Результат интеллектуальной деятельности: СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ МЕСТООПРЕДЕЛЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано для определения координат подвижных наземных объектов, в частности железнодорожных и автотранспортных средств, особенно в автономных и частично автономных навигационных системах, передвигающихся по известным дорогам. Технический результат заявленного изобретения - расширение функциональных возможностей и повышение точности определения координат. Для достижения данного результата в способе, основанном на определении местоположения подвижных наземных объектов в автономном режиме, при котором осуществляют отсчет от последних известных координат, полученных при помощи обработки сигналов спутниковой навигационной системы и/или сигналов от опорных средств, измеряют параметры движения объектов и производят расчет географических координат.
Поставленная задача возникает при необходимости знать точные координаты подвижного объекта, для мониторинга состояния как самих подвижных объектов, так и состояния элементов инфраструктуры железнодорожного и автомобильного транспорта, в том числе и для уменьшения негативных последствий аварий и катастроф.
Известен способ определения координат наземного подвижного объекта с помощью спутниковых навигационных систем [Яценков B.C. Основы спутниковой навигации. Системы GPS NAVSTAR и ГЛОНАСС. - М., 2005. - 272 с., с. 69-74]. Недостатками данного способа является то, что сигнал от спутниковых навигационных систем, таких как GPS и ГЛОНАСС, плохо проходит в условиях высокой плотности городской застройки, гор, в том числе горных ущелий, сильной облачности, может плохо проходить в условиях лесистой местности, может быть эффективно подавлен при помощи радиопомех и, наконец, просто отсутствовать в условиях нестабильной военно-политической ситуации и т.д.
Известен также способ определения местоположения подвижных наземных объектов, в частности автотранспортных средств [Ашихмин А.В., Козьмин В.А., Крыжко И.Б. Интегрированная навигационная система для мобильных станций радиоконтроля // Специальная техника, 2008 г., №5-6, с. 34-45], заключающийся в следующем: при пропадании навигационного сигнала, поступающего со спутника на приемник GPS, система переходит в автономный режим, который ограничен по длительности (1-3 минуты) из-за накопления ошибок при определении координат подвижного наземного объекта. Данный способ реализуется при работе навигационной системы в автономном режиме, в состав которой входит модуль вычислителя и набор модулей датчиков: два приемника GPS, гироскоп, датчик скорости автомобиля, показания которого пропорциональны оборотам колеса. Он не учитывает угол места (вертикальный угол), следовательно, невозможно точно рассчитать высоту (координату по высоте). Недостатками этого способа являются ограниченные функциональные возможности и невысокая точность определения координат подвижного наземного объекта.
Известно устройство, реализующее способ взаимного учета координат транспортного средства для их взаимной коррекции [Устройство для определения координат транспортного средства, А.С. СССР №1217051]. Однако в нем не учитывает возможного использования спутниковой навигации и тем самым требует неприемлемо высокой точности цифровой модели местности.
Наиболее близкими по технической сущности к предлагаемому является способ-прототип, основанный на определении местоположения подвижных наземных объектов в автономном режиме, при котором осуществляют отсчет от последних известных координат, полученных при помощи обработки сигналов спутниковой навигационной системы. При этом измеряют параметры движения объектов и производят расчет географических координат. Согласно изобретению измеряют дирекционный угол с помощью измерителя угла поворота, угол места с помощью акселерометра и радиальную скорость с помощью доплеровского радиолокационного измерителя скорости, осуществляют расчет координат объекта в прямоугольной системе и путем пересчета определяют местоположение наземного подвижного объекта в географической системе координат [Способ определения местоположения наземных подвижных объектов (RU 2445576)].
Сущность способа-прототипа заключается в следующем.
В момент пропадания сигнала от спутниковой навигационной системы запоминаются последние полученные координаты от датчика GPS/ГЛОНАСС: широта, долгота, высота. Затем осуществляется переход навигационной системы в автономный режим, при котором система определяет текущие координаты мобильного объекта относительно точки начала движения на основе автономных измерений текущих значений скорости, азимута и угла места в дискретные моменты времени.
Местоопределение осуществляется в прямоугольной относительной системе координат X, Y, Z, где X, Y - координаты в горизонтальной плоскости, Z - в вертикальной плоскости. При этом начальная точка местоположения имеет координаты Х0=0, Y0=0, Z0=0.
