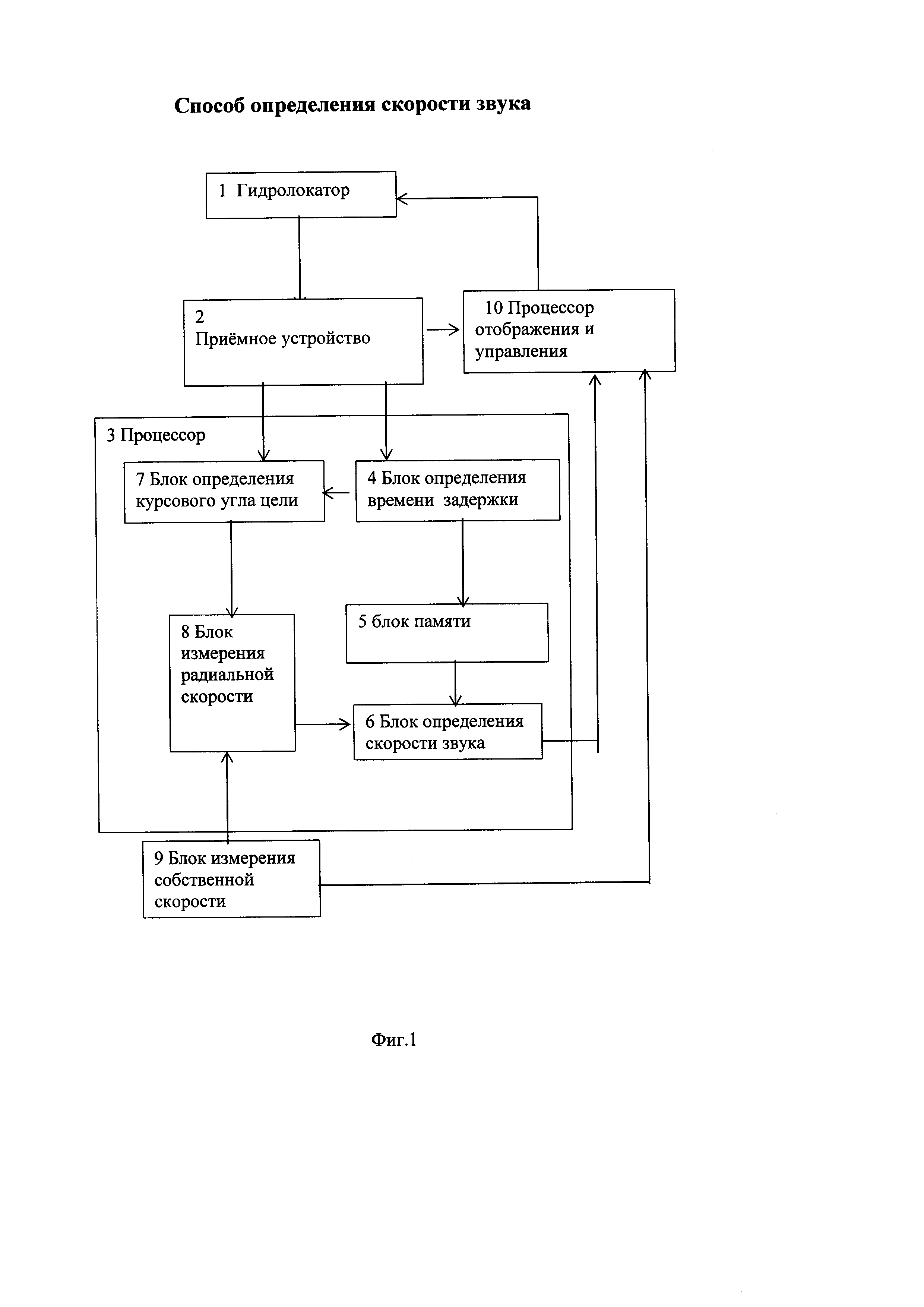
На Фиг. 1 представлена блок схема устройства, реализующая предлагаемый способ.
На Фиг. 1 гидролокатор 1 через приемное устройство 2 соединен с процессором 3, в состав которого входят последовательно соединенные блок 4 определения времени задержек, блок 5 памяти, блок 6 определения скорости звука, выход которого соединен через процессор 10 отображения и управления со входом гидролокатора 1. Второй выход приемного устройства 2 через последовательно соединенные блок 7 определения курсового угла и блок 8 измерения радиальной скорости соединен со вторым входом блока 6 определения скорости звука, а третий выход приемного устройства 2 соединен со вторым входом процессора 10 управления и отображения. Второй вход блока 8 соединен с блоком 9 измерения собственной скорости, второй выход которого соединен с третьим входом процессора 10.
Гидролокатор 1, приемное устройство 2 являются известными устройствами, которые используются в прототипе и достаточно подробно описаны в отечественной литературе (А.С. Колчеданцев. «Гидроакустические станции». Судостроение. Л., 1982 г., А.Н. Яковлев Г.П. Кабаков. «Гидролокаторы ближнего действия». Судостроение Л., 1983 г.). Блок 4 измерения времен прихода является известным устройством, который может быть реализован по схеме одноканального цифрового обнаружителя (стр. 107, там же). Блок 5 памяти и блок 7 определения курсового угла, блок 8 определения скорости сближения являются стандартными процедурами цифровой вычислительной техники и могут быть реализованы программным образом на любых вычислительных средствах. Все блоки, используемые для определения скорости звука, могут быть выполнены в тех же спецпроцессорах, на которых реализуется работа приемных трактов современных гидролокационных станций. Это стандартные спецпроцессоры, которые работают по разработанным программам и жесткой логике управления при поступлении исходной информации (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустическая техника». СПб.: «Наука», 2004 г., с. 281-289). Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко. Цифровая обработка сигналов. СПб.: «БХВ - Петербург», 2011 г.). Гидроакустический измеритель собственной скорости движения блок 9 является известным устройством, которые выпускаются серийно и устанавливаются на всех современных судах (А.В. Богородский Д.Б. Островский. «Гидроакустические навигационные и поисково-обследовательские средства». Санкт Петербург, 2009 г. Изд. ЛЭТИ, стр. 40-81).
С использованием рассматриваемого устройства определение скорости звука по трассе происходит следующим образом. Гидролокатор 1, установленный на подвижном носителе, движется со скоростью Vсоб и излучает зондирующий сигнала. Эхосигнал, отраженный от неподвижного объекта, принимается гидролокатором 1 и обрабатывается в 2 приемном устройстве. В приемном устройстве современных гидролокаторов, как правило, используется статический веер горизонтальных характеристик направленности, где реализованы стандартные процедуры измерения помехи, выбора порога и обнаружения эхосигнала, которые реализованы в прототипе. Эхосигналы из блока 2 поступают в процессор 3, в блок 4, производится обнаружение временного положения максимальной амплитуды эхосигнала, которое передается в блок памяти 5 и определяется разность tпр1-tиз1. Одновременно, при обнаружении эхосигнала с максимальной амплитудой в блоке 7, определяется пространственный канал, которому соответствует максимальная амплитуда эхосигнала, и по нему определяется курсовой угол между направлением движения К0 носителя гидролокатора и направлением П0, по которому принят эхосигнал. Если величина отклонения положения обнаруженного объекта не больше 10 градусов, то значение этого отклонения поступает в блок 8 измерения радиальной скорости или скорости сближения Vсб=Vсоб cosq0, на второй вход которого передается значение собственной скорости, измеренное в блоке 9. Определенное в блоке 8 значение радиальной скорости подается в блок 6 определения скорости звука. Информация о наличии данных для определения скорости звука передается в процессор 10 управления и отображения, и формируется команда для излучения второго зондирующего сигнала. Второй эхосигнал, отраженный от неподвижного объекта, принимается гидролокатором 1, обрабатывается блоком 2 и процессором 3. В блоке 4 определяется время задержки эхосигнала по второму зондирующему сигналу и через блок 5 памяти разность tпр2-tиз2 передается в блок 6 определения скорости звука. Одновременно наличие максимального сигнала передается в блок 7 определения курсового угла объекта и при том же угловом положении определяется такое же значение скорости сближения. В блоке 6 определяется разница временных положений принятых последовательных эхосигналов и по измеренной радиальной скорости определяется скорость распространения звука по трассе по формуле Сизм=2 Vсоб cosq0 T/{(tпр1-tиз1)-(tпр2-tиз2)}. Второй выход блока 9 измерения собственной скорости соединен с третьим входом процессора 10 управления и отображения для определения интервала Т между излучениями зондирующего сигнала.
Таким образом, предложенная процедура измерения последовательных временных интервалов, измерение собственной скорости движения и скорости сближения с учетом положения отражателя позволяют определять скорость распространения звука по трассе с использованием подвижного излучателя и неподвижного объекта.