Модель местоопределения предусматривает представление сложной траектории перемещения объекта в виде последовательности прямых участков, длина каждого из которых равна пути, который проходит подвижный наземный объект в последовательные краткосрочные одинаковые отсчеты (моменты) времени Δt, в которые осуществляется измерение трех параметров движения: радиальной скорости Vi, угла направления (дирекционного угла) αi и угла места θi, и пересчет текущих координат наземного подвижного объекта.
Недостатком способа-прототипа является постоянно нарастающая погрешность за счет применения линеаризации траектории (дороги) и не учет связей между значениями координат в каждой конкретной точке этой дороги.
Задача предлагаемого технического решения - расширение функциональных возможностей и повышение точности определения координат.
Пространственно-распределенная информация, получаемая при строительстве и эксплуатации автомобильных и железных дорог, а также с помощью дистанционного зондирования Земли и средств спутниковой навигации составляет три большие группы: семантическую, метрическую и топологическую. Структурированная совокупность этих групп информации о конкретной территории, представленной в форме, пригодной для автоматизированной обработки, образует цифровую модель местности (ЦММ).
В основе такой ЦММ заложена способность одной группы информации (как системы) использовать части другой группы, то есть способность взаимно использовать информацию в каждой из этих групп (систем).
Задача создания высокоточных систем позиционирования подвижных единиц транспорта (ПЕТ) напрямую связана собеспечением безопасности движения. Одним из перспективных путей ее решения является тесная интеграция позиционной информации от спутниковых навигационных систем (СНС) с показаниями бортовой инерциальной навигационной системы (БИНС). Но на сегодняшний день разработка алгоритмов тесной интеграции предполагает использование только линеаризованных первичных измерений СНС и линейных уравнений ошибок БИНС, устойчивых лишь на небольших интервалах времени, что накладывает серьезные ограничения на временной интервал автономного движения объекта (например, при пропадании сигналов спутниковых измерений).
Современные информационные технологии позволяют использовать 3D цифровые модели путей (ЦМП), основанные на ЦММ, определять с высокой точностью координаты текущего местонахождения ПЕТ, т.е. их положение на ЦМП. Для решения этой задачи необходимо обеспечить несколько условий, в то числе.
1. Построение (и физическую реализацию) с заданной точностью ЦМП (с помощью опорных ориентиров - рядовых и фундаментальных реперов) и соответствующей привязкой ключевых элементов автомобильной и железнодорожной инфраструктуры - зданий, стационарных технических объектов и пр.
2. Высокоточное позиционирование ПЕТ.
В последнее время подходы к решению данной задачи и в России, и в мировой практике реализуются, в основном, по двум направлениям: за счет использования навигационной информации непосредственно от СНС на борту ПЕТ и интеграцией измерений БИНС с координатно-скоростной информацией от СНС.
Подход, предложенный в способе-прототипе, не в состоянии полностью решить проблему позиционирования ПЕТ гарантированно и с требуемой точностью в силу следующих обстоятельств:
1) отказов работы СНС при высоком уровне атмосферных помех, в туннелях, глубоких карьерах, в горах, при многократных отражениях от складок местности и т.п.;
2) необходимости создания дорогостоящей (особенно с учетом протяженности отечественных железных дорог) и сложной сети станций дифференциальных поправок для обеспечения требуемого уровня точности;
3) изменения точности СНС в зависимости от конфигурации спутникового созвездия, наблюдаемого в текущий момент времени, а также от помех, искажающих спутниковые сообщения при их прохождении через тропосферу и ионосферу;
4) принципиального роста стоимости и сложности СНС с повышением требований к ее точности.
При реализации подхода, предлагаемого в заявляемом способе, нами использован «режимом тесной интеграции», при котором ЦМП и первичная позиционно-скоростная информация, полученная от СНС непосредственно используется для коррекции ИНС.
Целесообразность использования этого режима обусловлена тем, что:
- в процессе обработки информации используется вся навигационная информация от ИНС и СНС;
- интегрированная НС может работать в условиях малого количества наблюдаемых спутников, когда штатная работа СНС невозможна;
- возможно совместное комплексное использование параметров ЦМП и СНС;
- возможно комплексное использование навигационной аппаратуры различных производителей.