Способ определения скорости распространения звука гидролокатором, содержащим излучение зондирующего сигнала, прием эхосигналов гидроакустической антенной со статическим веером характеристик направленности, измерение времени распространения сигналов, отличающийся тем, что излучают первый и второй последовательные зондирующие сигналы через интервал времени Т в направлении неподвижного объекта, прием эхосигналов осуществляют статическим веером характеристик направленности в горизонтальном направлении, фиксируют моменты времени излучения первого и второго сигнала t и t и приема первого и второго эхосигналов t, t, измеряют разность времен распространения первого и второго последовательных эхосигналов (t-t)-(t-t), измеряют скорость собственного движения носителя гидролокатора V, определяют курс носителя К, на каждой из посылок определяют направление на неподвижный объект П, на каждой из посылок определяют угол между направлением движения носителя и направлением на неподвижный объект или курсовой угол q=(К-П), и, если q=q и меньше 10, определяют скорость сближения или радиальную составляющую собственной скорости носителя относительно положения неподвижного объекта по формуле V=Vcosq, а скорость звука по трассе определяют по формуле С=2VcosqT/{(t-t)-(t-t)}, при этом время между посылками определяют из условия Т>100 м/V.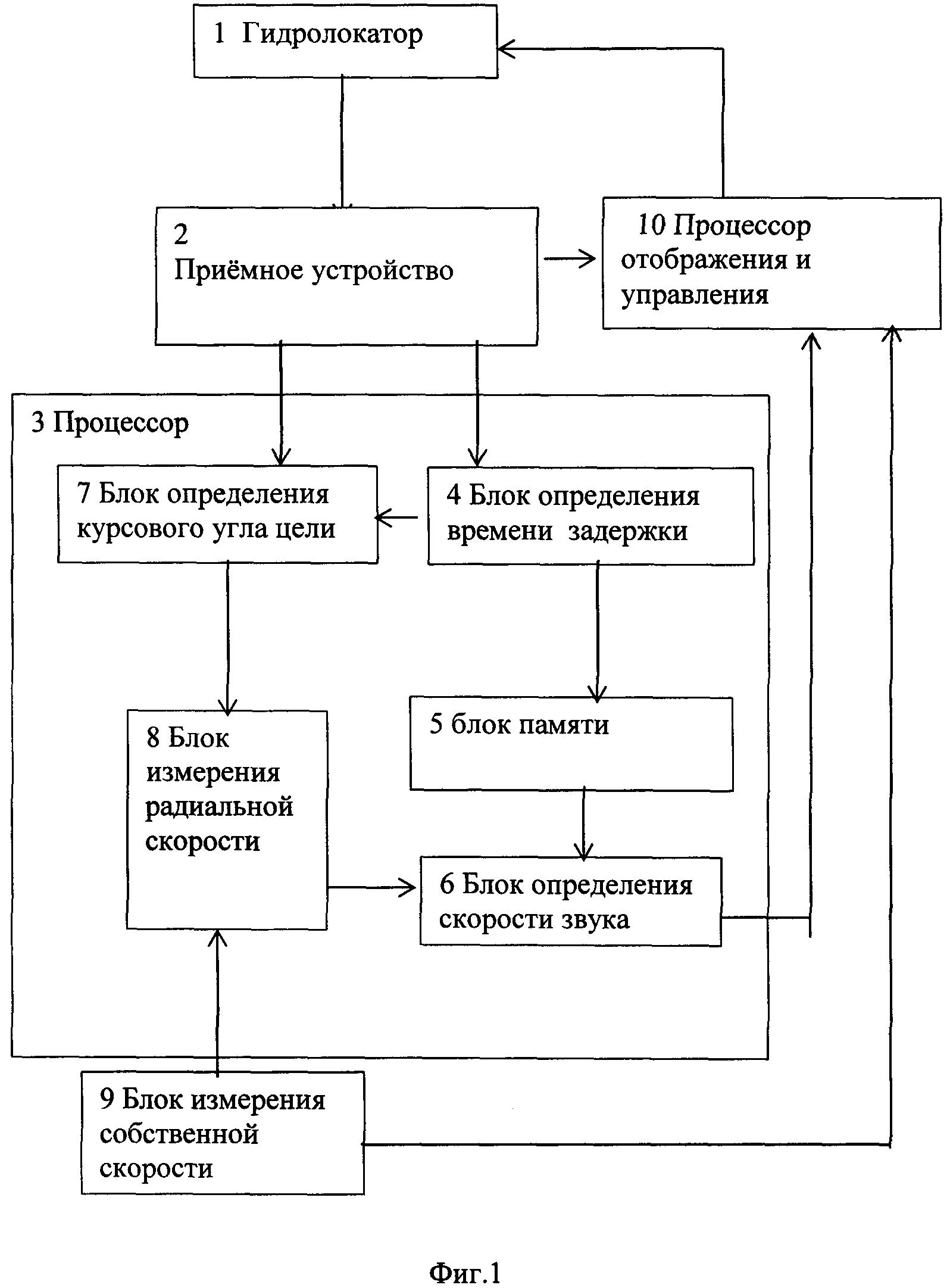
Способ автоматического определения параметров айсберга гидролокационным методом
Способ дистанционного определения рельефа и осадки подводной части айсберга
Способ классификации целей, адаптированный к гидроакустическим условиям
Способ измерения составляющих суммарной помехи работе пассивной гидроакустической станции
Способ определения глубины погружения объекта
Способ измерения скорости звука по трассе
Система автоматического обнаружения и классификации гидролокатора ближнего действия
Устройство постановки и выборки гибкой протяженной буксируемой антенны
Способ обнаружения объекта и измерения его параметров
Способ наведения торпеды, управляемой по проводам
Способ автоматического определения параметров айсберга гидролокационным методом
Способ дистанционного определения рельефа и осадки подводной части айсберга
Способ классификации целей, адаптированный к гидроакустическим условиям
Способ измерения составляющих суммарной помехи работе пассивной гидроакустической станции
Способ определения глубины погружения объекта
Способ измерения скорости звука по трассе
Система автоматического обнаружения и классификации гидролокатора ближнего действия
Устройство постановки и выборки гибкой протяженной буксируемой антенны
Способ обнаружения объекта и измерения его параметров
Способ наведения торпеды, управляемой по проводам