Таким образом, способ повышения точности местоопределения наземного подвижного объекта в автономном режиме включает:
- осуществление отсчета от последних известных координат, полученных при помощи обработки сигналов спутниковой навигационной системы и/или ЦМП посредством реперов;
- измерение параметров движения объектов;
- измерение дирекционного угла;
- расчет координат объекта в прямоугольной системе;
- пересчет местоположения наземного подвижного объекта;
- вычисление коэффициентов согласования прямоугольных координат точки пути на основании информации от спутниковой навигационной системы и/или ЦМП;
- последующий пересчет значений координат подвижного объекта;
- использование координат опорных объектов цифровой 3D модели пути (дороги);
- одновременное использование спутниковой навигационной системы и опорных объектов 3D модели дороги на основе принципов кворумного резервирования.
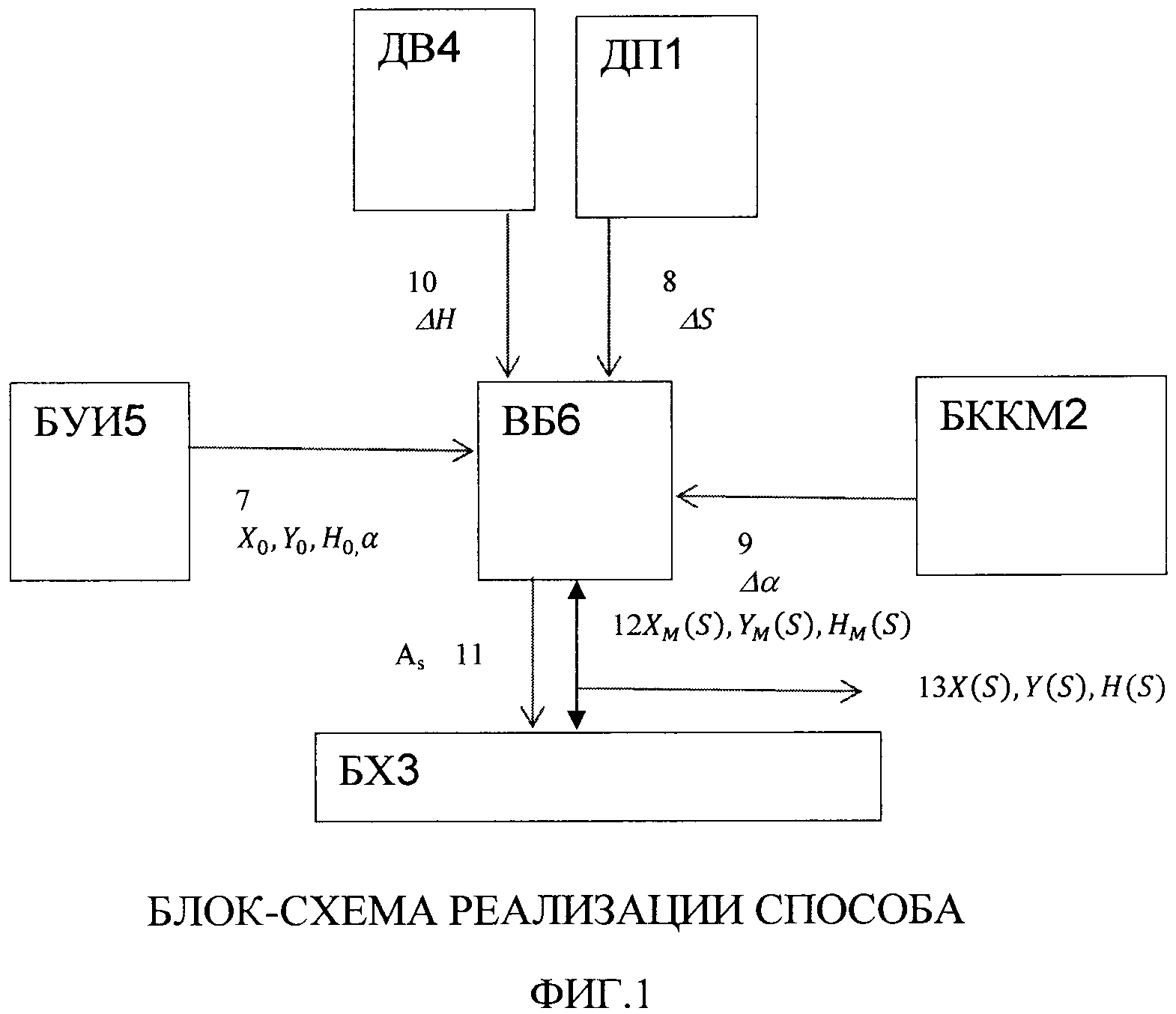
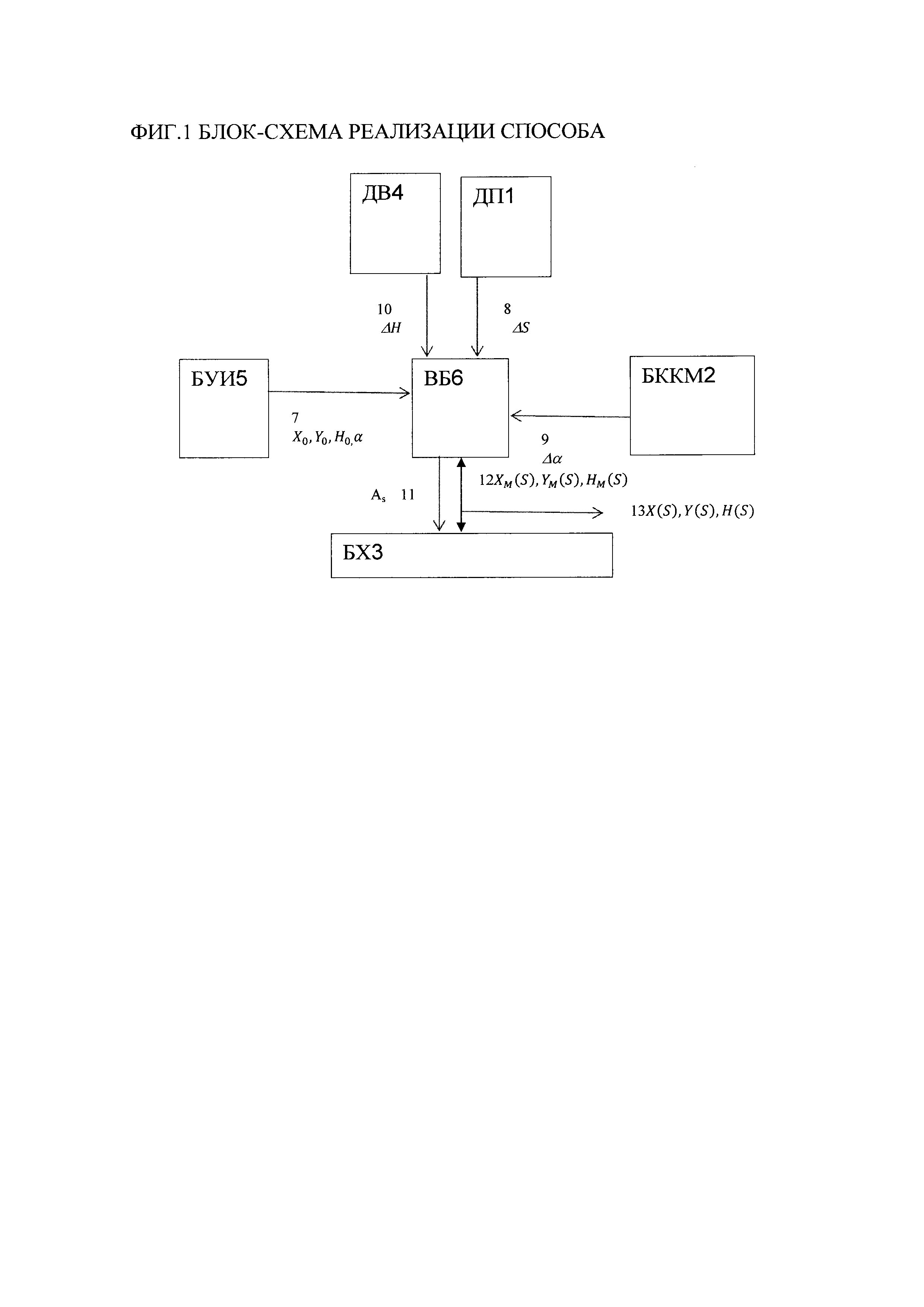
Устройство, реализующее заявленный способ, включает (Фиг. 1) датчик пути 1 (ДП), блок контроля курса и местоположения (БККМ) 2, блок хранения ЦМП (БХ) 3, датчик высоты над уровнем моря (ДВ) 4, блок управления и индикации (БУИ) 5, вычислительный блок (ВБ) 6 и работает следующим образом.
В исходном состоянии из БУИ 5 в ВБ 6 записываются на основании ЦМП исходные данные 7 Х0, Y0, Н0, α, соответствующие координатам движущегося объекта в начале движения и начальному дирекционному углу. В процессе своего движения ДП 1, БККМ 2 и ДВ 4 вырабатывают сигналы о текущих значениях приращения пройденного пути ΔS 8, дирекционного угла Δα 9 и высоты над уровнем моря ΔН 10. После преобразования типа: «аналог-код» эти сигналы поступают в ВБ 6, где обрабатываются по алгоритму решения прямой геодезической задачи, т.е. определяется текущие значения координат XT и YT формулам

кроме того, там же определяется величина пройденного пути S по формуле:

В соответствии со значением S ВБ 6 вырабатывает адрес AS 11, по которому в БХ ЦМП хранятся параметры XM(S), YM(S), HM(S) 12, определяющие значения координат траектории эталонной модели дороги. Так как очевидно, что для каждой реальной железнодорожной трассы значения координат каждой ее точки между собой связаны, то предоставляется возможным это учесть при определении фактических значений координат движущегося транспортного средства. Поэтому в ВБ определяют коэффициенты согласования пути и величин коррекции курсового угла для пар координат {X, Y}, {X, H}, {Y, Н} по формулам



ΔX=XT(S)-XM(S);
где ΔY=YT(S)-YM(S);
ΔH=HT(S)-HM(S);
Попарно откорректированные значения текущих координат ПЕТ получают в вычислительном блоке по формулам



После усреднения в вычислительном блоке получают окончательные значения координат по формулам



и передаются в потоке данных 13 в БХ и систему управления ПЕТ.
При этом в случае наличия связи со СНС информацию получает от самой системы, а при потере связи со спутниками используются значения координат от ЦМП.
Таким образом, предлагаемый способ позволяет производить определение координат подвижного наземного объекта, включая координату по высоте, а также определять его местоположение не только на равнинной, но и горной местности, в условиях, когда невозможно определить его координаты при помощи спутниковой навигационной системы.
БИБЛИОГРАФИЯ
1. Яценков B.C. Основы спутниковой навигации. Системы GPS NAVSTAR и ГЛОНАСС. - М., 2005. - 272 с., с. 69-74.
2. Ашихмин А.В., Козьмин В.А., Крыжко И.Б. Интегрированная навигационная система для мобильных станций радиоконтроля // Специальная техника, 2008 г., №5-6, с. 34-45.
3. Устройство для определения координат транспортного средства, А.С. СССР №1217051.
4. Способ определения местоположения наземных подвижных объектов (RU 2445576).
Инерционный маятниковый генератор
Инерционный маятниковый генератор
Способ идентификации параметров навигационных спутников
Способ идентификации параметров навигационных спутников
Способ формирования цифровой план-схемы объектов сельскохозяйственного назначения и система для его реализации
Способ определения координат навигационных спутников
Способ идентификации протяженных объектов земной поверхности
Способ идентификации параметров навигационных спутников с компенсацией погрешностей навигационного приемника
Оптоэлектронный компромиссный сумматор
Оптический цифроаналоговый преобразователь
Инерционный маятниковый генератор
Инерционный маятниковый генератор
Способ идентификации параметров навигационных спутников
Способ идентификации параметров навигационных спутников
Способ формирования цифровой план-схемы объектов сельскохозяйственного назначения и система для его реализации
Способ определения координат навигационных спутников
Способ идентификации протяженных объектов земной поверхности
Способ идентификации параметров навигационных спутников с компенсацией погрешностей навигационного приемника
Оптоэлектронный компромиссный сумматор
Оптический цифроаналоговый преобразователь

